 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Mean Field-Based Dynamic Backoff Optimization for MIMO-Enabled Grant-Free NOMA in Massive IoT Networks
1 School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing, 100044, China
2 Department of Information Systems Technology and Design Pillar, Singapore University of Technology and Design, Singapore, 487372, Singapore
3 Nokia Group, Alcatel Lucent Shanghai Bell, Shanghai, 200120, China
* Corresponding Author: Hongwei Gao. Email:
Journal on Internet of Things 2024, 6, 17-41. https://doi.org/10.32604/jiot.2024.054791
Received 07 June 2024; Accepted 31 July 2024; Issue published 26 August 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the 6G Internet of Things (IoT) paradigm, unprecedented challenges will be raised to provide massive connectivity, ultra-low latency, and energy efficiency for ultra-dense IoT devices. To address these challenges, we explore the non-orthogonal multiple access (NOMA) based grant-free random access (GFRA) schemes in the cellular uplink to support massive IoT devices with high spectrum efficiency and low access latency. In particular, we focus on optimizing the backoff strategy of each device when transmitting time-sensitive data samples to a multiple-input multiple-output (MIMO)-enabled base station subject to energy constraints. To cope with the dynamic varied channel and the severe uplink interference due to the uncoordinated grant-free access, we formulate the optimization problem as a multi-user non-cooperative dynamic stochastic game (MUN-DSG). To avoid dimensional disaster as the device number grows large, the optimization problem is transformed into a mean field game (MFG), and its Nash equilibrium can be achieved by solving the corresponding Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck-Kolmogorov (FPK) equations. Thus, a Mean Field-based Dynamic Backoff (MFDB) scheme is proposed as the optimal GFRA solution for each device. Extensive simulation has been fulfilled to compare the proposed MFDB with contemporary random access approaches like access class barring (ACB), slotted-Additive Links On-line Hawaii Area (ALOHA), and minimum backoff (MB) under both static and dynamic channels, and the results proved that MFDB can achieve the least access delay and cumulated cost during multiple transmission frames.Keywords
In the 6G IoT paradigm, grant-free (GF) with non-orthogonal multiple access (NOMA) techniques is considered a key enabler for massive ultra-reliable and low-latency communication (mURLLC) services to facilitate smart transportation, smart factory, smart grid, and other mission-critical applications [1–3]. GF random access allows wireless terminals to transmit their preamble and data to the base station (BS) in one shot and avoid the four-handshake process in grant-based random access [4]. The combination of GF and NOMA simultaneously solves the problem of access delay, signaling overhead, as well as the scarcity of orthogonal channel resources in conventional massive access schemes [5–7]. Existing NOMA schemes for GF access include power-domain NOMA (PD-NOMA), code-domain NOMA, or interleave-based NOMA [8]. While PD-NOMA has been studied extensively in [5–7], it may introduce a long decoding delay for massive GF access devices due to the successive interference cancellation (SIC) receiver employed to distinguish different PD-NOMA signals sequentially. On the contrary, in code-domain NOMA, such as Sparse Code Multiple Access (SCMA), it allows multiple users to occupy the same resource block at the same time, achieving efficient use of spectrum resources, and SCMA uses the message passing algorithm (MPA) for detection [9]. MPA has low complexity and good performance. When multiple users access at the same time, it can effectively detect and decode users, which is crucial to support large-scale IoT device access.
Meanwhile, massive multiple-input multiple-output (MIMO) antennas are expected to be equipped on all 6G BSs. By using receiver beamforming (e.g., Zero-Forcing (ZF) [10]) at the BS, GF-NOMA transmitters can be differentiated based on their spatial characteristics, which means the access devices could be divided into multiple spatial beams (clusters) and each preamble may be reused among multiple spatial clusters to accommodate even more access devices simultaneously [11–13].
In this work, we investigate the optimal backoff strategy for IoT devices in MIMO-based GF-NOMA systems within the mURLLC paradigm, applicable to scenarios such as intelligent transportation, autonomous driving, and smart factories. The proposed strategy not only effectively meets the low latency requirements of URLLC but also reduces the probability of interference between users. Additionally, it can improve the system resource allocation efficiency, thereby enhancing the overall spectrum resource utilization. With GF-NOMA, each IoT device needs to select its access parameters in a distributed manner, which will cause severe system interference and network access congestion when the number of active devices is large. Conventional ALOHA-like multiple access schemes have the devices to select a backoff time based on a random factor [14,15], which might be efficient for semi-static IoT services but far from optimal under the highly dynamic environment and the stringent delay constraint of mURLLC. Theoretically, when a large number of devices compete for limited communication resources with distributed decision-making subject to highly dynamic system states, this problem can be formulated as a DSG, and the optimal solution can be derived by solving multiple correlated stochastic differential equations (SDEs). When the amount of devices is large, it becomes prohibitively difficult to solve these SDEs simultaneously. In this work, we propose to employ mean field game (MFG) theory to solve the dynamic stochastic game (DSG) of massive IoT devices in their GF SCMA processes to minimize their average backoff delay under a limited energy budget. To the best of our knowledge, this is the first work that adopts MFG theory to dynamically optimize the backoff strategy for multi-beam MIMO based on GF-NOMA. The contributions of this study can be summarized as follows:
• A two-step GF random access scheme is proposed for MIMO BF-based cells, in which SCMA is adopted for multiple IoT devices within the same antenna beam, and ZF is employed to eliminate inter-beam interference in the uplink.
• We formulate a backoff delay minimization problem in GF-NOMA for mURLLC services as a multiuser non-cooperative DSG, subject to the dynamic channels, energy states, and interference among NOMA devices. In this DSG, the objective of each device is to seek the optimal dynamic backoff strategy within energy constraints to minimize the long-term backoff delay costs.
• We adopt the MFG to simplify the complex interplay between device backoff strategies. In order to obtain the optimal backoff scheme, we derive the Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck Kolmogorov (FPK) equations, which are relevant to achieve the mean-field equilibrium (MFE). By solving these two coupled equation pairs iteratively with the finite difference method (FDM), we obtain the optimal backoff strategy and the evolution of the system states.
• We numerically evaluate the performance of the proposed Mean Field-based Dynamic Backoff (MFDB) scheme in comparison with conventional GF schemes based on access class barring (ACB) and slotted-Additive Links On-line Hawaii Area (ALOHA). Numerical results show that the proposed scheme can minimize the backoff delay cost and maintain a nearly constant backoff delay when the number of devices increases rapidly.
The rest of this paper is organized as follows. The related work and contributions are introduced in Section 2. The system model is presented in Section 3, and the problem formulation is described in Section 4. The MFG approach and the corresponding Dynamic Backoff Algorithm are proposed in Section 5. Section 6 numerically evaluates the performance of our proposal and other contemporary random access schemes. Finally, Section 7 concludes the paper.
Combining GF-NOMA and beam-space MIMO can increase system capacity, improve spectral efficiency and reduce access delay, making it a promising solution for wireless communication systems. However, adopting NOMA can lead to severe co-channel interference, especially in ultra-dense IoT scenarios, where interference analysis and resource allocation become challenges. To address the above issues, the authors in [16] proposed a Random Access NOMA (RA-NOMA) transmission protocol for IoT networks that employs a timer and power backoff strategy. However, this method significantly increases energy consumption. This poses a substantial negative impact on devices that require long-term operation and rely on battery power, thereby limiting the effectiveness and feasibility of this method in practical applications. The authors in [17] proposed a detailed offloading protocol for the GF-SCMA enhanced MEC scheme. However, relying solely on SCMA codebooks to differentiate users in the event of resource access conflicts is insufficient, as it results in significant resource consumption for codebooks, especially with a large number of devices. In [18], the authors proposed an optimization method to maximize the service quality of SCMA grant-free access with multipacket reception (MPR). In the event of a collision, the user skips the current frame with the probability of collision, and the colliding and queuing users continue to wait for the next transmission in a random time slot in another frame according to the random escape strategy. However, the random waiting time for each user after a collision is not the optimal choice for the system, potentially causing the user equipment to wait during unnecessary periods and increasing overall delay. The above MIMO-NOMA studies only consider a limited number of devices within the cell, primarily because an increase in the number of devices will lead to increased interference and the complexity of resource allocation. Besides, no works have optimized the backoff delay of a Massive SCMA-based GF-NOMA system, considering the dynamic change for system states under the limited device energy budget. To the best of our knowledge, this is the first work to propose a dynamic backoff scheme for SCMA-based GF-NOMA with practical MIMO settings.
For interference management and resource allocation in ultra-dense IoT systems, game theory can be employed to analyze the cooperation and competition among rational devices while developing strategies to maximize their payoff [19]. In the existing resource allocation schemes based on the game theory, the authors of [20] proposed a power allocation framework based on cognitive radio NOMA which optimized the utility function of each device and proved the existence of Nash equilibrium. The authors of [21] have proposed a Nash Bargaining Solution-based (NBS) game to achieve the optimal power allocation scheme based on channel conditions in a MIMO-NOMA system while ensuring both allocation fairness and maximum transmission rate. According to these papers, when multiple devices compete for limited communication resources in a distributed game, the dynamic optimization problem can be transformed into a DSG. However, as described by the authors in [22], the device’s DSG process in the ultra-dense IoT scenario will generate many SDEs, resulting in the dimensional explosion problem. To overcome the issues mentioned above, the authors of [23] proposed the MFG to transform the one-to-one interaction between devices into a more tractable interaction between the device and the mean field.
MFG is created to describe the collective behavior of a large number of interacting individuals in a system [23]. It handles the interactions in complex systems by simplifying and approximating them, and simplifies the influence of individuals on other individuals into an average effect, which helps to understand and analyze the macroscopic behavior of the system. Therefore, MFG has been widely used in optimizing the performance of large scale communication systems, which involves energy efficiency [24], transmission rate [25], and transmission power [26]. The application of MFG to the NOMA system can transform massive devices into a continuum and simulate their state distributions, thereby simplifying the complex interference into the mean field interference, which is easier to analyze. In related studies, the authors of [27] proposed a NOMA-based resource allocation scheme for ultra-dense mobile edge computing (MEC) systems. To address this problem, the authors divided it into two subproblems, device clustering and power allocation. They clustered the devices based on the channel gain and proposed a resource allocation algorithm using the mean-field framework. The authors of [28] addressed the power control problem in Massive Machine Type Communication (mMTC) systems. When performing successive interference cancellation (SIC) at the receiving end, the interference is estimated by converting the location-based interference into a more manageable mean-field interference. However, SIC requires strict power ordering, and the complexity of interference estimation is greatly increased when multiple system states are considered simultaneously. Different from the previous mean-field-based power allocation schemes, in this paper, we investigate the massive GF-NOMA problem in a dynamic radio environment for the 6G IoT scenario. Our approach focuses on dynamic changes in device energy and channel state with a limited energy budget based on MFG and SCMA to minimize the backoff delay.
As shown in Fig. 1, we consider a 6G single-cell system in which a BS equips with L antennas in the cell center, and N
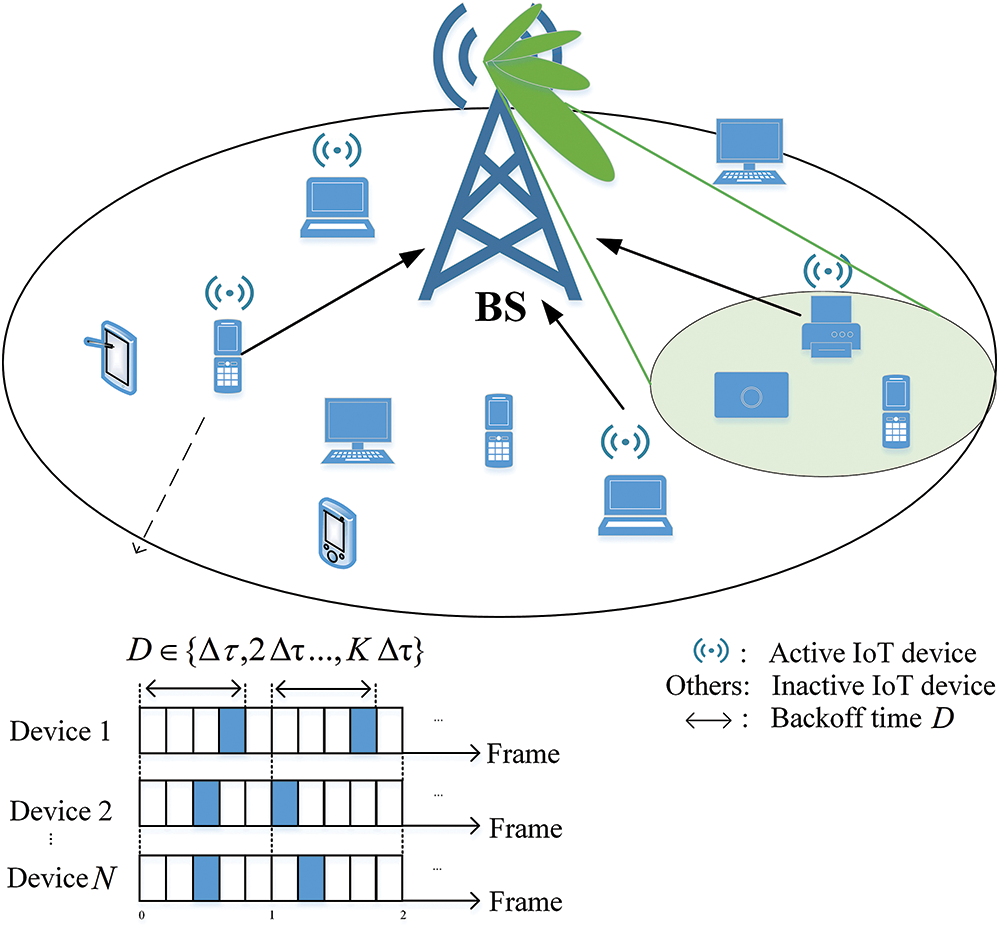
Figure 1: System model
The GFRA procedure is illustrated in Fig. 2, which can be divided into two main stages: broadcasting and data transmission.

Figure 2: Illustration of grant free random access procedure
Stage I—Broadcasting: Broadcasting: Before the beginning of each uplink transmission session within time [0, T], the BS will broadcast the pre-derived optimal MFDB policy set [33] and the statistic channel variation models all the IoT devices in this cell, as well as the available frequency resources, the trained path loss model, preamble configuration information, and reference signals. The preamble configuration information, in particular, details the format that devices must follow to generate SCMA preambles. Upon receiving these broadcast messages, each device performs channel estimation, selects an access beam based on the strength of the reference signals, and a SCMA preamble. Besides, it will predict the channel variations in the next T time duration based on the statistic channel variation models from the BS.
Stage II—Data transmission: The device can derive the channel state of each frame according to the initial channel state and the predicted channel evolution model. Before data transmission, each device selects its optimal backoff delay using our proposed MFDB scheme (the optimal policy set has been derived by the BS), according to its predicted channel states and remaining energy level. Following this backoff period, the device generates the preamble based on the configuration information received during the broadcast stage and appends it to the header of the upload packet. The detailed workings of the MFDB scheme are elaborated in Sections 1–4.
In this work, the uplink channel gain of each IoT devices is modeled with two components, namely the path-loss and the fading component. Assuming that the devices move slowly relative to the investigated transmission period, the path-loss
where a is the path loss coefficient, and
where
Considering the limited battery capacity of IoT devices, the energy budget of each device within duration T is assumed as
in which
With beamforming, the signal received at the BS can be expressed as:
where
A MPA decoder is assumed to be employed at the BS for SCMA decoding, which allows parallel decoding for different uplink signals from each device with different SCMA patterns in the same resource block (RB) [9]. Therefore, for a specific device signal, the SCMA signals of other devices in the same beam and RB can be treated as interference. When device n selecting backoff delay
in which
It should be noted that, a low received signal to interference plus noise ratio (SINR) will lead to compromised decoding quality and diminished precoding effectiveness for the adopted ZF receiver, which in turn results in interference among devices distributed across different beams. Therefore, each device needs to ensure that SINR of its received signal at the BS is greater than the pre-defined SINR threshold
For the convenience of writing, we assume that
in which,
The interference
By inverting (5), the minimum required power
To minimize the energy consumption while maintaining a transmission quality constraint, we select
In the investigated scenario, each device n needs to select its optimal backoff delay
To facilitate the optimization process,
in which
where
is the state of device n at time t, composed of the remaining energy
Definition 1: The optimal backoff strategy
where
Based on [38] the sufficient condition for the existence of the NE is that the running cost function
Proof: See Appendix A.
To obtain the optimal control strategy
Proof: See Appendix B.
According to the proof in Appendix B, the Hamiltonian is smooth, which implies the existence of the Nash equilibrium [39]. However, it must be noted that in Eq. (18), the interference term
In this section, MFG [40] is introduced to convert the n-player non-cooperative game into the interaction between only two bodies, namely the generic device and the mean field, such that the problem can be solved no matter how large is n. Then the MFE is derived with both HJB and FPK equations, and the corresponding Mean Field-based Dynamic Backoff (MFDB) algorithm is proposed.
5.1 Problem Reformulation with Mean Field Theory
According to the mean field theory [23], a MFG model consists of a generic player who takes rational actions and a mean field representing the collective actions of all other players. When the game starts, the generic player devises a decision set for all possible states to optimize their cost, which is shared among all players. Subsequently, the mean field, using its probability density function (PDF), calculates the cumulative impact of all other players on the generic player based on this shared decision set. In response, the generic player adjusts their decisions based on the mean field’s feedback. The mean field then updates its impacts reflecting the new decision set. This iterative process continues until a NE is achieved. It is obvious that in a MFG, which functions as a two-body game, the convergence time does not increase with the number of players.
In a MFG framework [23], the model features a typical agent who follows rational decision-making, and a mean field that aggregate the behavior of all other agents who are also rational. As the game commences, this typical agent formulates a strategy for all conceivable states to minimize its associated cost, which is uniformly adopted by all the agents in the game. Then the PDF of the mean field can be employed to calculate the collective effect of all the typical agents, leveraging the common strategic framework. In reaction to the impact of the mean field, the typical agent fine-tunes its strategy accordingly. The mean field, in turn, updates its effects to reflect the revised strategy. This dynamic interaction will continuous until a NE is reached. It is obvious that the convergence time of a MFG, which essentially operates as a two-agent interaction, remains stable regardless of the number of agents.
To formulate a MFG, four hypotheses need to be satisfied:
• H1—A continuum of a large number of players: Assuming a sufficiently large number of IoT devices participating in the game, such that it can be approximated as infinite. Since the number of clusters is limited and far smaller than the number of devices, the number of devices in each cluster can also be considered infinite so that the devices can be regarded as the player continuum.
• H2—The player’s rational behaviors: It is assumed that the devices involved in the game have rational behavior. The devices will all implement the optimal backoff delay at any given time, and it will depend exclusively on the current state
• H3—The interchangeability of the players: Since the optimal backoff strategy of each device only depends on its state and the interference of other devices. Therefore, changing the order of devices does not change their backoff decision. Devices in the same state will have the same backoff delay. Based on this assumption, we can decide the backoff delay based on the state of the device rather than n separate strategies.
• H4—The mean field can describe the interaction between players: For a single device n, instead of considering the one-to-one interaction, we only consider the jointly affected by
Given the investigated system satisfies H1–H4, the DSG problem (12) can be transformed to a MFG as follows:
Definition 2: For the state space
in which
in which
They also satisfy the following conditions:
in which
Due to the fixed device density
where
The complete proof is presented in Appendix C.
Then, the interference term can be converted from (27) to:
When
From (28) and (29), it can be seen that devices transmitting with the same backoff delay will approximately suffer the same cumulative interference as the number of devices tends to infinity. Therefore, we can ignore the device index n and establish the relationship between backoff delay and interference:
5.2 Mean Field-Based Dynamic Backoff Scheme
To this end, the N-body problem in (12) can be converted to an equivalent MFG, viewed as a two-body problem, as illustrated in Fig. 3. Then we explain how the optimal control
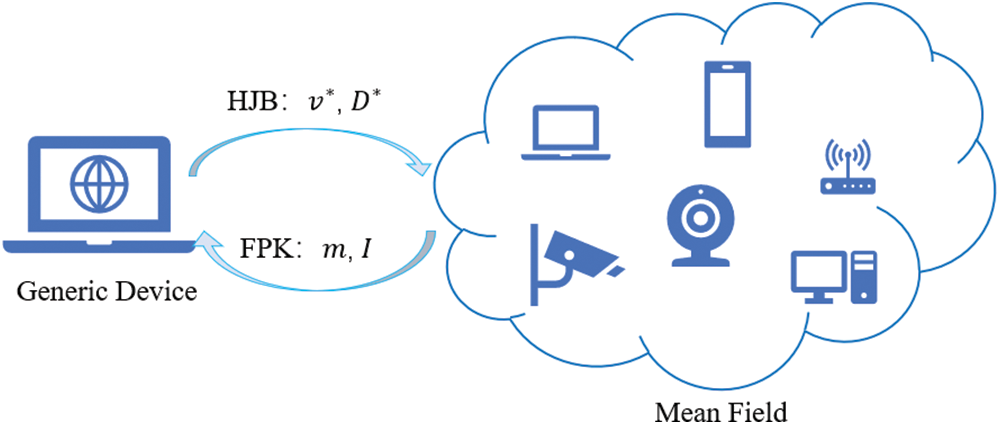
Figure 3: Graphical explanation of applying two body MFG to N-body computational backup decisions
First body—Generic Device: According to the HJB equation, each device can decide its optimal backoff delay based on its state. The general HJB equation is expressed as (26) at the bottom of the page, and the index n in (18) can be removed, leading to the optimal backoff policy for a generic device as follows:
Second body—Mean Field: The cumulated interference to a generic device is now sufficiently described by (30), in which the evolution of the mean field PDF can be derived as [23]:
Proof: See Appendix D.
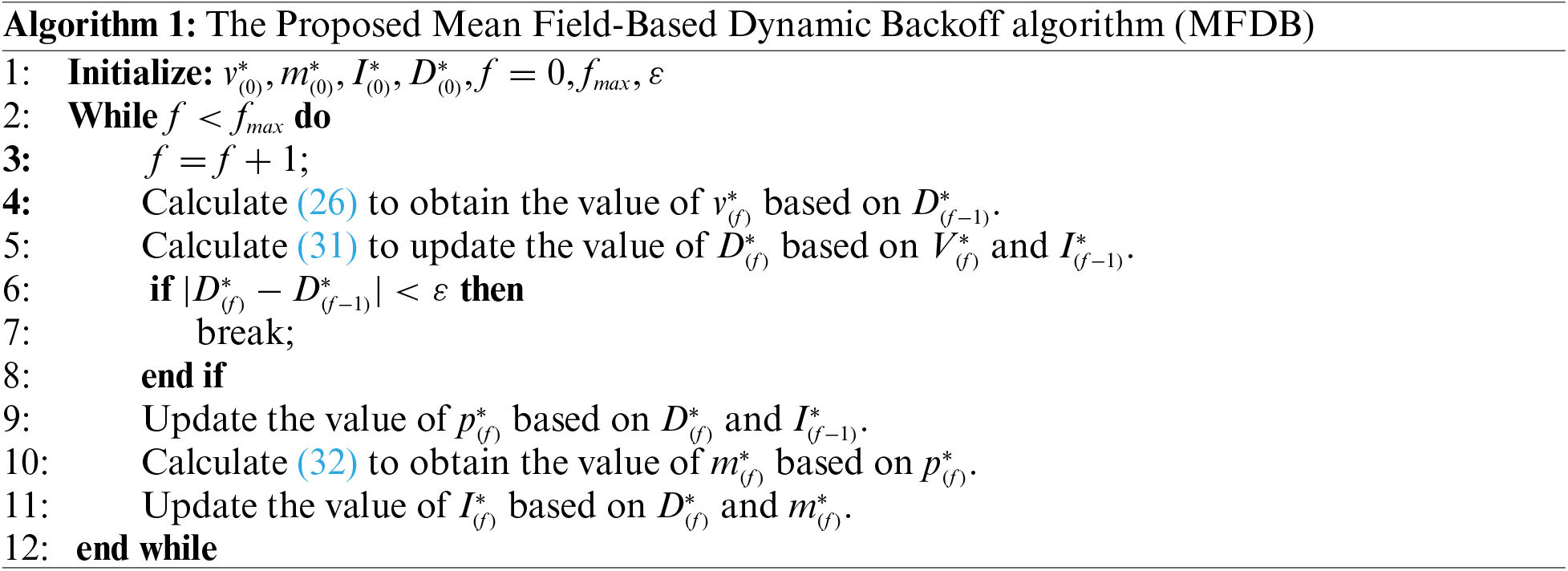
As presented in Fig. 3, the HJB Eq. (26) is employed to derive the optimal backoff strategy (31) to be used for any device in any states (channel state, remaining energy) under the initial mean field interference (from any initial mean field PDF), while the FPK Eq. (32) allows to calculate the mean field interference (30) given all devices in the system follow the optimal backoff strategies from HJB since they are all rational. After that, the HJB will recalculate the optimal control solution according to the updated mean field interference, then the FPK will derive the new mean field evolution based on the updated backoff control. This interactive process will be repeated until the optimal control or its corresponding value function converge, as shown in Algorithm 1.
In the MFG, when the individual strategies (their optimal policy in (31)) and the mean field reach a stable state, where no device can increase its value by unilaterally changing their strategy, the system reaches a Mean Field Equilibrium (MFE), which can be seen as the equivalent to the Nash equilibrium for the n-player DSG in (16) before MFG is employed. At this point, each device’s strategy is the best response to the strategies of all others. In our system, at any time t and state X, the value function
The computational complexity of the n-player DSG in Section 4 and the proposed MFG-based Algorithm 1 are compared as follows:
• N-player DSG: In the model, each device is required to account for both its own action and the actions of all other devices, by solving (16)–(18) for N devices at the same time. This integration leads to a significant increase in action space and computational complexity as the number of devices N grows, e.g., if the action space of each device is A-dimensional, then the total action space of the system becomes
• MFG: The MFG simplifies the interactions between N devices by transforming the complex multi-player game into a two-player game, where each individual interacts with the average behavior of all the others. In other words, the mean field simplifies the complex interactions of a large number of participants into interactions between individuals and the mean field. This method introduces the mean field approximation, which transforms the high-dimensional game problem of n devices into a game between an individual and the mean field of the overall system. This approach substantially reduces the complexity by limiting the system action space to
In this section, we employ the FDM to solve the proposed MFDB scheme numerically, as described in Algorithm 1. Since ZF precoding eliminates the inter-beam interference, all of the following numerical results are for the device in one spatial beam, and the devices in other beams follow the same strategy. To maintain generality and ensure consistency, the system states E can be normalized to the interval [0, 1]. Table 1 presents the key simulation parameters employed in our work.

We assume a semi-static channel with constant channel gain during the simulations in Figs. 4 and 5. Fig. 4 describes the optimal backoff decisions

Figure 4: The optimal backoff delay D under the constant channel

Figure 5: Mean field evolution under a constant channel gain
As in Eq. (7), the dynamic channel evolution is modeled as a stochastic differential equation with the uncertainty coefficient

Figure 6: The optimal backoff delay D under different stochastic channels for a generic device (a) Predicted channel evolution; (b) Optimal backoff delay
• h1: The certain channel with
• h2: The low unpredictable channel with
• h3: The medium unpredictable channel with
• h4: The high unpredictable channel with
All the above channel scenarios have the same deterministic part, i.e.,
where
6.3 Comparison with Other Backoff Schemes
In this subsection, we compare the performance of the MFDB scheme with other backoff schemes, which are:
• ACB: The BS generates an ACB factor
• Slotted-ALOHA: The device randomly selects a backoff delay in each frame to transmit data with a fixed transmission power using SCMA. The base station determines whether the decoding is successful according to the received SINR and sends a feedback signal with ACK or NACK. If the decoding fails, the device will randomly backoff for 1 to 3 TSs and retransmit the data.
• Minimum backoff (MB): In this baseline scheme, the device will always transmit SCMA data in each frame’s first TS. The interference is determined by all device power and channel state, which is pre-counted by the BS and broadcast to all devices in each frame [28]. The device decides the transmission power based on the interference level.
To evaluate the backoff delay of the above scheme, we consider the following channel scenarios:
• Constant channel (CC): The channel gain is consistently
• Dynamic channel (DC): According to (7), the DC is modeled as two parts, where the deterministic part follows (36) with different parameter
The normalized energy budget

Figure 7: The backoff delay D under different backoff scheme for a generic device. (a) Under CC; (b) Under DC
Moreover, it can be seen from the figure that the MFDB significantly outperforms the ACB and the slotted-ALOHA scheme in terms of backoff delay. That is because the MFDB scheme can dynamically adjust the backoff in each frame according to its current channel gain and remaining energy. Thus, the MFDB scheme can avoid the case that a large number of devices access the same TS resulting in high decoding failure probability at the BS and extra delay due to data re-transmissions.
Fig. 8 depicts the cumulated delay cost (CDC) for the four evaluated strategies. According to (11),

Figure 8: The CDC under different backoff scheme for a generic device (a) Under CC; (b) Under DC
Fig. 9 illustrates the average backoff delay vs. the number of devices in the beam with different backoff strategies under different channel conditions. It can be observed that no matter what channel condition, the device with MFDB strategy always maintains the lowest backoff delay, which has little growth trend and is almost independent of the number of devices. When the number of devices is less than 900, the backoff delay of ACB and slotted-ALOHA tends to be stable, and the backoff delay of ACB is slightly higher than that of slotted-ALOHA. This is because the average number of transmitting devices per slot in this case is less than the threshold for the number of devices that can be successfully decoded. Moreover, the random factor judgment of the ACB strategy will increase the backoff delay. When the number of devices is between 900 and 1300, the backoff delay of slotted-ALOHA rapidly exceeds that of ACB. This is due to the increased probability of decoding failure in this case, and the random factor judgment of ACB can adjust the number of access devices to reduce the probability of decoding failure. When the number of devices exceeds 1300, in this case, the random factor of ACB also fails to alleviate the decoding failure but increases the backoff delay.

Figure 9: The average backoff delay vs. device number under different channel condition. (a) Under CC; (b) Under DC
In this work, we investigate the optimal dynamic backoff mechanism for massive random access within a 6G ultra-dense IoT system. Considering a 6G cell employing GF-NOMA and multi-beam MIMO, we design a clustering scheme based on GoB and an access signaling process based on GFRA. A MFDB scheme is proposed for each cluster to minimize the long-term cost of backoff delay of a generic device. Numerical results validate that the proposed MFDB can proactively adjust the backoff delay and transmission power according to the predicted channel gain and energy level evolution subject to the specified energy constraints. Compared with three other GFRA schemes, namely ACB, slotted-ALOHA, and MB, the proposed MFDB mechanism can significantly reduce the average access delay and maintain a nearly constant backoff delay level even as the number of active devices achieves 2000 in a single subcarrier per cell.
In future work, we intend to setup real-world experiment environment to implement the proposed MFDB scheme and to evaluate its validity. Meanwhile, we would also add other evaluation indicators such as energy efficiency to evaluate the performance of our proposed method. After that, the proposed MFG approach needs to be extended to multi-cell and multi-channel cellular systems with combined backoff delay, frequency resource, and NOMA preamble selections.
Acknowledgement: This work was supported by the National Natural Science Foundation of China.
Funding Statement: This work was supported by the National Natural Science Foundation of China under Grant 62371036, supported authors Haibo Wang, Hongwei Gao and Pai Jiang. Website: https://www.nsfc.gov.cn/english/site_1/index.html (accessed on 25 July 2024).
Author Contributions: Haibo Wang provided the problem formulation, proposed the idea of Mean-field Game-based backoff scheme, and revise the JIOT manuscript for many times; Hongwei Gao contributed the major writing of the journal paper, and most of the math derivation and simulations. Pai Jiang wrote the related conference paper, and made the basic simulation for the conference paper. During the writing and submission of the JIOT paper, she had graduated from her master study and cannot make further contribution to the journal paper. Matthieu De Mari co-supervised both Pai Jiang and Hongwei Gao in deriving the MFG solutions. Panzer Gu gave guidance on how to adopt the MFG backoff strategy in the MIMO-enabled cellular IoT systems, and how to design the grant-free access procedure. Yinsheng Liu gave guidance on how to design the MIMO channel model and express it in partial differential equations. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the corresponding author, Hongwei Gao, upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. P. Jiang, H. Wang, and M. De Mari, “Optimal dynamic backoff for grant-free NOMA IoT networks: A mean field game approach,” in 2022 IEEE/CIC Int. Conf. Commun. China (ICCC), Sanshui, Foshan, China, 2022, pp. 997–1002. [Google Scholar]
2. M. Dohler and S. J. Johnson, “Massive non-orthogonal multiple access for cellular IoT: Potentials and limitations,” IEEE Commun. Mag., vol. 55, no. 9, pp. 55–61, Sep. 2017. doi: 10.1109/MCOM.2017.1600618. [Google Scholar] [CrossRef]
3. Y. Liu, Y. Deng, M. Elkashlan, A. Nallanathan, and G. K. Karagiannidis, “Optimization of grant-free NOMA with multiple configured-grants for mURLLC,” IEEE J. Sel. Areas Commun., vol. 40, no. 4, pp. 1222–1236, Apr. 2022. doi: 10.1109/JSAC.2022.3143264. [Google Scholar] [CrossRef]
4. J. Choi, J. Ding, N. -P. Le, and Z. Ding, “Grant-free random access in machine-type communication: approaches and challenges,” IEEE Wirel. Commun., vol. 29, no. 1, pp. 151–158, Feb. 2022. doi: 10.1109/MWC.121.2100135. [Google Scholar] [CrossRef]
5. J. Zhang, X. Tao, H. Wu, N. Zhang, and X. Zhang, “Deep reinforcement learning for throughput improvement of the uplink grant-free NOMA system,” IEEE Internet Things J., vol. 7, no. 7, pp. 6369–6379, Jul. 2020. doi: 10.1109/JIOT.2020.2972274. [Google Scholar] [CrossRef]
6. M. Fayaz, W. Yi, Y. Liu, and A. Nallanathan, “Transmit power pool design for grant-free NOMA-IoT networks via deep reinforcement learning,” IEEE Trans. Wirel. Commun., vol. 20, no. 11, pp. 7626–7641, Nov. 2021. doi: 10.1109/TWC.2021.3086762. [Google Scholar] [CrossRef]
7. J. Liu, G. Wu, X. Zhang, S. Fang, and S. Li, “Modeling, analysis, and optimization of grant-free NOMA in massive MTC via stochastic geometry,” IEEE Internet Things J., vol. 8, no. 6, pp. 4389–4402, Mar. 15, 2021. doi: 10.1109/JIOT.2020.3027158. [Google Scholar] [CrossRef]
8. B. Wang, K. Wang, Z. Lu, T. Xie, and J. Quan, “Comparison study of non-orthogonal multiple access schemes for 5G,” in 2015 IEEE Int. Symp. Broadb. Multimed. Syst. Broadcast., Ghent, Belgium, 2015, pp. 1–5. [Google Scholar]
9. W. Yuan, N. Wu, Q. Guo, Y. Li, C. Xing and J. Kuang, “Iterative receivers for downlink MIMO-SCMA: Message passing and distributed cooperative detection,” IEEE Trans. Wirel. Commun., vol. 17, no. 5, pp. 3444–3458, May 2018. doi: 10.1109/TWC.2018.2813378. [Google Scholar] [CrossRef]
10. A. Almradi, P. Xiao, and K. A. Hamdi, “Hop-by-Hop ZF beamforming for MIMO full-duplex relaying with co-channel interference,” IEEE Trans. Commun., vol. 66, no. 12, pp. 6135–6149, Dec. 2018. doi: 10.1109/TCOMM.2018.2863723. [Google Scholar] [CrossRef]
11. W. A. Al-Hussaibi and F. H. Ali, “Efficient user clustering, receive antenna selection, and power allocation algorithms for massive MIMO-NOMA systems,” IEEE Access, vol. 7, pp. 31865–31882, 2019. [Google Scholar]
12. S. Gong, C. Xing, V. K. N. Lau, S. Chen, and L. Hanzo, “Majorization-minimization aided hybrid transceivers for MIMO interference channels,” IEEE Trans. Signal Process., vol. 68, pp. 4903–4918, 2020. [Google Scholar]
13. X. Ge, W. Shen, C. Xing, L. Zhao, and J. An, “Training beam design for channel estimation in hybrid mmWave MIMO systems,” IEEE Trans. Wirel. Commun., vol. 21, no. 9, pp. 7121–7134, Sep. 2022. doi: 10.1109/TWC.2022.3155157. [Google Scholar] [CrossRef]
14. S. Duan, V. Shah-Mansouri, Z. Wang, and V. W. S. Wong, “D-ACB: Adaptive congestion control algorithm for bursty M2M traffic in LTE networks,” IEEE Trans. Veh. Technol., vol. 65, no. 12, pp. 9847–9861, Dec. 2016. doi: 10.1109/TVT.2016.2527601. [Google Scholar] [CrossRef]
15. T. Tao, F. Han, and Y. Liu, “Enhanced LBT algorithm for LTE-LAA in unlicensed band,” in 2015 IEEE 26th Annu. Int. Symp. Per., Indoor, Mob. Radio Commun. (PIMRC), 2015, pp. 1907–1911. [Google Scholar]
16. M. R. Amini, A. Al-Habashna, G. Wainer, and G. Boudreau, “Performance analysis of random access NOMA for critical mIoT with timer-power back-off strategy,” IEEE Trans. Veh. Technol., vol. 72, no. 8, pp. 10754–10769, Aug. 2023. doi: 10.1109/TVT.2023.3257107. [Google Scholar] [CrossRef]
17. P. Liu, K. An, J. Lei, Y. Sun, W. Liu and S. Chatzinotas, “Grant-free SCMA enhanced mobile edge computing: Protocol design and performance analysis,” IEEE Internet Things J., vol. 11, no. 15, pp. 25895–25909, 2024. doi: 10.1109/JIOT.2024.3386593. [Google Scholar] [CrossRef]
18. L. Wang, J. Xu, T. Qi, X. Jiang, J. Cui and B. Zheng, “An optimization method to maximize the service quality of SCMA grant-free access with MPR,” in 2021 13th Int. Conf. Wirel. Commun. Signal Process. (WCSP), Changsha, China, 2021, pp. 1–5. doi: 10.1109/WCSP52459.2021.9613275. [Google Scholar] [CrossRef]
19. M. J. Osborne, An Introduction to Game Theory. New York: Oxford University Press, 2004. [Google Scholar]
20. S. S. Abidrabbu and H. Arslan, “Energy-efficient resource allocation for 5G cognitive radio NOMA using game theory,” in 2021 IEEE Wirel. Commun. Netw. Conf. (WCNC), 2021, pp. 1–5. [Google Scholar]
21. M. Fadhil, A. H. Kelechi, R. Nordin, N. F. Abdullah, and M. Ismail, “Game theory-based power allocation strategy for NOMA in 5G cooperative beamforming,” Wirel. Pers. Commun., vol. 122, no. 2, pp. 1101–1128, 2022. doi: 10.1007/s11277-021-08941-y. [Google Scholar] [CrossRef]
22. R. Zheng, H. Wang, M. De Mari, M. Cui, X. Chu and T. Q. S. Quek, “Dynamic computation offloading in ultra-dense networks based on mean field games,” IEEE Trans. Wirel. Commun., vol. 20, no. 10, pp. 6551–6565, Oct. 2021. doi: 10.1109/TWC.2021.3075028. [Google Scholar] [CrossRef]
23. J. M. Lasry and P. L. Lions, “Mean field games,” Jpn. J. Math., vol. 2, no. 1, pp. 229–260, Mar. 2007. doi: 10.1007/s11537-007-0657-8. [Google Scholar] [CrossRef]
24. H. Gao et al., “Energy-efficient velocity control for massive numbers of UAVs: A mean field game approach,” IEEE Trans. Veh. Technol., vol. 71, no. 6, pp. 6266–6278, Jun. 2022. doi: 10.1109/TVT.2022.3158896. [Google Scholar] [CrossRef]
25. T. Li et al., “A mean field game-theoretic cross-layer optimization for multi-hop swarm UAV communications,” J. Commun. Netw., vol. 24, no. 1, pp. 68–82, Feb. 2022. doi: 10.23919/JCN.2021.000035. [Google Scholar] [CrossRef]
26. M. De Mari, E. Calvanese Strinati, M. Debbah, and T. Q. S. Quek, “Joint stochastic geometry and mean field game optimization for energy-efficient proactive scheduling in ultra dense networks,” IEEE Trans. Cogn. Commun. Netw., vol. 3, no. 4, pp. 766–781, Dec. 2017. doi: 10.1109/TCCN.2017.2761381. [Google Scholar] [CrossRef]
27. A. Benamor, O. Habachi, I. Kammoun, and J. -P. Cances, “Mean field game-theoretic framework for distributed power control in hybrid NOMA,” IEEE Trans. Wirel. Commun., vol. 21, no. 12, pp. 10502–10514, Dec. 2022. doi: 10.1109/TWC.2022.3184623. [Google Scholar] [CrossRef]
28. L. Li et al., “Resource allocation for NOMA-MEC systems in ultra-dense networks: A learning aided mean-field game approach,” IEEE Trans. Wirel. Commun., vol. 20, no. 3, pp. 1487–1500, Mar. 2021. doi: 10.1109/TWC.2020.3033843. [Google Scholar] [CrossRef]
29. R. S. Ganesan, W. Zirwas, B. Panzner, K. I. Pedersen, and K. Valkealahti, “Integrating 3D channel model and grid of beams for 5G mMIMO system level simulations,” in 2016 IEEE 84th Veh. Technol. Conf. (VTC-Fall), 2016, pp. 1–6. [Google Scholar]
30. B. Wang, L. Dai, Z. Wang, N. Ge, and S. Zhou, “Spectrum and energy-efficient beamspace MIMO-NOMA for millimeter-wave communications using lens antenna array,” IEEE J. Sel. Areas Commun., vol. 35, no. 10, pp. 2370–2382, Oct. 2017. doi: 10.1109/JSAC.2017.2725878. [Google Scholar] [CrossRef]
31. 3GPP TS 36.211 V15.5.0, “Evolved universal terrestrial radio access (E-UTRAPhysical channels and modulation (Release 15),” Mar. 2019. Accessed: Jul. 25, 2024. [Online]. Available: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2425 [Google Scholar]
32. H. Chen, Y. Gu, and S. -C. Liew, “Age-of-information dependent random access for massive IoT networks,” in IEEE INFOCOM 2020—IEEE Conf. Comput. Commun. Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 2020, pp. 930–935. [Google Scholar]
33. H. Khan, M. M. Butt, S. Samarakoon, P. Sehier, and M. Bennis, “Deep learning assisted CSI estimation for joint URLLC and eMBB resource allocation,” in 2020 IEEE Int. Conf. Commun. Workshops (ICC Workshops), Dublin, Ireland, 2020, pp. 1–6. [Google Scholar]
34. M. M. Olama, S. M. Djouadi, and C. D. Charalambous, “Stochastic power control for time-varying long-term fading wireless networks,” EURASIP J. Adv. Signal Process., vol. 2006, no. 1, 2006, Art. no. 089864. doi: 10.1155/ASP/2006/89864. [Google Scholar] [CrossRef]
35. F. Tang, Y. Zhou, and N. Kato, “Deep reinforcement learning for dynamic uplink/downlink resource allocation in high mobility 5G HetNet,” IEEE J. Sel. Areas Commun., vol. 38, no. 12, pp. 2773–2782, Dec. 2020. doi: 10.1109/JSAC.2020.3005495. [Google Scholar] [CrossRef]
36. S. Lasaulce and H. Tembine, Game Theory and Learning foR Wireless Networks: Fundamentals and Applications. Oxford, Waltham, MA: Academic Press, 2011. Accessed: Jul. 25, 2024. [Online]. Available: https://www.researchgate.net/publication/278768710_Game_Theory_and_Learning_for_Wireless_Networks_Fundamentals_and_Applications [Google Scholar]
37. R. Bellman, “Dynamic programming and stochastic control processes,” Inf. Control, vol. 1, no. 3, pp. 228–239, 1958. doi: 10.1016/S0019-9958(58)80003-0. [Google Scholar] [CrossRef]
38. Y. Jiang, Y. Hu, M. Bennis, F. Zheng, and X. You, “A mean field game-based distributed edge caching in fog radio access networks,” IEEE Trans. Commun., vol. 68, no. 3, pp. 1567–1580, Mar. 2020. doi: 10.1109/TCOMM.2019.2961081. [Google Scholar] [CrossRef]
39. T. Başar and G. J. Olsder, Dynamic Noncooperative Game Theory. Philadelphia, PA: Society for Industrial and Applied Mathematics, 1999. [Google Scholar]
40. X. Ge, H. Jia, Y. Zhong, Y. Xiao, Y. Li and B. Vucetic, “Energy efficient optimization of wireless-powered 5G full duplex cellular networks: A mean field game approach,” IEEE Trans. Green Commun. Netw., vol. 3, no. 2, pp. 455–467, Jun. 2019. doi: 10.1109/TGCN.2019.2904093. [Google Scholar] [CrossRef]
41. B. Blaszczyszyn, M. Jovanovic, and M. K. Karray, “Performance laws of large heterogeneous cellular networks,” in 2015 13th Int. Symp. Model. Optim. Mo., Ad Hoc, Wirel. Netw. (WiOpt), May 2015, pp. 597–604. [Google Scholar]
42. M. De Mari and T. Quek, “Energy-efficient proactive scheduling in ultra dense networks,” in 2017 IEEE Int. Conf. Commun. (ICC), Paris, 2017, pp. 1–6. [Google Scholar]
43. M. Burger and J. M. Schulte, Adjoint Methods for HamiltonJacobi-Bellman Equations. Munster, Germany: Universität Münster, 2010. [Google Scholar]
As
By performing Taylor’s expansion on
Then, by substituting (35) into (34), subtracting
Because of
From (40), the optimal backoff delay
For the first derivative of the Hamiltonian with respect to
Taking the derivative of the interference term, we can obtain:
In which
Therefore, the backoff delay can be derived as (18).
The interference in (8) can be transformed into:
in which
in which
where
Let’s suppose a smooth and compactly supported function
By taking the partial derivative of t on both sides of the equation and applying the chain rule of derivation, we can get:
When n tends to infinity, (45) converts to:
Applying integration by parts on (46), convert it to:
When assuming
Since
Since
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools