
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Advanced Guided Whale Optimization Algorithm for Feature Selection in BlazePose Action Recognition
1 Electronic and Electrical Engineering Department, University College London, London, WC1E7JE, England
2 Department of Communications and Electronics, Delta Higher Institute of Engineering and Technology, Mansoura, 35111, Egypt
* Corresponding Author: Motasem S. Alsawadi. Email:
(This article belongs to the Special Issue: Optimization Algorithm for Intelligent Computing Application)
Intelligent Automation & Soft Computing 2023, 37(3), 2767-2782. https://doi.org/10.32604/iasc.2023.039440
Received 30 January 2023; Accepted 24 May 2023; Issue published 11 September 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The BlazePose, which models human body skeletons as spatiotemporal graphs, has achieved fantastic performance in skeleton-based action identification. Skeleton extraction from photos for mobile devices has been made possible by the BlazePose system. A Spatial-Temporal Graph Convolutional Network (STGCN) can then forecast the actions. The Spatial-Temporal Graph Convolutional Network (STGCN) can be improved by simply replacing the skeleton input data with a different set of joints that provide more information about the activity of interest. On the other hand, existing approaches require the user to manually set the graph’s topology and then fix it across all input layers and samples. This research shows how to use the Statistical Fractal Search (SFS)-Guided whale optimization algorithm (GWOA). To get the best solution for the GWOA, we adopt the SFS diffusion algorithm, which uses the random walk with a Gaussian distribution method common to growing systems. Continuous values are transformed into binary to apply to the feature-selection problem in conjunction with the BlazePose skeletal topology and stochastic fractal search to construct a novel implementation of the BlazePose topology for action recognition. In our experiments, we employed the Kinetics and the NTU-RGB+D datasets. The achieved actiona accuracy in the X-View is 93.14% and in the X-Sub is 96.74%. In addition, the proposed model performs better in numerous statistical tests such as the Analysis of Variance (ANOVA), Wilcoxon signed-rank test, histogram, and times analysis.Keywords
BlazePose is an architecture for human posture prediction using a lightweight convolutional neural network optimized for real-time inference on mobile devices. During the inference process, the neural network generates 33 crucial body points for a single individual and runs at a rate of over30 frames per second on a Pixel 2 phone [1]. This is appropriate, particularly in real-time use cases such as measuring one’s fitness and recognizing one’s sign language. In various applications, such as health monitoring, sign language recognition, and gestural control, estimating the human body’s position from photographs or video is extremely important. This activity is challenging since there are many poses, degrees of freedom, and obstructions. In the most recent study [2], pose estimation has shown significant progress. The standard method generates heatmaps for every joint while simultaneously adjusting offsets for every position. Although this choice of heatmaps can be used by many people with only a little additional work required, it makes the model for a single individual significantly more complex than what is needed for real-time inference on mobile phones. A specific application scenario and demonstrate considerable speedups to the model with minimal to no loss in quality [3].
In contrast to methods based on heatmaps, regression-based approaches, despite being less computationally intensive and more scalable, attempt to forecast the mean coordinate values. Still, they frequently cannot resolve the ambiguity at the root of the problem. It has been demonstrated in [4] that the stacked hourglass architecture dramatically improves the prediction accuracy, even when using a reduced number of factors. Expanding on this idea, our previous work used an encoder-decoder network architecture to predict heatmaps for all joints, followed by an encoder that regresses straight to the coordinates of all joints.
We divided the review into two categories, the first for action recognition and the second for feature selection.
2.1 Convolutional Networks Action Recognition
Primitive methods for recognizing actions performed by a skeleton typically used artificially-created features and took advantage of relative 3D joint rotations and translations. Deep learning introduced new algorithms that can improve robustness and achieve previously unattainable levels of performance, ushering in a new era of innovation in activity recognition [5,6]. Such schemes depend on the skeleton data in numerous ways, including the following: Strategies utilizing RNNs.
Graph Neural Networks, in deep learning, the term “geometric deep learning” refers to all developing techniques that generalize deep learning models to non-Euclidean domains like graphs. The concept of a Graph Neural Network (GNN), was first described in [7]. The hunch that underpins GNNs is that the edges of a graph indicate the links between items or concepts, while the nodes represent the objects or concepts themselves. GNNs process the graph in an iterative manner, each time representing nodes as the outcome of applying a transformation on the features of nodes as well as the features of their neighbors. The author [8] is credited with the original formulation of CNNs on graphs. He adapted convolution to signals by employing a spectral construction in his work. After the success of convolutional neural networks, the idea of convolution was eventually modified such that it could be applied to graph data instead of the grid as shown in Fig. 1.

Figure 1: Action recognition process using convolutional neural network
Computer vision transformers First proposed in [9] as an alternative to recurrent networks, the Transformer has quickly become the dominant neural model for NLP. It was created to solve two major problems: the difficulty in processing very long sequences using LSTM and RNNs, and (ii) the difficulty in processing sentences using standard RNN architectures, typically done sequentially, word by word. The goal of its creation was to solve these problems. The transformer functions similarly to an encoder-decoder but wholly relies on multi-head self-attention. The transformer self-attention method has seen widespread use in recent years, finding applications in several well-established computer vision applications as shown in Fig. 2.

Figure 2: The Pose values detection by the neural network
2.2 Metaheuristics Algorithms for Feature Selection
Determining the best combination of characteristics is difficult and time-consuming to compute. Recently, metaheuristics have been helpful and dependable methods for tackling various optimization issues [10]. Some examples of these challenges include machine learning, data mining difficulties, engineering design, and feature selection. Metaheuristics offer superior performance compared to precise search methods since they do not have to look through the total search space. This frees them from this burden. These search algorithms are only partially functional [11,12]. However, exact approaches are comprehensive and ensure the discovery of the most effective solution to a problem, provided that sufficient time and memory are available. They are ineffective solutions for issues requiring a high level of computing complexity. Recently, scholars, particularly those working on hybrid metaheuristics, have shown significant interest in optimization. For example, the first proposed technique for feature selection utilizing a hybrid metaheuristic and used local search methods in conjunction with the Genetic Algorithm (GA) algorithm. In the research that has been done on Particle Swarm Optimization (PSO) for continuous search space problems, it has been combined with several different metaheuristics. For instance, the PSOGA algorithm was proposed in [13]. This algorithm combines PSO with GA. Other comparable works include a PSO combined with Differential Evolution (DE) (PSODE; referenced in [14]), a hybrid PSO, and Gravitational Search Algorithm (GSA) [15].
In addition, the PSO algorithm was hybridized with the Bacterial Foraging Optimization method to improve the power system’s stability [16]. These hybrid strategies try to share the strengths of both of their components to increase the capability of exploitation while simultaneously minimizing the likelihood of falling into an optimal local state. In a similar vein, GWO has received a great deal of attention on the subject of hybrid metaheuristics. For example, the authors in [17] and [18] have combined GWO and DE to test scheduling and continuous optimization. The authors of [19] combined GWO and GA to reduce the value of potential energy functions.
The authors’ goal in [20] was to improve the performance of complex systems, where they proposed a hybridization of GWO with Artificial Bee Colony (ABC). GWOSCA, presented in [21] and combines GWO and the Sine Cosine Algorithm, is yet another hybrid technique (SCA). According to this research’s findings, the hybrid approaches’ performance was significantly superior to that of other global or local search methods. On the subject of feature selection, metaheuristics have also gained a lot of traction in recent years. For example, in [22], a hybrid filter feature selection approach has been proposed. This approach combines SA and GA to improve the searchability of GA. The performance of this approach was tested on eight datasets obtained from UCI, and it received satisfactory results, taking into account the attributes chosen. GA and SA were hybridized in another investigation, and the resulting strain was evaluated based on its ability to hand-print Farsi characters [23]. In addition, a hybrid PSO that utilizes an innovative local search approach founded on information correlation was suggested in [24]. A hybrid genetic algorithm with particle swarm optimization called GPSO was used to pick wrapper features using SVM as a classifier for microarray data [25]. The authors presented a hybrid mutation operator for an enhanced multi-objective PSO [26], published in the same journal as unreliable data. It was proposed in [27] that a hybrid GA with PSO may be used to improve the feature set of digital mammogram datasets. Two hybrids, one utilizing ACO and the other using GA to select features, were proposed in [28] and [29].
Another somewhat similar method can be found in reference [30]. As a feature selector, the authors of [31] utilized a combination of DE and ABC. The authors in [32] proposed a hybrid harmony search method that combines a local stochastic search with their original search for the same objective. Recently, in [33], a hybrid WOA and SA were proposed to select wrapper features. In addition, in [34], there was a proposal for feature selection that utilized a combination of GWO and antlion optimization (ALO). By the (No Free Lunch) theorem, there has never been, there currently is not, and there will never be an optimization method that can handle all problems related to optimization. Despite the excellent performance of the approaches described above, it is safe to say that none of them can handle all of the issues associated with the feature selection process [35–38]. An algorithm’s performance may get worse when applied to datasets comparable to the ones it was designed for or datasets of a different sort. As a result, the solutions to problems involving feature selection can be improved by making enhancements to the approaches that are now in use [39–46].
The BlazePose system gives more information about joints than its predecessors and makes tracking more accurate. We think that the BlazePose system’s increase in the number of joints in the skeleton compared to other skeleton topologies (like OpenPose) will give us more information to help improve the ST-GCN model’s performance. The first difference between the two systems is how they figure out the pose from an image. OpenPose works from the bottom up, while BlazePose works from the top down. The first method identifies the body parts in the image and then maps them to the right person. The second method determines the person’s location and then estimates the main joints. We propose a novel skeleton topology that can help improve the performance of the ST-GCN model even more. The goal of the Enhanced-BlazePose topology is to make an even more accurate representation of the actions by adding more edges to the existing BlazePose topology. By adding feature selection layers with SFS-Guided WOA, we hope to understand how the shoulders and head move together during the activities. For the Kinetics dataset (D1) and the NTU-RGB+D dataset (D2). Fig. 3 shows the proposed topology definition for action recognition.

Figure 3: The architecture of the proposed approach
3.1 SFS-Guided WOA for Feature Selection
Inspired optimizers have recently been introduced for feature selection optimization, and these optimizers have been tested for their efficacy and capacity to move optimization problems from local to global optimization. The wrapper-based approach and the filter-based approach, two standard methods for assessing feature quality, are utilized. Using a population-based heuristic random intelligence algorithm, the “whale optimization algorithm” introduces a new type of algorithm. The algorithm’s local search ability is improved through a shrinking encircling mechanism and a spiral ascending mechanism, both of which are inspired by the predation behavior of humpback whales. In contrast, its global search ability is improved through a random learning method. It benefits from having few control parameters, easy calculation, and robust optimal solution searching capability. The Guided WOA is an improved version of the original WOA. Like the global search, the early WOA would cause whales to swim aimlessly in circles. However, this method isn’t without flaws; for instance, a more sophisticated system can replace a random whale's search strategy and direct the whales to the best possible solution or prey much more quickly. To boost exploration efficiency, the Guided-WOA algorithm lets a whale follow not just one but three random whales. This can encourage whales to expand their range without compromising their authority. The SFS algorithm uses a diffusion method that generates random walks to find the best solution. The answer can serve as the basis for these. This improves the exploratory power of the Guided WOA, and the diffusion process is employed to arrive at the best option. Diffusion around the most up-to-date position includes Gaussian random walks as shown in Fig. 4.

Figure 4: The SFS Guided WOA algorithm employed in feature selection
We resized each movie till it had the proportions 340 × 256 pixels. This did not consider any video frames in which the BlazePose system did not identify a skeleton as being present. Limiting the number of frames in the series of skeletons to just 300. As a result of this limitation, the majority of videos featured a limited number of frames. Because of this, if a sequence contained fewer than 300 frames, we repeated the first few until we reached the appropriate length. On the other hand, if the sequence contained more than 300 frames, we arbitrarily removed some excess frames. Using spatial configuration partitioning for joint label mapping, the model is trained for 80 epochs.
Each solution to the hybrid SFS Guided WOA is evaluated based on how well it meets a fitness function. The fitness function is proportional to the percentage of incorrect classifications and chosen features. Solutions are deemed effective if they reduce the number of features selected while maintaining or improving classification accuracy. The following equation is used to determine how effective each solution is:
where E(D) is the classification error rate for each dimension, s is the number of selected features, f is the number of features and
The results are shown in two stages: First, the performance achieved in SFS-Guided WOA with all feature selection performance metrics. The second SFS-Guided WOA, in conjunction with the BlazePose skeletal topology and stochastic fractal search, constructs a novel implementation of the BlazePose topology for action recognition.
Classification average error shows how accurate the classifier is given the selected feature set. The classification average error can be calculated in Eq. (2).
where M is the number of the run to the algorithm, N is the number of test points,
The Best Fitness function is the smallest fitness value for a particular optimizer throughout all M optimization steps. As the most optimistic of the solutions found, the best can be expressed mathematically in Eq. (3).
where
To execute an optimization process M times, the worst solution is the one with the worst Fitness. It is possible to express the worst-case scenario mathematically as the Eq. (4).
The average Fitness size is a measure of the typical proportion of selected features to all available features. The equation for this metric is Eq. (5).
Given a dataset of size(x), the number of features is x, where size(x) is the number of unique elements in the vector x. The mean represents the average of all solutions obtained by an optimization algorithm under Mean M running conditions. The mean performance of any stochastic optimizer can be expressed as a Eq. (6).
Standard deviation represents the variation of the best solutions found for running a stochastic optimizer for M different runs. Std is used as an indicator for optimizer stability and robustness. In contrast, Std is smaller, which means that the optimizer always converges to the same solution, while larger values for Std mean many random results. Std is formulated as in Eq. (7).
where M is the number of times to run the optimization algorithm to select the feature subset,
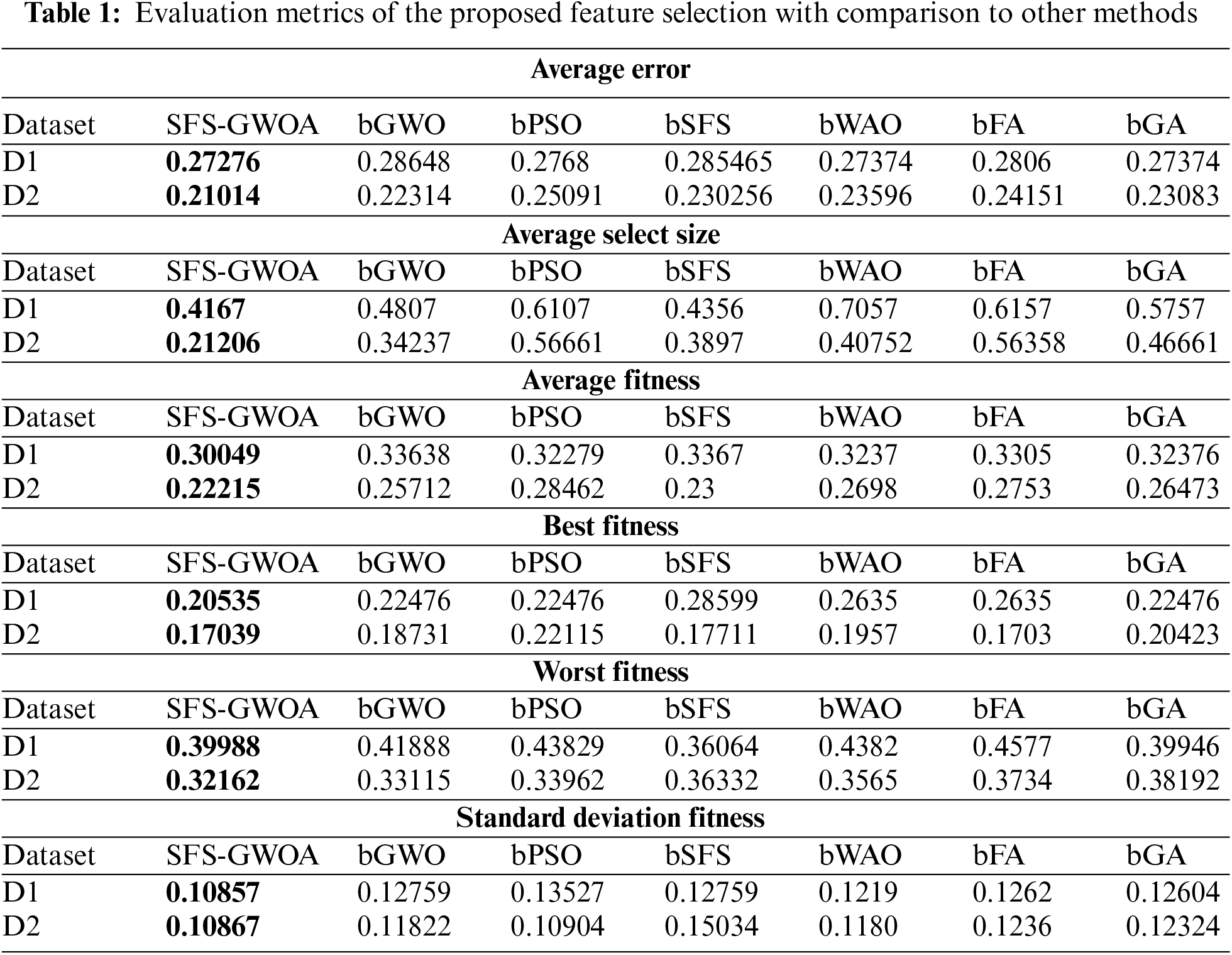
Table 1 displays the results-based evaluation measures that were used. There are six different evaluation measures shown here in the table. The results of the proposed feature selection algorithm are compared to those of six alternative feature selection methods. It is clear from this table that the proposed strategy achieves higher recorded values than the competing methods.
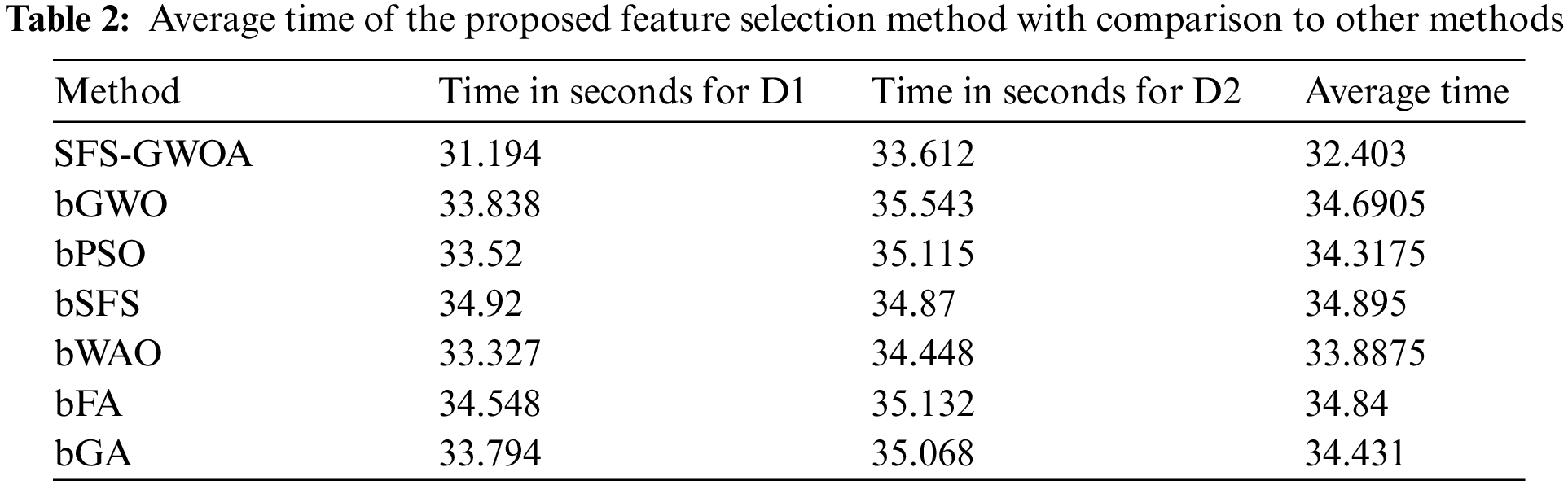
On the other hand, the time consumed in feature selection using the proposed approach and other approaches is presented in Table 2. In this table, we can see that the time required by the proposed approach is much lower than the time required by the other methods in selection the significant features necessary for action classification.
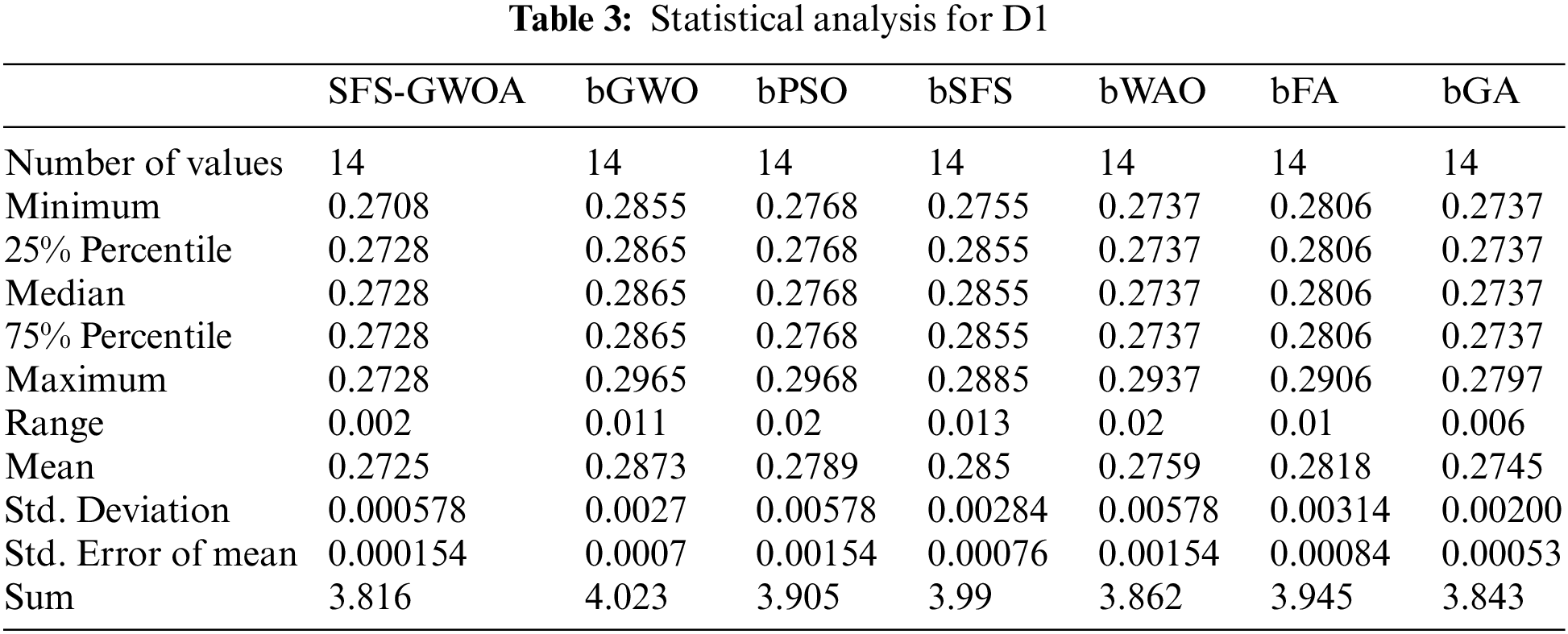
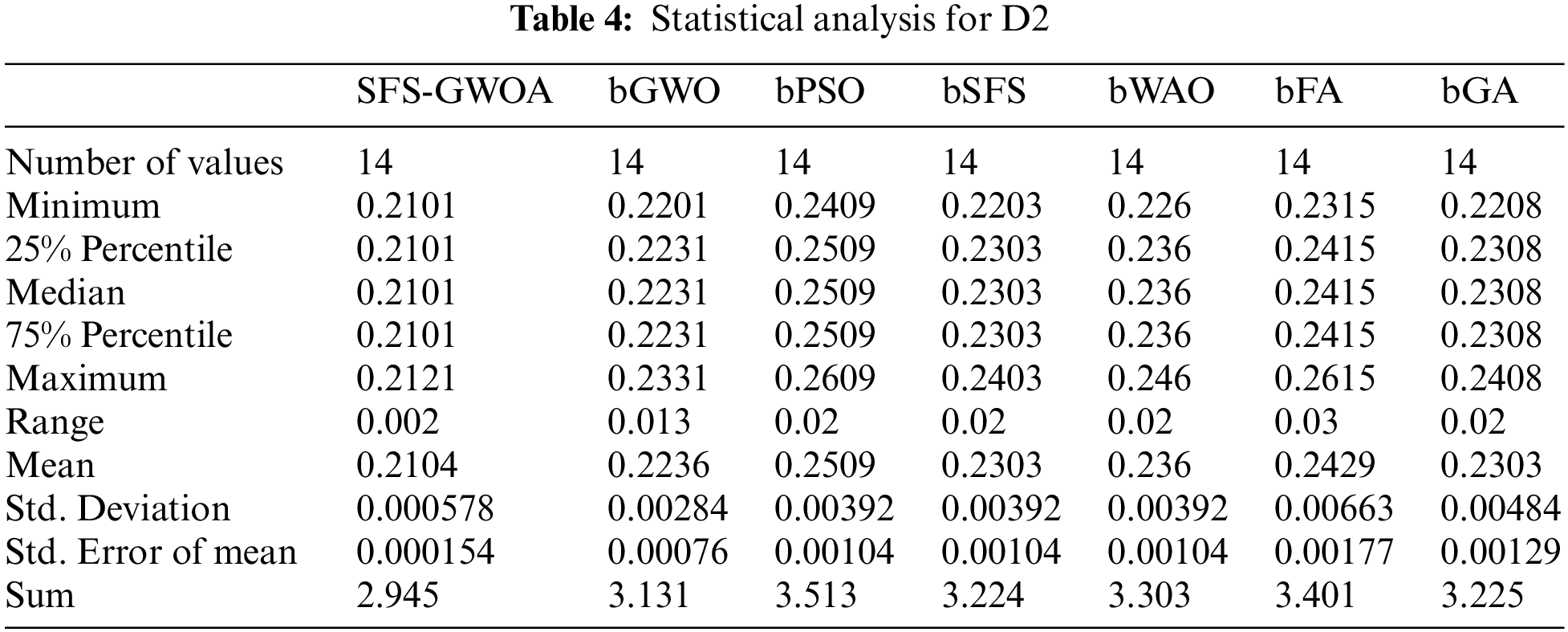
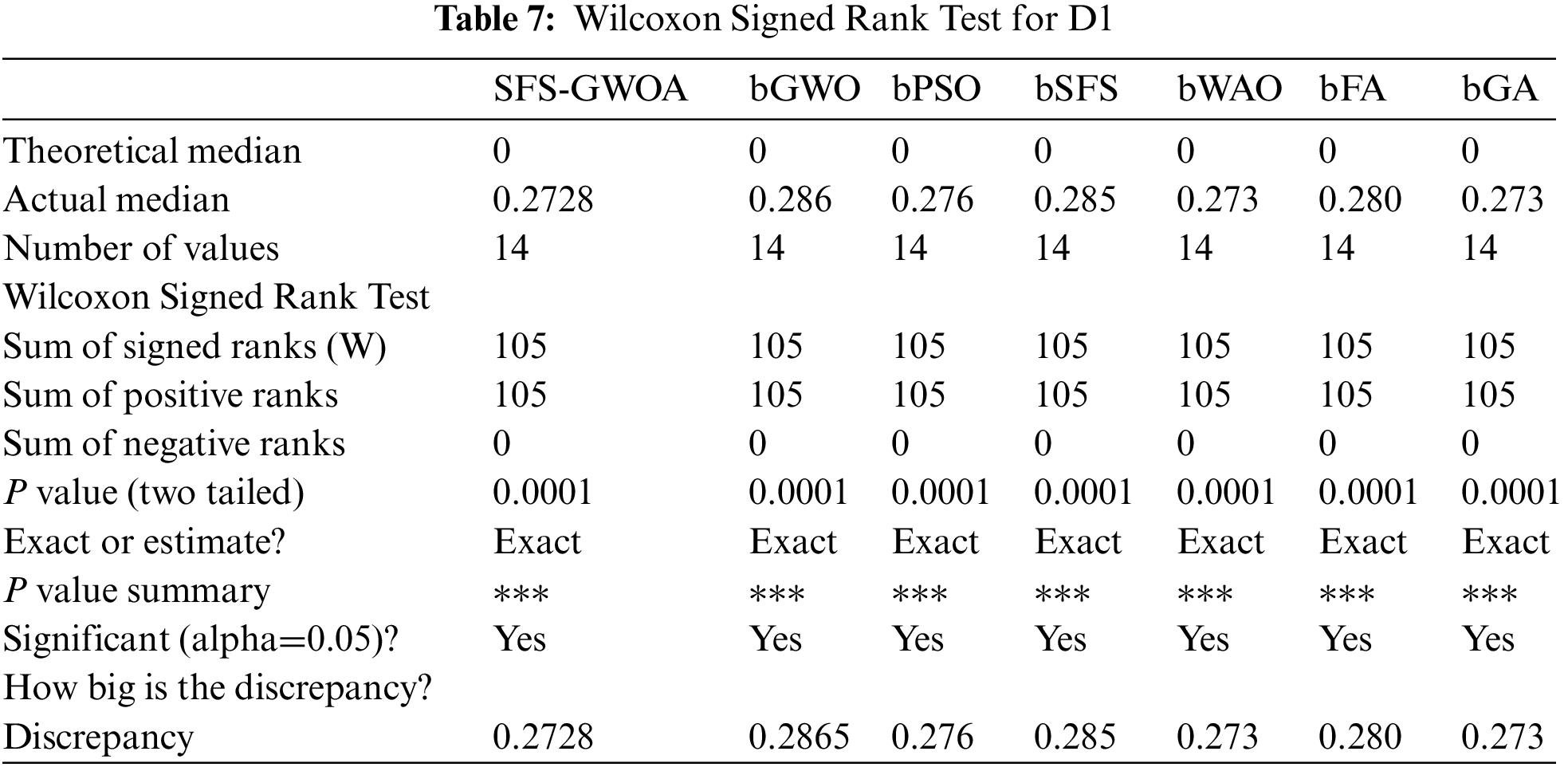
The statistical analysis of the results is presented in Tables 3–8. This analysis is presented in terms of the basic statistical measurements, one-way analysis of variance (ANOVA) and Wilcoxon signed-rank test. The results are compared to the other feature selection methods to confirm the superiority and stability of the proposed approach. The results presented in these tables confirm the expected findings.



Another way to demonstrate the effectiveness of the proposed approach is by visualizing the achieved results. Fig. 5 shows the quartile-quartile (QQ) plot for the achieved results based on the two datasets, D1 and D2. In this figure, it can be noted that the performance of the proposed approach is accurate in classifying the actions.
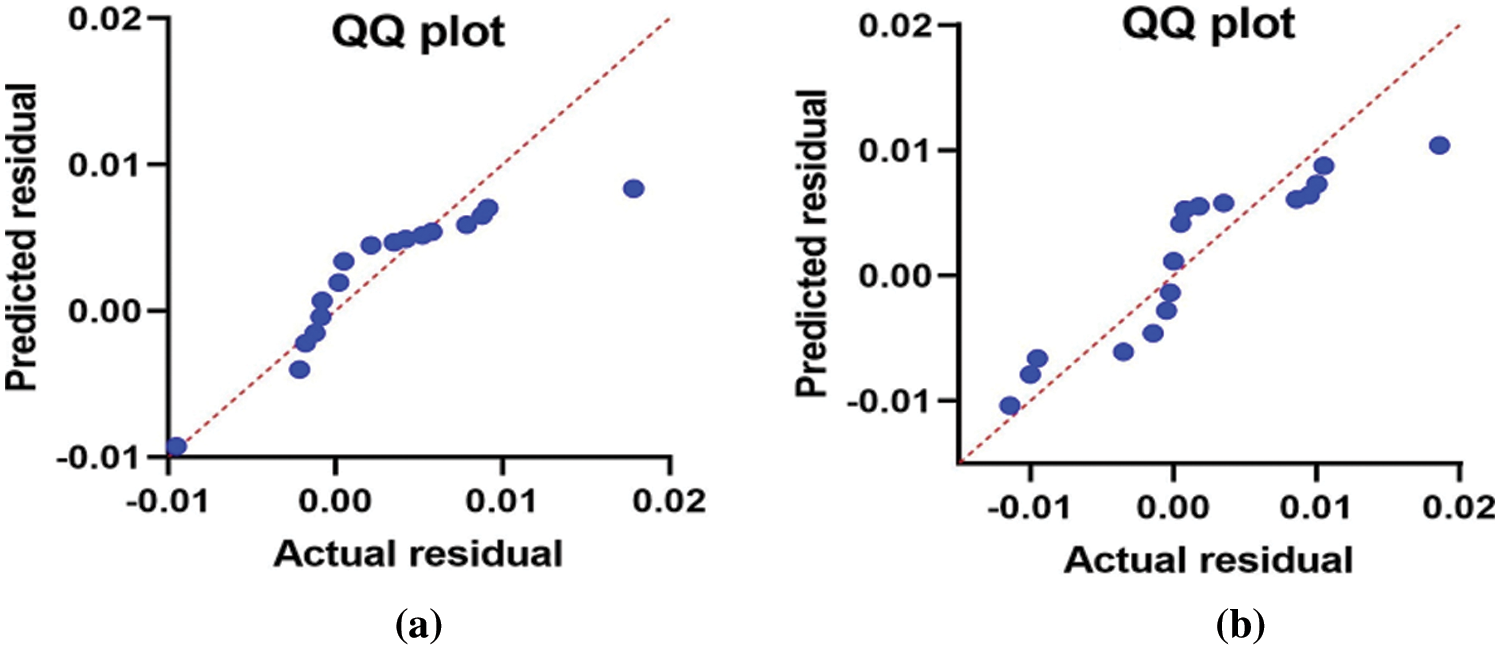
Figure 5: QQ plots. (a) For dataset D1, (b) For Dataset D2
In addition, the plots shown in Fig. 6 depict the values of the objective function for the two datasets using the proposed feature selection algorithm compared to the other six feature selection methods. It can be noted in this figure that the proposed approach is more accurate than the other approaches.
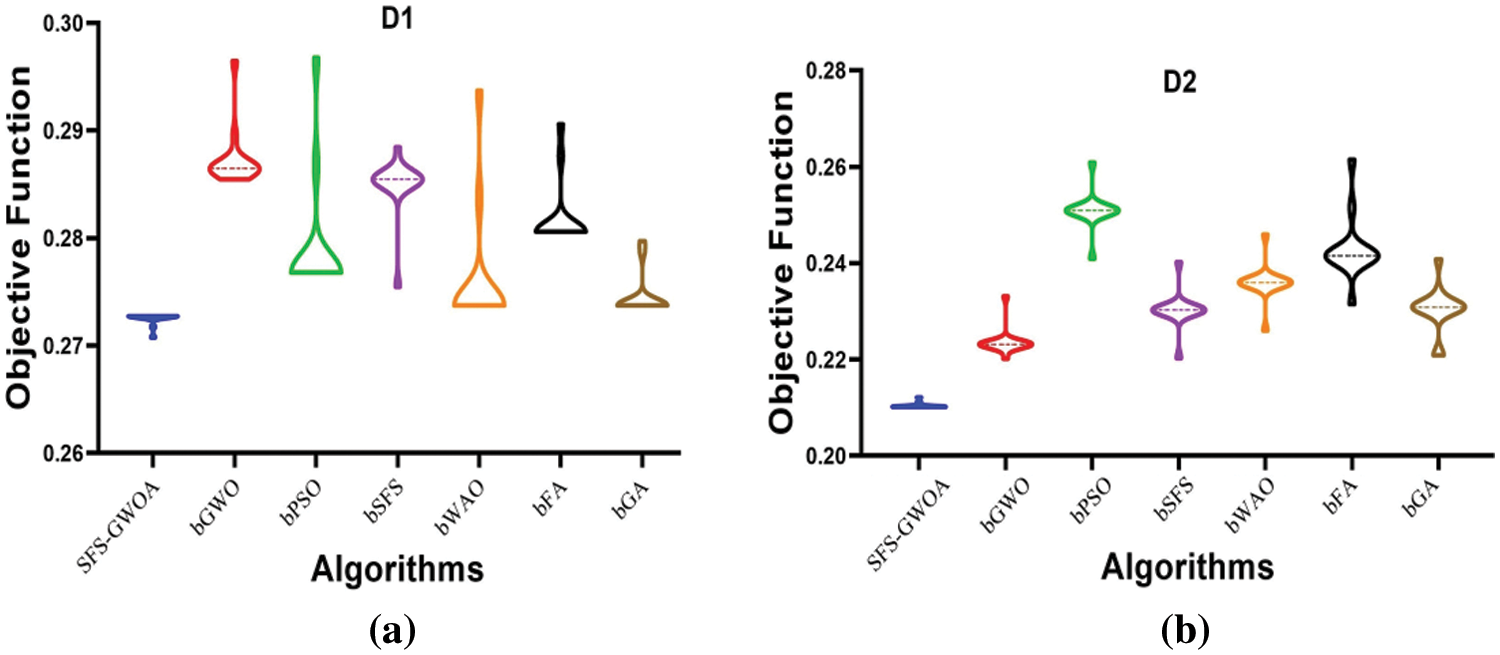
Figure 6: The values of the objective function (a) For dataset D1, (b) For Dataset D2
The histogram of the achieved results is shown in Fig. 7 for the two datasets. This figure is used to study the stability of the proposed approach. This finding is confirmed by the results shown in this figure compared to the other methods for both datasets.
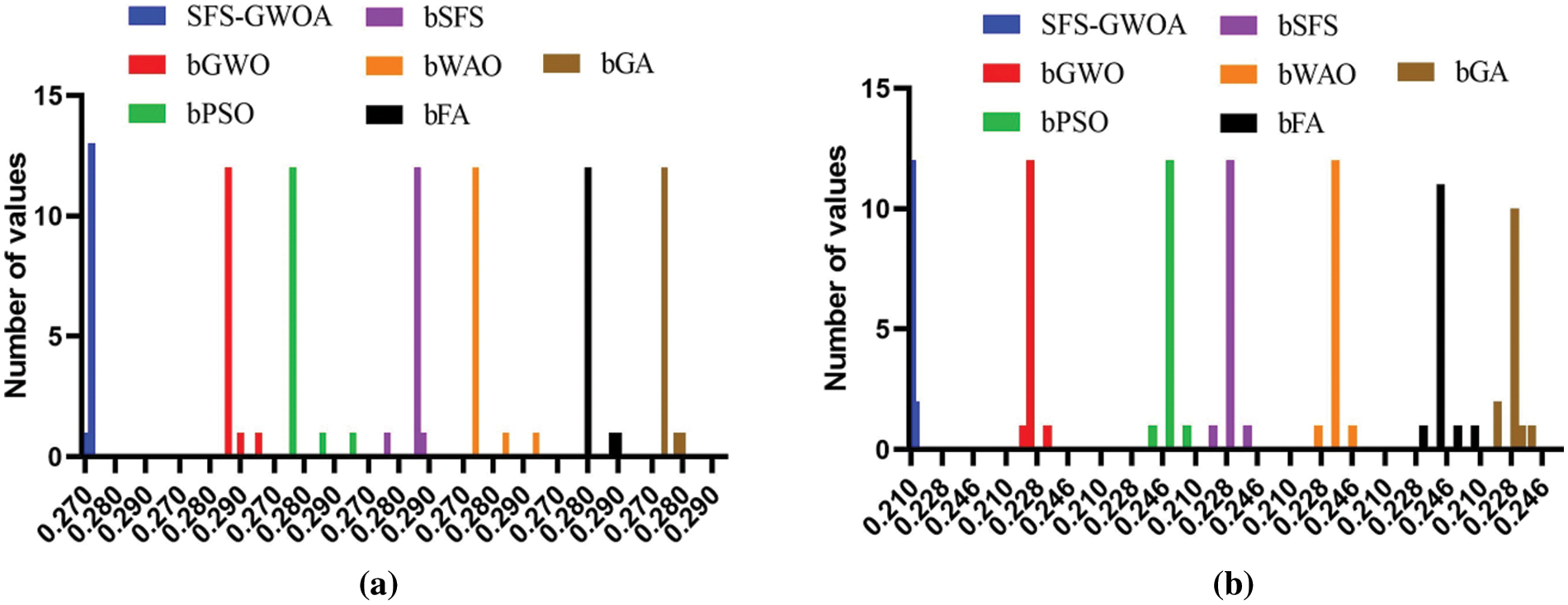
Figure 7: Histogram results. (a) For dataset D1, (b) For Dataset D2
4.3 Action Recognition Results
The action recognition results achieved by the proposed approach are compared to the previous ST-GCN, ST-GDN, and BlazePose methods. The comparison results are presented in Table 9 regarding the Kinetics dataset (D1).

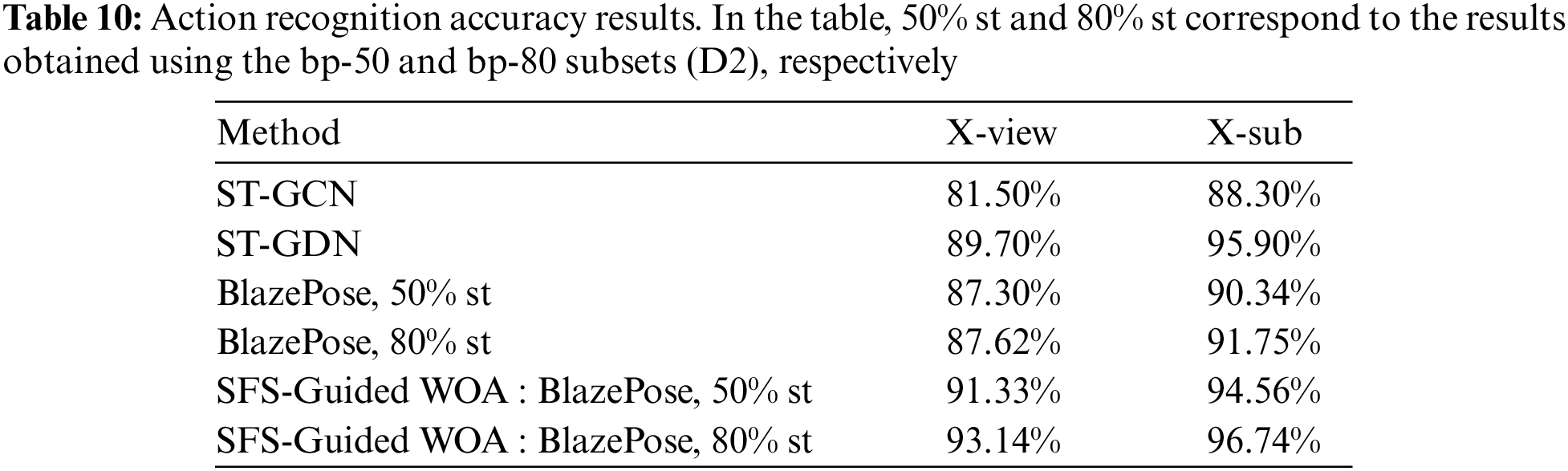
The proposed approach is evaluated using the Cross-Subject (X-Sub) and Cross-View (X-View) criteria suggested by the dataset’s developers. Table 10 presents the action recognition results using the proposed approach. In this table, 50% st and 80% st correspond to the results obtained using the bp-50 and bp-80 subsets (D2). The accuracy achieved by the proposed approach in the case of 50% is 91.33% for X-View and 94.56% for the X-Sub, which are higher than the other methods included in the conducted experiments. In addition, the accuracy of action recognition using the proposed approach is 93.13% and 96.74% for 80% st of the dataset D2. These results confirm the effectiveness of the proposed approach in recognizing human actions.
This study introduces a new action-recognition method by building the BlazePose skeleton topology on top of the ST-GCN architecture and selecting features with SFS-Guided WOA. We have chosen the Kinetics and NTU-RGB+D benchmark datasets to give a reliable basis for comparison with the baseline model in. When the visual data has been acquired in unconstrained contexts, we advocated using alternative skeletal detection criteria to increase the model’s performance. We conclude with research that contrasts the suggested strategy with BlazePose, ST-GCN, and ST-GDN. We have demonstrated that BlazePose’s topology may be improved by selecting the appropriate features for feet and hands, resulting in more precise data about the motion being captured. In addition, the suggested topology in this research can improve performance even more. The potential drawback of the proposed methodology is the complexity of the proposed feature selection methods. However, this drawback can be verified when applying the proposed methodology on different case studies, which is planned for the future work.
Funding Statement: The authors received no funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Z. Cao, G. Hidalgo, T. Simon, S. Wei and Y. Sheikh, “OpenPose: Realtime multi-person 2D pose estimation using part affinity fields,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 43, no. 1, pp. 172–186, 2021. [Google Scholar] [PubMed]
2. V. Bazarevsky, I. Grishchenko, K. Raveendran, T. Zhu, F. Zhang et al., “BlazePose: On-device real-time body pose tracking,” arXiv: 2006.10204, 2020. [Online]. Available: https://arxiv.org/abs/2006.10204 [Google Scholar]
3. W. Zhang, J. Fang, X. Wang and W. Liu, “EfficientPose: Efficient human pose estimation with neural architecture search,” Computational Visual Media, vol. 7, no. 3, pp. 335–347, 2021. [Google Scholar]
4. L. Shi, Y. Zhang, J. Cheng and H. Lu, “Two-stream adaptive graph convolutional networks for skeleton-based action recognition,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Long Beach, CA, USA, pp. 12026–12035, 2019. [Google Scholar]
5. T. Ahsan, S. Khalid, S. Najam, M. A. Khan, Y. J. Kim et al., “Hrneto: Human action recognition using unified deep features optimization framework,” Computers, Materials & Continua, vol. 75, no. 1, pp. 1089–1105, 2023. [Google Scholar]
6. F. Shehzad, M. A. Khan, M. A. E. Yar, M. Sharif, M. Alhaisoni et al., “Two-stream deep learning architecture-based human action recognition,” Computers, Materials & Continua, vol. 74, no. 3, pp. 5931–5949, 2023. [Google Scholar]
7. Y. Liu, R. Ma, H. Li, C. Wang and Y. Tao, “RGB-D human action recognition of deep feature enhancement and fusion using two-stream ConvNet,” Sensors, vol. 2021, no. 1, pp. 1–10, 2021. [Google Scholar]
8. C. Yang, A. Setyoko, H. Tampubolon and K. Hua, “Pairwise adjacency matrix on spatial temporal graph convolution network for skeleton-based two-person interaction recognition,” in 2020 IEEE Int. Conf. on Image Processing (ICIP), Virtual, pp. 2166–2170, 2020. [Google Scholar]
9. M. Alsawadi and M. Rio, “Skeleton-split framework using spatial temporal graph convolutional networks for action recognition,” in 2021 4th Int. Conf. Bio-Engineering for Smart Technologies (BioSMART), Paris, France, pp. 1–5, 2021. [Google Scholar]
10. A. Pauzi, F. Mohd Nazri, S. Sani, A. Bataineh, M. Hisyam et al., “Movement estimation using mediapipe BlazePose,” in 7th Int. Visual Informatics Conf., Kajang, Malaysia, pp. 562–571, 2021. [Google Scholar]
11. I. Nasir, M. Raza, J. Shah, S. Wang, U. Tariq et al., “HAREDNet: A deep learning based architecture for autonomous video surveillance by recognizing human actions,” Computers and Electrical Engineering, vol. 99, pp. 107805, 2022. [Google Scholar]
12. S. Khan, M. Khan, M. Alhaisoni, U. Tariq, H. -S. Yong et al., “Human action recognition: A paradigm of best deep learning features selection and serial based extended fusion,” Sensors, vol. 21, no. 23, pp. 7941, 2021. [Google Scholar] [PubMed]
13. A. Shahroudy, J. Liu, T. Ng and G. Wang, “NTU RGB+D: A large scale dataset for 3D human activity analysis,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, pp. 1010–1019, 2016. [Google Scholar]
14. M. Skublewska-Paszkowska, P. Powroznik and E. Lukasik, “Learning three dimensional tennis shots using graph convolutional networks,” Sensors, vol. 20, no. 21, pp. 1–12, 2020. [Google Scholar]
15. X. Cao, W. Kudo, C. Ito, M. Shuzo and E. Maeda, “Activity recognition using ST-GCN with 3D motion data,” in Adjunct Proc. of the 2019 ACM Int. Joint Conf. on Pervasive and Ubiquitous Computing and Proc. of the 2019 ACM Int. Symp. on Wearable Computers, London, United Kingdom, pp. 689–692, 2019. [Google Scholar]
16. D. Khafaga, A. Alhussan, E. -S. M. El-Kenawy, A. Ibrahim, M. Eid et al., “Solving optimization problems of metamaterial and double T-shape antennas using advanced meta-heuristics algorithms,” IEEE Access, vol. 10, pp. 74449–74471, 2022. [Google Scholar]
17. Y. Galvão, L. Portela, J. Ferreira, P. Barros, O. Fagundes et al., “A framework for anomaly identification applied on fall detection,” IEEE Access, vol. 9, pp. 77264–77274, 2021. [Google Scholar]
18. Y. Jiang, K. Song and J. Wang, “Action recognition based on fusion skeleton of two kinect sensors,” in 2020 Int. Conf. on Culture-Oriented Science & Technology (ICCST), Beijing, China, pp. 240–244, 2020. [Google Scholar]
19. M. Alsawadi and M. Rio, “Skeleton split strategies for spatial temporal graph convolution networks,” Computers, Materials & Continua, vol. 71, no. 3, pp. 4643–4658, 2022. [Google Scholar]
20. D. Sami Khafaga, A. Ali Alhussan, E. M. El-kenawy, A. E. Takieldeen, T. M. Hassan et al., “Meta-heuristics for feature selection and classification in diagnostic breast cancer,” Computers, Materials & Continua, vol. 73, no. 1, pp. 749–765, 2022. [Google Scholar]
21. N. Heidari and A. Iosifidis, “On the spatial attention in spatio-temporal graph convolutional networks for skeleton-based human action recognition,” in 2021 Int. Joint Conf. on Neural Networks (IJCNN), Virtual, pp. 1–7, 2021. [Google Scholar]
22. A. Abdelhamid and S. Alotaibi, “Optimized two-level ensemble model for predicting the parameters of metamaterial antenna,” Computers, Materials & Continua, vol. 73, no. 1, pp. 917–933, 2022. [Google Scholar]
23. U. Bahukhandi and S. Gupta, “Yoga pose detection and classification using machine learning techniques,” International Research Journal of Modernization in Engineering Technology and Science, vol. 3, no. 12, pp. 186–191, 2021. [Google Scholar]
24. D. Neogi, N. Das and S. Deb, “FitNet: A deep neural network driven architecture for real time posture rectification,” in 2021 Int. Conf. on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT), Bahrain, pp. 354–359, 2021. [Google Scholar]
25. M. Shams, “Hybrid neural networks in generic biometric system: A survey,” Journal of Artificial Intelligence and Metaheuristics, vol. 1, no. 1, pp. 20–26, 2022. [Google Scholar]
26. A. Takieldeen, E. M. El-kenawy, M. Hadwan and R. M. Zaki, “Dipper throated optimization algorithm for unconstrained function and feature selection,” Computers, Materials & Continua, vol. 72, no. 1, pp. 1465–1481, 2022. [Google Scholar]
27. Z. Cao, T. Simon, S. Wei and Y. Sheikh, “Realtime multi-person 2D pose estimation using part affinity fields,” in 2017 IEEE Conf. Computer Vision and Pattern Recognition (CVPR), Honolulu, Hawaii, USA, pp. 1302–1310, 2017. [Google Scholar]
28. H. Fan, X. Yu, Y. Ding, Y. Yang and M. Kankanhalli, “PSTNET: Point spatio-temporal convolution on point cloud sequences,” in Int. Conf. on Learning Representations, Virtual, pp. 1–24, 2020. [Google Scholar]
29. V. Bazarevsky, Y. Kartynnik, A. Vakunov, K. Raveendran and M. Grundmann, “Blazeface: Sub-millisecond neural face detection on mobile GPUs,” arXiv Preprint arXiv1907.05047, 2019. [Google Scholar]
30. “MediaPipe,” 2022. [Online]. Available: https://mediapipe.dev [Google Scholar]
31. A. Abdelhamid and S. R. Alotaibi, “Robust prediction of the bandwidth of metamaterial antenna using deep learning,” Computers, Materials & Continua, vol. 72, no. 2, pp. 2305–2321, 2022. [Google Scholar]
32. A. Ibrahim, S. Mirjalili, M. El-Said, S. M. Ghoneim, M. Al-Harthi et al., “Wind speed ensemble forecasting based on deep learning using adaptive dynamic optimization algorithm,” IEEE Access, vol. 9, pp. 125787–125804, 2021. [Google Scholar]
33. E. El-kenawy, F. Albalawi, S. Ward, S. Ghoneim, M. Eid et al., “Feature selection and classification of transformer faults based on novel meta-heuristic algorithm,” Mathematics, vol. 10, no. 3144, pp. 1–28, 2022. [Google Scholar]
34. D. Khafaga, A. Alhussan, E. El-kenawy, A. Ibrahim, S. Abd Elkhalik et al., “Improved prediction of metamaterial antenna bandwidth using adaptive optimization of LSTM,” Computers, Materials & Continua, vol. 73, no. 1, pp. 865–881, 2022. [Google Scholar]
35. N. Samee, E. El-Kenawy, G. Atteia, M. Jamjoom, A. Ibrahim et al., “Metaheuristic optimization through deep learning classification of COVID-19 in chest X-ray images,” Computers, Materials and Continua, vol. 73, no. 2, pp. 4193–4210, 2022. [Google Scholar]
36. A. Ibrahim, S. Mirjalili, M. El-Said, S. Ghoneim, M. Al-Harthi et al., “Wind speed ensemble forecasting based on deep learning using adaptive dynamic optimization algorithm,” IEEE Access, vol. 9, pp. 125787–125804, 2021. [Google Scholar]
37. G. Yao, X. Liu and T. Lei, “Action recognition with 3D ConvNet-GRU architecture,” in Proc. of the 3rd Int. Conf. on Robotics, Control and Automation, Chengdu, China, pp. 208–213, 2018. [Google Scholar]
38. E. -S. M. El-Kenawy, S. Mirjalili, A. Abdelhamid, A. Ibrahim, N. Khodadadi et al., “Meta-heuristic optimization and keystroke dynamics for authentication of smartphone users,” Mathematics, vol. 10, no. 16, pp. 1–26, 2022. [Google Scholar]
39. O. Nafea, W. Abdul, G. Muhammad and M. Alsulaiman, “Sensor-based human activity recognition with spatio-temporal deep learning,” Sensors, vol. 21, no. 6, pp. 2141, 2021. [Google Scholar] [PubMed]
40. P. Pareek and A. Thakkar, “A survey on video-based human action recognition: Recent updates, datasets, challenges, and applications,” Artificial Intelligence Review, vol. 54, no. 1, pp. 2259–2322, 2021. [Google Scholar]
41. Z. Li, F. Nie, D. Wu, Z. Hu and X. Li, “Unsupervised feature selection with weighted and projected adaptive neighbors,” IEEE Transactions on Cybernetics, vol. 53, no. 2, pp. 1260–1271, 2023. [Google Scholar] [PubMed]
42. F. Nie, Z. Wang, L. Tian, R. Wang and X. Li, “Subspace sparse discriminative feature selection,” IEEE Transactions on Cybernetics, vol. 52, no. 6, pp. 4221–4233, 2022. [Google Scholar] [PubMed]
43. M. Khan, Y. Zhang, S. Khan, M. Attique, A. Rehman et al., “A resource conscious human action recognition framework using 26-layered deep convolutional neural network,” Multimedia Tools and Applications, vol. 80, no. 28, pp. 35827–35849, 2021. [Google Scholar]
44. F. Nie, X. Dong, L. Tian, R. Wang and X. Li, “Unsupervised feature selection with constrained
45. J. Miao, Y. Ping, Z. Chen, X. Jin, P. Li et al., “Unsupervised feature selection by non-convex regularized self-representation,” Expert Systems with Applications, vol. 173, no. 7, pp. 1–11, 2021. [Google Scholar]
46. M. Eid, E. El-Kenawy, N. Khodadadi, S. Mirjalili, E. Khodadadi et al., “Meta-heuristic optimization of LSTM-based deep network for boosting the prediction of monkeypox cases,” Mathematics, vol. 10, no. 20, pp. 1–20, 2022. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools