
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Recognition for Frontal Emergency Stops Dangerous Activity Using Nano IoT Sensor and Transfer Learning
1 Sports Centre, Xi’an Jiaotong University, Xi’an, 710049, China
2 School of Economics and Management, Xi’an University of Technology, Xi’an, 710054, China
* Corresponding Author: Zhanhe Du. Email:
Intelligent Automation & Soft Computing 2023, 37(1), 1181-1195. https://doi.org/10.32604/iasc.2023.037497
Received 06 November 2022; Accepted 10 March 2023; Issue published 29 April 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Currently, it is difficult to extract the depth feature of the frontal emergency stops dangerous activity signal, which leads to a decline in the accuracy and efficiency of the frontal emergency stops the dangerous activity. Therefore, a recognition for frontal emergency stops dangerous activity algorithm based on Nano Internet of Things Sensor (NIoTS) and transfer learning is proposed. First, the NIoTS is installed in the athlete’s leg muscles to collect activity signals. Second, the noise component in the activity signal is removed using the de-noising method based on mathematical morphology. Finally, the depth feature of the activity signal is extracted through the deep transfer learning model, and the Euclidean distance between the extracted feature and the depth feature of the frontal emergency stops dangerous activity signal is compared. If the European distance is small, it can be judged as the frontal emergency stops dangerous activity, and the frontal emergency stops dangerous activity recognition is realized. The results show that the average time delay of activity signal acquisition of the algorithm is low, the signal-to-noise ratio of the action signal is high, and the activity signal mean square error is low. The variance of the frontal emergency stops dangerous activity recognition does not exceed 0.5. The difference between the appearance time of the dangerous activity and the recognition time of the algorithm is 0.15 s, it can accurately and quickly recognize the frontal emergency stops the dangerous activity.Keywords
With the rapid development of computer and Internet of Things (IoT) technology, the external equipment for data collection has also undergone tremendous changes. In particular, IoT technology, which takes sensors as an essential component, has extensively promoted the collection and processing of human activity information. With the continuous development of computer technology, activity recognition technology has gradually matured and been widely used in sports, medicine, military and other research fields, with significant production and research value [1]. At present, activity recognition technology is a cutting-edge technology with huge commercial potential. Activity analysis can enable people to grasp the attributes of the target object’s activities, such as designing a remote health monitoring system for patients in the medical field, in a bid to analyze the behavior characteristics of patients, judge their health, and ensure that patients’ behaviors are not dangerous [2]. From the perspective of ergonomics, an activity recognition algorithm can accurately recognize human posture; from the perspective of sports application, activity recognition algorithm can collect information about athletes’ activities and recognition whether there is danger in such activities [3]. In this paper, Nano Internet of Things Sensor (NIoTS) and transfer learning are integrated into the design process of dangerous activity recognition of the frontal emergency stops algorithm. NIoTS can be operated at the atomic and molecular scales, making full use of the unique properties of Nanomaterials, such as reactivity, Raman spectrum effect, catalytic efficiency, conductivity, strength, hardness, toughness, super-plasticity and super-para-magnetism. Therefore, they have many significant characteristics, such as high sensitivity, low power consumption, low cost and multi-function integration. Transfer learning is an idea, not a method. Specifically, the knowledge or pattern learned from a certain field or task is applied to different but related fields or problems, with the characteristics of high speed and good convergence. The deep fusion of the two can improve the quality and efficiency of dangerous activity recognition of frontal emergency stops.
In the application process of the above algorithms, the recognition variance in dangerous activity recognition of frontal emergency stop is significant, and the difference between the occurrence time of dangerous activity and the recognition time of the algorithm is high, which leads to the effect of dangerous activity recognition of frontal emergency stop cannot reach the ideal level. It is difficult to extract the depth feature of the frontal emergency stop dangerous action signal, and the recognition efficiency is low, and it cannot accurately and quickly recognition the frontal emergency stop dangerous action. Therefore, to address these problems as the research goal, this paper proposes a dangerous activity recognition of frontal emergency stops algorithm based on NIoTS and transfer learning. The main innovations of this paper are as follows: (1) The activity signal is collected by installing Nano IoT Sensor, and the collected signal belongs to a non-high frequency signal with strong anti-interference. When this sensor is configured on athletes, there is no need to use conductive paste. The method has a long service life, which can ensure the accuracy and efficiency of signal acquisition. (2) In this paper, mathematical morphology is used to realize activity signal de-noising. This method is simple to operate and does not need large-scale calculation, which lays a solid foundation for the subsequent dangerous activity recognition of frontal emergency stops. (3) When recognizing the dangerous activity of a frontal emergency stops, the depth transfer learning model used in this paper belongs to one of the core technologies of artificial intelligence technology, with remarkable generalization performance, high speed and good convergence characteristics, which ensures the quality and efficiency of recognition. (4) The results using different data sets show that the dangerous activity recognition of frontal emergency stops algorithm in this paper based on NIoTS and transfer learning can quickly and accurately recognize the dangerous activities of frontal emergency stops.
The structure of the paper is discussed as follows: The introduction of the proposed work is discussed in section 1; Section 2 gives a detailed discussion of the proposed algorithm; Section 3 gives experimental analysis and results of the proposed work; finally, the conclusion and future work of the model is discussed in Section 4.
This research is to recognize the dangerous activity of athletes’ frontal emergency stops from the perspective of a sport application. At present, there are many research achievements in the field of activity recognition [4]. For example, Xia et al. [5] proposed a motion recognition algorithm based on local self-similar descriptors and visual robust multi-task learning, and designed a composite interactive feature representation method, which encodes the local motion of the point of interest and the spatial distribution of its context. The local self-similar descriptor represented by the time pyramid arch is used to reduce the influence of observation angle change on recognition and retaining time information. In order to explore the potential correlation between different interaction behaviors and different views, the corresponding behavior recognition model is learned by robust multi-task learning and robust model decomposition of image set constraint punishment. However, the algorithm has many recognition errors. Chen et al. [6] proposed a motion recognition algorithm driven by electromyography signals. Firstly, the muscle function network is constructed by analyzing the correlation characteristics between EMG channels through mutual information. Secondly, through the calculation of the characteristics of nodes and evaluation of the importance of nodes, the characteristics of the network under different motion conditions are analyzed. Finally, the convergence cross-mapping method is applied to construct a directed network to realize motion recognition. However, this method can only deal with motion recognition problems with short duration. If the duration is significant and the dimension of motion data changes, the operation becomes more difficult. Zhuo et al. [7] proposed a motion recognition algorithm based on a multi-mode deep neural network. The 3D CNN architecture is used to extract the features of RGB video frames, LSTM is used to extract the SSDDI graphic motion recognition features, and a multi-mode depth neural network model is built based on the feature extraction results. This model uses a joint cost function, including cross entropy loss and distance constraints between the feature space of training samples and their center values in each category to achieve motion recognition. However, the deep neural network model constructed in this paper requires a large amount of data for model training, and the amount of data for frontal emergency stops hazard maneuvers in practical applications is relatively small, it makes the algorithm converge slowly, and the computing efficiency is reduced. Murakami et al. [8] proposed a motion recognition algorithm based on directional motion history image. This algorithm uses the human motion representation and translation method of directional motion history images to extract motion features. And the matching graph is used to execute the motion recognition task. When performing the matching of the graph, this method changes the interval of the selected image frames and checks the most appropriate interval. When the matching of the execution graph is completed, the relevant motion recognition results are obtained. However, the algorithm has the problem of lower efficiency compared to deep learning computation. Therefore, the results are not satisfactory in practical applications. Yang et al. [9] proposed motion recognition algorithm based on data redundancy technology. First, the data redundancy technology and perceptual hash technology are combined to form an index. The image is filtered from the structure, color and texture features of the human motion image to achieve image redundancy processing. Then, the depth feature of the processed image is extracted using the depth motion map. Finally, the convolutional neural network is used for feature recognition to achieve the purpose of motion recognition. However, the training of the model in this paper is still affected in practical applications due to the small amount of data on frontal emergency stops hazard maneuvers, resulting in slower convergence and lower computational efficiency.
In a word, various methods of recognizing dangerous actions are discussed in relevant work. However, for these methods, it is easy to ignore the details in signal acquisition, resulting in certain recognition errors. In this study, we proposed a recognition for frontal emergency stops dangerous activity algorithm based on NIoTS and transfer learning, which can accurately and quickly recognize frontal emergency stop dangerous actions.
Activity recognition is a cross-research topic of multiple disciplines, such as IoT information acquisition, machine learning, pattern recognition and artificial intelligence, and has strong practical applications in video surveillance. It has practical application value in the fields of video surveillance, human-computer interaction, medical care, and so on. To accurately and efficiently complete frontal emergency stops hazard activity recognition. This paper proposes an algorithm based on NIoTS and transfer learning to recognize the dangerous activities of a frontal emergency stops. Its overall architecture is shown in Fig. 1.

Figure 1: Framework of the proposed algorithm
The algorithm has three core steps: firstly, it needs to use NIoTS to collect athletes’ activity signals; Secondly, athletes’ activity signal acquisition effect may be affected by external factors, NIoTS deviation and other interference conditions, resulting in noise in the activity signal collected by NIoTS, which further affects the follow-up activity recognition accuracy. Therefore, this paper uses the activity signal de-noising method based on mathematical morphology to remove the noise data in the activity signal to improve its purity of the activity signal. Finally, the processed activity signals are used as the recognition sample data of the depth transfer learning algorithm to train the deep transfer learning model, and the experimental samples are input into the model to judge whether the athletes have the dangerous activity of frontal emergency stops and complete the dangerous activity of frontal emergency stops.
3.1 Activity Signal Acquisition Method Based on NIoTS
The NIoTS is installed on the athletes’ leg muscles to collect the activity signal. The NIoTS structure is mainly divided into Nano-collector, Nano-repeater and Nano-sink node.
In the collection of athlete’s leg muscle activity signals, the Nano-collector is set at the athletes’ leg muscle, and the collected activity signals are transmitted to the Nano-repeater, which forwards the collected signals to the Nano-sink node. The sink node collects the acquired activity signals. Because the communication area of the Nano-collector is not large, and the environment of the athletes is variable, the Nano-communication link will be negatively affected. Therefore, to obtain high-precision activity signals and ensure that the information transmission network of NIoTS is not abnormal, multiple Nano-collectors are set according to the size of athletes’ muscles. The number and location need to be set according to the specific conditions of athletes [10].
Set the collection of Nano collectors as:
where m represents the number of Nano collectors. Let the set of alternative positions of Nano repeaters be
where q refers to the serial number of the Nano aggregation node location point
The Nano-repeater in the communication interval of the Nano-collector is described as a vector L. For Nano-collector
Based on the alternative positions of the Nano-collector and Nano-repeater and the positions of the Nano-sink node, the connectivity parameters of the NIoTS information transmission can be obtained through calculation. Set the coverage area of the Nano-collector as
Set the coverage interval size of the Nano-sink node R to
3.2 Activity Signal De-Noising Method Based on Mathematical Morphology
Mathematical morphology uses the form of morphological transformation for signal de-noising. It has achieved good application results over the years. Morphological transformation can decompose complex activity signal data into multiple parts with physical significance, and separate the background [12]. This process does not change the attributes of the original activity signal data. Therefore, this method is more suitable for the data de-noising link in the frontal emergency stops activity recognition algorithm. Therefore, based on mathematical morphology, this paper de-noises the activity signal data collected in Section 3.1. The specific noise reduction process is as follows.
Suppose that the discrete function of the activity signal
Under the above setting conditions, when the activity signal is processed, the steps of corrosion and expansion operation of
where
where
To effectively remove the noise component of the activity signal, this paper designs an open-close and close-open combined morphological filter based on the cascade mode of open and close of the activity signal morphology [13,14]. This filter is a recombination filter. Activity signal de-noising is performed based on this filter, and the calculation formula is as follows
where
3.3 Recognition Model of Frontal Emergency Stops Dangerous Activities
Deep learning model training needs to use a large amount of data, considering the relatively small amount of athletes’ frontal emergency stops dangerous activity data, to obtain a better deep learning effect, this paper constructs a deep transfer learning-based frontal emergency stops dangerous activity recognition model. Transfer learning is used to migrate the parameters of the deep learning model completed by training a large amount of data into the activity recognition model to speed up the convergence of the network. When recognizing whether there is a frontal emergency stops the dangerous activity, the activity signal after noise removal in Section 2.2 is taken as the input sample of the deep transfer learning model in this paper to obtain the depth activity characteristics of the athletes’ activity signal. The full connection layer uses the nearest neighbor algorithm to judge the European distance between the activity signal and the dangerous activity of frontal emergency stops signal. If the European distance is small, it can be judged as the dangerous activity of frontal emergency stops. The output of the last fully connected layer of the model is the result of the classification of the athletes’ activities as dangerous or not [15].
3.3.1 Activity Recognition Model Training
In this paper, some data from NBA data set and Football Action data set are used as transfer learning source domain data set, and the source domain dataset is used to train deep transfer learning model, and the trained model parameters are saved. It is applied to the activity recognition model to complete the recognition of dangerous activities of frontal emergency stops by analyzing target domain data. Train the activity signal
The cross entropy-loss function can describe the accuracy of the deep transfer learning model to activity recognition. The purpose of training the deep transfer learning model is to increase the accuracy of the deep transfer learning model to identify the dangerous activity of frontal emergency stops through multiple training [18].
In the process of identifying whether athletes have a dangerous motion of frontal emergency stops, the average value of the multi-category cross entropy-loss function of all activity signals is extracted, and the objective function set as the dangerous activity of frontal emergency stops recognition after minimization is as
where M is the total amount of activity signals; D represents the total amount of activity types.
3.3.2 Frontal Emergency Stops Dangerous Activity Recognition
After completing the training of the deep transfer learning model, Use the depth transfer learning model to realize the frontal emergency stops dangerous activity recognition [19]. After the deep transfer learning model extracts the deep activity features of
(1) Extract the athletes’ safe activity signals and dangerous activity of frontal emergency stops signals in turn. Set to
(2) Set the deep transfer learning model after training as a feature extractor, and set thefeature vector output from the whole connection layer as the athletes’ activity recognition feature [20,21]. Input
(3) Calculate the Euclidean distance
(4) Through the nearest neighbor algorithm, extract the result with the lowest value in
(5) Execute steps (3) to (4) for many times, and use the depth transfer learning model from a perspective to identify whether athletes have a dangerous activity of frontal emergency stops.
(6) Execute steps (3) to (5) for many times, and use the depth transfer learning model from multiple perspectives to identify whether athletes have a dangerous activity of frontal emergency stops.
To sum up, the process of frontal emergency stops dangerous activity recognition model based on deep transfer learning is shown in Fig. 2.
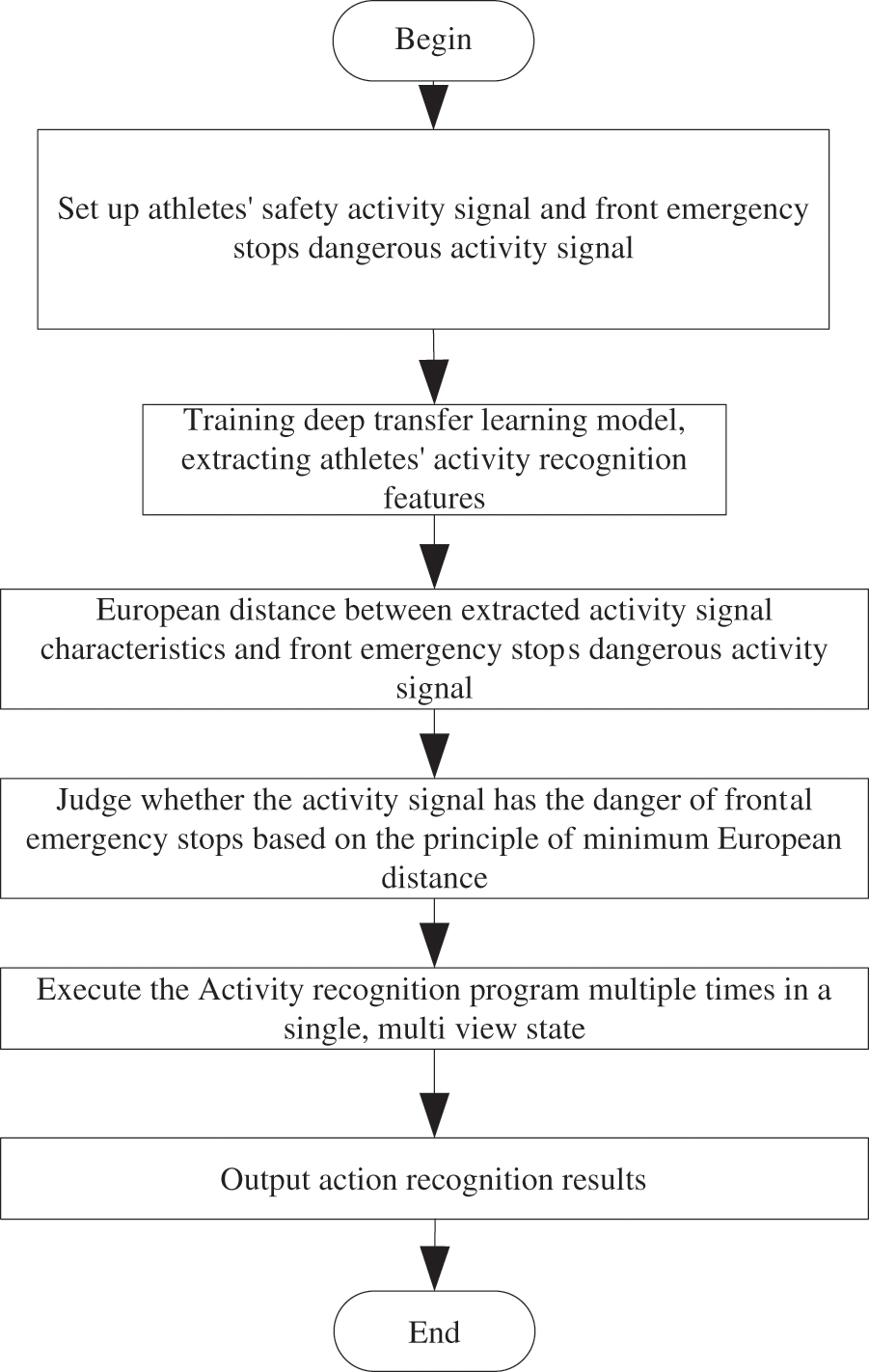
Figure 2: Recognition process of frontal emergency stops dangerous activities based on deep transfer
4 Experimental Analysis and Results
NBA data set: Comprehensive data of regular and postseason players, teams and coaches in NBA history in each season, and the salary data of each player in each season are attached (for reasons of NBA historical statistics, only the data of players in a single game after the 1985–1986 season are saved), The experimental dataset includes 153,548 video sequences. Football data set: A data set is constructed based on football match videos. Each video lasts about 40 min and contains 8 activity categories, including background, goal, corner kick, free kick, yellow card, red card, substitution, and a foul ball. The experimental data set includes 236 football match videos, 36,554 sequences.
To test the recognition effect of the algorithm in this paper on the frontal emergency stops activity, in the experiment, the activity images of 8 groups of athletes were randomly extracted from basketball sports dataset (dataset A) and football sports dataset (dataset B), totaling 5000 images. Which, four thousand were used for model training, and one thousand were used for experimental test analysis. Data sets A and B contain the average steals, average errors, and total scores of the host and guest teams in the last five games of basketball and football, which can be used for machine learning and deep learning to predict game results and scores. The period is from January 3, 2022 to May 23, 2022. To ensure the quality of experimental data, the data set selected is filtered and cleaned. A high pass filter is used to filter image noise, enhance image gray information, and enhance the quality of useful activity signals. To facilitate calculation, all image pixel values are normalized to [–1, 1]. When training the deep transfer learning model in this paper, the model parameters are set as follows: the batch size is set to 1, the model iterative training learning rate is set to 0.0001, and the attenuation weight is 0.
One group of activity data is extracted from dataset A, and two groups of activity data are extracted from dataset B as the recognition targets of the proposed algorithm. Based on the three groups of activity data extracted, the recognition effect of the proposed algorithm, the algorithm in IBRMV [5], the algorithm in SESMC [6], the algorithm in HAIMF [7], the algorithm in HMRDD [8], and the algorithm in HMRDR [9] on the dangerous activity of frontal emergency stop is tested. In the experiment, the acquisition effect, noise removal effect and stop the dangerous activity of frontal emergency recognition effect of the algorithm on the three dangerous activities of emergency stops signals are tested, as shown in Fig. 3.
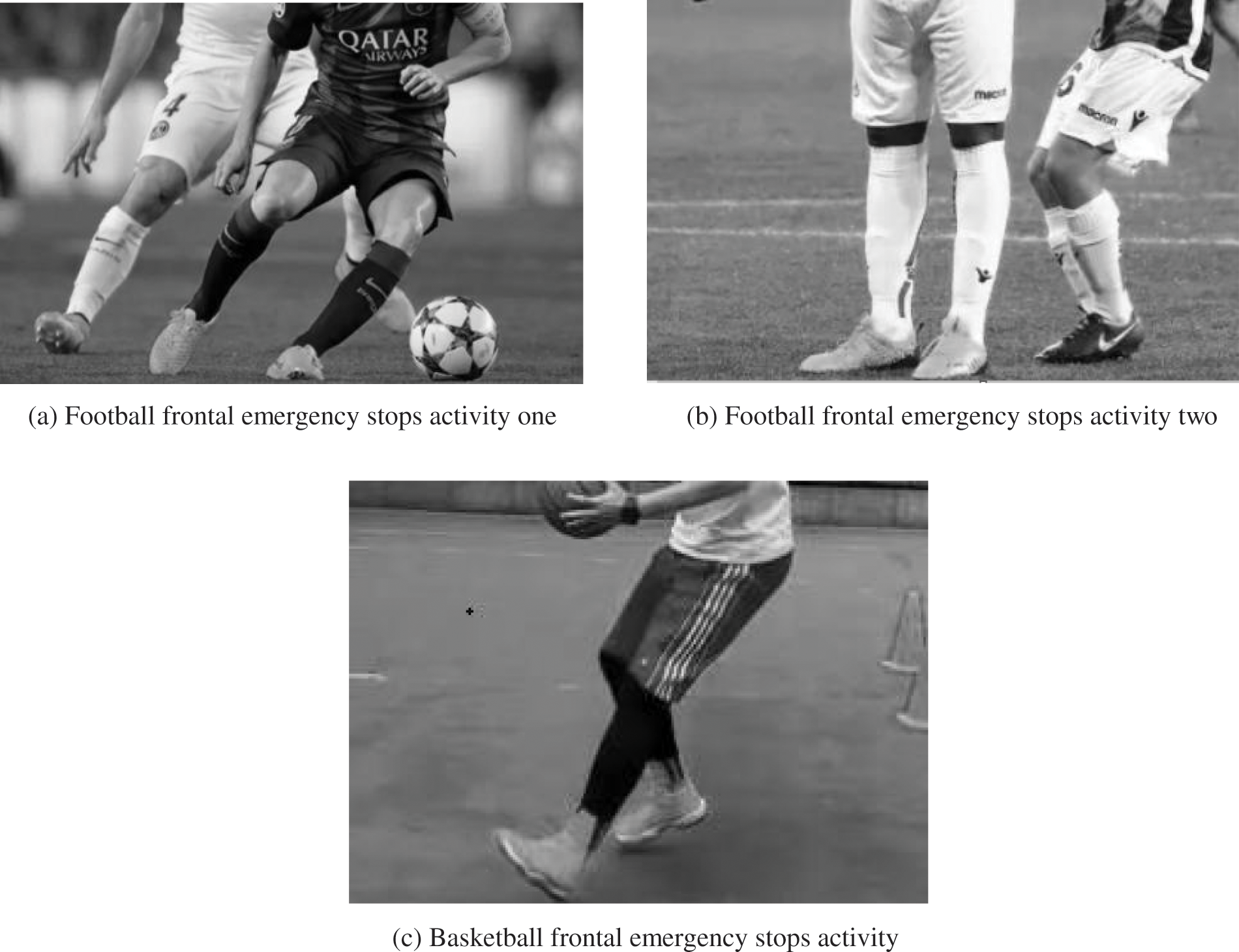
Figure 3: Dangerous activity type of frontal emergency stops
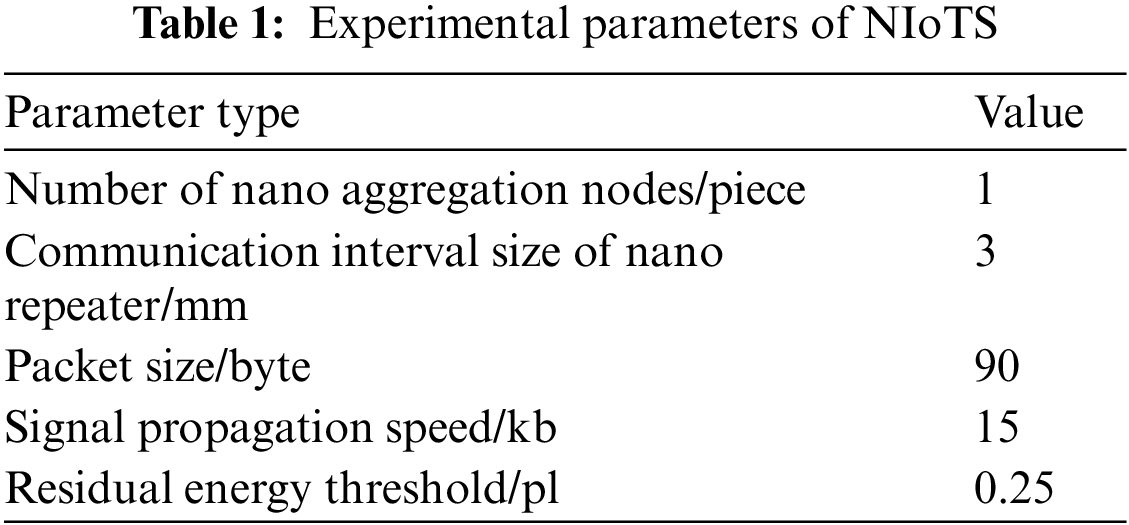
The experimental parameters of NIoTS are shown in Table 1.
To test the effect of the proposed algorithm and the five other algorithms on the acquisition of three kinds of dangerous activity of emergency stops signals, the proposed algorithm combines the athletes’ leg muscle structure conditions when fitting and installing the NIoTS, and uses the average network delay of the activity signals collected by the NIoTS as the index to analyze the real-time performance of the NIoTS on the acquisition of activity information.
The average delay is expressed as
where
To compare the signal de-noising effect of the proposed algorithm and the five other algorithms, the SNR is used as the test index. SNR can reflect the de-noising effect of activity signals. The greater the value, the better the de-noising effect.
where
MSE can reflect whether the amplitude of the activity signal after de-noising differs from that before de-noising. The smaller this value is, the smaller the distortion of the activity signal is.
The recognition variance as an indicator is calculated as follows.
where t represents the calculated recognition value. v is the average of the recognized values. n is the number of times of recognition.
The calculation formula for the indicator of the difference in recognition time of frontal emergency stops dangerous activity is as follows
where
The comparison results of the average delay between the proposed algorithm and the five comparison algorithms, as shown in Table 2.
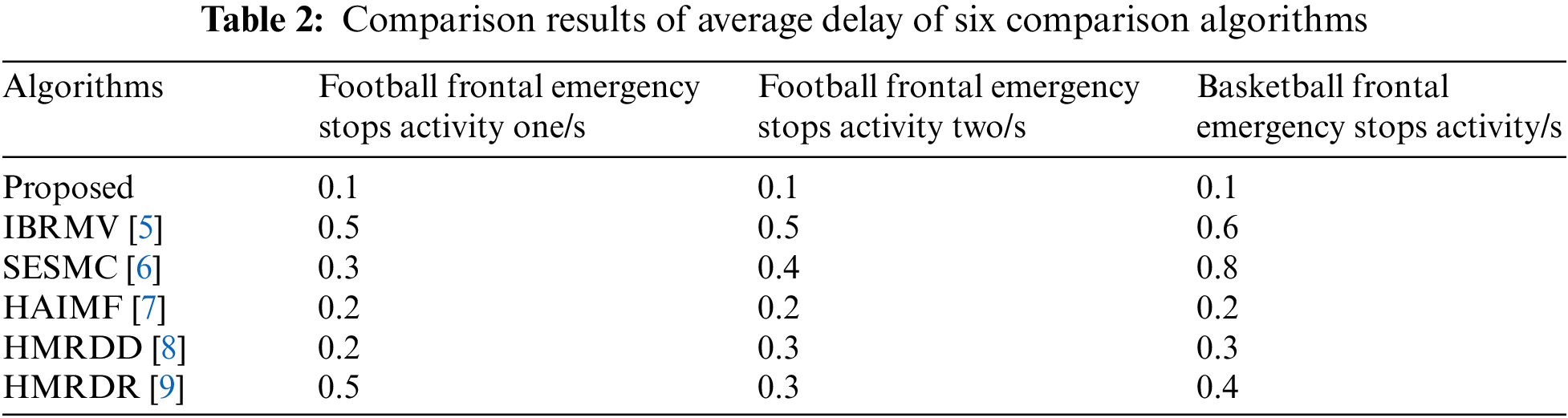
According to the data in Table 1. For football frontal emergency stops activity one, the average value of activity signal acquisition delay of the proposed algorithm is 0.1 s, which is 0.4, 0.2, 0.1, 0.1 and 0.4 s lower than that of the algorithms in IBRMV [5], SESMC [6], HAIMF [7], HMRDD [8] and HMRDR [9], respectively; For football frontal emergency stops activity two, the average value of activity signal acquisition time delay of the proposed algorithm is 0.1 s, which is 0.4, 0.3, 0.1, 0.2 and 0.2 s lower than the algorithms in IBRMV [5], SESMC [6], HAIMF [7], HMRDD [8] and HMRDR [9], respectively; For basketball frontal emergency stops the activity, the average time delay of activity signal acquisition of the proposed algorithm is 0.1 s, which is 0.5, 0.7, 0.1, 0.2 and 0.3 s lower than that of the algorithms in IBRMV [5], SESMC [6], HAIMF [7], HMRDD [8] and HMRDR [9], respectively. In general, when each algorithm collects the dangerous activity of frontal emergency stops signal, the comparison result of the average delay is apparent. The average delay of the proposed algorithm is the shortest, both being 0.1 s. This shows that the proposed algorithm has the most significant real-time performance in collecting the dangerous activity of frontal emergency stops signal, because the Nano-sensor used in this algorithm will set the number and position of Nano-collectors in combination with the specific conditions of athletes’ muscles, thus improving the efficiency of Nano-sensor in collecting activity signals.
The activity SNR of the proposed algorithm and the five comparison algorithms is shown in Fig. 4.
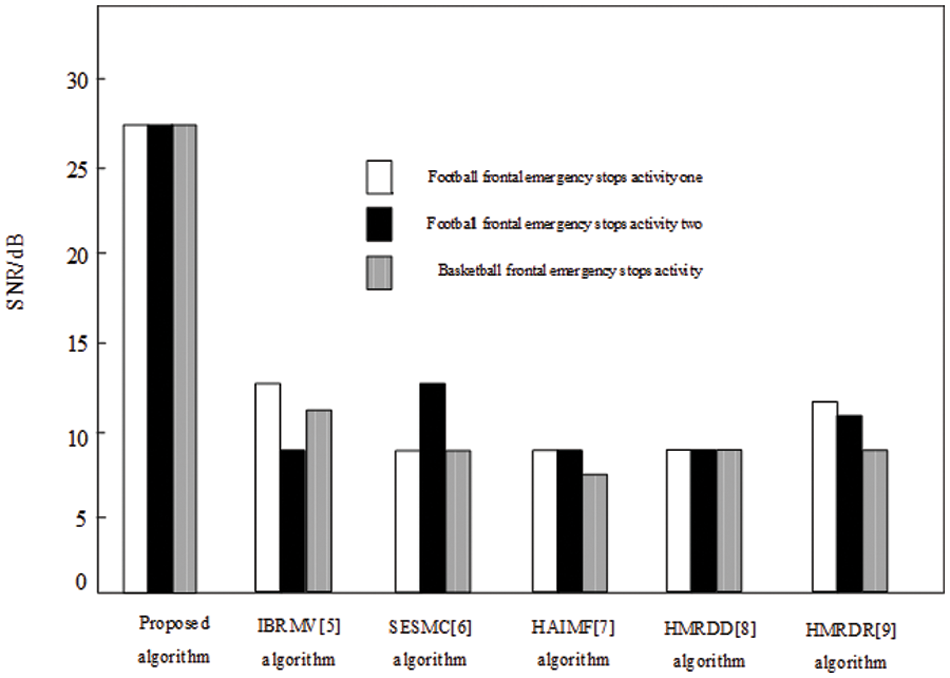
Figure 4: Comparison results of SNR
Analysis of the results in Fig. 4 shows that for football frontal emergency stops activity one, football frontal emergency stops activity two and basketball frontal emergency stops activity the activity SNR of the proposed algorithm reaches 27.5 dB. According to the data Fig. 4, it can be visualized that the algorithms of IBRMV [5], SESMC [6], HAIMF [7], HMRDD [8], and HMRDR [9] do not reach half of the SNR values of the proposed algorithms. In general, after each algorithm de-noises the dangerous activity of the frontal emergency stops signal, the activity signal SNR of the proposed algorithm after de-noising is the largest, up to 27.5 dB, and the activity signal de-noising effect is the best.
The MSE of the activity signal of the proposed algorithm and the five comparison algorithms is shown in Fig. 5.
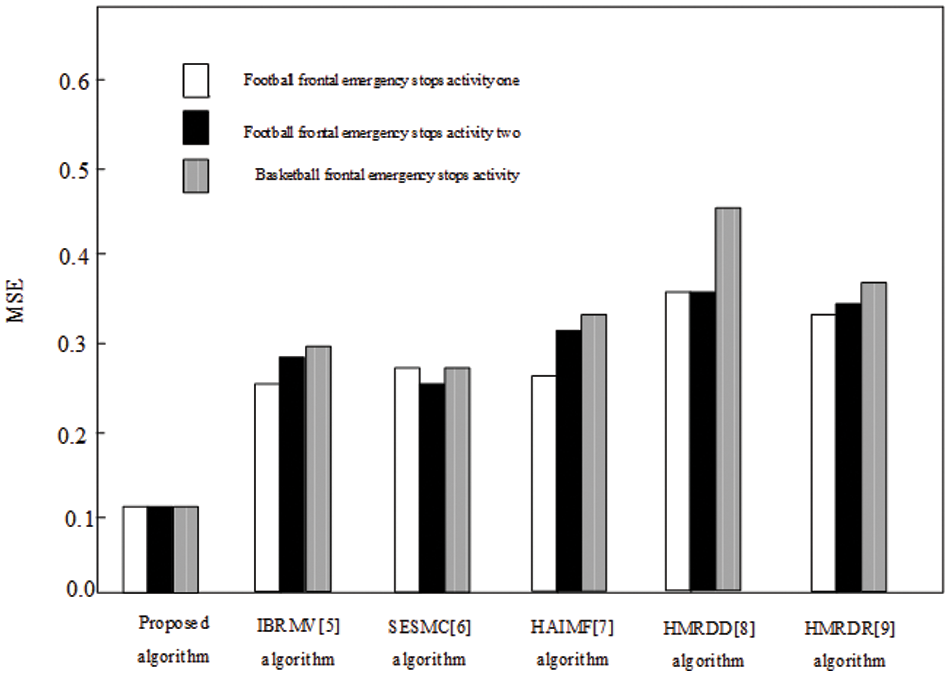
Figure 5: Comparison results of MSE
According to the analysis of Fig. 5. The MSE of the activity signal of the proposed algorithm is 0.12 for football frontal emergency stops activity one, football frontal emergency stops activity two and basketball frontal emergency stops activity. Compared with other algorithms, the MSE obtained from the test under the frontal rush stop activity of basketball is relatively large, especially up to 0.48 in the HMRDD [8]. The mean square error of the algorithms in the IBRMV [5], SESMC [6], HAIMF [7], and HMRDR [9] is relatively low, with error values distributed around 0.3. In general, after the de-noising of the frontal emergency stops hazard activity signal by each algorithm, the de-noised activity signal of this paper has the smallest MSE and the smallest probability of activity signal distortion, and the accuracy is higher.
Test the recognition effect of the proposed algorithm, the algorithm of IBRMV [5], the algorithm of SESMC [6], the algorithm of HAIMF [7], the algorithm of HMRDD [8], and the algorithm of HMRDR [9] on the frontal emergency stops the dangerous activity. The recognition variance is used as the test index to compare the recognition accuracy of the proposed algorithm with that of five algorithms. The results are shown in Fig. 6.
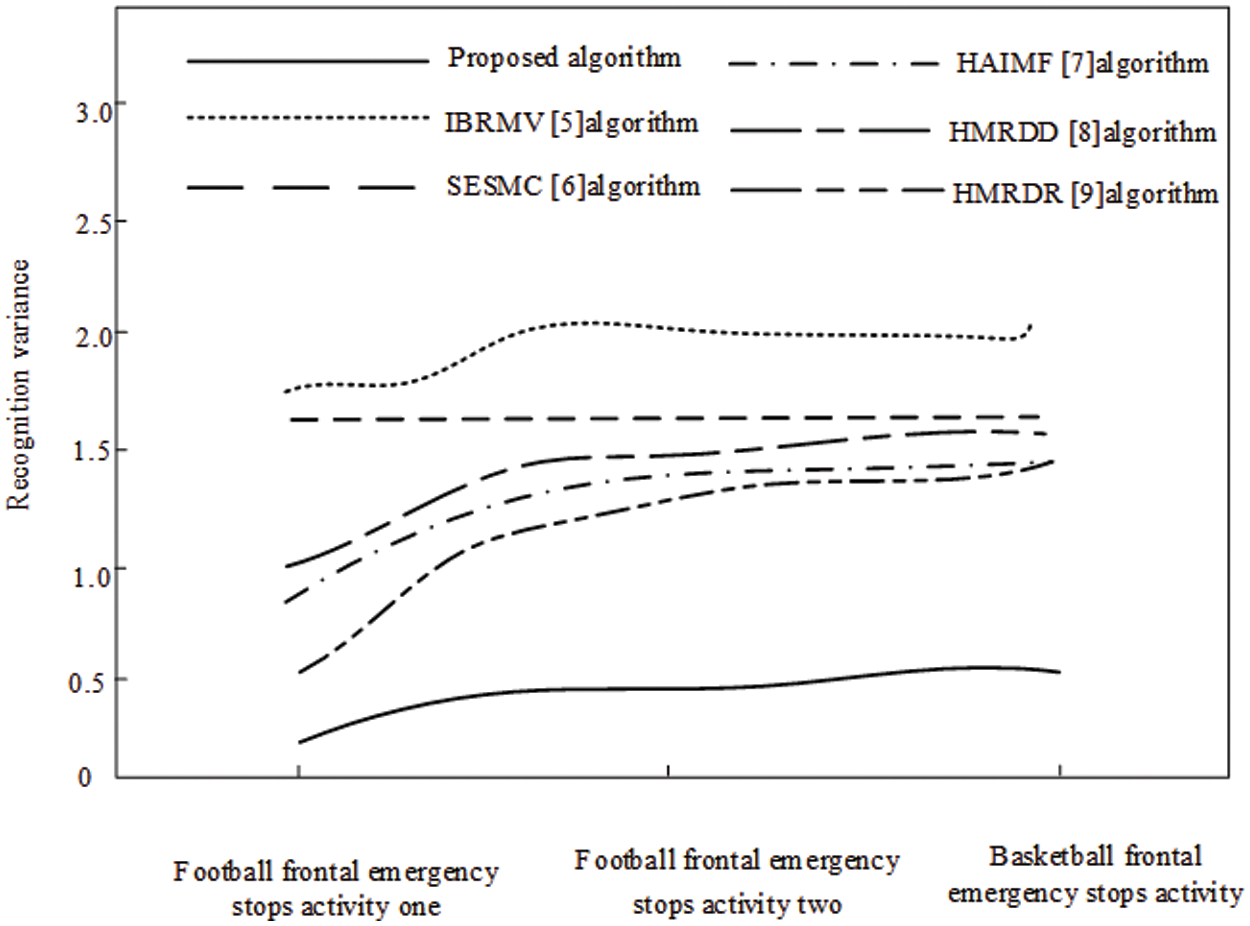
Figure 6: Comparison of recognition variance
The smaller variance indicates the more stable recognition effect of the algorithm. Analyzing the data in Fig. 6, it can be seen that the recognition variance of the proposed algorithm is always the smallest, not more than 0.5, for football frontal emergency stops activity one, football frontal emergency stops activity two and basketball frontal emergency stops activity. The recognition variance of the algorithms in SESMC [6], HAIMF [7], HMRDD [8] and HMRDR [9] are all between 0.5 and 1.5, and the recognition variance of the algorithm in IBRMV [5] is the largest, with the highest value exceeding 2.0. Comprehensively, after each algorithm recognizes the frontal emergency stops dangerous activity, the recognition variance of the proposed algorithm is the smallest, which indicates that the recognition accuracy of the proposed algorithm is higher.
According to the data in Fig. 7. This paper tests the recognition effect of different algorithms on dangerous activity recognition of frontal emergency stops, and compares the recognition efficiency of the proposed algorithm with that of the five comparison algorithms by taking the difference between the occurrence time of dangerous activity and the recognition time as the test index, as shown in Fig. 7. For three kinds of dangerous activity of emergency stops, the difference between the dangerous activity occurrence time and the recognition time of the proposed algorithm is 0.15 s, which is 0.67, 0.45, 0.25, 0.25 and 0.05 s lower than that of the algorithm in IBRMV [5], the algorithm in SESMC [6], the algorithm in HAIMF [7], the algorithm in HMRDD [8], and the algorithm in HMRDR [9], respectively; for frontal emergency stops in basketball, the difference between the occurrence time of dangerous activity and the recognition time of this algorithm is 0.15 s, which is 0.45, 0.45, 0.07, 0.15 and 0.15 s lower than that of the algorithm in IBRMV [5], the algorithm in SESMC [6], the algorithm in HAIMF [7], the algorithm in HMRDD [8] and the algorithm in HMRDR [9], respectively. In general, the difference between the occurrence time of dangerous activities and the recognition time of the proposed algorithm is 0.1 s, the smallest difference. It can be proved that the proposed algorithm has the best recognition effect on multiple dangerous activities of frontal emergency stops.
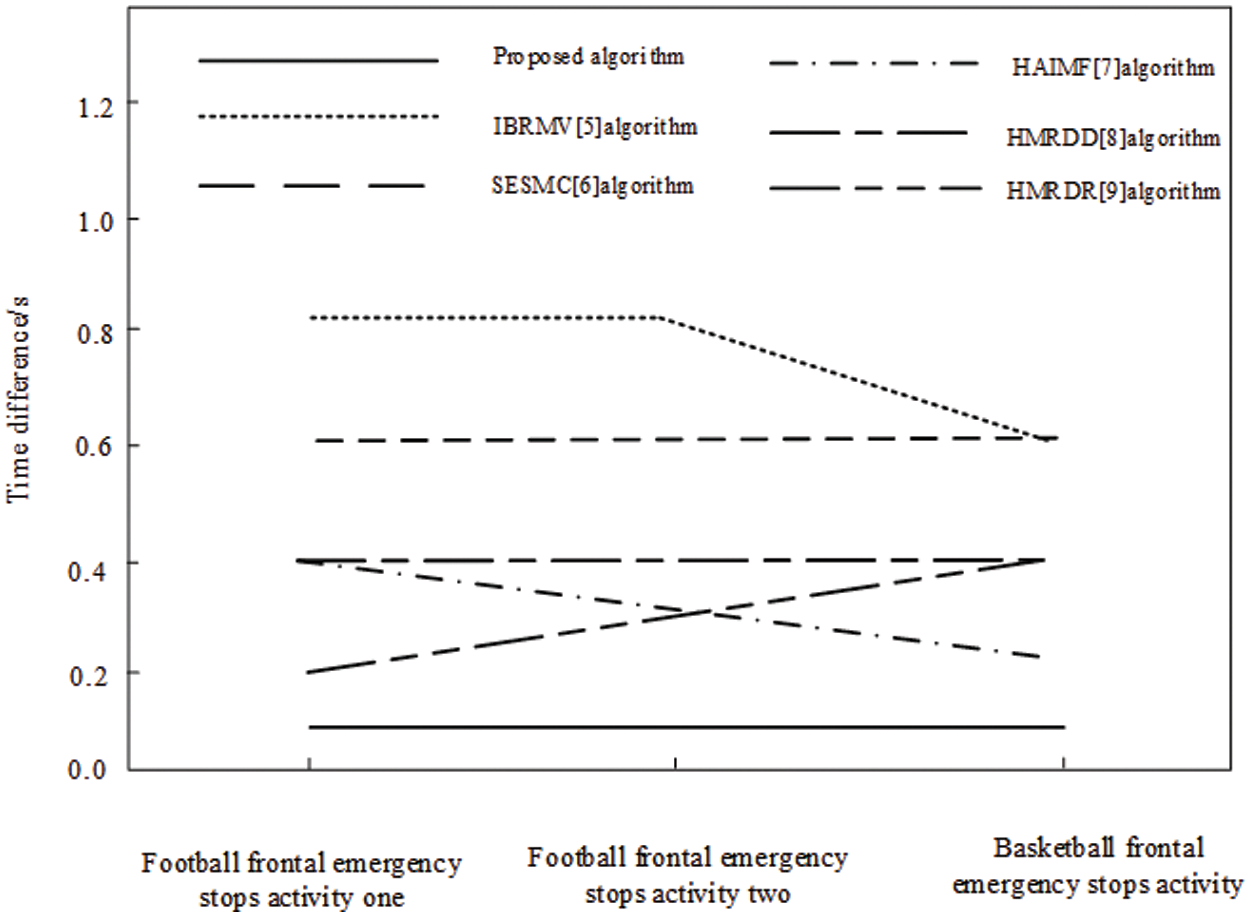
Figure 7: Comparison of the difference between the occurrence time and recognition time of dangerous activities
Aiming at the dangerous activity recognition of frontal emergency stops, a dangerous activity recognition of frontal emergency stops algorithm based on NIoTS and transfer learning is proposed. The algorithm mainly solves three problems of athletes’ activity signal acquisition, signal de-noising and signal danger recognition. The experimental results show that the average time delay of activity signal acquisition of this algorithm is 0.1 s, the SNR of activity signal is 27.5 dB, and the MSE of the activity signal is 0.12. The recognition variance of frontal emergency stops dangerous activities s shall not exceed 0.5, and the difference between the occurrence time of dangerous activity and the recognition time is 0.15 s. However, the data used in this paper only involved basketball and football, and the scientificity and reliability of the experimental results declined slightly. Therefore, in future research, more data sets will be introduced for testing, and their specific application performance will be gradually improved in the actual dangerous activity recognition of frontal emergency stops test.
Funding Statement: The authors received no funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. H. L. Luo, F. Lu and Y. Yan, “Action recognition based on multi-model voting with cross layer fusion,” Journal of Electronics & Information Technology, vol. 41, no. 3, pp. 649–655, 2019. [Google Scholar]
2. Y. T. Zhang, X. P. Zhai and H. Nie, “Deep learning method for action recognition based on low resolution infrared sensors,” Infrared Technology, vol. 44, no. 3, pp. 286–293, 2022. [Google Scholar]
3. S. Nasrin, A. Shylendra, N. Darabi, T. Tulabandhula, W. Gomes et al., “ENOS: Energy-aware network operator search in deep neural networks,” IEEE Access, vol. 10, pp. 81447–81457, 2022. [Google Scholar]
4. N. Nejatishahidin, P. Fayyazsanavi and J. Košecka, “Object pose estimation using mid-level visual representations,” in 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Kyoto, Japan,pp. 13105–13111, 2022. [Google Scholar]
5. L. M. Xia, W. T. Guo and H. Wang, “Interaction behavior recognition from multiple views,” Journal of Central South University, vol. 27, no. 1, pp. 101–113, 2020. [Google Scholar]
6. L. Chen, X. Liu, B. Xuan, J. Zhang and Y. Zhang, “Selection of EMG sensors based on motion coordinated analysis,” Sensors, vol. 21, no. 4, pp. 1147, 2021. [Google Scholar] [PubMed]
7. B. A. Zhuo, B. Who, “Human action identification by a quality-guided fusion of multi-model feature,” Future Generation Computer Systems, vol. 116, no. 1, pp. 13–21, 2021. [Google Scholar]
8. M. Murakami, J. K. Tan, H. Kim and S. Ishikawa, “Human motion recognition using directional motion history images,” Proceedings of International Conference on Artificial Life and Robotics, vol. 25, no. 1, pp. 779–782, 2020. [Google Scholar]
9. H. L. Yang, M. Z. Huang and Z. Q. Cai, “Research on human motion recognition based on data redundancy technology,” Complexity, vol. 15, no. 4, pp. 1–6, 2021. [Google Scholar]
10. D. Zheng, Y. Zhang and Z. Xiao, “Deep learning-driven Gaussian modeling and improved motion detection algorithm of the three-frame difference method,” Mobile Information Systems, vol. 2021, no. 15, pp. 1–7, 2021. [Google Scholar]
11. L. Liu, X. Lei, B. Chen and L. Shu, “Human action recognition based on inertial sensors and complexity classification,” Journal of Information Technology Research, vol. 12, no. 1, pp. 18–35, 2019. [Google Scholar]
12. R. Huang and M. Sun, “Network algorithm real-time depth image 3d kuman recognition for augmented reality,” Journal of Real-Time Image Processing, vol. 18, no. 2, pp. 307–319, 2021. [Google Scholar]
13. S. Z. Gurbuz and M. G. Amin, “Radar-based human-motion recognition with deep learning: Promising applications for indoor monitoring,” IEEE Signal Processing Magazine, vol. 36, no. 4, pp. 16–28, 2019. [Google Scholar]
14. S. B. Reed, T. Reed and S. M. Dascalu, “Spatiotemporal recursive hyperspheric classification with an application to dynamic gesture recognition,” Artificial Intelligence, vol. 270, no. 5, pp. 41–66, 2019. [Google Scholar]
15. Y. Gu, M. Liu, W. Sheng, Y. S. Ou and Y. G. Li, “Sensor fusion based manipulative action recognition,” Autonomous Robots, vol. 45, no. 3, pp. 1–13, 2021. [Google Scholar]
16. H. Yin, J. Wang and J. Lin, “A Memory-attention hierarchical model for driving-behavior recognition and motion prediction,” International Journal of Automotive Technology, vol. 22, no. 4, pp. 895–908, 2021. [Google Scholar]
17. S. Bai and F. Han, “Tourist behavior recognition through scenic spot image retrieval based on image processing,” Traitement Du Signal, vol. 37, no. 4, pp. 619–626, 2020. [Google Scholar]
18. S. Shimada, V. Golyanik, W. Xu, P. Patrick and T. Christian, “Neural monocular 3d human motion capture with physical awareness,” ACM Transactions on Graphics, vol. 40, no. 4, pp. 1–15, 2021. [Google Scholar]
19. X. M. Ma and X. F. Li, “Dynamic gesture contour feature extraction method using residual network transfer learning,” Wireless Communications and Mobile Computing, vol. 2021, pp. 1503325, 2021. [Google Scholar]
20. L. Tong, R. Liu and L. Peng, “LSTM-Based lower limbs motion reconstruction using low-dimensional input of inertial motion capture system,” IEEE Sensors Journal, vol. 20, no. 7, pp. 3667–3677, 2020. [Google Scholar]
21. J. Emily, A. Bethell, K. B. Wasiq and H. B. C. Abir, “A deep transfer learning model for head pose estimation in rhesus macaques during cognitive tasks: Towards a nonrestraint noninvasive 3Rs approach,” Applied Animal Behaviour Science, vol. 16, no. 1, pp. 105708–105729, 2022. [Google Scholar]
22. T. Yu, J. Zhao, Y. Huang, Y. Li and Y. Liu, “Towards robust and accurate single-view fast human motion capture,” IEEE Access, vol. 7, pp. 85548–85559, 2019. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools