
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Circular Formation Control with Collision Avoidance Based on Probabilistic Position
1 Department of Applied Mathematics, School of Science, Nanjing University of Science and Technology, Nanjing, 210094, China
2 School of Automation, Guangxi University of Science and Technology, Liuzhou, 545006, China
* Corresponding Author: Muhammad Shamrooz Aslam. Email:
Intelligent Automation & Soft Computing 2023, 37(1), 321-341. https://doi.org/10.32604/iasc.2023.036786
Received 12 October 2022; Accepted 06 January 2023; Issue published 29 April 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In this paper, we study the circular formation problem for the second-order multi-agent systems in a plane, in which the agents maintain a circular formation based on a probabilistic position. A distributed hybrid control protocol based on a probabilistic position is designed to achieve circular formation stabilization and consensus. In the current framework, the mobile agents follow the following rules: 1) the agent must follow a circular trajectory; 2) all the agents in the same circular trajectory must have the same direction. The formation control objective includes two parts: 1) drive all the agents to the circular formation; 2) avoid a collision. Based on Lyapunov methods, convergence and stability of the proposed circular formation protocol are provided. Due to limitations in collision avoidance, we extend the results to LaSalle’s invariance principle. Some theoretical examples and numerical simulations show the effectiveness of the proposed scheme.Keywords
Owing to the current technological development/progress in computation and communication, distributed cooperative control of multi-agent systems (MASs) has received enormous attention from research communities in recent years. Its practical applications include search mechanisms, navigation, map manipulation, target interception, and tracking [1–4]. The main objective of cooperative control theory is to develop and design a protocol that guarantees the synchronization of a group of neighboring agents via local information exchange. Literature studies present different phenomena in cooperative control, such as consensus [5,6], formation control [7], and containment control [8].
Formation control is one of the fundamental research problems in distributed cooperative control of MASs that has presented wide application prospects, such as unmanned aerial vehicles (UAVs) [9], unmanned ground vehicles (UGVs) [10], autonomous underwater vehicles (AUVs) [11], coordination control of satellites [12], etc. In general, formation control aims to design a distributed control protocol that leads the state/output of the agent to maintain an expected shape. The formation control problem has been investigated using different control techniques in recent years. Based on [13], the techniques are classified into three strategies, namely, distance-based [14], displacement-based [15], and bearing-based [16] strategies. The consensus-based techniques are used to address the formation control problems in [17,18]. In [19], the adaptive control design is introduced to address the formation tracking problem of multiple mobile robots with unknown skidding and slipping environments. The distributed formation control problems are addressed in [20] by using an event-triggered mechanism. Based on multiple Euler-Lagrange functions, the authors in [21] investigated
Among the challenging problems proposed in the formation control of MASs, the circular formation becomes a hot subject of interest because of its manifold applications, such as source-seeking exploration [24], surveillance [25], and sensor networks [26]. Circular formation control is to drive a group of agents to converge to or move on a defined circular trajectory with spacing adjustment between the neighboring agents [27]. Up to now, scholars are progressively adopting innovative research strategies and measurements to investigate the circular formation control problem of MASs. Several methodologies have been proposed to deal with the circular formation control problem, including the leader-follower technique [28], the cyclic pursuit technique [29], the behavioral technique [30], and the virtual structure technique [31]. In [32], authors developed a circular motion control law and phase-distributed protocol to achieve a circular formation for any preset relative phase. In [33,34], distributed control protocols are designed to solve the circle-forming problem of a group of anonymous agents. The circular formation stabilization of networked dynamic unicycles is considered in [35], where a distributed dynamic protocol is developed for each unicycle. Interested readers are referred to the survey paper [36] for a comprehensive review of the techniques and methodologies in circular formation control of MASs.
From a practical perspective, collision avoidance is one of the fundamental and challenging problems in formation control. A collision avoidance strategy is developed for multiple UAVs in formation flight to avoid collisions and obstacles [37]. In [38], formation tracking control with collision avoidance problem is addressed for nonlinear MASs by adopting the artificial potential approach with the neural networks technique. A novel control scheme based on adaptive neural networks is designed for a class of second-order nonlinear MASs to solve the formation control problem with multiple tasks, including obstacle avoidance, collision avoidance, and connectivity maintenance [39].
Although considerable research efforts devoted to the circular formation control problem, most of the existing results consider the single-integrator model [28,33,40], and only a few works have considered collision avoidance. Thus, it is of practical significance to study more realistic models, such as models that capture UAV systems. In this work, the circular formation problem has a wide array of practical potential applications in engineering. It has applications in the defense industry to provide surveillance and navigation of a particular area within a defined radius. It has applications in escorting and patrolling tasks of multi-robots, such as UAVs patrolling borders [41]. These facts motivate us to develop a novel distributed control scheme to achieve circular formation and meet practical challenges.
Motivated by the aforegoing observation, the problem of circular formation for the second-order MASs based on a probabilistic position is addressed in this paper. The mobile agents are required to follow a circular trajectory such that the agents in the circular trajectory must have the same direction. Compared to the existing circular formation control techniques [28,42], the leader-follower strategy and probabilistic position are combined to solve the circular formation problem, which significantly enhances the flexibility and stability of the system. The main difficulty in this paper is caused by the fact that the agents may get a tangential path after getting in a circular trajectory. By using the Lyapunov methods, convergence analysis of the designed circular formation control protocol is provided. The main contributions of this work are as follows. First, unlike [33,40], this paper considers the circular formation of second-order MASs, which makes this work more application-oriented. The second-order systems can be used to model many real systems, such as unicycle dynamics (after dynamic feedback linearization) or quadrotor UAV simplified dynamics. Second, by introducing a probabilistic position control law, a novel distributed control protocol is proposed to achieve circular formation, which is different from [43]. The probabilistic position law is proposed to represent the probabilistic position of each agent in the circular trajectory. It is shown that under the proposed control scheme the agents move along the circular trajectory of the desired radius and also avoid the tangential path. Third, the proposed control strategy guarantees inter-agent collision avoidance.
The rest of the paper is organized as follows. Section 2 represents notations and preliminaries. Section 3 formulates the circular formation problem and presents the controller design. Section 4 discusses the main results. Finally, Section 5 presents simulation results and Section 6 summarizes the conclusions of the study.
Throughout this paper, let
In MASs, the interaction topology is represented by a graph [44]. A graph
Definition 1 (Laplacian). The Laplacian matrix is given as
where the adjacency matrix is defined by
We consider a group of
where
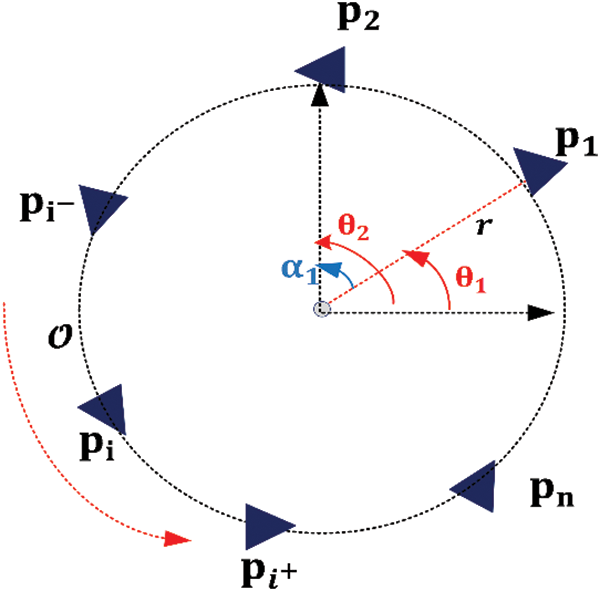
Figure 1: The desired circular formation in a counterclockwise direction, maintaining circular distance and avoiding tangential movement
Definition 2. (Circular path). The agents move in a circular formation if
For a given desired radius vector of different circular trajectories
If
Definition 3. (Agents direction). The agent must have the same direction of motion
Definition 4. (Collision avoidance condition). For given desired
and constant.
Definition 5. (Problem definition). For a given n
To achieve this objective, let us assume that:
• All the agents must move in one direction with the same constant angular velocity in the same orbit.
• There exist a constant distance between agents to avoid collisions, the distance between agents is rotational in the same circle as well as different circles.
• Each agent knows its initial velocities
• The position of each agent is presumed, because of its circular trajectory.
• The dynamics of followers (trajectory and uncertainty) are stabilizable which means that the pair
The probabilistic position law of each dynamic agent along circular trajectories modeled by the system Eq. (1) can be designed as
Lemma 1. [44] Let
1.
2. If
Lemma 2. (Young’s Inequality, [45]). If
Lemma 3. [46] Under a time-invariant information exchange topology, the continuous-time protocol achieves consensus asymptotically if and only if the information exchange topology has a spanning tree.
Lemma 4. Consider the multi-agent system (1). The system uncertainties are supposed as:
i. Agents not maintaining a circular path,
ii. Agents may get a tangential path after getting in a circular trajectory, getting a
Proof.
i. Agents not maintaining a circular path is a contradiction to Definition 2, which will affect formation. Let’s consider
ii. While getting a tangential trajectory is a contradiction to Definition 2. We have
Remark 1. Each dynamic agent must follow the circular trajectory in the same radius and avoid the tangential path.
Theorem 1. Consider the multi-agent system (1). The control law generated by the probabilistic position is designed as
such that
Proof. For the multi-agent system (1), the controller is designed as follows [6]:
in our paper,
such that
The desired trajectory is described as follows
The error can be calculated as
By solving the Lyapunov equation
The matrix P is positive semi-definite if and only if
Remark 2. Theorem 1 leads to the contradiction that
4.1 Virtual Leader-Follower Strategy
In this subsection, the virtual leader-follower strategy is designed to deal with the system uncertainties where each follower agent tracks the virtual leader dynamics. A distributed hybrid control law is designed to ensure the formation control stabilization and consensus in presence of the uncertain trajectory with tracking error converging to zero.
Lemma 5. The dynamic of the virtual leader follows a desired circular trajectory defined as
where
where
Proof. The distributed formation stabilization controller can be designed as
and the consensus controller is proposed as follows
By adding the two controllers Eqs. (8) and (9), a distributed hybrid controller is given by
which is equivalent to
For
Eq. (11) can be also written in a vector form as
where
Remark 3. Under the proposed control scheme, inter-agent collision avoidance is guaranteed under the following assumptions:
a) All the agents move in a counterclockwise direction, i.e., orientation with constant velocity.
b) There exist a positive or constant relative distance between the agents, i.e.,
Lemma 6. Consider a graph
where
and
Proof. Let
for
for
where J is the Jordan matrix given as
such that
where
which completes the case for a directed spanning tree.
Remark 4. In the circular orbit, we have an infinite set of points for the tangential trajectory. Let’s define
From Remark 4, for every
for
To show the stability of the system, consider the Lyapunov function
It is easy to check that
by using Young’s inequality, for each
We take
Thus, for
For every
Case 1: when
Differentiating V2 yields
Case 2: when
Taking the derivative of
by using Young’s inequality, we have
for
We conclude that the system is stable, and the error will converge to zero. We write the system Eq. (1) in generalized form as
where
The feedback control gain k is given by
Since,
Lemma 7. Lyapunov candidate (potential function) is the error in the dynamical system Eq. (14) given as
Proof.
We have
Applying Young’s inequality, we obtain
If
The system error is given as
The system can be written as
such that
Consider candidate Lyapunov function as
Calculating the derivative of V, we get
Thus, we have
for
Since the graph
for a connected graph to solve the Riccati equation. For
Theorem 2. Consider the multi-agent system (1). The dynamic control law Eq. (12) under assumptions solves the circular formation control problem.
Proof. Appendix A.
Remark 5. Theorem 2 leads to a contradiction with the Assumptions proposed. Since the virtual leader velocity may not be constant (changing velocity) the agents may maintain circular trajectories but with weak collision avoidance between interacting agents.
4.2 An Extension to Lasalle’s Invariance Principle
In this subsection, the results are extended to LaSalle’s invariance principle due to the limitations of the virtual leader-follower strategy Theorem 2. Consider a function
• For
• For
For this Lyapunov strict function, we use the LaSalle principle. LaSalle will make sure that the function with
We have
Since
Theorem 3. The dynamic control law solves the circular formation control problem for
Proof. We consider the following system
where the vector
In the same way, we get
Thus, by substituting Eq. (18) into (18), we obtain
where
We analyze two cases: If
Remark 6. In the current system, the probability value has a fundamental rule in making the follower agents follow the circular trajectory.
Let
The function
Since
This section presents the simulation of three agents (
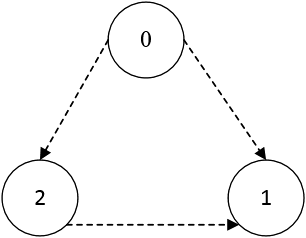
Figure 2: Graph interaction topology of two follower agents with a virtual leader in the same radius
Fig. 3 shows the trajectories of the agents uer control law (5).
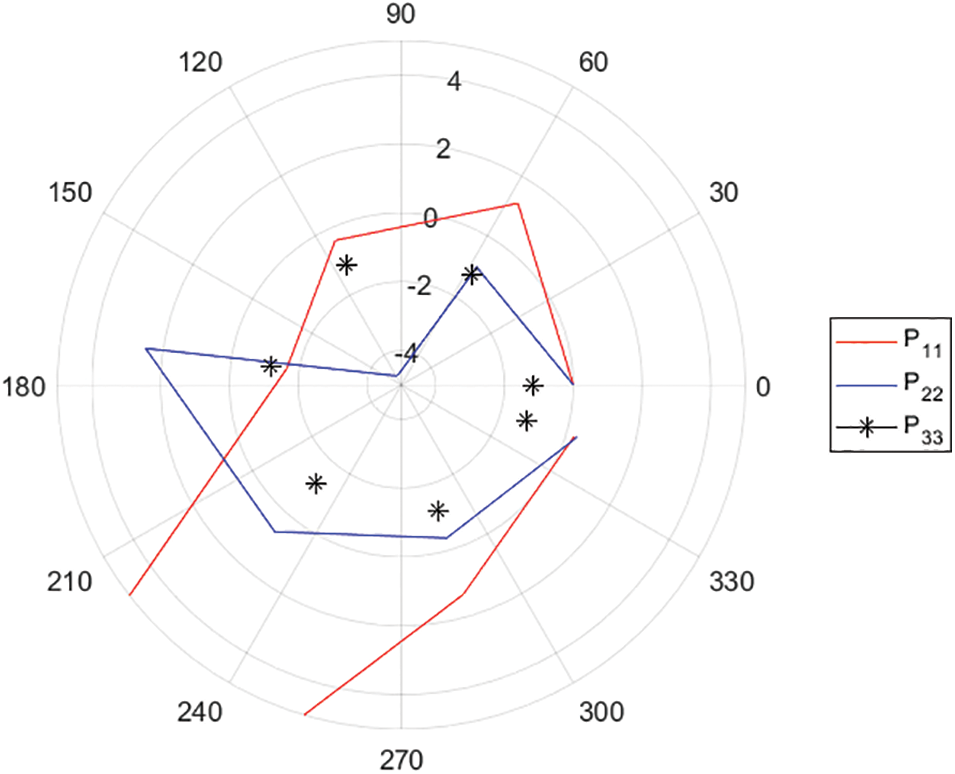
Figure 3: The trajectories of
Fig. 4 shows the different positions of agent i along the same circular trajectory in the plane under the proposed control protocol. It is shown that when the agent moves the tangential path is controlled but the agents can have different circular trajectories. The designed controller protocol ensures that the agents follow desired circular trajectory and avoid the tangential paths.
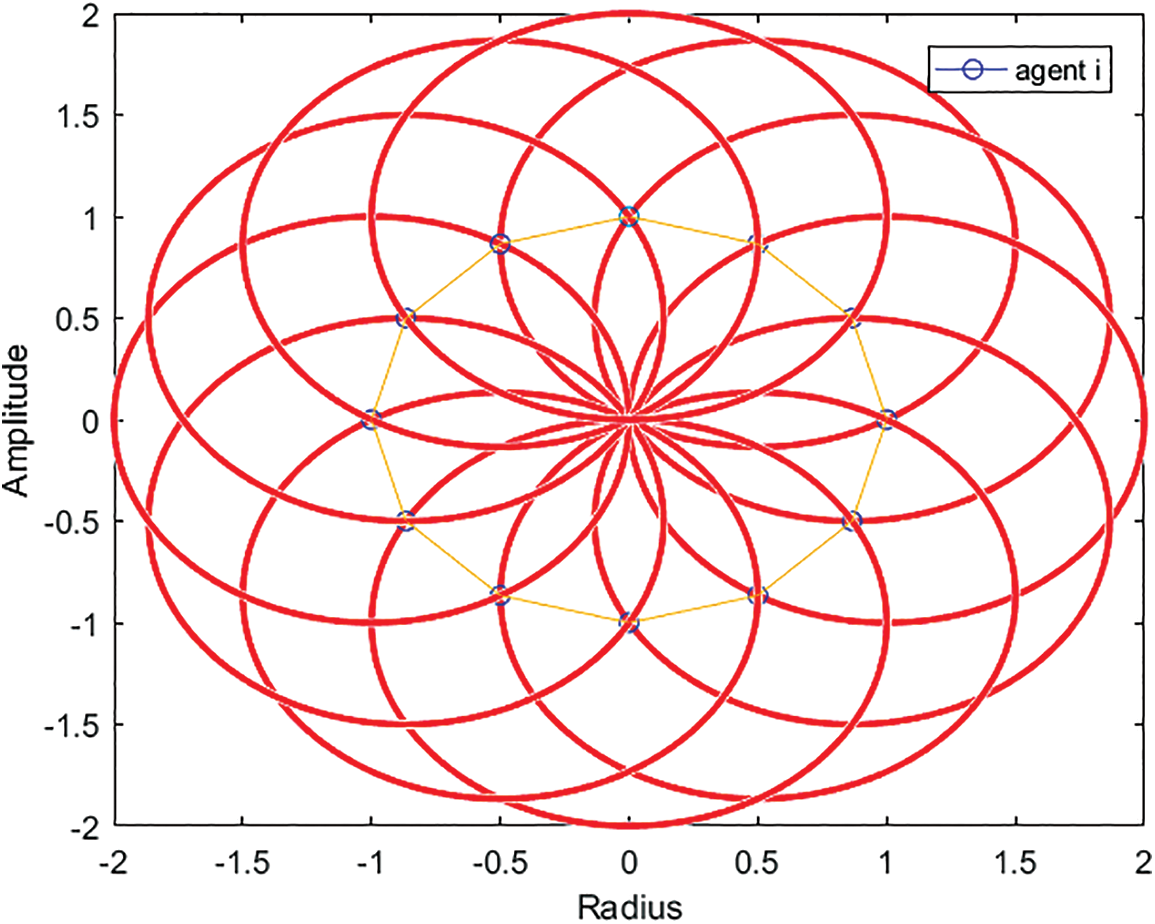
Figure 4: The different positions of the agent in the same circular trajectory under the control law
In the simulation, we consider a system consisting of three agents (

Figure 5: The circular formation trajectories of agents in the plane
The simulation results indicate clearly that the proposed control scheme solves the circular formation problem while no collision occurs among agents.
In this paper, a novel formation control scheme is introduced to study the circular formation problem for second-order MASs in the plane. The problem has two sub-objectives: circular formation control and collision avoidance. First, by combining probabilistic position law with a leader-follower strategy, a novel distributed control protocol is developed to achieve circular formation. It is proved that under the developed control scheme all the agents achieve a circular formation with the desired radius and also avoid the tangential path. Under the proposed control protocol, inter-agent collision avoidance is guaranteed by keeping the same counterclockwise direction of the agents with constant velocity and preserving a positive or constant distance between any two agents. Based on Lyapunov methods, the stability analysis of the designed circular formation scheme is provided. The effectiveness of the proposed control strategy is illustrated in the numerical simulations. Future works will focus on extending the proposed technique to MASs with more realistic dynamics. Moreover, how to achieve circular formation in different circular radii is an open and challenging research topic that needs investigation.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. R. W. Beard, T. W. McLain, M. A. Goodrich and E. P. Anderson, “Coordinated target assignment and intercept for unmanned air vehicles, ” IEEE Transactions on Robotics and Automation, vol. 18, no. 6, pp. 911–922, 2002. [Google Scholar]
2. R. W. Beard and T. W. McLain, “Multiple UAV cooperative search under collision avoidance and limited range communication constraints,” in Proc. 42nd IEEE Int. Conf. on Decis. and Control, Maui, HI, USA, pp. 25–30, 2003. [Google Scholar]
3. M. Di Marco, A. Garulli and A. Vicino, “Simultaneous localization and map building for a team of cooperating robots: A set membership approach,” IEEE Transactions on Robotics and Automation, vol. 19, no. 2, pp. 238–249, 2003. [Google Scholar]
4. T. G. Sugar and V. Kumar, “Control of cooperating mobile manipulators,” IEEE Transactions on Robotics and Automation, vol. 18, no. 1, pp. 94–103, 2002. [Google Scholar]
5. R. Olfati-Saber, J. A. Fax and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,” Proceedings of the IEEE, vol. 95, no. 1, pp. 2015–233, 2007. [Google Scholar]
6. W. Ren, “On consensus algorithms for double-integrator dynamics,”IEEE Transactions on Automatic Control, vol. 53, no. 6, pp. 1503–1509, 2008. [Google Scholar]
7. X. Dong, Y. Zhou, Z. Ren and Y. Zhong, “Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying,”IEEE Transactions on Industrial Electronics, vol. 64, no. 6, pp. 5014–5024, 2017. [Google Scholar]
8. J. Qin, W. X. Zheng, H. Gao, Q. Maand and W. Fu, “Containment control for second-order multiagent systems communicating over heterogeneous networks,” IEEE Transactions on Neural Networks and Learning Systems, vol. 28, no. 9, pp. 2143–2155, 2017. [Google Scholar] [PubMed]
9. Q. Li, Y. Hua, X. Dong and Z. Ren, “Time-varying formation tracking control for unmanned aerial vehicles: Theories and applications,” IFAC-PapersOnLine, vol. 55, no. 3, pp. 49–54, 2022. [Google Scholar]
10. C. Wang, H. Tnunay, Z. Zuo, B. Lennox and Z. Ding, “Fixed-time formation control of multirobot systems: Design and experiments,” IEEE Transactions on Industrial Electronics, vol. 66, no. 8, pp. 6292–6301, 2018. [Google Scholar]
11. H. Yu, Z. Zeng and C. Guo, “Coordinated formation control of discrete-time autonomous underwater vehicles under alterable communication topology with time-varying delay,” Journal of Marine Science and Engineering, vol. 10, no. 6, pp. 712, 2022. [Google Scholar]
12. H. Liu, Z. Chen, X. Wang and Z. Sun, “Optimal formation control for multiple rotation-translation coupled satellites using reinforcement learning,” Acta Astronautica, 2022. https://doi.org/10.1016/j.actaastro.2022.09.049 [Google Scholar] [CrossRef]
13. K. K. Oh, M. C. Park and H. S. Ahn, “A survey of multi-agent formation control,” Automatica, vol. 53, pp. 424–440, 2015. [Google Scholar]
14. L. Krick, M. E. Broucke and B. A. Francis, “Stabilisation of infinitesimally rigid formations of multi-robot networks,” International Journal of Control, vol. 82, no. 3, pp. 423–439, 2009. [Google Scholar]
15. X. Dong and G. Hu, “Time-varying formation tracking for linear multiagent systems with multiple leaders,” IEEE Transactions on Automatic Control, vol. 62, no. 7, pp. 3658–3664, 2017. [Google Scholar]
16. S. Zhao and D. Zelazo, “Translational and scaling formation maneuver control via a bearing-based approach, ” IEEE Transactions on Control of Network Systems, vol. 4, no. 3, pp. 429–438, 2017. [Google Scholar]
17. W. Ren, “Consensus strategies for cooperative control of vehicle formations,” IET Control Theory & Applications, vol. 1, no. 2, pp. 505–512, 2007. [Google Scholar]
18. X. He and Z. Geng, “Consensus-based formation control for nonholonomic vehicles with parallel desired formations,” International Journal of Control, vol. 94, no. 2, pp. 507–520, 2021. [Google Scholar]
19. S. J. Yoo and B. S. Park, “Formation tracking control for a class of multiple mobile robots in the presence of unknown skidding and slipping,” IET Control Theory & Applications, vol. 7, no. 5, pp. 635–645, 2013. [Google Scholar]
20. X. Ge and Q. L. Han, “Distributed formation control of networked multi-agent systems using a dynamic event-triggered communication mechanism,” IEEE Transactions on Industrial Electronics, vol. 64, no. 10, pp. 8118–8127, 2017. [Google Scholar]
21. J. Huang, N. Zhou, R. Chen and W. Zhang, “H∞ formation control design for multiple euler-lagrange agents subjected to switching topologies,” in Proc. 11th Asian Control Conf. (ASCC), Gold Coast, QLD, Australia, pp. 2382–2386, 2017. [Google Scholar]
22. J. Shi, Y. Yang, J. Sun, X. He, D. Zhou et al., “Fault-tolerant formation control of non-linear multi-vehicle systems with application to quadrotors,” IET Control Theory & Applications, vol. 11, no. 17, pp. 3179–3190, 2017. [Google Scholar]
23. J. Zhu, G. Wen and B. Li, “Decentralized adaptive formation control based on sliding mode strategy for a class of second-order nonlinear unknown dynamic multi-agent systems,” International Journal of Adaptive Control and Signal Processing, vol. 36, no. 4, pp. 1045–58, 2022. [Google Scholar]
24. P. Ogren, E. Fiorelli and N. E. Leonard, “Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment,” IEEE Transactions on Automatic Control, vol. 49, no. 8, pp. 1292–1302, 2004. [Google Scholar]
25. Y. Liu, Z. Liu, J. Shi, G. Wu and C. Chen, “Optimization of base location and patrol routes for unmanned aerial vehicles in border intelligence, surveillance, and reconnaissance, Journal of Advanced Transportation, vol. 2019, pp. 1–13, 2019. [Google Scholar]
26. J. Hu, L. Xie and C. Zhang, “Energy-based multiple target localization and pursuit in mobile sensor networks,” IEEE Transactions on Instrumentation and Measurement, vol. 61, no. 1, pp. 212–220, 2012. [Google Scholar]
27. X. Yu and L. Liu, “Distributed circular formation control of ring-networked nonholonomic vehicles,” Automatica, vol. 68, pp. 92–99, 2016. [Google Scholar]
28. L. Zhao and D. Ma, “Circle formation control for multi-agent systems with a leader,” Control Theory and Technology, vol. 13, no. 1, pp. 82–88, 2015. [Google Scholar]
29. H. Yang and Y. Wang, “Cyclic pursuit-fuzzy PD control method for multi-agent formation control in 3D space,” International Journal of Fuzzy Systems, vol. 23, pp. 1904–1913, 2020. [Google Scholar]
30. Y. Hou and R. Allen, “Behaviour-based circle formation control simulation for cooperative uUVs,” IFAC Proceedings Volumes, vol. 41, no. 1, pp. 119–124, 2008. [Google Scholar]
31. A. Benzerrouk, L. Adouane and P. Martinet, “Stable navigation in formation for a multi-robot system based on a constrained virtual structure,” Robotics and Autonomous Systems, vol. 62, no. 12, pp. 1806–1815, 2014. [Google Scholar]
32. L. Jin, S. Yu and D. Ren, “Circular formation control of multiagent systems with any preset phase arrangement,” Journal of Control Science and Engineering, vol. 2018, pp. 1–11, 2018. [Google Scholar]
33. C. Wang, G. Xie and M. Cao, “Forming circle formations of anonymous mobile agents with order preservation,” IEEE Transactions on Automatic Control, vol. 58, no. 12, pp. 3248–3254, 2013. [Google Scholar]
34. I. Chatzigiannakis, M. Markou and S. Nikoletseas, “Distributed circle formation for anonymous oblivious robots,” in Proc. Int. Workshop on Experimental and Efficient Algorithms, Angra dos Reis, Brazil, pp. 159–174, 2004. [Google Scholar]
35. X. Yu, X. Xu, L. Liu and G. Feng, “Circular formation of networked dynamic unicycles by a distributed dynamic control law,” Automatica, vol. 89, pp. 1–7, 2018. [Google Scholar]
36. H. Litimein, Z. Y. Huang and A. Hamza, “A survey on techniques in the circular formation of multi-agent systems,” Electronics, vol. 10, no. 23, pp. 2959, 2021. [Google Scholar]
37. J. Seo, Y. Kim, S. Kim and A. Tsourdos, “Collision avoidance strategies for unmanned aerial vehicles in formation flight,” IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 6, pp. 2718–2734, 2017. [Google Scholar]
38. Q. Shi, T. Li, J. Li, C. P. Chen, Y. Xiao et al., “Adaptive leader-following formation control with collision avoidance for a class of second-order nonlinear multi-agent systems,” Neurocomputing, vol. 350, pp. 282–290, 2019. [Google Scholar]
39. S. Yang, W. Bai, T. Li, Q. Shi, Y. Yang et al., “Neural-network-based formation control with collision, obstacle avoidance and connectivity maintenance for a class of second-order nonlinear multi-agent systems,” Neurocomputing, vol. 439, pp. 243–255, 2021. [Google Scholar]
40. J. Wen, C. Wang and G. Xie, “Asynchronous distributed event-triggered circle formation of multi-agent systems,” Neurocomputing, vol. 295, pp. 118–126, 2018. [Google Scholar]
41. I. Sarıçiçek and Y. Akkuş, “Unmanned aerial vehicle hub-location and routing for monitoring geographic borders,” Applied Mathematical Modelling, vol. 39, no. 14, pp. 3939–3953, 2015. [Google Scholar]
42. S. Daingade, A. Sinha, A. V. Borkar and H. Arya, “A variant of cyclic pursuit for target tracking applications: Theory and implementation,” Autonomous Robots, vol. 40, no. 4, pp. 669–686, 2016. [Google Scholar]
43. C. Wang, G. Xie and M. Cao, “Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle,” Automatica, vol. 50, no. 4, pp. 1100–1108, 2014. [Google Scholar]
44. C. Godsil and G. Royle, in Algebraic Graph Theory, New York: Springer, 2001. [Google Scholar]
45. D. S. Bernstein, Matrix Mathematics: Theory, Facts, and Formulas, Princeton, NJ, USA: Princeton University Press, 2009. [Google Scholar]
46. W. Ren, R. W. Beard and E. M. Atkins, “A survey of consensus problems in multi-agent coordination,” in Proc. IEEE American Control Conf., Portland, OR, USA, pp. 1859–1864, 2005. [Google Scholar]
Appendix A
From Eq. (12), we have
Let
For a system solution for a single agent, the system will be of the form
Let
Let J be the Jordan form of the matrix associated with laplacian
such that
Remark 6. For a directed graph
Let
if
For an asymptotically stable system
Therefore, it implies that
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools