
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

An Improved Time Feedforward Connections Recurrent Neural Networks
1 School of Hydraulic & Environmental Engineering, Changsha University of Science & Technology, Changsha, 410014, China
2 School of Computer & Communication Engineering, Changsha University of Science & Technology, Changsha, 410014, China
3 AI Liberal Arts Studies, Division of Convergence, Honam University, Gwangju-si, 62399, Korea
* Corresponding Author: Se-Jung Lim. Email:
Intelligent Automation & Soft Computing 2023, 36(3), 2743-2755. https://doi.org/10.32604/iasc.2023.033869
Received 30 June 2022; Accepted 27 August 2022; Issue published 15 March 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Recurrent Neural Networks (RNNs) have been widely applied to deal with temporal problems, such as flood forecasting and financial data processing. On the one hand, traditional RNNs models amplify the gradient issue due to the strict time serial dependency, making it difficult to realize a long-term memory function. On the other hand, RNNs cells are highly complex, which will significantly increase computational complexity and cause waste of computational resources during model training. In this paper, an improved Time Feedforward Connections Recurrent Neural Networks (TFC-RNNs) model was first proposed to address the gradient issue. A parallel branch was introduced for the hidden state at time t − 2 to be directly transferred to time t without the nonlinear transformation at time t − 1. This is effective in improving the long-term dependence of RNNs. Then, a novel cell structure named Single Gate Recurrent Unit (SGRU) was presented. This cell structure can reduce the number of parameters for RNNs cell, consequently reducing the computational complexity. Next, applying SGRU to TFC-RNNs as a new TFC-SGRU model solves the above two difficulties. Finally, the performance of our proposed TFC-SGRU was verified through several experiments in terms of long-term memory and anti-interference capabilities. Experimental results demonstrated that our proposed TFC-SGRU model can capture helpful information with time step 1500 and effectively filter out the noise. The TFC-SGRU model accuracy is better than the LSTM and GRU models regarding language processing ability.Keywords
Deep neural networks (DNNs) can be applied to learn the abstracted information of complex systems by constructing a deep model. They can be widely applied to pattern recognition [1–3], machine learning [4,5], etc.
Recurrent Neural Networks (RNNs) are the common DNNs used to handle time series tasks [6]. An RNN is different from other layer structures in hierarchical networks because of its time serial dependency in the same layer. It means the state
However, training RNNs is difficult when long-term dependencies are large enough. The backpropagation chain of RNNs is longer during training than DNNs with the same number of layers, thus making it easy for vanishing and exploding gradients to arise [14]. When training RNNs, Backpropagation Through Time (BPTT) is used to update the parameters. The gradient problem encountered by RNNs results from continuous multiplication [15]. Researchers have put forward many improved models to improve these problems. The best solution is to introduce “gates” into the RNNs cell, such as Long Short-Term Memory (LSTM) [16,17] and Gate Recurrent Unit (GRU) [18].
The gates of LSTM and GRU alleviate the gradient vanishing and exploding with the cost of being time-consuming and having high computational complexity. In recent years, ResNet [19] and Highway Network [20] have been accepted to improve gradient problems in intense networks. These methods assume separate Feedforward Connections (FC) between different layers. Therefore, when gradient backpropagation is performed during training, it can be transferred to the previous network layer without nonlinear conversion. Recurrent Highway Network (RHN) reduces the cost of RNNs by feedforward connections between recurrent layers by introducing Highway Network [21]. But RHN cannot solve the gradient issues in the process of horizontal propagation in training. The residual recurrent networks (Res-RNN) use residual learning to improve the gradient problems [22]. Compared with Highway Network, ResNet cannot freely control the residual channels by learning gains. However, learning to open the information flow intelligently for a temporal network is helpful for long-term dependence.
Therefore, inspired by Highway Network, we proposed Time Feedforward Connections Recurrent Neural Networks (TFC-RNNs). TFC-RNNs improve RNNs by feedforward connections between the horizontal time steps, which allows the gradient at t − 1 to be transferred to t + 1 without the nonlinear transformation at time t. Meanwhile, to solve the overly complex problem of “gates” RNNs cell, a simplified RNNs cell model was proposed, that is, Simple Gate Unit (SGRU). Experimental results show that our TFC-SGRU model is superior to LSTM and GRU models in capturing long-term dependence.
The main contributions of this paper are summarized as follows. First, this paper introduced a novel recurrent unit with TFC-RNNs to solve the gradient issues. Then, to solve the overly complex problem of “gates” RNNs cell, a simplified RNNs cell model was proposed: SGRU. Finally, we have a combined model, TFC-SGRU, which improves gradient problems and reduces computational complexity.
The rest of this paper is organized as follows. Section 2 describes the relevant works. Section 3 presents the relevant TFC-RNNs and SGRU models. Section 4 provides extensive experimental results regarding Memory Copying Tasks, Denoise Tasks, and model accuracy of language processing ability based on bAbI Question Answering. Section 5 concludes this paper.
The classical RNNs model is
where
Despite the excellent performance of classical RNNs in processing time series data, there remain some problems: gradient issues and high computational complexity [23]. For DNN, there are many ways to improve the performance, such as transfer learning mentioned [24] and Faster R-CNN [25]. Some improved versions of RNNs have been proposed. Currently, LSTM and GRU are the best-performing RNNs of the improved structure. The expression of GRU is shown as follows.
where
There are also many ways to handle temporal data, such as RNNs and federated learning [26]. RNNs remain irreplaceable in terms of temporal data, more and more widely used, such as weather forecasting [27–29], water conservancy prediction [30–32], etc. Therefore, the improved research on RNNs still plays a significant role. Besides, the new RNNs models are constantly emerging. Clockwork RNN (CW-RNN) is put forward to optimize long-term dependence ability in [33]. Through the design of a manner hiding memory matrix and a clock-like frequency mask, the RNN memory is divided into several parts to enhance the memory effects. Although such a method performs well in the regression model, it still has shortcomings in other data. In [34], Tree Memory Network (TMN) was proposed to achieve modular improvement for RNNs, with three modules defined: input module, controller, and memory module. Such a structure can capture the short-term and long-term dependence more efficiently. However, the input of prior knowledge is required, and the model performance is constrained. Despite the excellent performance of these improved models in specific fields, they can still not significantly improve the time serial dependency of RNNs, which denies the improvement outcome.
An Independently Recurrent Neural Network (IndRNN) [35] is proposed to optimize the computing complexity [35]. The cell of IndRNN in each layer is independent of each other, and the neuron in the next layer relates to all cells of the upper layer (the output of the upper layer is adopted as the input of a neuron in this layer). Breaking the series relationship of RNNs in the time dimension reduces the level of its complexity, but the long-term dependence ability of the model is reduced. The adder works similarly to RNNs [36]. Combined with the features of the adder, Carry-lookahead (CL-RNNs) is proposed in [37], which alleviates the problems in time series for parallel computing, thus mitigating the effects of the training complexity. However, the performance of CL-RNN in time series tasks is inferior to LSTM and GRU.
Further, many researchers tried introducing residual learning into RNNs with residual connections proved effective for deep networks. RHN and Residual Recurrent Highway Network ((R2HN) [38] improve multi-layers RNNs by introducing Highway Network. However, there cannot improve the time serial dependency of RNNs.
Most RNNs are improved in certain aspects, so their overall performance remains inferior to LSTM and GRU. On the one hand, the TFC-SGRU model proposed in this paper enhances the time series by introducing the time feedforward. On the other hand, it improves the complexity of computing in training by reducing the cell complexity.
In general, the performance of DNNs is related to the network depth in the spatial dimension. In the case of sufficient training data, the higher the depth, the greater the number of network layers, and the better the performance. Deep network training refers to the chain rules’ reverse gradient update.
When there are N layers in one DNN and one neuron in each layer, it can be expressed as follows.
where
where
According to Eq. (9), the gradient transfer can be carried out through successive multiplication. At
For RNNs, the gradient problems are manifested in the time dimension. According to Eq. (1), its gradient update can be inferred.
where T represents the time step of RNNs’ input matrix.
According to the BPTT, the gradient flows across all the time steps. Therefore, in Eq. (10),
Like Eq. (9), the gradient update of RNNs remains dependent on continuous multiplication. Therefore, the gradient updating in the time dimension for RNN is the same as that of general deep networks in the spatial dimension. The greater the time depth, the more likely it is for gradient explosion and gradient disappearance to occur.
DNNs could be expressed as follows.
where
where
The structure of the Highway Network is shown in Fig. 1a. The green circles represent the FC. When the depth of the network is sufficient, the gradient will transfer the i + 1 layer to the i − 1 layer. As a result, the effective gradient will be transmitted further.
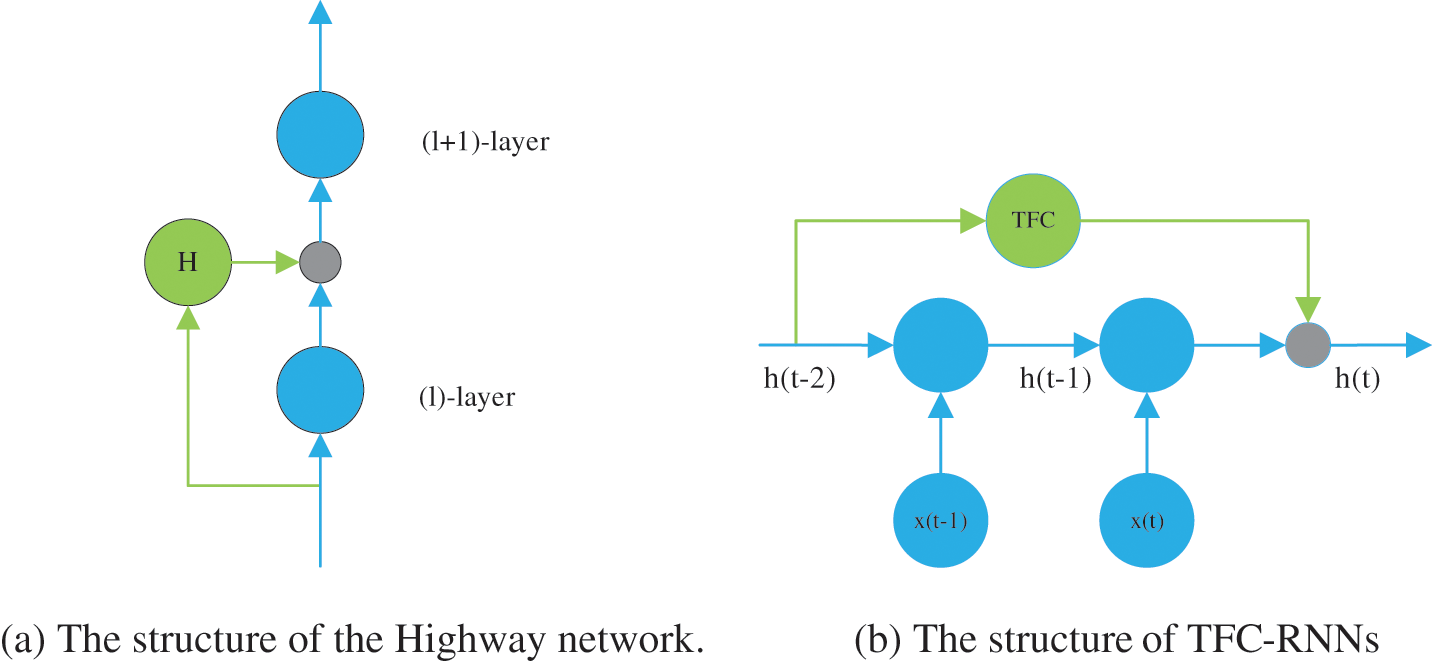
Figure 1: Comparison of the structure of highway network and RNNs
Concurrent with Highway Network, ResNets present residual connections with FC. Both are to learn high accuracy gains with enormously increased depth. Highway Network has parameters, and ResNets are parameter-free. Thus, Highway Network gates can freely control the channels by learning gains. Therefore, we use FC to solve the gradient issues in the process of horizontal propagation. However, RNNs need to control the flow of historical information intelligently, and we introduce Highway Network to improve RNNs. The structure of TFC-RNNs is shown in Fig. 1b.
We present and explain the design of TFC-RNNs in this section. The RNNs input data typically consists of T time steps where the
where
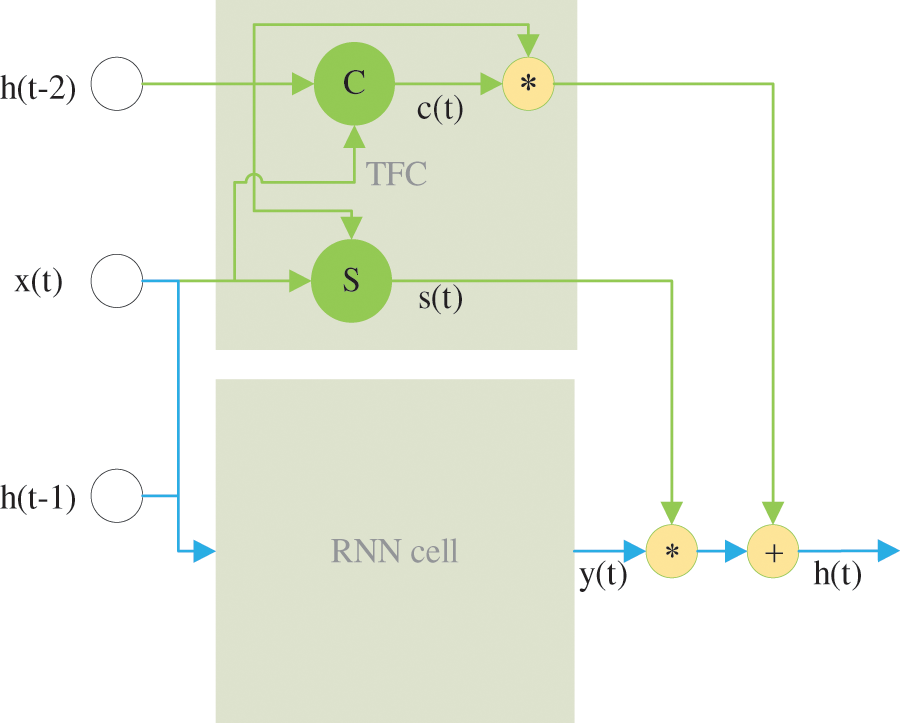
Figure 2: The TFC-RNNs cell
We define two transforms, “carry gate” and “transform gate”, such that
where
where H is usually an affine transform followed by a nonlinear activation function.
If
3.2 Analysis of TFC-RNNs Gradient
The gradient transmission of TFC-RNNs is analyzed to demonstrate the benefits of TFC to RNNs from a theoretical perspective. TFC-RNNs could be expressed as:
where
According to the chain rules,
where
The TFC module transforms the gradient into a sum expression instead of continuous multiplication, which avoids gradient issues. Besides, the TFC is trained and activated. The activation function can regularize the result in a perfect range.
3.3 Single Gate Recurrent Unit
LSTM and GRU perform better in the time series data with increasing the number of parameters of RNNs cell. Miscellaneous leads to a significant increase in the number of training parameters, thus increasing the difficulty of training considerably. For DNN, there are many ways to reduce the computation, such as transfer learning mentioned in [24]. This suggests a simple RNNs cell that reduces the training parameters. This paper simplified the GRU cell to propose the more superficial RNNs cell, Single Gate Recurrent Unit (SGRU). SGRU can be expressed as follows.
where
GRU relies on a “reset gate” to filter the noise in the history, and an “update gate” is applied to retain useful historical information, thus achieving long-term memory [39]. Compared with the GRU Eqs. (2)–(5), SGRU integrates the “update gate” and “reset gate” to “ reset gate” to reduce the number of its training parameters.
For training a network, we show the parameter for each part of TFC-RNNs. The “carry gate” can define as
where
We found that a simple RNNs cell is sufficient for learning in long-time dependencies networks for different activation functions. This is a significant property since it may not be possible to reduce the number of training parameters. RNN cell block can be set to our proposed SGRU model. Finally, we have a combined model, namely the TFC-SGRU model.
4 Experimental Results and Analysis
We compare TFC-SGRU with the well-known RNNs (LSTMs and GRUs). Our code can be downloaded from https://gitee.com/homesong/tfcrnn.
Memory copying tasks are the benchmark to verify a model’s performance in capturing long-term dependencies, which follows a similar configuration. A data table consists of 10 categories:
This task is used to train the network to remember the ten categories and the order of characters for the T time step. A simple baseline is established to output 10 + T blanks followed by ten random symbols, and a cross-entropy is produced as follows.
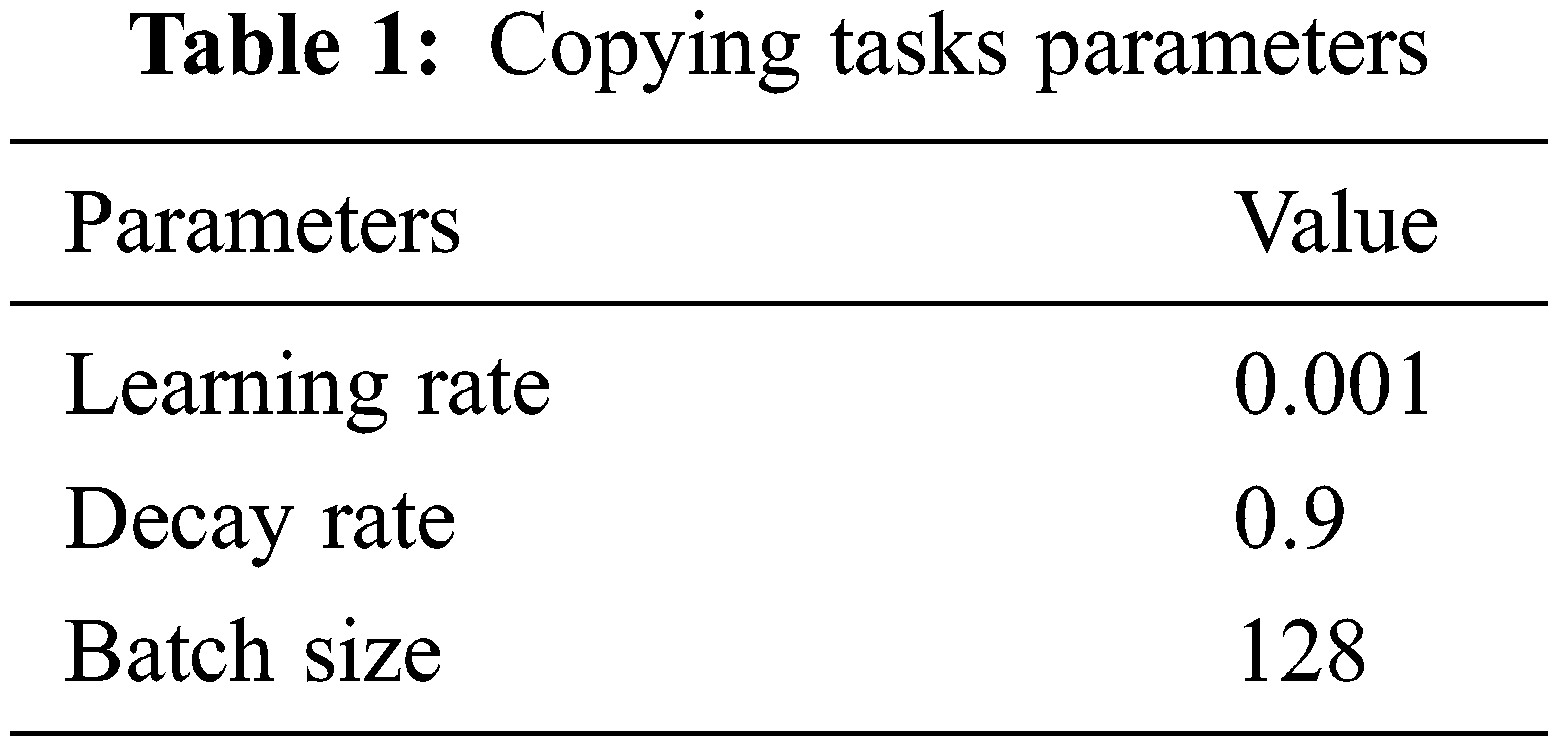
This experiment is aimed mainly to verify the performance of TFC-SGRU in long-term dependence. The performance was tested at time step t = 500 and 1000, respectively. Allowing for the activation function of the hidden output, tanh was adopted. And the optimizer is set to RMSProp. The control model includes the widely recognized LSTM and GRU models. Other model hyperparameters were set according to Table 1.
The cross-entropy loss gets stuck, indicating that the gradient disappears and that the model’s parameter cannot be updated. According to Eq. (11), the more significant time step T increases, the easier it is for the gradient to disappear and the more difficult it is to capture long-term dependence. Fig. 3a shows the result of the copying task for T = 500. The baseline is 0.04. TFC-SGU is the only structure to break down the baseline successfully, while GRU and LSTM get stuck. The TFC-SGU outperforms the LSTM and GRU in terms of learnability. It indicates that it is easy for TFC-SGU to learn the knowledge before time step 500. To further increase the sequence length, T is set to 1000. The baseline is 0.0204. Fig. 3b shows the result of the copying task. LSTM and GRU fall outside the baseline, while TFC-SGRU could break the baseline easily. Therefore, the capacity of TFC-SGRU to capture the long-term dependence is much higher than LSTM and GRU.
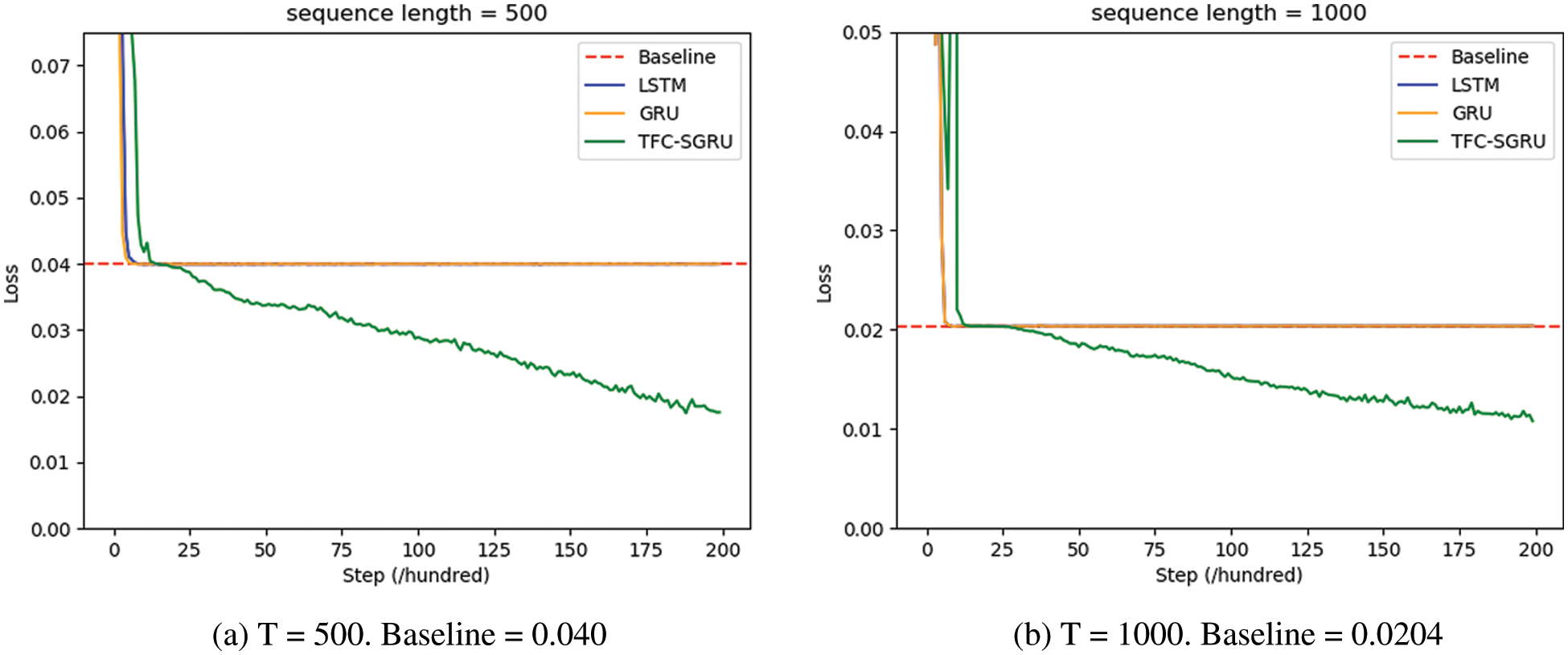
Figure 3: Result of copying tasks. These show the cross-entropy loss of training
Denoise tasks are used to evaluate the capability of RNN architecture to remove noise (forgetting ability). The random noise is added into sequential labels, while RNN locates the noise and outputs the sequential labels. The composition of the denoise tasks data is similar to that of copying tasks. An alphabet consists of i categories
The experiment was performed to verify the capacity of TFC-SGRU to remove the historical noise. The performance was tested at time step t = 500 and 1000, respectively. The other parameters were set in the same way as in Table 1. The optimizer is also set to RMSProp. The control model remains LSTM and GRU. Fig. 4a shows the experimental results obtained when the time step is T = 500. LSTM can break the baseline of 0.04. Although TFC-SGRU and GRU could break the baseline effectively, the speed of TFC-SGRU is significantly faster than GRU. TFC-SGRU and GRU effectively remove long-term noise beyond the time step T = 500. By contrast, LSTM is ineffective. Figs. 4b and 4c show the experimental results at time steps T = 1000 and T = 1500. In two experimental results, only TFC-SGRU effectively broke the baseline, indicating that the model remembers the helpful information before the time steps 1500 and filters the long-term noise.
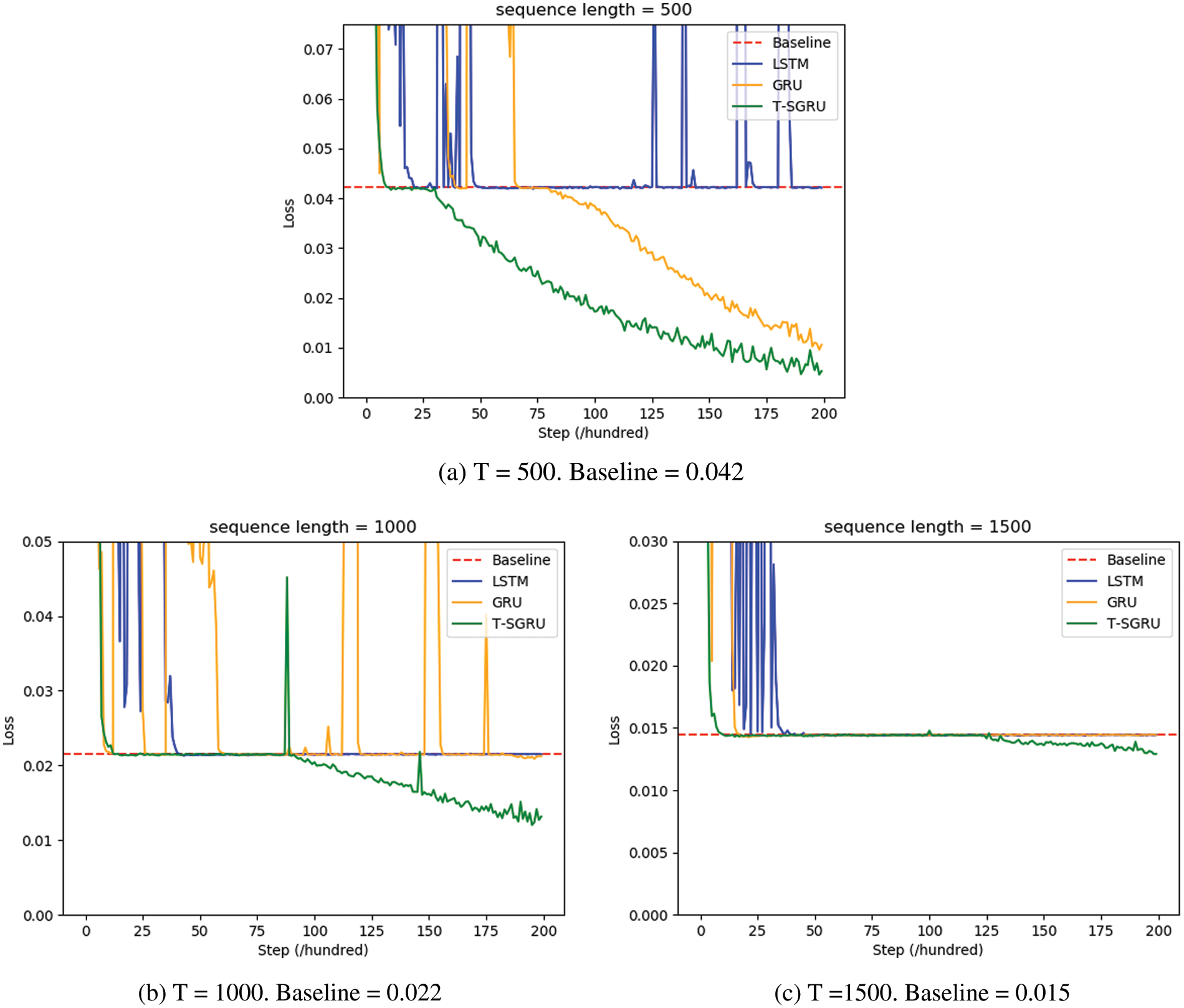
Figure 4: Results of the denoise tasks. These show the cross-entropy loss of training
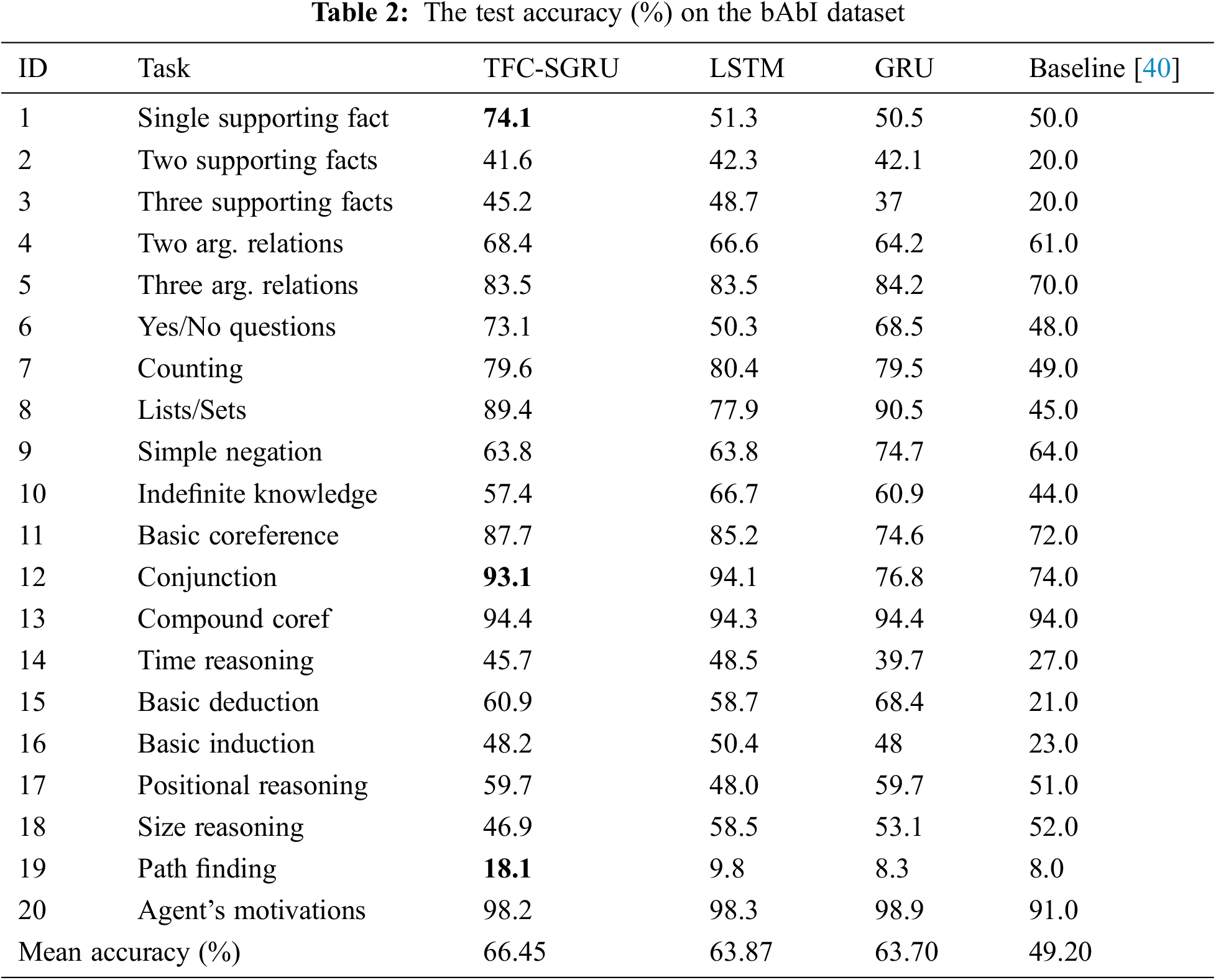
We use the bAbI Question Answering datasets [40] to examine RNN’s ability to understand language. bAbI datasets include 20 different subtasks. These tasks are to find the answer to the question according to the story. A story consists of several sentences. The answers are a word or several words. Every different task includes 1k/1k/9k examples for test/dev/train. Each subtask is trained separately. The input data is (
This experiment tests the GRU, LSTM, and TFC-SGU on sentence-level bAbI datasets. We use Adam optimizer to train the model with a batch size of 128, a hidden state size of 40, layers of 2, and embeddings of 128. The learning rate can be set to 0.001. The characteristics of each subtask are different, so RNNS accuracy is different on 20 subtasks. Table 2 shows the accuracy result on TFC-SGRU, LSTM, and GRU. Given the same parameters, in most subtasks, the accuracy of TFC-SGRU is better than that of LSTM/GRU. TFC-SGRU achieves the highest average accuracy of 20 subtasks.
In this paper, we firstly proposed TFC-RNN by introducing the Time Feedforward Connections. The TFC-RNNs model can transmit the gradient from time t − 2 to t without t − 1 nonlinear transformation, improving the long-term dependencies and the gradient problem. Then, we proposed SGU by removing the update gate of GRU. TFC-RNNs and SGRU were combined as a new TFC-SGRU model to reduce computational complexity. Finally, our experimental results show that optimization of TFC-SGRU is not hampered even as time-depth increases to 1500-time steps. However, TFC-SGRU still has limitations in parallel computing. Next, we will explore efficient RNNs sequence models.
Funding Statement: This work was funded by the National Science Foundation of Hunan Province (2020JJ2029). This work was also supported by a research fund from Honam University, 2022.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. J. Schmidhuber, “Deep learning in neural networks: An overview,” Neural Networks, vol. 61, pp. 85–117, 2015. [Google Scholar] [PubMed]
2. Y. LeCun, Y. Bengio and G. Hinton, “Deep learning,” Nature, vol. 521, no. 7553, pp. 436–444, 2015. [Google Scholar] [PubMed]
3. K. Guo, C. Shen, B. Hu, M. Hu and X. Kui, “RSNet: Relation separation network for few-shot fimilar class recognition,” IEEE Transactions on Multimedia, pp. 1–12, 2022. [Google Scholar]
4. K. Shuang, Y. Tan, Z. Cai and Y. Sun, “Natural language modeling with syntactic structure dependency,” Information Sciences, vol. 523, pp. 220–233, 2020. [Google Scholar]
5. J. Wang, Y. Gao, K. Wang, A. K. Sangaiah and S. Lim, “An affinity propagation-based self-adaptive clustering method for wireless sensor networks,” Sensors (Basel), vol. 19, no. 11, pp. 1–15, 2019. [Google Scholar]
6. J. Chung, C. Gulcehre, K. Cho and Y. Bengio, “Empirical evaluation of gated recurrent neural networks on sequence modeling,” arXiv:1412.3555, 2014. [Google Scholar]
7. K. Greff, R. K. Srivastava, J. Koutnik, B. R. Steunebrink and J. Schmidhuber, “LSTM: A search space odyssey,” IEEE Transactions on Neural Networks, vol. 28, no. 10, pp. 2222–2232, 2017. [Google Scholar]
8. S. P. Singh, A. Kumar, H. Darbari, L. Singh, A. Rastogi et al., “Machine translation using deep learning: An overview,” in Proc. Comptelix, Beijing, China, pp. 162–167, 2017. [Google Scholar]
9. T. Mikolov, M. Karafiát, L. Burget, J. Černocký and S. Khudanpur, “Recurrent neural network based language model,” in Proc. Interspeech, Makuhari, Chiba, Japan, pp. 1045–1048, 2010. [Google Scholar]
10. M. B. Kamal, A. A. Khan, F. A. Khan, M. M. A. Shahid, C. Wechtaisong et al., “An innovative approach utilizing binary-view transformer for speech recognition task,” Computers, Materials and Continua, vol. 72, no. 3, pp. 5547–5562, 2022. [Google Scholar]
11. M. Jung, H. Lee and J. Tani, “Adaptive detrending to accelerate convolutional gated recurrent unit training for contextual video recognition,” Neural Networks, vol. 105, pp. 356–370, 2018. [Google Scholar] [PubMed]
12. J. Donahue, L. Anne Hendricks, S. Guadarrama, M. Rohrbach, S. Venugopalan et al., “Long-term recurrent convolutional networks for visual recognition and description,” in Proc. CVPR, Boston, MA, USA, pp. 2625–2634, 2015. [Google Scholar]
13. L. Gao, H. Li, Z. Liu, Z. Liu, L. Wan et al., “RNN-transducer based Chinese sign language recognition,” Neurocomputing, vol. 434, pp. 45–54, 2021. [Google Scholar]
14. R. Pascanu, T. Mikolov and Y. Bengio, “On the difficulty of training recurrent neural networks,” in Proc. ICML, Atlanta, GA, USA, pp. 1310–1318, 2013. [Google Scholar]
15. X. Glorot and Y. Bengio, “Understanding the difficulty of training deep feedforward neural networks,” in Proc. AISTATS, Sardinia, Italy, pp. 249–256, 2010. [Google Scholar]
16. S. Hochreiter and J. Schmidhuber, “Long short-term memory,” Neural Computation, vol. 9, no. 8, pp. 1735–1780, 1997. [Google Scholar] [PubMed]
17. F. A. Gers, J. Schmidhuber and F. Cummins, “Learning to forget: Continual prediction with LSTM,” Neural Computation, vol. 12, no. 10, pp. 2451–2471, 2000. [Google Scholar] [PubMed]
18. K. Cho, B. Van Merriënboer, C. Gulcehre, D. Bahdanau, F. Bougares et al., “Learning phrase representations using RNN encoder-decoder for statistical machine translation,” in Proc. EMNLP, Doha, Qatar, pp. 1724–1734, 2014. [Google Scholar]
19. K. He, X. Zhang, S. Ren and J. Sun, “Deep residual learning for image recognition,” in Proc. CVPR, Las Vegas, NV, USA, pp. 770–778, 2016. [Google Scholar]
20. R. K. Srivastava, K. Greff and J. Schmidhuber, “Highway networks,” arXiv:1505.00387, 2015. [Google Scholar]
21. J. G. Zilly, R. K. Srivastava, J. Koutnık and J. Schmidhuber, “Recurrent highway networks,” in Proc. ICML, Sydney, Australia, pp. 4189–4198, 2017. [Google Scholar]
22. B. Yue, J. Fu and J. Liang, “Residual recurrent neural networks for learning sequential representations,” Information, vol. 9, no. 3, pp. 56, 2018. [Google Scholar]
23. Y. Bengio, P. Y. Simard and P. Frasconi, “Learning long-term dependencies with gradient descent is difficult,” IEEE Transactions on Neural Networks, vol. 5, no. 2, pp. 157–166, 1994. [Google Scholar] [PubMed]
24. H. Guo, X. Zhuang, P. Chen, N. Alajlan and T. Rabczuk, “Stochastic deep collocation method based on neural architecture search and transfer learning for heterogeneous porous media,” Engineering with Computers, pp. 1–26, 2022. [Google Scholar]
25. R. Meng, S. G. Rice, J. Wang and X. Sun, “A fusion steganographic algorithm based on faster R-CNN,” Computers, Materials & Continua, vol. 55, no. 1, pp. 1–16, 2018. [Google Scholar]
26. K. Guo, T. Chen, S. Ren, N. Li, M. Hu et al., “Federated learning empowered real-time medical data processing method for smart healthcare,” IEEE/ACM Transactions on Computational Biology and Bioinformatics, pp. 1–12, 2022. [Google Scholar]
27. Z. Karevan and J. A. Suykens, “Transductive LSTM for time-series prediction: An application to weather forecasting,” Neural Networks, vol. 125, pp. 1–9, 2020. [Google Scholar] [PubMed]
28. X. Qing and Y. Niu, “Hourly day-ahead solar irradiance prediction using weather forecasts by LSTM,” Energy, vol. 148, pp. 461–468, 2018. [Google Scholar]
29. S. Manikandan and B. Nagaraj, “Hyperparameter tuned bidirectional gated recurrent neural network for weather forecasting,” Intelligent Automation & Soft Computing, vol. 33, no. 2, pp. 761–775, 2022. [Google Scholar]
30. N. I. Ulloa, S. H. Yun, S. H. Chiang and R. Furuta, “Sentinel-1 spatiotemporal simulation using convolutional LSTM for flood mapping,” Remote Sensing, vol. 14, no. 2, pp. 246–260, 2022. [Google Scholar]
31. Y. Xu, C. Hu, Q. Wu, S. Jian, Z. Li et al., “Research on particle swarm optimization in LSTM neural networks for rainfall-runoff simulation,” Journal of Hydrology, vol. 608, pp. 1–11, 2022. [Google Scholar]
32. J. Wang, Y. Zou, P. Lei, R. S. Sherratt and L. Wang, “Research on crack opening prediction of concrete dam based on recurrent neural network,” Journal of Internet Technology, vol. 21, pp. 1161–1169, 2020. [Google Scholar]
33. J. Koutník, K. Greff, F. Gomez and J. Schmidhuber, “A clockwork RNN,” in Proc. ICML, Beijing, China, pp. 3881–3889, 2014. [Google Scholar]
34. T. Fernando, S. Denman, A. McFadyen, S. Sridharan and C. Fookes, “Tree memory networks for modelling long-term temporal dependencies,” Neurocomputing, vol. 304, pp. 64–81, 2018. [Google Scholar]
35. S. Li, W. Li, C. Cook, C. Zhu and Y. Gao, “Independently recurrent neural network (IndRNNBuilding a longer and deeper RNN,” in Proc. CVPR, Salt Lake City, UT, USA, pp. 5457–5466, 2018. [Google Scholar]
36. J. Wang, W. Chen, L. Wang, Y. Ren and R. S. Sherratt, “Blockchain-based data storage mechanism for industrial internet of things,” Intelligent Automation & Soft Computing, vol. 26, no. 5, pp. 1157–1172, 2020. [Google Scholar]
37. H. Jiang, F. Qin, J. Cao, Y. Peng and Y. Shao, “Recurrent neural network from adder’s perspective: Carry-lookahead RNN,” Neural Networks, vol. 144, pp. 297–306, 2021. [Google Scholar] [PubMed]
38. T. Zia and S. Razzaq, “Residual recurrent highway networks for learning deep sequence prediction models,” Journal of Grid Computing, vol. 18, no. 1, pp. 169–176, 2020. [Google Scholar]
39. R. Dey and F. M. Salemt, “Gate-variants of Gated Recurrent Unit (GRU) neural networks,” in Proc. MWSCAS, Boston, MA, USA, pp. 1597–1600, 2017. [Google Scholar]
40. J. Weston, A. Bordes, S. Chopra, A. M. Rush, B. Van Merriënboer et al., “Towards AI-complete question answering: A set of prerequisite toy tasks,” arXiv: 1502.05698, 2015. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools