
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Mobility Aware Zone-Based Routing in Vehicle Ad hoc Networks Using Hybrid Metaheuristic Algorithm
1 M. Kumarasamy College of Engineering, Karur, Tamilnadu, India
2 Kalasalingam Academy of Research and Education, Krishnankoil, Tamilnadu, India
3 Ramco Institute of Technology, Rajapalayam, Tamilnadu, India
4 Kongu Engineering College, Erode, Tamilnadu, India
* Corresponding Author: C. Nandagopal. Email:
Intelligent Automation & Soft Computing 2023, 36(1), 113-126. https://doi.org/10.32604/iasc.2023.031103
Received 10 April 2022; Accepted 10 June 2022; Issue published 29 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Vehicle Ad hoc Networks (VANETs) have high mobility and a randomized connection structure, resulting in extremely dynamic behavior. Several challenges, such as frequent connection failures, sustainability, multi-hop data transfer, and data loss, affect the effectiveness of Transmission Control Protocols (TCP) on such wireless ad hoc networks. To avoid the problem, in this paper, mobility-aware zone-based routing in VANET is proposed. To achieve this concept, in this paper hybrid optimization algorithm is presented. The hybrid algorithm is a combination of Ant colony optimization (ACO) and artificial bee colony optimization (ABC). The proposed hybrid algorithm is designed for the routing process which is transmitting the information from one place to another. The optimal routing process is used to avoid traffic and link failure. The fitness function is designed based on Link stability and Residual energy. The validation of the proposed algorithm takes solution encoding, fitness calculation, and updating functions. To perform simulation experiments, NS2 simulator software is used. The performance of the proposed approach is analyzed based on different metrics namely, delivery ratio, delay time, throughput, and overhead. The effectiveness of the proposed method compared with different algorithms. Compared to other existing VANET algorithms, the hybrid algorithm has proven to be very efficient in terms of packet delivery ratio and delay.Keywords
VANET is a kind of wireless networking innovation, made by building up a network of vehicles with roadside units, utilized for communication reasons on roadways or in urban conditions to expand security and comfort for vehicles [1]. VANETs act as an important part of Intelligent Transportation Systems (ITS) and VANETs are an up-and-coming innovative innovation, a blend of Ad-Hoc network, wireless local area network, and cell innovation to achieve a shrewd vehicle Communication framework. VANETs are indistinguishable from Mobile Ad-Hoc Networks (MANETs) [2]. VANETS can be recognized from MANETs by their hybrid architecture. In basic words, VANET is communication between vehicles. Ad hoc network is depicted as networks that don’t rely upon any of the previous structure like routers in association situated network and access points in transmission networks. The basic structure of VANET consists mainly of vehicles equipped with onboard units [OBU], centralized stations and vehicles called roadside units [RSU], and base station units [BSU] at roadside intersections. Then the vehicles on the network communicate with each other via OBU via Messages. Similarly, the OBU can communicate directly with the RSU and the BSU [3,4].
During the previous several years, a lot of investigation has been done on VANETs in terms of routing strategies and information distribution. Target tracking, which makes use of onboard car sensors, is a popular way to keep passengers entertained [5]. In an extremely dynamic situation such as the VANET, it’s challenging to determine proper requirements for cluster head election as well as cluster participation since vehicles frequently enter or leave the cluster. Vehicle clustering can be done in two ways in the VANET: static clustering primarily utilizes RSUs as static clusters-head as well as is predicated on Vehicle-to-Infrastructure (V2I) transmission [6,7]. In addition, to achieve authentic interaction and Internet access, the vehicles are fundamentally linked through RSUs. The trucks with high mobility are not usually coupled to the RSUs owing to the extensive distance between them. Cluster heads are determined among cluster members in dynamic clustering, which is dependent on Vehicle-to-Vehicle (V2V) transmission. The definition of static cluster heads is altered by this approach [8,9]. As the dynamic clusters move down the road, the cars either enter or exit the clusters based on their velocity to recognize cluster heads. In this situation, V2V transmissions are better adaptable and independent of roadside situations [10]. Despite their cluster stability and overhead optimization, these algorithms have a low quality of service.
The main objective proposed approach is mobility-aware zone-based routing on VANETs. To achieve this objective, the hybridization of ACO and ABC is presented. A multi-objective component is constructed for the routing process. The multi-objective function is a combination of link stability and residual energy. Below is a summary of the paper’s major contributions;
• We design a multi-objective function based on Link Stability and Residual Energy for selecting an optimal path for routing.
• The paper proposes an ACO-ABC algorithm by integrating ACO with ABC for selecting the routing path. The algorithm can effectively identify the path.
• The developed approach’s efficiency is evaluated using various parameters, and the feasibility of the suggested technique’s performance is compared to that of other algorithms.
The organization of the manuscript is listed below; the literature survey of the proposed methodology is explained in Section 2 and the structure of VANET is given in Section 3. The proposed methodology is given in Section 4 and the experimental results are analyzed in Section 5. The conclusion part is presented in Section 6.
A lot of researchers had developed Mobility aware zone-based Routing in VANETs were analyzed here; Kumar et al. [11] had developed an energy-efficient data transmission in VANETs using optimal routing In this paper, the AODV protocol was used for the routing process. A genetic algorithm was used for enhancing the routing performance.
Meidong et al. [12] presented a three-step optimal routing path algorithm. Jammers were used in this study to disrupt transmission among wireless nodes, resulting in poor service quality (QoS) in transmissions. In addition, each battery-powered node’s transmission power was regulated to save energy. Ankit et al. [13] had explained an energy-efficient routing in VANETs using a genetic algorithm. Here, the modified Ad-Hoc On-Demand Distance Vector (AODV) is used for routing. The AODV was enhanced by using a genetic algorithm. The variables for routing include traffic rate of transmission, disruption, packet failure, duration, and network stability. The optimal path selection process is used for increases the overall lifetime of transmission.
Jamal et al. [14] had presented a fast energy-aware Optimized Link State Routing (OLSR) routing in VANETs. This algorithm has overcome the difficulties present in ordinary OLSR-based routing. The effectiveness of the methodology is analyzed in terms of power consumption. Walhekar et al. [15] had explained energy and time-efficient routing protocols for high throughout VANET. In this paper, they developed two protocols namely, the CBLTR protocol and Intersection Dynamic VANET Routing (IDVR) protocol. The CBLTR protocol, which was recently established, was employed to improve route consistency as well as median throughput.
Baker et al. [16] had developed an energy-efficient routing in VANETs. Here, for routing GreeDi was introduced. In VANETs, a GreeDi-based dynamic routing protocol is utilized to find the best energy-efficient path connecting two nodes. The described approach was tested in VANET applications depending on city maps. The introduced method outperformed the original AODV in terms of power consumption. Moreover, Shafi et al. [17] presented a routing in VANETs. To achieve this concept, cross-layer cluster-based routing (CCBR) protocol was designed. The main goal is to create stable groups to increase the routing method lifespan by reducing link breakage, resulting in improved multimedia data communication. This is accomplished by inserting a clustering notion into the previous cross-layer autonomous route recovery (CLARR) utilizing a mobility measurement, while then evaluating relative velocities between them to select dependable relaying vehicles to the objective. The effectiveness of the suggested technique is evaluated using network simulator-2.34 simulation experiments for different vehicle speeds as well as compared to the conventional cross-layer demand routing protocol, CLARR. Oche et al. [18] had developed a comprehensive survey of QoS-aware routing algorithms. They looked over the protocols to see whether they could enable the multimedia functions if they had a multi-constraint path problem (MCP) if they were operational and if they had any flaws, aims, or design problems. Sun et al. [19] had developed UAV based traffic monitoring system. For experimental analysis, they used YOLOv3 dataset. They extract the local and global features. The features are fused by using Feature Pyramid Network (FPN). Finally, they applied the attention mechanism to enhance the output. Moreover, Mao et al. [20] had developed WSN positioning technology depending on GPS. They discuss the positioning technique in particular as well as show how it may be used in manufacturing by using coal mine positioning as an illustration.
3 Structure of Vehicular ADHOC Network (VANET)
VANETs are a sort of MANETs made up of vehicles interacting with each other, as well as vehicles connecting with equipment on the edges of roads and highways. OBUs are deployed in vehicles, and RSUs are installed on roadways. Fig. 1 illustrates the communication process of VANETs.
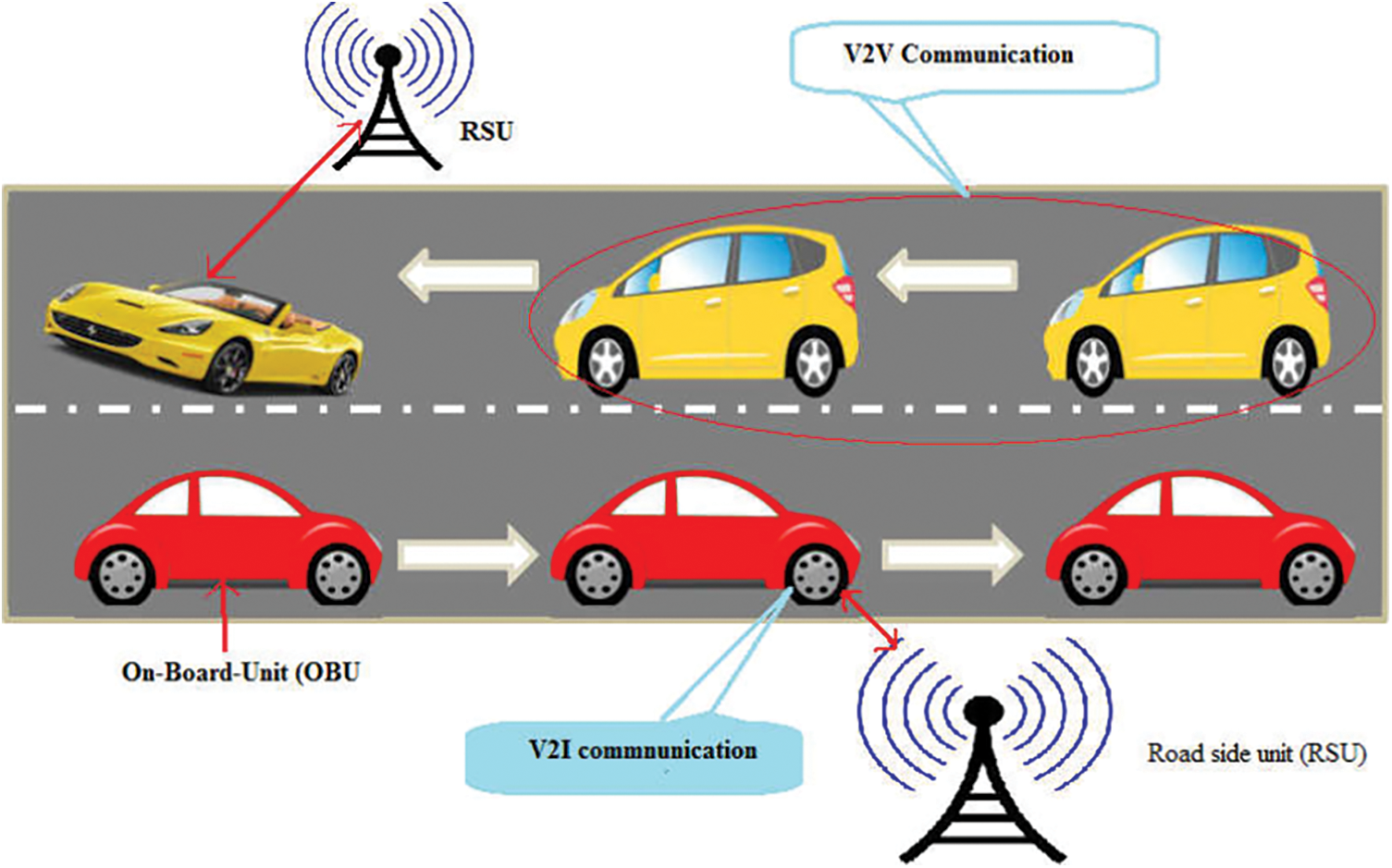
Figure 1: Communication process of VANET
Every OBU in a V2V system operates in ad hoc mode, allowing it to forward information across several hops, however, system availability is largely dependent on the vehicle intensity and mobility pattern in this mode. In a sentence, the essential features of a VANET are the extremely fast system nodes and their generally anticipated mobility behavior, as vehicles are expected to observe transport norms, and their trajectory is expected to follow road lines.
4 Proposed Mobility Aware Zone-Based Routing in VANETs
VANETs have a high movement and a randomized system structure, resulting in extremely dynamic behavior. On certain wireless ad hoc networks, the effectiveness of TCP is hampered by several difficulties, including frequent connection failures. In this article, mobility-aware zone-based routing in VANET is offered as a solution to the problem. In this concept, the optimal routing paths are selected using the ACO-ABC algorithm. The optimal route is used to reduce communication time and energy consumption. While building routing networks, location management and connection management are critical considerations. The Global Positioning System (GPS), which specifies the velocity and direction of vehicles, is commonly used for location administration. GPS is used in this paper. The overall structure is given in Fig. 2.
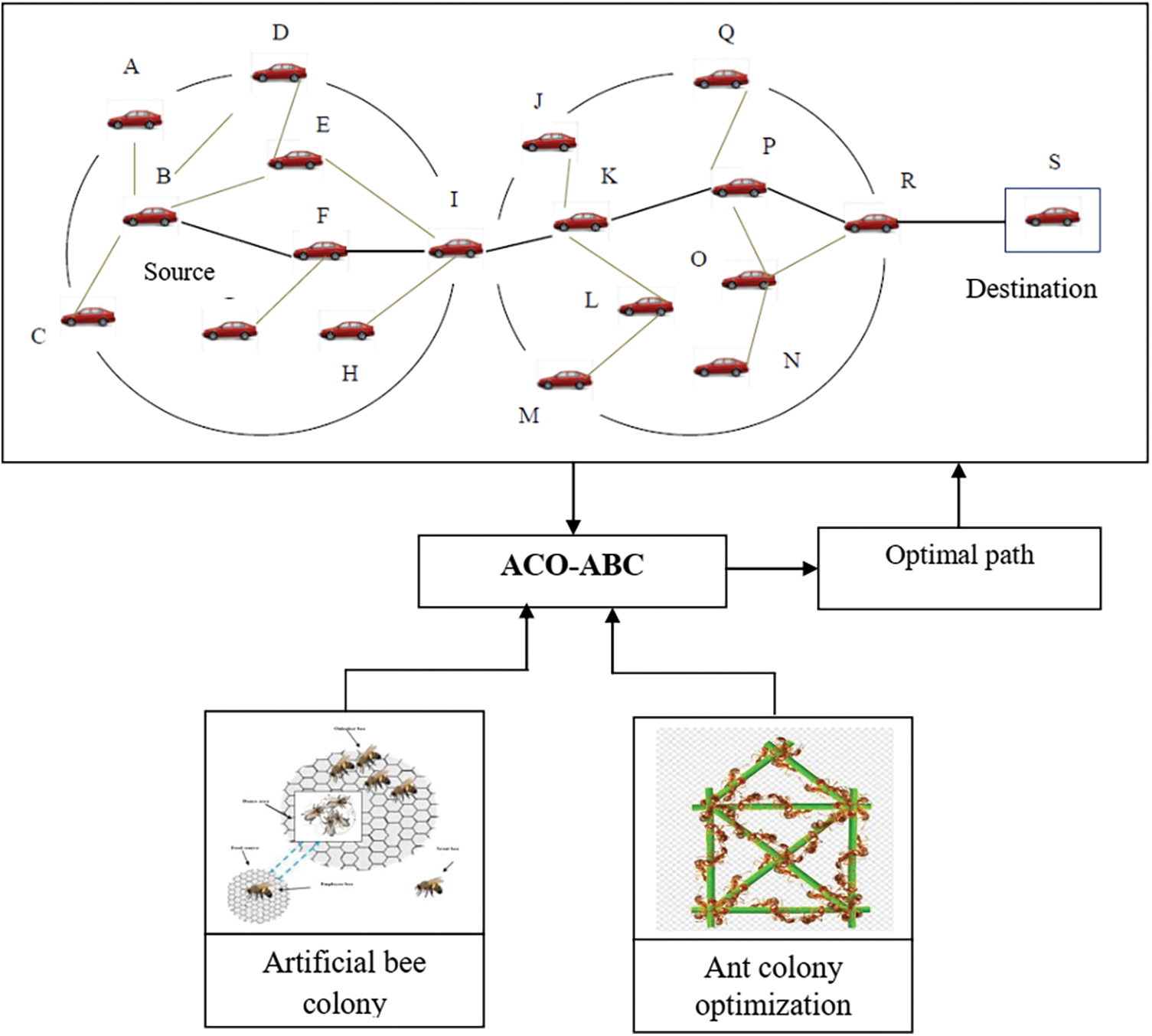
Figure 2: Overall structure of mobility aware zone-based routing
4.1 Design of Fitness Function
In this study, for routing, the multi-objective function is designed. The multi-objective function is a combination of Link stability and residual energy.
Link Stability: When building routing algorithms, location administration, and connection administration are critical considerations. The GPS, which determines vehicle direction and velocity, is frequently used for location administration. Connection administration must be established to keep the pathways connecting the vehicles constantly. This translates to assessing link stability, which is a crucial metric for making intelligent data forwarding decisions that improve overall routing performance.
Let us assume i and j are two vehicles on the road. Using GPS, the initial positions are obtained which are denoted as
The distance is calculated using the following Eq. (1).
where;
The link stability (LS)of
Here, tmax is a constant variable that represents the routing table’s duration valid duration..
Residual Energy: Energy is an important parameter for routing. A large amount of energy increases the cost. The Residual energy of each node can be measured as follows;
where,
where
where,
Fitness Calculation: The multi-objective function is utilized for the fitness function. The fitness is designed based on residual energy and link stability. The fitness can be calculated as follows;
where
4.2 Zone-Based Routing on VANET
To avoid energy consumption and time, in this paper, the network is divided into zones. Minimum distance vehicles are grouped. For packet transmission, two types of routing are used namely, the proactive approach and the reactive approach. The packets transmitted within the zone are called a proactive approach and the packets transmitted between the zone are called a reactive approach. The size of the zone is determined by the radius, which is specified in hops. A vehicle can operate in two overlapping zones, each of which is different in size. Internal vehicles, border vehicles, and outdoor vehicles are the three types of vehicles. Interior vehicles are all vehicles within such a zone having a hop length less than range. Bounding vehicles connect inside zones having a radius equal to hop durations, while external vehicles intersect within zones with hop lengths greater than the radius. Zone-based routing is given in Fig. 3. Vehicles A, D, C, and I are boundary or border vehicles in Fig. 3, while vehicles B, G, E, F, and H are interior vehicles. All additional vehicles are exterior vehicles, meaning they are not in the region.
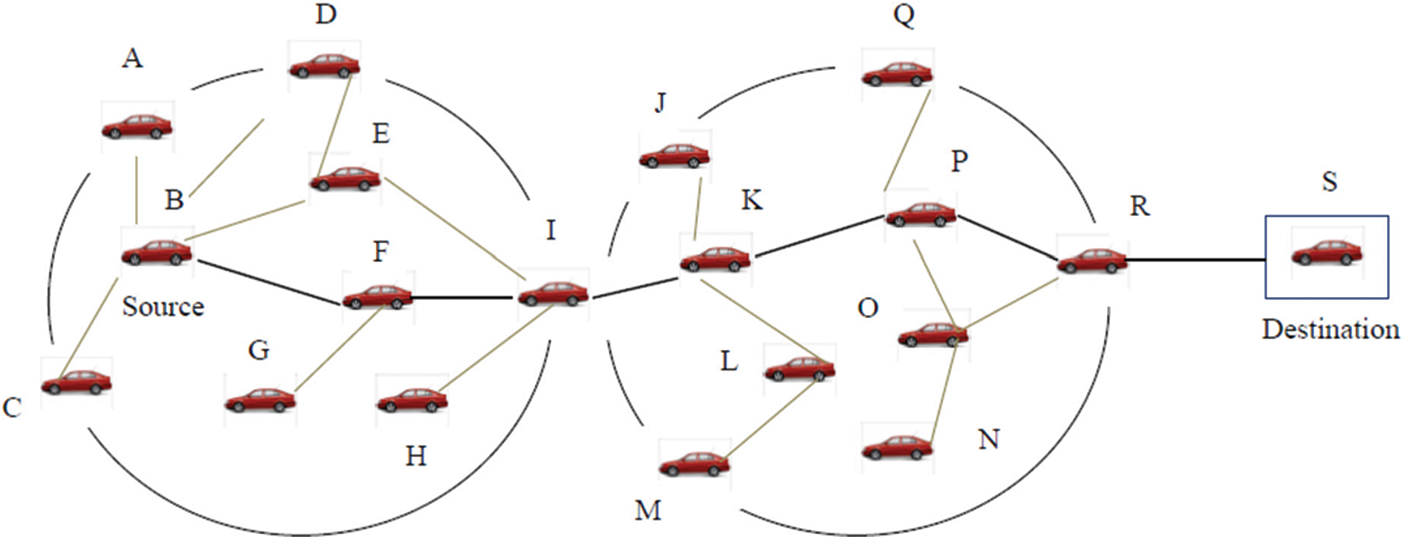
Figure 3: Zone based routing
In routing, two main phases are available namely, route discovery and route maintenance. This might occur either inside a zone or across zones. For all of this, we employed two types of routing tables: Intra zone and inter-zone routing tables. The Intra zone routing table maintains communication throughout zones on demand, while the Inter-zone routing database continuously refreshes entries within the zone. Source, destination, sequence number, type, hops, speed, position, and path are all part of the routing data architecture.
4.3 Optimal Path Selection Using ACO-ABC Algorithm
To increase the lifetime of the hub and reduce energy consumption, the optimal paths are selected in routing. For the optimal path selection process, in this paper, the ACO-ABC algorithm is utilized. The ACO-ABC is a combination of ACO and ABC. The procedure of data transmission is given below;
Step 1: Solution Encoding: Solution encoding is an important process for the optimal path selection process. Initially, the bees are initialized. The solution is considered a bee. The solution consists of the source node, destination node, sequence number, type, hops, speed, position, and path.
Source: The source node address is stored in the source field.
Destination: This field stores the destination address.
Sequence Number: Each bee is tagged with a sequence number, stored under the sequence number field.
Type: Which type of node is presented in this field.
Hops: It’s utilized to show how many bounces there are connecting a node and all the other nodes in its region. This node aids in the distinction between an exterior and an interior node.
Speed: It is stored the speed of the node.
Position: This field stored the present position of the vehicle.
Path: It stored the path between source and destination.
Step 2: Fitness Calculation: The efficiency of every resolution is determined after the solution initialization. The multi-objective function is used in this case. The fitness function is given in Eq. (10).
Step 3: Employed Bee Operations: Based on regional input (visual information), the engaged bee modifies the location (solution) in its store and checks the nectar quantity (best efficiency) of the new source (new solution). The worker bee uses the respective equation to produce prospective food positions using the previous one in memory (11).
where,
where, SN is the number of food sources equal to the number of employed bees, and
Step 4: Onlooker Bee Phase: The quantity of spectator bees is approximated following estimating the probability of the given variable. Then, depending on the possible value, develop new solutions (
Step 5: Scout Bee Phase: Calculate the scout bees’ discarded boundaries. If a variable has been discarded, substitute it using a new dynamically generated solution
where,
Step 6: Ant colony operator: Then, further, improve the solution; the solutions are again updated using the ACO algorithm. Using this way, easily find out the global optimum. Ant colony optimization is a population-based metaheuristic approach focused on authentic ant hunting behavior. They go on the hunt for nourishment and find the lowest routes between their nest to the food source. In ACO, two types of updations are available namely, local trail updation and global trail updation.
As the ant traverses among nodes, the quantity of pheromone on the border is updated using the equation below:
where,
where n denotes the number of nodes, and Ln denotes the overall duration travelled among all nodes, as determined by one of the building heuristics.
When all of the ants have finished all of the nodes, the shortest path updates the edges along its journey using the equation below:
where, L+ is the length of the best path generated by one of the ants. The steps are repeated until the optimal fitness function is attained. The selected path is given to the data transmission process.
Step 7: Termination Criteria: Only when the maximal quantity of repetitions has been reached and the solution with the highest fitness score has been chosen and declared as the best path for communication does the algorithm stops. The selected path is utilized for communication once the greatest fitness is achieved using the ACO-ABC algorithm. The flowchart ACO-ABC is given in Fig. 4.
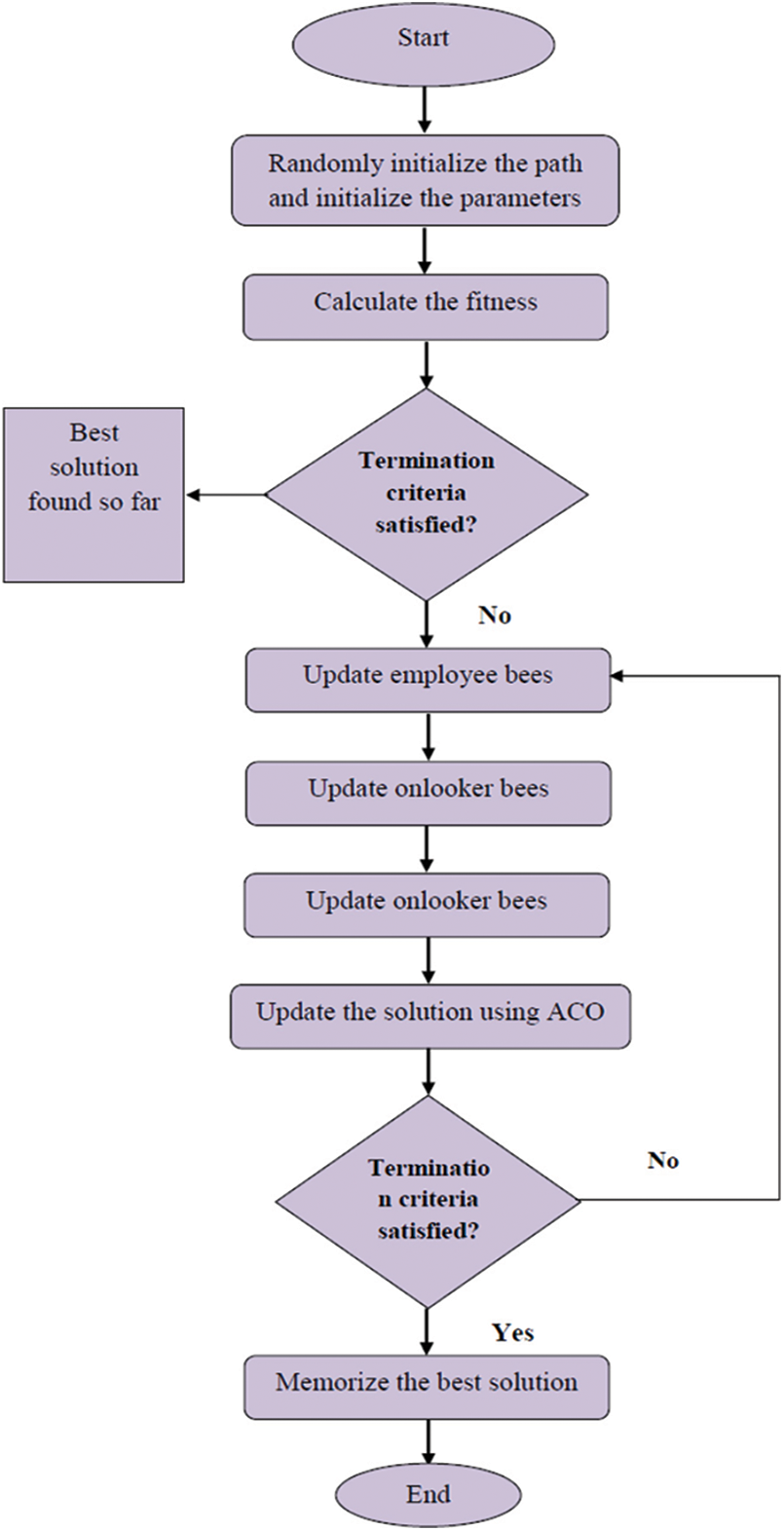
Figure 4: Flowchart of ACO-ABC algorithm
The experimental result of the proposed mobility-aware zone-based routing in MANET is analyzed in this section. For simulation, an urban traffic scenario with a random street configuration is utilized. For experimentation, the number of vehicles has been set to 25, 50, 75, and 100 in the 1500 × 1500 m2 area. The proposed methodology is implemented in NS2.
The performance of the proposed approach is analyzed based on different metrics namely; End to end delay, delivery ratio, overhead, and throughput.
End To End Delay: It reflects the time when a transmission source is sent to a target.
where,
Packet Delivery Ratio: Along with the quantity of packets provided by the receiver, the proportion of packets that adequately deliver a particular goal.
Throughput: Is the evaluation of the amount of data that should be sent from an origin to a conclusion.
Overhead: The amount of duration it requires to send data through a bundle traded network. Each bundle necessitates the storage of additional bytes of arrangement data in the parcel header, which, when combined with the collecting and disassembly of parcels, reduces the overall communication velocity of the raw material.
To prove the performance of the proposed methodology, the proposed method was compared with different two algorithms namely, AODV-based routing and AMODV-based routing. For performance analysis, four parameters are analyzed namely, end-to-end delay, packet delivery ratio, overhead, and throughput.
In Fig. 5, the proposed methodology’s performance is evaluated in terms of end-to-end delay. The x-axis depicts the number of cars, while the y-axis depicts the time. When compared to existing approaches, the proposed strategy delivers better results in Fig. 5. Because of the zone framework and the ACO-ABC-based optimal route selection procedure, this is the case. The optimal path selection process aids in the speed of end-to-end data transmission. The hybridization algorithm discards the broken paths. This reason allows the proposed method to produce end-to-end delay output.
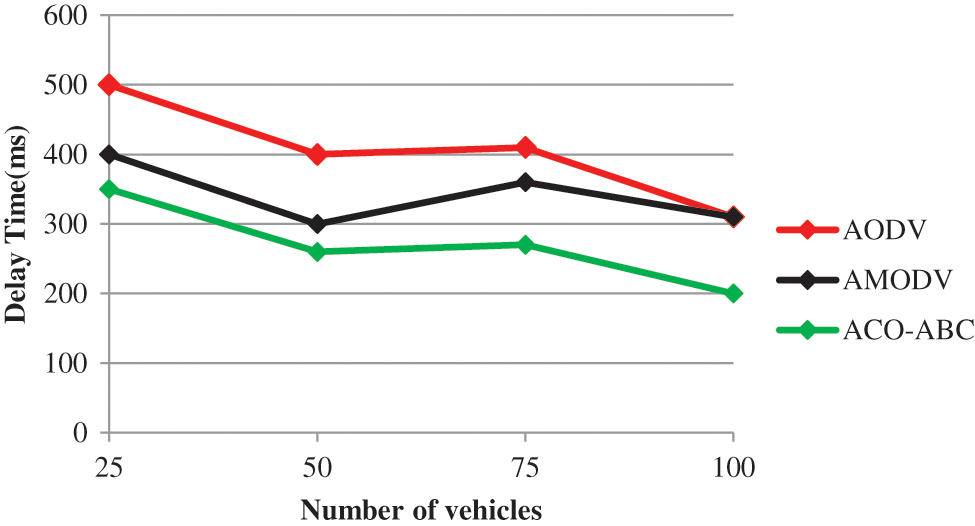
Figure 5: Comparative analysis based on end to end delay by varying number of vehicles
Fig. 6 shows a quantitative study depending on the packet delivery ratio by adjusting the number of vehicles. The proposed method did not exhibit a decent delivery ratio when there were fewer vehicles in the system. A good system has a high delivery ratio. As the system size grows and a vehicle’s neighbors grow, the suggested mobility-aware routing method outperforms existing algorithms in terms of delivery ratio. This is because, unlike AODV and AMODV, the bees can choose from numerous routes instead of a single path.
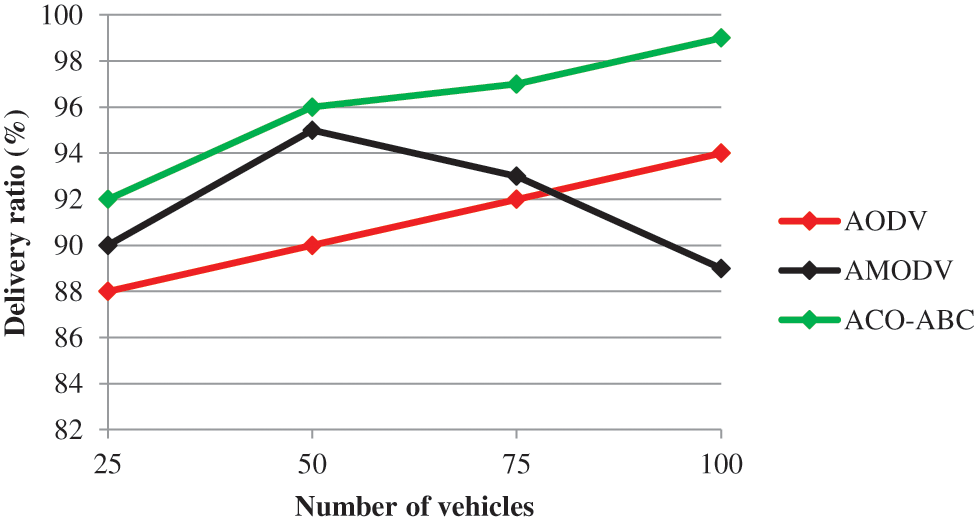
Figure 6: Comparative analysis based on packet delivery ratio by varying number of vehicles
The routing overheads of recommended and existing routing techniques are shown in Fig. 7. AODV, sometimes known as AOMDV, is a reaction protocol that has no conception of zones. The described technique, on the other hand, is only effective within a zone. Routing within the zone is kept up to date by transmitting control information regularly. This is a significant source of inefficiency in the described methodology. As the system grows larger, there are more options for routes to a vehicle’s location, indicating that the algorithm is multi-route.
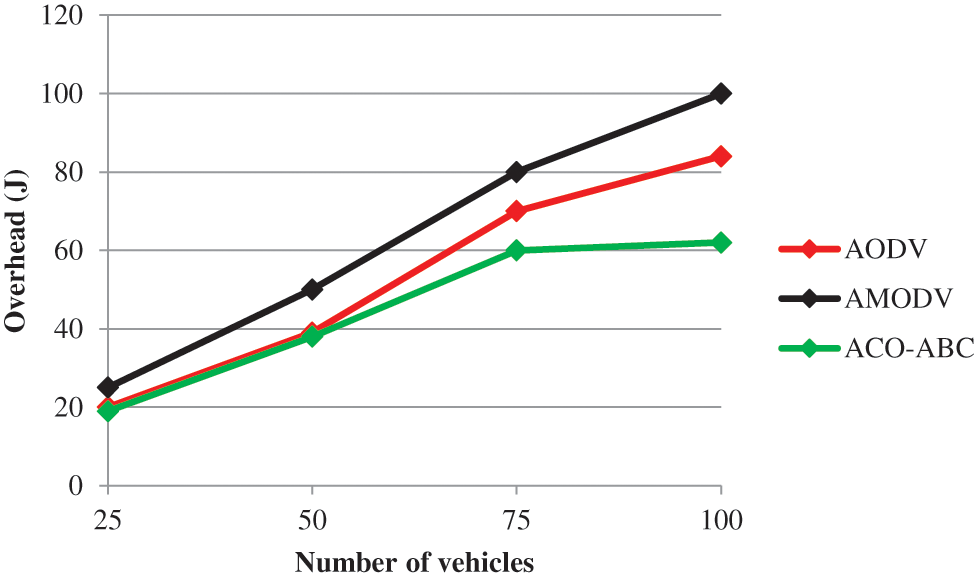
Figure 7: Comparative analysis based on overhead by varying number of vehicles
Comparative analysis by the number of different vehicles is given in Fig. 8. Here, the number of vehicles varies the radius of the simulation area and zones remain unchanged. As a result, as the quantity of vehicles in a region grows, so does the quantity of vehicles within that region, resulting in a greater density of vehicles within that region. The higher the obtained packet rate, the better the data effectiveness. These outcomes are extremely equivalent to those described for received packets in Fig. 8, the higher the obtained packet rate, the better the info effectiveness.
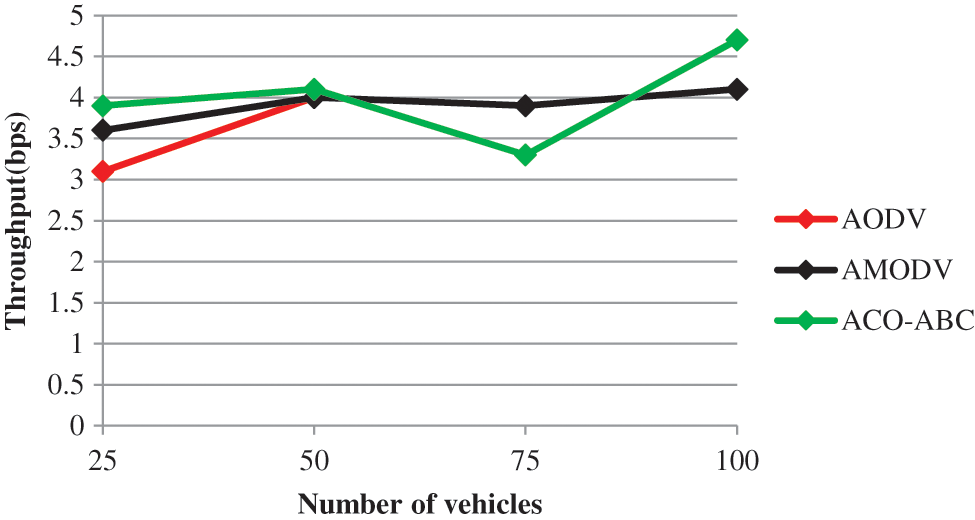
Figure 8: Comparative analysis based on throughput by varying number of vehicles
In Fig. 9, a comparative analysis based on delivery ratio by varying zone radius is analyzed. In Fig. 9, the zone radius is increased from 2 to 10. As the number of vehicles increases, the delivery ratio also increases. From Fig. 9, 100 vehicles with a zone radius of 10 show a high delivery ratio.
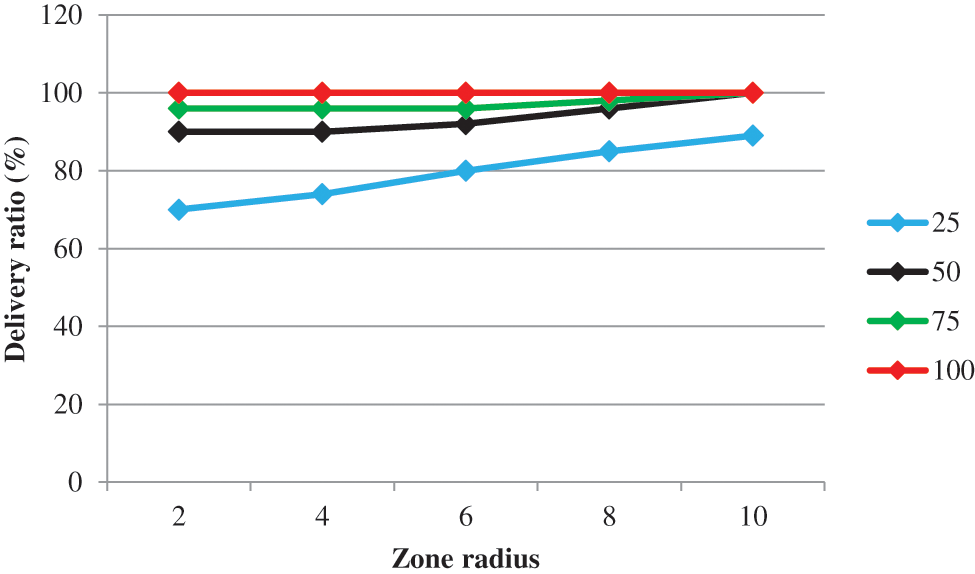
Figure 9: Comparative analysis based on delivery ratio by varying zone radius
Comparative assessment depending on end-to-end latency by adjusting zone radius is described in Fig. 10. Sending messages over the system will take longer when the quantity of vehicles is 100 and the zone radius is 2. Transporting a packet would take less time if there were 100 vehicles and a zone radius of 10. This is due to the proposed mobility awareness zone-based routing’s ability to receive and execute inside a zone by a high quantity of vehicles. As a result, Fig. 10 depicts a bigger quantity of vehicles and a larger zone radius, which is preferable to a smaller quantity of vehicles and a smaller zone radius in terms of end-to-end delay.
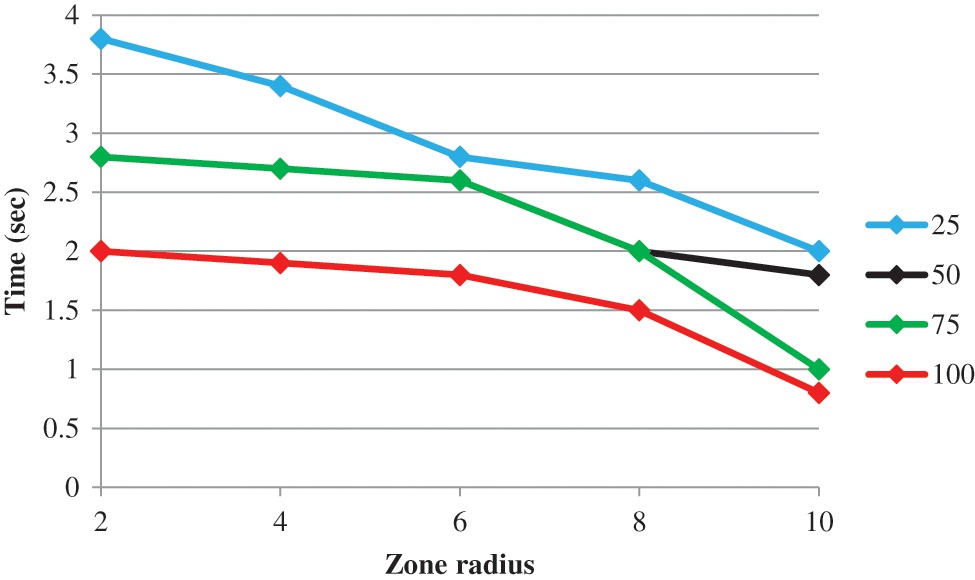
Figure 10: Comparative analysis based on end to end delay by varying zone radius
Fig. 11 shows a comparative study based on overhead by altering region radius from 2 to 10 and vehicle count. The proposed method achieved the least congestion on the network when the quantity of vehicles is 100 and the region radius is 2. If the region radius is 10 and the number of cars is 100, however, the strategy produces more congestion due to the increased number of vehicles constantly updating the routing table. Although the proposed routing method provides good network connectivity, it means more routes are available, which creates more controllable traffic. Therefore, from Fig. 11, it can be seen that there is a higher routing overhead as the number of vehicles and the region radius increase.
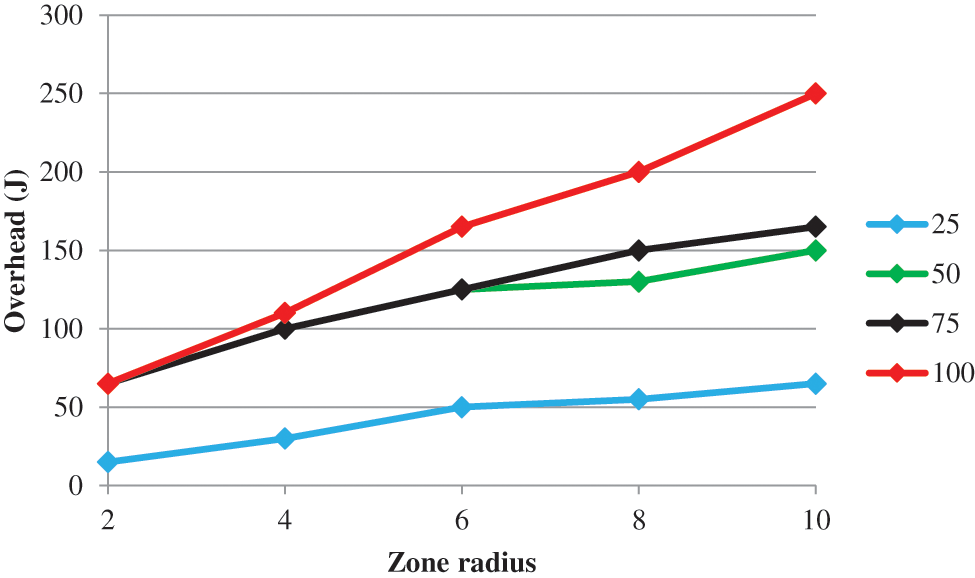
Figure 11: Comparative analysis based on overhead by varying zone radius
The proposed mobility-aware zone-based routing in VANET has been explained in this paper. To achieve the routing process, ACO-ABC algorithm has been proposed. The mathematical explanation of fitness function and routing has been developed. The effectiveness of the methodology has been analyzed in terms of different metrics. The proposed method had attained a higher delivery ratio and lesser end-to-end delay. Because of its multipath properties and good network connectivity, the proposed method attained better performance compared with an existing one. In the future, we will develop a real-time traffic system on VANET.
Acknowledgement: The author with a deep sense of gratitude would thank the supervisor for his guidance and constant support rendered during this research.
Funding Statement:The authors received no specific funding for this study.
Conflicts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. S. U. Rehman, M. Arif Khan, T. A. Zia and L. Zheng, “Vehicular ad-hoc networks (VANETs)-an overview and challenges,” Journal of Wireless Networking and Communications, vol. 3, no. 3, pp. 29–38, 2013. [Google Scholar]
2. M. Arif, G. Wang, O. Geman, V. E. Balas and P. Tao, “SDN-based VANETs, security attacks, applications, and challenges,” Applied Sciences, vol. 10, no. 9, pp. 3217, 2020. [Google Scholar]
3. M. Altayeb and I. Mahgoub, “A survey of vehicular ad hoc networks routing protocols,” International Journal of Innovation and Applied Studies, vol. 3, no. 3, pp. 829–846, 2013. [Google Scholar]
4. O. Senouci, Z. Aliouat and S. Harous, “MCA-V2I: A multi-hop clustering approach over vehicle-to-internet communication for improving VANETs performances,” Future Generation Computer Systems, vol. 96, no. 5, pp. 309–323, 2019. [Google Scholar]
5. F. Cunha, L. Villas, A. Boukerche, G. Maia, A. Viana et al., “Data communication in VANETs: Protocols, applications and challenges,” Ad Hoc Networks, vol. 44, pp. 90–103, 2016. [Google Scholar]
6. M. Mukhtaruzzaman and M. Atiquzzaman, “Clustering in vehicular ad hoc network: Algorithms and challenges,” Computers & Electrical Engineering, vol. 88, no. 11, pp. 106851, 2020. [Google Scholar]
7. C. Cooper, D. Franklin, M. Ros, F. Safaei and M. Abolhasan, “A comparative survey of VANET clustering techniques,” IEEE Communications Surveys & Tutorials, vol. 19, no. 1, pp. 657–681, 2016. [Google Scholar]
8. S. M. AlMheiri and H. S. AlQamzi, “MANETs and VANETs clustering algorithms: A survey,” in 2015 IEEE 8th GCC Conf. & Exhibition, Muscat, pp. 1–6, 2015. [Google Scholar]
9. R. Chai, B. Yang, L. Li, X. Sun and Q. Chen, “Clustering-based data transmission algorithms for VANET,” in 2013 Int. Conf. on Wireless Communications and Signal Processing, Hangzhou, pp. 1–6, 2013. [Google Scholar]
10. W. Ahsan, M. F. Khan, F. Aadil, M. Maqsood, S. Ashraf et al., “Optimized node clustering in VANETs by using meta-heuristic algorithms,” Electronics, vol. 9, no. 3, pp. 394, 2020. [Google Scholar]
11. A. Kumar, P. Dadheech, R. Kumari and V. Singh, “An enhanced energy efficient routing protocol for VANET using special cross over in genetic algorithm,” Journal of Statistics and Management Systems, vol. 22, no. 7, pp. 1349–1364, 2019. [Google Scholar]
12. H. Meidong, B. Yang, X. Ge, W. Xiang and Q. Li, “Reliable energy-efficient routing algorithm for vehicle-assisted wireless ad-hoc networks,” in 2018 14th Int. Wireless Communications & Mobile Computing Conf. (IWCMC), Limassol, pp. 1219–1224, 2018. [Google Scholar]
13. K. Ankit, P. Dadheech, R. Kumari and V. Singh, “An enhanced energy efficient routing protocol for VANET using special cross over in genetic algorithm,” Journal of Statistics and Management Systems, vol. 22, no. 7, pp. 1349–1364, 2019. [Google Scholar]
14. T. Jamal, S. Nesmachnow and E. Alba, “Fast energy-aware OLSR routing in VANETs by means of a parallel evolutionary algorithm,” Cluster Computing, vol. 16, no. 3, pp. 435–450, 2013. [Google Scholar]
15. S. Walhekar and M. Meenakshi, “Energy and time efficient routing protocols for high throughout VANET,” International Journal on Future Revolution in Computer Science & Communication Engineering, vol. 4, no. 5, pp. 116–119, 2018. [Google Scholar]
16. T. Baker, J. M. García-Campos, D. G. Reina, S. Toral, H. Tawfik et al., “Greeaodv: An energy efficient routing protocol for vehicular ad hoc networks,” in Int. Conf. on Intelligent Computing, pp. 670–681, 2018. [Google Scholar]
17. S. Shafi and D. V. Ratnam, “A cross layer cluster based routing approach for efficient multimedia data dissemination with improved reliability in VANETs,” Wireless Personal Communications, vol. 107, no. 4, pp. 2173–2190, 2019. [Google Scholar]
18. M. Oche, A. B. Tambuwal, C. Chemebe, R. Noor and S. Distefano, “VANETs QoS-based routing protocols based on multi-constrained ability to support ITS infotainment services,” Journal of Wireless Networks, vol. 26, no. 3, pp. 1685–1715, 2020. [Google Scholar]
19. X. Sun, L. Dai, X. R. Zhang, P. S. Chang and X. Z. He, “RSOD: Real-time small object detection algorithm in UAV-based traffic monitoring,” Applied Intelligence, vol. 52, pp. 1–16, 2021. [Google Scholar]
20. Y. Mao, K. Li and D. Mao, “Application of wireless network positioning technology based on GPS in geographic information measurement,” Journal of New Media, vol. 2, no. 3, pp. 131–135, 2020. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools