Materials Processing
| Fluid Dynamics & Materials Processing |
DOI: 10.32604/fdmp.2021.014249
ARTICLE
A CFD Study on a Biomimetic Flexible Two-body System
Faculty of Mechanical Engineering and Automation, Zhejiang Sci-Tech University, Hangzhou, 310018, China
*Corresponding Author: Yuzhen Jin. Email: gracia1101@foxmail.com
Received: 13 September 2020; Accepted: 07 February 2021
Abstract: By studying the characteristics of the flow field around a swimming fish, useful insights can be obtained into the superior swimming capabilities developed by nature over millions of years, in comparison to what can be achieved using the standard engineering principles traditionally employed in naval and ocean engineering. In the present study, the flow field related to a single joint fish model is simulated in the framework of a commercial computational fluid dynamics software (ANSYS Fluent 18.0). The principle of the anti-Kármán vortex street is analyzed and the relationship between the direction of the tail vortex and the direction of the fin swing is determined according to the vortex structures and the pressure distribution. A parametric investigation is finally conducted to analyze in particular how the Strouhal number (St) can affect the fish propulsive performance and efficiency.
Keywords: Single joint fish; numerical calculation; propulsion efficiency; anti-Kármán vortex street
Fishes has developed excellent swimming skills to adapt environment through millions of years of evolution [1], therefore fish swimming can be a source of inspiration for the development of underwater vehicles [2,3]. Although the underwater submarine has good maneuverability [4], its propulsion efficiency can be further improved by bionic modeling. Bionic engineers have been working on the morphological characteristics and hydrodynamic performance of fish swimming for decades. In general, fish swimming is a process in which objects and fluids interact with each other. Most fishes swim with Body and/or Caudal Fin (BCF) pattern [5]. In this pattern, the tail of the fish swings and undulates regularly to create a series of vortex to gain thrust forward, while the body of the fish wobbles slightly to maintain stability [6,7].
The propulsion efficiency and performance of fish body is analyzed with certain kinematic parameters. Previous studies have indicated that the structure and stiffness of caudal fin play important roles [8–11]. Sfakiotakis et al. [7] concluded that the caudal fin provides 90 percent of the propulsion. Walker et al. [12] found out a better body fineness ratio can significantly reduce drag and improve swimming performance. Moreover, by studying the flow field pattern around fish body and fish tail, Zhao et al. [13] found that the separated caudal tail can greatly improve the propulsion performance. Li et al. [14] developed tree-like/structure model and serial-like/structured model to mimic fish undulation. By using several rigid elements to represent the flexible fish body, simple fish model can be built to explore the principle of fish swimming, and meanwhile the computation time is saved vastly.
Propulsive mechanism of single joint fish have been studied in the past by experiments and numerical simulation as well as flow around airfoils and cylinders [15,16], while there are still lots of morphological, behavioral and environmental complexities which may hinder researcher to reach the inherent mathematical principle [17–20]. In the present study, computational fluid dynamics (CFD) simulations are carried out to explore the fluid dynamic characteristics of a simplified fish model. To simplify the aforementioned serial-like/structured model, a single joint fish model which consists of fish body and caudal fin is built. In the past, relevant studies have been done in-depth on single-joint and double-joint robotic fish, and experiments have also verified the feasibility of this kind of model [21,22]. With different values of Strouhal number (
In this paper, fish model is presented and simplified and its kinematics is also described, followed by the description of the numerical method and the parameter setting in Section 2. To save computation time and increase computation accuracy, the grid independence is presented to choose the best model with suitable grid. The pressure contours and vortex structures are given to explore the principle of anti-Kármán vortex street in Section 3. Base on this, different conditions of fish swimming are simulated to analyze the effect of Strouhal number (
The geometric model in current study is two-dimensional. As shown in Fig. 1, this model is consisted of a fish body and a fish tail, and both of them can be either rigid or deformable. These elements are connected with one virtual hinge. At the hinge, there is only one degree of freedom of rotating motion about z axis. Prescribed rotation velocity can be provided at hinge so that the fish tail will rotate by the hinge.
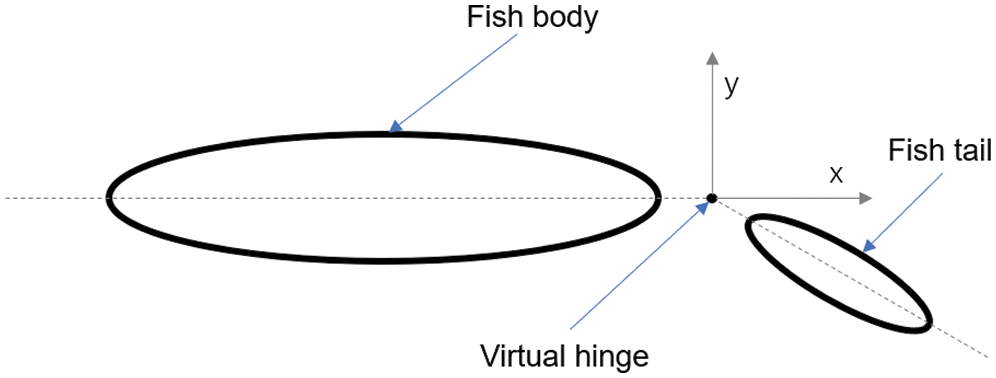
Figure 1: Two-segment fish model in current simulation
To reduce the amount of computation cost, we have simplified this simulation model, the caudal fin (fish tail) is considered as rigid rather than flexible and additional fins are neglected. In addition, three-dimensional (3-D) flow effects of the surrounding water are not considered.
2.2 Mathematical Model and Numerical Method
ANSYS Fluent 18.0 is used to carried out the simulation. The fluid motion is governed by incompressible continuity and moment equations as:
where u is fluid velocity vector, p is fluid pressure,
The dynamic mesh feature is used with smoothing, layering and remeshing methods. The swing of caudal fin is realized by user-defined function (UDF). The fluid domain is set as 0.8 m × 1.5 m. The length of fish body and caudal fin are 0.06 m and 0.03 m, respectively, the whole fish is 0.093 m (including the gap between body and caudal fin). The geometry and mesh arrangement are shown in Fig. 2. The inlet boundary condition is set as velocity-inlet to control different velocities of inflow. The outlet boundary is set as outflow, and others are set as static wall surface.
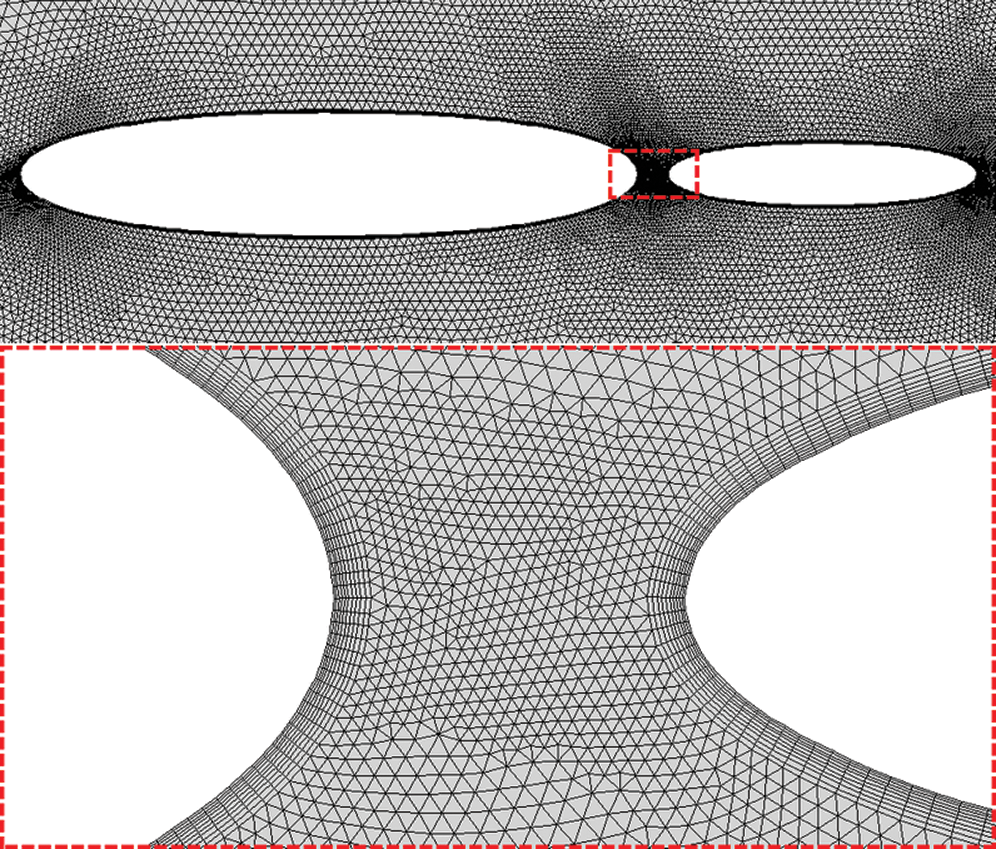
Figure 2: Body fitted mesh around current two-segment fish model
The fluid motion is solved with COUPLED algorithm as pressure-velocity coupling scheme to calculate non-stationary problems [14]. The first-order implicit transient formulation is adopted for the transient terms. For the spatial discretization option, the Least Squares Cell Based approach is employed for the gradient. To improve calculate accuracy, a second-order scheme is used for pressure interpolation and a second-order upwind scheme is selected for diffusive term discretization. In calculation setting, to avoid generating negative grid during the model movement, the time step is set as 0.001 s [13]. The max iteration number is 4000, and the convergence is assumed with all residual errors are less than
It is known that the caudal fin provides the major thrust force, and the flapping motion of caudal fin play a crucial role in propulsion performance. The kinematic motion of caudal fin is defined in UDF code. Generally, the motion of caudal fin can be described as a sinusoidal function:
In the above Eqs. (3) and (4),
The length of the entire fish is L, and the fish body length and caudal fin length are
When the fish-like model is swinging, there are two vital nondimensional parameters under consideration, i.e., the Strouhal number (
where
The propulsive efficiency can be expressed as the following equation [24]:
To study the efficiency (
where
A validation case was carried out on a 2-D foil model as shown in Fig. 3, which has been reported in our previous work [25]. The 2-D foil model undergoes a prescribed heave motion while freely movement in x-direction [26]. The foil motion is also realized with dynamic mesh feature and inhouse developed UDF code. The induced velocity (non-dimensionlized as Reu) with heave frequency (non-dimensionlized as Refr) is compared to Alben & Shelly’s results [26], and it shows good results especially in low Refr region.
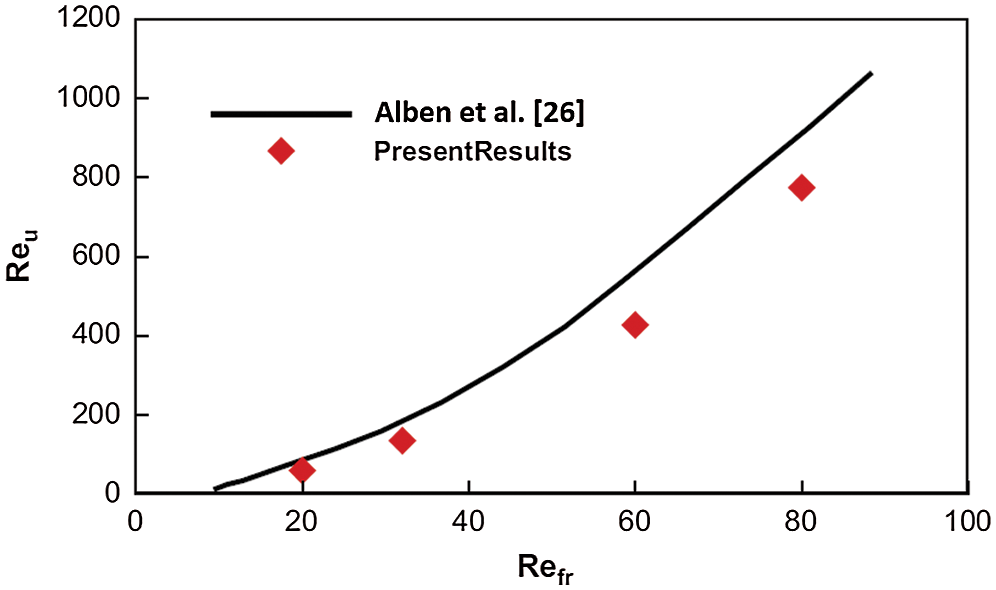
Figure 3: Comparation with previous work [26]
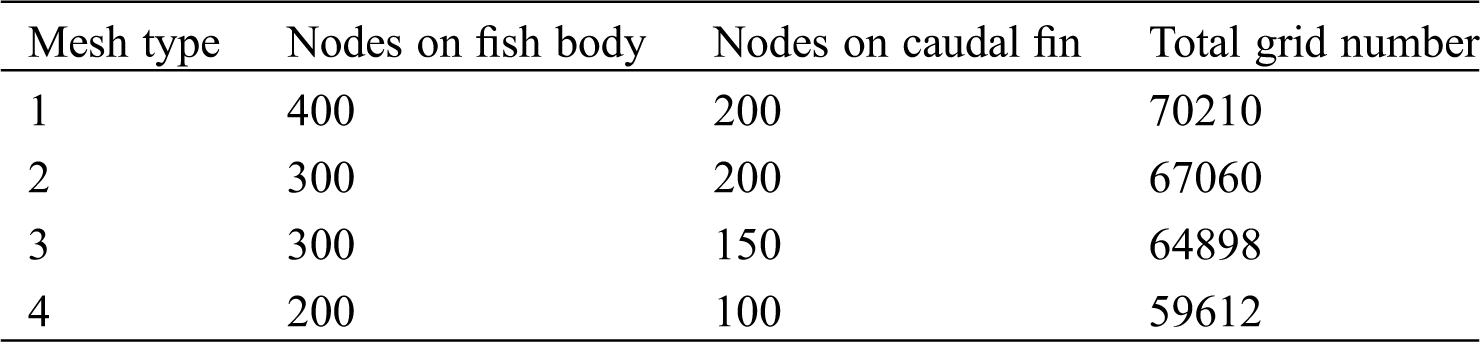
The quality of mesh has great effects on the time consuming and accuracy of the simulation. In this model, the parameters are:
Table 1: Information of different mesh types of fish model
10 oscillating cycles are simulated and each cycle has 2000 time-steps to make sure it is short enough to meet the calculation accuracy required by dynamic mesh. Figs. 4 and 5 show the time histories of the
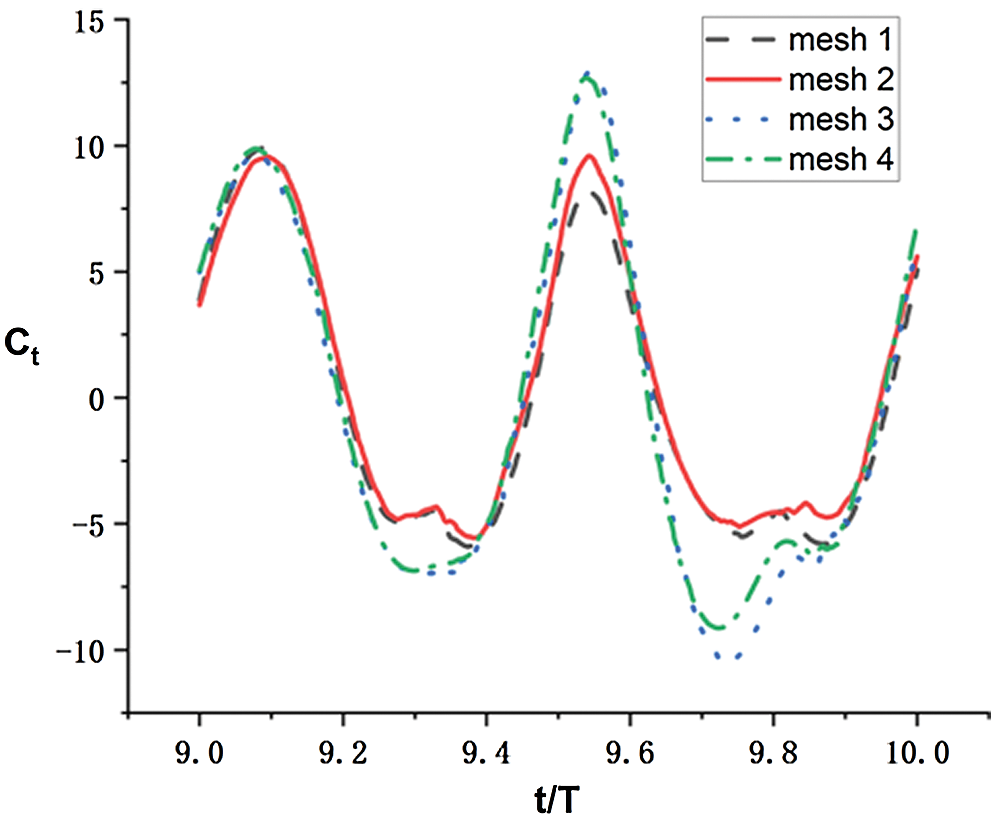
Figure 4: Comparation of thrust coefficient (
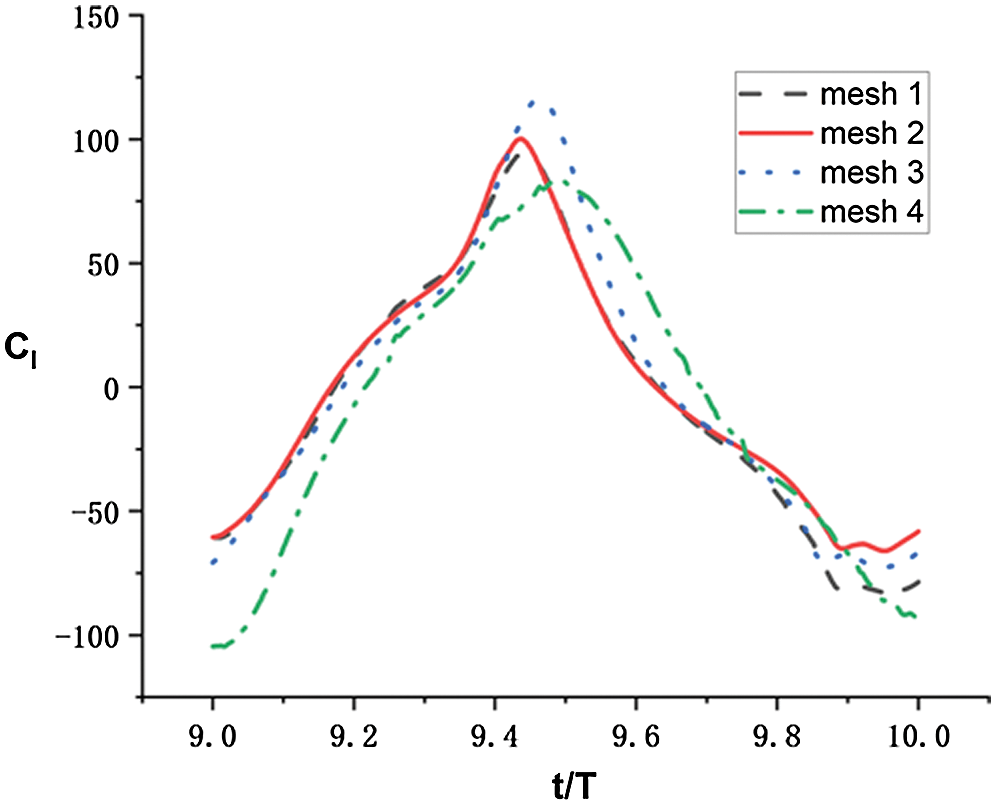
Figure 5: Comparation of lift coefficient (
3.2 Principle of Anti-Kármán Vortex Street
In the subsection, we will first explain the principle of fish swimming with respect to anti-Kármán vortex street. A working condition based on Eqs. (3) and (4) is chosen to study this principle, Tab. 2 shows the selection of parameters.
Table 2: Parameter selection of current simulation

Figs. 6 and 7 respectively show the pressure contour and vortical contour around swimming fish model. The flow structures are detailed as follows:
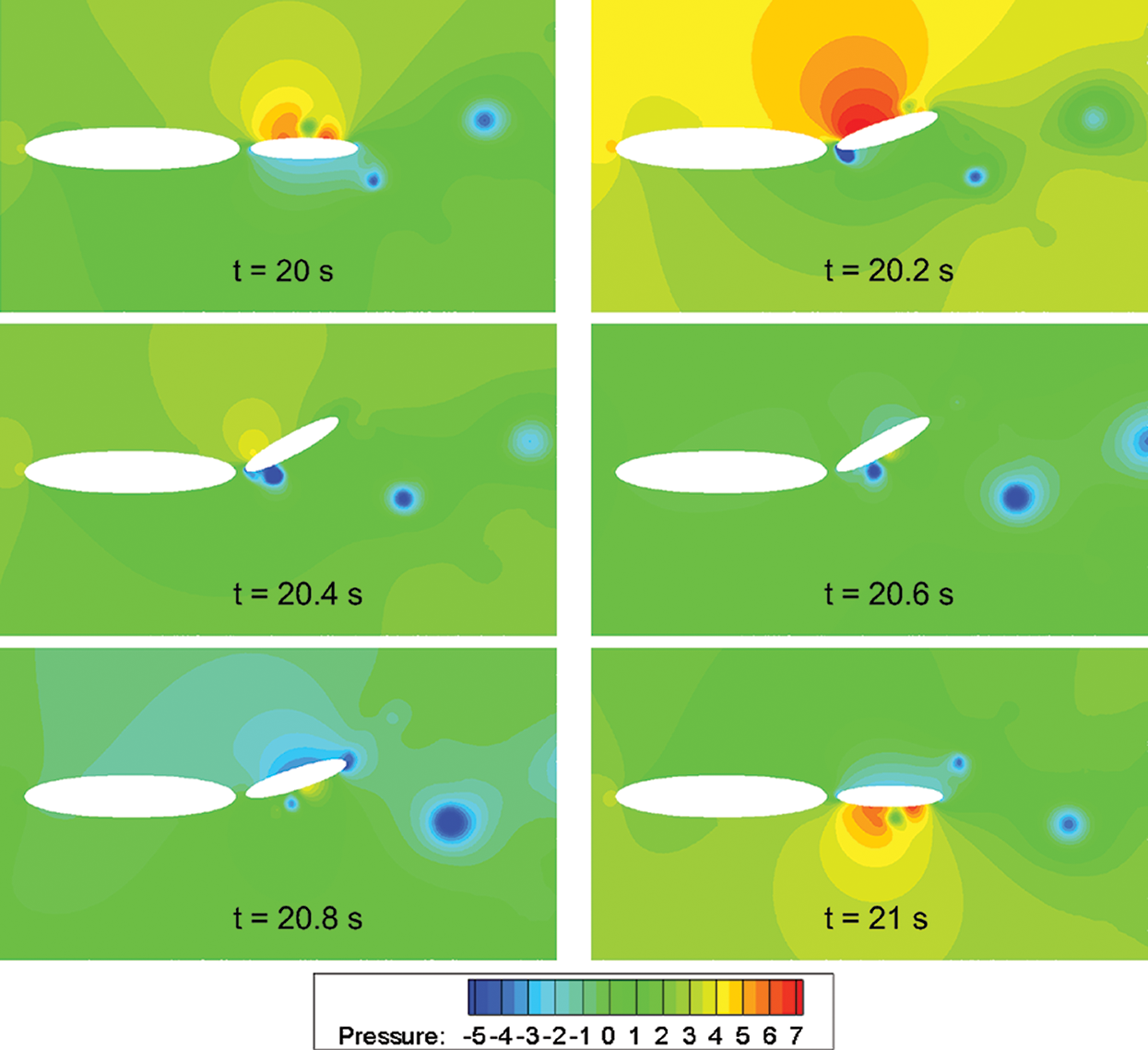
Figure 6: Pressure contours around the two-segment fish model at different time instances
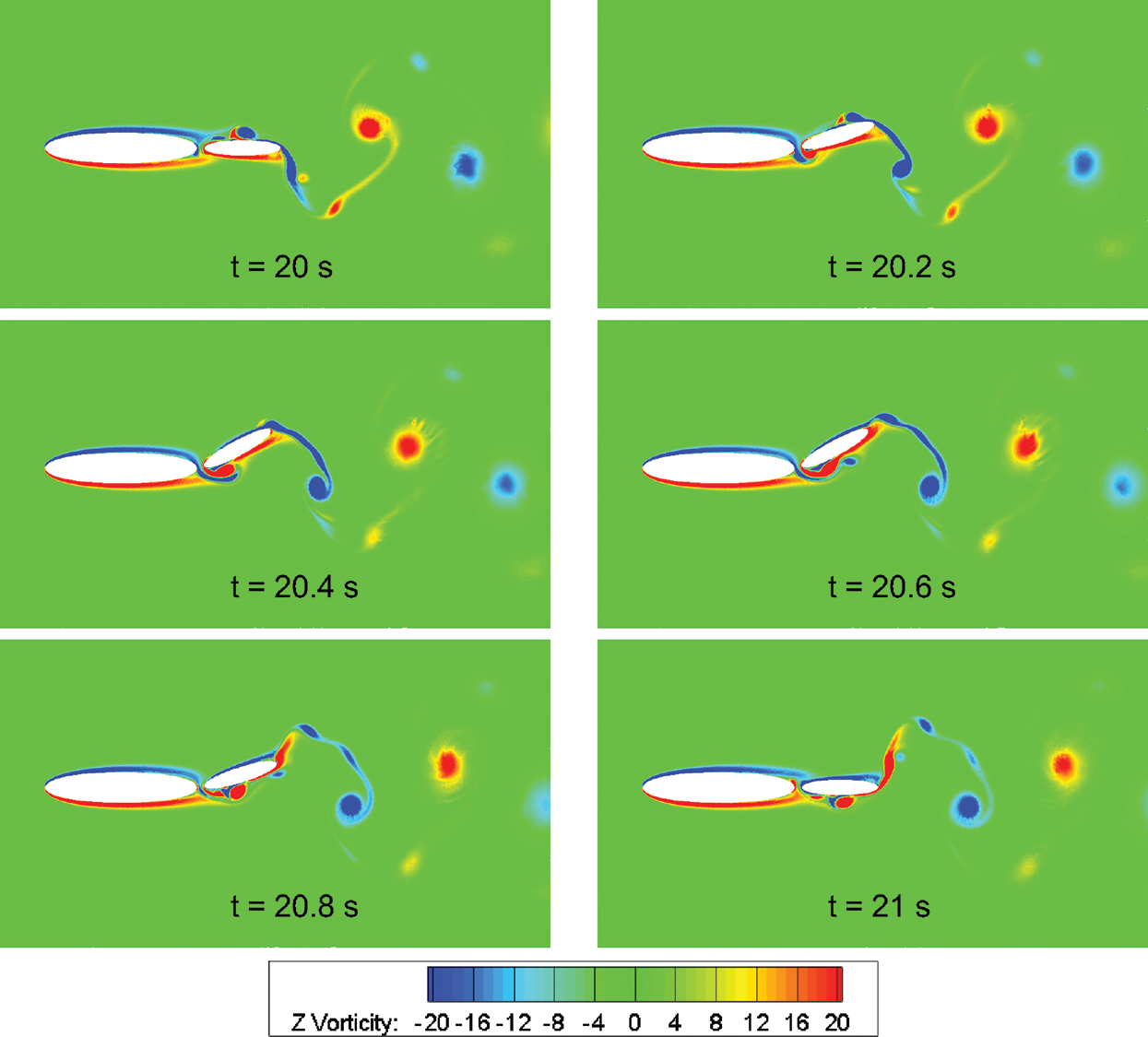
Figure 7: Vorticity contours around the two-segment fish model at different time instances
At t = 20 s, this model is swinging forward, and the caudal fin is at its starting position. In this movement, the caudal fin rotates around the virtual hinge to push the fish body forward in the negative direction of the x-axis. Due to the fish tail swing, there is a high-pressure zone on the upside of the caudal fin, and a low-pressure zone on the underside due to existing lower pressure. At this time instance, there are two tail vortexes behind the caudal fin.
During t = 20.2 s–20.4 s, the caudal fin is swinging up. The fluid pressure on the underside of the caudal fin continued to decrease, and began to move backward. The upper high-pressure region is largest at t = 20.2 s, then it will begin to shrink.
After that, the caudal fin moves to the maximum swing position. The low-pressure region on the upside of the caudal fin turns to be the largest, and the high-pressure region has been weakened. Then the caudal fin starts to swing back, the low-pressure region on bottom of the caudal fin becomes weak, and formed a high-pressure region beside the low-pressure region.
During t = 20.6 s–20.8 s, the low-pressure region of the caudal fin continues to be weakened. The upside of caudal fin began to form a low-pressure region. Then it continues to expand and to move to the end of caudal fin.
At t = 21 s, the caudal fin is back to the initial position. The low-pressure region moves downward from caudal fin and formed a tail vortex.
Moreover, during t = 20 s–20.4 s, the caudal fin is swinging counterclockwise. The underside of the caudal fin formed a low-pressure region and expanded continuously. As the caudal fin keeps swinging to the maximum swing angle, the high-pressure region on the upside of caudal fin continues to weaken at the maximum swing angle. During t = 20.6 s–21 s, the caudal fin is swinging clockwise. Its upside forms a low-pressure region and it is kept expanding. At the same time, the underside forms a high-pressure region. When it near to initial position, the new vortex sheds off. It can be seen from Fig. 7, during the fish swing, it generates two vortexes in a cycle. When caudal fin swings counterclockwise, it will form a tail vortex rotating clockwise. When it swings clockwise, there will be a tail vortex rotating counterclockwise. This is the principle of anti-Kármán vortex street, and fishes can swim forward because the generation of tail vortex produce the forward thrust.
3.3 Effects of Strouhal Number and Reynolds Number
The principle of fish swimming has been explored, then we are going to find out how different parameters affect the thrust of fish swimming and the efficiency. In this subsection, effects of
Choosing different inlet velocity of flow, we can obtain several conditions (cases) with different
Table 3: Parameter selections for five conditions with different
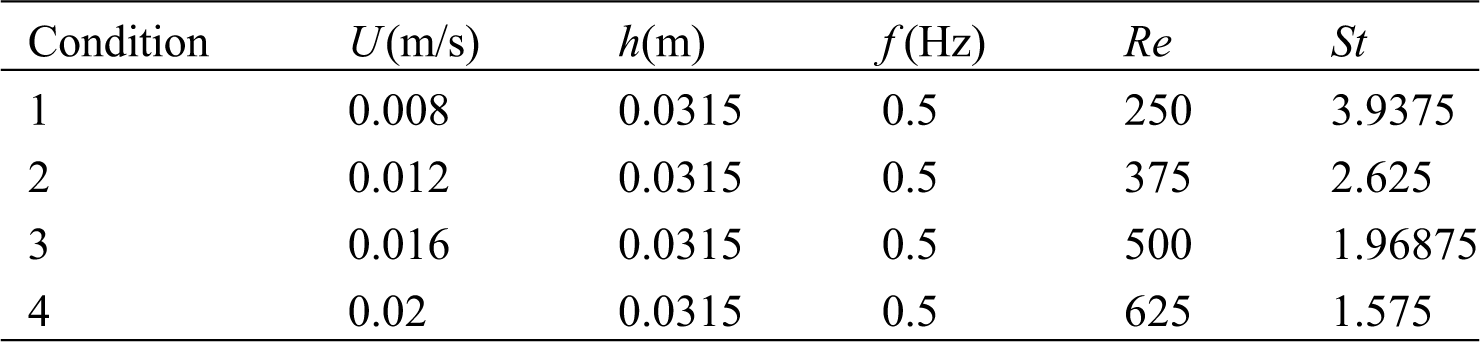
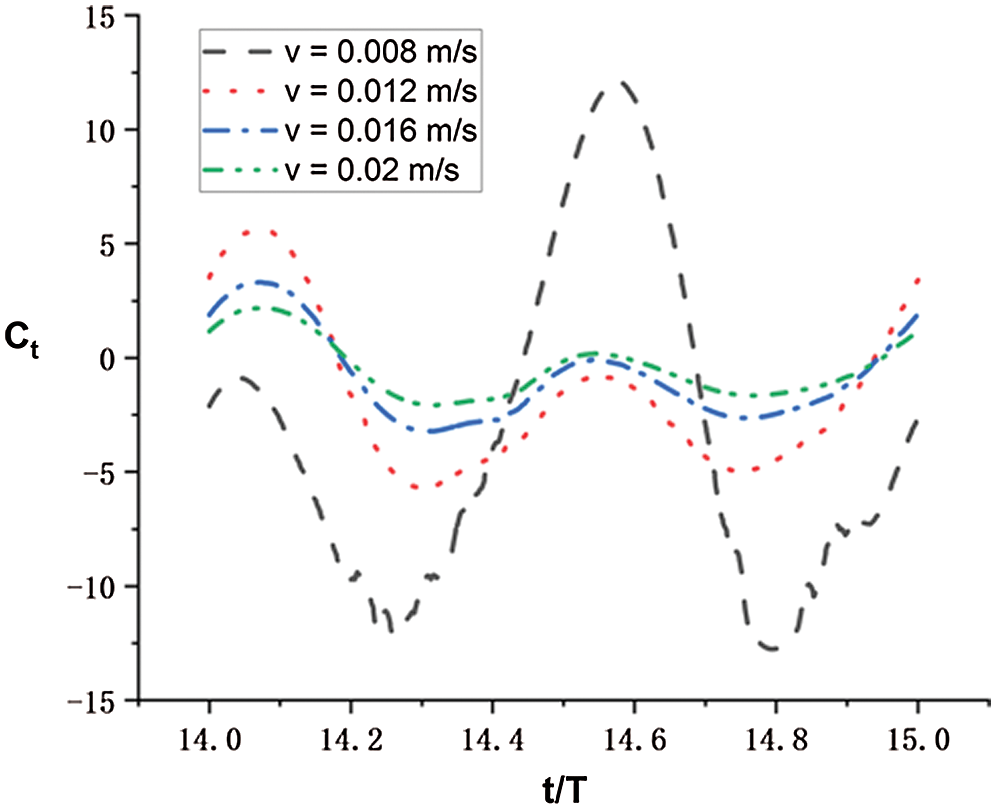
Figure 8: Thrust coefficients in a single period of the fish model for conditions with different
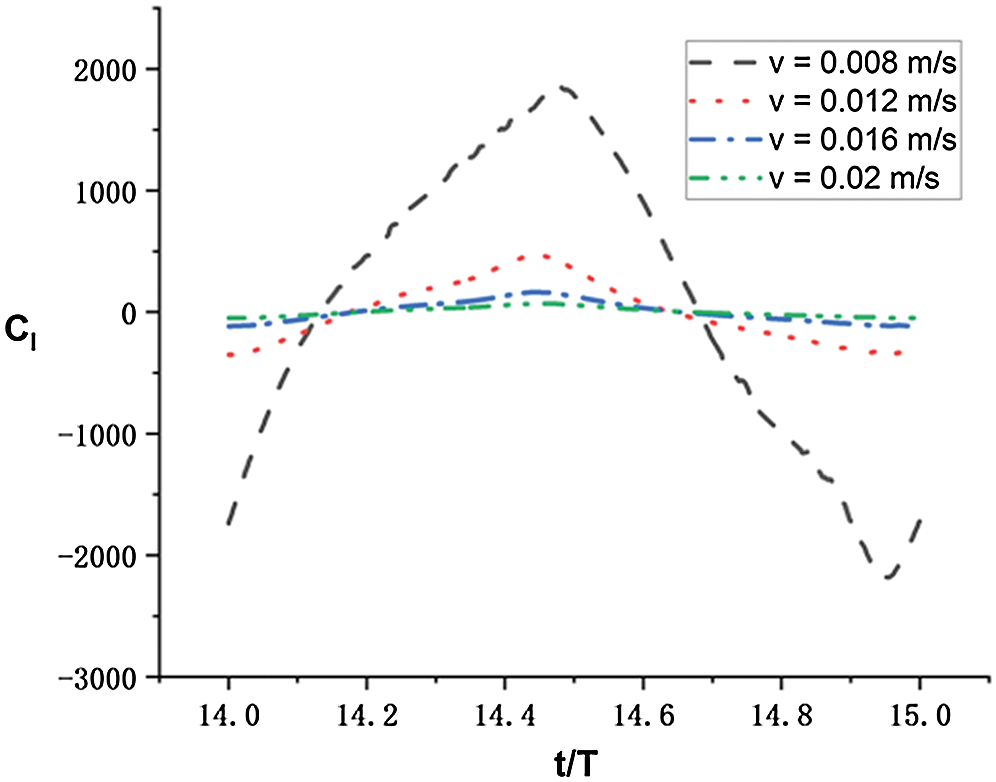
Figure 9: Lift coefficients in a single period of the fish model for conditions with different
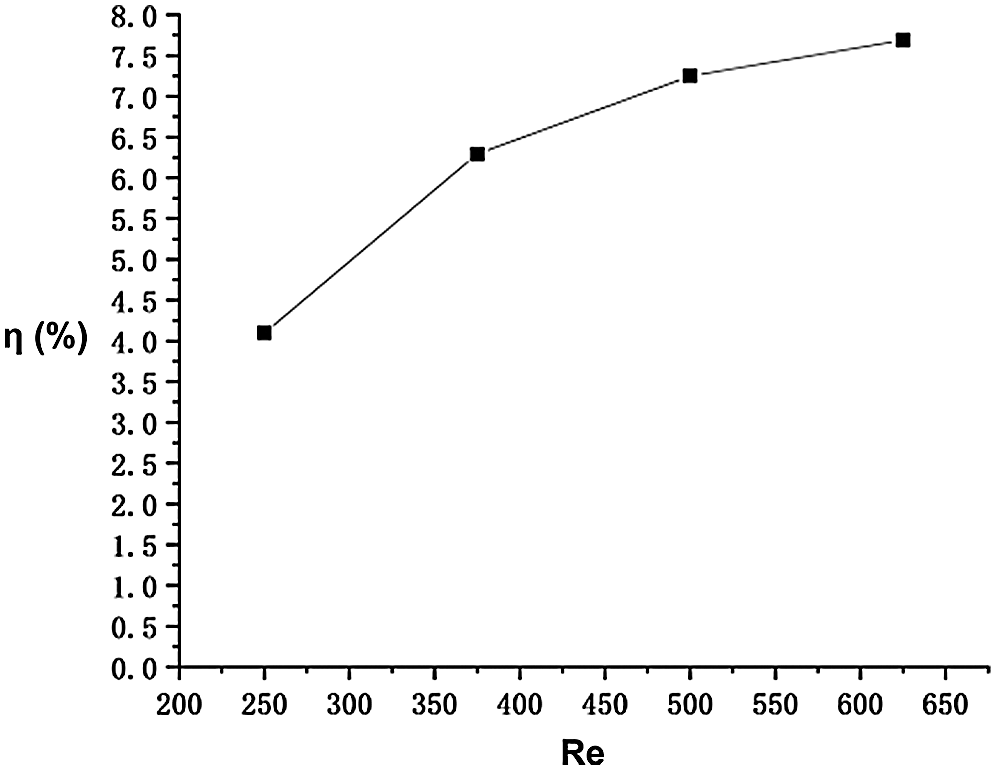
Figure 10: Propulsive efficiencies of the fish model for conditions with different
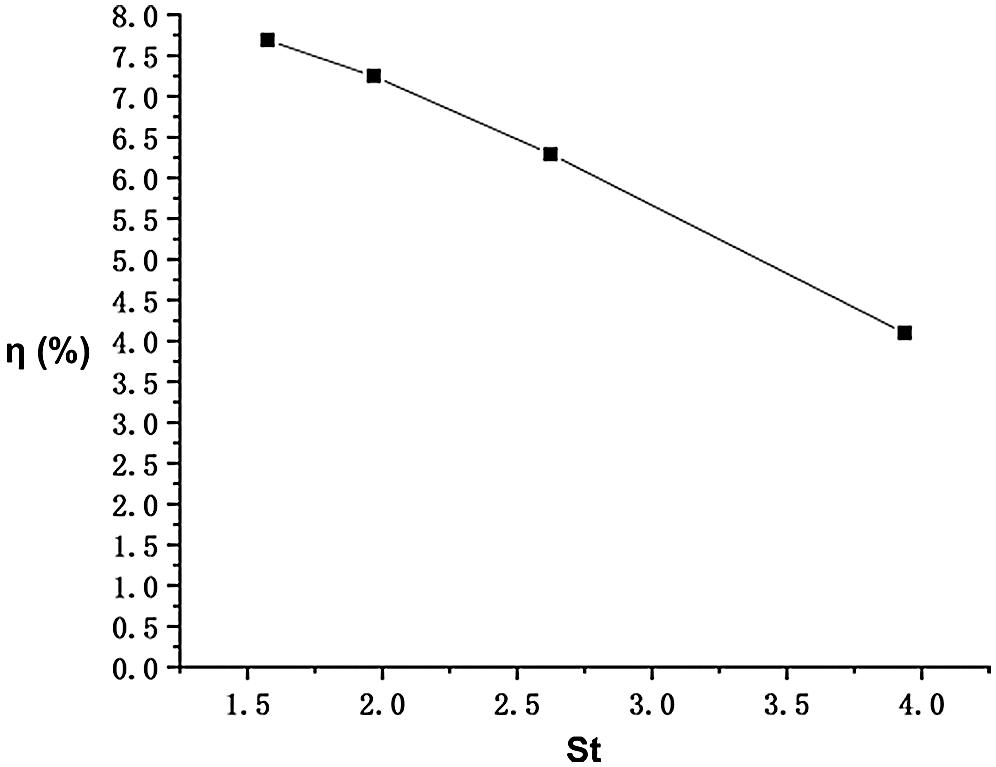
Figure 11: Propulsive efficiencies of the fish model for conditions with different
We can find from the results that the thrust coefficient
Secondly, in this part we mainly explored that how
Table 4: Parameter selections for six conditions with different
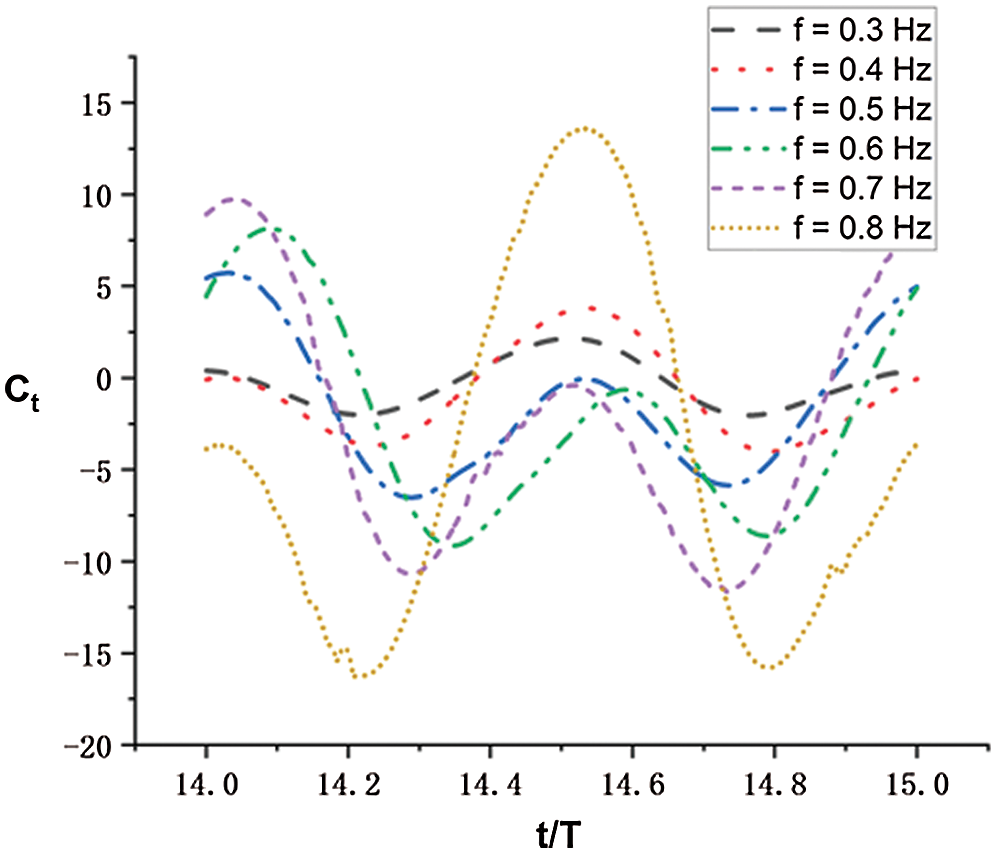
Figure 12: Thrust coefficients in a single period of the fish model for conditions with different
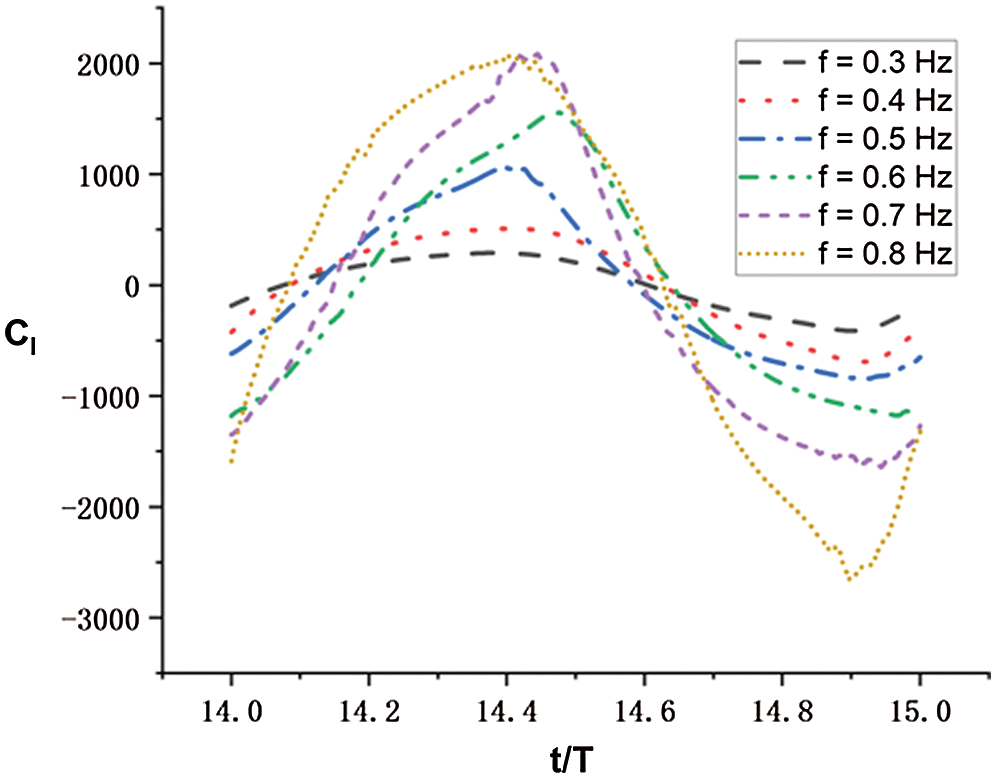
Figure 13: Lift coefficients in a single period of the fish model for conditions with different
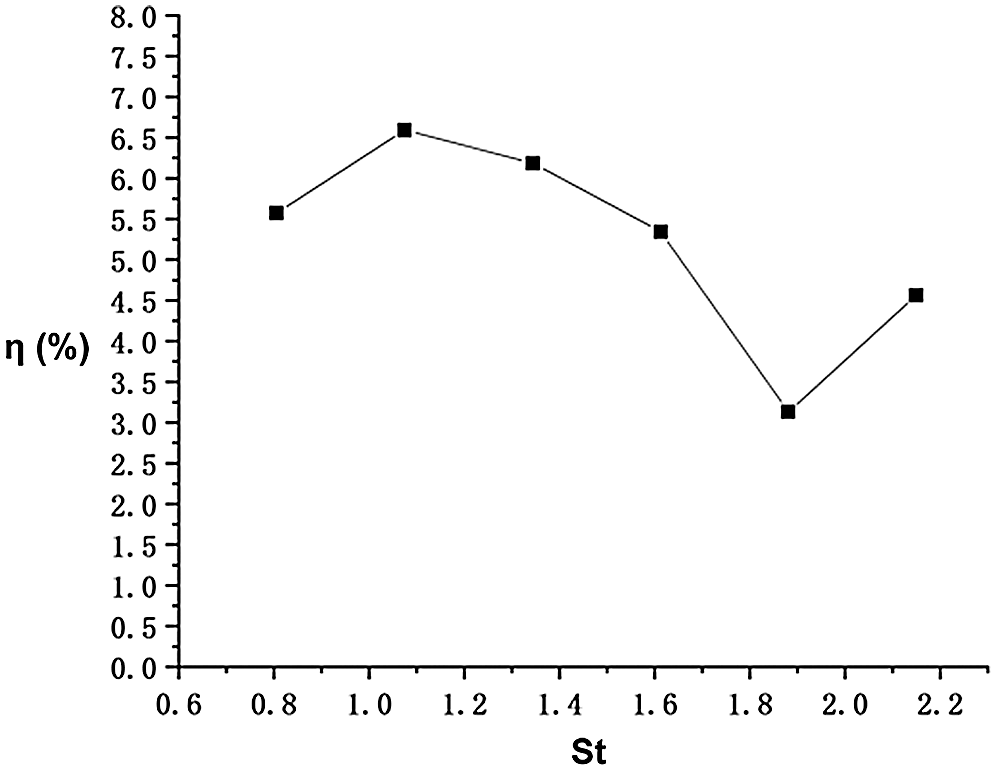
Figure 14: Propulsive efficiencies of the fish model for conditions with different
Moreover, cases with a larger heave amplitude are also studied, and the parameters for these cases are given in Tab. 5, and relevant results are shown in Figs. 15–17.
Table 5: Parameter selections for seven conditions with different
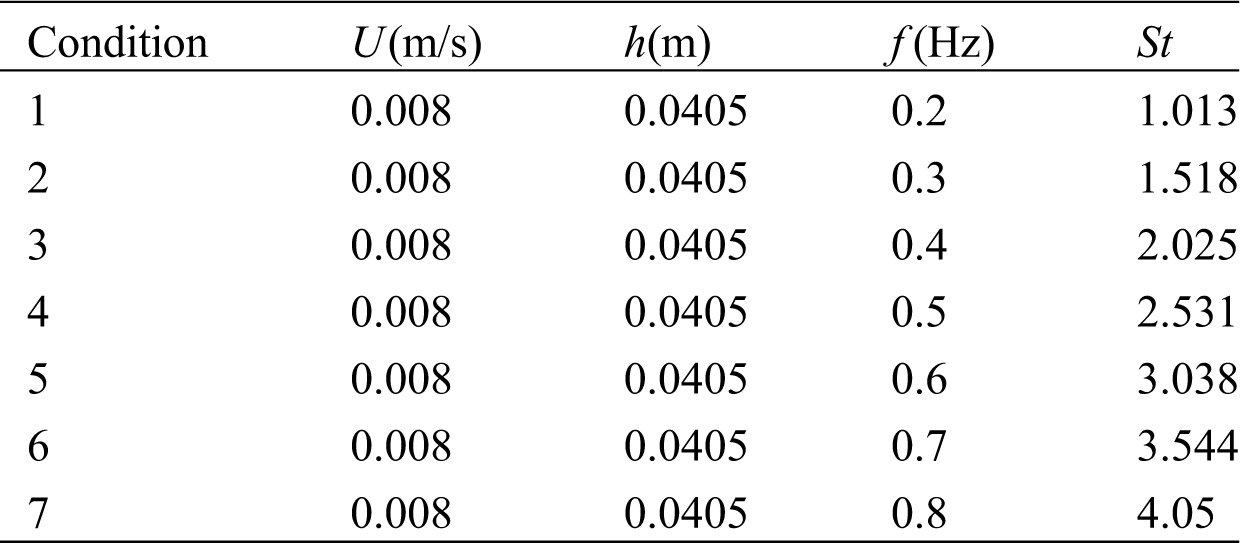
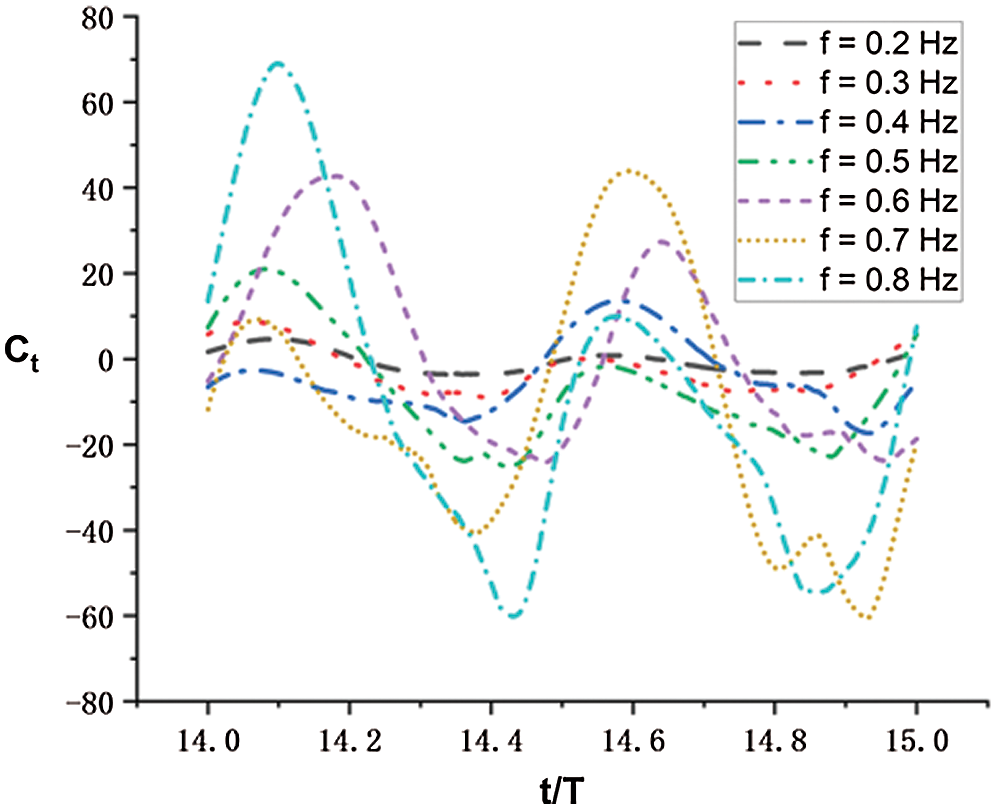
Figure 15: Thrust coefficients in a single period of the fish model for conditions with different
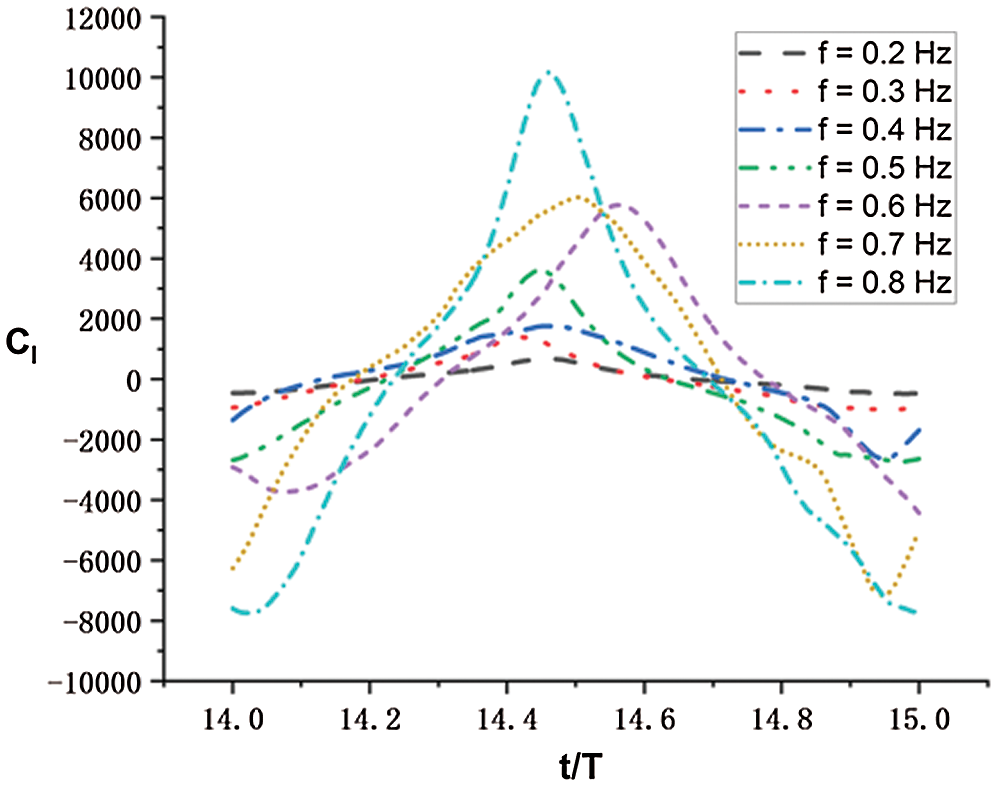
Figure 16: Lift coefficients in a single period of the fish model for conditions with different
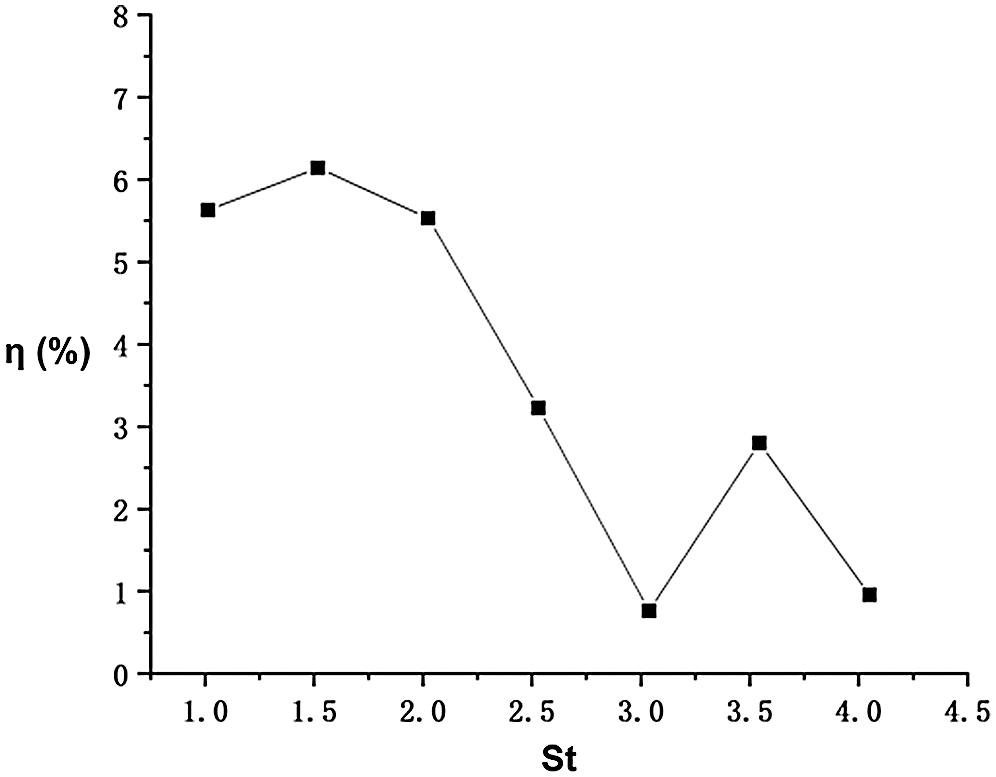
Figure 17: Propulsive efficiencies of the fish model for conditions with different
To obtain different
In the following, we consider cases with different
Table 6: Parameter selections for six conditions with different
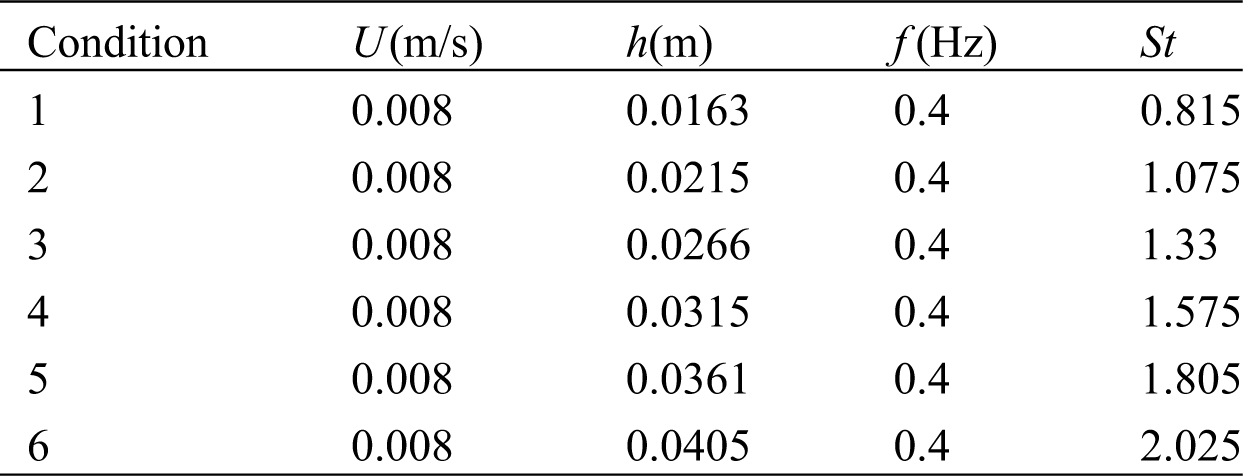
Table 7: Parameter selections for seven conditions with different
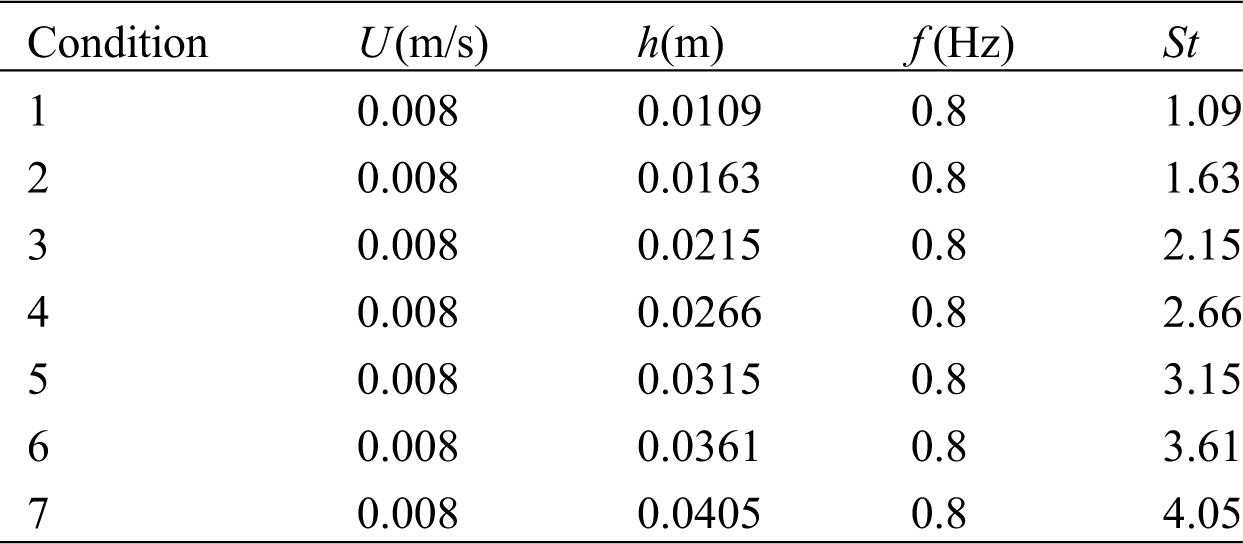
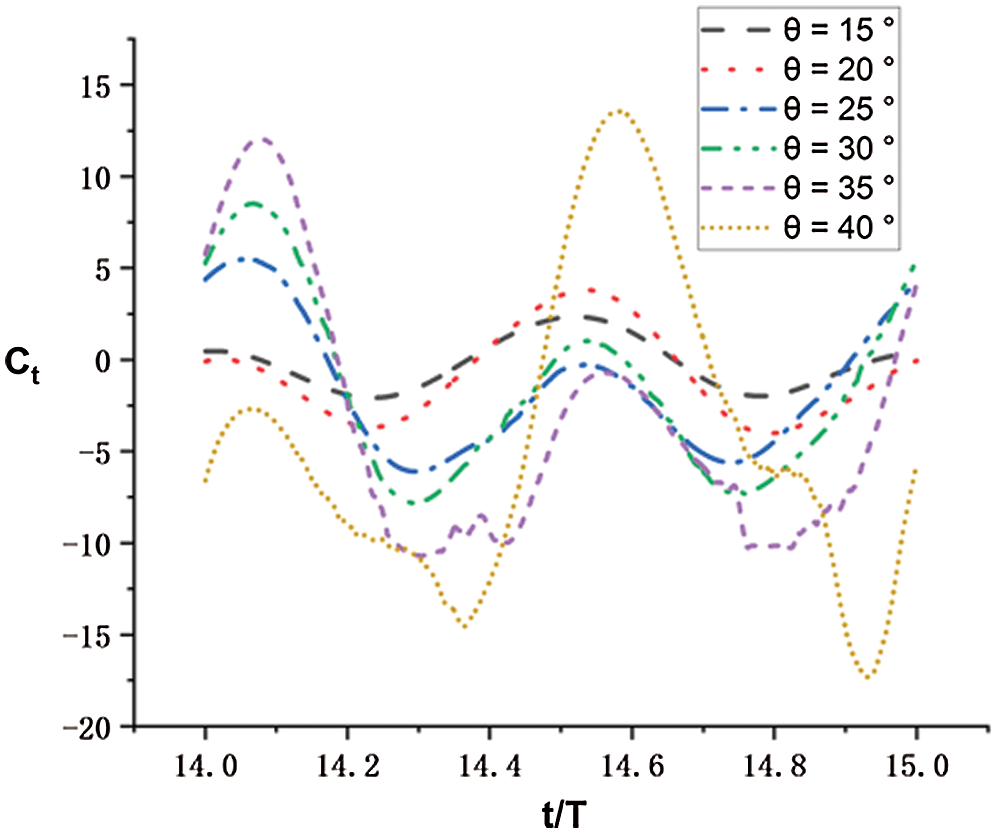
Figure 18: Thrust coefficients in a single period of the fish model for conditions with different
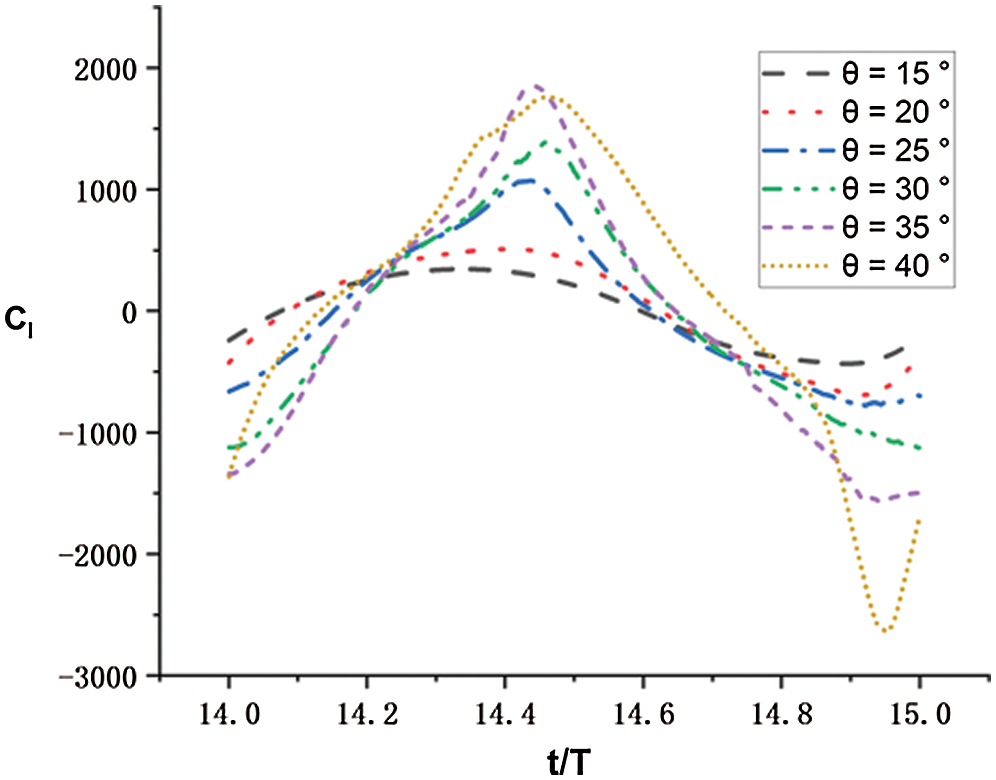
Figure 19: Lift coefficients in a single period of the fish model for conditions with different
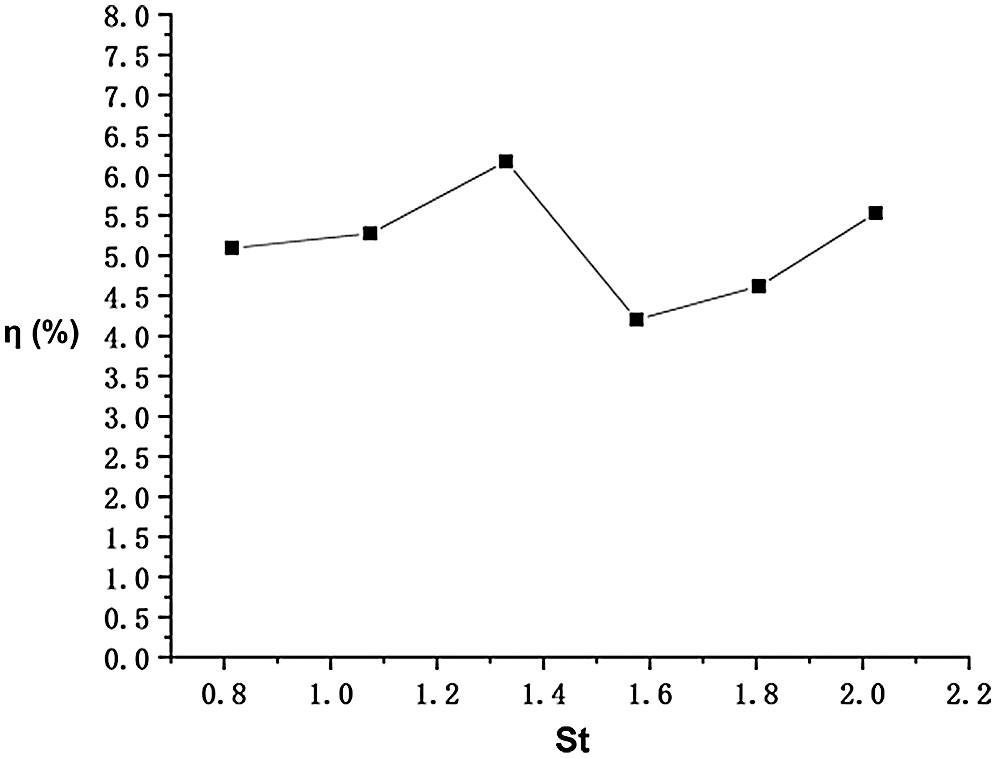
Figure 20: Propulsive efficiencies of the fish model for conditions with different
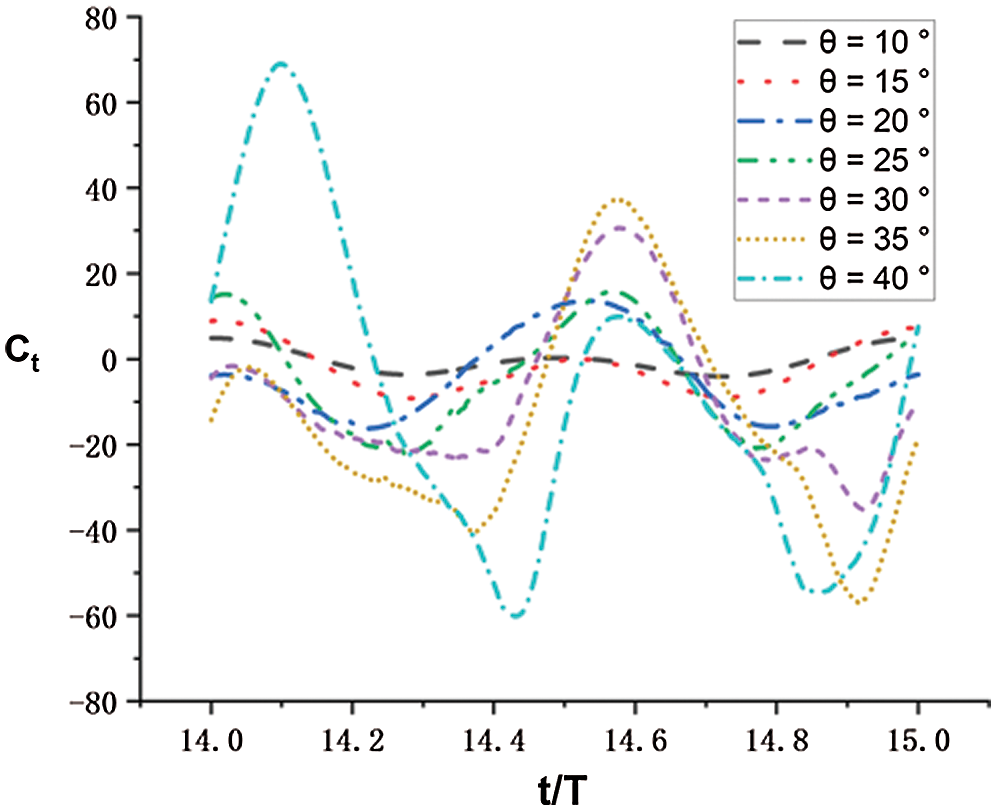
Figure 21: Thrust coefficients in a single period of the fish model for conditions with different
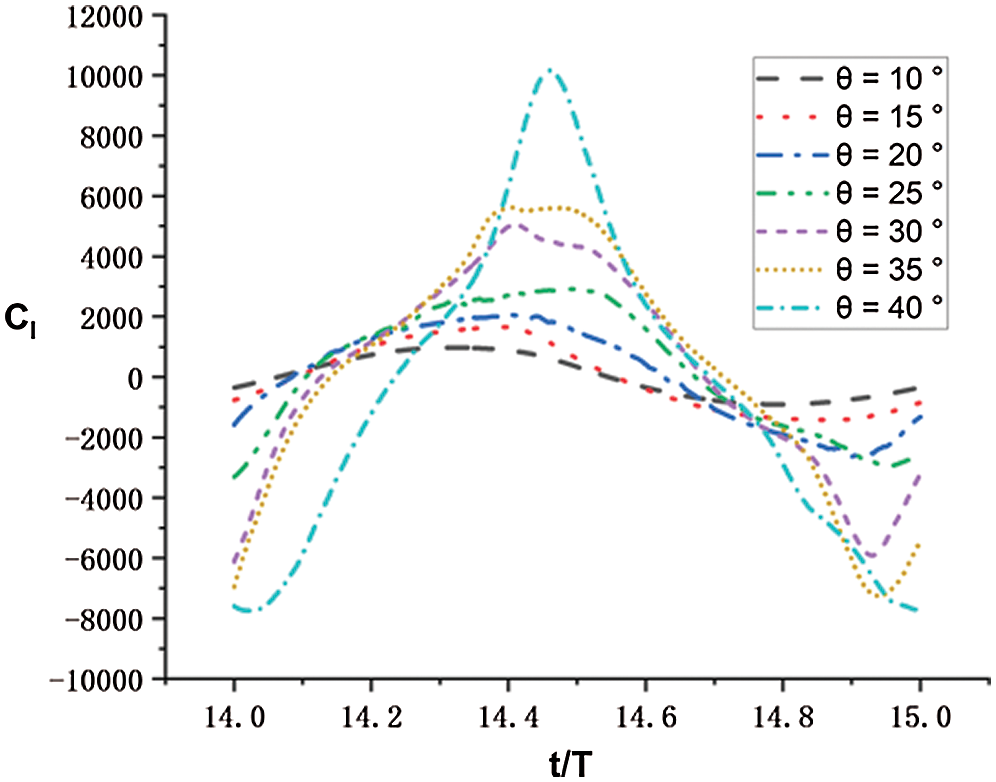
Figure 22: Lift coefficients in a single period of the fish model for conditions with different
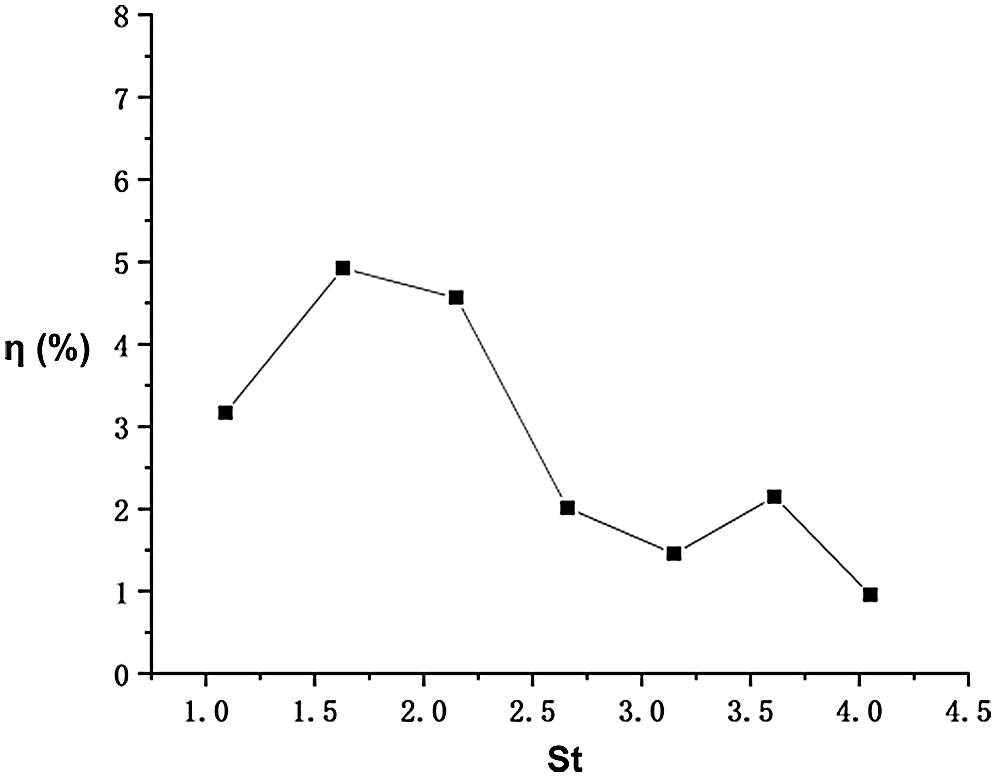
Figure 23: Propulsive efficiencies of the fish model for conditions with different
Above results are obtained by changing the heave amplitude of the caudal fin. We can find that if the heave amplitude increases, the
In the present study, a single joint fish model was employed to explore the fish swimming performance. Using a simple fish model for numerical simulation, the mechanism of fish body swimming is explored. By analyzing the pressure contour and vorticity contour of the flow of fish swimming, it is concluded that caudal fin swing generates anti-Kármán vortex to push fish body to swim forward. In order to study how the fish swimming is affected by the
In this paper, with a two-dimensional biomimetic model to represent the cross-section of a fish, the flow field characteristics and the influence of non-dimensional parameters are studied. However, this paper is limited to computing resources, it has not been explored further with a three-dimensional model. In the future, the deficiencies in this area are expected to be solved and the fish propulsion mechanism will be improved in other aspects.
Funding Statement: This research was funded by the National Natural Science Foundation of China, Grant Nos. 51906224 and 51976200.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Tong, B. G., Zhuang, L. X., Cheng, J. Y. (1993). The hydrodynamic analysis of fish propulsion performance and its morphological adaptation. Sadhana, 18(3–4), 719–728. DOI 10.1007/BF02744375. [Google Scholar] [CrossRef]
2. Scaradozzi, D., Palmieri, G., Costa, D., Pinelli, A. (2017). BCF swimming locomotion for autonomous underwater robots: A review and a novel solution to improve control and efficiency. Ocean Engineering, 130, 437–453. DOI 10.1016/j.oceaneng.2016.11.055. [Google Scholar] [CrossRef]
3. Roper, D. T., Sharma, S., Sutton, R., Culverhouse, P. (2011). A review of developments towards biologically inspired propulsion systems for autonomous underwater vehicles. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 225(2), 77–96. DOI 10.1177/1475090210397438. [Google Scholar] [CrossRef]
4. Ren, J., Xu, D., Xu, J. (2020). RANS simulation for the maneuvering and control of a suboff submarine model. Fluid Dynamics & Materials Processing, 16(3), 561–572. DOI 10.32604/fdmp.2020.09791. [Google Scholar] [CrossRef]
5. Zhong, Y., Li, Z., Du, R. (2018). Robot fish with two-DOF pectoral fins and a wire-driven caudal fin. Advanced Robotics, 32(1), 25–36. DOI 10.1080/01691864.2017.1392344. [Google Scholar] [CrossRef]
6. Breder, C. M. (1926). The locomotion of fishes. New York Zoological Society, USA. [Google Scholar]
7. Sfakiotakis, M., Lane, D. M., Davies, J. B. C. (1999). Review of fish swimming modes for aquatic locomotion. IEEE Journal of Oceanic Engineering, 24(2), 237–252. DOI 10.1109/48.757275. [Google Scholar] [CrossRef]
8. Apalkov, A., Fernández, R., Fontaine, J. G., Akinfiev, T., Armada, M. (2012). Mechanical actuator for biomimetic propulsion and the effect of the caudal fin elasticity on the swimming performance. Sensors and Actuators A: Physical, 178(4), 164–174. DOI 10.1016/j.sna.2012.01.022. [Google Scholar] [CrossRef]
9. Bergmann, M., Iollo, A., Mittal, R. (2014). Effect of caudal fin flexibility on the propulsive efficiency of a fish-like swimmer. Bioinspiration & Biomimetics, 9(4), 046001. DOI 10.1088/1748-3182/9/4/046001. [Google Scholar] [CrossRef]
10. Krishnadas, A., Ravichandran, S., Rajagopal, P. (2018). Analysis of biomimetic caudal fin shapes for optimal propulsive efficiency. Ocean Engineering, 153, 132–142. DOI 10.1016/j.oceaneng.2018.01.082. [Google Scholar] [CrossRef]
11. Larouche, O., Zelditch, M. L., Cloutier, R. (2017). Fin modules: an evolutionary perspective on appendage disparity in basal vertebrates. BMC Biology, 15(1), 20133120. DOI 10.1186/s12915-017-0370-x. [Google Scholar] [CrossRef]
12. Walker, J. A., Alfaro, M. E., Noble, M. M., Fulton, C. J. (2013). Body fineness ratio as a predictor of maximum prolonged-swimming speed in coral reef fishes. PLoS One, 8(10), e75422. DOI 10.1371/journal.pone.0075422. [Google Scholar] [CrossRef]
13. Zhao, Z., Dou, L. (2019). Effects of the structural relationships between the fish body and caudal fin on the propulsive performance of fish. Ocean Engineering, 186, 106117. DOI 10.1016/j.oceaneng.2019.106117. [Google Scholar] [CrossRef]
14. Li, R., Xiao, Q., Liu, Y., Hu, J., Li, L. et al. (2018). A multi-body dynamics based numerical modelling tool for solving aquatic biomimetic problems. Bioinspiration & Biomimetics, 13(5), 056001. DOI 10.1088/1748-3190/aacd60. [Google Scholar] [CrossRef]
15. Redchyts, D. O., Shkvar, E. A., Moiseienko, S. V. (2020). Computational Simulation of turbulent flow around tractor-trailers. Fluid Dynamics & Materials Processing, 16(1), 91–103. DOI 10.32604/fdmp.2020.07933. [Google Scholar] [CrossRef]
16. Cheng, H., Du, G., Zhang, M., Wang, K., Bai, W. (2020). Determination of the circulation for a large-scale wind turbine blade using computational fluid dynamics. Fluid Dynamics & Materials Processing, 16(4), 685–698. DOI 10.32604/fdmp.2020.09673. [Google Scholar] [CrossRef]
17. Maddock, L. (2008). The mechanics and physiology of animal swimming. UK: Cambridge University Press. [Google Scholar]
18. Webb, P. W. (1984). Form and function in fish swimming. Scientific American, 251(1), 72–82. DOI 10.1038/scientificamerican0784-72. [Google Scholar] [CrossRef]
19. Lauder, G. V. (2015). Fish locomotion: Recent advances and new directions. Annual Review of Marine Science, 7(1), 521–545. DOI 10.1146/annurev-marine-010814-015614. [Google Scholar] [CrossRef]
20. Liu, H., Kolomenskiy, D., Nakata, T., Li, G. (2017). Unsteady biofluid dynamics in flying and swimming. Acta Mechanica Sinica, 33(4), 663–684. DOI 10.1007/s10409-017-0677-4. [Google Scholar] [CrossRef]
21. Zhao, Y., Usami, T., Abe, S., Takada, Y. (2015). Effect of phase difference on reverse karman vortex street in two-joint small robotic fish. The Proceeding of JSME Annual Conference on Robotics and Mechatronics (Robomec). [Google Scholar]
22. Liang, J., Wang, T., Wen, L. (2011). Development of a two-joint robotic fish for real-world exploration. Journal of Field Robotics, 28(1), 70–79. DOI 10.1002/rob.20363. [Google Scholar] [CrossRef]
23. Karbasian, H. R., Esfahani, J. A. (2017). Enhancement of propulsive performance of flapping foil by fish-like motion pattern. Computers & Fluids, 156, 305–316. DOI 10.1016/j.compfluid.2017.07.016. [Google Scholar] [CrossRef]
24. Xiao, Q., Liao, W. (2010). Numerical investigation of angle of attack profile on propulsion performance of an oscillating foil. Computers & Fluids, 39(8), 1366–1380. DOI 10.1016/j.compfluid.2010.04.006. [Google Scholar] [CrossRef]
25. Hu, J., Xiao, Q. (2014). Three-dimensional effects on the translational locomotion of a passive heaving wing. Journal of Fluids and Structures, 46(32), 77–88. DOI 10.1016/j.jfluidstructs.2013.12.012. [Google Scholar] [CrossRef]
26. Alben, S., Shelley, M. (2005). Coherent locomotion as an attracting state for a free flapping body. Proceedings of the National Academy of Sciences of the United States of America, 102(32), 11163–11166. DOI 10.1073/pnas.0505064102. [Google Scholar] [CrossRef]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |