Materials Processing
| Fluid Dynamics & Materials Processing |
DOI: 10.32604/fdmp.2021.012741
ARTICLE
A Combined Numerical-Experimental Study on the Noise Power Spectrum Produced by an Electromagnetic Sensor for Slurry Flow
1College of Agricultural Equipment Engineering, Henan University of Science and Technology, Luoyang, 471023, China
2School of Medical Instruments, Shanghai University of Medicine and Health Sciences, Shanghai, 201318, China
*Corresponding Author: Song Gao. Email: gaosongsan@163.com
Received: 11 July 2020; Accepted: 07 February 2021
Abstract: The signals generated by electromagnetic flow sensors used for slurry fluids are often affected by noise interference produced by interaction with the slurry itself. In this study, the power spectrum characteristics of the signal are studied, and an attempt is made to determine the relationship between the characteristics of the related noise and the velocity and concentration of the slurry fluid. Dedicated experiments are conducted and the related power spectrum curve is obtained processing the signal measured by the sensor with Matlab. Numerical simulations are also carried out in the frame of an Eulerian approach in order get additional insights into the considered problem through comparison with the experimental results. The following conclusions are drawn: (1) The intensity of noise is directly proportional to the number of solid particles colliding with the electrode of the electromagnetic flow sensor per unit time, and to the square of the average velocity of the flow layer near the pipe wall. (2) With an increase in the slurry noise intensity, the power spectrum curve shifts upward in the logarithmic coordinate system (and vice versa).
Keywords: Electromagnetic flow sensor; slurry noise; power spectrum; kinetic energy theorem
1.1 Overview of Slurry Noise of Electromagnetic Flow Sensor
The advantage of electromagnetic flow sensor is simple structure, large measurement range, high measurement accuracy, good corrosion resistance, low requirement on velocity distribution, reliable use, convenient maintenance, long life, etc. Therefore, for slurry fluid with difficult flow measurement, electromagnetic flow sensor is the most widely used flow meter [1], such as iron ore pipeline transportation flow measurement [2–5], coal water slurry and pulp flow measurement [6–10], deep-sea mining slurry transportation [11] and so on. However, when using electromagnetic flow sensor to measure slurry fluid, there is a problem that the measurement signal is interfered by slurry noise, which leads to errors in the measurement results. Therefore, the purpose of this paper is to study the characteristics of slurry noise and provide some theoretical basis of solving the problem of slurry noise.
The output signal of the electromagnetic flow sensor used for measuring slurry fluid will frequently jump, which is shown as a random large jump signal. This phenomenon is called slurry noise [12–15]. The typical waveform of flow velocity signal measured by electromagnetic flow sensor for water and slurry is shown in Fig. 1.
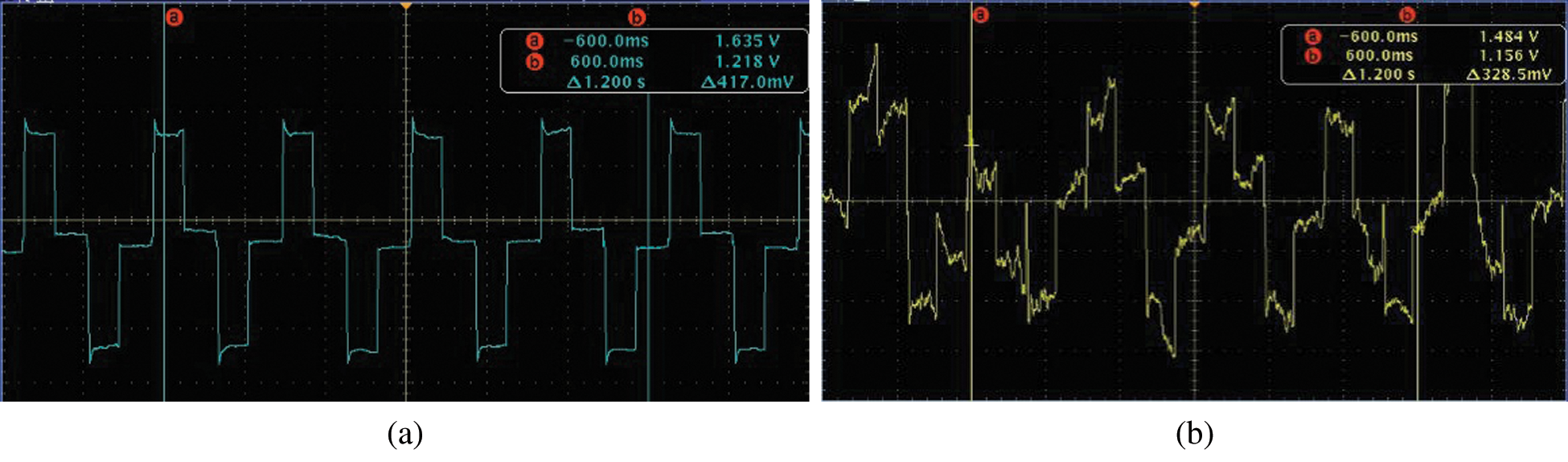
Figure 1: The flow rate induced potential signal waveform of the electromagnetic flow sensor. (a) Measurement waveform of the water; (b) Measurement waveform of the slurry
Fig. 1 shows the flow rate induced potential signal of electromagnetic flow sensor displayed by oscilloscope. The fluid measured by the electromagnetic flow sensor is water and slurry fluid, with the average flow velocity of
1.2 Research Status of Slurry Noise
Studying the characteristics of slurry noise and taking measures to reduce or eliminate the influence of slurry noise on measurement is currently hot topics in the research field of electromagnetic flow sensors, relevant scholars and technical workers have done a lot of research on the slurry noise problem of electromagnetic flow sensors and the solutions to the slurry noise.
The research of literatures [6,22–29] shows that slurry noise is a kind of random signal and has the property that the power spectral density is inversely proportional to the frequency, which is approximately 1/f. These studies believe that the power spectrum of the slurry noise has 1/f characteristic, and the slurry noise belongs to 1/f noise. Literatures [22–28,30,31] adopts various digital signal processing methods to solve the interference of slurry noise of electromagnetic flow sensor on measurement signals, and has achieved good results. These studies mainly reveal the 1/f characteristic of slurry noise power spectrum, and according to the 1/f characteristic of slurry noise, the influence of slurry noise on the output signal of electromagnetic flowmeter is solved by increasing excitation frequency. In essence, these methods all use signal processing to solve the slurry noise problem. However, this method has limitations, because the excitation frequency can not be increased without restriction, and too high excitation frequency will lead to poor stability of zero point of electromagnetic flow sensor.
If the sensor structure is optimized according to the flow field characteristics of slurry fluid, so as to reduce the number of collisions between solid particles of slurry fluid and electrodes per unit time, the problem of slurry noise can be well solved. According to the above ideas, we try to study the influence of slurry velocity and concentration distribution on slurry noise, which provides a theoretical basis for optimizing the sensor structure.
1.3 Characteristics and Research Status of 1/f Noise
Slurry noise belongs to random noise, and its power spectrum has 1/f characteristic, so the power spectrum model of slurry noise can be established by establishing 1/f noise model. At present, there are many achievements in the study of 1/f noise characteristics and simulation methods. Keshner [32] proposed that the random fluctuation phenomenon with the inverse ratio of power spectral density to frequency is called 1/f noise, and 1/f noise is a random process. Broadly speaking, if the power spectral density has a random fluctuation property that decreases with increasing frequency and increases with decreasing frequency, it can be called 1/f noise. van der Ziel et al. [33,34] classifies 1/f noise into basic and non-basic 1/f noise. Wornell et al. [35–37] gives a quasi-1/f signal generation theorem and a method to generate 1/f signals in a certain frequency range. Literatures [38,39] points out that 1/f noise belongs to pink noise in colored noise, and studies the method of simulating 1/f noise by computer, but the method of generating 1/f noise in these methods is too complex and requires a large amount of calculation. With the wide application in engineering field, using software to simulate physical phenomena has become an efficient research and experimental means. At present, using Matlab software to simulate 1/f noise is a more convenient method. The specific process is: design a digital filter, then use white noise as the input signal, and get 1/f noise through the filter. The DSP (Digital Signal Processor) toolbox of Matlab provides a digital filter for generating 1/f noise. Only by modifying the parameters of the filter, the required 1/f noise signals with different power spectral densities can be conveniently obtained, and unwanted signal components can be filtered by windowing.
Because the random signal can not be described by a mathematical formula, the characteristics of slurry noise signal can only be studied by analyzing the power spectrum. Its characteristics can only be studied by analyzing the power spectrum of the random signal. In the paper, the power spectrum of slurry noise is simulated by Matlab, and influence of slurry velocity and concentration on power spectrum of slurry noise is analyzed, which provides a certain theoretical basis of the research and development of electromagnetic flow sensor for slurry flows measurement. Based on the 1/f characteristic of the power spectrum of slurry noise, we directly call the 1/f noise program with the DSP toolbox of Matlab, and through modifying the parameters, the generated 1/f noise power spectrum graph is close to the real slurry noise power spectrum graph.
2 Simulation of Slurry Noise Power Spectrum
2.1 Simulation Principle of Slurry Noise Power Spectrum
Assuming that the solid particles impacting the electrode within a certain time
On the basis of the 1/f characteristic of the power spectrum of slurry noise, power spectrum
or
In this way, IIR digital filter
2.2 Simulation Implementation of Slurry Noise Power Spectrum of Electromagnetic Flow Sensor
The measurement pipeline and two-dimensional cross-section model of electromagnetic flow sensor are shown in Fig. 2.
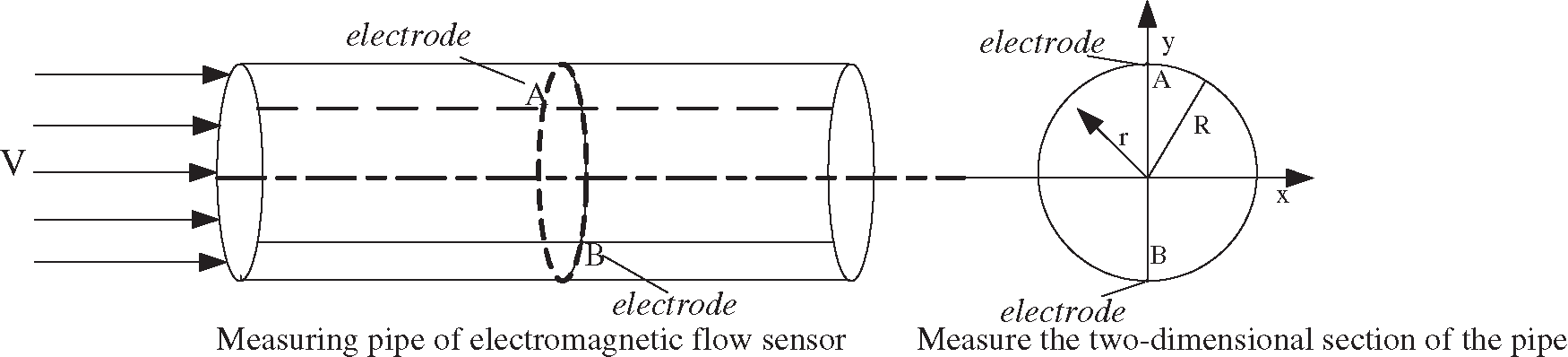
Figure 2: Schematic diagram of electromagnetic flow sensor measuring pipe and two-dimensional section
As shown in Fig. 2, the radius of two-dimensional section of the pipe measured by the electromagnetic flow sensor is
The installation structure of the electrode of the electromagnetic flow sensor is shown in Fig. 3.

Figure 3: Installation structure of electromagnetic flowmeter measuring electrode. 1-Nut; 2-Washer; 3-Wiring block; 4-Insulation lining; 5-Electrode; 6-Metal conductor; 7-Spring washer; 8-Insulation sleeve
Divide the pipe in accordance with the radial position
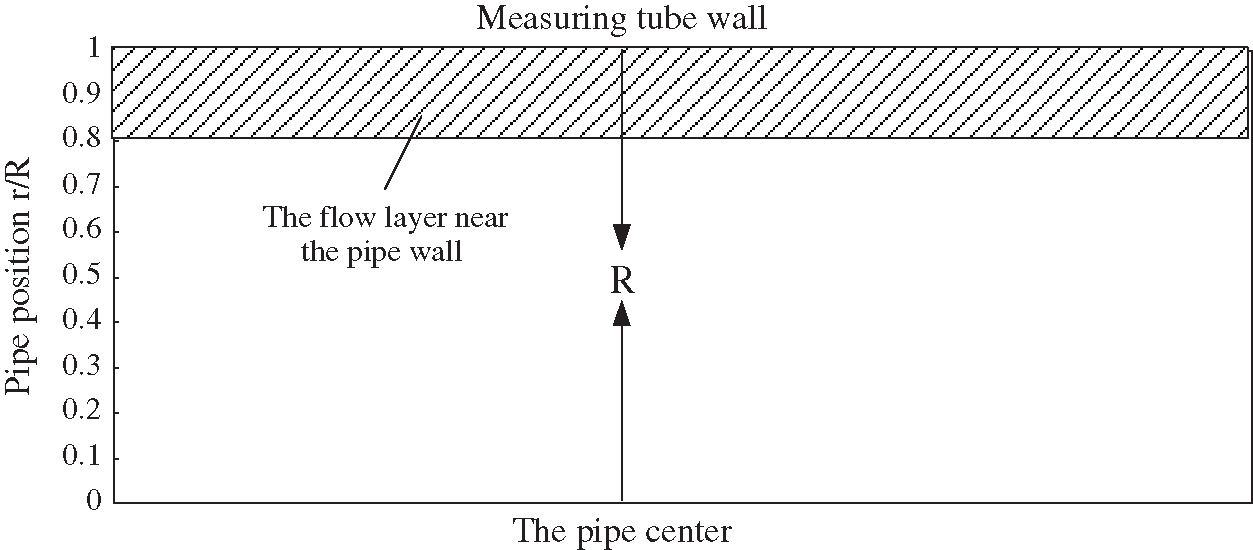
Figure 4: Radial diagram of electromagnetic flow sensor measuring pipe
In the Fig. 4, the distance between any point in the pipe and the center of the pipe is
If the average fluid velocity is
After the white noise sequence
In Fig. 5, the range of abscissa is
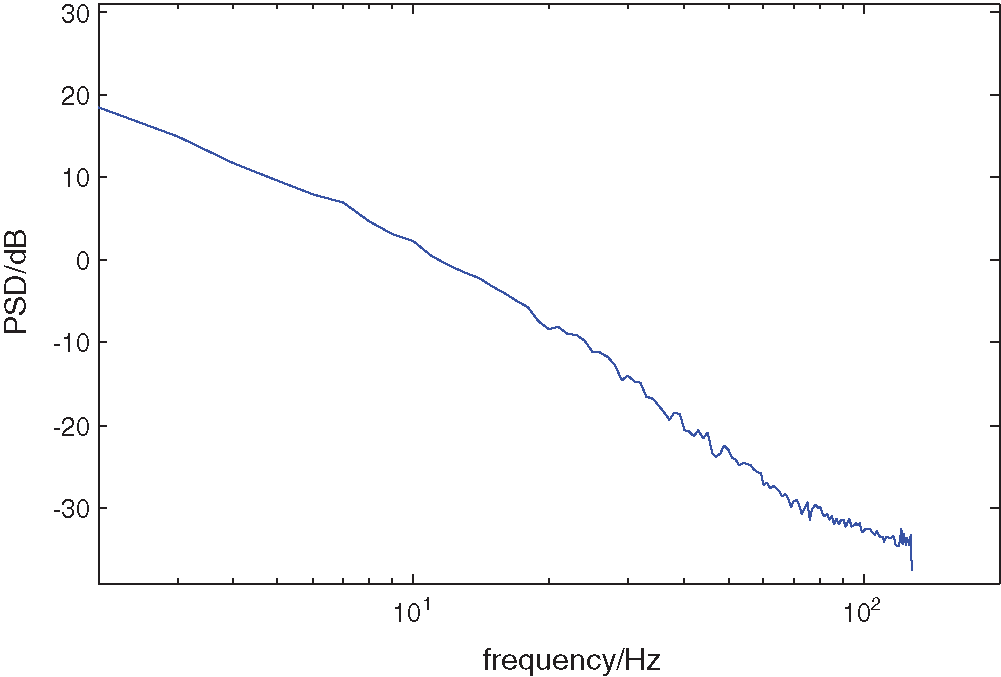
Figure 5: Power spectral density curve of 1/f noise generated by simulation
Because the slurry noise power spectrum of electromagnetic flow sensor has 1/f characteristic, in this paper, this method is used to generate 1/f noise power spectrum to simulate slurry noise of electromagnetic flow sensor.
3 Experimental Verification and Characteristic Analysis of Slurry Noise Power Spectrum of Electromagnetic Flow Sensor
The diameter is 40
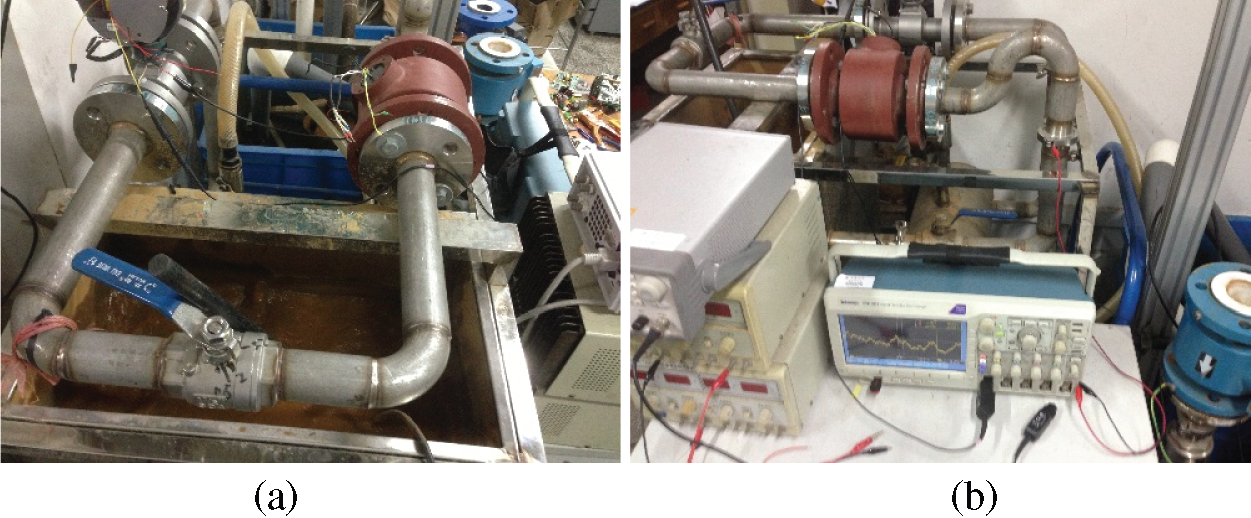
Figure 6: The slurry noise experiment of slurry fluid measured by electromagnetic flowmeter. (a) The slurry fluid experiment; (b) The oscilloscope displays the time domain waveform of slurry noise
In order to observe the time domain waveform of slurry noise on the oscilloscope and collect the slurry noise data, the excitation signal of the electromagnetic flowmeter is switched off during the experiment. It is found in experimenting the frequency range of noise is about
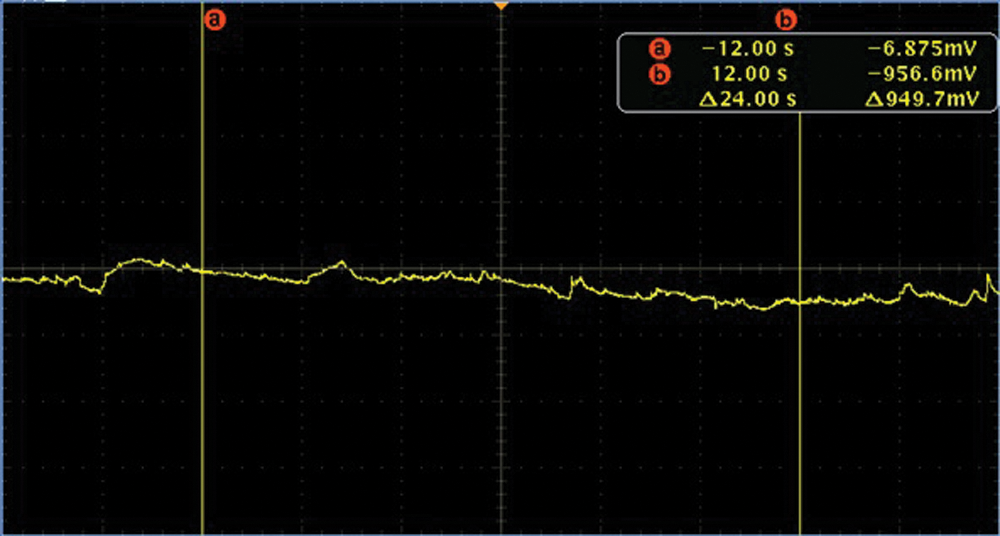
Figure 7: The slurry noise time domain diagram of average flow velocity
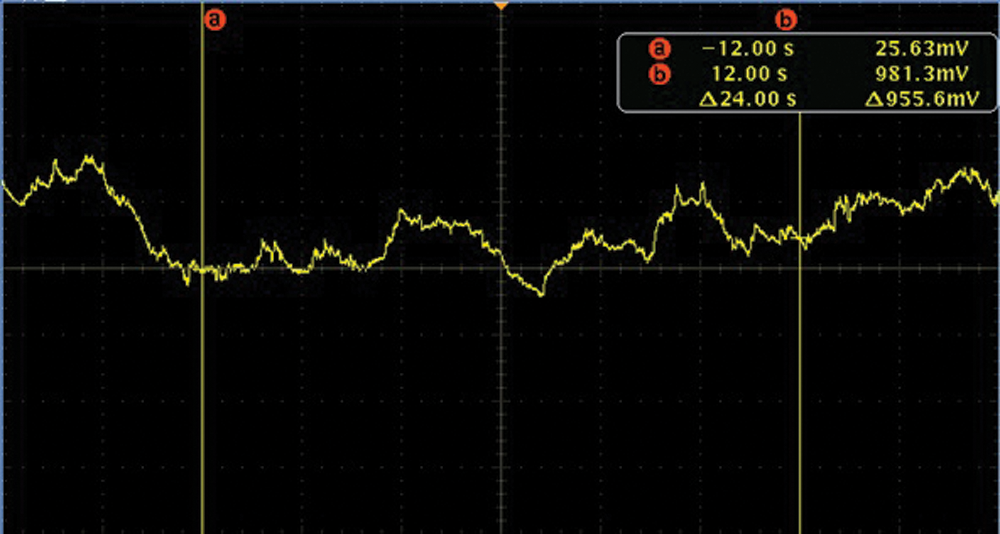
Figure 8: The slurry noise time domain diagram of average flow velocity
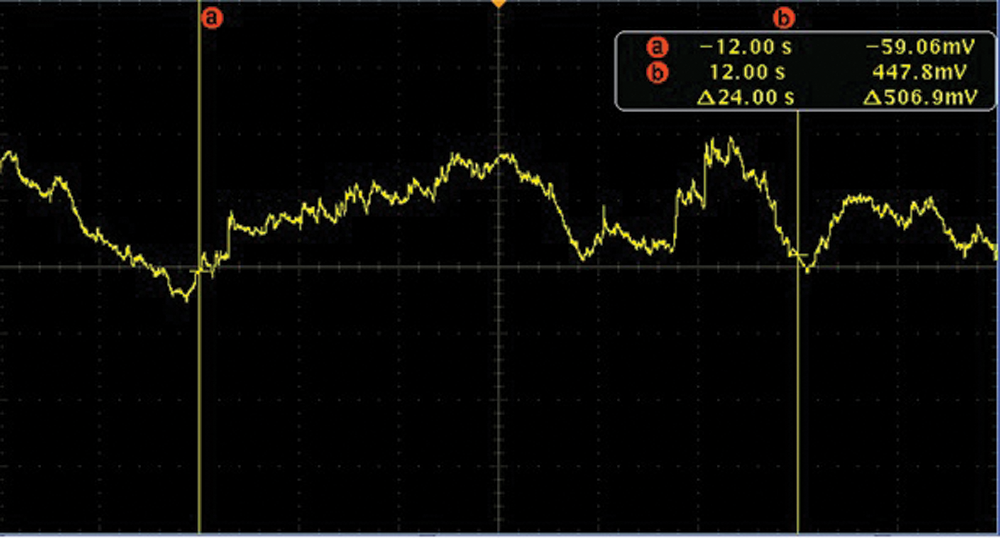
Figure 9: The slurry noise time domain diagram of average flow velocity
As can be seen from Figs. 7–9, in time domain, the fluctuation amplitude of noise increases with increase of flow velocity, which is caused because of the increasing fluid velocity, the amount of solid phase particles colliding with the electrode of sensor increases in unit time. According to the principle of noise generation, the strength of noise is directly proportional to the total kinetic energy
According to the kinetic energy theorem:
In formula (4),
In the situation of the slurry fluid with the initial average volume concentration of 3% in the solid phase is measured when the initial average velocity is
Only consider the two-dimensional situation, average velocity of slurry fluid in the flow layer where the measuring electrode exists is
According to formula (5), if
At present, many scholars use CFD method to study the fluid flow problem, and put forward some new algorithms [40,41]. These documents show that the CFD method is an efficient and reliable method to study slurry flow. Therefore, in the work of this paper, CFD method is used to calculate the above slurry flow parameters.
When the initial average flow velocity is
References [19,20] suggest that Euler-Euler multiphase flow model can be used to simulate and calculate the general problems of multiphase flow. Therefore, in this paper, aiming at the study of sand slurry fluid, Euler-Euler multiphase flow model is used to establish the two-phase flow mechanics model, and RNG turbulence equation [21] is used to describe the turbulent flow of sand slurry fluid.
To establish a mathematical model of sand slurry fluid flow, the following conditions are required:
1. The solid phase is a continuous fluid, the liquid phase is an incompressible fluid, and the physical properties of each phase are constant.
2. There is no phase change in both solid and liquid phases, and cavitation phenomenon in the field is not considered.
The equation of motion of slurry fluid is established in Euler coordinate system as follows:
where
Eq. (9) is a liquid phase continuous equation and Eq. (10) is a solid phase continuous equation, the momentum equations are:
where
then,
where
The standard
a) RNG model adds the additional viscosity term to the N-S equation, and its calculation accuracy is relatively higher.
b) The standard
These characteristics make RNG
Using RNG method [44,45] to solve N-S equation and introducing the turbulence kinetic energy
In Eqs. (16) and (17),
where
In this paper, the boundary conditions are set as the average velocity inlet and free outflow outlet, the pipe wall is automatically generated by wall function, the pressure is atmospheric pressure, and there is no viscous stress.
In this paper, we use CFD module of Comsol Multiphysics to carry out the numerical calculation, the calculation method is the finite element method (FEM) [46–49], the calculation is set to the steady state calculation, and the numerical scheme is automatically set by software. The advantage of steady state calculation is that it doesn’t need to obtain the transient value of the flow field, and the steady state results can be used directly, which is helpful to reduce the requirement of computing resources [50]. The work in this paper studies the flow velocity and concentration distribution when the fluid reaches steady state, so the steady state model is suitable.
In order to make sure the grid independence of calculation results, grid testing is necessary. The numerical analysis area is divided into grids, and the number of grids in the calculation area is 17670, 27776, 48588, 73802, 121002, 303530 and 811456, respectively. Under these seven conditions, the velocity and concentration distribution of slurry fluid with initial average velocity
Table 1: Comparison of the maximum flow velocity and volume concentration for different grid numbers (

Table 2: Comparison of the maximum flow velocity and volume concentration for different grid numbers (

Table 3: Comparison of the maximum flow velocity and volume concentration for different grid numbers (

Tabs. 1–3 shows the sensitivity of grids to calculation results, and shows that the number of 303,530 grids is enough to make the solution independent of the number of grids. Therefore, in this paper, the number of calculation area division grids is 303530.
According to CFD method, when the initial average velocity
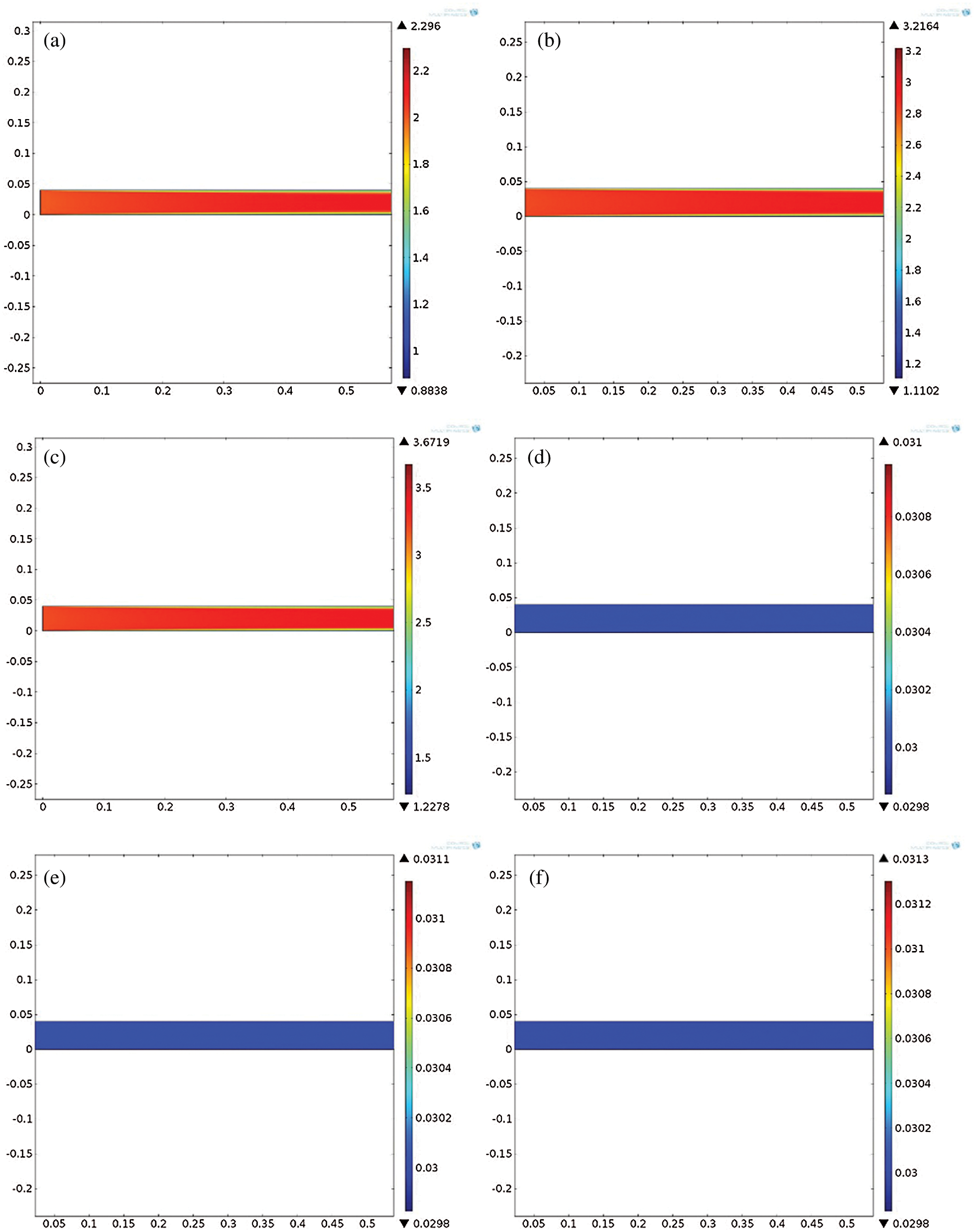
Figure 10: Cloud image of flow field distribution and concentration distribution. (a) Flow velocity distribution (
And the values of
According to CFD method, it can be calculated that, when the initial average flow velocity is
Formula (22) shows that, with the change in flow velocity, the solid phase volume concentration in the flow layer area near the pipe wall remains unchanged.
At the three initial average flow velocity of
according to formula (23) and formula (24), the amount of solid phase particles colliding with electrode increases by 1.35 times and 1.54 times respectively, after the average velocity of slurry fluid with a solid volume concentration of 3% increase from
The total kinetic energy of solid phase particles colliding with electrode in unit time is
Formula (25) and formula (26) show that, after the initial average velocity of the slurry fluid with a solid volume concentration of 3% increases from
3.4 Analysis on Power Spectrum Characteristics of Slurry Noise
In Fig. 11, the x-coordinate ranges from 2
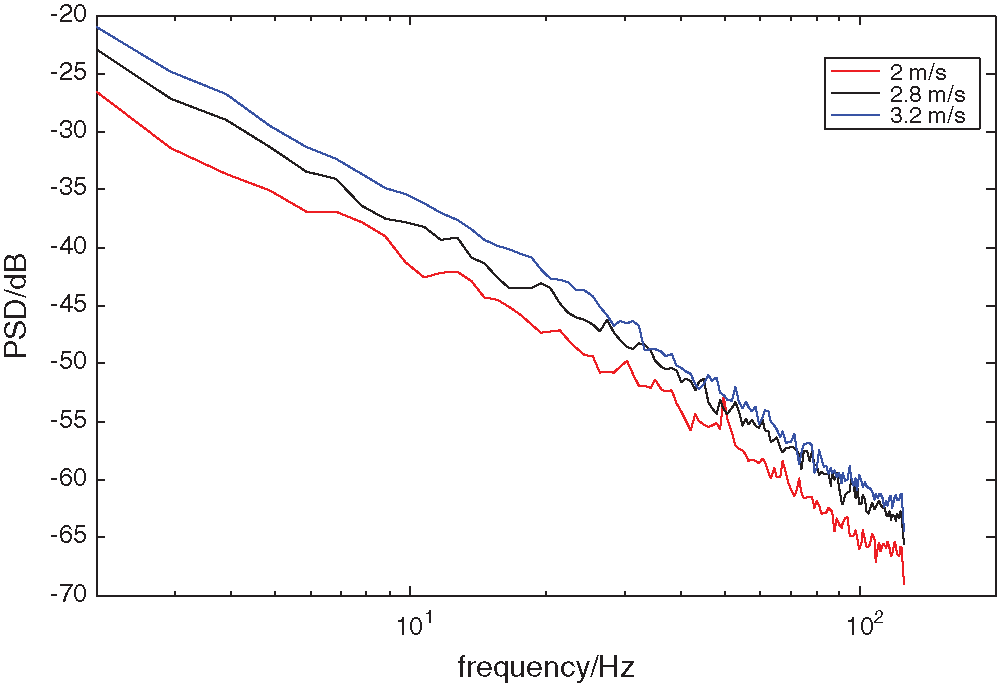
Figure 11: The power spectral of slurry noise
With the increase of average flow velocity, the 1/f characteristic of the power spectral curve of noise remains unchanged, which is manifested as an overall upward shift. Under the condition of average flow velocity is
According to formula (27) and formula (28), formula (29) and formula (30) can be obtained:
Formula (29) and formula (30) show that the slurry noise intensity increases by 2.51 times and 3.98 times respectively when the average velocity of slurry fluid with a solid phase volume concentration of 3% increases from
If the solid phase concentration or average velocity of slurry fluid changes, the number
It can be seen from Fig. 11, the slurry fluid with the solid volume concentration of 3% is measured by the electromagnetic flow sensor with the diameter of 40
It can be seen from formula (31), formula (32) and formula (33), after
According to formula (34):
So the variance
As
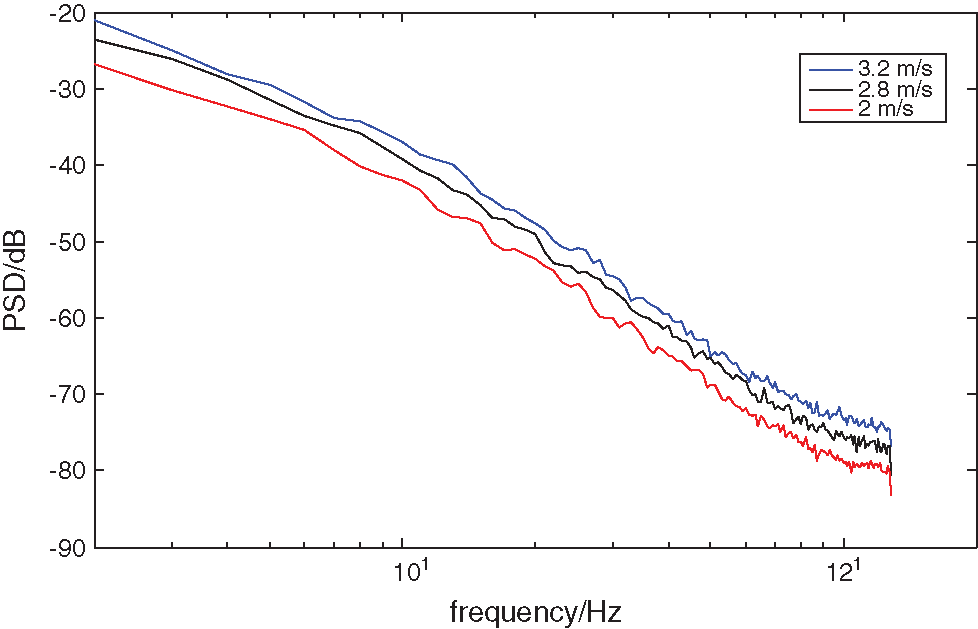
Figure 12: The power spectrum of slurry noise obtained by simulation
It can be seen from Fig. 12, according to formula (35), formula (36) and formula (37), after
1. With the change of average flow velocity, the amount of solid phase particles colliding with electrode changes from unit time, the variance of the corresponding white noise sequence changes, and the position of power spectral curve of simulated slurry noise also changes in coordinate system.
2. If the amount of solid phase particles colliding with electrode increases in unit time, the variance of the corresponding white noise sequence increases, and the power spectrum curve of the slurry noise shifts upward. If the number of solid phase particles colliding with electrode decreases in unit time, the variance of the corresponding white noise sequence decreases, and the power spectrum curve of slurry noise shifts downward.
3. The power spectrum curve of slurry noise reflects the intensity of slurry noise, the upward translation of the curve indicates that the intensity of slurry noise increases, the downward translation of the curve indicates that the intensity of slurry noise decreases.
In this paper, firstly, on the basis of the 1/f characteristic of the power spectrum of slurry noise, based on Matlab software, the slurry noise is simulated by using the 1/f noise filter passed by Gaussian white noise. Then, the relationship between intensity of slurry noise and the amount of solid phase particles impacting the electrode of electromagnetic flow sensor in unit time and the average flow velocity of the flow layer near the pipe wall is analyzed through slurry experiments, and the simulation of slurry noise is verified. Finally, according to the slurry noise power spectrum curves under different flow velocities obtained from the slurry fluid experiments and simulations, the variation law of the slurry noise power spectrum curve with the flow velocity is obtained, and the conclusions are as follows:
1. On the basis of the cause of slurry noise and 1/f characteristic of power spectrum, slurry noise power spectrum can be generated by Matlab simulation, and the real slurry noise power spectrum can be simulated as long as the variance of Gaussian white noise is adjusted as required.
2. The intensity of slurry noise is directly proportional to the amount of solid phase particles impacting electrode in unit time and square of the average velocity of flow layer near the pipe wall.
3. With the change of average flow velocity of measured fluid, the position of power spectral curve of slurry noise changes in coordinate system. Specifically, if the average velocity increases, the power spectral curve of slurry noise will shift upward, and if the average velocity decreases, the power spectral curve will shift downward.
The above conclusions can improve the related theory of electromagnetic flow sensor in slurry measurement field to a certain extent, and provide a certain theoretical basis of the research and development of electromagnetic flow sensors for slurry fluid flow measurement.
The deficiency of this paper is that due to the limitation of experimental conditions, there is still a lack of using mechanical models to prove the conclusion and give physical insight. Therefore, the work of this paper is worthy of further study in verifying the conclusion by using the mechanical model. In addition, in the future research, we will consider using CFD method to verify the experimental results in this paper.
Funding Statement: This work was sponsored by National Key Research and Development Program of China Subproject (No. 2016YFD0700103), Natural Science Foundation of Henan (Nos. 202300410124 & 19HASTIT021), Key Research and Development Program of Yunnan Province (No. 2018ZC001) and the National Natural Science foundation of China under Grant No. 61801288.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. King, R. P. (2003). Introduction to practical fluid flow. New York, US: Butterworth-Heinemann, Ltd. [Google Scholar]
2. Yang, J. Z., Wang, X. D., Wu, J. D. (2017). The prediction of critical deposition velocity in slurry pipeline based on improved SFLA-LSSVM. Journal of Yunnan University, 39(1), 25–32. [Google Scholar]
3. Xiao, K., Xiong, X., Wu, J. D. (2016). Detection and research of iron ore pipeline flow in curved pipe. Computer & Digital Engineering, 44(6), 1002–1005. [Google Scholar]
4. Yang, J. Z., Wang, X. D., Wu, J. D., Leng, T. T. (2016). The prediction of critical deposition velocity in slurry pipeline based on improved PSO-LSSVM. Computers and Applied Chemistry, 33(7), 821–826. [Google Scholar]
5. Ma, S., Wang, X. D., Wu, J. D., Fan, Y. G., Huang, G. Y. (2013). Support vector machine based recognition method for pipeline blockage. Journal of Yunnan University, 12(5), 571–575. [Google Scholar]
6. Yang, S. L., Xu, K. J., Liang, L. P., Zhang, R., Wang, G. (2011). Development of DSP based slurry-type electromagnetic flowmeter. Chinese Journal of Scientific Instrument, 32(9), 2101–2107. [Google Scholar]
7. Gao, S., Du, X. W., Yue, J. M. (2019). Study on measurement error of iron ore pipeline transportation flow based on weight function theory of electromagnetic flow sensor. Journal of Supercomputing, 75(5), 2289–2303. DOI 10.1007/s11227-018-2598-9. [Google Scholar] [CrossRef]
8. Tao, F., Zhang, W., Wang, Y. G. (2020). Pulp concentration control system based on differential evolution algorithm under disturbance rejection. Packaging Engineering, 41(13), 185–191. [Google Scholar]
9. Hu, Y. N., Ning, K. W., Zhao, J. W. (2019). Pulp consistency control system based on variable universe fuzzy PID. China Pulp & Paper, 38(1), 44–49. [Google Scholar]
10. Zheng, F., Tang, B. Y. (2019). Pulp concentration control system based on improved quantum particle swarm optimization algorithm. Packaging Engineering, 40(5), 196–201. [Google Scholar]
11. Zeng, Y. C., Chen, Q., Xie, Q. M., Li, F. (2013). Analysis of the effect of particle diameter on solid-liquid two-phase flow in a lifting pump of deep sea mining. Journal of Xuzhou Institute of Technology, 28(2), 46–52. [Google Scholar]
12. Shercliff, J. A. (1962). The theory of electromagnetic flow-measurement. Cambridge, UK: Cambridge University Press. [Google Scholar]
13. Li, B., Yan, Y., Chen, J., Fan, X. H. (2020). Study of the ability of an electromagnetic flowmeter based on step excitation to overcome slurry noise. IEEE Access, 8, 126540–126558. DOI 10.1109/ACCESS.2020.3008419. [Google Scholar] [CrossRef]
14. Ge, L., Li, H. L., Huang, Q., Tian, G. Y., Wei, G. H. et al. (2020). Electromagnetic flow detection technology based on correlation theory. IEEE Access, 8, 126540–126558. DOI 10.1109/ACCESS.2020.3008419. [Google Scholar] [CrossRef]
15. Ge, L., Chen, J. X., Tian, G. Y., Zeng, W., Huang, Q. et al. (2020). Study on a new electromagnetic flow measurement technology based on differential correlation detection. Sensors, 20(9), 2489. DOI 10.3390/s20092489. [Google Scholar] [CrossRef]
16. Cai, W. C., Ma, Z. Y., Qu, G. F., Wang, S. L. (2004). Electromagnetic flowmeter. Beijing: China Petrochemical Press. [Google Scholar]
17. Hayat, T., Ijaz Khan, M., Farooq, M., Alsaedi, A., Waqas, M. et al. (2016). Impact of Cattaneo–Christov heat flux model in flow of variable thermal conductivity fluid over a variable thicked surface. International Journal of Heat and Mass Transfer, 99, 702–710. DOI 10.1016/j.ijheatmasstransfer.2016.04.016. [Google Scholar] [CrossRef]
18. Muhammad, I. K., Muhammad, W., Tasawar, H., Ahmed, A. (2017). A comparative study of Casson fluid with homogeneous-heterogeneous reactions. Journal of Colloid and Interface Science, 498, 85–90. DOI 10.1016/j.jcis.2017.03.024. [Google Scholar] [CrossRef]
19. Ookawara, S., Street, D., Ogawa, K. (2006). Numerical study on development of particle concentration profiles in a curved microchannel. Chemical Engineering Science, 61(11), 3714–3724. DOI 10.1016/j.ces.2006.01.016. [Google Scholar] [CrossRef]
20. He, Y. R., Chen, H. S., Ding, Y. L., Lickiss, B. (2007). Solids motion and segregation of binary mixtures in a rotating drum mixer. Chemical Engineering Research and Design, 85(7), 963–973. DOI 10.1205/cherd06216. [Google Scholar] [CrossRef]
21. Yakhot, V., Orszag, S. A. (1986). Renormalization group analysis of turbulence. I. Basic theory. Journal of Scientific Computing, 1(1), 3–51. [Google Scholar]
22. Wada, I. (1990). Electromagnetic flowmeter utilizing magnetic fields of a plurality of frequencies. United States, Patent, S5090250. [Google Scholar]
23. Tomita, T. (1994). Electromagnetic flowmeter and method for electromagnetically measuring flow rate. United States, Patent, US5443552. [Google Scholar]
24. Yang, S. L. (2010). Studies on excitation control and signal processing of slurry-type electromagnetic flowmeter. (Ph.D. Thesis). Hefei University of Technology, China. [Google Scholar]
25. Pang, B., Zhang, Z., Liang, Y. H. (2015). An optimal mixed-signal filtering method for signal conditioning of electromagnetic flowmeter. Electric Machines and Control, 19(1), 102–106. [Google Scholar]
26. Zhang, R., Xu, K. J., Yang, S. L., Liang, L. P., Wang, G. et al. (2012). Digital signal processing system for electromagnetic flowmeter with comb-shaped band-pass filter. Journal of Electronic Measurement and Instrument, 2, 89–95. [Google Scholar]
27. Liang, L. P., Xu, K. J., Wu, X. (2013). Signal separation method for non-stationary slurry flow signal of electromagnetic flow sensor based on stationary Haar wavelet transform. Chinese Journal of Scientific Instrument, 11, 228–235. [Google Scholar]
28. Liang, L. P. (2010). Signal modeling and processing of electromagnetic flowmeter for slurrv-flow measurement. (Ph.D. Thesis). Hefei University of Technology, China. [Google Scholar]
29. Tomita, T. (1997). Electromagnetic Flow-Rate Measurement System. United States. Patent, US6173616B1. [Google Scholar]
30. Michael, L., Simon, O. M., Stefan, J. R., Reinhard, L. (2018). Dynamic offset correction of electromagnetic flow meters. 2018 IEEE International Instrumentation and Measurement Technology Conference, pp. 1–6, Houston, TX. [Google Scholar]
31. Tomita, T. (1985). Electromagnetic flowmeter. United States, Patent, US4658653. [Google Scholar]
32. Keshner, S. M. (1982). 1/f noise. Proceedings of the IEEE, 70(3), 212–218. DOI 10.1109/PROC.1982.12282. [Google Scholar] [CrossRef]
33. van der Ziel, A. (1988). Unified presentation of 1/f noise in electron devices: Fundamental 1/f noise sources. Proceedings of the IEEE, 76(3), 233–258. DOI 10.1109/5.4401. [Google Scholar] [CrossRef]
34. van der Ziel, A. (1970). Noise, Sources, characterization, measurement. Englewood Cliffs, USA: Prentice Hall. [Google Scholar]
35. Wornell, G. W. (1993). Wavelet-based representations for the 1/f family of fractal processes. Proceedings of the IEEE, 81(10), 1428–1450. DOI 10.1109/5.241506. [Google Scholar] [CrossRef]
36. Wornell, G. W. (2002). A Karhunen-Loeve-like expansion for 1/f processes via wavelets. IEEE Transactions on Information Theory, 36(4), 859–861. DOI 10.1109/18.53745. [Google Scholar] [CrossRef]
37. Wornell, G. W., Oppenheim, A. V. (1992). Estimation of fractal signals from noisy measurements using wavelets. IEEE Transactions on Signal Processing, 40(3), 611–623. DOI 10.1109/78.120804. [Google Scholar] [CrossRef]
38. Zhuang, Y. Q., Ma, Z. F., Du, L. (2011). Themystery over 1/f noise. China Academic Journal Electronic Publishing House, 21(4), 69–72. [Google Scholar]
39. Wu, Y. Z., Wu, M. Z. (2008). Simulation and verification of 1/f noise. Ship & Ocean Engineering, 37(6), 38–42. [Google Scholar]
40. Ren, M. M., Shu, X. B. (2020). A novel approach for the numerical simulation of fluid-structure interaction problems in the presence of Debris. Fluid Dynamics & Materials Processing, 16(5), 979–991. DOI 10.32604/fdmp.2020.09563. [Google Scholar] [CrossRef]
41. Bentarzi, F., Mataoui, A. (2018). Turbulent flow produced by twin slot jets impinging a wall. Fluid Dynamics & Materials Processing, 14(2), 107–120. [Google Scholar]
42. Gidaspow, D. (1994). Multiphase flow and fluidization: Continuum and kinetic theory descriptions. New York, US: Academic Press. [Google Scholar]
43. Launder, B. E., Spalding, D. B. (1974). The numerical computation of turbulent flows. Computer Methods in Applied Mechanics and Engineering, 3(2), 269–289. DOI 10.1016/0045-7825(74)90029-2. [Google Scholar] [CrossRef]
44. Cheng, T. S., Yang, W. J. (2008). Numerical simulation of three-dimensional turbulent separated and reattaching flows using a modified turbulence model. Computers & Fluids, 37(3), 194–206. DOI 10.1016/j.compfluid.2007.07.003. [Google Scholar] [CrossRef]
45. Abdul, K. B., Talukdar, S. (2010). Scour and three dimensional turbulent flow fields measured by ADV at a 90° horizontal forced bend in a rectangular channel. Flow Measurement and Instrumentation, 21(3), 312–321. DOI 10.1016/j.flowmeasinst.2010.04.002. [Google Scholar] [CrossRef]
46. Liu, Y., Zhu, R. Q., Cheng, Y., Xie, T., Li, R. Z. (2020). Numerical simulation of hydroelastic responses of floating structure based on CFD-FEM method. Ocean Engineering, 38(6), 24–32. [Google Scholar]
47. Yan, C., Qu, F., Zhao, Y. T., Yu, J., Wu, C. H. et al. (2020). Review of development and challenges for physical modeling and numerical scheme of CFD in aeronautics and astronautices. Acta Aerodynamica Sinica, 38(5), 829–857. [Google Scholar]
48. Wang, Y. (1994). The computation of FEM with strong discontinuity in CFD. Acta Aerodynamica Sinica, 12(1), 22–29. [Google Scholar]
49. Huynh, H. T. (2007). A flux reconstruction approach to high-order schemes including discontinuous Galerkin methods. 18th AIAA Computational Fluid Dynamics Conference, pp. 1–42. Miami, FL. [Google Scholar]
50. Wang, J. D., Tang, H. (2014). Prediction of flow noise in a controlling-valve using CFD method. Noise and Vibration Control, 34(5), 106–109. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |