
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

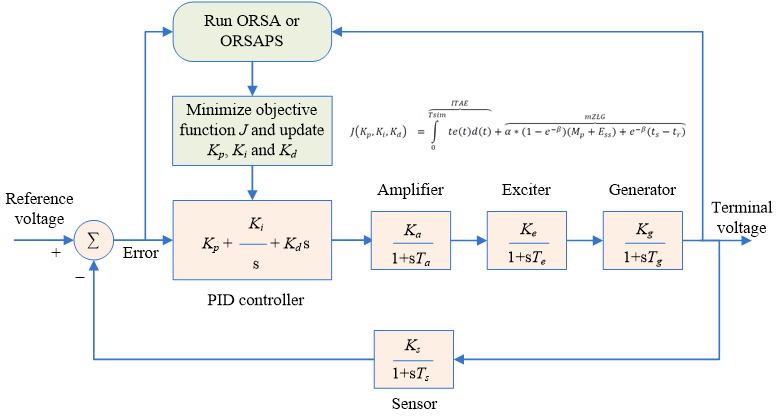
Determination of AVR System PID Controller Parameters Using Improved Variants of Reptile Search Algorithm and a Novel Objective Function
Department of Electrical & Electronics Engineering, Faculty of Engineering and Architecture, Batman University, Batman, 72100, Turkey
* Corresponding Author: Baran Hekimoğlu. Email:
Energy Engineering 2023, 120(7), 1515-1540. https://doi.org/10.32604/ee.2023.029024
Received 26 January 2023; Accepted 31 March 2023; Issue published 04 May 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Two novel improved variants of reptile search algorithm (RSA), RSA with opposition-based learning (ORSA) and hybrid ORSA with pattern search (ORSAPS), are proposed to determine the proportional, integral, and derivative (PID) controller parameters of an automatic voltage regulator (AVR) system using a novel objective function with augmented flexibility. In the proposed algorithms, the opposition-based learning technique improves the global search abilities of the original RSA algorithm, while the hybridization with the pattern search (PS) algorithm improves the local search abilities. Both algorithms are compared with the original RSA algorithm and have shown to be highly effective algorithms for tuning the PID controller parameters of an AVR system by getting superior results. Several analyses such as transient, stability, robustness, disturbance rejection, and trajectory tracking are conducted to test the performance of the proposed algorithms, which have validated the good promise of the proposed methods for controller designs. The performances of the proposed design approaches are also compared with the previously reported PID controller parameter tuning approaches to assess their success. It is shown that both proposed approaches obtain excellent and robust results among all compared ones. That is, with the adjustment of the weight factor , which is introduced by the proposed objective function, for a system with high bandwitdh (), the proposed ORSAPS-PID system has 2.08% more bandwidth than the proposed ORSA-PID system and 5.1% faster than the fastest algorithm from the literature. On the other hand, for a system where high phase and gain margins are desired (), the proposed ORSA-PID system has 0.53% more phase margin and 2.18% more gain margin than the proposed ORSAPS-PID system and has 0.71% more phase margin and 2.25% more gain margin than the best performing algorithm from the literature.Graphic Abstract
Keywords
Reptile search algorithm; pattern search; multidirectional search; metaheuristics; automatic voltage regulator; optimal PID controller
Cite This Article
APA Style
Hekimoğlu, B. (2023). Determination of AVR System PID Controller Parameters Using Improved Variants of Reptile Search Algorithm and a Novel Objective Function. Energy Engineering, 120(7), 1515–1540. https://doi.org/10.32604/ee.2023.029024
Vancouver Style
Hekimoğlu B. Determination of AVR System PID Controller Parameters Using Improved Variants of Reptile Search Algorithm and a Novel Objective Function. Energ Eng. 2023;120(7):1515–1540. https://doi.org/10.32604/ee.2023.029024
IEEE Style
B. Hekimoğlu, “Determination of AVR System PID Controller Parameters Using Improved Variants of Reptile Search Algorithm and a Novel Objective Function,” Energ. Eng., vol. 120, no. 7, pp. 1515–1540, 2023. https://doi.org/10.32604/ee.2023.029024
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools