
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Application of Hankel Dynamic Mode Decomposition for Wide Area Monitoring of Subsynchronous Resonance
1 State Grid Hebei Electric Power Research Institute, Shijiazhuang, 050021, China
2 State Grid Hebei Electric Power Company, Shijiazhuang, 050021, China
3 The College of Electrical Engineering, Sichuan University, Chengdu, 610065, China
* Corresponding Author: Xiaomei Yang. Email:
Energy Engineering 2023, 120(4), 851-867. https://doi.org/10.32604/ee.2023.025383
Received 08 July 2022; Accepted 09 October 2022; Issue published 13 February 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In recent years, subsynchronous resonance (SSR) has frequently occurred in DFIG-connected series-compensated systems. For the analysis and prevention, it is of great importance to achieve wide area monitoring of the incident. This paper presents a Hankel dynamic mode decomposition (DMD) method to identify SSR parameters using synchrophasor data. The basic idea is to employ the DMD technique to explore the subspace of Hankel matrices constructed by synchrophasors. It is analytically demonstrated that the subspace of these Hankel matrices is a combination of fundamental and SSR modes. Therefore, the SSR parameters can be calculated once the modal parameter is extracted. Compared with the existing method, the presented work has better dynamic performances as it requires much less data. Thus, it is more suitable for practical cases in which the SSR characteristics are time-varying. The effectiveness and superiority of the proposed method have been verified by both simulations and field data.Keywords
Nomenclature
| frequency of subsynchronous component | |
| damping of subsynchronous component | |
| amplitude of subsynchronous component | |
| frequency of fundamental component | |
| amplitude of fundamental component | |
| reporting frequency for PMU | |
| synchrophasor provided in PMU | |
| reported synchrophasor |
The fast growth and application of doubly-fed induction generators (DFIGs) in series compensated systems have significantly increased the occurrence of subsynchronous resonance (SSR) [1]. Recent SSR events in south Texas of USA [2] and North China [3,4] indicated that the oscillation could be system-wide which involves complex interactions among grid components. It is thus of great importance to provide a wide area monitoring of SSR parameters, including the magnitude, frequency and damping. The data are crucial for replicating SSR events, identifying the sources of SSR [5] and supporting the design of countermeasures, e.g., feedback-linearized sliding mode controller [6], energy-shaping L2-gain controller [7], damping controller [8].
To date, two types of data have been considered for SSR parameter identification (SSRPI). One is the waveform data provided by the fault recorder. This type of data contains the complete information of the oscillation and thus can be easily utilized for SSRPI through various signal-processing algorithms, such as Prony [9] and the recursive least square (RLS) method [10]. Additionally, model decomposition-based techniques, such as the Hilbert-Huang transform [11] and variational mode decomposition (VMD) [12], can perform parameter identification decomposition after the time signals are decomposed into multifrequency mode components. Unfortunately, the fault recorder is locally stored, and whether it records the SSR data depends on the triggering mechanism. This deficiency imposes great challenges for wide area monitoring or system-wide analysis [13].
Another option is to take advantage of the synchrophasors provided by the wide area monitoring system (WAMS). Currently, phasor measurement units (PMUs) have been widely deployed in transmission networks [14], making the WAMS a promising platform for SSR monitoring. The main challenge here is that the synchrophasor only captures the fundamental phasors. As a result, the SSR components will appear as the spectral leakage components. Studies have been conducted to address this issue. The work in [15] demonstrated that it is possible to identify the SSR frequency from synchrophasors. Recently, some modal parameter extraction methods, e.g., classic Prony analysis, estimation of signal parameters via the rotational invariance technique (ESPRIT) and the matrix pencil method [16], have been developed to extract the SSO parameters. In addition, the recent study in [17] further proposed a DFT-based correction method to recover the SSR amplitude from spectral leakage components. An interpolated DFT (InpDFT)-based method was also proposed in [13] to achieve better identification accuracy through the consideration of damping parameters.
However, the DFT-based methods rely on a long data window to obtain better accuracy for estimating the SSR parameters and assume that these parameters are constant within the window. In practice, the SSR parameters are usually time-varying due to the stochastic nature of wind resources and the volatile operation conditions of the grid [3]. When a short window is used in DFT-based methods for analyzing nonstationary signals, the spectrum of the SSR component in the synchrophasors will be significantly affected by spectral leakage from the fundamental frequency phasors. In this way, large estimation errors are unavoidable.
Within this context, this paper proposes a signal analysis technique based on dynamic mode decomposition (DMD). DMD seeks a linear dynamic operator to best approximate the underlying dynamics of the system. Its performance has been found to be satisfactory in a wide variety of applications, including fluid communities [18], biomedical fields [19] and power system areas. As an example, the work in [20] successfully applied DMD for spatiotemporal PMU data to monitor low-frequency oscillations.
In this paper, we implemented the key parameter estimation of SSR by using the DMD method from the eigenvalues of Hankel matrices after the behavior of the synchrophasors under SSR is analyzed. The contributions of this paper include the following: (1) temporal synchrophasors with less data (less than 1 s) are used to construct two Hankel matrices, and the computational efficiency is improved. Note that only a single channel of measurement is required here. (2) The DMD method is performed on two Hankel matrices to estimate the parameters of SSR, and the number of dominant modes is automatically determined rather than predetermined; thus, the dynamic performance of SSR is captured well. (3) The proposed method is performed on simulation and field data, demonstrating the effectiveness of the proposed method.
The remainder of the paper is organized as follows. Section 2 analyzes the behavior of synchrophasors under SSR and defines the DMD problem to be solved. The Hankel-DMD method is explained in Section 3 for the identification of SSR components. Section 4 verifies the effectiveness of the proposed method by using simulation data and field data under dynamic and noisy conditions. A comparative study is also conducted to show the superiority of the proposed method.
2 Synchrophasor Model under SSR
This paper focuses on the SSR caused by the interaction between DFIGs and series-compensated systems. For such cases, all wind farms and the network are engaged in one SSR mode [3,4,21]. As a result, the current waveform data in the time domain under SSR can be expressed as
where
Commonly, synchrophasors are obtained by applying a discrete Fourier transform (DFT) on
where
Let
with
where
At the
bin (i.e.,
Assuming that
Generally, a series of
with
where
By defining
and
we rewrite (7) as
which denotes that
where
Eq. (12) indicates that the synchrophasors under SSR are a linear combination of four phasors rotating at different frequencies. The index
3 Synchrophasor Model under SSR
This section first presents a Hankel-DMD method in which two Hankel matrices are constructed to satisfy the requirement of applying DMD. Then, the equations to calculate the frequency, damping and amplitude of the SSR are analytically derived.
3.1 Hankel-Dynamic Mode Decomposition
One premise to perform DMD is that the rank of the measurement matrix needs to be no less than the number of the dominant modes [22,23]. In the case that the measurement matrix is a series of temporal synchrophasors, its rank would be one, which is insufficient for SSRPI [22]. To address this issue, the concept of Hankel matrices is used here. For the
and
where
Actually,
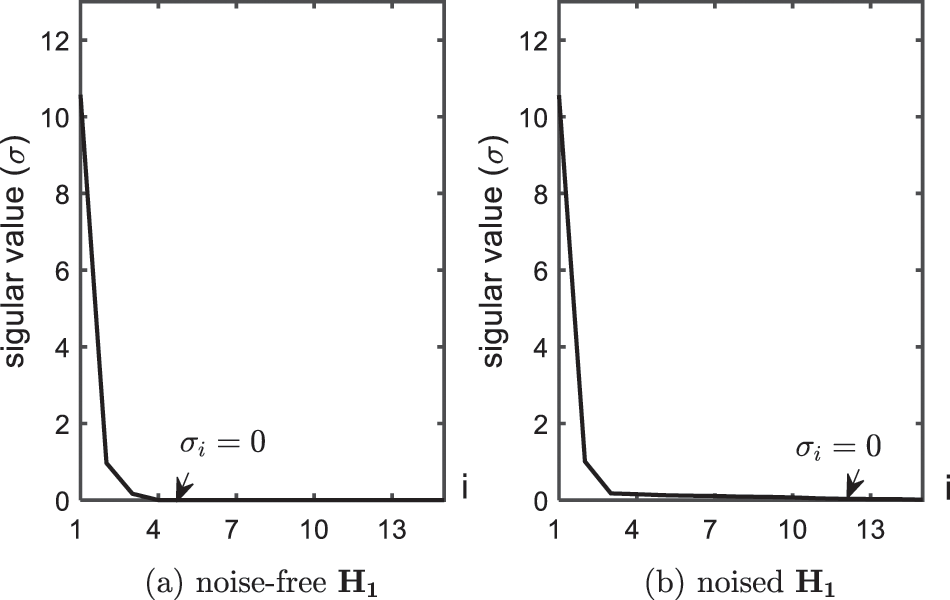
Figure 1: Singular value of
With the derivation in the Appendix, the relationship of
where
where
and
where
To reduce the impact of noise, reduced SVD is performed to seek the low-dimensional representation of
where
By retaining the first
where
The matrix
Since
where
where
3.2 Calculation of SSR Parameters
The modal parameters are obtained from the eigenvalues of
where
where
Once
with
where
where
Finally, the amplitude
where
The proposed Hankel-DMD method provides a good dynamic performance, as it uses a very short data window for SSRPI. Under noise-free conditions, the proposed method can perform well as long as the dimensions of the constructed
Another parameter that affects the performance of DMD is the selection of the number of dominant modes, i.e.,
where
where
3.4 The Procedure of SSR Parameter Estimation
The whole procedure of the Hankel-DMD method to identify three key parameters of the SSR component, i.e.,
• Construct two Hankel matrices
• Perform SVD of
• Calculate
• Perform eigen-decomposition of
• Identify
• Identify
This section evaluates the performance of the proposed method using both simulations and field data. Comparative studies with the InpDFT method [13] and classical Prony method are also presented.
A synthetic SSR current data was constructed as (31), where an off-nominal frequency
The parameters of the SSR components, i.e.,
Fig. 2a shows the waveform of
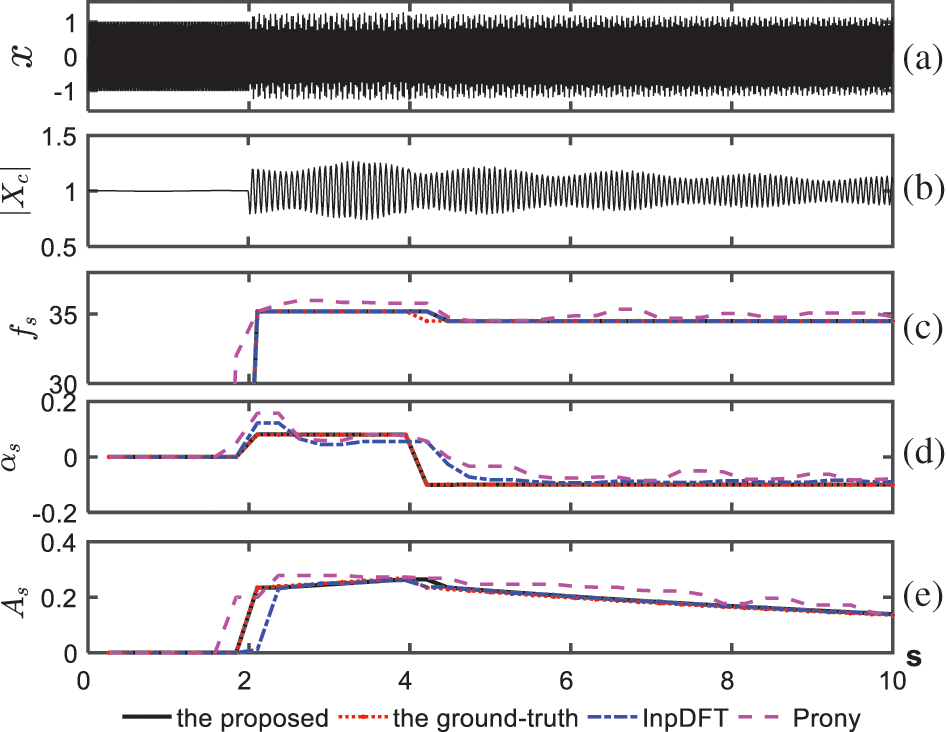
Figure 2: Synthetic SSR data and estimated results by using the proposed method and two other comparative methods for noise-free synthetic data, where each computational window applies
The proposed method applies a sliding window to identify the parameters of SSR, and each window contains
In another test, Gaussian noise was also added to the signal. According to our field data and those reported in the literature [24], the noises in practical PMU data are generally around a signal-to-noise ratio SNR = 45 dB. Thus, the paper considers noise with SNR = 40 dB. The results obtained from the proposed and two comparative methods are shown in Figs. 3b–3d. Since Prony is sensitive to noise, the results of Prony become worse, showing a large deviation from the ground truth under noisy conditions. The proposed method also coincides better with the true values than the InpDFT and Prony methods. Comparatively, the estimation of
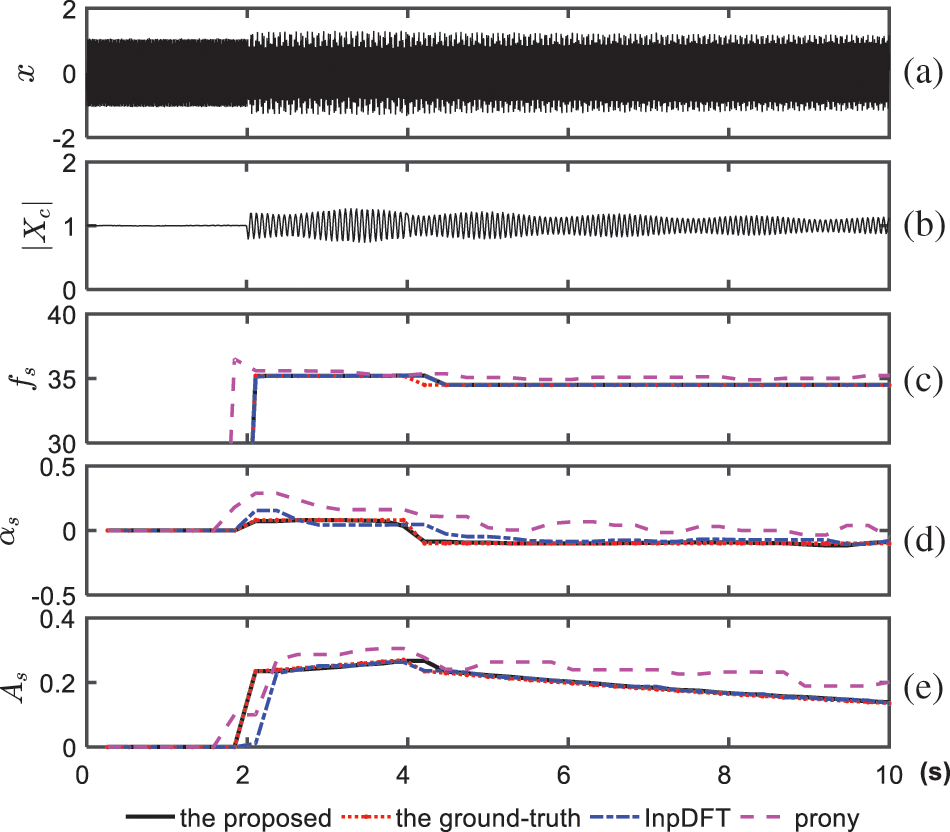
Figure 3: Synthetic SSR data and estimated results by using the proposed method and two other comparative methods for 40 dB noised synthetic data, where each computational window applies
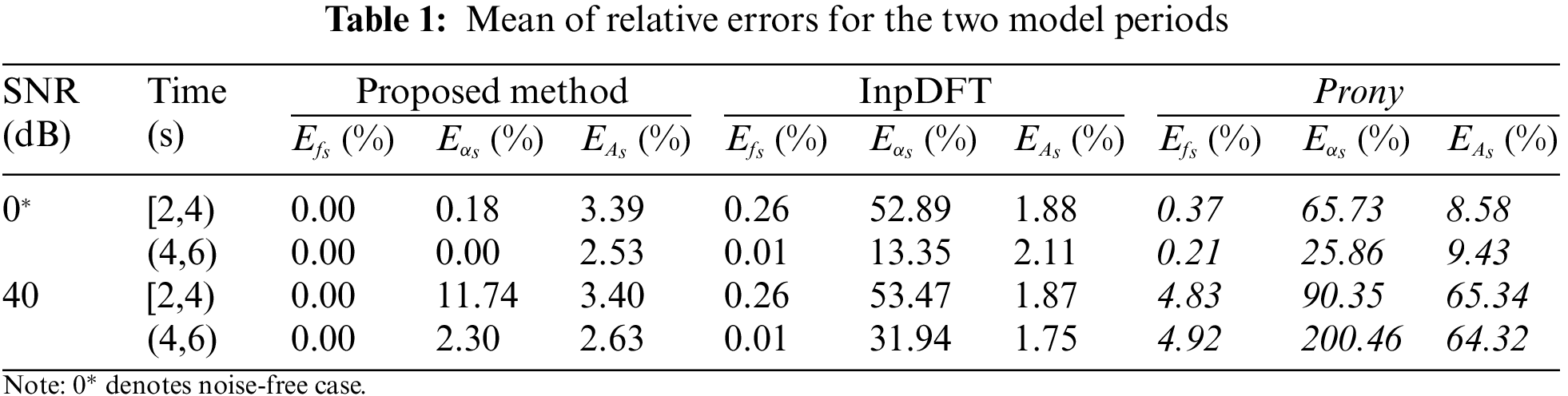
Furthermore, the mean errors of the three methods are displayed in Table 1 for two model periods, i.e., [2,4) s and (4,6] s, as shown in Fig. 2a. The mean errors
where
The proposed method was further tested by simulated SSR data. For this purpose, a series-compensated wind farm system was modeled in MATLAB/Simulink software, as shown in Fig. 4a. A sixth-order model of the induction machine is used, with a two-mass drive train model to represent the generator shaft. Figs. 4b and 4c show the control strategies of the grid-side converter (GSC) and the rotor-side converter (RSC), respectively. Table 2 provides the key system parameters, and further details of the simulation model can be found in [25].
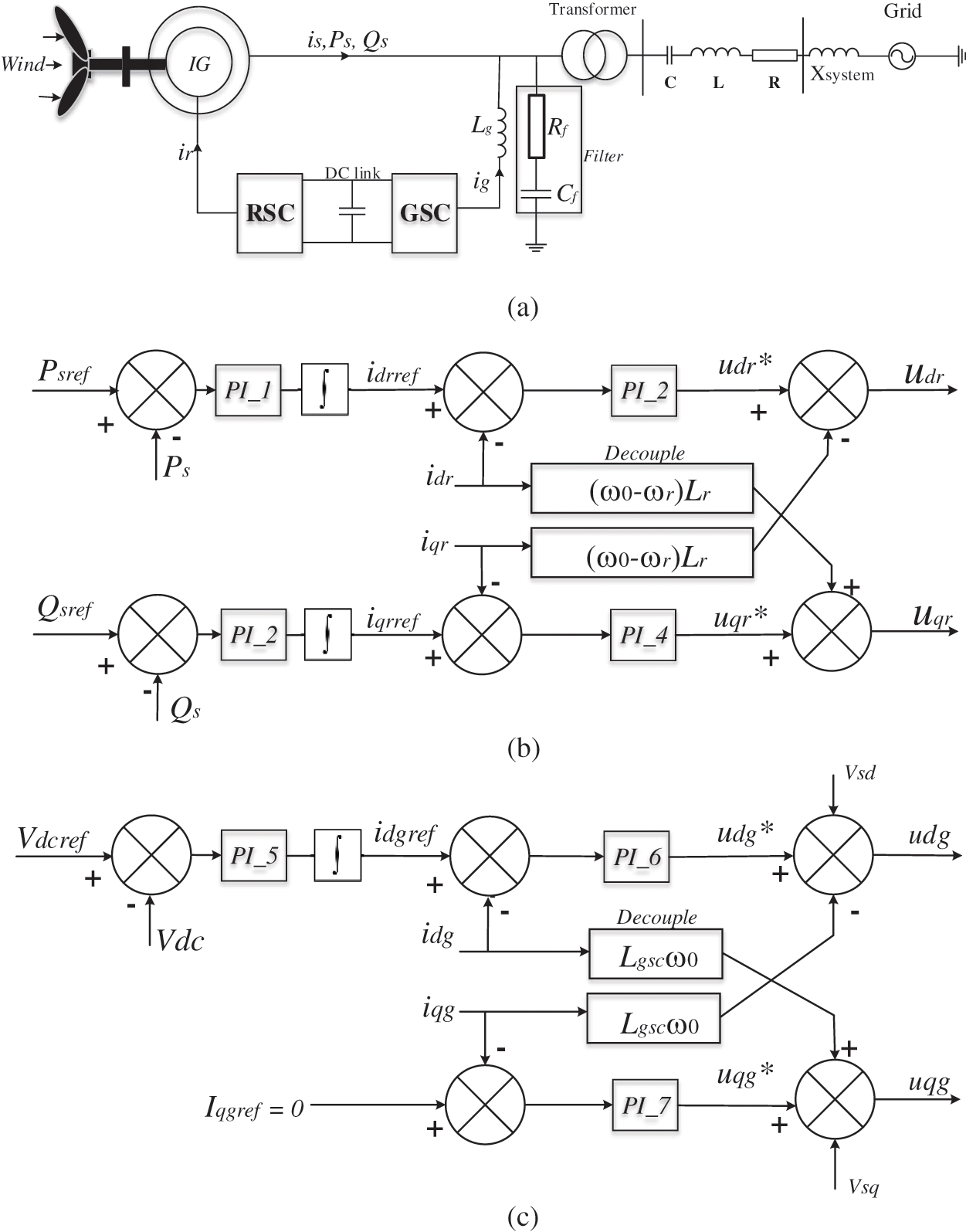
Figure 4: Simulated series-compensated DFIG-based wind farm. (a) System structure, (b) control block diagram of the RSC, and (c) control block diagram of the GSC

An SSR event is initiated at
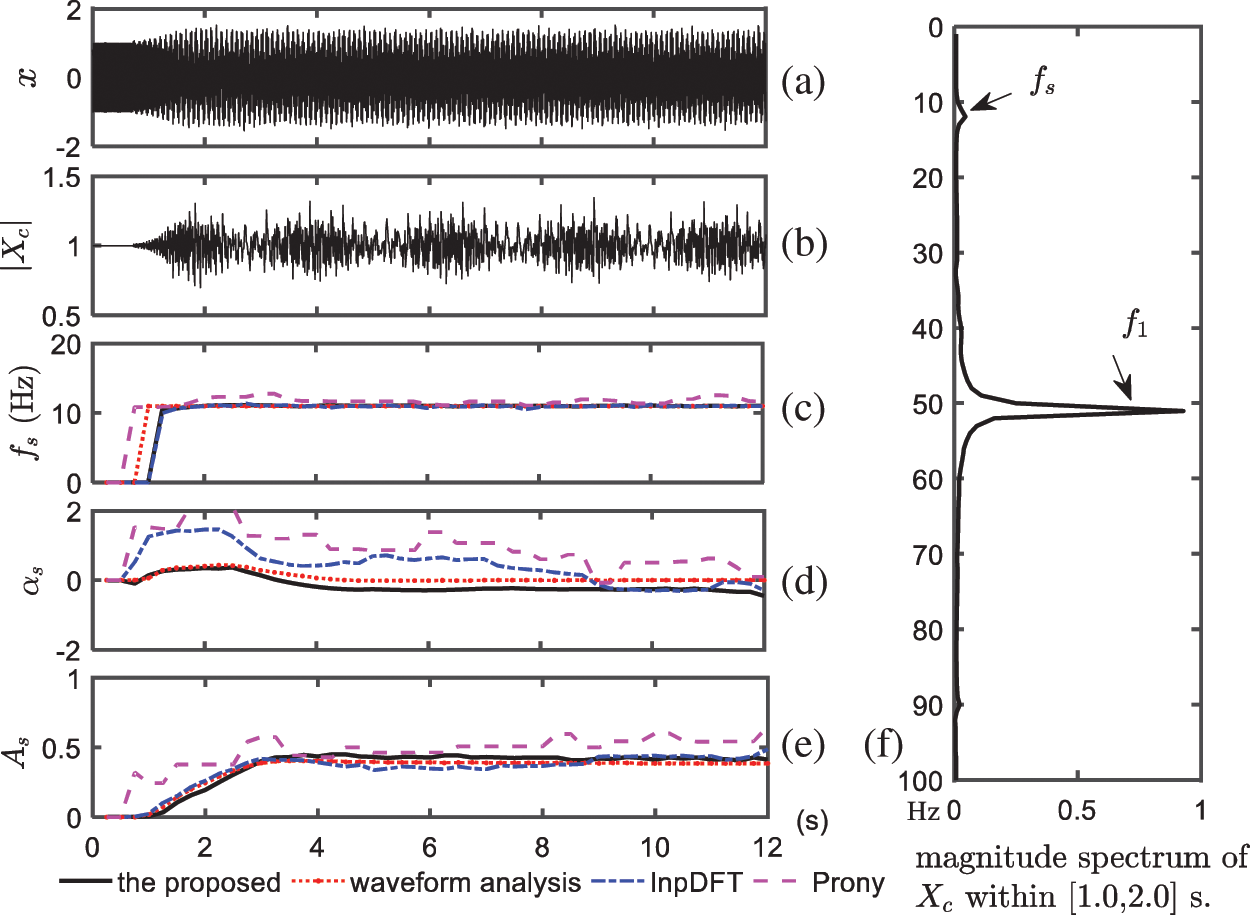
Figure 5: Simulated SSR data and results from the four methods. (a) Instantaneous current
After the proposed method was performed on each window with
This subsection investigates the performance of the proposed method using practical SSR incidents that occurred in North China. Two sets of field data at different periods are used. Figs. 6a and 7a show the waveform data provided by the fault recorder with a sampling rate of 1000 Hz, while the magnitude of the corresponding synchrophasors is shown in Figs. 6b and 7b. It can be seen that the SSR mode varies over time. The possible reasons could be the tripping of wind generators and the change in the wind speed.
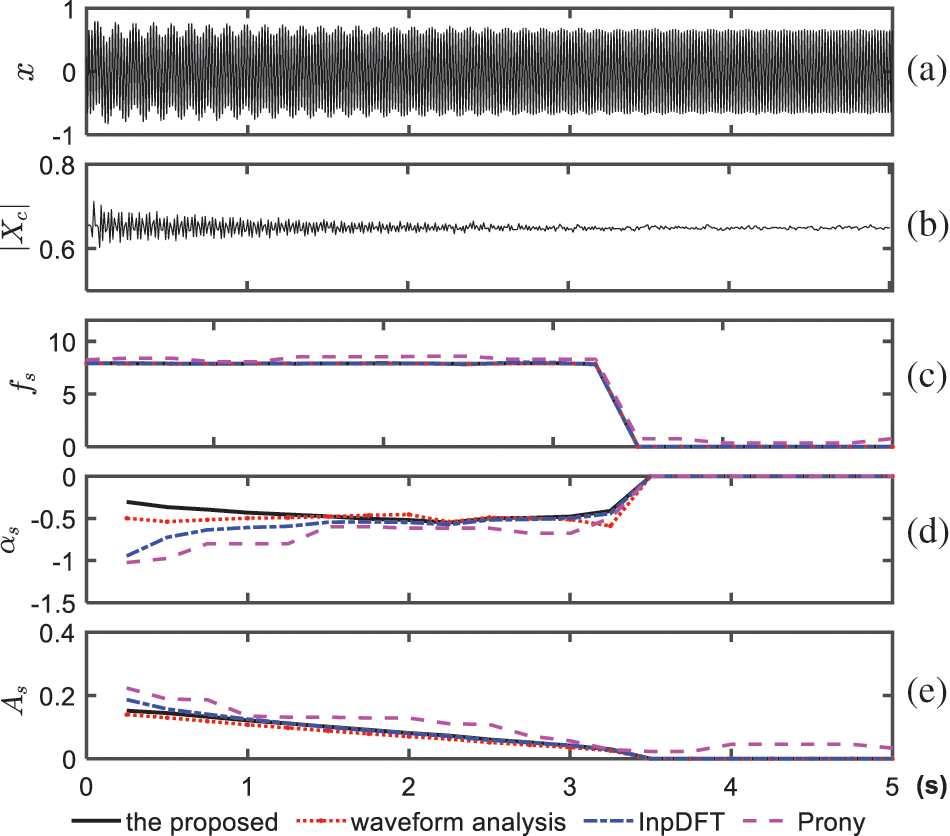
Figure 6: First set of field SSR data and estimated results from the four methods. (a) Instantaneous current
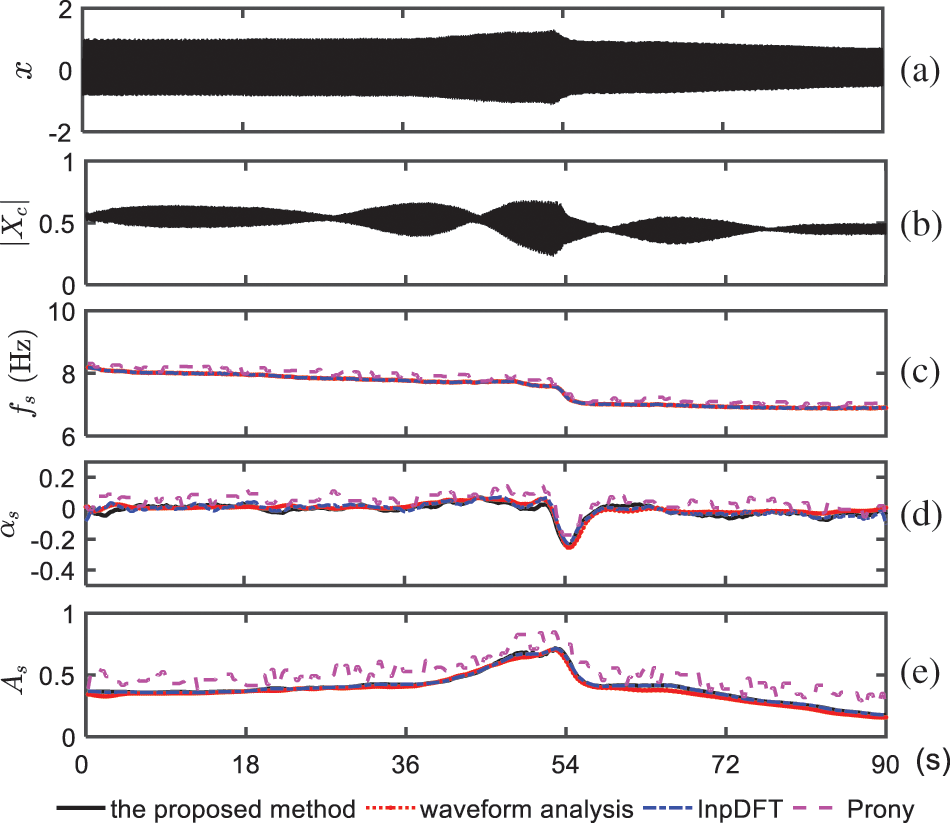
Figure 7: Second set of Field SSR data and estimated results from the four methods. (a) Instantaneous current
The estimation results of the first case are shown in Figs. 6c–6e. Similarly, the InpDFT and Prony methods are considered for comparison, and waveform-based analysis is used as a reference. According to the results, the estimation of the proposed method matches well with the reference value, while the damping results estimated by the two comparative methods deviate from those of the proposed method and waveform analysis.
The estimation results of the second case are shown in Figs. 7c–7e. Different from the first case, the off-nominal condition in the second period is not severe. As a result, the curves of the estimated parameters from the proposed and InpDFT methods match well, whereas the Prony method still cannot achieve satisfactory estimation and cannot effectively capture the variation in the damping and amplitude. The estimated
This paper presented a Hankel-DMD-based method to identify SSR parameters using synchrophasor data. Through rigorous analytical derivation, it is revealed that SSRPI can be formulated as a DMD problem. By taking advantage of the Hankel matrix, which increases the modes of the subspace, the SSR parameters can be identified using a single channel of synchrophasor data within one second. Its performance has been verified using both simulation and field data. Comparative studies also demonstrate its superiority when compared with state-of-the-art algorithms. Therefore, it is expected that the proposed method can serve as an effective tool for wide area monitoring of SSR parameters.
Funding Statement: This work was supported by the China Key Technology Research on Risk Perception of Sub-Synchronous Oscillation of Grid with Large-Scale New Energy Access SGTYHT/21-JS-223.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Suriyaarachchi, D. H. R., Annakkage, U. D., Karawita, C., Jacobson, D. A. A. (2013). Procedure to study sub-synchronous interactions in wind integrated power systems. IEEE Transactions on Power Systems, 28(1), 377–384. DOI 10.1109/TPWRS.2012.2204283. [Google Scholar] [CrossRef]
2. Lawrence, C., Gross Jr, P. (2010). Sub-synchronous grid conditions: New event, new problem, and new solutions. Proceedings of the Western Protective Relay Conference, vol. 37, pp. 1–19. Spokane. [Google Scholar]
3. Xie, X., Xu, Z., Liu, H., Hui, L., Li, Y. et al. (2017). Characteristic analysis of subsynchronous resonance in practical wind farms connected to series-compensated transmissions. IEEE Transactions on Energy Conversion, 32(3), 1117–1126. DOI 10.1109/TEC.2017.2676024. [Google Scholar] [CrossRef]
4. Liang, W., Xie, X., Jiang, Q., Hui, L., Liu, H. (2015). Investigation of SSR in practical DFIG-based wind farms connected to a series-compensated power system. IEEE Transactions on Power Systems, 30(5), 2772–2779. DOI 10.1109/TPWRS.2014.2365197. [Google Scholar] [CrossRef]
5. Xie, X., Zhan, Y., Shair, J., Ka, Z., Chang, X. (2019). Identifying the source of subsynchronous control interaction via wide-area monitoring of sub/super-synchronous power flows. IEEE Transactions on Power Delivery, 35(5), 2177–2185. DOI 10.1109/TPWRD.2019.2963336. [Google Scholar] [CrossRef]
6. Li, P., Xiong, L., Wu, F., Ma, M., Wang, J. (2019). Sliding mode controller based on feedback linearization for damping of sub-synchronous control interaction in DFIG-based wind power plants. International Journal of Electrical Power & Energy Systems, 107(3), 239–250. DOI 10.1016/j.ijepes.2018.11.020. [Google Scholar] [CrossRef]
7. Li, P., Xiong, L., Wu, F., Ma, M., Huang, S. et al. (2022). Energy-shaping L2-gain controller for PMSG wind turbine to mitigate subsynchronous interaction. International Journal of Electrical Power & Energy Systems, 135(3), 107571. DOI 10.1016/j.ijepes.2021.107571. [Google Scholar] [CrossRef]
8. Alawasa, K. M., Mohamed, Y. A. I. (2015). A simple approach to damp SSR in series-compensated systems via reshaping the output admittance of a nearby VSC-based system. IEEE Transactions on Industrial Electronics, 62(5), 2673–2682. DOI 10.1109/TIE.2014.2363622. [Google Scholar] [CrossRef]
9. Netto, M., Mili, L. (2017). A robust prony method for power system electromechanical modes identification. Proceedings of the IEEE PES General Meeting, 18, 167–173. DOI 10.1109/PESGM.2017.8274323. [Google Scholar] [CrossRef]
10. Ning, Z., Trudnowski, D. J., Pierre, J. W., Mittelstadt, W. A. (2008). Electromechanical mode online estimation using regularized robust RLS methods. IEEE Transactions on Power Systems, 23(4), 1670–1680. DOI 10.1109/TPWRS.2008.2002173. [Google Scholar] [CrossRef]
11. Laila, D. S., Messina, A. R., Pal, B. C. (2009). A refined Hilbert-Huang transform with applications to inter-area oscillation monitoring. IEEE Transactions on Power Systems, 24(2), 610–620. DOI 10.1109/TPWRS.2009.2016478. [Google Scholar] [CrossRef]
12. Arrieta Paternina M. R., Tripathy R. K., Zamora-Mendez A., Dotta D. (2019). Identification of electromechanical oscillatory modes based on variational mode decomposition. Electric Power Systems Research, 167(3), 71–85. DOI 10.1016/j.epsr.2018.10.014. [Google Scholar] [CrossRef]
13. Yang, X., Zhang, J., Xie, X., Xiao, X., Wang, Y. (2020). Interpolated DFT-based identification of sub-synchronous oscillation parameters using synchrophasor data. IEEE Transaction on Smart Grid, 11(3), 2662–2675. DOI 10.1109/TSG.2019.2959811. [Google Scholar] [CrossRef]
14. Ree, J. D. L., Centeno, V., Thorp, J. S., Phadke, A. G. (2010). Synchronized phasor measurement applications in power systems. IEEE Transactions on Smart Grid, 1(1), 20–27. DOI 10.1109/TSG.2010.2044815. [Google Scholar] [CrossRef]
15. Vanfretti, L., Baudette, M., Al-Khatib, I., Almas, M. S., Gjerde, J. O. (2013). Testing and validation of a fast real-time oscillation detection PMU-based application for wind-farm monitoring. Proceedings of the First International Black Sea Conference on Communications & Networking, pp. 216–221. Batumi. [Google Scholar]
16. Wang, Y., Jiang, X., Xie, X., Yang, X., Xiao, X. (2021). Identifying sources of subsynchronous resonance using wide-area phasor measurements. IEEE Transactions on Power Delivery, 36(5), 3242–3254. DOI 10.1109/TPWRD.2020.3037289. [Google Scholar] [CrossRef]
17. Zhang, F., Cheng, L., Gao, W., Huang, R. (2019). Synchrophasors-based identification for subsynchronous oscillations in power systems. IEEE Transactions on Smart Grid, 10(2), 2224–2233. DOI 10.1109/TSG.2018.2792005. [Google Scholar] [CrossRef]
18. Schmid, P. J., Sesterhenn, J. (2008). Dynamic mode decomposition of numerical and experimental data. Journal of Fluid Mechanics, 656, 5–28. DOI 10.1017/S0022112010001217. [Google Scholar] [CrossRef]
19. Solaija, M. S. J., Saleem, S., Khurshid, K., Hassan, S. A., Kamboh, A. M. (2018). Dynamic mode decomposition based epileptic seizure detection from scalp EEG. IEEE Access, 6, 38683–38692. DOI 10.1109/ACCESS.2018.2853125. [Google Scholar] [CrossRef]
20. Barocio, E., Pal, B. C., Thornhill, N. F., Messina, A. R. (2014). A dynamic mode decomposition framework for global power system oscillation analysis. IEEE Transactions on Power Systems, 30(6), 2902–2912. DOI 10.1109/TPWRS.2014.2368078. [Google Scholar] [CrossRef]
21. Gao, B., Wang, Y., Xu, W., Yang, G. (2020). Identifying and ranking sources of SSR based on the concept of subsynchronous power. IEEE Transactions on Power Delivery, 35(1), 258–268. DOI 10.1109/TPWRD.2019.2916848. [Google Scholar] [CrossRef]
22. Tu, J. H., Rowley, C. W., Luchtenburg, D. M., Brunton, S. L., Kutz, J. N. (2014). On dynamic mode decomposition: Theory and applications. Journal of Computational Dynamics, 1, 291–320. [Google Scholar]
23. Filho, E. V., dos Santos, P. L. (2019). A dynamic mode decomposition approach with hankel blocks to forecast multi-channel temporal series. IEEE Control Systems Letters, 3(3), 739–744. DOI 10.1109/LCSYS.2019.2917811. [Google Scholar] [CrossRef]
24. Brown, M., Biswal, M., Brahma, S., Ranade, S. J., Cao, H. (2016). Characterizing and quantifying noise in PMU data. Proceedings of the Power & Energy Society General Meeting, pp. 1–5. Boston. [Google Scholar]
25. Gao, B., Torquato, R., Xu, W., Freitas, W. (2019). Waveform-based method for fast and accurate identification of subsynchronous resonance events. IEEE Transactions on Power Systems, 34(5), 3626–3636. DOI 10.1109/TPWRS.2019.2904914. [Google Scholar] [CrossRef]
Appendix A. Proof of the linear combination
Let
From (12), we obtain
with
and
From (35), we can solve
where
Let
Similar to (35),
where
with
by using (36).
Thus, considering (37) and (40), we can rewrite (39) as
where a linear map
Finally, by extending the relation of the vector in (42) to the matrix, the connection of
where
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools