 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Approach for the Simulation of Linear PDEs with Constant Coefficients, Testing Multi-Dimensional Helmholtz and Wave Equations
Center of Excellence for Ocean Engineering, National Taiwan Ocean University, Keelung, 202301, Taiwan
* Corresponding Author: Chung-Lun Kuo. Email:
Digital Engineering and Digital Twin 2024, 2, 145-167. https://doi.org/10.32604/dedt.2024.042804
Received 13 June 2023; Accepted 05 December 2023; Issue published 31 December 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
A new concept of projective solution is introduced for the second-order linear partial differential equations (PDEs) endowed with constant coefficients. In terms of a projective variable the PDE is transformed to a second-order ordinary differential equation (ODE) with constant coefficients at the first time. The characteristic form appears as the coefficient preceding the second-order derivative term. Depending on the characteristic form and coefficients we can derive various parameters-dependent particular solutions, which can be adopted as the bases to expand the solution. The Helmholtz and wave equations are solved by the projection method. We project the field point to a unit characteristic vector to obtain a constant ODE, whose two linearly independent projective solutions are cosine and sine functions. When we expand the solution in terms of these functions as the bases, we can create a powerful numerical technique to solve the Helmholtz equations with high accuracy, even the wave number is quite large. We extend the results to the multi-dimensional wave equation, whose g-analytic function theory and the Cauchy-Riemann equations are deduced. We derive an effective and simple projective solutions method (PSM) used in the computations, which outperforms the conventional methods. Numerical experiments indeed verify the accuracy and efficiency of the PSM.Keywords
Nomenclature
| Wave number | |
| Domain | |
| Boundary | |
| Wave speed | |
| Projective variable | |
| Characteristic vector | |
| Directional parameter | |
| Directional parameter |
Linear and nonlinear partial differential equations (PDEs) are widespread in scientific and engineering problems. Mathematical models in physics, mechanics, and other fields can be applied to describe the physical phenomena. Many phenomena have been modeled by the linear type PDEs. However, for more complex conditions on the material property and geometric domain, the modeling requires nonlinear type PDEs. An ambitious method recently proposed is the splitting technique to linearize the nonlinear PDEs [1]. At each iterative step, we need to solve the linear PDEs, which are basic requirements in the solutions of PDEs.
For the wave equations, rare analytic solutions are gained. In most cases, we need to numerically solve the wave equations [2–6]. Recently, Chen et al. [7] developed a novel spatial-temporal radial Trefftz collocation method for 3D transient wave propagation analysis.
For the linear PDEs with constant coefficients the typical analytic processes to derive the series solutions are the separation of variables, deriving ordinary differential equations (ODEs) which are in general coefficients varying like the Bessel equation and the Legendre equation, solving the corresponding Sturm-Liouville problem to determine the eigenfunctions and eigenvalues, and finally determining the expanding coefficients to match the specified conditions. In the traditional method, we may encounter difficulty in that the solution bases are some special functions, which are not elementary functions. The analytic process would become tedious when the dimension of the linear PDE is raised. To overcome these difficulties, we will propose a novel method to transform the second-order multi-dimensional linear PDE to a second-order ODE with constant coefficients, which can greatly simplify the analytic works and derive a very powerful method with elementary functions or the compositions of elementary functions as the bases of the series solutions.
We consider a boundary value problem (BVP) for the Helmholtz equation:
where
Next, we consider an initial boundary value problem (IBVP) for the wave equation:
where
For a harmonic wave motion in the steady state, the wave equation can be reduced to the Helmholtz equation, which is also known as the reduced wave equation [8]. Recently, Fu et al. [9] applied the wave theory to the water wave interactions with multiple-bottom-seated-cylinder-array structures and provided the meshless generalized finite difference method for solving them. Owing to the popular applications of the Helmholtz equation in many areas a lot of numerical methods were developed [10–14]. Among the many methods, the singular boundary method is a powerful one to solve various engineering problems as reviewed by Fu et al. [15]. However, for the Helmholtz equation equipped with a large wave number and given in a complex domain, it is still a great challenge to solve it.
The rest of the paper is outlined sequentially. Section 2 devotes to a new approach of the second-order linear PDEs with constant coefficients, by transforming them to a second-order ODE with constant coefficients. The leading term is multiplied by the characteristic form, whose value determines the particular solutions of the PDE. In Section 3, we introduce new variables to transform the 2D and 3D Helmholtz equations to the second-order ODEs and then derive very useful bases in Section 4. The numerical tests of the 2D and 3D Helmholtz equations are carried out in Section 5. The g-analytic function theory for the wave equation is developed in Section 6, where we prove the g-analytic Cauchy-Riemann equations and provide the g-analytic function as the general solution of the wave equation. New projective bases for multi-dimensional wave equations are derived in Section 7. The numerical tests of 2D and 3D wave equations are carried out in Section 8. Finally, the conclusions are coined in Section 9.
2 New Approach of Linear PDEs with Constant Coefficients
We generalize Eqs. (1) and (3) to the d-dimensional second-order linear PDEs with constant coefficients:
where
In the characteristic theory of second-order linear PDEs, the characteristic form [8,16].
is crucial, where
We introduce a new projective variable by
where we relax
It leads to
where the prime denotes the differential of
Theorem 1. For Eq. (7) with
is a projective type solution. Here,
where the parameters
Proof. It follows from Eqs. (7), (10), and (11) that
which by Eq. (8) can be recast to Eq. (13). The fundamental solutions of Eq. (13) depend on the eigenvalue in Eq. (14), which is in general a complex eigenvalue with
where D and E are constants. Inserting Eq. (9) for
Eq. (7) belongs to the elliptic type PDEs if the characteristic equation
from which only the first-order solution can be achieved in view of
Lemma 1. For Eq. (19), if w is given by Eq. (9) and u is given by Eq. (10) then the following particular solutions are available:
where
Proof. For Eq. (19), Eq. (18) reduces to
There exists no real solution for a, unless the undesired one with
We can take
renders the real solutions of other parameters
On the other hand, we can generate particular solutions by
where
Up to now the discussions of particular solutions of the linear PDE with constant coefficients are somewhat heuristic and formal. To display the advantage of the present approach, we consider a specific PDE:
By inspection the general solution is
where a, b, c are constants, and
Let
Taking
which leads to a constant
If we take
as a particular solution. By using the Fourier series, we can generate a particular solution
This case shows that the new approach can find the general solution of Eq. (29).
These particular solutions involve the parameters, which can be employed as useful bases to expand the solution of the linear PDE with constant coefficients. Below we will give definite linear PDEs of Helmholtz and wave equations, and derive the particular solutions involving parameters as the expanding bases of the solutions.
3 New Projective Solutions of Helmholtz Equations
We first construct a new projective solution of Eq. (1) with
where w signifies the distance of the line on the plane
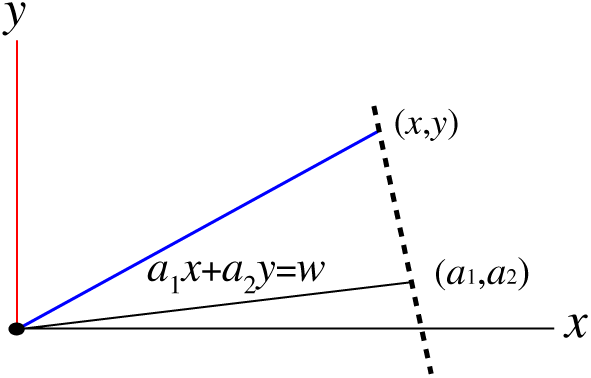
Figure 1: A schematic plot to signify a new projective solution of the 2D Helmholtz equation in terms of w, where w is the projection of
Theorem 2. For the 2D Helmholtz equation, if w is given by Eq. (36) and Eq. (37) is satisfied, then
satisfies Eq. (1) with
Proof. It follows from Eqs. (39) and (38) that
Inserting them into Eq. (1) with
If Eq. (37) and the condition (40) are satisfied, then Eq. (1) with
We extend the above results to a 3D setting. We introduce the projective variable by
and the triplet
Theorem 3. For the 3D Helmholtz equation, if w is given by Eq. (43) and Eq. (44) is satisfied, then
satisfies Eq. (1) with
Proof. It follows from Eqs. (46) and (45) that
Inserting them into Eq. (1) with
If Eq. (44) and the condition (40) are satisfied, then
4 New Bases for 2D and 3D Helmholtz Equations
Since
Correspondingly, for Eq. (1) with
where
Alternatively, for Eq. (1) with
where
Up to now, the following innovation points of the paper can be highlighted:
1. When the linear PDEs encountered are equipped with constant coefficients, the problem of finding a solution is reduced to solving the ODE with constant coefficients.
2. The problem of finding a solution is thus reduced to solving the characteristic equation, which is a simple algebraic equation for the characteristic vector.
3. For solving the algebraic equation in the complex domain, all possible bases of the considered PDE can be constructed, without using the technique of special functions.
4. The solution of the linear PDE is then expanded by the derived bases, which makes it easy to determine the expansion coefficients by the meshless collocation method.
On the other hand, the proposed projective variable method is limited by the following conditions:
1. The linear PDEs must be constant coefficients, and for the problem with varying coefficients, it is not applicable.
2. The problem is limited to the continuous one, which with some kind of discontinuity the proposed projective variable method is not applicable.
In the near future, the localization technique as applied in reference [17] may be adopted to the projective variable method for solving the linear PDEs with varying coefficients and with discontinuity.
5 Numerical Experiments of Helmholtz Equations
Now the numerical solutions of the 2D and 3D Helmholtz equations can be carried out by using the projective solutions method (PSM).
We assess the errors of
where
First, the Dirichlet problem is considered by giving an exact solution:
which is defined in a square
We take a very large wave number
Next, we consider the boundary shape to be a complex amoeba-like curve:
and we consider the same exact solution (56) with
Next, we consider a doubly-connected domain problem with the inner boundary given by Eq. (57) and the outer boundary given by
Similarly, we take a very large
To test the stability of PSM, we add a white noise with an intensity 0.01 on the Dirichlet boundary data. Upon comparing to the noisy error 0.01, quite small errors are obtained with
To demonstrate that the PSM is a well-posed method, we consider the inverse Cauchy problem on the above doubly-connected domain, where the Dirichlet and Neumann boundary data are imposed on the outer boundary. Upon comparing to the noisy error 0.01, quite small errors are obtained with
Next, the Dirichlet problem is considered for a given exact solution of the 2D Helmholtz equation with
which is defined in a domain with the boundary:
With
We consider:
where
Under
Next, we consider a bumpy sphere as the boundary:
The PSM is compared to the exact solution on
Although
6 The g-Analytic Function Theory for Wave Equation
The g-analytic function for the one-dimensional wave equation has been derived by Liu [18] based on the g-number theory. In order to derive the g-analytic function for the multi-dimensional wave equation we introduce
where d is a d-dimensional director and ∇ is a d-dimensional gradient operator with respect to x.
In terms of
By Eq. (66), we have
Summing these equations yields
due to
Liu [19] has introduced the g number
Using
we can deduce
Let
be the conjugation of w given in Eq. (65). By the chain rule we have
Accordingly, we can derive the following result.
Theorem 4. The d-dimensional wave equation,
Moreover,
by which
Proof. It is straightforward from Eq. (78) that
is the general solution of Eq. (3).
Take the operator
Take the operator
which by Eq. (67) changes to
Subtracting Eqs. (84) by (82) leads to
Conversely, the operator
Take the operator
which by Eq. (67) changes to
Subtracting Eqs. (87) by (85) leads to the second equation in Eq. (80). This ends the proof. □
In Theorem 4, Eq. (79) is the g-analytic Cauchy-Riemann equations for the multi-dimensional wave equation, which is appeared in the literature for the first time. As a demonstration of Theorem 4, we take a simple g-analytic function
such that
Using
Hence, the first g-analytic Cauchy-Riemann equation in Eq. (79) is verified. By
the second g-analytic Cauchy-Riemann equation in Eq. (79) is identified.
Lemma 2. The g-analytic function
where
Proof. In view of Eq. (67) the Cauchy-Riemann equations in Eq. (79) can be written as
which are sufficient and necessary conditions for
Inserting them into the second one in Eq. (88), yields
which renders
Thus, the first one in Eq. (88) is proved. □
Lemma 2 is interesting that any differentiable function
Lemma 3. The polynomial
where
Proof. The Minkowski length of
where we suppose that
Thus from Eq. (65), we have
Let
and from
By Eqs. (99) and (74), we have
hence the first identity in Eq. (95) is proven by taking the power
By Eq. (98), Eq. (102) can be recast to
Taking the exponential generates
which makes
The powers are given by
and the combinations of them yield
We end the proof. The derivation of Eq. (95) is similar to the time-like vector with
Eq. (95) is a novel polynomial solution of the wave equation. As a demonstration of Lemmas 2 and 3, we consider
such that
It is easy to verify
and by
7 New Projective Bases for Multi-Dimensional Wave Equations
For the wave equations, we have the following results.
Theorem 5. For the 2D wave equation of Eq. (3) with
where
Proof. We begin with
where the pair
It follows from Eq. (111) that
Let
Then, we have
Inserting them into Eq. (3) with
By Eq. (112), it reduces to
To satisfy this equation we must take
Any twice differentiable function
Then, in view of Eqs. (114), (118), (119), (111) and (112), we can obtain Eqs. (109) and (110) by taking the real and imaginary parts of
where
Theorem 6. For the 3D wave equation of Eq. (3) with
where
Proof. Since the proof is similar to that in Theorem 5, we omit it. □
Eqs. (109) and (110) alone cannot form the bases. Therefore, we generalize them to a series of numbers
Consequently, for Eq. (3) with
where the last two bases are obtained from Lemma 3. The number kc/T is the frequency of the kth-order cosine and sine bases, and T is a given value. For low-frequency waves, we take a large value of T, while for high-frequency waves we take a small value of T.
Alternatively, for Eq. (3) with
where T is a parameter, and
Remark 1. Let us consider the one-dimensional wave equation
where
Remark 2. The present theory is also an extension of the d’Alembert solutions
to be the general solution of Eq. (3) with
8 Numerical Tests of 2D and 3D Wave Equations
Now we are in a good position to test the bases in Eqs. (124) and (125) used in the solutions of 2D and 3D wave equations.
We consider the following exact solution [20,21]:
and the boundary shape of the 2D domain is given by the following parametric equation:
We take
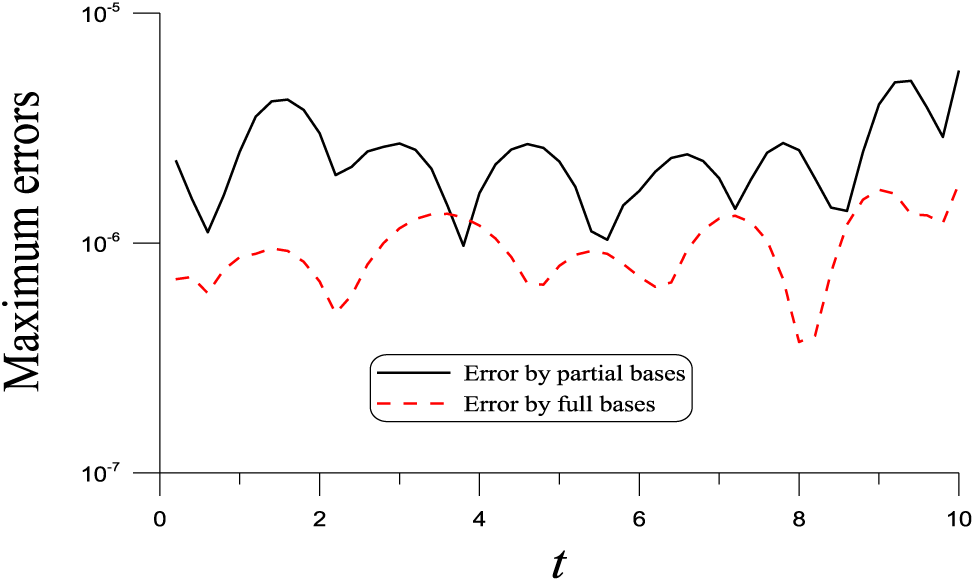
Figure 2: For Example 4 of the 2D wave equation, comparing numerical solutions with partial and full bases for a long-term solution
Therefore, we take the full bases in Eq. (124) into account with
To compare with [20], the spatial domain is changed to a unit square. With
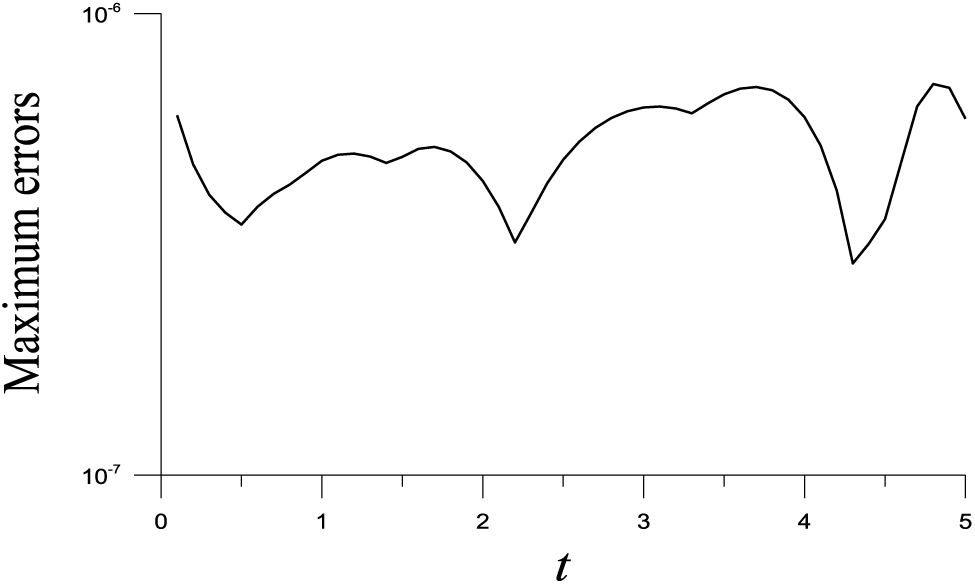
Figure 3: For Example 4 of the 2D wave equation in a unit square, showing maximum errors for a long-term solution
We consider the vibrating problem of a 2D circular membrane with zero boundary condition and zero initial velocity but with the following initial displacement:
The radius is
where
We take
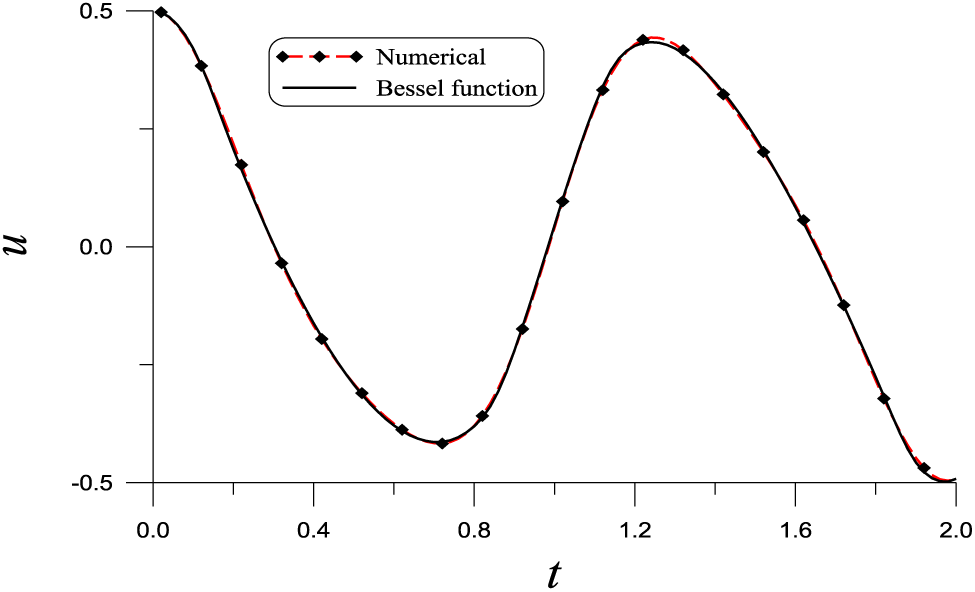
Figure 4: For Example 5 of the 2D wave equation of a vibrating circular membrane, comparing numerical solution with that obtained from the zero-order first kind Bessel function
Consider
We take
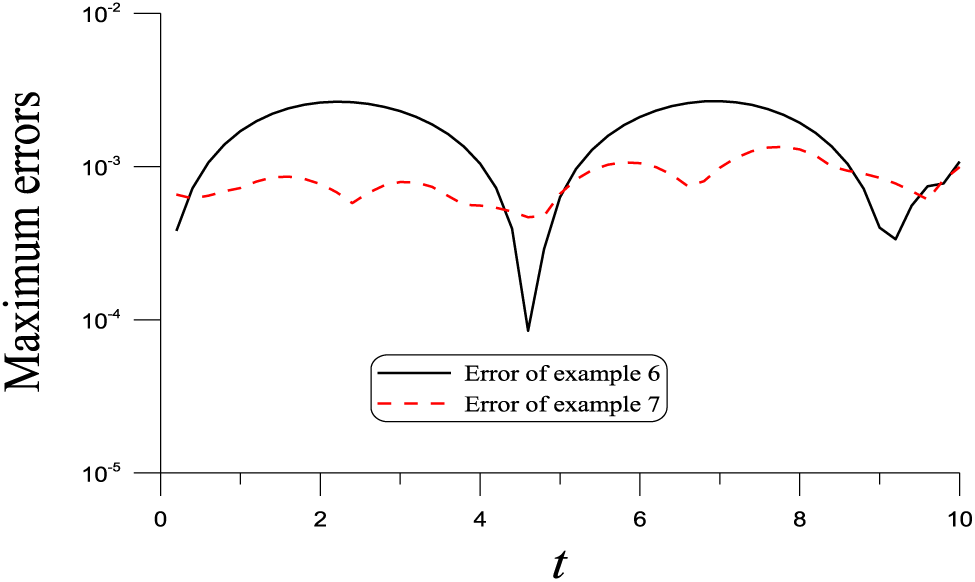
Figure 5: For Examples 6 and 7 of the 3D wave equation showing maximum errors
We give
We take
Three major topics were treated in the paper to develop the new projective solutions of linear partial differential equations (PDEs) with constant coefficients, 2D and 3D Helmholtz equations, and 2D and 3D wave equations. A new concept of projective variable is introduced, such that we can transform the PDE to the second-order ODEs with constant coefficients, whose leading term is multiplied by the characteristic form. These results are novel and not yet reported in the literature. Depending on the value of the characteristic form we can derive particular solutions involving the parameters, which are used as the useful bases to expand the solutions of linear PDE with constant coefficients. We project the field point to a unit characteristic vector to obtain a new coordinate, which can reduce the 2D and 3D Helmholtz equations to the constant ODE, and then two linearly independent projective solutions involve the unit vector as parameters. The solutions of 2D and 3D Helmholtz equations are easily expanded in terms of these functions as the bases and a powerful numerical technique was created to solve the 2D and 3D Helmholtz equations. We have established the g-analytic function theory for the wave equations. The necessary and sufficient conditions for the g-analytic function were proved to be the g-analytic Cauchy-Riemann equations. The cosine functions, sine functions, and polynomial functions are combined as the bases for the wave equations. Owing to its simple bases, the projective solutions method (PSM) outperforms the conventional methods. Numerical experiments verified the accuracy and efficiency of the PSM for solving the Helmholtz and wave equations.
Acknowledgement: The authors would like to express their great thanks to the reviewers, who supplied good opinions to improve this paper.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Chein-Shan Liu, Chung-Lun Kuo; data collection: Chung-Lun Kuo; analysis and interpretation of results: Chein-Shan Liu; draft manuscript preparation: Chein-Shan Liu, Chung-Lun Kuo. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data sharing is not applicable to this article as no new data were created or analyzed in this study.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Liu, C. S., Chang, C. W. (2023). Nonlinear Cauchy/Robin inverse problems solved by an optimal splitting-linearizing method. International Journal of Heat and Mass Transfer, 213, 124329. https://doi.org/10.1016/j.ijheatmasstransfer.2023.124329 [Google Scholar] [CrossRef]
2. Young, D. L., Ruan, J. W. (2005). Method of fundamental solutions for scattering problems of electromagnetic waves. Computer Modeling in Engineering & Sciences, 7, 223–232. [Google Scholar]
3. Shu, C., Wu, W. X., Wang, C. M. (2005). Analysis of metallic waveguides by using least square-based finite difference method. Computers, Materials & Continua, 2, 189–200. [Google Scholar]
4. Godinho, L., Tadeu, A., Amado Mendes, P. (2007). Wave propagation around thin structures using the MFS. Computers, Materials & Continua, 5, 117–128. [Google Scholar]
5. Young, D. L., Gu, M. H., Fan, C. M. (2009). The time-marching method of fundamental solutions for wave equations. Engineering Analysis with Boundary Elements, 33, 1411–1425. https://doi.org/10.1016/j.enganabound.2009.05.008 [Google Scholar] [CrossRef]
6. Gu, M. H., Young, D. L., Fan, C. M. (2009). The method of fundamental solutions for one-dimensional wave equations. Computers, Materials & Continua, 11, 185–208. [Google Scholar]
7. Chen, L., Xu, W., Fu, Z. (2022). A novel spatial-temporal radial Trefftz collocation method for 3D transient wave propagation analysis with specified sound source excitation. Mathematics, 10, 897. https://doi.org/10.3390/math10060897 [Google Scholar] [CrossRef]
8. Chester, C. R. (1970). Techniques in partial differential equations. New York: McGraw-Hill. [Google Scholar]
9. Fu, Z. J., Xie, Z. Y., Ji, S. Y., Tsai, C. C., Li, A. L. (2020). Meshless generalized finite difference method for water wave interactions with multiple-bottom-seated-cylinder-array structures. Ocean Engineering, 195, 106736. https://doi.org/10.1016/j.oceaneng.2019.106736 [Google Scholar] [CrossRef]
10. Fan, C. M., Young, D. L., Chiu, C. L. (2009). Method of fundamental solutions with external source for the eigenfrequencies of waveguides. Journal of Marine Science and Technology, 17, 164–172. https://doi.org/10.51400/2709-6998.1953 [Google Scholar] [CrossRef]
11. Chen, K., Harris, P. J. (2001). Efficient preconditioners for iterative solution of the boundary element equations for the three-dimensional Helmholtz equation. Applied Numerical Mathematics, 36, 475–489. https://doi.org/10.1016/S0168-9274(00)00021-0 [Google Scholar] [CrossRef]
12. Singer, I., Turkel, E. (1998). High-order finite difference methods for the Helmholtz equation. Computer Methods in Applied Mechanics and Engineering, 163, 343–358. https://doi.org/10.1016/S0045-7825(98)00023-1 [Google Scholar] [CrossRef]
13. Chen, W. (2002). Meshfree boundary particle method applied to Helmholtz problems. Engineering Analysis with Boundary Elements, 26, 577–581. https://doi.org/10.1016/S0955-7997(02)00028-0 [Google Scholar] [CrossRef]
14. Kuo, C. L., Yeih, W., Liu, C. S., Chang, J. R. (2015). Solving Helmholtz equation with high wave number and ill-posed inverse problem using the multiple scales Trefftz collocation method. Engineering Analysis with Boundary Elements, 61, 145–152. https://doi.org/10.1016/j.enganabound.2015.07.015 [Google Scholar] [CrossRef]
15. Fu, Z. J., Xi, Q., Gu, Y., Li, J., Qu, W. et al. (2023). Singular boundary method: A review and computer implementation aspects. Engineering Analysis with Boundary Elements, 147, 231–266. https://doi.org/10.1016/j.enganabound.2022.12.004 [Google Scholar] [CrossRef]
16. Zauderer, E. (2011). Partial differential equations of applied mathematics, 3rd edition. New York: John Wiley & Sons. [Google Scholar]
17. Fu, Z. J., Tang, Z. C., Xi, Q., Liu, Q. G., Gu, Y. et al. (2022). Localized collocation schemes and their applications. Acta Mechanica Sinica, 38, 422167. https://doi.org/10.1007/s10409-022-22167-x [Google Scholar] [CrossRef]
18. Liu, C. S. (2015). The g-analytic function theory and wave equation. Journal of Mathematics Research, 7(3), 85–98. https://doi.org/10.1557/JMR.1992.0085 [Google Scholar] [CrossRef]
19. Liu, C. S. (2000). A Jordan algebra and dynamic system with associator as vector field. International Journal of Non-Linear Mechanics, 35, 421–429. https://doi.org/10.1016/S0020-7462(99)00027-X [Google Scholar] [CrossRef]
20. Liu, C. S., Kuo, C. L. (2016). A multiple-direction Trefftz method for solving the multi-dimensional wave equation in an arbitrary spatial domain. Journal Computational Physics, 321, 39–54. https://doi.org/10.1016/j.jcp.2016.05.030 [Google Scholar] [CrossRef]
21. Gu, M. H., Fan, C. M., Young, D. L. (2011). The method of fundamental solutions for the multi-dimensional wave equations. Journal of Marine Science and Technology, 19, 586–596. [Google Scholar]
22. Liu, C. S. (2012). An equilibrated method of fundamental solutions to choose the best source points for the Laplace equation. Engineering Analysis with Boundary Elements, 36, 1235–1245. https://doi.org/10.1016/j.enganabound.2012.03.001 [Google Scholar] [CrossRef]
23. Kreyszig, E. (2006). Advanced engineering mathematics. New York: John Wiley & Sons. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools