
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Muti-Fusion Swarm Intelligence Optimization Algorithm in Base Station Coverage Optimization Problems
1 School of Petroleum, China University of Petroleum-Beijing at Karamay, Karamay, 834000, China
2 School of Arts and Sciences, China University of Petroleum-Beijing at Karamay, Karamay, 834000, China
* Corresponding Author: Zhenyu Yan. Email:
Computer Systems Science and Engineering 2023, 47(2), 2241-2257. https://doi.org/10.32604/csse.2023.040603
Received 24 March 2023; Accepted 15 May 2023; Issue published 28 July 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
As millimeter waves will be widely used in the Internet of Things (IoT) and Telematics to provide high bandwidth communication and mass connectivity, the coverage optimization of base stations can effectively improve the quality of communication services. How to optimize the convergence speed of the base station coverage solution is crucial for IoT service providers. This paper proposes the Muti-Fusion Sparrow Search Algorithm (MFSSA) optimize the situation to address the problem of discrete coverage maximization and rapid convergence. Firstly, the initial swarm diversity is enriched using a sine chaotic map, and dynamic adaptive weighting is added to the discoverer location update strategy to improve the global search capability. Diverse swarms have a more remarkable ability to forage for food and avoid predation and are less likely to fall into a “precocious” state. Such a swarm is very suitable for solving NP-hard problems. Secondly, an elite opposition-based learning strategy is added to expand the search range of the algorithm, and a t-distribution-based one-fifth rule is introduced to reduce the probability of falling into a local optimum. This fusion mutation strategy can significantly optimize the adaptability and searchability of the algorithm. Finally, the experimental results show that the MFSSA algorithm can effectively improve the coverage of the deployment scheme in the base station coverage optimization problem, and the convergence speed is better than other algorithms. MFSSA is improved by more than 10% compared to the original algorithm.Keywords
The fifth generation of mobile communication technology (5G) has gained significant attention in academia and industry due to its high bandwidth, low latency, and low power consumption [1]. This technology has demonstrated remarkable achievements in smart agriculture, smart grid, telemedicine, and environmental monitoring [2]. Furthermore, it has played an essential role in promoting the development of mobile edge computing, virtual reality, and other fields [3]. However, 5G communication technology utilizes a higher frequency band compared to 4G communication technology, resulting in smaller signal coverage of 5G base stations. Consequently, the number of 5G base stations required to be built by network providers is about three times the number of 4G base stations [4]. These base stations can be classified into two groups: macro and micro base stations, with micro base stations being further divided into small, flying, and skin base stations [5]. Although macro base stations provide more extensive coverage areas, they incur high deployment and maintenance costs [6]. In contrast, micro base stations, such as small base stations, have smaller coverage areas and lower costs, making them dynamically ideal for deployment at multiple points. Therefore, most network providers employ a combination of 5G macro base stations to operate together [7].
Micro-base stations are gaining attention from both academia and industry due to their flexibility and mobility, as well as their resistance to terrain interference [8]. As shown in Fig. 1, these stations can dynamically provide communication signal coverage for industrial IoT devices and mobile user terminals in areas with signal coverage blind spots. However, due to limited energy consumption and high user mobility, the base station must be able to develop the base station deployment scheme must be designed quickly to achieve maximum signal coverage, while ensuring high signal coverage, while ensuring high signal coverage. The problem of maximizing base station coverage is an NP-hard problem, and finding an optimal solution through mathematical inference is difficult [9]. Nevertheless, swarm intelligence optimization algorithms have proven to be more effective in solving such problems. In recent years, swarm intelligence optimization algorithms have been widely used in wireless sensor network (WSN) sensor node coverage quality problems, yielding significant results.
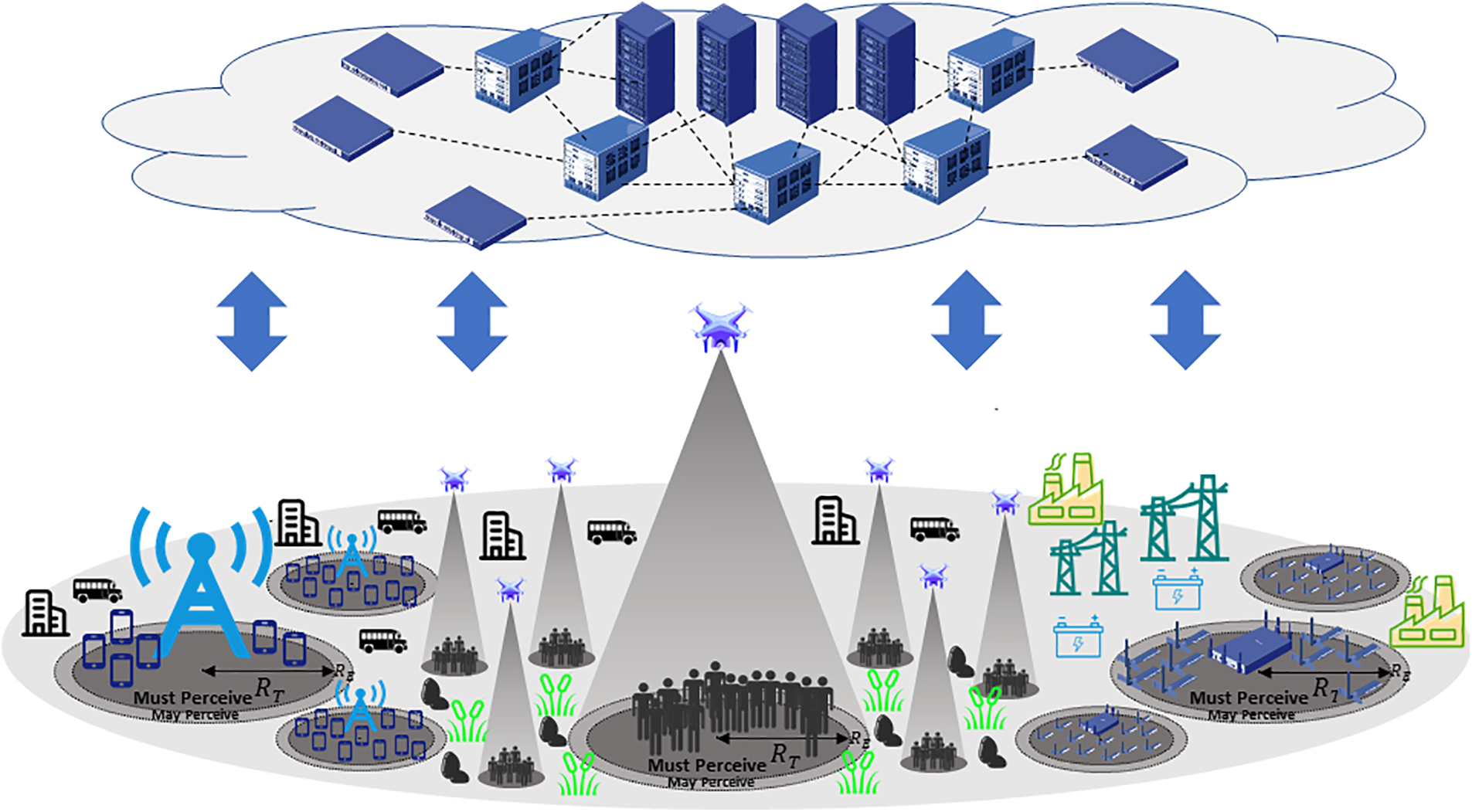
Figure 1: The application of base station fast coverage
Although mobile communication networks face many privacy protection and data security issues, their mobile and flexible advantages have conquered the majority of communication service providers [10]. In order to achieve high coverage quality and coverage convergence speed of the base station, a MFSSA coverage optimization method is proposed based on the sparrow search algorithm (SSA). Firstly, sine chaotic map is used to initialize the sparrow swarm to enrich the diversity of the initial sparrow swarm; then dynamic adaptive weighting is added to the discoverer position update strategy to accelerate the convergence speed of the algorithm while balancing the local and global search capabilities; elite opposition-based learning strategy is introduced to expand the search range of the sparrow swarm while avoiding it from falling into a “premature”. Finally, the optimal global solution obtained from the current sparrow swarm is subjected to t-distribution-based one-fifth rule to improve the pioneering ability of the swarm and reduce the probability of it falling into a local optimum.
This paper is structured as follows: Chapter 2 introduces the signal coverage model and the probabilistic optimization objective. Chapter 3 describes the specific design mechanism of the MFSSA. In Chapter 4, the efficiency and accuracy of the MFSSA are demonstrated by comparing the final coverage and convergence speed of the MFSSA with other algorithms in different scenarios. Chapter 5 gives a detailed list of recent research work. Chapter 6 provides an overall summary of the article.
The base station coverage problem requires a reasonable model simplification based on the wireless communication channel modeling theory to construct a characteristic spatial model of the signal coverage. A precise mathematical description of the base stations, users, and coverage requirements is necessary for wireless communications. Firstly, a detailed analysis of the existing beam assignment is conducted to build a plane model of the signal coverage of the base station. Secondly, a joint probabilistic perception model is constructed to consider the realistic signal interference situation and determine the problem’s final optimization objective. Finally, the problem is transformed to facilitate subsequent solutions.
Let
In wireless communication systems, directional enhancement of signal coverage is required due to the limited capacity of omnidirectional antennas and the radiation of electromagnetic waves across space. Beamforming is the design solution to enhance the signal in the horizontal direction. It involves transmitting the signal using two or more antennas with controlled delay or phase shift to create a directional constructive interference pattern. This simplifies the spatial model of signal coverage of the base station. In practical scenarios, micro base stations can move horizontally and vertically, leading to changes in their coverage radius. Assuming a micro-base station has a vertical range of movement, the signal coverage radius
If the distance between
2.2 Probability Optimization Objective
This paper adopts a probabilistic sensing model, denoted by
The coverage of the base station cluster in region
As SSA is more effective in solving the minimum value problem, this paper converts the maximum coverage problem into a minimum value problem. The objective function for solving the algorithm presented in this paper is obtained.
3 Swarm Intelligence Optimization Algorithm
SSA offers numerous advantages, such as higher search accuracy, faster convergence, stability, and robustness. Specifically, in the scenario of base station coverage, this algorithm effectively compresses the problem’s solution space, resulting in improved convergence speed. To enhance the algorithm’s global search performance, this paper introduces dynamic adaptive weighting, such as improving the convergence ability using adaptive weighting through the chaotic map. Additionally, this paper enhances the algorithm’s strong global search ability by integrating the opposition-based learning strategy and the t-distribution-based one-fifth rule.
SSA simulates various threads or functions as a group of simple agents based on the laws of nature, using specific mechanisms to achieve emergent collective intelligence. The simple swarm can be represented as follows:
where PN is the number of individuals in the swarm, i = 1, 2,..., PN; Let d be the dimensionality of the optimization variable. This paper expresses the fitness value of the swarm as a matrix.
Let
In SSA, individuals with higher fitness find food earlier and act as discoverers who provide foraging directions for followers with lower or equal fitness values. Thus, the discoverer has a larger foraging range than the follower and its position according to the following strategy.
Let
The followers update their positions according to the following strategy:
A group of vigilantes was selected to signal other individuals to avoid predation of the sparrow swarm during foraging. The percentage of individuals chosen as vigilantes ranged between 10% and 20%.
The vigilante location update strategy is as follows:
The equation describes how the sparrow swarm adjusts its foraging position during a search. The variable
3.2 Intelligent Mechanism Optimization
Uneven distribution in the randomly generated swarm can limit the search space and reduce the algorithm’s accuracy. The chaotic map can be utilized to address this issue, given its advantages of ergodicity, randomness, and regularity. It can be seen from Fig. 2 that the chaotic sequence distribution of the sine model is more uniform than that of the other two models. The sine chaotic model, which has an infinite number of mapping folds, exhibits more pronounced chaotic characteristics than the classical singer and sinusoidal models, making it particularly suitable for resolving the problem of uneven distribution following swarm initialization [11].
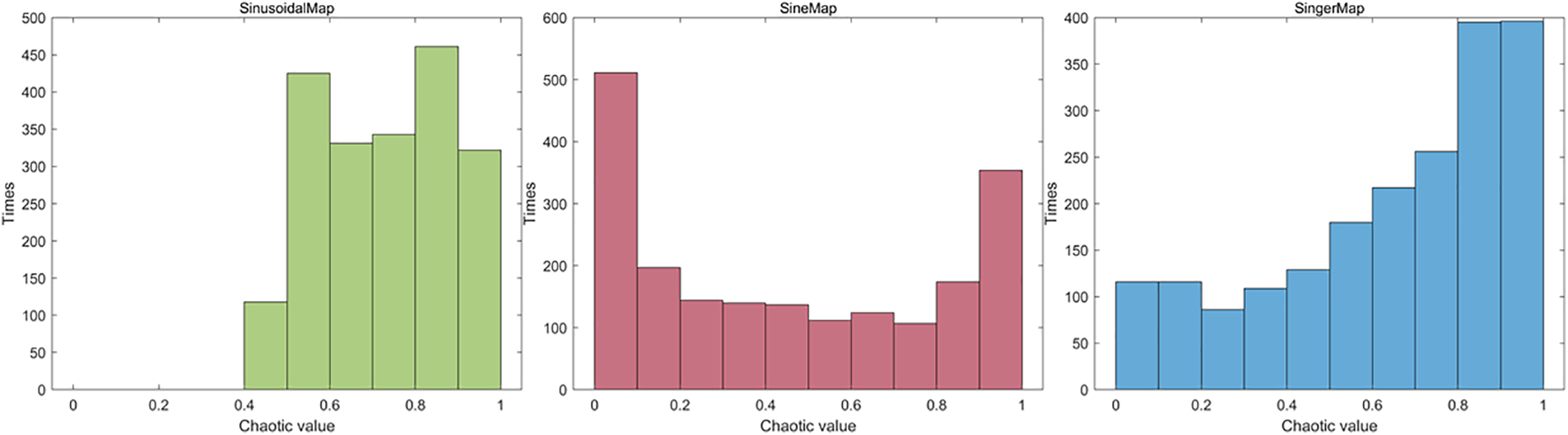
Figure 2: Chaotic sequence distributions
where
As the algorithm iterates, the discoverers and followers approach the optimal global solution, causing the search range of the swarm to decrease gradually. This, in turn, weakens the global search ability of the swarm and can lead to the algorithm getting stuck in local extrema, limiting its search accuracy. This paper introduces a dynamic adaptive weighting, denoted by the symbol
The opposition-based learning strategy enhances sparrow swarm diversity and somewhat improves the algorithm’s performance [12]. In the swarm intelligence optimization algorithm, elite individuals possess more helpful information than ordinary ones, and a swarm generated by reversing the elite individuals leads to a higher quality diversity [13]. The best individuals from the current and opposition-based swarm are chosen to form a new swarm that enters the next iteration. This way, the search process gradually leads the swarm toward the optimal global solution. The algorithm’s convergence rate increases, and too much diversity loss due to too-good elite individuals are avoided. The elite opposition-based learning strategy is defined as follows.
where
A mutation strategy is introduced to address the swarm being too homogeneous and susceptible to local optima. After an individual updates its state, mutation is performed to enhance the diversity of the sparrow swarm and allow it to jump out of local optima. Using a dimension-by-dimension variation approach can prevent mutual interference between dimensions, improving the quality of individuals post-variation [14]. The introduction of the t-distribution-based one-fifth rule effectively prevents the swarm from falling into local optima due to weak pioneering ability in the later iterations.
The discoverer’s movement direction significantly affects the foraging direction of the sparrow swarm. The one-fifth rule for all individuals in the swarm is too burdensome, which can reduce the algorithm’s search efficiency. Thus, only some of the optimal individuals from the discoverer are selected for the t-distribution-based one-fifth rule to avoid the reduction in search efficiency.
The variable denotes the result
The simulated coverage optimization problem is tackled by using sparrow foraging to search for the optimal location of the micro-base station. Each iteration involves updating the micro-base station’s position by updating the sparrow’s part. The fitness value of the sparrow at the current location is calculated to determine the optimal solution and motivate the sparrow to update its site. The implementation of MFSSA is shown in Fig. 3.
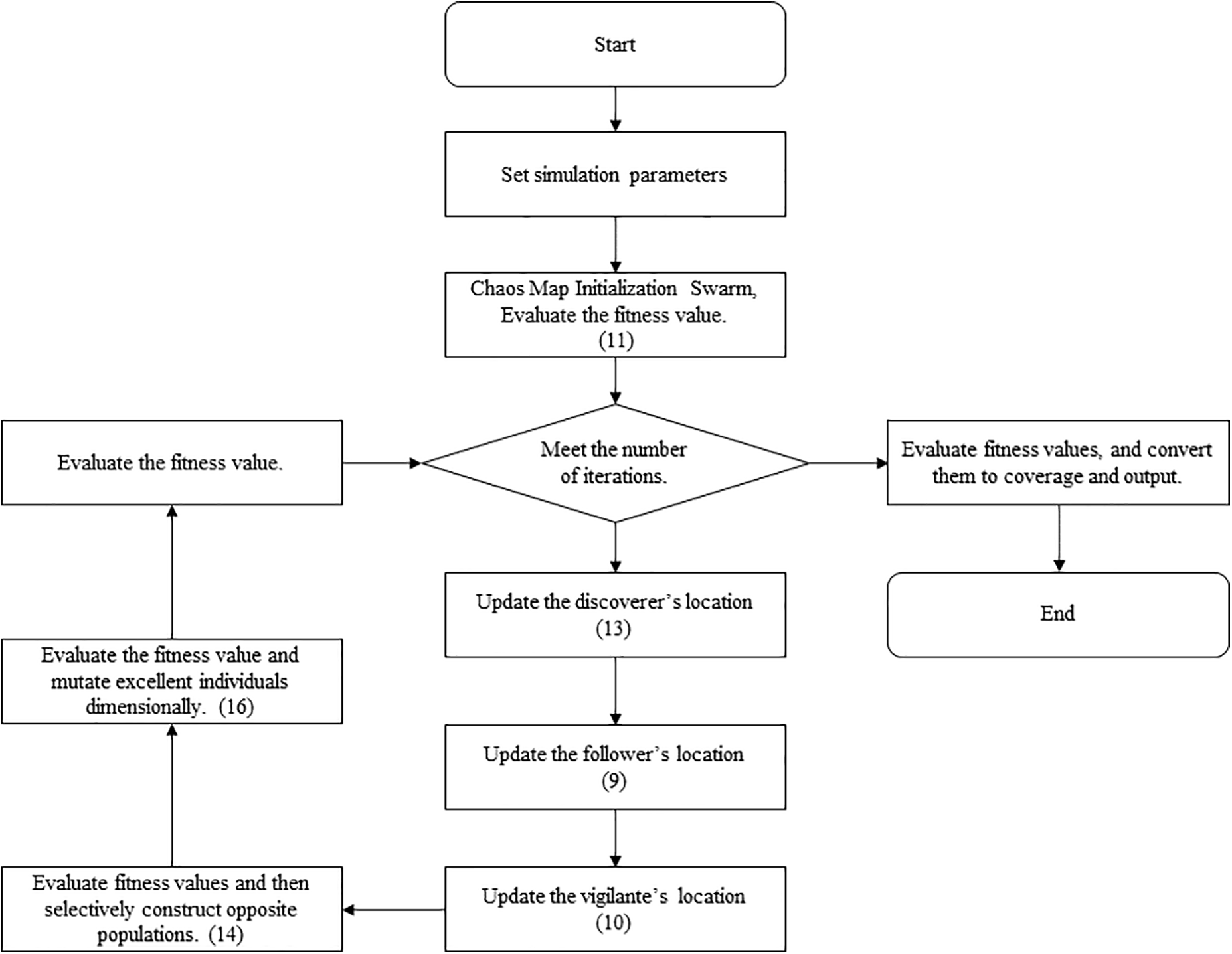
Figure 3: Implementation process of MFSSA
This paper selects several commonly used swarm intelligence algorithms to compare with the proposed multi-fusion swarm intelligence algorithm and verify its algorithmic model properties. Different algorithms generate and solve a set of coverage target points separately. The coverage and convergence metrics of each algorithm are calculated. This paper conducts 100 experimental simulations under the same environmental conditions to ensure accuracy. The resulting practical data sets are sorted, and each group’s top and bottom 5% are excluded.
This paper compares the multi-fusion swarm intelligence optimization algorithm proposed in this study with three other algorithms: the basic SSA algorithm, ISSA [15], and RWSSA [16]. The ISSA is a multi-strategy improvement algorithm, while the RWSSA is a single-strategy improvement algorithm. The MSSA is a multi-strategy improved algorithm that utilizes the t distribution rule. The experimental parameters are set as Table 1.
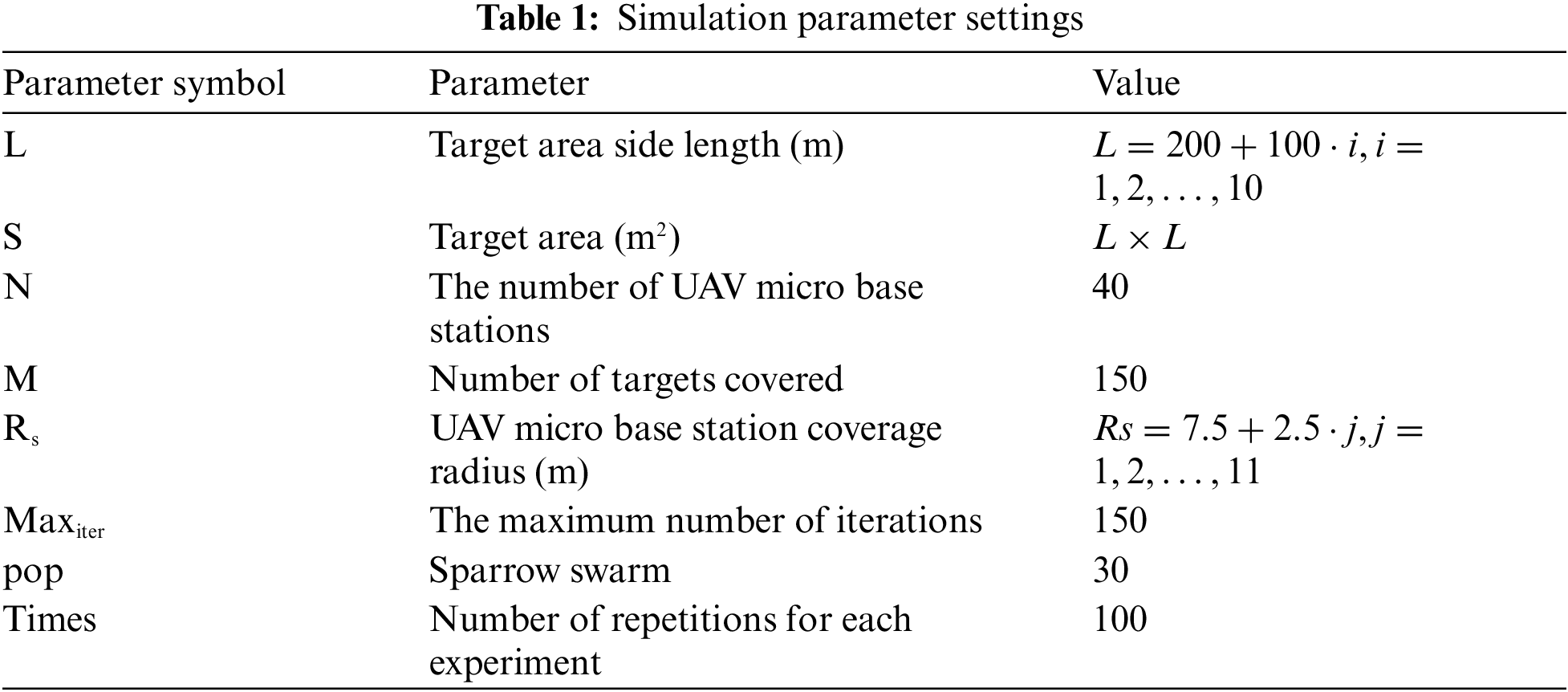
Based on the experimental simulation results, this paper analyzes the coverage optimization effects of different algorithms in two dimensions: the target area’s size and the signal coverage radius, as the perceived radius of the base stations is not uniform across the target area.
4.1 Base Station Deployment Effect Analysis
To visualize the performance of the MFSSA for base station coverage optimization, base station signal coverage radiuses of 10.0, 17.5, 27.5, and 32.5 m are selected for a coverage area with a side length of 400 m. The deployment effects of the five algorithms are visualized in the four cases mentioned above. The coverage targets’ distribution locations in Fig. 4 are randomly generated. The base station deployment diagrams in Fig. 4 correspond to the four coverage target distributions. By comparing each algorithm’s optimized BTS deployment results, it is evident that the SSA has more overlapping signal coverage among BTSs, resulting in a smaller effective coverage area and a more significant signal coverage blind area. The RWSSA and ISSA result in a relatively more minor optimized signal coverage blind area. The MSSA has a more even deployment effect but has an excessive number of base stations in a particular range, leading to high energy loss during subsequent redeployment. The BTS deployment scheme of the MFSSA is more uniform, resulting in a relatively larger effective signal coverage area and smaller signal coverage blind spot.
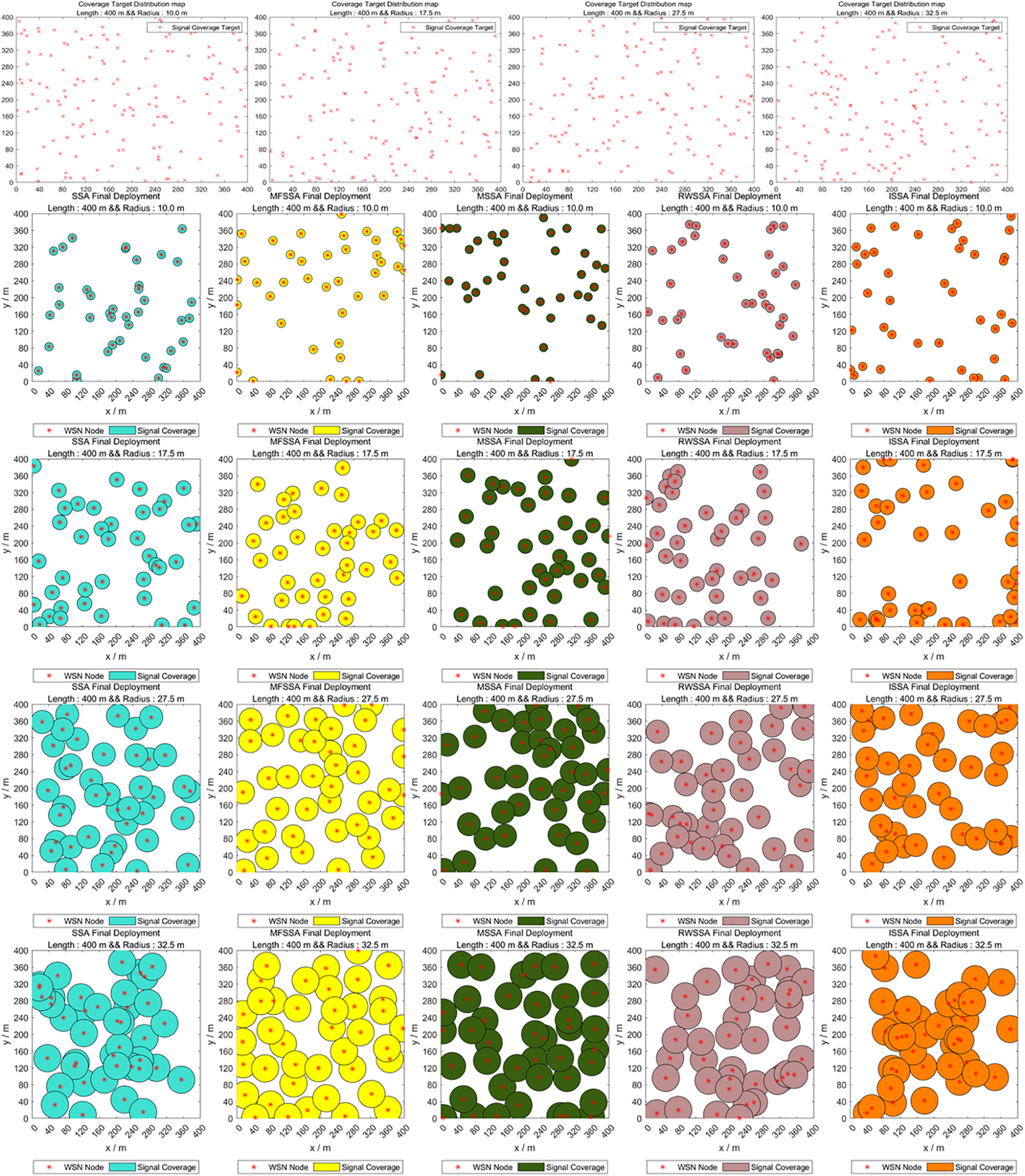
Figure 4: The complexity analysis of base station deployment effect
Fig. 5 shows that as the base station is elevated to a certain height and has the corresponding signal coverage of 12.5, 17.5, 25.0, and 32.5 m, the coverage target range gradually increases from 300 to1200 m. As the experiment scale expands and the algorithm-seeking difficulty rises, the changing trend of the relationship curve corresponding to the MFSSA is smoother than that of the other algorithms. Furthermore, the error of the MFSSA is more stable, and its positive and negative error range is mainly maintained at 0.5% to 3.5%. When comparing the average coverage effect on other occasions, the intermediate coverage level of the MFSSA is significantly higher than that of other algorithms. These findings suggest that the MFSSA is more stable and has better search capabilities than the different algorithms when the target range in which the coverage target is located changes. Moreover, it is more suitable for application in scenarios where the base station moves in a more extensive range in the horizontal direction.
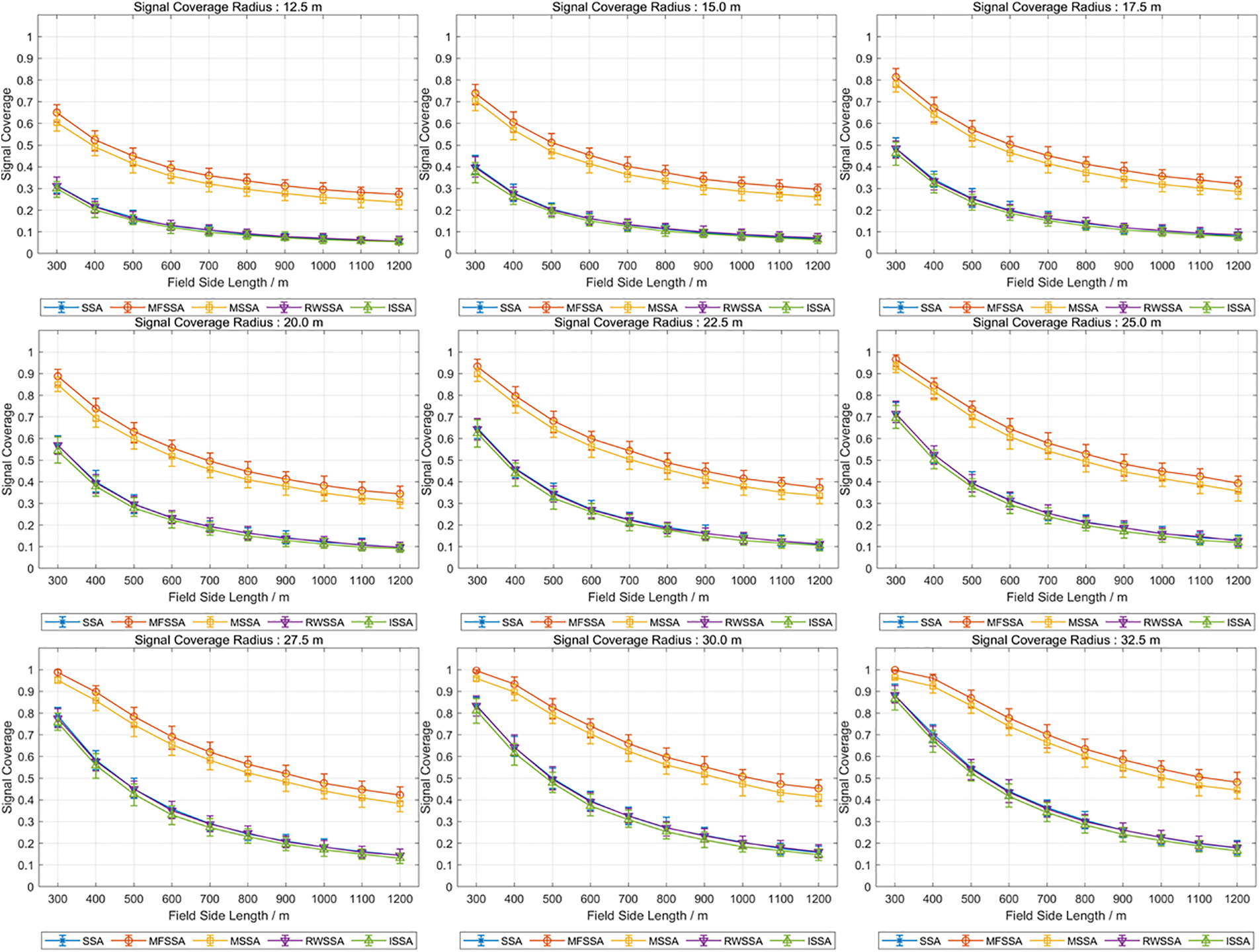
Figure 5: The complexity analysis of partitioning schemes
4.3 Signal Coverage Radius Change
From Fig. 6, it is evident that the MFSSA’s coverage minimum values at corresponding locations are higher than the maximum values of other improved strategies by 10% to 30% when signal coverage radius changes due to varying heights in target scenes with site side lengths of 400, 700, and 1100 m. Moreover, considering the average coverage effect in other settings for side-by-side comparison, the MFSSA outperforms the different compared algorithms concerning coverage rate. While the signal radius of the base station decreases with the expansion of the experimental scale, making the conditions harsher, the difficulty of solving the algorithm increases. However, the MFSSA’s error remains stable with an error range of 1% to 3% and significantly higher than the other algorithms on average. When the base station is located at different heights, causing signal coverage changes, the MFSSA is less affected than the other improved strategy algorithms, with higher solution stability and quality. Thus, the MFSSA is more suitable for scenarios where the base station moves vertically over a broad range.
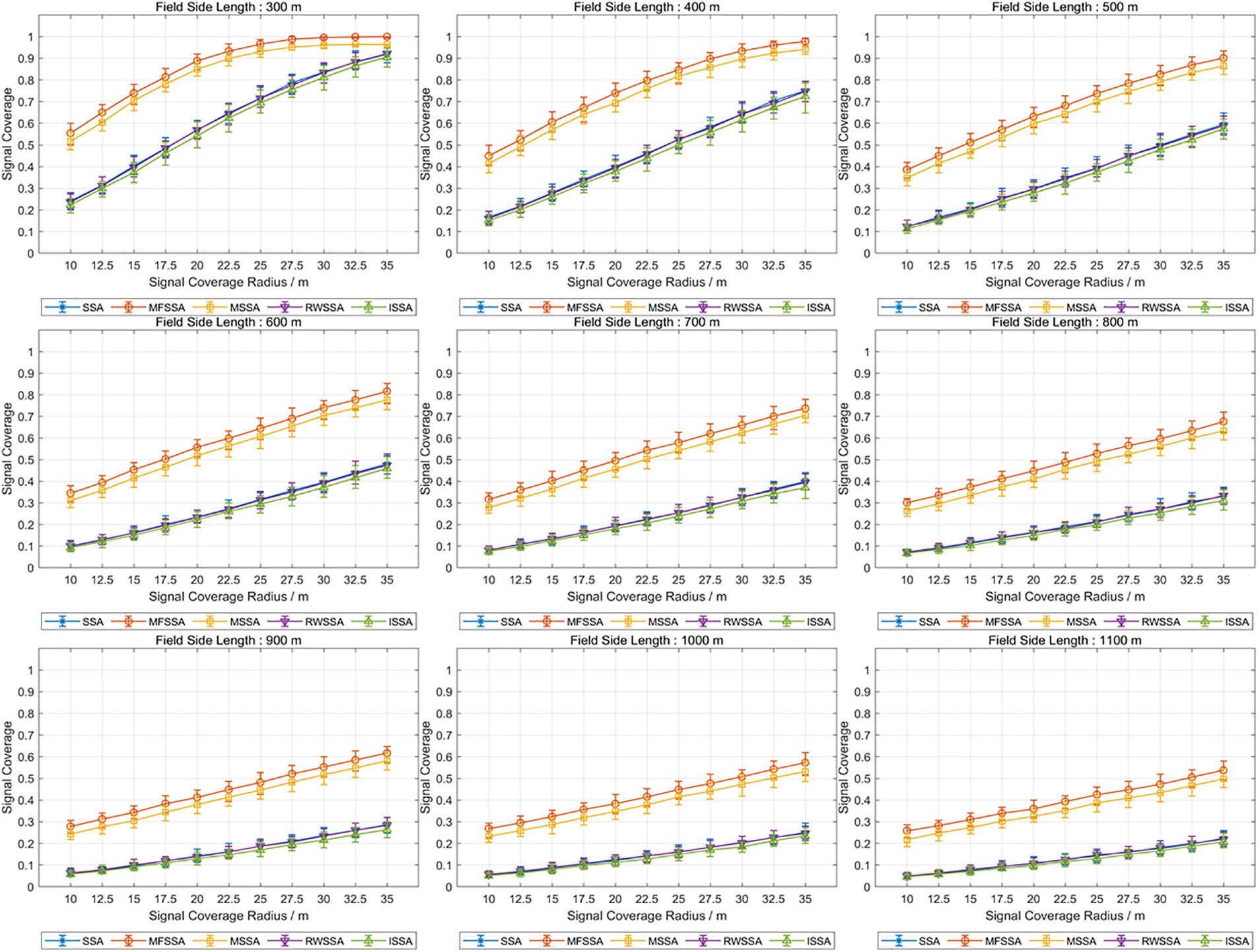
Figure 6: The complexity analysis of partitioning schemes
4.4 Comparative Analysis of Algorithm Convergence
Fig. 7 depicts iterative curves of various algorithms for coverage of discrete target sites under 12 different conditions. As the target site increases and the signal coverage radius of the base station decreases, the algorithm’s difficulty in finding the global optimal solution increases. Fig. 7 shows that the MFSSA algorithm exhibits superior convergence compared to the other algorithms, with a convergence rate of 70% to 75% of its maximum coverage after ten iterations and reaching its limit from 50 to 70 iterations. Conversely, other algorithms have little coverage change during the early stages of the iterative process, and the curve changes are relatively flat, with only a marginal coverage increase in subsequent iterations. As environmental conditions become more demanding, the number of iterations required for the MFSSA algorithm to reach its limit increases, with a maximum coverage 20% higher than the ISSA, RWSSA, and SSA algorithms. Thus, the MFSSA algorithm exhibits higher finding accuracy than other algorithms. Compared to the MFSSA algorithm, different algorithms are more likely to enter the premature state and fall into the local optimum.
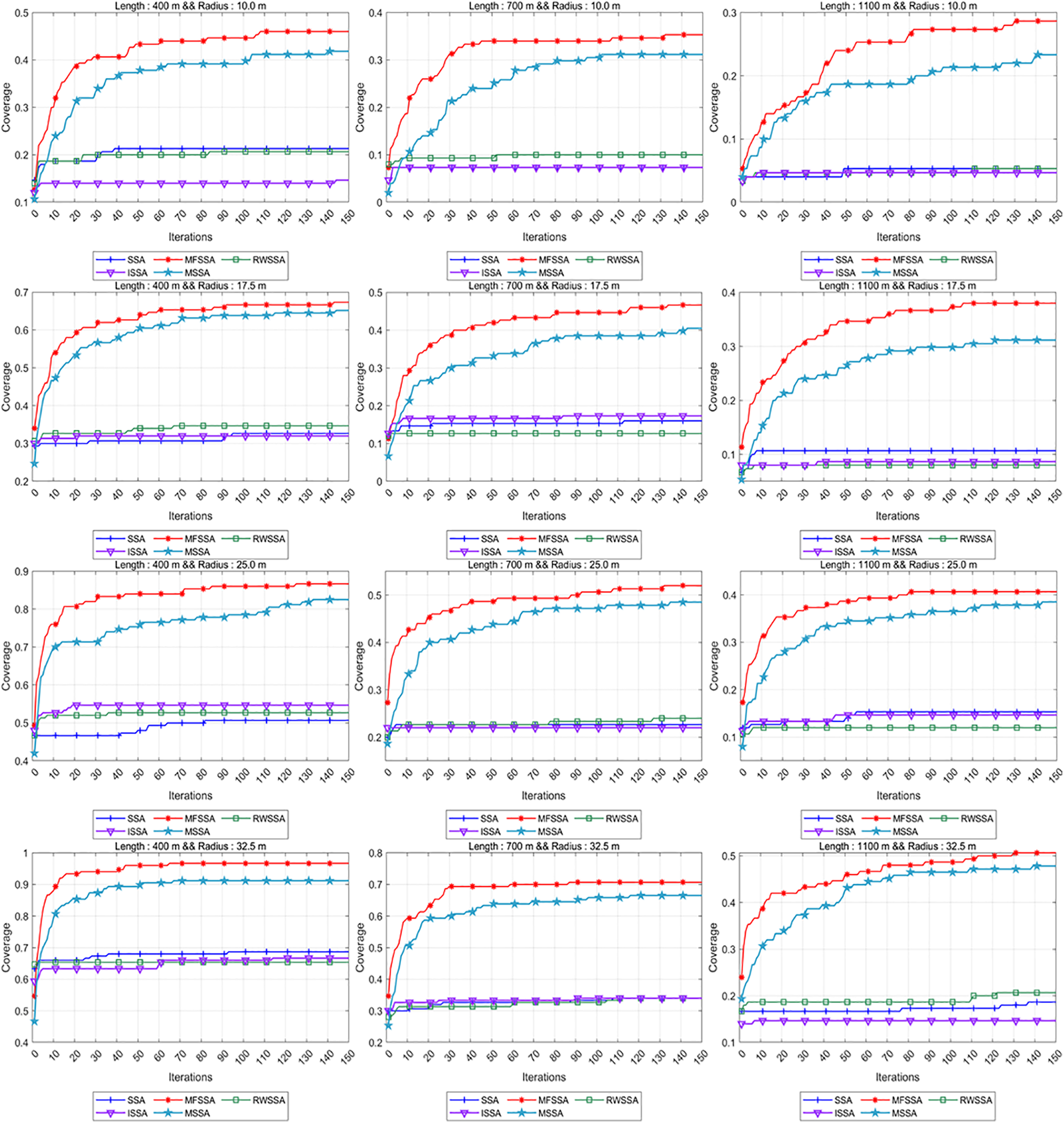
Figure 7: The complexity analysis of algorithm convergence
The MFSSA’s iterative curve remains consistent as the target site and signal coverage radius conditions become stricter. Furthermore, its convergence is more stable than that of other algorithms. However, the algorithm’s growth trend will gradually decrease for sites with an edge length of1100 m and a base station coverage radius of 10.0 m. Although the curve gradually levels off at the early iteration stage, its optimization-seeking accuracy is still superior to other algorithms. In contrast, the convergence stability of the MSSA, SSA, and ISSA is inferior to that of MFSSA. Additionally, these algorithms are more susceptible to location and target conditions, resulting in poorer stability.
The MFSSA’s superior searchability and pioneering ability are attributed to its dynamic adaptive weighting and elite opposition-based learning strategy. While the other algorithms struggle with more demanding conditions, resulting in low coverage and a smooth iteration curve, the MFSSA’ tendency to fall into a local optimum is mitigated by its t-distribution-based one-fifth rule. This feature enables the MFSSA algorithm to jump out of the local optimum effectively, and its better compression ability for the solution space makes it stand out from other algorithms.
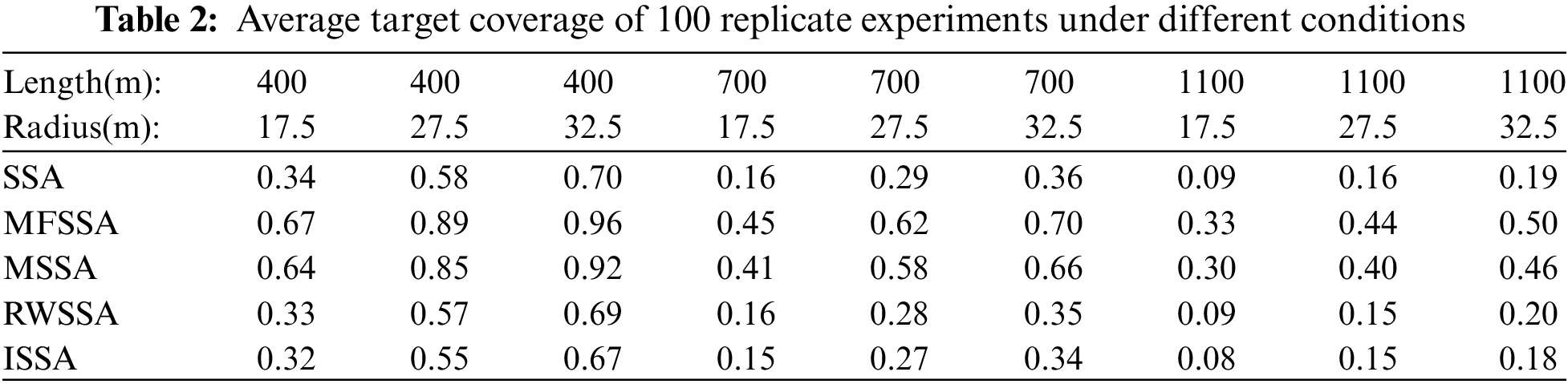
4.5 Base Station Average Coverage
Combined with Table 2, it can be seen intuitively that the coverage optimization efficiency of ISSA improved by using a common mutation strategy is weaker than that of original SSA and common improved RWSSA. On the contrary, the coverage optimization efficiency of MFSSA and MSSA based on the dynamic t-dimensional mutation strategy is much better than that of standard improved algorithms. The dynamic dimension-wise mutation strategy greatly optimizes the adaptability and searchability of the algorithm. By analyzing the performance of MFSSA and MSSA on different occasions, the refined search ability of MFSSA is more prominent than that of MSSA, resulting from the fusion of varying mutation strategies.
Many vital advances have emerged from high-level academic papers in the field of web services problems in IoT and research on swarm intelligence algorithms. These works are of great significance in guiding and helping multi-convergence swarm intelligence algorithms. Therefore, this paper has compiled some representative results.
5.1 Internet of Things Services
The IoT connects people, machines, and things profoundly and extensively. With the integration of new-generation information technology and the traditional manufacturing industry, IoT has widespread use in industrial manufacturing, energy interconnection, and intelligent medical applications [17]. As an essential technology supporting the vision of the industrial Internet, IoT has received significant attention from researchers for its security, stability, reliability, and intelligence. To improve network transmission efficiency, Song et al. [18] proposed an innovative, collaborative automation (SCA) scheme to enhance the resource utilization of network transmission in smart IoT and to increase its buffer limit. To ensure network security, Kim et al. [19] introduced the Mobile Terminal Switching (MoTH) security protocol to secure smart IoT incorporating 5G technologies in the wireless data backhaul. WSN technology, a crucial technology for IoT, has been extensively studied by many scholars to address the network service coverage problem of IoT, which is no longer limited to the static deployment problem of IoT base stations. Researchers worldwide have shown significant interest in real-time tracking of sensing devices with fast coverage of network services to exploit the flexible mobile characteristics of mobile sensors in IoT [20].
5.2 Swarm Intelligence Optimization Algorithm
Swarm intelligence optimization algorithms are well-suited for addressing the problem of base station coverage and sensor node deployment in the IoT due to their fast convergence and strong adaptability. However, the direct application of the genetic algorithm to sensor node coverage scenarios may not produce ideal optimization results, as the initial swarm’s parameters and quality heavily influence its effectiveness. Hanh et al. [21] proposed a metaheuristic algorithm based on the genetic algorithm to address this issue. Additionally, Famila et al. [22] proposed an artificial bee colony clustering algorithm incorporating GEM and Cauchy operator, which is fast in convergence but could be better in coverage quality for WSN coverage optimization problems. Due to their ease of implementation and fast convergence, particle swarm algorithms are widely used in WSN coverage quality optimization problems. Phoemphon et al. [23] introduced an improved particle swarm optimization algorithm with an embedded virtual force resampling strategy that has better optimization effects and is easier to implement than the genetic algorithm. Qi et al. [24] proposed a particle swarm algorithm based on fuzzy logic and an extreme value learning machine, which exhibits more robust global search capabilities than the basic particle swarm algorithm but has limited local search ability in the late iteration. To optimize the gray wolf algorithm, Zhang et al. [25] proposed an optimization method based on simulated annealing, which has faster optimization and higher network coverage than the basic gray wolf algorithm but is prone to get trapped in local optima. Wang et al. [26] proposed a gray wolf algorithm with multiple fusion strategies with good coverage, excellent global solving ability, and fast convergence. Kotary et al. [27] proposed a multi-objective whale optimization algorithm with robust distributed clustering, which can result in a more uniform distribution of nodes. Nematzadeh et al. [28] proposed an efficient metaheuristic-based method for environment-aware node deployment, which can Maximize coverage and maintain connectivity in WSN and decentralized IoT. Ali et al. [29] proposed a max–min ant colony optimization algorithm for path planning of multiple UAVs. Rauf et al. [30] proposed a multi-population-based chaotic differential evolution algorithm for multi-modal and multi-objective optimization problems.
This paper proposes the MFSSA to maximize the coverage of discrete coverage targets and achieve rapid convergence of base stations. The algorithm is based on the SSA and incorporates several improvements to enhance its performance. Specifically, the sine chaotic map enriches the initial swarm diversity. Dynamic adaptive weighting is added to the discoverer position update strategy to improve the global search capability and accelerate the convergence speed. The elite opposition-based learning strategy is introduced to expand the search range of the algorithm and prevent it from getting trapped in a “premature” state. Finally, the optimal global solution of the current iteration is subjected to a t-distribution-based one-fifth rule to improve the pioneering ability of the algorithm and reduce the probability of falling into a local optimum. Simulation experimental results demonstrate that the MFSSA outperforms other algorithms regarding strong search capability, fast convergence, and good stability. It can effectively optimize the rapid deployment of base stations and reduce the redundant coverage problem. Future work will consider specific physical scenarios, optimal coverage paths, and the algorithm’s solving capability in complex systems.
Acknowledgement: The authors wish to express their gratitude to the School of Petroleum at China University of Petroleum-Beijing in Karamay for their generous support in conducting this research.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. N. Hussain and N. Kim, “Integrated microwave and mm-wave mimo antenna module with 360° pattern diversity for 5G Internet of Things,” IEEE Internet of Things Journal, vol. 9, no. 24, pp. 24777–24789, 2022. [Google Scholar]
2. F. Song, Y. Ma, I. You and H. Zhang, “Smart collaborative evolvement for virtual group creation in customized industrial IoT,” IEEE Transactions on Network Science and Engineering, pp. 1–11, 2022. https://doi.org/10.1109/TNSE.2022.3203790 [Google Scholar] [CrossRef]
3. Y. Siriwardhana, P. Porambage, M. Liyanage and M. Ylianttila, “A survey on mobile augmented reality with 5g mobile edge computing: Architectures, applications, and technical aspects,” IEEE Communications Surveys & Tutorials, vol. 23, no. 2, pp. 1160–1192, 2021. [Google Scholar]
4. G. N. Zhou, B. H. Sun, Q. Y. Liang, S. T. Wu, Y. H. Yang et al., “Triband dual-polarized shared-aperture antenna for 2g/3g/4g/5g base station applications,” IEEE Transactions on Antennas and Propagation, vol. 69, no. 1, pp. 97–108, 2020. [Google Scholar]
5. N. Aljeri and A. Boukerche, “Mobility management in 5g-enabled vehicular networks: Models, protocols, and classification,” ACM Computing Surveys (CSUR), vol. 53, no. 5, pp. 1–35, 2020. [Google Scholar]
6. F. Song, Z. Ai, H. Zhang, I. You and S. Li, “Smart collaborative balancing for dependable network components in cyber-physical systems,” IEEE Transactions on Industrial Informatics, vol. 17, no. 10, pp. 6916–6924, 2021. [Google Scholar]
7. Y. Ding, H. Duan, M. Xie, R. Mao, J. Wang et al., “Carbon emissions and mitigation potentials of 5g base station in China,” Resources Conservation and Recycling, vol. 182, pp. 106339, 2022. [Google Scholar]
8. N. Parvaresh, M. Kulhandjian, H. Kulhandjian, C. D’Amours and B. Kantarci, “A tutorial on ai-powered 3d deployment of drone base stations: State of the art, applications and challenges,” Vehicular Communications, vol. 66, no. 6, pp. 100474, 2022. [Google Scholar]
9. S. H. Huang, Y. H. Huang, C. A. Blazquez and C. Y. Chen, “Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm,” Advanced Engineering Informatics, vol. 51, no. 6, pp. 101536, 2022. [Google Scholar]
10. F. Song, Y. T. Zhou, Y. Wang, T. M. Zhao, I. You et al., “Smart collaborative distribution for privacy enhancement in moving target defense,” Information Sciences, vol. 479, pp. 593–606, 2019. [Google Scholar]
11. M. Tubishat, S. Ja’afar, N. Idris, M. A. Al-Betar, M. Alswaitti et al., “Improved sine cosine algorithm with simulated annealing and singer chaotic map for hadith classification,” Neural Computing and Applications, vol. 34, no. 2, pp. 1385–1406, 2022. [Google Scholar]
12. A. G. Hussien and M. Amin, “A self-adaptive harris hawks optimization algorithm with opposition-based learning and chaotic local search strategy for global optimization and feature selection,” International Journal of Machine Learning and Cybernetics, vol. 13, no. 2, pp. 309–336, 2022. [Google Scholar]
13. N. Khanduja and B. Bhushan, “Chaotic state of matter search with elite opposition based learning: A new hybrid metaheuristic algorithm,” Optimal Control Applications and Methods, vol. 44, no. 2, pp. 533–548, 2023. [Google Scholar]
14. Q. Zhang, H. Chen, A. A. Heidari, X. Zhao, Y. Xu et al., “Chaos-induced and mutation-driven schemes boosting salp chains-inspired optimizers,” IEEE Access, vol. 7, pp. 31243–31261, 2019. [Google Scholar]
15. Q. H. Mao and Q. Zhang, “Improved sparrow algorithm combining cauchy mutation and opposition-based learning,” Journal of Frontiers of Computer Science and Technology, vol. 15, no. 16, pp. 1155–1164, 2021. [Google Scholar]
16. Z. Chang, Q. Gu, C. Lu, Y. Zhang, S. Ruan et al., “5G private network deployment optimization based on RWSSA in open-pit mine,” IEEE Transactions on Industrial Informatics, vol. 18, no. 8, pp. 5466–5476, 2021. [Google Scholar]
17. Z. Lv, L. Qiao and I. You, “6g-enabled network in box for internet of connected vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 8, pp. 5275–5282, 2020. [Google Scholar]
18. F. Song, M. Zhu, Y. Zhou, I. You and H. Zhang, “Smart collaborative tracking for ubiquitous power iot in edge-cloud interplay domain,” IEEE Internet of Things Journal, vol. 7, no. 7, pp. 6046–6055, 2020. [Google Scholar]
19. J. Kim, P. V. Astillo, V. Sharma, N. Guizani and I. You, “Moth: Mobile terminal handover security protocol for hub switching based on 5g and beyond (5gb) P2mp backhaul environment,” IEEE Internet of Things Journal, vol. 9, no. 16, pp. 14667–14684, 2021. [Google Scholar]
20. F. Song, Z. Ai, Y. Zhou, I. You, K. K. R. Choo et al., “Smart collaborative automation for receive buffer control in multipath industrial networks,” IEEE Transactions on Industrial Informatics, vol. 16, no. 2, pp. 1385–1394, 2020. [Google Scholar]
21. N. T. Hanh, H. T. T. Binh, N. X. Hoai and M. S. Palaniswami, “An efficient genetic algorithm for maximizing area coverage in wireless sensor networks,” Information Sciences, vol. 488, no. 6, pp. 58–75, 2019. [Google Scholar]
22. S. Famila, A. Jawahar, A. Sariga and K. Shankar, “Improved artificial bee colony optimization based clustering algorithm for smart sensor environments,” Peer-to-Peer Networking and Applications, vol. 13, no. 4, pp. 1071–1079, 2020. [Google Scholar]
23. S. Phoemphon, C. So-In and D. T. Niyato, “A hybrid model using fuzzy logic and an extreme learning machine with vector particle swarm optimization for wireless sensor network localization,” Applied Soft Computing, vol. 65, pp. 101–120, 2018. [Google Scholar]
24. X. Qi, Z. Li, C. Chen and L. Liu, “A wireless sensor node deployment scheme based on embedded virtual force resampling particle swarm optimization algorithm,” Applied Intelligence, vol. 52, no. 7, pp. 7420–7441, 2022. [Google Scholar]
25. Y. Zhang, L. Cao, Y. Yue, Y. Cai and B. Hang, “A novel coverage optimization strategy based on grey wolf algorithm optimized by simulated annealing for wireless sensor networks,” Computational Intelligence and Neuroscience, vol. 2021, no. 1, pp. 1–14, 2021. [Google Scholar]
26. Z. Wang, H. Xie, Z. Hu, D. Li, J. Wang et al., “Node coverage optimization algorithm for wireless sensor networks based on improved grey wolf optimizer,” Journal of Algorithms & Computational Technology, vol. 13, pp. 1–15, 2019. [Google Scholar]
27. D. K. Kotary, S. J. Nanda and R. Gupta, “A many-objective whale optimization algorithm to perform robust distributed clustering in wireless sensor network,” Applied Soft Computing, vol. 110, no. 12, pp. 107650, 2021. [Google Scholar]
28. S. Nematzadeh, M. Torkamanian-Afshar, A. Seyyedabbasi and F. Kiani, “Maximizing coverage and maintaining connectivity in WSN and decentralized IoT: An efficient metaheuristic-based method for environment-aware node deployment,” Neural Computing and Applications, vol. 35, no. 1, pp. 611–641, 2021. [Google Scholar]
29. Z. A. Ali, H. Zhangang and W. B. Hang, “Cooperative path planning of multiple uavs by using max-min ant colony optimization along with cauchy mutant operator,” Fluctuation and Noise Letters, vol. 20, no. 1, pp. 2150002, 2021. [Google Scholar]
30. H. T. Rauf, J. Gao, A. Almadhor, A. Haider, Y. D. Zhang et al., “Multi population-based chaotic differential evolution for multi-modal and multi-objective optimization problems,” Applied Soft Computing, vol. 132, no. 1, pp. 109909, 2023. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools