
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

A New System for Road Traffic Optimisation Using the Virtual Traffic Light Technology
Faculty of Science and Information Technology, Al-Zaytoonah University of Jordan, Amman, 11733, Jordan
* Corresponding Author: Ahmad A. A. Alkhatib. Email:
Computer Systems Science and Engineering 2023, 47(1), 637-656. https://doi.org/10.32604/csse.2023.037345
Received 31 October 2022; Accepted 09 February 2023; Issue published 26 May 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Large cities suffer from traffic congestion, particularly at intersections, due to a large number of vehicles, which leads to the loss of time by increasing carbon emissions, including fuel consumption. Therefore, the need for optimising the flow of vehicles at different intersections and reducing the waiting time is a critical challenge. Conventional traffic lights have been used to control traffic flow at different intersections and have been improved to become more efficient by using different algorithms, sensors and cameras. However, they also face some challenges, such as high-cost installation, operation, and maintenance issues. This paper develops a new system based on the Virtual Traffic Light (VTL) technology to improve traffic flow at different intersections and reduce the encountered loss of time and vehicles’ travel time. Additionally, it reduces the costs of installation, maintenance and operation over various conventional traffic light systems. Consequently, the system proposes algorithms for traffic scheduling and lane identification by using vehicle ID, priority and time of arrival. To evaluate the system, four scenarios were presented where each scenario uses a different number of vehicles consisting of three types (emergency vehicles, public buses and private vehicles), each given a different priority. The proposed system is evaluated by integrating two simulators, namely, (OMNeT++) and (SUMO), and two frameworks, namely, (VEINS) and (INET) to prepare an appropriate working environment. the results prove that an improvement in the average travel time for several vehicles reaches 44.43%–49.76% compared with conventional traffic lights. Further, it is proven from the obtained results that the average waiting time for emergency vehicles is enhanced by 96.63%–97.63%, while the average waiting time for public buses is improved by 94.81%–97.23%. On the other hand, the waiting time for private vehicles ‘improved by 87.14% to 89.71%’.Keywords
Traffic congestion and waiting times are important issues in big cities. Therefore, creating new infrastructures, such as bridges, tunnels or traffic lights at intersections, is necessary for adequate transportation, which aims to reduce traffic congestion, vehicle travel time, and carbon dioxide emissions. However, bridges and tunnels are not always the most effective solution due to the high construction, maintenance costs and lack of space [1]. Therefore, researchers have developed conventional traffic lights to become more innovative and more flexible by using several algorithms such as Genetic Algorithms [2–4], Neural Networks [5] and Fuzzy Logic [6], and by using other sensors [7,8] and other devices [9] to help the control unit to produce appropriate decisions based on the current conditions of the road [10].
Researchers are currently leading smart cities, the Internet of Things (IoT), and Vehicle-to-everything (V2X) to develop traffic lights and use VTLs. The VTL smart city was primarily established in 2010. They aim to solve traffic congestion by using different communication models that can be divided into four main parts, which comprise: Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), Vehicle-to-Network (V2N) and Vehicle-to-Pedestrian (V2P) [11]. The VTL is a cheap promising solution for cities’ traffic jams as a replacement for expansions of bridges, tunnels and roads.
The rest of this paper is organized as follows: Section 2 provides the related research. InSection 3, the proposed system is described, and a clear idea of the system is introduced. The experimental results and evaluation are shown in Section 4. Finally, Section 5 concludes the paper, followed by the list of references.
Previous studies have sought to enhance traffic management at different intersections. A virtual traffic-light management framework, presented by Ferreira et al. [12], does not need any roadside infrastructure to optimize the traffic, which dynamically flows at road intersections. Standard ITS Dedicated Short-Range Communication (DSRC) is used by vehicles to choose a leader vehicle at the intersection of functions such as a coordinator, after which it transmits virtual traffic light messages to all vehicles within the range. In-vehicle displays show these instructions to drivers. It is demonstrated by simulation findings that the proposed system enhances traffic efficiency. It is suggested by Conceicao et al. [13] that the DSRC and Virtual Traffic Lights (VTL)-equipped vehicles should be equipped with an exterior representation as visible light of their VTL regulations, such as stop or cross. This improves the way legacy car drivers behaving at the final stage. The efficiency increases when simulations are used through traffic simulators and the network simulator NS3, where the trip duration times of equipped vehicles are shorter.
Gama et al. [14] implement and evaluate a VTLS system designed to assist pedestrians in crossing intersections safely without conventional traffic lights since pedestrians are more vulnerable to accidents than other road users. In 2016, the statistics of the European Union showed that 21% of deaths were caused by traffic accidents caused by pedestrians. The role of traffic lights is therefore needed to improve the safety of Vulnerable Road Users (VRUs) since red lights stop cars at intersections, which enables VRUs to cross safely.
The simulated VTLS scenario uses two distinct contact models-push and pull contact models. The pull model is implemented by using Named Data Networking (NDN), that is, a networking architecture that completely redesigns the Internet by using content fragments as a universal component of transmission rather than the Internet Protocol (IP) datagrams since neither IP addresses nor port numbers are used in NDN packets.
Wynn et al. [15] propose an algorithm using the VTL and define it as an automated traffic control system without the need for road infrastructure. The proposed algorithm allows the most significant number of vehicles to cross the intersection without collisions as the destination of the vehicles approaching the intersection is taken into account.
Wynn et al. hypothesize that all Smart Vehicles (SVs) are equipped with technology-based Dedicated Short-Range Communication (DSRC), technology-dependent (IEEE802.11p), including the Global Positioning System (GPS) where the VS sends its location information to its neighbouring vehicles when using the DSRC.
Martins et al. [16] propose a model for improving traffic management between vehicles and pedestrians based on the V2I technology to allow pedestrians to cross an intersection safely by linking vehicles approaching an intersection with a pedestrian mobile to exchange warning messages with each other. Fig. 1 shows an overview of connecting vehicles and pedestrians to the centralised controller.
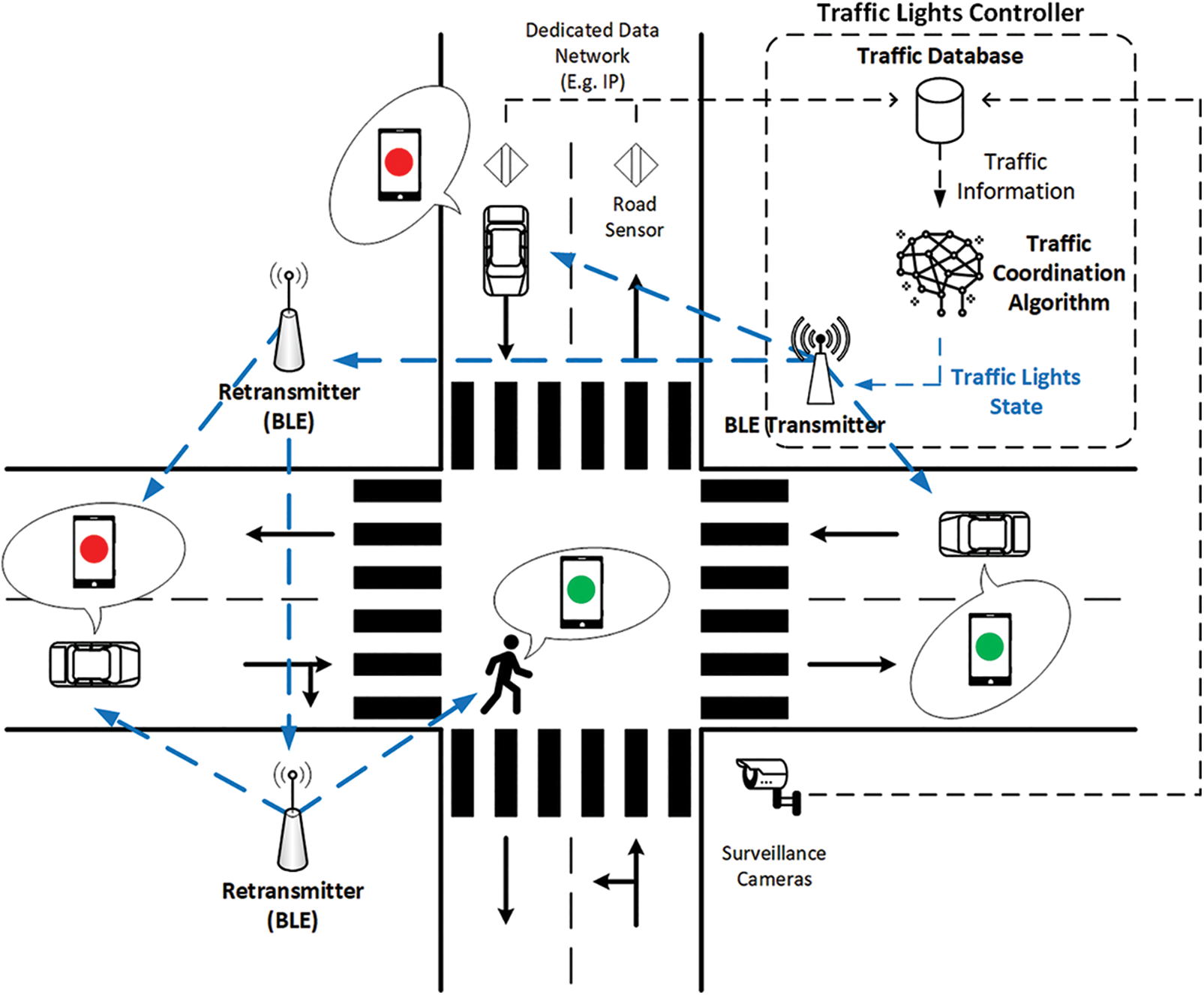
Figure 1: An overview of connecting vehicles and pedestrians to the centralized controller [16]
Bluetooth Low Energy (BLT) technology is used to link vehicles and mobile devices with a centralized controller where traffic signals are displayed on mobile devices through an application that is deployed on smart devices.
The centralised controller keeps the information about the traffic light system status. The entire state of the lighting system and the time until the next phase transition are stored with other sources of information, such as road sensors, radars, cameras, etc., that can be attached to the controller. These inputs can provide more precise and dynamic control over smart intersections, pedestrian crossings or roundabouts. However, the scenario is restricted to a static scheme with pre-established phase sequences.
Al-Qutwani et al. [17] use a different performance style in the network architecture as it is based on the name of the content to send and receive data, which is called the NDN, to implement it in the VANET. By using the proposed Roadside Unit (RSU) model, the RSU collects information about vehicles that are approaching the intersection. Following that, it processes this information based on many predefined priorities. Further, an instant message is sent with the necessary action (stopping, following up) for each vehicle.
The network, called VANET, is designated for vehicle communication, and it contains a variety of advanced technologies that are used in the model, such as short-range communications (DSRC), 3G, and 4G. They suggest that the IP address must function in a wired technology, which leads to some challenges when it is used in the VANET.
The system architecture consists of two types of contracts, which comprise:
1. The RSU that represents the source.
2. The vehicle that represents the consumer.
In the RSU, the system contains two main components: the NDN node and the Traffic Management Unit (TMU). The components that must be available in the vehicle include the NDN node and a signal unit (it is responsible for converting traffic information received by the RSU to light signals, including the vehicle information that is periodically sent to the RSU).
The mechanism of the proposed approach begins by receiving data from vehicles approaching the intersection to the RSU, where the RSU processes the data to determine the priority of vehicles crossing the intersection.
Vehicles send a message that contains their data continuously to the RSU, which functions every time to ensure that there is a pre-registration of the vehicle data in the CS. If the vehicle is not registered, its data is saved in the CS; otherwise, the message is ignored.
A VTL developed by Bazzi et al. [18] in which a distributed algorithm makes use of Vehicle-to-Vehicle (V2V) communications and which is founded on the Institute of Electrical and Electronics Engineers (IEEE) 802.11p wireless communications. These communications represent a protocol for the vehicle network by providing 10 MHz channels at a frequency rate of 5.9 gigahertz to transmit messages that inform the vehicles approaching targeted intersections about their priorities. The algorithm is evaluated under several laboratory conditions, including field trial settings. A decentralized algorithm is proposed, where vehicles themselves determine the priority of intersections without using the infrastructure.
Additionally, they use broadcast messages to share the location of information among vehicles and use unicast messages to receive vehicles’ priorities to stop or keep driving. Moreover, these messages ensure that the message reaches the receiving vehicles. Vehicles are provided with an On Board Unit (OBU) by having a unit that provides wireless communication among vehicles to set priorities; where these vehicles are called Smart Vehicles (SV).
A VTL model was established by Nakamurakate et al. [19] for Android-based smartphones to transmit traffic light information to their users. The basis of this model is a self-organized traffic control paradigm that identifies and solves conflicts at different intersections. Wi-Fi Direct ad-hoc communications are employed by vehicles to take part in the process of selecting a leader at intersections. The leader selects functions as a temporary traffic-light infrastructure and transmits traffic-light instructions to adjacent vehicles. The user afterwards views this information through the VTL application interface of the smartphone. A driving assisting mechanism, the basis of which was Infrastructure-to-Vehicle (I2V) communications, is presented by Isasi et al. [20] to obtain information on the speed and position of vehicles that are close to an intersection. The information is obtained by the infrastructure to the present status of traffic lighting signalization by employing Wi-Fi communications. The driver is informed by the system about the present status of the traffic light at the intersection by using an in-vehicle display. Additionally, it integrates the entire information that is obtained to predict the traffic-light status at a point drivers approach the intersection. There are a few studies in which technologies apart from standard ITS communication technologies are being applied. The use of ZigBee technologies for Vehicular-to-Infrastructure (V2I) communications is examined by Gheorghiu et al. [21]. Emergency vehicles are equipped with the system so that it is close to an intersection. The system interacts with the traffic light system allowimg an emergency vehicle to pass through. A laboratory testbed is used to validate this system. A similar system is put forward by Kodire [22] based on the use of ZigBee and V2I communications for allowing emergency vehicles to cross at intersections. To enhance its efficiency, the system also utilizes GPS information.
According to Gollapalli et al. [23], it is challenging to conduct modelling, simulation and evaluation of intelligent traffic congestion point forecasting in smart cities. Gollapalli et al. present a similar model to predict traffic congestion with greater precision. The congestion point at distinct junctions of the road is predicted by this cloud-based hybrid neuro-fuzzy empowered model. Enhancing the fuzzy membership functions and obtaining more precise estimations and reasonings, the neural network has been trained across the dataset examples. Unsimilar IoT sensors installed on the road in a smart city provide the inputs, and once they undergo the required pre-processing stage in the cloud server, they are included in the proposed system. It is found to be proven from the simulation findings that the proposed model exhibits an accuracy of 99.214% during the training stage and 98.728% during the validation stage.
The use of the Multi-Agent Deep Q-network (MADQN) model in traffic light controllers at different intersections is examined by Rasheed et al. [24]. Their model deals with two types of traffic congestion, which comprise: 1) Recurrent Congestion (RC) that occurs due to heavy traffic volume; and 2) Non-Recurrent Congestion (NRC) that occurs due to traffic disruptions, particularly under bad weather. In terms of the traffic light controller, the traffic phase split is regulated by the MADQN model, which is followed by the traffic demand to decrease the number of vehicles that are waiting in different lanes of an intersection. The model allows traffic light controllers to employ Deep Neural Networks (DNNs) to preserve and represent intricate and continuous states, exchange knowledge (or Q-values), and learn and attain optimal joint actions while also dealing with the issue of dimensionality in a multi-agent setting. Rasheed et al. focus on two vital features of their model, which include; the target network and experience replay, and which offer training with stability when multiple traffic light controllers are installed. The evaluation of their model occurs as part of a conventional Grid Traffic Network (GTN), and an entire traffic network can be formulated in Sunway city.
A V2V-based distributed solution, known as V3TL, is formulated by Rapelli et al. [25] to regulate uncontrolled intersections and to decrease the time taken to clear the intersection by decreasing the number of stop-and-go manoeuvres that raise emissions. The solution carries out cyclic scheduling of vehicles when they approach the intersection by allowing them to use V2V communication to collaborate.
There may not be roadside units installed at each intersection, mainly in rural areas, which increases the need for a self-coordination process among vehicles. Maslekar et al. [26] are the first researchers to discuss this issue. An adaptive traffic signal system is proposed in their study, which is based on car-to-car communication and the development of a Virtual Traffic Light (VTL) controller. The VTLs are beneficial over other intelligent systems because they save the costs of installing and maintaining permanent infrastructure. A leader is autonomously selected by the vehicles to manage traffic lights at the intersection. In [27], the coordinator election in a VTL is explained, while [18] puts forward an optimized distributed algorithm.
Issues are faced in using the VTL when the number of vehicles exceeds a specified threshold. A lack of scalability that is attained by the system includes two problems. The first problem implies that issues are faced in selecting the coordinator in VTLs by exhibiting weak performances, as elaborated in [28], and the second implies that the coordinator needs to perform all required computations to obtain the data by making a decision and transmitting the rest of the vehicles in the network.
Another issue emerges with the participation of vehicles in the decision process about the reliability of the data being shared. Competing vehicles may conspire to attain a more significant priority and time to pass through an intersection. However, the efficiency of the suggested intelligent controls in [26–29] is greater in decreasing vehicle delay times and enhancing the traffic flow in comparison to the prefixed controls and actuated systems where no consideration is given to the security issues inherited in the model. It is assumed by the previously mentioned intelligent traffic systems that the entirely accurate data provided by the participating vehicles, i.e., identity and location reports obtained from the vehicles, are reliable. Nonetheless, attempts can be made in reality by a malicious vehicle to cheat a traffic light control by transmitting a fake identity, for example, by pretending to be an emergency vehicle or several vehicles by repeating the messages of other vehicles to raise the green time assigned to the cheating vehicle’s road section. Hence, a vital element of executing an efficient and intelligent traffic light controller is acquiring a reliable and accurate mechanism of real-time information verification.
The proposed system consists of four steps. In the first step, each vehicle approaching the intersection generates its file, which contains its data and sends it to the Road Side Unit (RSU). In the second step, the RSU collects the data of vehicles and adds the arrival time and timer for each new vehicle. In the third step, the proposed system is applied to make appropriate decisions. In the fourth step, the RSU sends a message for the vehicle to convert the status of this vehicle from red to green. Fig. 2 shows the flowchart for the proposed system.
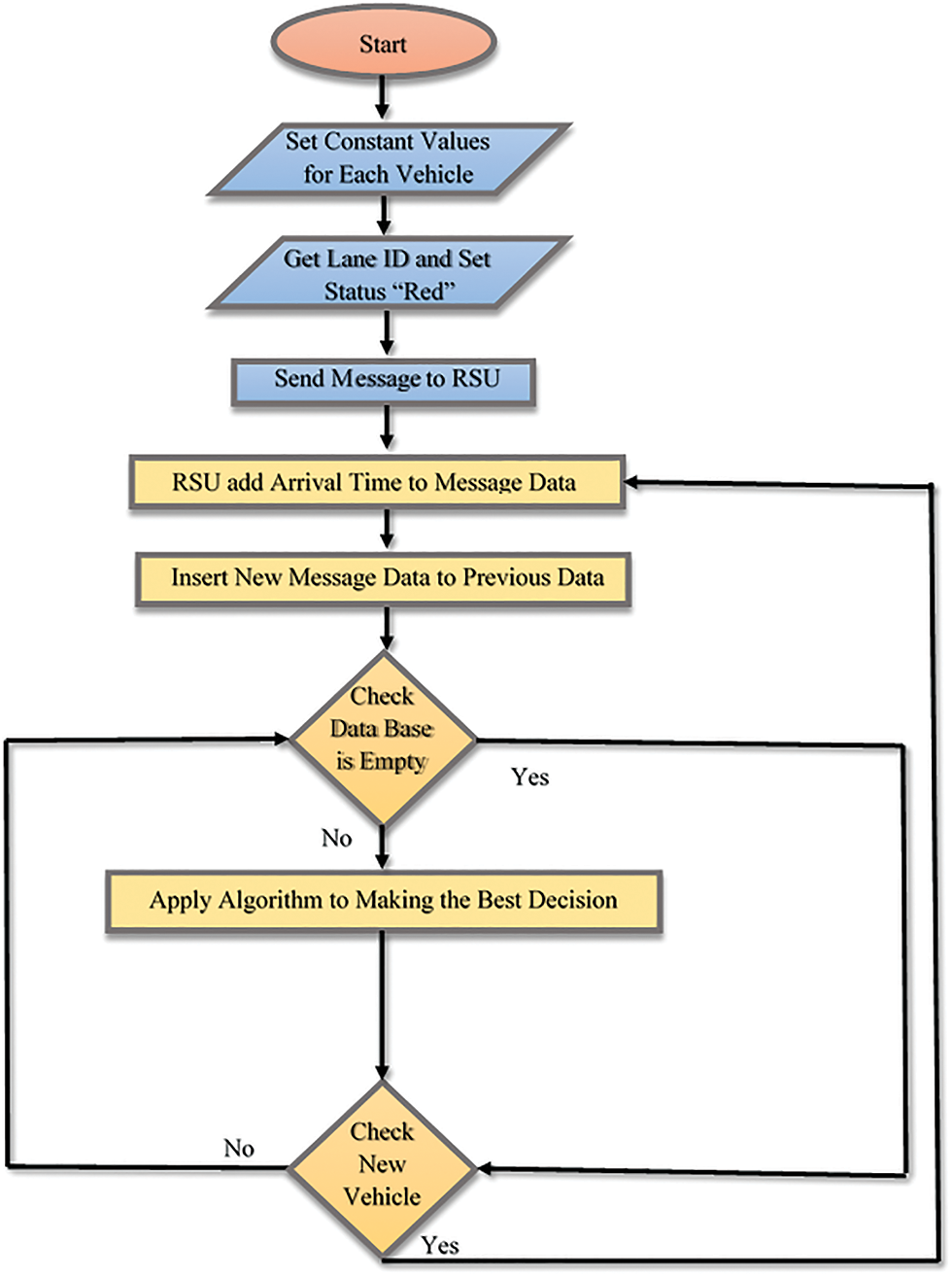
Figure 2: The proposed system
The proposed system starts when the roadside unit is ready to receive data from vehicles approaching the intersection. Each traffic intersection is provided with a roadside unit that collects and records vehicle data to analyze it and to make the appropriate decisions for the passage of the vehicle or stop when it reaches the intersection.
Each vehicle is provided with an OBU unit, which is a unit that has proven appropriate performance in being applied in the VT. The vehicle sends its data to the roadside unit when it approaches the intersection [30]. These sorts of data can be classified into two parts:
* Constant Value: The data cannot be modified when each vehicle is provided with a number in advance by the manufacturer. It contains the characteristics of the vehicle, namely:
1) Vehicle Identification Number (VIN)
The manufacturer must assign a unique Vehicle Identification Number (VIN) for every vehicle made after 1986. The VIN is an essential information key for vehicle data [31].
The VIN consists of 17 characters created by the manufacturer based on several sections, including the manufacturer, the model year of the vehicle, the serial number of the vehicle, etc. Fig. 3 illustrates the parts that create the VIN.
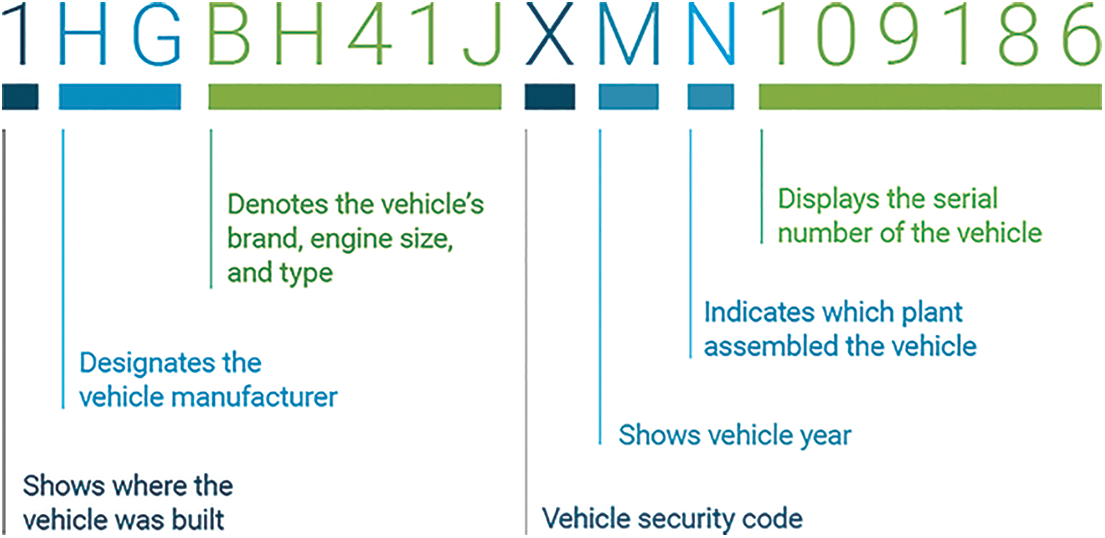
Figure 3: The creation of the VIN [32]
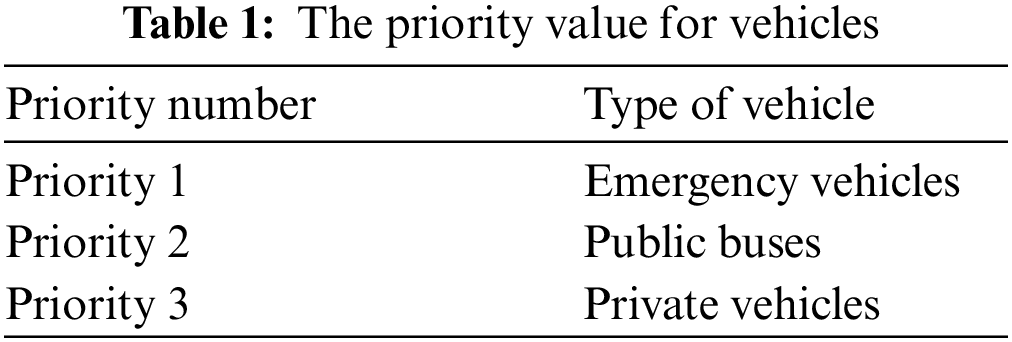
2) Priority Value
Priority values are introduced in the system to distinguish the types of vehicles. The priority value for each vehicle is presented in Table 1.
* Variable Value
This value represents the data for which its values are automatically adjusted as the vehicle approaches the intersection, namely:
1) Arrival Time
When the vehicle approaches the intersection, and after determining the Lane number it is travelling in, the vehicle sends its data to the roadside unit. After that, the roadside unit adds the vehicle arrival time to the database. The vehicle’s arrival time is used to determine the seniority of the vehicle’s arrival time and to allow it to pass first when the priorities are equal.
2) Lane ID
Vehicles approaching an intersection can obtain a lane ID from a pre-installed sensor on each lane of the road and have it programmed to provide its lane ID for each vehicle moving above. Hence, the destination of the vehicle is determined based on the Lane ID that the driver uses. Once the vehicle obtains its lane ID, it sends the data to the RSU, as each intersection is provided with one RSU. Fig. 4 depicts an example of a road numbering mechanism by giving each lane its ID.
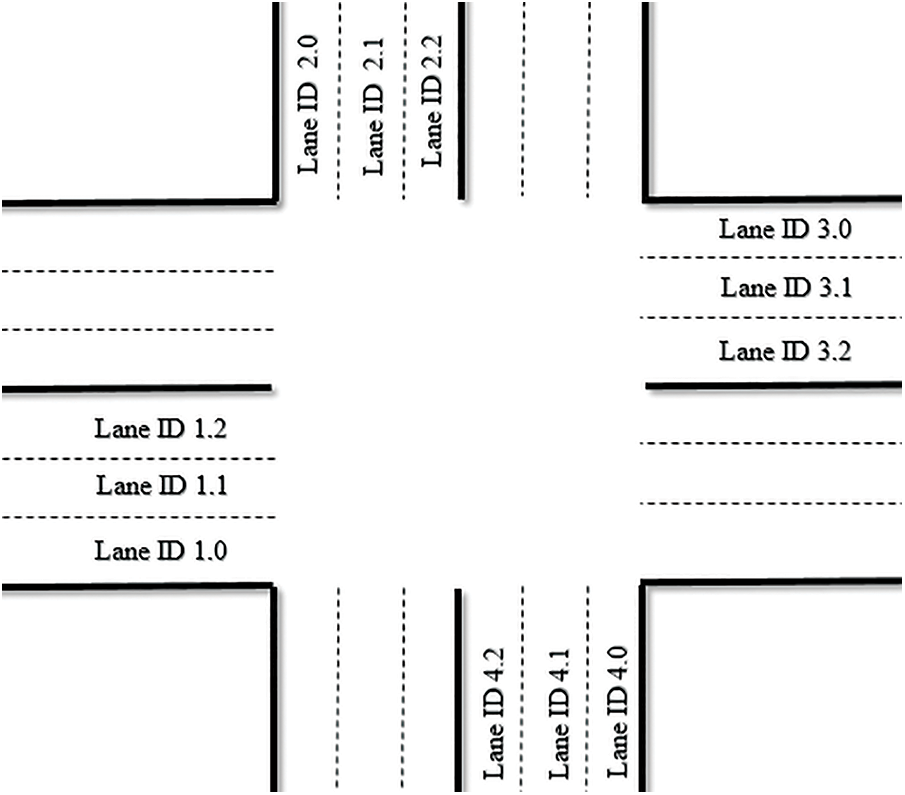
Figure 4: Numbering the Lane ID to an intersection
3) Status
When the vehicle receives its lane number from a sensor, it changes the status that is displayed inside the vehicle to a red light by default to ask the driver to stop until this driver receives a new message from the roadside unit to change the status to a green light. Table 2 shows the format of the message that is sent from the vehicle to the road unit.

When the roadside unit receives the message of the vehicle that is approaching the intersection, it adds the arrival time and a timer for each new vehicle data. Table 3 illustrates the format of the message that is sent from the vehicle along to the roadside unit after adding the arrival time and a timer.

3.2 Make an Appropriate Decision
When the roadside unit receives the data of a new vehicle that has arrived at the intersection, the roadside unit relies on the algorithm to make the appropriate decision. The following pseudocode represents the proposed system.
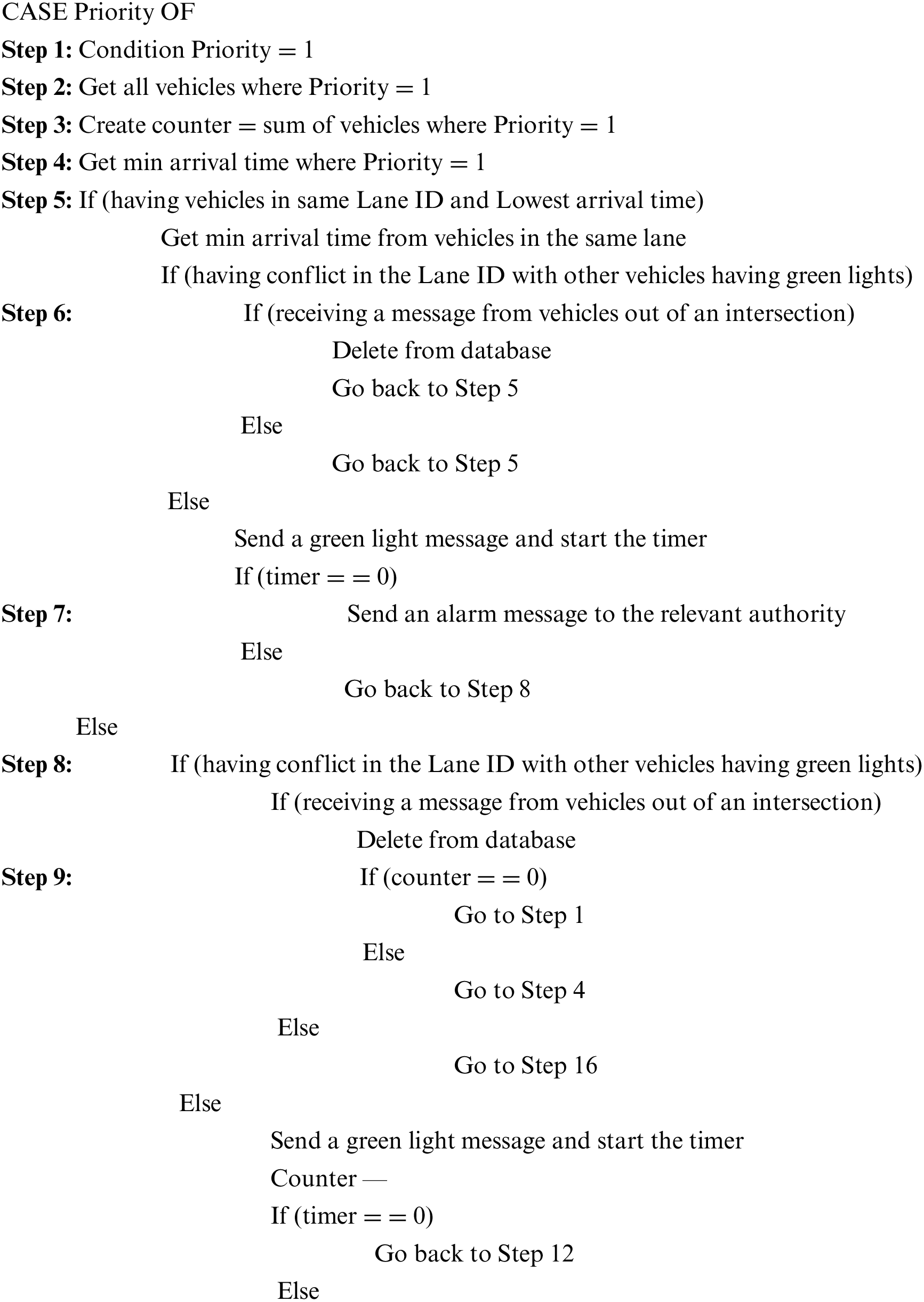
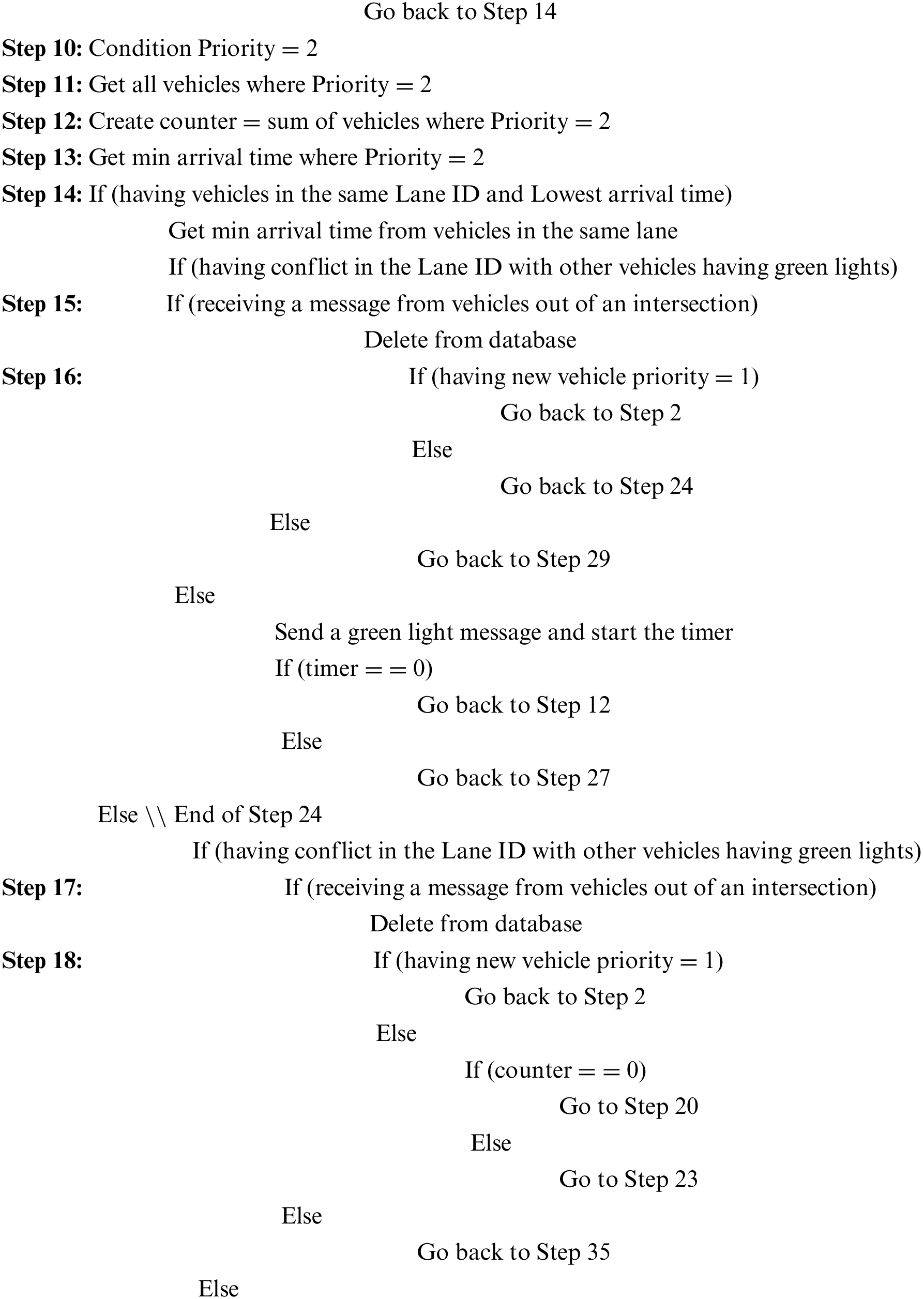
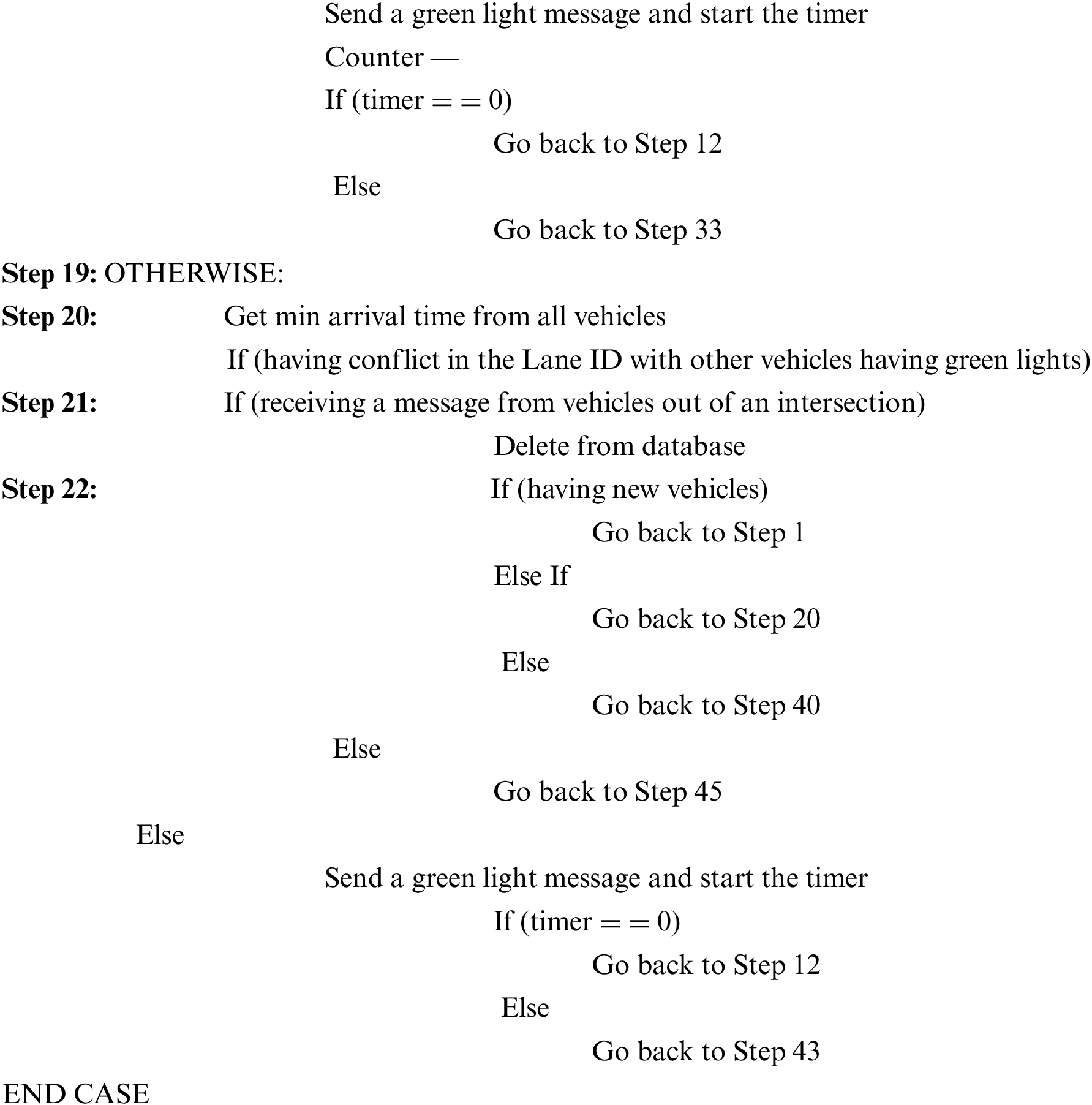
When the roadside unit receives the data from the vehicles, it adds it to the database. Following that, the algorithm starts working to allow vehicles to pass through the intersection by starting to determine the type of vehicle for identifying the vehicles with higher priorities. After that, the roadside unit selects the vehicle with the higher waiting time value to allow crossing the road first.
Before sending a message to allow the vehicle to cross the road, the RSU conducts a comparison to ensure that the path of the selected vehicle does not conflict with the vehicles with the green status.
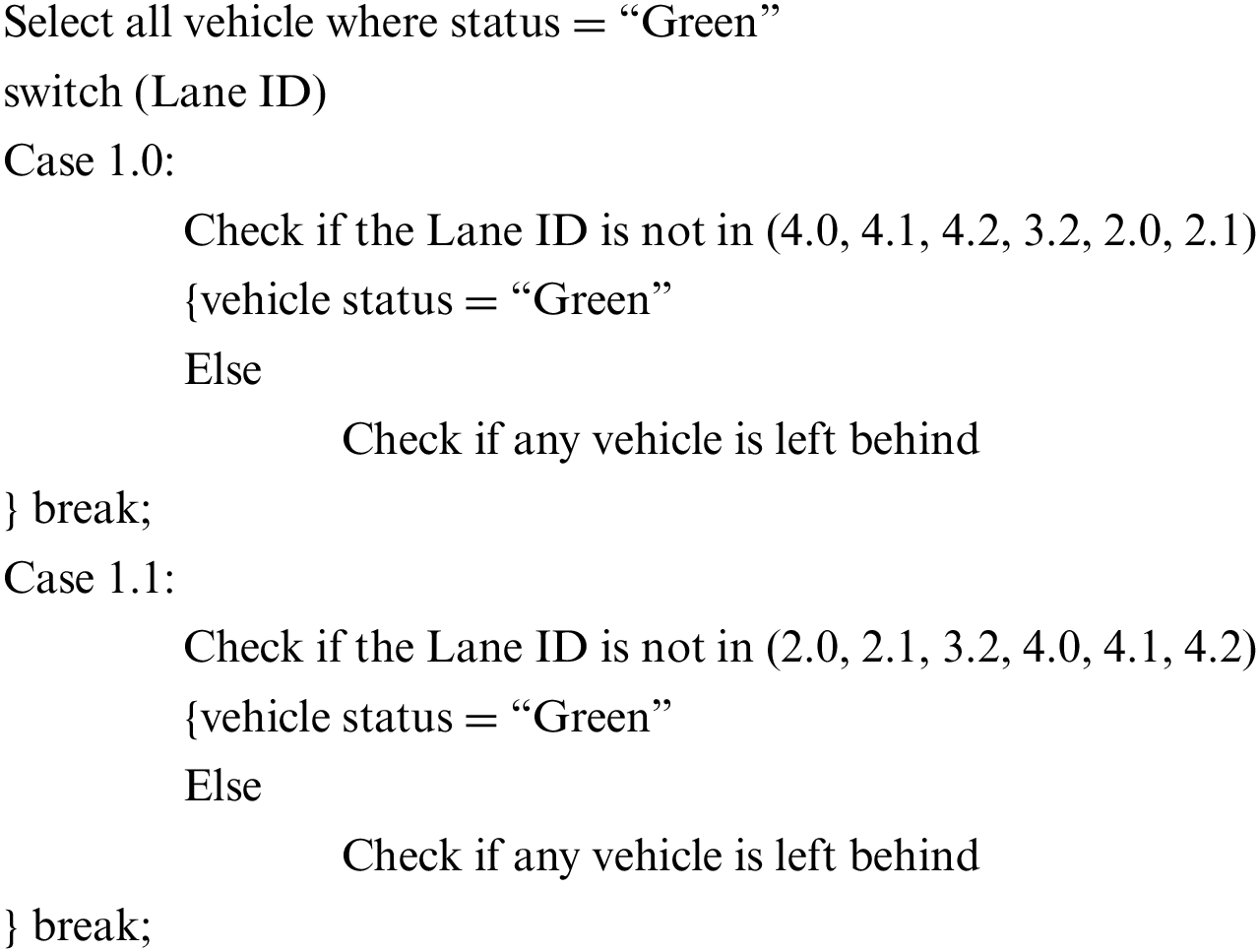
As shown by the pseudocode, checking if there is a conflict among the path of vehicles or not is based on the Lane number the vehicle has previously taken. Further, it is verified that the Lane of vehicles with green status does not conflict with the Lane of the vehicle that is selected to cross the intersection. For instance, if the selected vehicle is travelling on lane ID 1.0 before allowing it to pass, it must ensure that there are no vehicles that are with green status and have Lane ID (4.0, 4.1, 4.2, 3.2, 2.0, 2.1). Fig. 5 shows the way of distributing the Lane ID and the allowed vehicle direction for each lane ID.
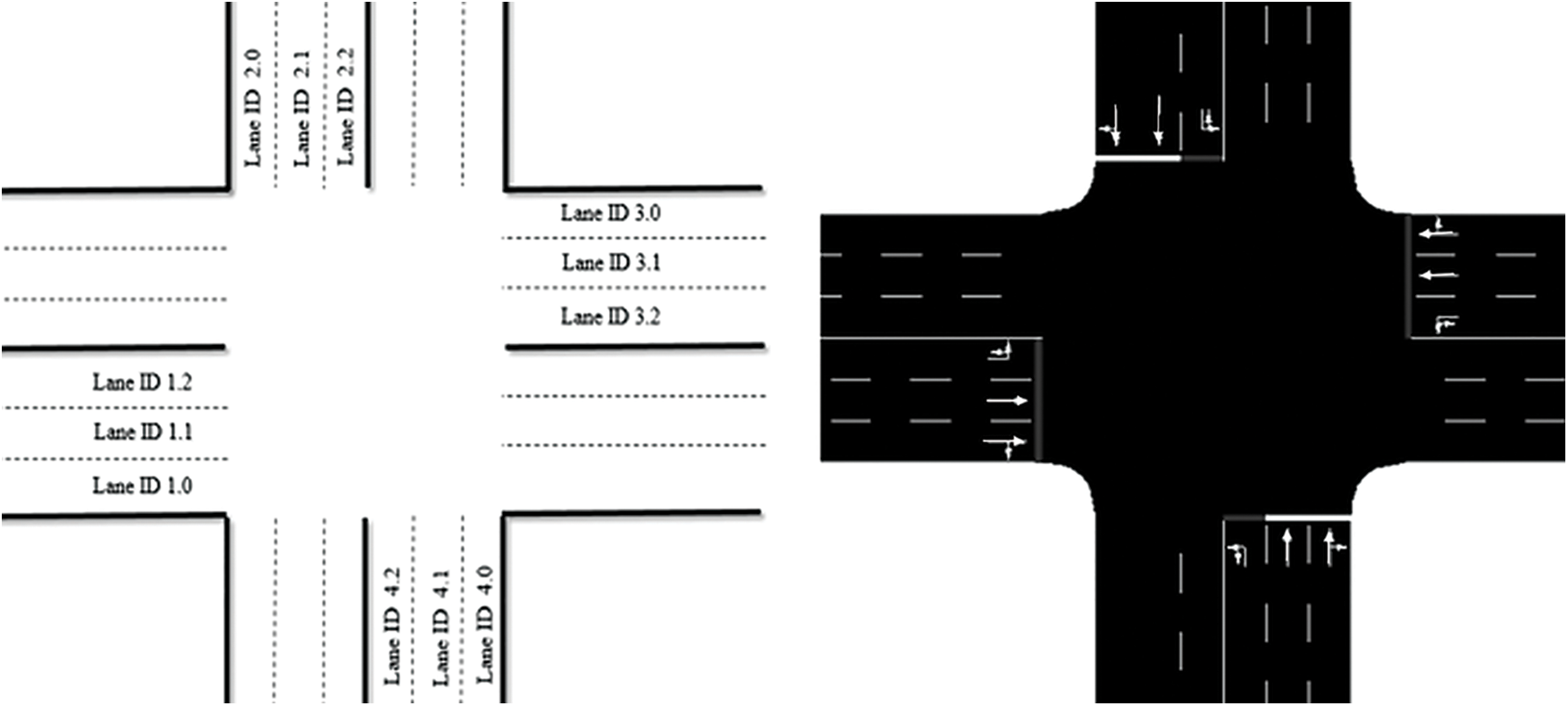
Figure 5: The distribution of the Lane ID and the allowed vehicle direction for each lane ID
3.3 Sending a Decision to Vehicles
When the roadside unit takes the most appropriate decision to allow the priority vehicle to cross, the RSU converts the status for this vehicle from red to green and starts the timer. After that, the RSU sends a message to the vehicle that is selected to cross where this message contains a status with the value “green light”. Table 4 depicts the format of the message and shows an example of the data that is sent from the roadside to the vehicle.

When the vehicle receives a message that is sent from the roadside unit, it converts the status from red to green and displays it on the screen inside the vehicle, which allows the vehicle to cross the intersection.
Following that, the RSU sends a message to the vehicle by allowing the vehicle to pass through the intersection and start the timer. Additionally, the vehicle should send a message to the RSU by acknowledging that the intersection is left behind before the termination of the timer. The RSU deletes the vehicle’s data from memory. Nonetheless, in case the vehicle delays sending this message, the roadside unit immediately sends a message to the relevant authority by informing them that there is an encountered problem at the intersection.
4 Experimental Results and Evaluation
In this section, the implementation of the proposed system is introduced, and the obtained two simulation results (OMNeT++) and (SUMO) are highlighted. After that, two frameworks (VEINS) and (INET) are imported into the OMNeT++ program to generate an adaptive work environment. The two simulations are run on a laptop computer with Intel Core I7 Duo CPU 2900 4M, 8GB DDR3 RAM, and Windows 10 operating system. A limited number of intersections is simulated by using these programs and equipment.
This section presents the results of the proposed system and the conventional traffic light system, where the two systems are applied to a variety of scenarios, and four of them are selected. The maximum duration of each scenario is 300,000 milliseconds.
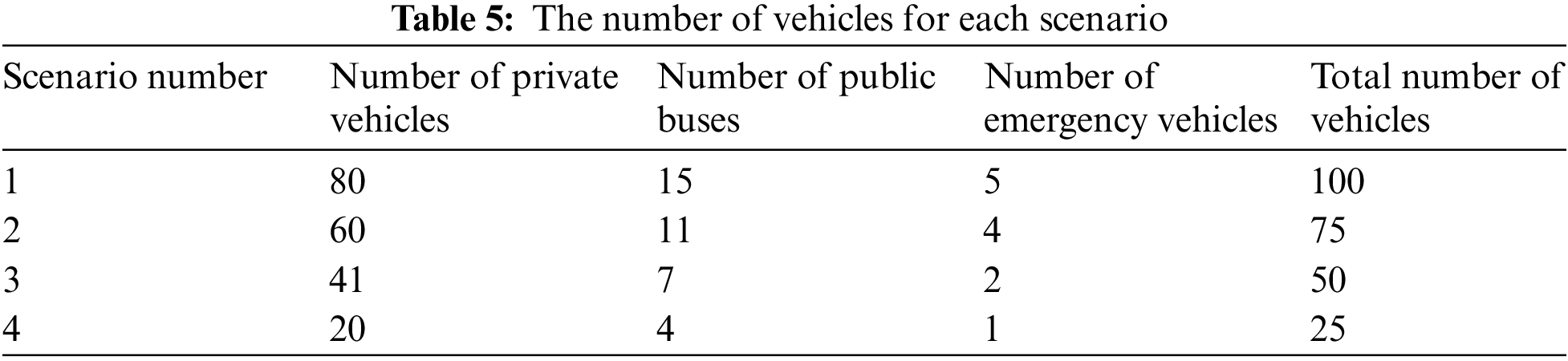
In each scenario, the average waiting time of each vehicle is presented, and the average waiting time of all vehicles depends on the vehicle type and travel time of each vehicle. Each applied scenario displays a different number of vehicles and contains different types of vehicles, where 5% represents emergency vehicles, 15% represents public buses, and the rest represents private vehicles. Table 5 shows the number of vehicles for each scenario.
The four scenarios are applied on the same map, which contains one intersection with equal priorities from all directions (see Fig. 6).
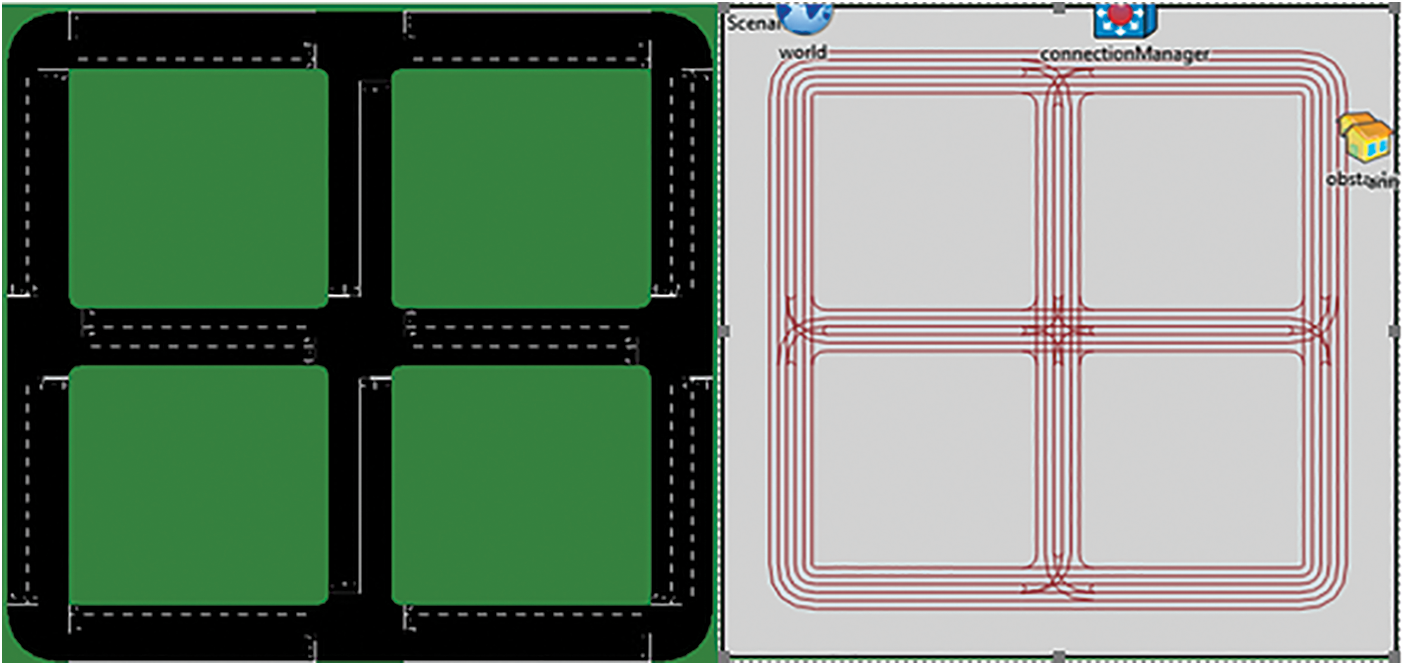
Figure 6: Maps used in the simulator
The first applied scenario includes 100 vehicles and three different vehicle types (see Table 6).
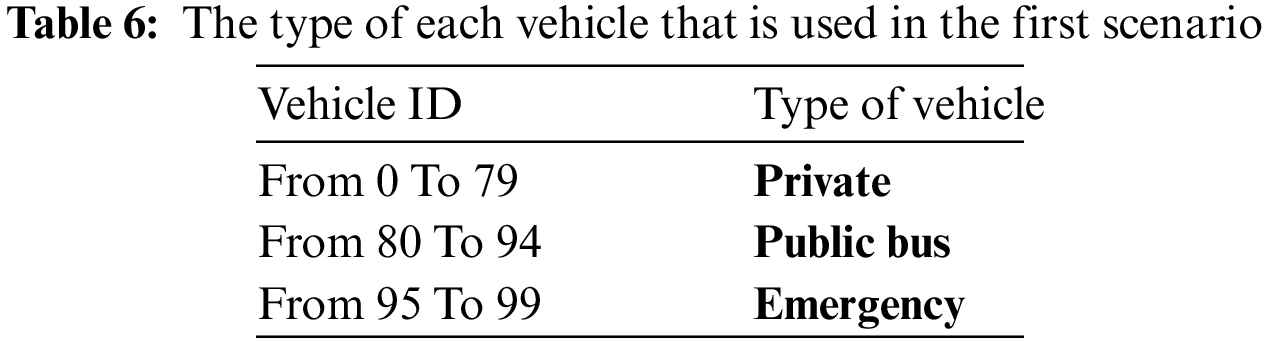
Fig.7. shows the average waiting time for each vehicle when applying the first scenario.
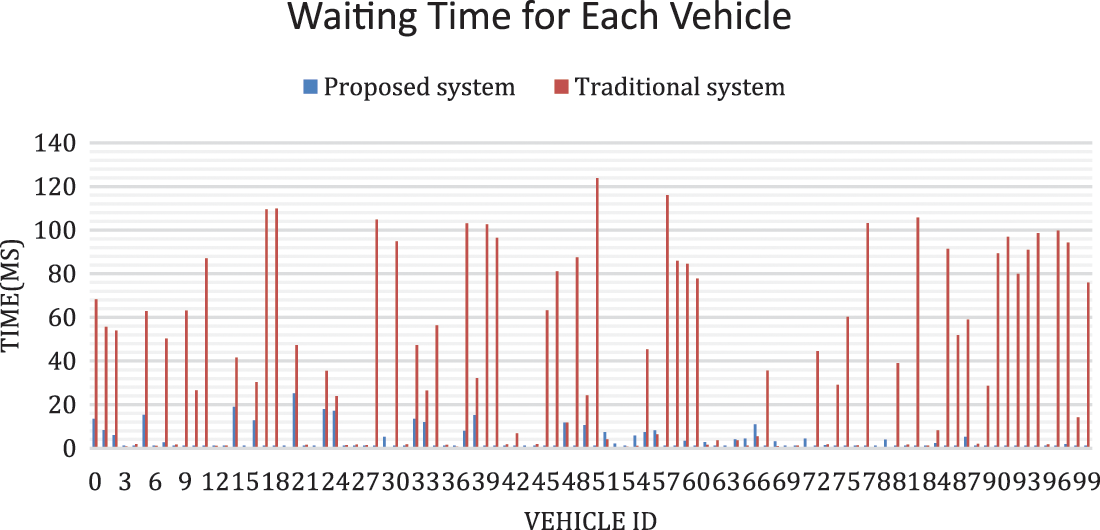
Figure 7: The waiting time for the entire vehicles
As shown in Fig.7 the proposed system significantly improves the traffic flow as it alleviates the waiting time of vehicles, mainly, the vehicles with priority.
Fig. 8 displays the total average waiting time for all vehicles used in the first scenario based on the type of vehicle (emergency, public buses, private).
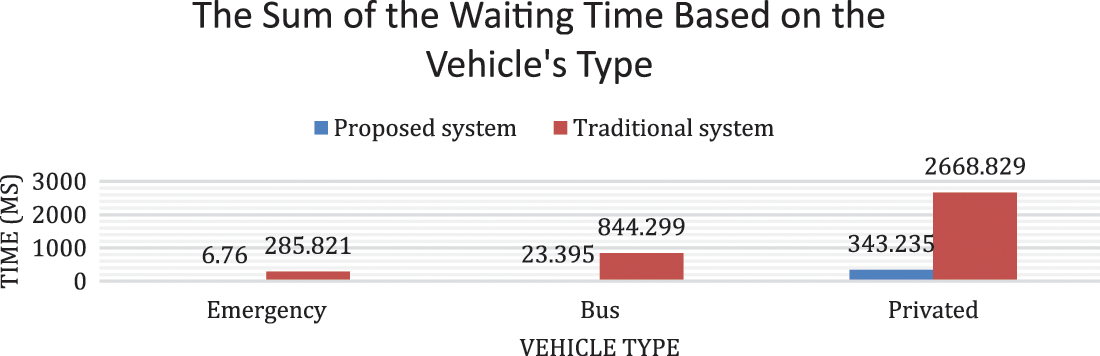
Figure 8: The sum of the waiting time based on the vehicle’s type
After implementing the proposed system, the average total waiting time for all vehicles reached 90.17%. The waiting time improvement rate of emergency vehicles reached 97.63% for public buses, and 97.23% for private vehicles, it reached 87.14%. On the other hand, the average travel time reduction rate for all vehicles in the scenario reached 47.59%.
This scenario contains 75 vehicles and three different vehicle types. Fig. 9 illustrates the average waiting time of each vehicle from the start of the trip to its termination when using 75 vehicles on the map. Fig. 10 illustrates the average waiting time of the entire types of vehicles, where the average waiting time for the entire vehicles is calculated based on the type of vehicle.
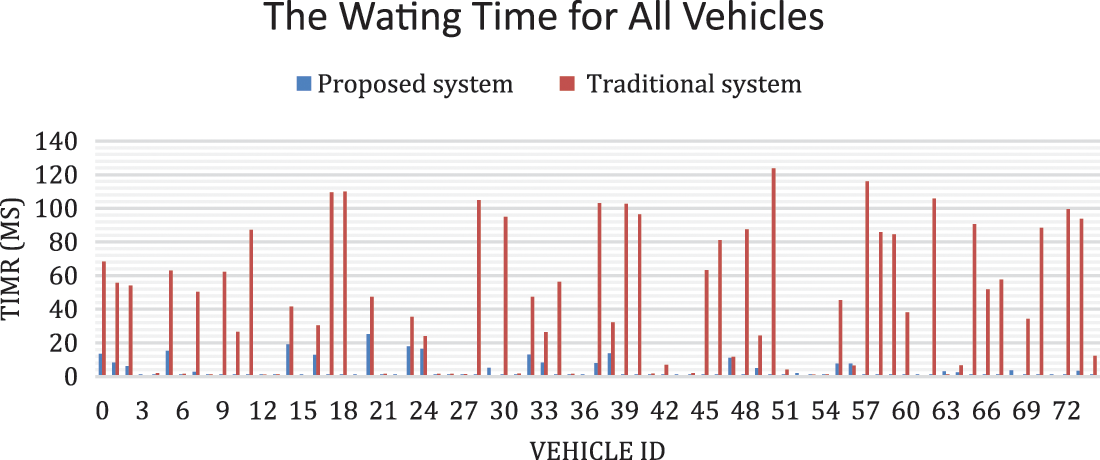
Figure 9: The waiting time for the entire vehicle
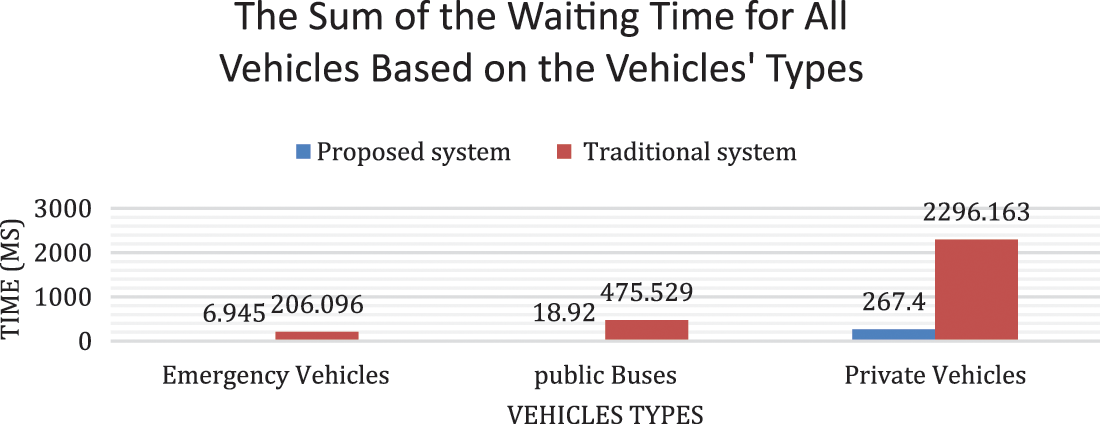
Figure 10: The sum of the waiting time based on the vehicle’s type
After implementing the proposed system, the average total waiting time of the improvement rate for all vehicles reaches 90.15%. The waiting time improvement rate for emergency vehicles reaches 96.63%; for public buses, it reaches 96.02%; and for private vehicles, it reaches 88.35%. As for the average travel time reduction rate of the entire vehicles in the scenario, it reaches 49.76%.
The third applied scenario includes 50 vehicles and three different vehicle types. Fig. 11 shows the average waiting time of each vehicle from the start of the trip to its termination when using 50 vehicles on the map. Fig. 12 shows the average waiting time of the entire vehicles types, where the average waiting time for the entire vehicle types is calculated based on the type of the vehicle.
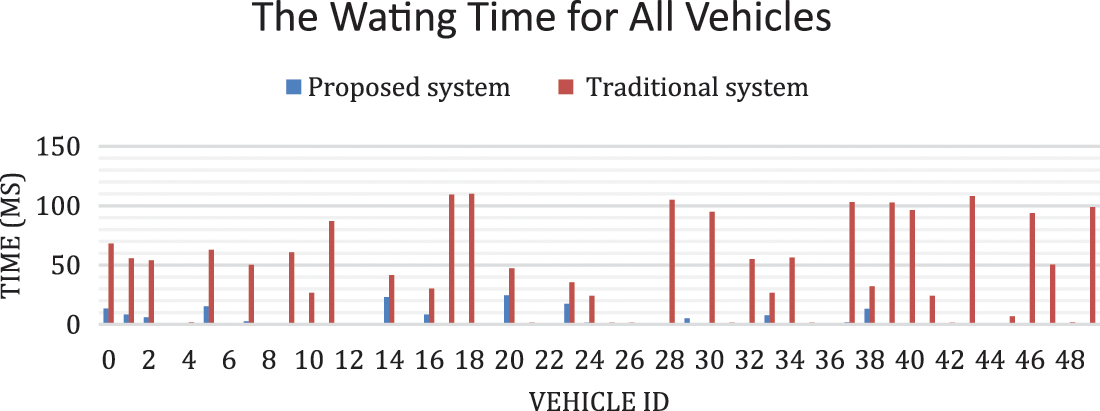
Figure 11: The waiting time for each vehicle of the third scenario
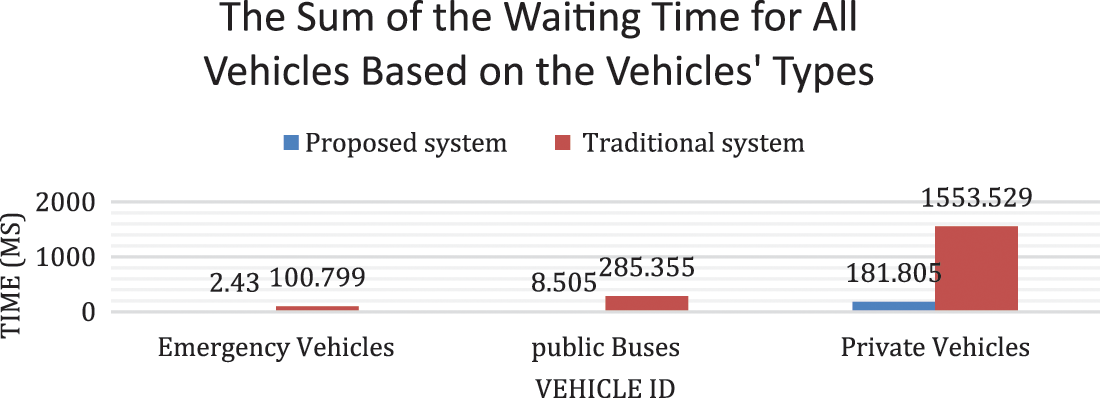
Figure 12: The sum of the waiting time based on the vehicle’s type in the third scenario
After implementing the proposed system, the average total waiting time of the improvement rate for all vehicles reaches 90.06%. The waiting time improvement rate for emergency vehicles reaches 97.59%; for public buses, it reaches 97.02%; and for private vehicles, it reaches 88.30%. The average travel time reduction rate of the entire vehicles in the scenario reaches 48.86%.
The fourth applied scenario includes 25 vehicles and three different vehicle types. Fig.13 presents the average waiting time of each vehicle from the start of the trip to its termination when using 25 vehicles on the map. Fig.14 shows the average waiting time of the entire vehicle types. The average waiting time for all vehicles is calculated based on the vehicle type.
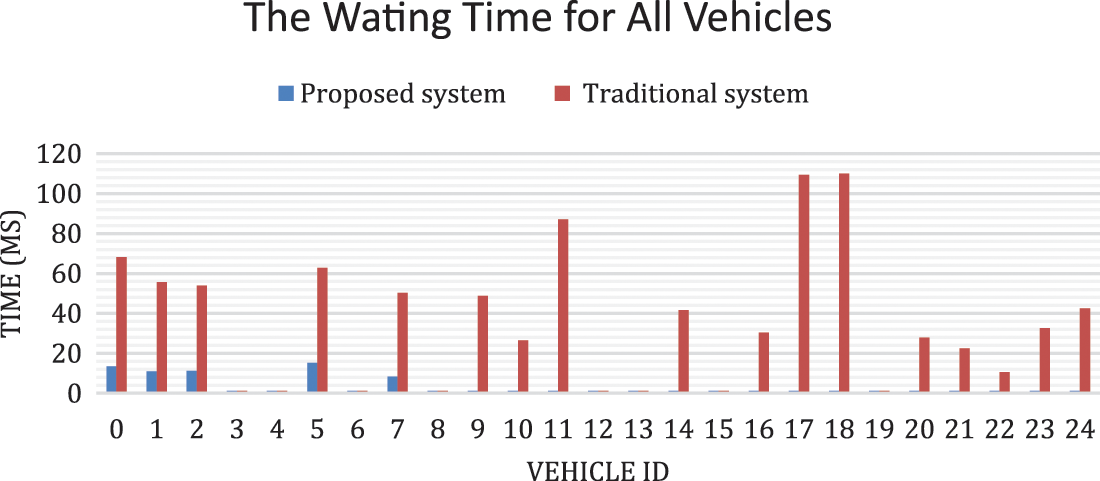
Figure 13: The waiting time for each vehicle in the fourth scenario
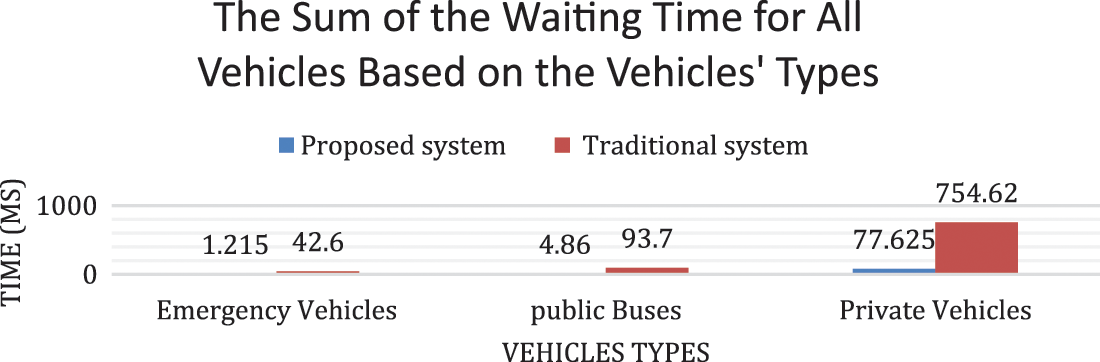
Figure 14: The sum of the waiting time based on the vehicle’s type in the fourth scenario
After implementing the proposed system, the average total waiting time of the improvement rate for all vehicles reached 90.04%. The waiting time improvement rate for emergency vehicles reached 97.15%; for public buses, it reached 94.81%; and for private vehicles, it reached 89.71%. The average travel time reduction rate of the entire vehicles in the scenario reached 44.43%.
In this paper, the virtual traffic light technology is used with a new proposed algorithm that can improve a vehicle’s flow at particular intersections and can reduce traffic congestion. This provides priority for some vehicles, such as emergency vehicles and public buses, to facilitate their traffic at the intersection.
The results of the proposed system are compared to the conventional system and can be summarised by the obtained improvement rate based on the total average waiting time for all vehicles, which reaches around 90.17%. The improvement in the total average waiting time for the entire emergency vehicles reaches around 97.63%; for all the public buses, it reaches around 97.23%; and for private vehicles, it shows an improvement rate that reaches around 87.14%. Furthermore, it is proven from the obtained results that an improvement in travel time reaches around 47.59%.
The future research aims to add the Pedestrian (V2P) model to the proposed system and providing it with the appropriate priority to become a practical part of the system and reduce human incidents at intersections as the safety of pedestrians and their safe passage from the intersection are equally significant to the safe movements of vehicles.
Acknowledgement: The authors thank AL-Zaytoonah University of Jordan for supporting this research.
Funding Statement: No funding to declare.
Availability of Data and Materials: The data is available upon request from the authors.
Conflicts of Interest: The authors declare that they have no conflict of interest to report regarding the present study.
References
1. J. R. Srivastava and T. Sudarshan, “Intelligent traffic management with wireless sensor networks,” in Proc. ACS Int. Conf. on Computer Systems and Applications (AICCSA), Ifrane, Morocco, pp. 1–4, 2013. [Google Scholar]
2. A. A. Hnaif, N. A. Al-Madi, M. Abduljawad and A. Ahmad, “An intelligent road traffic management system based on a human community genetic algorithm,” in Proc. IEEE Jordan Int. Joint Conf. on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, pp. 554–559, 2019. [Google Scholar]
3. A. Tamimi, M. AbuNaser, A. A. Tawalbeh and K. Saleh, “Intelligent traffic light based on genetic algorithm,” in Proc. IEEE Jordan Int. Joint Conf. on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, pp. 851–854, 2019. [Google Scholar]
4. K. Jaber, R. Abdullah and N. Abdul Rashid, “Fast decision tree-based method to index large DNA-protein sequence databases using hybrid distributed-shared memory programming model,” International Journal of Bioinformatics Research and Applications, vol. 10, no. 3, pp. 321–340, 2014. [Google Scholar] [PubMed]
5. H. Yi, H. Jung and S. Bae, “Deep neural networks for traffic flow prediction,” in Proc. IEEE Int. Conf. on Big Data and Smart Computing (BigComp), Jeju, South Korea, pp. 328–331, 2017. [Google Scholar]
6. J. A. Omina, “An intelligent traffic light control system based on fuzzy logic algorithm,” International Academic Journal of Information Systems and Technology, vol. 1, no. 5, pp. 1–17, 2015. [Google Scholar]
7. M. Tubaishat, Y. Shang and H. Shi, “Adaptive traffic light control with wireless sensor networks,” in Proc. IEEE Consumer Communications and Networking Conf., Las Vegas, NV, USA, pp. 187–191, 2007. [Google Scholar]
8. A. Alkhatib, K. Abu Maria, S. Alzu’bi and E. Abu Maria, “Novel system for road traffic optimisation in large cities,” IET Smart Cities, vol. 4, no. 2, pp. 143–155, 2022. [Google Scholar]
9. W. C. Tchuitcheu, C. Bobda and M. J. H. Pantho, “Internet of smart-cameras for traffic lights optimization in smart cities,” Internet of Things, vol. 11, no. 2, pp. 100207, 2020. [Google Scholar]
10. A. A. Alkhatib and T. Sawalha, “Techniques for road traffic optimization: An overview,” Indian Journal of Computer Science and Engineering, vol. 11, no. 4, pp. 311–320, 2020. [Google Scholar]
11. J. Wang, Y. Shao, Y. Ge and R. Yu, “A survey of vehicle to everything (v2x) testing,” Sensors, vol. 19, no. 2, pp. 334–354, 2019. [Google Scholar] [PubMed]
12. M. Ferreira, R. Fernandes, H. Conceição, W. Viriyasitavat and O. K. Tonguz, “Self-organized traffic control,” in Proc. Seventh ACM Int. Workshop on Vehicular Internetworking (VANET ‘10), Chicago, Illinois, USA, pp. 85–90, 2010. [Google Scholar]
13. H. Conceicao, M. Ferreira and P. Steenkiste, “Virtual traffic lights in partial deployment scenarios,” in Proc. of the 2013 IEEE Intelligent Vehicles Symp. (IV), Old Coast, QLD, Australia, 2013. [Google Scholar]
14. O. Gama, A. Santos, A. Costa, M. J. Nicolau, B. Dias et al., “Evaluation of push and pull communication models on a VANET with virtual traffic lights,” Information-An International Interdisciplinary Journal, vol. 11, no. 11, pp. 510–530, 2020. [Google Scholar]
15. T. M. Wynn, M. Yangon, W. W. Kyaw and M. Toungoo, “Performance evaluation of virtual traffic light (VTL) algorithm vs traffic light system (TLS) in SUMO,” International Journal of Science and Engineering Applications, vol. 8, no. 8, pp. 287–290, 2019. [Google Scholar]
16. V. Martins, J. Rufino, L. Silva, J. Almeida, B. Miguel Fernandes Silva et al., “Towards personal virtual traffic lights,” Information, vol. 10, no. 1, pp. 32, 2019. [Google Scholar]
17. M. Al-Qutwani and X. Wang, “Smart traffic lights over vehicular named data networking,” Information, vol. 10, no. 3, pp. 83, 2019. [Google Scholar]
18. A. Bazzi, A. Zanella, B. M. Masini and G. Pasolini, “A distributed algorithm for virtual traffic lights with IEEE 802.11 p,” in Proc. European Conf. on Networks and Communications (EuCNC), Bologna, Italy, pp. 1–5, 2014. [Google Scholar]
19. M. Nakamurakare, W. Viriyasitavat and O. K. Tonguz, “A prototype of virtual traffic lights on android-based smartphones,” in 2013 IEEE Int. Conf. on Sensing, Communications and Networking (SECON), New Orleans, LA, USA, pp. 236–238, 2013. [Google Scholar]
20. I. Isasi, L. Larburu, M. Martinez and V. Molinete, “I2V communication driving assistance system: on-board traffic light assistant,” in Proc. of the 2008 IEEE 68th Vehicular Technology Conf., Calgary, BC, Canada, pp. 1–5, 2008. [Google Scholar]
21. R. A. Gheorghiu and M. Minea, “Energy-efficient solution for vehicle prioritisation employing ZigBee V2I communications,” in Proc. Int. Conf. on Applied and Theoretical Electricity (ICATE), Craiova, Romania, pp. 1–6, 2016. [Google Scholar]
22. V. Kodire, S. Bhaskaran and H. N. Vishwas, “GPS and ZigBee based traffic signal preemption,” in Proc. Int. Conf. on Inventive Computation Technologies (ICICT), Coimbatore, India, pp. 1–5, 2016. [Google Scholar]
23. M. Gollapalli, A. Atta-ur-Rahman, D. N. Ibrahim, M. A. Khan, S. Abbas et al., “A neuro-fuzzy approach to road traffic congestion prediction,” Computers, Materials & Continua, vol. 73, no. 1, pp. 295–310, 2022. [Google Scholar]
24. F. Rasheed, K. -L. Alvin Yau, R. Md Noor and Y.-W. Chong, “Deep reinforcement learning for addressing disruptions in traffic light control,” Computers, Materials & Continua, vol. 71, no. 2, pp. 2225–2247, 2002. [Google Scholar]
25. M. Rapelli, C. Casetti and M. Sgarbi, “A distributed V2V-based virtual traffic light system,” in Proc. Int. Conf. on Communication Systems & Networks (COMSNETS), Bengaluru, India, pp. 122–128, 2020. [Google Scholar]
26. N. Maslekar, J. Mouzna, M. Boussedjra and H. Labiod, “CATS: An adaptive traffic signal system based on car-to-car communication,” Journal of Network and Computer Applications, vol. 36, no. 5, pp. 1308–1315, 2013. [Google Scholar]
27. F. Hagenauer, P. Baldemaier, F. Dressler and C. Sommer, “Advanced leader election for virtual traffic lights,” ZTE Communications, vol. 12, no. 1, pp. 11–16, 2014. [Google Scholar]
28. V. V. Gayah, X. Gao and A. S. Nagle, “On the impacts of locally adaptive signal control on urban network stability and the macroscopic fundamental diagram,” Transportation Research Part B: Methodological, vol. 70, no. 1–2, pp. 255–268, 2014. [Google Scholar]
29. K. Pandit, D. Ghosal, H. M. Zhang and C. -N. Chuah, “Adaptive traffic signal control with vehicular Ad Hoc networks,” IEEE Transactions on Vehicular Technology, vol. 62, no. 4, pp. 1459–1471, 2013. [Google Scholar]
30. A. Demba and D. P. Möller, “Vehicle-to-vehicle communication technology,” in Proc. IEEE Int. Conf. on Electro/Information Technology (EIT), Rochester, MI, USA, pp. 459–464, 2018. [Google Scholar]
31. R. Rak, “Vehicle identification number-anatomy of error occurrence,” Journal of Physics: Conference Series, vol. 1303, no. 1, pp. 12146, 2019. [Google Scholar]
32. A. AutoScaut, what controls a car for VIN [online] 24CarShop.com,” [Accessed 8 Sep. 2022], 2021. [Online]. Available at : https://24carshop.com/articles/what-controls-a-car-for-vin-2021/ [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools