
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Efficient-Cost Task Offloading Scheme in Fog-Internet of Vehicle Networks
1 Department of Electrical Power Techniques Engineering, Al-Hussain University College, Karbala, Iraq
2 Department of Computer Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
3 Department of Computer Science, Thi-Qar University, Thi-Qar, Iraq
4 Department of Computer Science, Mercu Buana University, Jakarta, Indonesia
* Corresponding Author: Seyed Amin Hosseini Seno. Email:
Computer Systems Science and Engineering 2023, 45(2), 2223-2234. https://doi.org/10.32604/csse.2023.032316
Received 13 May 2022; Accepted 24 June 2022; Issue published 03 November 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Fog computing became a traditional OffLad Destination (OLD) to compute the offloaded tasks of the Internet of Vehicles (IoV). Nevertheless, the limited computing resources of the fog node leads to re-offload these tasks to the neighboring fog nodes or the cloud. Thus, the IoV will incur additional offloading costs. In this paper, we propose a new offloading scheme by utilizing RoadSide Parked Vehicles (RSPV) as an alternative OLD for IoV. The idle computing resources of the RSPVs can compute large tasks with low offloading costs compared with fog nodes and the cloud. Finally, a performance evaluation of the proposed scheme has been presented and discussed with other benchmark offloading schemes.Keywords
Internet of Vehicles (IoV) plays an important role in intelligent transportation system (ITS) for their benefits in providing collision warning, traffic congestion detection, route planning, and infotainment services [1]. Recently, different IoV applications such as autonomous driving, navigation, gaming, and obstacle detection are expected to guide the driver and decrease the traffic accident rate, as well as improve traffic efficiency and traveling convenience. As a result, these applications need high computing resources for excellent processing [2–4]. Computational offloading enables tasks to be shared between IoT devices, fog nodes, and cloud servers [5]. Nowadays, the computation offloading IoV tasks has been developed efficiently like routing [6,7] based on different optimization techniques that have been proposed [8,9]. The centralized cloud is considered a computing paradigm that provides powerful resources, on-demand services, and processing massive information efficiently [10]. So, it can be used for solving the problems of data storage, data processing, and data analysis in the IoV [11]. However, offloading to the cloud has several drawbacks such as the high latency and cost of the data transmission, due to the long-distance issue [12,13], thus a serious degradation in the offloading efficiency [14]. Fog computing has been proposed to bring low latency and reduced bandwidth to the users by moving the resources (i.e., compute, storage, and services) to the edge network [15]. Notwithstanding, the limited computing resource of the fog node leads to re-offloading the tasks to the nearby fog nodes or cloud [16–18] which incurred additional transmission and processing costs [19]. The dense deployment of the RSPVs that have idle computing resources (likes CPUs) and rechargeable batteries [20] in the urban areas can make them a suitable computing resource for processing the tasks. Also, they have a low charging cost [12] compared with fog and cloud as well as they can communicate with any vehicle moving near them. In this paper, we propose a task offloading scheme by using the RSPVs as a computation offload destination. This scheme is better suited to the large urban area because of the following reasons. First, the number of parking vehicles on the roadside is reasonably high, so it is considered a suitable computing infrastructure. Second, these parked vehicles spend a long time in fixed locations, whereas their processing resources are idle. Besides, the close distance of this scheme reduces the cost of transmission and processing, thus minimizing the total offloading cost. The main contributions of this paper can be summarized as follows:
(1) We propose a RSPV offloading scheme in the Fog-IoV network, such that the idle computing resources of RSPV can be utilized effectively for processing the offloaded tasks.
(2) We formulate the assignment tasks from the IoV to the suitable RSPVs through a mathematical model to minimize the total offloading cost of the offloaded tasks under their budget and deadline constraints.
(3) We solve the mathematical model by CPLEX optimization software, in which the offloaded tasks can be assigned to the optimal RSPVs. Simulation results validate the effectiveness of our offloading scheme.
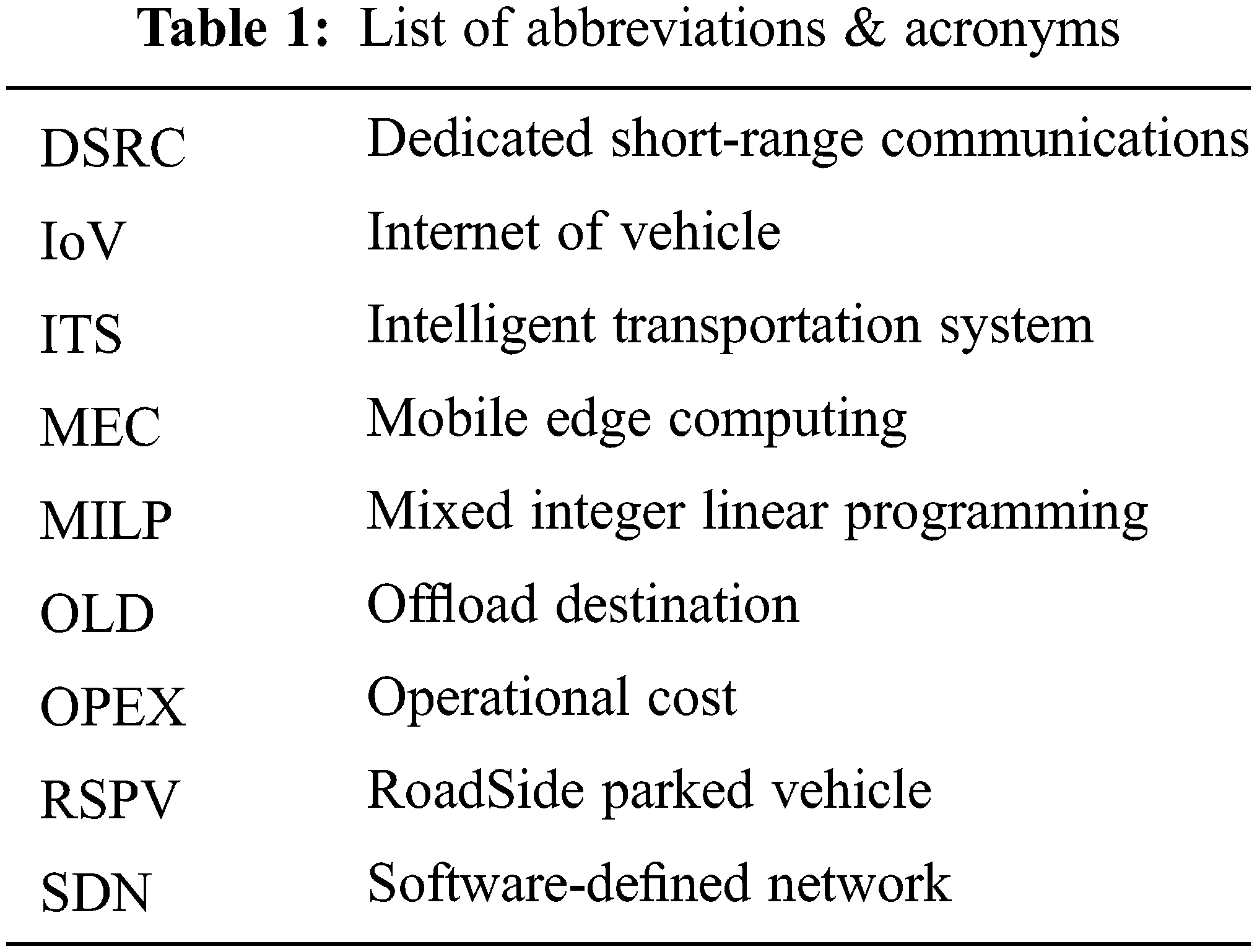
The rest of this paper is organized as follows: Section 2 compares our proposed scheme with some related works. Section 3 describes the system model and problem formulation. The proposed solution and example are presented in Section 4. Simulation results and discussions are presented in Section 5 and Section 6. Finally, Section 7 concludes the work and presents suggestions for the future scope of research. Tab. 1 explains the abbreviations that are used in the paper.
This section describes existing work related to different aspects of task offloading cost. Several paradigms have been used to reduce the task offloading cost in terms of data transmission cost, task computation (processing) cost, or both. Du et al. [2] presented a dual-side optimization offloading decision problem to minimize the cost of both vehicles and corresponding MEC servers simultaneously, where TV white space bands have been used to reinforce the bandwidth for computation offloading. He et al. [21] utilized the SDN for heterogeneous vehicular networks, where different network resources are properly scheduled to minimize communications costs. The cost-efficient resource management problem has been addressed in [22]. They minimized the overall cost which includes the communication cost and VM deployment cost while satisfying the QoS requirement. Zhang et al. [23] proposed a cloud-based MEC offloading framework. They presented transmission offloading schemes by considering the time consumption of the computation task and the mobility of the vehicles. However, the cost-saving effectiveness is weak when the density of the vehicles on the road is small. Also, increasing the speed of vehicles can add more backhaul transmission costs to the total offloading costs. Pham et al. [24] investigated the resource limitation issue of the MEC server. They proposed an offloading policy to select the proper computing nodes and the number of computing resources for the tasks. The proposed policy did not consider the transmission cost of the task. Liu et al. [25] investigated the optimal offloading problem in the mobile fog computing system. Based on the theoretical analysis, a multi-objective optimization problem is formulated, which involves minimizing energy consumption, service delay, and payment cost. However, the transmission cost of the task has been ignored. To improve the limited coverage of the RSU, LiWang et al. [26] proposed a mechanism based on SDN through the offloading of moving vehicles under delay and cost constraints. This mechanism can reduce the monetary cost of the IoV, and guarantee the profits of the moving vehicles. However, the operational cost (OPEX) was high. Li et al. [27] proposed a load-aware MEC offloading method, in which each vehicle makes MEC server selection based on the predicted cost. This cost includes the cost of uploading the task, computing the task on the MEC server, and downloading the computation output, respectively. Wang et al. [28] considered that the end-user should pay a cost to MEC server for occupying the computation and bandwidth resource. They take the charge of both data transmission and task computation as one part of the total cost that is minimized. Tab. 2 shows a comparison between our proposed offloading scheme and the related works according to different parameters and paradigms that have been used.

3 System Model and Problem Formulation
Fig. 1 shows our proposed RSPV offloading scheme. From the Figure, it can be seen that the scheme includes the moving vehicles (i.e., IoVs), RSPVs, and fog nodes. The RSPVs are grouped as a chain line on each road, whereas, the fog nodes are distributed in different locations and communicated with each other through a wireless backhaul. Moreover, all fog nodes have been connected with the cloud through a backbone network. The RSPV that has been interested to rent out its computing resource, sends the status information such as the vehicle number, computation capacity, cost per unit time of using processing resources, and the parking time to the closet fog node. The fog node records them in an RSPV table, which can be updated periodically through the feedback of the RSPVs. Whenever the moving vehicle decides to offload the tasks that cannot be accomplished locally, it sends an offloading query over 3G/LTE interface to the nearest fog node. The fog node responds to this offloading query by sending a response message that contains the RSPV table. According to this table, the moving vehicle can assign the tasks to the suitable RSPV over the low-cost short-range communication DSCR interface thus the cost of data transfer per unit time is different [29]. The RSPV has a low cost in terms of infrastructure and application deployment [30,31], so intuitively the processing cost of the RSPV will be relatively less compared with the traditional computing resources such as fog nodes and cloud [12].
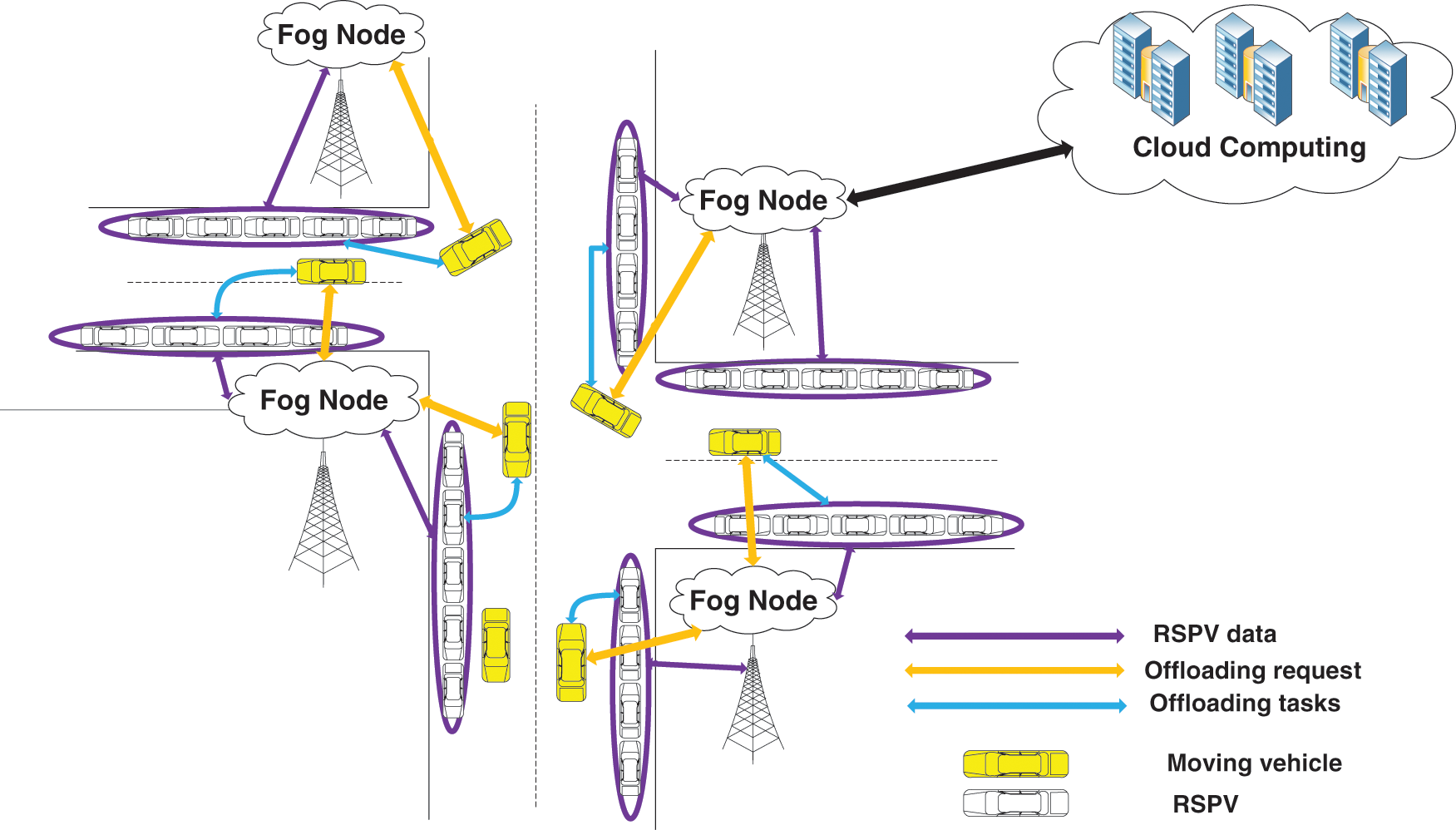
Figure 1: Proposed RSPV network architecture
Autonomous driving is the practical application that is assumed to be used with the proposed scheme. Autonomous driving has higher demands on data processing and storage capabilities and thus still requires more available resources [32]. So, let a moving vehicle has

In this subsection, we explain the offloading delay model of the offloaded computation tasks at the RSPV, where the offloading delay comprises two parts. The first part is the data transmission delay which represents the time consumed for transferring the data of the task to the selected RSPV. The second part is the task processing delay which represents the time consumed for executing the task on the RSPV. Formally, the offloading delay of the task i at the RSPV j can be expressed as (1).
where
Generally, the offloading cost consists of the data transmission cost and task processing cost [34]. To obtain the data transmission cost, we define
Similarly, to calculate the task processing cost, we define
Finally, the offloading cost for the task
Now, we formulate the assignment task offloading as an optimization problem. The goal is to minimize the total offloading cost under budget and deadline constraints. Therefore, we define an assignment optimization variable
Subject to:
Here, constraint C1 ensures that each task must be executed on only one RSPV. Constraint C2 states that each RSPV can receive at most one task at a given time. Constraint C3 enforces that the offloading cost at the RSPV should be less than or equal to the budget of the task, thus the total offloading cost will be less than the total budget of the tasks. According to constraint C4, the offloading delay at RSPV should not exceed the deadline of the task and the total contact time. The last constraint C5 denotes
4 Proposed Solution and Example
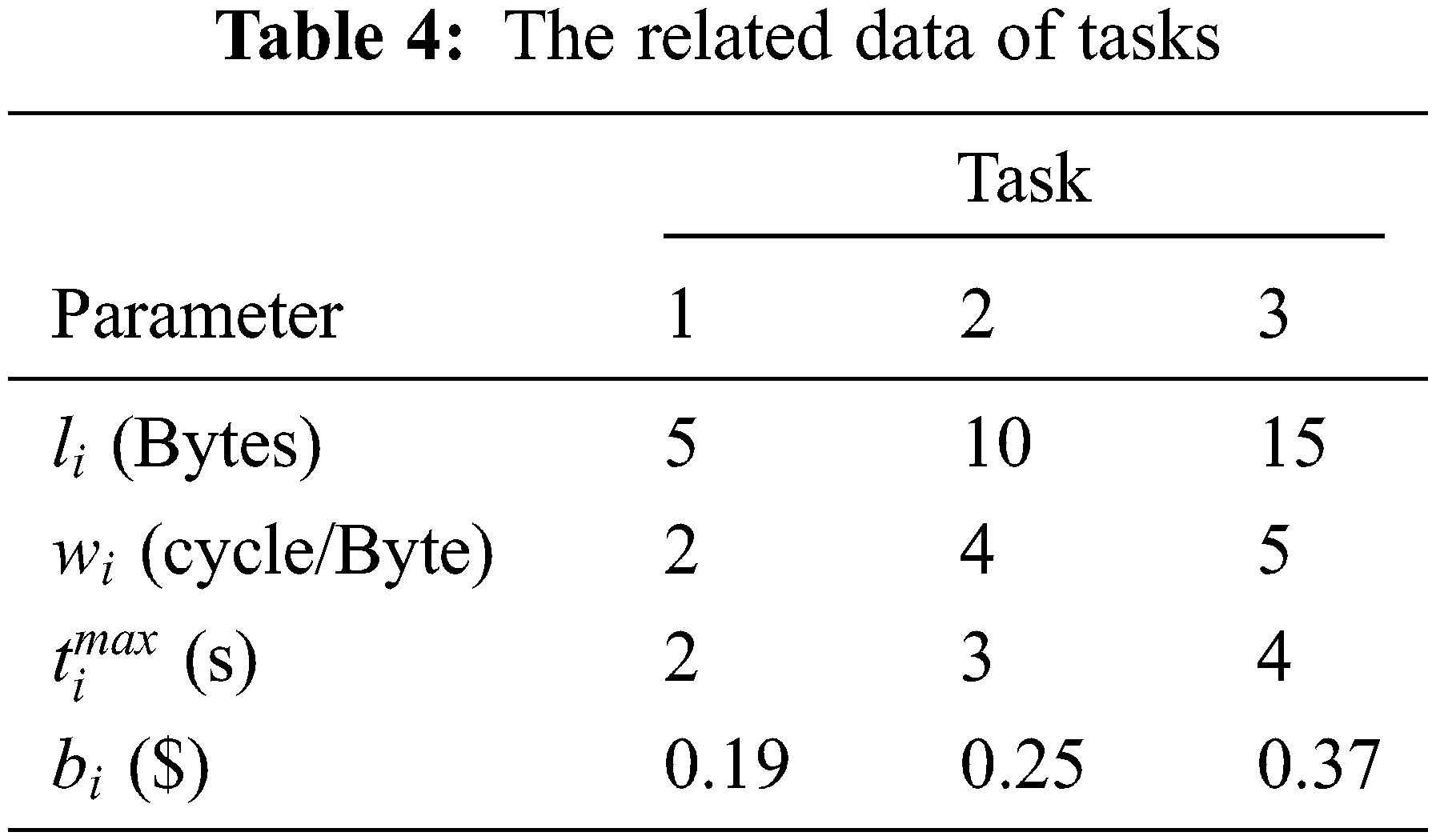
Minimization of the total offloading cost (P2) is considered a MILP problem which is solved by using CPLEX mathematical optimization software. The following example is performed to explain the effectiveness of the proposed model. Let the number of tasks (

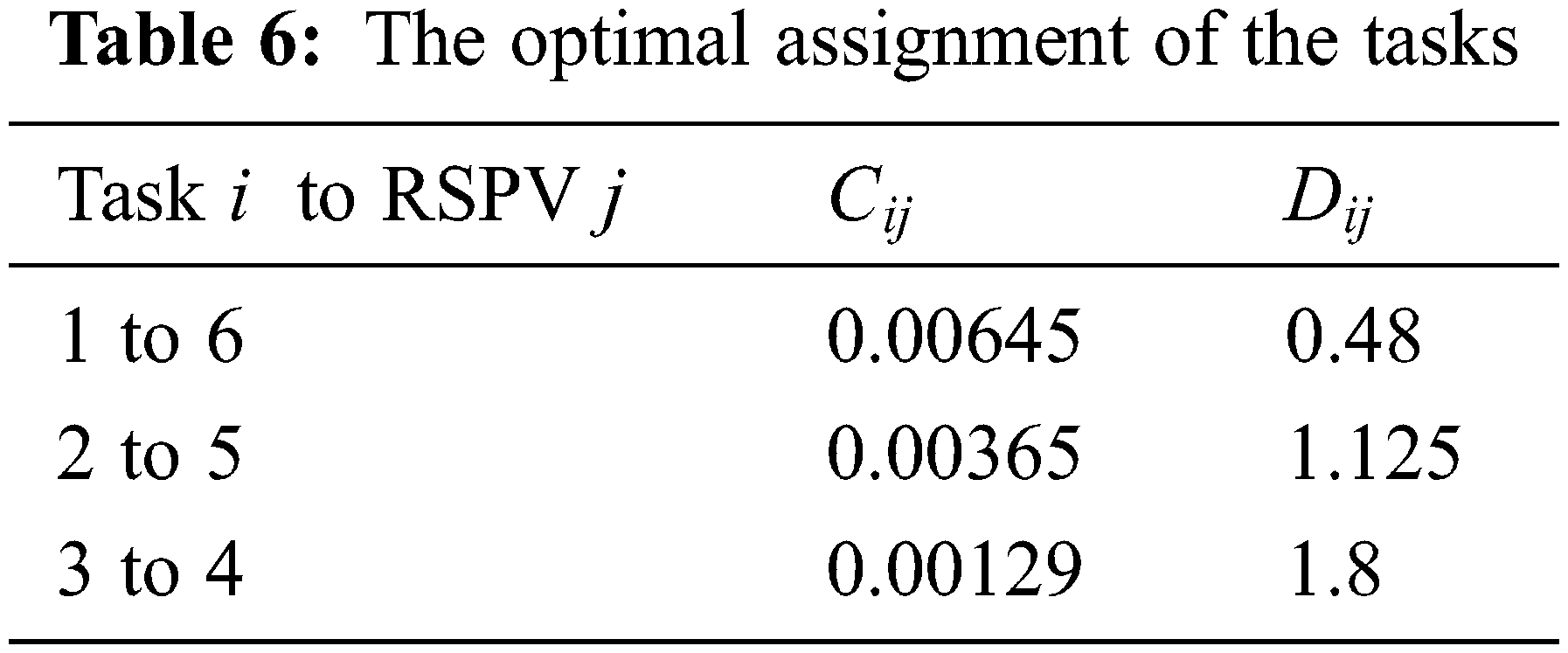
The optimal solution of the (P1) in this example is 0.01139 $. The suitable assignment of the tasks in terms of the offloading cost associated with the offloading delay is shown in Tab. 6.
In this section, the proposed RSPV offloading scheme is evaluated to investigate its performance and effectiveness in comparison with three benchmark offloading schemes which are:
• Fog-Cloud offloading scheme [35]: The fog node will re-offload the tasks to the cloud for execution with a high cost of transmission and processing. In the simulation scenario, we assume the cost unit of data transmission and task processing for the cloud in the range (0.01–0.09) $/s. Also, the computation capacity and the data transmission rate are assumed 100 cycle/s and 50 Mb/s respectively.
• Fog-Fog offloading scheme [36]: The fog node will re-offload the tasks to the neighboring fog nodes with additional transmission costs. In the simulation scenario, we assume the cost unit of data transmission and task processing of the fog in the range (0.001–0.009) $/s and the cost unit of data transmission between the fog nodes has a fixed value of 0.002 $/s. Also, the computation capacity and the data transmission rate are assumed 50 cycles/s and 25 Mb/s respectively.
• Cost-aware offloading scheme [14]: The vehicle makes MEC server selection based on the predicted cost and load distribution of MEC servers. In this scheme, the transmission cost represents the cost of the V2I transmission or multi-hop V2V relay transmission. Similarly, the cost of result feedback takes a multi-hop wireless backhaul relay between several MECs. In the simulation scenario, we assume the cost unit of data transmission and task processing of the MEC in the range (0.001–0.009) $/s and the cost unit of data transmission through the multi-hop wireless backhaul and V2V relay are 0.002 $/s and 0.001$/s respectively. Also, the computation capacity and the data transmission rate are assumed 50 cycles/s and 30 Mb/s respectively. We consider a simulation scenario with the following setting and the detail is shown in Tab. 7.
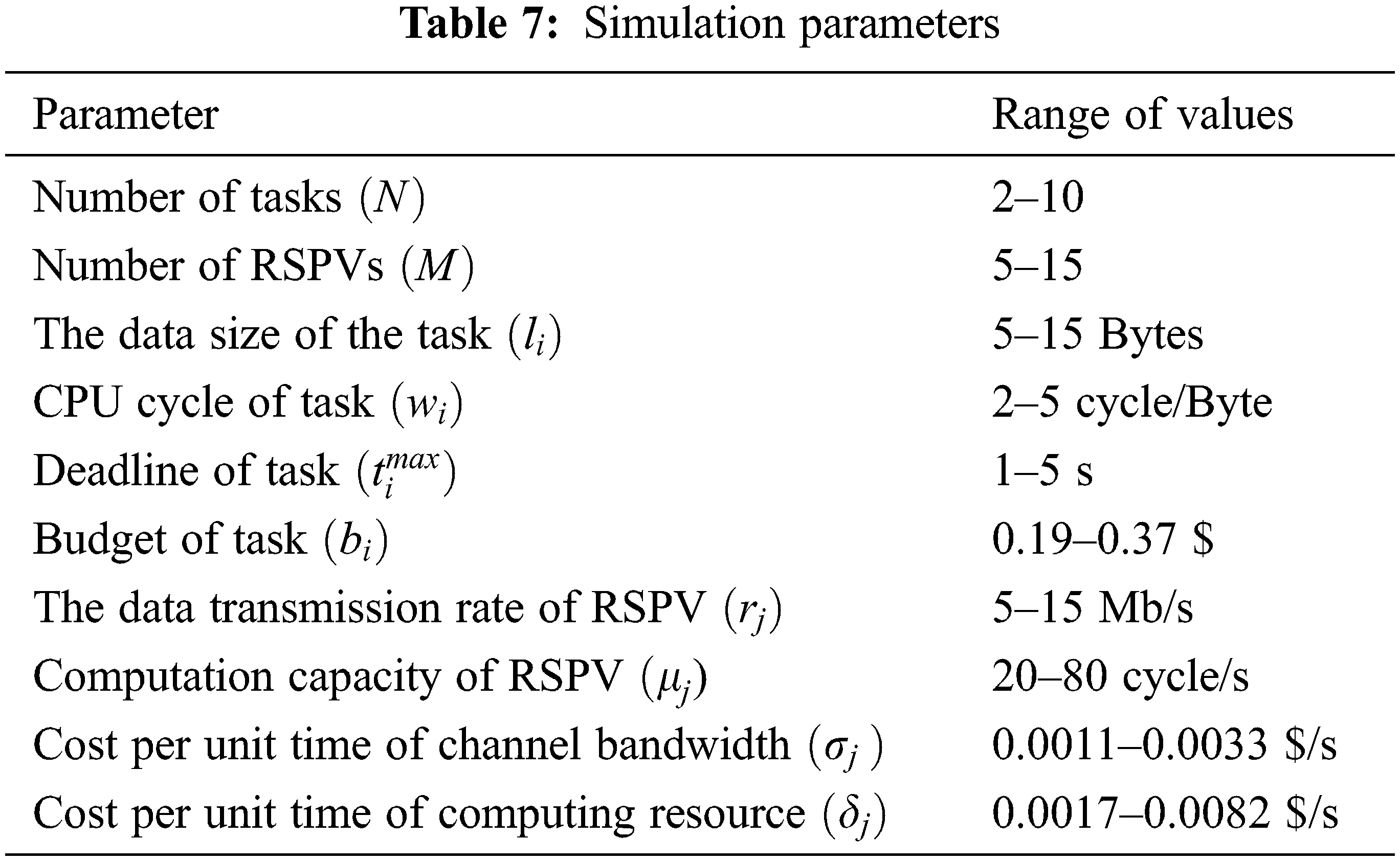
Fig. 2 compares our proposed scheme with other offloading schemes through the total offloading cost for a different number of tasks. From the Figure, it can be observed that when the number of tasks is increased, the total offloading cost of other schemes is significantly increased. In the Fog-Cloud scheme, the total offloading cost is very high because of the additional re-transmission cost of the task. This will be high when more than one task has been sent to the cloud. The same reason for the Fog-Fog offloading scheme, where re-transmission cost between the fog nodes will be less compared with the Fog-Cloud offloading scheme. For the Cost-aware offloading scheme, initially, the total offloading cost is low because the number of tasks is low and the V2I offloading mode has been used. In other words, there is no additional cost because the vehicle is in the coverage area of the MEC. With an increasing number of tasks, the total offloading cost is increased. That means the vehicle utilized the V2V offloading mode for transmitting the task to the target MEC and getting the result. This V2V cost is increased with increasing the hops of V2V transmissions. Meanwhile, our proposed scheme can always achieve the best total offloading cost. The reason is the low cost of data transmission time between the moving vehicle and RSPVs. This means the total offloading cost in this scheme represents the processing cost only.
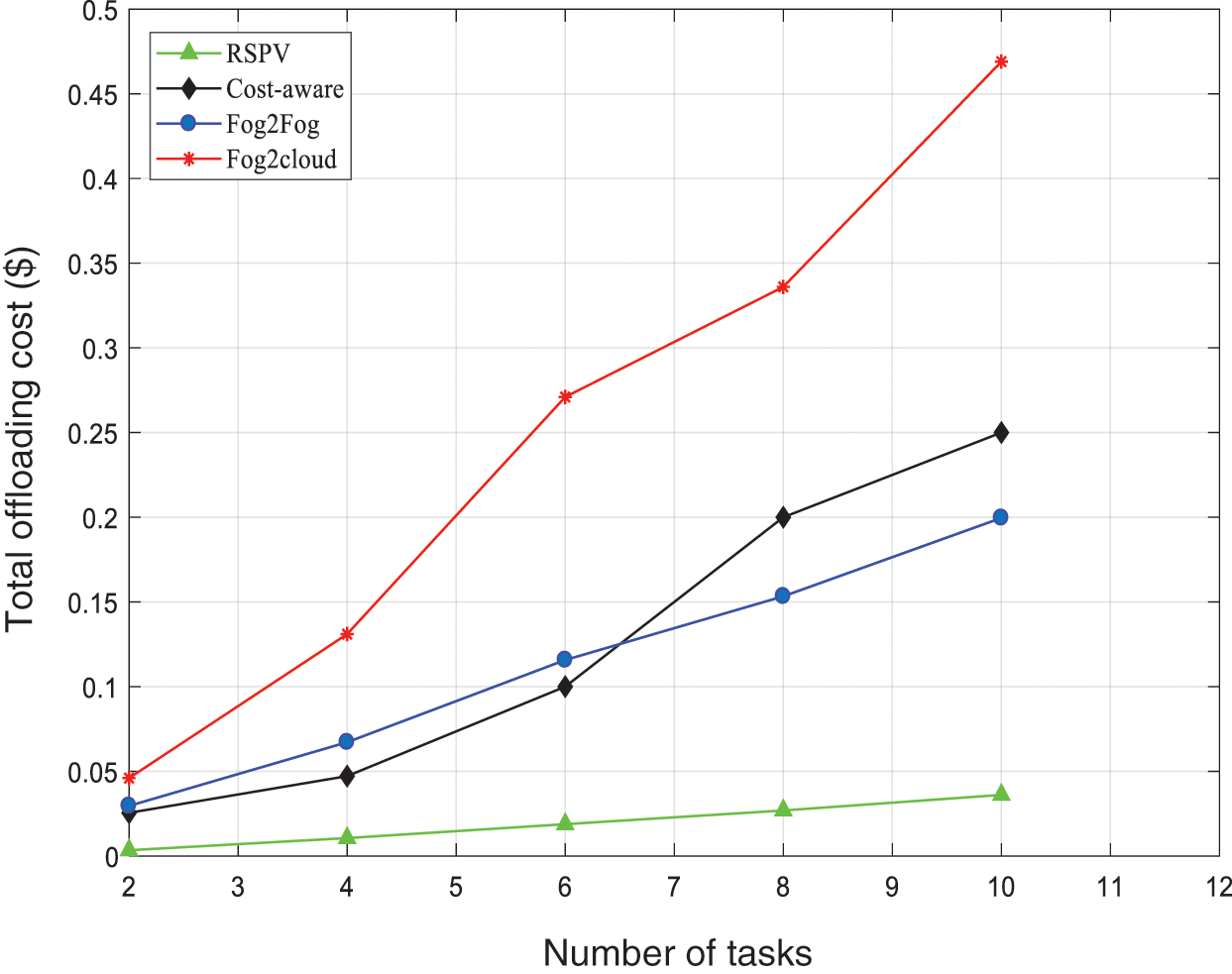
Figure 2: The total offloading cost vs. the number of tasks
Fig. 3 explains the relation between the total offloading cost and the deadline of the task. The deadlines that are used here are 1, 2, 3, 4 and 5 s. From the Figure, it can be seen that the proposed offloading scheme provides a total offloading cost lower than the other schemes when the deadline of the task increases. In other words, the proposed scheme can provide the ability for the fog node to consider the compatibility between the deadline of the task and the suitable offloading cost. Moreover, our proposed scheme becomes cost-effective when the task has a long time (2 s and more). The total offloading cost in the Cost-ware offloading scheme is reduced when the deadline is high (3 s and more). Also, it can be seen that the difference between the costs of the two schemes is small in some deadlines. The reason for that, when the deadline is high this scheme utilizes the V2I offloading mode that has a low transmission cost. Whereas, it utilizes the V2V offloading mode that has a high transmission cost when the deadline is low. In other words, when the deadline is high the vehicle waits to reach the cheaper MEC to use V2I mode instead of V2V mode, because the V2V mode meets the required deadline but with a high transmission cost. As a result, the Cost-aware offloading scheme considers this compatible. Meanwhile, Fog-Fog offloading scheme also considers this compatibility in case there is no more offloading for the neighboring fog nodes which can be seen at 3 s and more. Finally, Fog-Cloud offloading scheme has no consideration for compatibility. So, the total offloading cost has high and low values which are based on re-offloading some or all the tasks to the cloud. The high number of offloaded tasks from moving vehicles to a few RSPVs is the first limitation of this work. That will increase the offloading cost of the offloaded tasks according to the competition between the moving vehicles to get a response from the RSPVs. The second limitation is the big data size of the offloaded tasks that will increase the response time as well as the offloading cost.
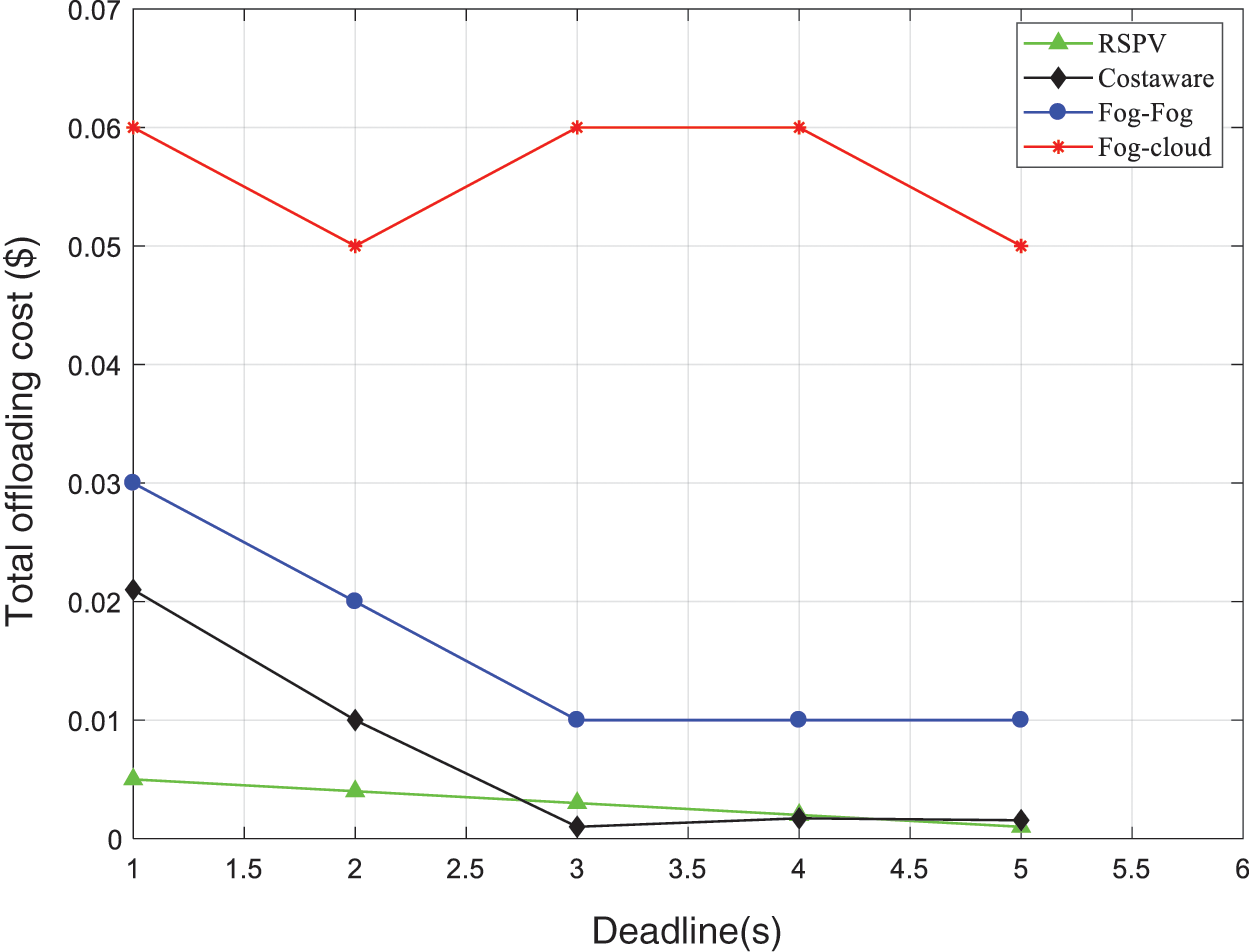
Figure 3: The total offloading cost vs. the deadline
Fig. 4 illustrates the revenue of the three schemes. Here the revenue represents the difference cost between the total budget of the tasks and the total offloading cost. From the Figure, we observe that our offloading scheme has the best revenue in all budgets because of the following reasons: First, the processing cost of the RSPVs will be relatively less because of the low cost of infrastructure and application deployment. Whereas the fog and cloud have a higher processing cost because of their high deployment and maintenance costs. Second, there is no backhaul transmission cost between the RSPVs as in the Fog-Fog and Fog-Cloud schemes which are highly expensive [27]. The Cost-aware offloading scheme did not consider the budget in the characteristic of the task. Therefore, this scheme has not been compared with our proposed scheme in terms of revenue.

Figure 4: The revenue vs. the budget of tasks
In this paper, we proposed the RSPV offloading scheme. In this scheme, the street parked vehicles have been utilized as a computing OLD instead of fog and cloud. In which the RSPVs can share their idle computing resources for executing the offloaded tasks of the moving vehicle (IoV). The simulation results have verified that our proposed offloading scheme can significantly reduce the total offloading cost. Also, it can grant the chance to moving vehicles for selecting the best computing resource that meets the predefined budget and deadline delay of the task. As a result, this offloading scheme is more suitable than the existing conventional offloading schemes. For future work, we plan to extend this work by increasing the number of offloaded tasks and the RSPVs. These tasks can be scheduled and assigned in a fast way to the suitable RSPVs through a centralized offloading process by a controller. Also, we can consider the parking time of the RSPVs to evaluate the performance of the proposed scheme under different conditions.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. X. He, Z. Ren, C. Shi, and J. Fang, “A novel load balancing strategy of software-defined cloud/fog networking in the internet of vehicles,” China Communications, vol. 13, no. Supplement 2, pp. 140–149, 2016. [Google Scholar]
2. J. Du, F. R. Yu, X. Chu, J. Feng and G. Lu, “Computation offloading and resource allocation in vehicular networks based on dual-side cost minimization,” IEEE Transactions on Vehicular Technology, vol. 68, no. 2, pp. 1079–1092, 2019. [Google Scholar]
3. S. Choo, J. Kim and S. Pack, “Optimal task offloading and resource allocation in software-defined vehicular edge computing,” in Int. Conf. on Information and Communication Technology Convergence (ICTC), Jeju, Korea (South2018. [Google Scholar]
4. T. Taleb, S. Dutta, A. Ksentini, M. Iqbal and H. Flinck, “Mobile edge computing potential in making cities smarter,” IEEE Communications Magazine, vol. 55, no. 3, pp. 38–43, 2017. [Google Scholar]
5. O. R. Faten Alenizi, “Dynamically controlling offloading thresholds in fog systems,” Sensors MDPI, vol. 21, no. 7, pp. 2512, 2021. [Google Scholar]
6. A. T. Albu-Salih, S. A. H. Seno and S. J. Mohammed, “Dynamic routing method over hybrid SDN for flying ad hoc networks,” Baghdad Science Journal, vol. 15, no. 3, pp. 361–368, 2018. [Google Scholar]
7. S. A. H. Seno and N. Noorani, “Routing in vanets based on intersection using SDN and fog computing,” in Int. Conf. on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 2018. [Google Scholar]
8. L. A. Phan, D. T. Nguyen, M. Lee, D. H. Park and T. Kim, “Dynamic fog-to-fog offloading in SDN-based fog computing systems,” Future Generation Computer Systems, vol. 117, pp. 486–497, 2021. [Google Scholar]
9. Q. Luo, C. Li, T. H. Luan, W. Shi and W. Wu, “Self-learning based computation offloading for internet of vehicles: Model and algorithm,” IEEE Transactions on Wireless Communications, vol. 20, no. 9, pp. 5913–5925, 2021. [Google Scholar]
10. C. S. RajkumarBuyya, “Cloud computing and emerging IT platforms: Vision, hype, and reality for delivering computing as the 5th utility,” Future Generation Computer Systems, vol. 25, no. 6, pp. 599–616, 2009. [Google Scholar]
11. S. PengfeiHu, “Survey on fog computing: Architecture, key technologies, applications and open issues,” Journal of Network and Computer Applications, vol. 98, pp. 27–42, 2017. [Google Scholar]
12. X. Hou, Y. Li, M. Chen, D. Wu, D. Jin et al., “Vehicular fog computing: A viewpoint of vehicles as the infrastructures,” IEEE Transactions on Vehicular Technology, vol. 65, no. 6, pp. 3860–3873, 2016. [Google Scholar]
13. R. A. Dziyauddin, D. Niyato, N. C. Luong, M. A. M. Izhar, M. Hadhari et al., “Computation offloading and content caching delivery in vehicular edge computing: A survey,” arXiv preprint arXiv:1912.07803, 2019. [Google Scholar]
14. K. Zhang, Y. Mao, S. Leng, S. Maharjan and Y. Zhang, “Optimal delay constrained offloading for vehicular edge computing networks,” in IEEE Int. Conf. on Communications (ICC), Paris, France, 2017. [Google Scholar]
15. S. Liao, J. Li, J. Wu, W. Yang and Z. Guan, “Fog-enabled vehicle as a service for computing geographical migration in smart cities,” IEEE Access, vol. 7, pp. 8726–8736, 2019. [Google Scholar]
16. M. Sookhak, F. R. Yu, Y. He, H. Talebian, N. S. Safa et al., “Fog vehicular computing: Augmentation of fog computing using vehicular cloud computing,” IEEE Vehicular Technology Magazine, vol. 12, no. 3, pp. 55–64, 2017. [Google Scholar]
17. M. Aazam, S. Zeadally and K. A. Harras, “Offloading in fog computing for IoT: Review, enabling technologies, and research opportunities,” Future Generation Computer Systems, vol. 87, pp. 278–289, 2018. [Google Scholar]
18. M. Mukherjee, S. Kumar, C. X. Mavromoustakis and G. Mastorakis, “Latency-driven parallel task data offloading in fog for industrial applications computing networks,” IEEE Transactions on Industrial Informatics, vol. 16, no. 9, pp. 6050–6058, 2020. [Google Scholar]
19. A. Yousefpour, A. Patil, G. Ishigaki, I. Kim, X. Wang et al., “QoS-Aware dynamic fog service provisioning,” arXiv preprint, arXiv:1802.00800,available online: https://arxiv.org/abs/1802.00800 (2018). [Google Scholar]
20. A. B. Reis, S. Sargento and O. K. Tonguz, “Parked cars are excellent roadside units.,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 9, pp. 2490–2502, 2017. [Google Scholar]
21. Z. He, D. Zhang and J. Liang, “Cost-efficient sensory data transmission in heterogeneous software-defined vehicular networks,” IEEE Sensors Journal, vol. 16, no. 20, pp. 7342–7354, 2016. [Google Scholar]
22. L. Gu, D. Zeng, S. Guo, A. Barnawi and Y. Xiang, “Cost efficient resource management in fog computing supported medical cyber-physical system,” IEEE Transactions on Emerging Topics in Computing, vol. 5, no. 1, pp. 108–119, 2017. [Google Scholar]
23. K. Zhang, Y. Mao, S. Leng, Y. He and Y. Zhang, “Mobile-edge computing for vehicular networks: A promising network paradigm with predictive off-loading,” IEEE Vehicular Technology Magazine, vol. 12, no. 2, pp. 36–44, 2017. [Google Scholar]
24. X. Q. Pham, T. D. Nguyen, V. Nguyen and E. N. Huh, “Joint node selection and resource allocation for task offloading in scalable vehicle-assisted multi-access edge computing,” Symmetry, vol. 11, no. 1, pp. 1–17, 2019. [Google Scholar]
25. L. Liu, Z. Chang, X. Guo, S. Mao and T. Ristaniemi, “Multiobjective optimization for computation offloading in fog computing,” IEEE Internet of Things Journal, vol. 5, no. 1, pp. 283–294, 2018. [Google Scholar]
26. M. LiWang, S. Dai, Z. Gao, X. Du, M. Guizani et al., “A computation offloading incentive mechanism with delay and cost constraints under 5G satellite-ground IoV architecture,” IEEE Wireless Communications, vol. 26, no. 4, pp. 124–132, 2019. [Google Scholar]
27. L. Li, H. Zhou, S. X. Xiong, J. Yang and Y. Mao, “Compound model of task arrivals and load-aware offloading for vehicular mobile edge computing networks,” IEEE Access, vol. 7, pp. 26631–26640, 2019. [Google Scholar]
28. K. Wang, Z. Hu, Q. Ai, Y. Zhong, J. Yu et al., “Joint offloading and charge cost minimization in mobile edge computing,” IEEE Open Journal of the Communications Society, vol. 1, pp. 205–216, 2020. [Google Scholar]
29. L. Aminizadeh and S. Yousef, “Cost minimization scheduling for deadline constrained applications on vehicular cloud infrastructure,” in Int. Conf. on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 2014. [Google Scholar]
30. A. A. Khadir and S. A. H. Seno, “SDN-Based offloading policy to reduce the delay in fog-vehicular networks,” Peer-to-Peer Networking and Applications, vol. 14, pp. 1261–1275, 2021. [Google Scholar]
31. V. G. Menon, “Moving from vehicular cloud computing to vehicular fog computing: Issues and challenges,” International Journal of Computer Science and Engineering, vol. 9, no. 2, pp. 14–18, 2017. [Google Scholar]
32. Y. Cui, Y. Liang and R. Wang, “Resource allocation algorithm with multi-platform intelligent offloading in d2d-enabled vehicular networks,” IEEE Access, vol. 7, pp. 21246–21253, 2019. [Google Scholar]
33. N. Liu, M. Liu, G. Chen and J. Cao, “The sharing at roadside: Vehicular content distribution using parked vehicles,” in proceedings IEEE INFOCOM, Orlando, FL, USA, 2012. [Google Scholar]
34. X. Guo, L. Liu, Z. Chang and T. Ristaniemi, “Data offloading and task allocation for cloudlet-assisted ad hoc mobile clouds,” Wireless Networks, vol. 24, pp. 79–88, 2018. [Google Scholar]
35. R. Deng, R. Lu, C. Lai, T. H. Luan and H. Liang, “Optimal workload allocation in fog-cloud computing toward balanced delay and power consumption,” IEEE Internet of Things Journal, vol. 3, no. 6, pp. 1171–1181, 2016. [Google Scholar]
36. A. Yousefpour, G. Ishigaki, R. Gour and J. P. Jue, “On reducing iot service delay via fog offloading,” IEEE Internet of Things Journal, vol. 5, no. 2, pp. 998–1010, 2018. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools