DOI:10.32604/csse.2023.024864
| Computer Systems Science & Engineering DOI:10.32604/csse.2023.024864 | |
| Article |
Joint Energy Predication and Gathering Data in Wireless Rechargeable Sensor Network
1Department of Computer Science and Engineering, PET Engineering College, Vallioor, 627117, India
2Department of Computer Science and Engineering, VV College of Engineering, Thisayanvilai, 627657, India
*Corresponding Author: I. Vallirathi. Email: vallirathipaper2021@gmail.com
Received: 02 November 2021; Accepted: 24 January 2022
Abstract: Wireless Sensor Network (WSNs) is an infrastructure-less wireless network deployed in an increasing number of wireless sensors in an ad-hoc manner. As the sensor nodes could be powered using batteries, the development of WSN energy constraints is considered to be a key issue. In wireless sensor networks (WSNs), wireless mobile chargers (MCs) conquer such issues mainly, energy shortages. The proposed work is to produce an energy-efficient recharge method for Wireless Rechargeable Sensor Network (WRSN), which results in a longer lifespan of the network by reducing charging delay and maintaining the residual energy of the sensor. In this algorithm, each node gets sorted using the K-means technique, in which the data gets distributed into various clusters. The mobile charges execute a Short Hamiltonian cycle opposite direction to reach each cluster’s anchor point. The position of the anchor points is calculated based on the energy distribution using the base station. In this case, the network will act as a spare MC, so that one of the two MCs will run out of energy before reaching the BS. After the current tours of the two MCs terminate, regression analysis for energy prediction initiates, enabling the updating of anchor points in the upcoming round. Based on the findings of the regression-based energy prediction model, the recommended algorithm could effectively refill network energy.
Keywords: WSNs; MCs; WRSN; K-means algorithm; shortest hamiltonian cycle; regression analysis
Wireless sensor networks are composed of networks of geographically distant and customized sensors that monitor and capture environmental factors before sending the data to a central location. Data can be gathered, evaluated, stored, and collected using WSNs. As a result, a wireless rechargeable sensor network (WRSN), a WSN with battery recharging capacity, has evolved as one of the warm places in ongoing WSN studies. Wireless chargers are required to power the sensors’ batteries in a WRSN [1,2]. It is possible to charge with either a fixed charger or an MC with a wireless charger. WSNs with wireless chargers to recharge nodes can be called rechargeable sensor networks (WRSNs). WRSNs, by contrast to energy predicting technology, maintain networks operational also while controlling the charging process. As a result, the lifespan of WRSNs is projected to be infinite [3].
Angelopoulos et al. has suggested a set of energy-saving features of the new Wireless Rechargeable Sensor Networks (WRSNs) paradigm, where a mobile charger travels through a WSN and distributes power to sensor motes wirelessly. As the network evolves, the capacity to add power to the network will likely enhance the power of the model; however, to fully utilize the potential benefits and detect the extent of future improvements, an analysis of alternative charging process configurations will be necessary [4].
Angurala et al. (2020) had proposed energy collecting techniques and eventually discovered the most efficient approach for charging WSN nodes, which was communication load balance (CLB). The CLB approach, which employs the concepts of charging and load balancing, aids in extending the lifetime of a network. Then, by executing [5], several modulation techniques are examined.
Han et al. presented a mobile charging algorithm according to the WRSNs having imbalanced clustering. A method for planning charging paths and a heterogeneous clustering strategy are provided to reduce node mortality to the greatest extent possible. Furthermore, intra-cluster nodes are charged via energy relay transmission technology [6].
Wei et al., to extend the network’s longevity and efficacy, designed a multi-objective path planning technique that maximizes the network’s estimated rest of the lifetime and data collection. We suggest a multi-objective discrete fireworks technique according to the grid for the issue model, which outperforms existing techniques [7].
As part of our proposed algorithm, the mobile charger had infinite power. MCs have yet to reach their full potential. Data collection on mobile devices and wireless charging can take place simultaneously. Accordingly, residual rechargeable energy consumption is based on the positioning anchor point for a cluster-based sensor network. For this purpose, regression analysis is employed. In each cluster, the goal of our approach is to find the best anchor point.
Our contributions are given below:
• We proposed network architecture. The anchor point for such an MC to energy utilization and data gathering is located on the cluster’s network.
• The main purpose of the K-means algorithm is to produce compacted clusters with cluster members that are close to one another.
• When deciding which anchor locations to visit, we take into account the sensor’s available energy levels as well as the MC’s travel tour length.
• Provide the MC with the shortest Hamiltonian cycle-based travel plan, and it will be able to collect the data efficiently. We improve the long duration of the energy and data collection by using regression analysis.
The paper is sorted out as per the following: Network architecture is shown in Section 2. The network models are detailed in Section 3. The simulation results and analysis are performed in Section 4. The conclusion is set in Section 5. As a final point, the references are listed in Section 6.
The following Tab. 1 shows the details of the network model that we explored in this section:
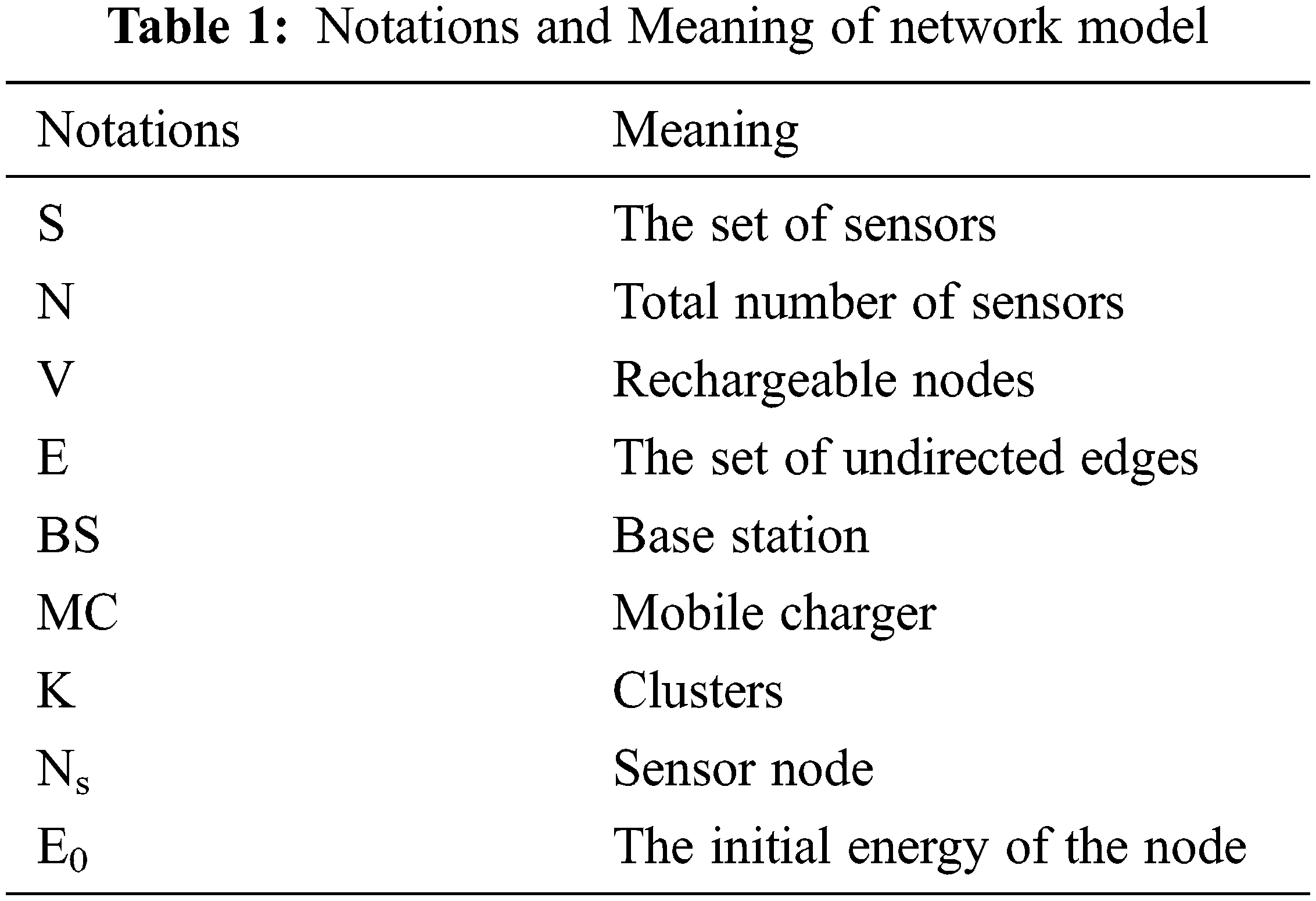
A network design based on nodes that organize into clusters and transmit data to the cluster head via multi-hops and time division is proposed. According to regression analysis, the network cluster has the anchor point for the MC to recharge energy and gather data [8,9]. Before replacing its batteries, the MC sends the data collected to the BS. An MC will contact the BS if it runs out of energy during the tour, and another MC will be sent to complete the charging operation. G= (V, E). Fig. 1 shows the network architecture.

Figure 1: Network architecture
The network model and the different algorithms are explained as follows,
When in comparison to the charging period, the time spent by the MC moving from one sensor to the next is regarded to be quite short. We estimate that the charging time for each sensor is the same regardless of its battery status.

3.2 K-Means Clustering Algorithm
As part of data collection, the MC [10] contacts a minimal cluster to collect each piece of information made in the network. Therefore, each cluster’s area must increase substantially to achieve complete coverage with a limited number of clusters. As a result, the radius of each cluster should not exceed an MC’s charging range. To partition nodes into groups, we used the K-means algorithm.

The corresponding respective cluster greedily transfers data to the cluster head after identifying the cluster head in a cluster. That is, a node selects the cluster head’s nearest neighbor as its upcoming hop node. Fig. 2 Cluster generated by K-means algorithm.

Figure 2: Cluster generated by K-means algorithm
Because the energy condition of each sensor in a wireless recharging sensor network varies at different times, it is better to recharge as many sensors as possible with the least amount of energy to ensure the sensor’s everlasting functionality [11–14]. Fig. 3 shows the anchor point selection. We evaluate the rest of the energy levels of the sensor and the MC’s traveling tour length when calculating the sequence of anchor locations to visit according to these observations. The examples are given below.


Figure 3: Anchor point selection
The analysis takes place on a sensor network N that is dispersed over a two-dimensional area [15], which is a situation that is quite common. Every sensor node is charged and has a maximum storage capacity of Emax. Emin is also the lowest energy-consuming battery in a sensor node. Each sensor node I, I N produces data at a rate of Ri (in bits per second). The primary connect node for all data acquired by the sensor network is a fixed base station (BS). MCs are used to charge batteries at each sensor node in the network. The MC starts at a gas station and travels at a speed of V (in meters per second). Whenever it reaches node I, it will use non-radiative energy, transfer to wirelessly charge the node’s battery. U is the energy transfer rate of the MC. Vacation time (abbreviated as tvac) refers to this time of rest. The MC starts at O (O S), visits and charges all nodes ni (ni S), and then returns to O for a given collection of nodes S. Pk denotes the shortest Hamiltonian cycle’s trip path. Pk’s length is Dk, and the time it takes to go that distance is tP = Dk/V. T is the length of an MC trip cycle, and tvac is MC’s vacation time in the kth cycle.
where jFk tj is the entire length of duration that MC is using non-radiative energy transfer to charge all nodes in Fk.

3.5 Predicting Energy Consumption by Regression Analysis
The regression analysis in Fig. 4 determines the relationship among two variables. It tends to determine what’s going on among two variables. Regression analysis aims to fit a predicted model to a set of known y and X variables. Since the value of X is given without the corresponding value of y, the model can be expressed as:

Figure 4: Regression analysis
The model is expressed as follows if the regression is logarithmic.
The simple linear regression in given as,
The estimators 1 of 1 and 0 of 0 are generated by the following equations given a data set of n pairs (y1; x1),…,(yn; xn):
Thus, the empirical mean of xi can be written as

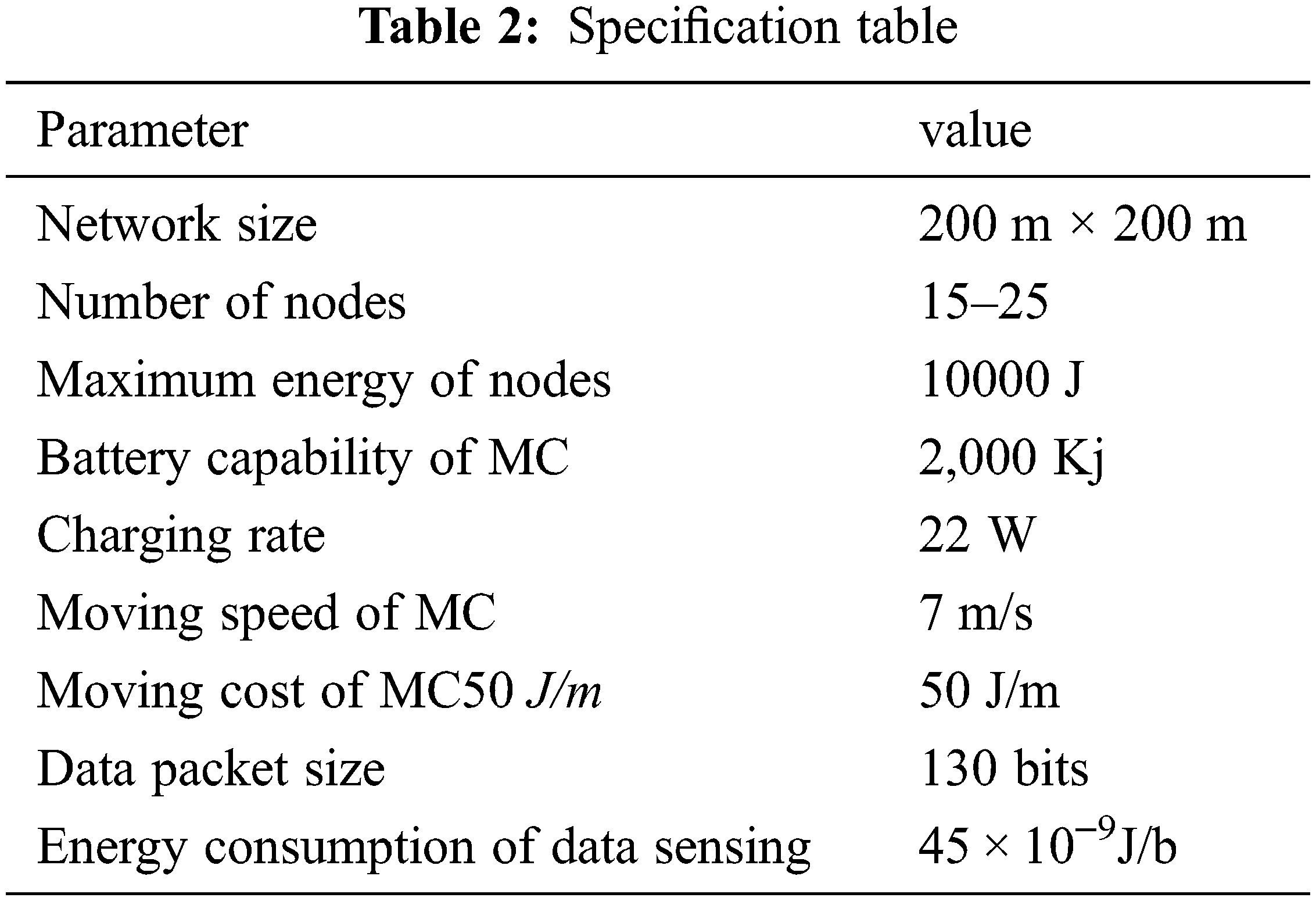
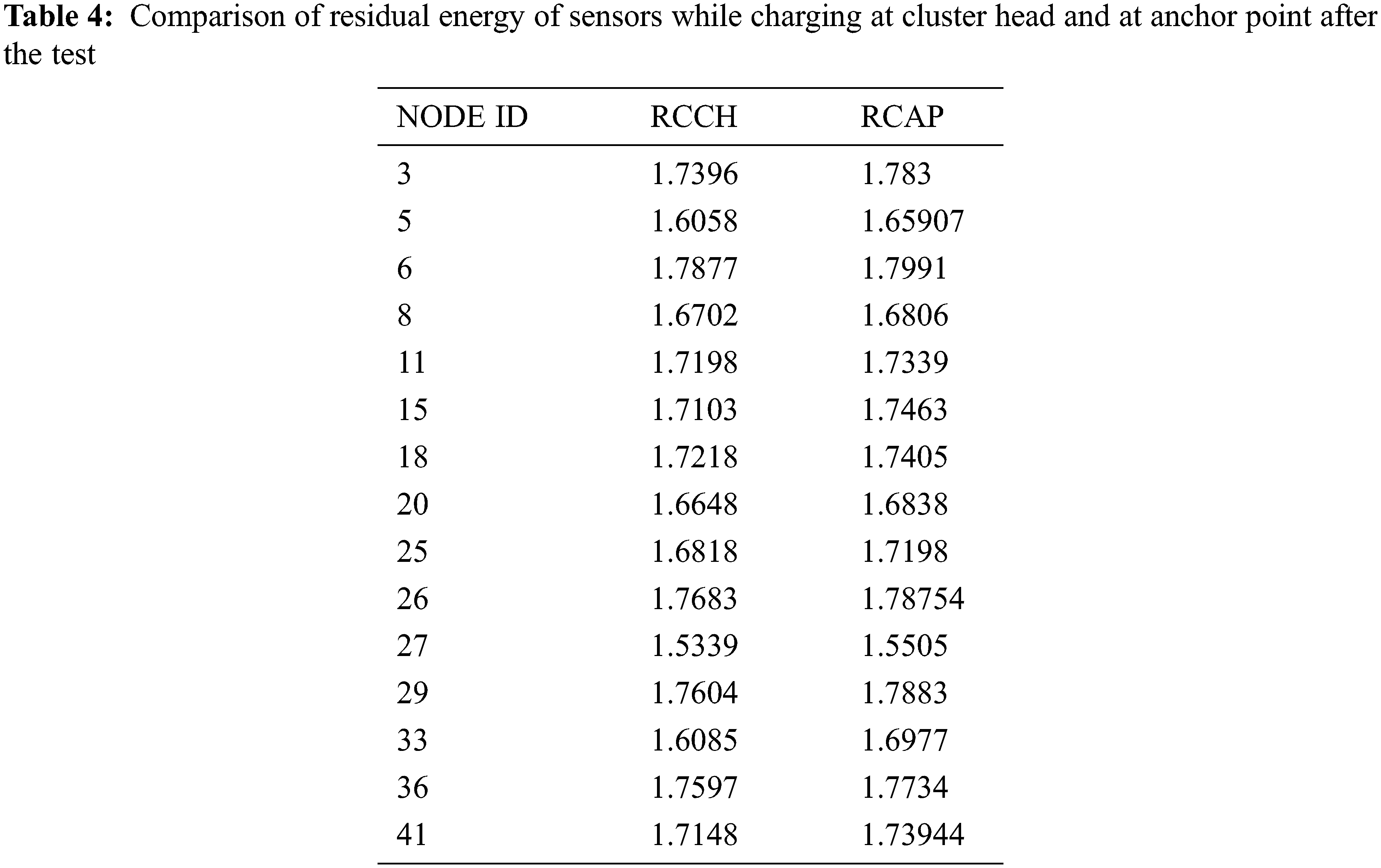
Specification table is in Tab. 2 and the comparison of residual energy of sensors while charging at cluster head and at the anchor point and after the test are tabulated Tabs. 3 and 4 respectively.
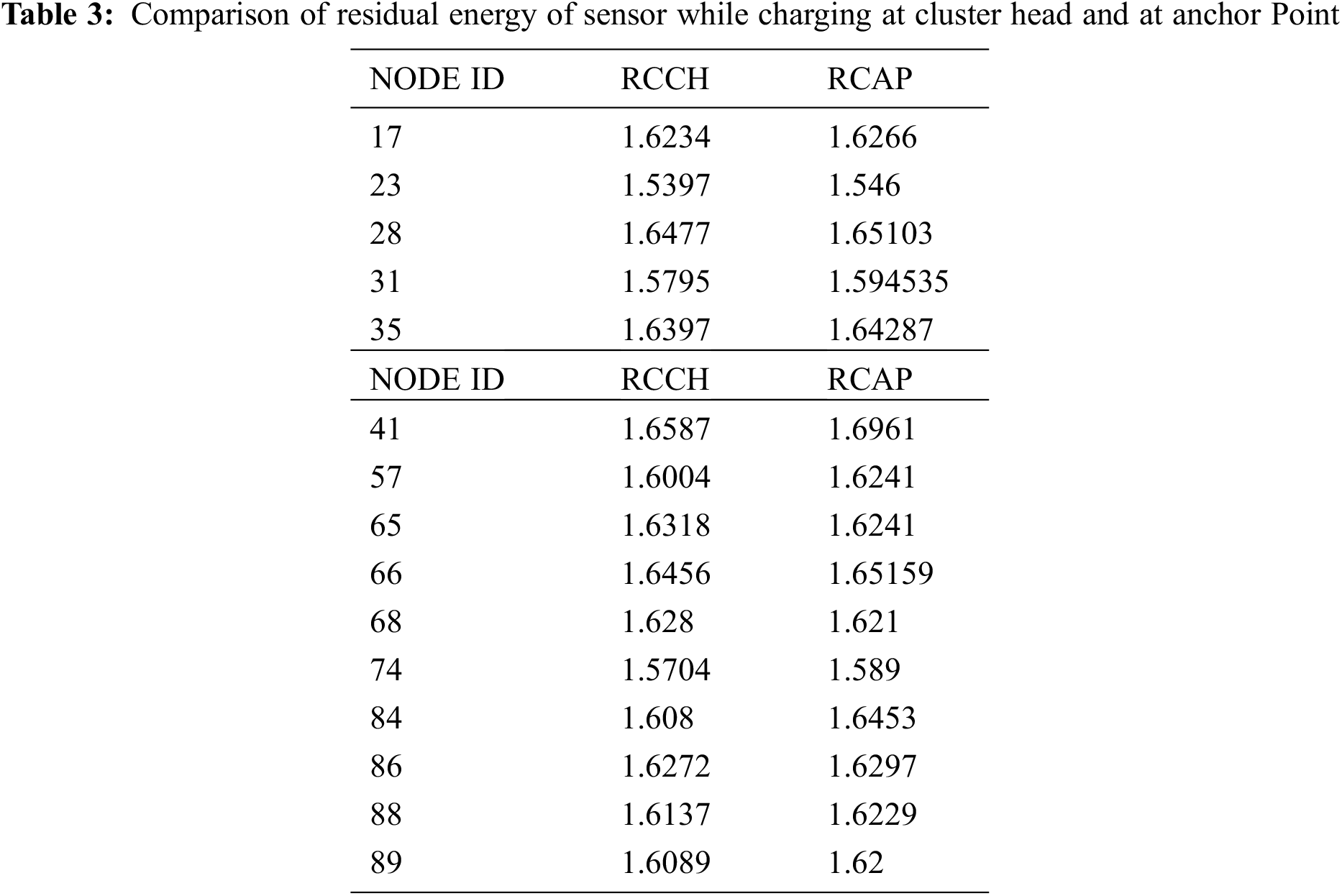
When an MC came to a halt near the cluster head and anchor point for charging, the leftover power of the nodes in three clusters was presented in the following figure. The outcomes of the test were done in clusters 3, 6, and 11, denoted by the letters k = 1, k = 8, and k = 12, respectively. For that period, the MC was charged to the anchor point and cluster head to assure the accuracy of the results. Furthermore, every cluster’s node had the same remaining energy and the comparison of residual energy of sensor while powering at cluster head and at anchor point is shown in Fig. 5.

Figure 5: Comparison of residual energy of sensor while powering at cluster head and at the anchor point
From Fig. 6, It is clearly stated that the reported energy consumption is comparatively higher than the real energy consumption and the values of k are also evaluated from Fig. 7.

Figure 6: Comparison of residual energy of sensors while charging at cluster head and at the anchor point

Figure 7: The variations between the reported energy consumption and the real energy consumption
In this paper, the suggested work is to produce an energy-efficient recharge method for WRSN, which results in a longer duration of networks by reducing powering delay and maintaining the residual energy of the sensor. Using the K-means technique, group the nodes into multiple clusters. The two MCs use a Shortest Hamiltonian cycle in the opposite direction to reach the anchor point in every node. Anchor points are calculated based on the energy distribution at the base station. If either of the two MCs runs out of energy before reaching the BS. Regression analysis for energy prediction is assumed when the current tour of the two MCs is completed, allowing the anchor sites to be revised in the next round. According to the modeling results, the regression-based energy forecast model is extremely accurate, and the recommended approach may efficiently refill network energy. The Simulation results have shown that the semi-Markov-based energy prediction model is highly accurate. The proposed algorithm can replenish energy for the network efficiently.
Acknowledgement: The authors with a deep sense of gratitude would thank the supervisor for his guidance and constant support rendered during this research.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. A. Amin, X. H. Liu, M. A. Saleem, S. Henna, T. U. Islam et al., “Collaborative wireless power transfer in wireless rechargeable sensor networks,” Wireless Communications and Mobile Computing, vol. 2020, pp. 1–13, 2020. [Google Scholar]
2. X. Liu, M. S. Obaidat, C. Lin, T. Wang and A. Liu, “Movement-based solutions to energy limitation in wireless sensor networks: State of the art and future trends,” IEEE Network, vol. 35, no. 2, pp. 188–193, 2021. [Google Scholar]
3. Z. Lu, B. Fan, J. Cai and L. Tang, “J-RCA: A joint routing and charging algorithm with WCE assisted data gathering in wireless rechargeable sensor networks,” IEEE Sensors Journal, vol. 21, no. 3, pp. 3888–3899, 2021. [Google Scholar]
4. C. M. Angelopoulos, S. Nikoletseas, T. P. Raptis, C. Raptopoulos and F. Vasilakis, “Efficient energy management in wireless rechargeable sensor networks,” in Proc. ACM Int. Conf. on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Paphos, Cyprus, pp. 309–316, 2012. [Google Scholar]
5. M. Angurala, M. Bala and S. S. Bamber, “Energy efficient CLB approach to find optimum modulation scheme in wireless rechargeable sensor networks,” International Journal of Information Technology, vol. 13, no. 1, pp. 269–276, 2021. [Google Scholar]
6. G. Han, X. Yang, L. Liu and W. Zhang, “A joint energy replenishment and data collection algorithm in wireless rechargeable sensor networks,” IEEE Internet of Things Journal, vol. 5, no. 4, pp. 2596–2604, 2017. [Google Scholar]
7. Z. Wei, L. Wang, Z. Lyu, L. Shi, M. Li et al., “A Multi-objective algorithm for joint energy replenishment and data collection in wireless rechargeable sensor networks,” in Proc. Int. Conf. on Wireless Algorithms, Systems and Applications, Nanjing, China, pp. 497–508, 2018. [Google Scholar]
8. X. Cao, W. Xu, X. Liu, J. Peng and T. Liu, “A deep reinforcement learning-based on-demand charging algorithm for wireless rechargeable sensor networks,” Ad Hoc Networks, vol. 110, pp. 102278, 2021. [Google Scholar]
9. Z. Wei, C. Xia, X. Yuan, R. Sun, Z. Lyu et al., “The path planning scheme for joint charging and data collection in WRSNs: A multi-objective optimization method,” Journal of Network and Computer Applications, vol. 156, pp. 102565, 2020. [Google Scholar]
10. W. Ouyang, X. Liu, M. Obaidat, C. Lin, H. Zhou et al., “Utility-aware charging scheduling for multiple mobile chargers in large-scale wireless rechargeable sensor networks,” IEEE Transactions on Sustainable Computing, vol. 1, pp. 1–11, 2020. [Google Scholar]
11. C. Xu, R. H. Cheng and T. K. Wu, “Wireless rechargeable sensor networks with separable charger array,” International Journal of Distributed Sensor Networks, vol. 14, no. 4, pp. 15, 2018. [Google Scholar]
12. K. Liu, J. Peng, L. He, J. Pan, S. Li et al., “An active mobile charging and data collection scheme for clustered sensor networks,” IEEE Transactions on Vehicular Technology, vol. 68, no. 5, pp. 5100–5113, 2019. [Google Scholar]
13. N. Gharaei, Y. D. A. Otaibi, S. Rahim, H. J. Alyamani, N. A. K. K. Khani and S. J. Malebary, “Broker-based nodes recharging scheme for surveillance wireless rechargeable sensor networks,” IEEE Sensors Journal, vol. 21, no. 7, pp. 9242–9249, 2021. [Google Scholar]
14. P. Zhou, C. Wang and Y. Yang, “Design of self-sustainable wireless sensor networks with energy harvesting and wireless charging,” ACM Transactions on Sensor Networks, vol. 17, no. 4, pp. 1–38, 2021. [Google Scholar]
15. J. R. Jiang, Y. C. Chen and T. Y. Lin, “Particle swarm optimization for charger deployment in wireless rechargeable sensor networks,” International Journal of Parallel, Emergent and Distributed Systems, vol. 36, no. 6, pp. 652–667, 2021. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |