DOI:10.32604/csse.2021.016475
| Computer Systems Science & Engineering DOI:10.32604/csse.2021.016475 | |
| Article |
Output Feedback Robust H∞ Control for Discrete 2D Switched Systems
1School of Electronic Information and Engineering, Changchun University of Science and Technology, Changchun, 130000, China
2Department of Computer Science and Engineering, University of California, Riverside, CA92521, USA
*Corresponding Author: Yang Yang. Email: cloneyang@126.com
Received: 03 January 2021; Accepted: 17 February 2021
Abstract: The two-dimensional (2-D) system has a wide range of applications in different fields, including satellite meteorological maps, process control, and digital filtering. Therefore, the research on the stability of 2-D systems is of great significance. Considering that multiple systems exist in switching and alternating work in the actual production process, but the system itself often has external perturbation and interference. To solve the above problems, this paper investigates the output feedback robust H∞ stabilization for a class of discrete-time 2-D switched systems, which the Roesser model with uncertainties represents. First, sufficient conditions for exponential stability are derived via the average dwell time method, when the system’s interference and external input are zero. Furthermore, in the case of introducing the external interference, the weighted robust H∞ disturbance attenuation performance of the underlying system is further analyzed. An output feedback controller is then proposed to guarantee that the resulting closed-loop system is exponentially stable and has a prescribed disturbance attenuation level γ. All theorems mentioned in the article will also be given in the form of linear matrix inequalities (LMI). Finally, a numerical example is given, which takes two uncertain values respectively and solves the output feedback controller’s parameters by the theorem proposed in the paper. According to the required controller parameter values, the validity of the theorem proposed in the article is compared and verified by simulation.
Keywords: 2-D systems; robust H∞ control; LMI; output feedback; switched systems; Roesser model
The issue of stability analysis and controller synthesis is a hot research topic. Reference Medvedeva et al. [1–3] investigated the stability of one-dimensional (1-D) continuous-time or discrete-time systems. Considering the complexity of many manufacturing processes and physical phenomena, a 2-D continuous-time or discrete-time system that depends on two independent variables has its irreplaceable application area. 2-D systems have attracted considerable research attention in control theory and practice over the past few decades due to their wide applications. Reference Du et al. [4–7] showed multi-dimensional digital filtering, linear image processing, signal processing, and process control. Different models such as the Roesser model and Fornasini–Marchesini model can represent 2-D systems, and the stability issues concerning these two models can be found [8,9].
On the other hand, considerable interest has been devoted to the research of switched systems during the recent decades. A switched system comprises a family of subsystems described by continuous or discrete-time dynamics and a switching law that specifies the active subsystem at each instant of time. The switching strategy improves control performance [10–13] and arise many engineering applications, such as in motor engine control, constrained robotics, and satellite image control systems [14]. As far as time-dependent switching is concerned, the average dwell time (ADT) switching is employed in most references owing to its flexibility [15,16].
However, perturbations and uncertainties widely exist in practical systems. In some cases, the perturbations can be merged into the disturbance, which can be bounded in the appropriate norms. The main advantage of robust H∞ control is that its performance specification considers the system’s worst-case performance in terms of energy gain. This is more appropriate for system robustness analysis and robust control under modeling disturbances than other performance specifications. Recently, the problems of robust H∞ control and filtering for 2-D systems have been studied by many researchers [17–20], and so do the same problems of switched systems [21–23]. However, to the best of our knowledge, the output feedback robust H∞ control problem of 2-D switched systems in the Roesser model with uncertainties has not yet been thoroughly investigated, which motivates this present study.
In this paper, we confine our attention to the robust H∞ control problem of discrete 2-D switched systems described by the Roesser model with uncertainties. The main theoretical contributions are threefold: (1) We contribute to the development of stabilization for a class of 2-D switched systems that are exponentially stable, which the Roesser model with uncertainties represents. (2) A sufficient condition is presented to ensure a 2-D switched system’s exponential stability at a given disturbance attenuation level robust weighted H∞. (3) Based on the above two points, this article further designs the output feedback controller of the closed-loop system.
The paper is organized as follows. According to the current research results, we first study the exponential stability of 2-D switched systems described by the Roesser model with uncertainties. Further, when the system contains perturbations, we analyze the robust H∞ performance index of the system. Finally, we design an output feedback controller for the open-loop system, and an example is given to illustrate the effectiveness of the proposed method.
The following notations are used throughout the paper: the superscript “T” denotes the transpose, and the notation X ≥ Y (X > Y) means that matrix X − Y is positive semi-definite (positive definite, respectively).
3 Problem Formulation and Preliminaries
The uncertain Roesser model for a 2-D switched system
with
where
The boundary condition satisfies:
It is easy to know from the above formula
Remark 1. “In this paper, it is assumed that switching occurs only at each sampling point of k or l. The switching sequence can be described as
with
Definition 1. System (1) is said to be exponentially stable under
holds for all D ≥ j [26].
Remark 2. From Definition 1, it is easy to see that when j is given,
Definition 2. For a given scalar
(1) when
(2) under the zero-boundary condition, we have
where 0 <
Definition 3. For any
holds for given
Lemma 1. For a given matrix
Lemma 2. Assuming that
Proof.
4 Exponential Stability Analysis
This section focuses on the exponential stability analysis of the 2D switched systems. The following theorem presents sufficient conditions that can guarantee that system (1) is exponentially stable.
Theorem 1. Consider 2D discrete switched system (1) with
Then, the system is exponentially stable for any switching signal with the average dwell time satisfying
where
Proof. Without loss of generality, we assume that the ith subsystem is active. For the ith subsystem, we consider the following Lyapunov function candidate:
where
Using Lemma 1 to (8), we can get the equivalent inequality as follows:
Then using Lemma 2 to (13), we can get
Using Lemma 1 to (14), we can get
Form (15), we know
The equality holds only if
It follows from (16) that
Now, let n =
Using (11) and (12), at switching instant
Also, according to Definition 3, it follows that
Therefore, the following inequality can be obtained easily:
Combining (20), inequality (21) can be written as follows:
There exist two positive constants a and b (a ≤ b) such that
By Definition 1, we know that if
The proof is completed.
Remark 3. Note that when
5 Robust H∞ Performance Analysis
This section focuses on the Robust H∞ stabilization problem for a class of discrete-time 2D switched systems represented by a Roesser model with uncertainties. The following theorem presents sufficient conditions that can guarantee that system (1) is exponentially stable and has a prescribed weighted H∞ disturbance attenuation level
Theorem 2. For given positive scalars
Then, 2D switched system (1) is exponentially stable and has a prescribed weighted H∞ disturbance attenuation level
Proof. It is an obvious fact that (24) implies that inequality (8) holds. By Lemma 2, we can find that system (1) is exponentially stable when
To establish the weighted H∞ performance, we choose the same Lyapunov functional candidate as in (12) for the system (1). Following the proof line of Theorem 1, we can get
if
Using Lemma 1 to (26), we can get the equivalent inequality as follows:
Pre- and post-multiplying (24) by
Using Lemma 1 to (28), we can get
Then using Lemma 2, we find that (29) is equivalent to (27).
Thus it can be obtained from (24) that
Then we have
Let
Summing up both sides of (31) from (D-1) to 0 with respect to l and 0 to (D-1) with respect to k, respectively, and applying the zero-boundary condition, one gets
Under the zero-initial condition, we have
Thus, we have
Multiplying both sides of (35) by
Noting
Thus
According to Definition 3, we can see that system (1) is exponentially stable and has a prescribed weighted robust H∞ disturbance attenuation level γ.
The proof is completed.
This subsection will deal with the Robust H∞ control problem of 2D switched systems via dynamic output feedback. Our purpose is to design a dynamic output feedback controller such that the closed-loop system is exponentially stable and has a specified robust weighted H∞ disturbance attenuation level γ.
Consider the following discrete 2D switched systems in the Roesser model with uncertainties:
where
Introduce the following output feedback controller of order
where
The closed-loop system consisting of the plant (39) and the controller (40) is of the form
with
where
For the closed-loop system (41), we state the 2D Robust H∞ control problem as finding a 2D dynamic output feedback controller of the form in (40) for the 2D systems (39) such that the closed-loop system (41) has a specified weighted robust H∞ disturbance attenuation level γ. The controller design procedure is provided in the following theorem.
Theorem 3. For given positive scalars
with
then 2D switched closed-loop system (41) is exponentially stable and has a prescribed weighted robust H∞ disturbance attenuation level γ for any switching signals with the average dwell time satisfying
where
and the controller parameters can be obtained as follows:
Proof. Given Theorem 2 to the closed-loop system (41), the controller solves the 2D switched robust H∞ control problem if the following matrix inequalities hold
Pre- and post-multiplying (47) by
Definite
Partition
It is easy to show from (50) that
set
Then it follows that
Pre- and post-multiplying (49)
with
then we take
The condition (42) can be obtained.
Remark 4. It is worth noting that in Theorems 1 and 2, the results are derived from the assumption that the switching rule is not known a priori, but its value is available in each sampling period. In other words, the switching sequence considered here does not include the random switching one.
In what follows, we present an algorithm for the design of a dynamic output controller.
Algorithm 1
Step 1. Given
Step 2. The invertible matrices
Step 3. The invertible matrices
Step 4. By solving inequality (45), the constant
Step 5. By solving (46), the remaining controller parameters
This completes the proof.
Remark 5. If there is only one subsystem in the system (39), it will degenerate into being a general 2D Roesser model, which is a special model of 2D switched systems. Theorem 3 is also applicable for 2D Roesser systems, which means that our results are more general than that just for 2D Roesser systems.
In this section, we shall illustrate the results developed earlier via an example.
Subsystem 1
Subsystem 2
Taking
Then,
The positive scalar
can be obtained from (44). And the rest of the controller parameters
Choosing
and
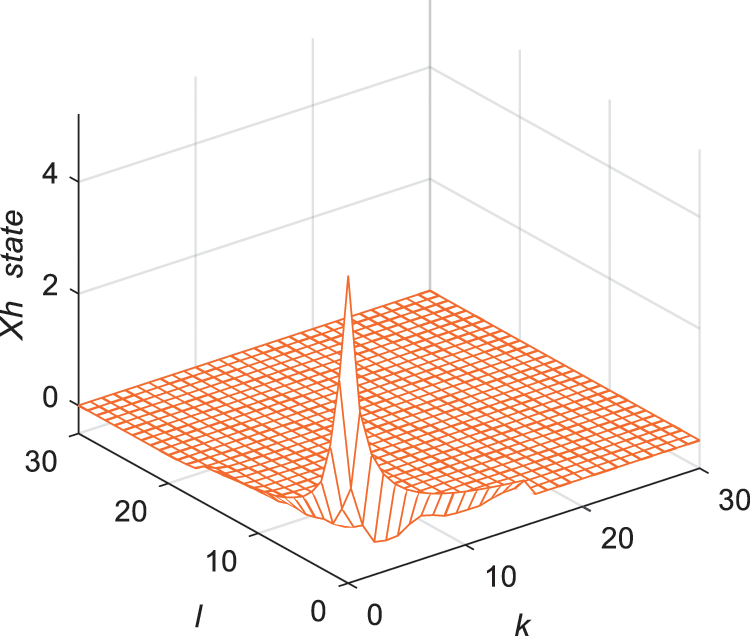
Figure 1: Response of state
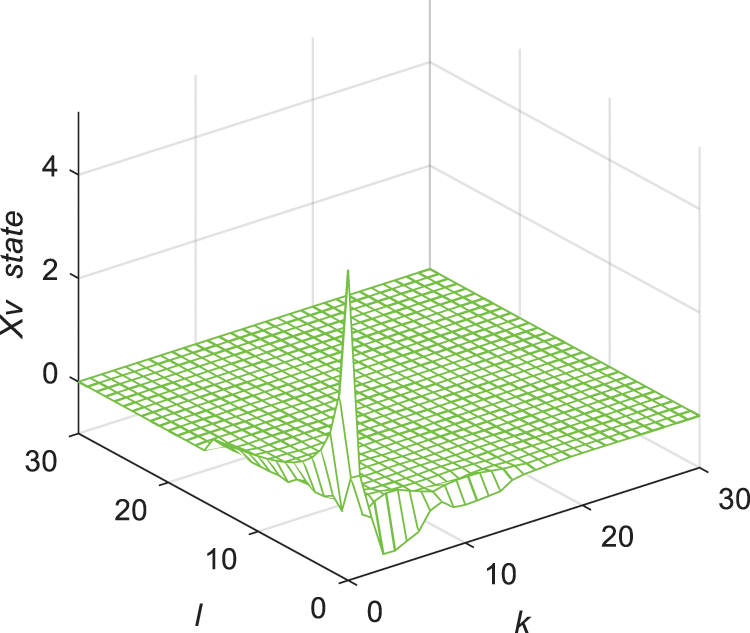
Figure 2: Response of state
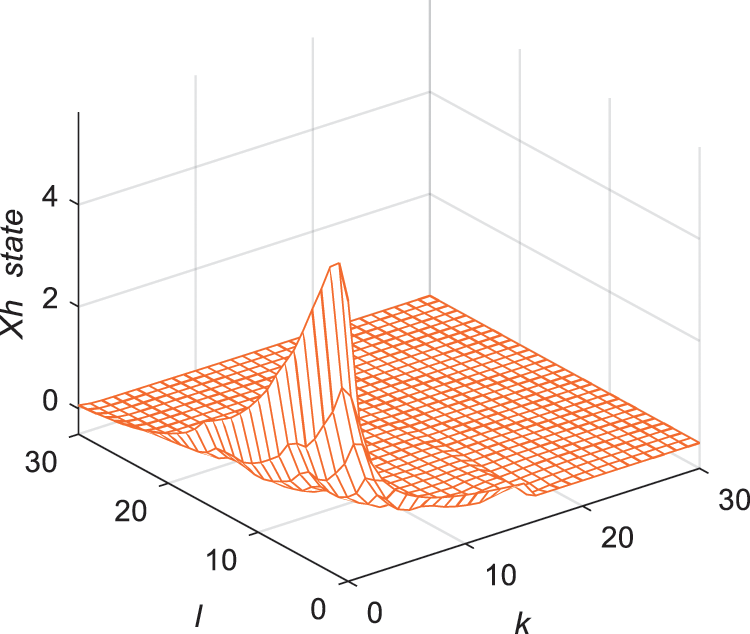
Figure 3: Response of state
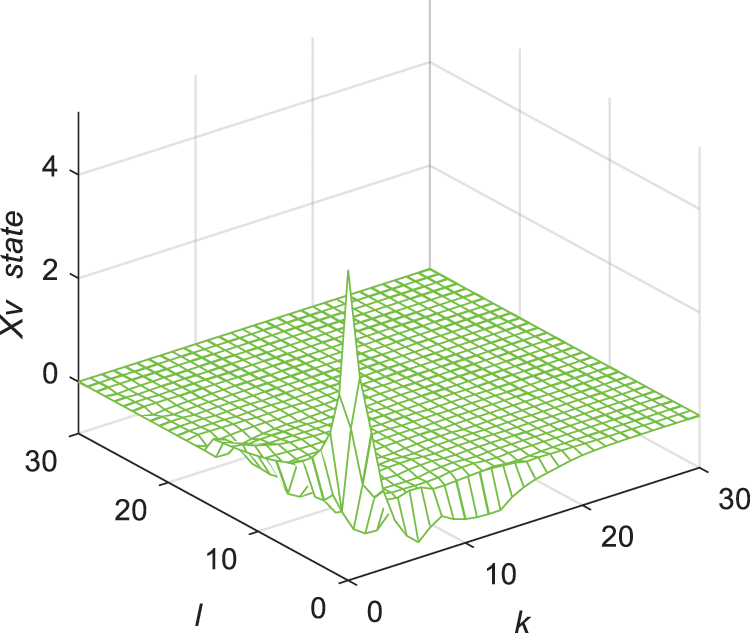
Figure 4: Response of state
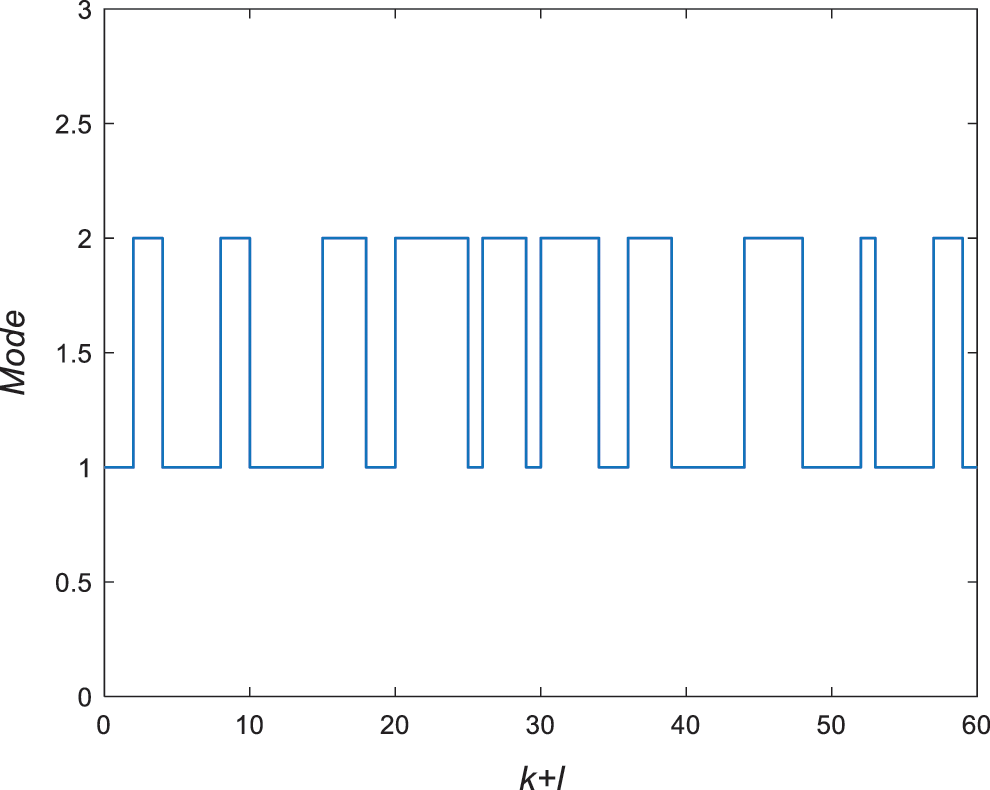
Figure 5: Switching signal
This paper has investigated the problems of stability and weighted robust
Data Availability: The authors declare that they have no conflicts of interest to report regarding the present study.
Funding Statement: Research supported by the Science and Technology Development Program of Jilin Province, the project named: Research on Key Technologies of Intelligent Virtual Interactive 3D Display System (20180201090GX).
Conflicts of Interest: The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
1. I. V. Medvedeva and A. P. Zhzbko, “Synthesis of Razumikhin and Lyapunov-Krasovskii approaches to stability analysis of time-delay systems,” Automatica, vol. 51, no. 1, pp. 372–377, 2015. [Google Scholar]
2. F. Z. Taousser, M. Defoort, M. Djemai and S. Nicaise, “Stability analysis of switched linear systems on non-uniform time domain with unstable subsystems,” IFAC, vol. 50, no. 1, pp. 14873–14878, 2017. [Google Scholar]
3. Q. Zou, L. Wang, J. Liu and Y. Jiang, “A progressive output strategy for real-time feedback control systems,” Intelligent Automation & Soft Computing, vol. 26, no. 3, pp. 631–639, 2020. [Google Scholar]
4. C. Du and L. Xie, “H∞ control and filtering of two-dimensional Systems,” Application in 2-D system and definition of H∞ performance index, 1st ed., vol. 1. Berlin Heidelberg New York: Springer-Verlag, 1–12, 2002. [Google Scholar]
5. B. Lu, F. Liu, X. Ge and Z. Li, “Cryptanalysis and improvement of a chaotic map-control-based and the plain image-related cryptosystem,” Computers, Materials & Continua, vol. 61, no. 2, pp. 687–699, 2019. [Google Scholar]
6. B. Nagaraj, D. Pelusi and J. I. Chen, “Special section on emerging challenges in computational intelligence for signal processing applications,” Intelligent Automation & Soft Computing, vol. 26, no. 4, pp. 737–739, 2020. [Google Scholar]
7. F. Xia and S. Huang, “Application research of color design and collocation in image processing,” Computer Systems Science and Engineering, vol. 35, no. 2, pp. 91–98, 2020. [Google Scholar]
8. R. N. Yang, L. L. Li and X. J. Sun, “Finite-region dissipative dynamic output feedback control for 2-D FM systems with missing measurements,” Information Sciences, vol. 514, no. 9, pp. 1–14, 2020. [Google Scholar]
9. H. Trinh and L. V. Hien, “Prediction-based approach to stabilization of 2-D continuous-time Roesser systems with directional input delays,” Journal of the Franklin Institute, vol. 357, no. 8, pp. 4779–4794, 2020. [Google Scholar]
10. C. Sreekumar and V. Agarwal, “A hybrid control algorithm for voltage regulation in DC-DC boost converter,” IEEE Transactions on Industrial Electronics, vol. 55, no. 6, pp. 2530–2538, 2008. [Google Scholar]
11. L. V. Hien and H. Trinh, “Switching design for suboptimal guaranteed cost control of 2-D nonlinear switched systems in the Roesser model,” Nonlinear Analysis: Hybrid Systems, vol. 24, no. 1, pp. 45–57, 2017. [Google Scholar]
12. L. Li, X. Li and S. Ye, “Dynamic output feedback H∞ control for 2D fuzzy systems,” ISA Transactions, vol. 95, no. 2, pp. 1–10, 2019. [Google Scholar]
13. J. Wang, J. Liang and A. M. Dobaie, “Stability analysis and synthesis for switched Takagi-Sugeno fuzzy positive systems described by the Roesser model,” Fuzzy Sets and Systems, vol. 371, no. 1, pp. 25–39, 2019. [Google Scholar]
14. G. Ravikanth, V. K. and B. E. Reddy, “Location related signals with satellite image fusion method using visual image integration method,” Computer Systems Science and Engineering, vol. 35, no. 5, pp. 385–393, 2020. [Google Scholar]
15. S. Li and H. Lin, “On l1 stability of switched positive singular systems with time-varying delay,” International Journal of Robust and Nonlinear Control, vol. 27, no. 16, pp. 2798–2812, 2017. [Google Scholar]
16. X. Zhao, L. Zhang and P. Shi, “Stability of a class of switched positive linear time-delay systems,” International Journal of Robust and Nonlinear Control, vol. 23, no. 5, pp. 578–589, 2013. [Google Scholar]
17. R. Yang and W. Zheng, “H∞ filtering for discrete-time 2-D switched systems: An extended average dwell time approach,” Automatica, vol. 98, no. 7, pp. 302–313, 2018. [Google Scholar]
18. M. Rehan, M. Tufail and M. T. Akhtar, “On elimination of overflow oscillations in linear time-varying 2-D digital filters represented by a Roesser model,” Signal Processing, vol. 127, no. 11, pp. 247–252, 2016. [Google Scholar]
19. D. Ding, H. Wang and X. Li, “H-/H∞ fault detection observer design for two-dimensional Roesser systems,” Systems & Control Letters, vol. 82, no. 1, pp. 115–120, 2015. [Google Scholar]
20. X. Li and H. Gao, “Robust finite frequency H∞ filtering for uncertain 2-D Roesser systems,” Automatica, vol. 48, no. 6, pp. 1163–1170, 2012. [Google Scholar]
21. L. Zhang and P. Shi, “Stability, l2-gain and asynchronous H∞ control of discrete-time switched systems with average dwell time,” IEEE Transactions on Automatic Control, vol. 54, no. 9, pp. 2192–2199, 2009. [Google Scholar]
22. J. Tao, Z. Wu and Y. Wu, “Filtering of two-dimensional periodic Roesser Systems Subject to dissipativity,” Information Sciences, vol. 461, no. 12, pp. 364–373, 2018. [Google Scholar]
23. J. Lu, Z. She, S. S. Ge and X. Jiang, “Stability analysis of discrete-time switched systems via Multi-step multiple Lyapunov-like functions,” Nonlinear Analysis: Hybrid Systems, vol. 27, no. 4, pp. 44–61, 2018. [Google Scholar]
24. A. Benzaouia, A. Hmamed, F. Tadeo and A. E. Hajjaji, “Stabilization of discrete 2D time switching systems by state feedback control,” International Journal of Systems Science, vol. 42, no. 3, pp. 479–487, 2011. [Google Scholar]
25. Z. Xiang and S. Huang, “Stability analysis and stabilization of discrete-time 2D switched systems,” Circuits, Systems, and Signal Processing, vol. 32, no. 1, pp. 401–414, 2013. [Google Scholar]
26. G. Zhai, B. Hu, K. Yasuda and A. N. Michel, “Disturbance attenuation properties of time-controlled switched systems,” Journal of the Franklin Institute, vol. 338, no. 7, pp. 765–779, 2001. [Google Scholar]
27. J. P. Hespanha and A. S. Morse, “Stability of switched systems with average dwell-time,” in Proc. of the 38th IEEE Conf. on Decision and Control, Phoenix, Arizona USA, pp. 2655–2660, 1999. [Google Scholar]
28. S. P. Boyd, L. E. Ghaoui, E. Feron and V. Balakrishana, “Linear matrix inequalities in system and control theory,” Philadelphia, PA: SIAM, vol. 86, no. 12, pp. 2473–2474, 1994. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |