
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW
Artificial Intelligence Revolutionising the Automotive Sector: A Comprehensive Review of Current Insights, Challenges, and Future Scope
1 Faculty of Mechanical and Automotive Engineering Technology, Universiti Malaysia Pahang Al-Sultan Abdullah, Pekan, 26600, Malaysia
2 Institute for Intelligent Systems Research and Innovation (ISSRI), Deakin University, Warun Ponds, VIC, 3216, Australia
3 Automotive Engineering Centre, Universiti Malaysia Pahang Al-Sultan Abdullah, Pekan, 26600, Malaysia
* Corresponding Author: Md Mustafizur Rahman. Email:
(This article belongs to the Special Issue: Artificial Intelligence Current Perspectives and Alternative Paths: From eXplainable AI to Generative AI and Data Visualization Technologies)
Computers, Materials & Continua 2025, 82(3), 3643-3692. https://doi.org/10.32604/cmc.2025.061749
Received 02 December 2024; Accepted 06 February 2025; Issue published 06 March 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The automotive sector is crucial in modern society, facilitating essential transportation needs across personal, commercial, and logistical domains while significantly contributing to national economic development and employment generation. The transformative impact of Artificial Intelligence (AI) has revolutionised multiple facets of the automotive industry, encompassing intelligent manufacturing processes, diagnostic systems, control mechanisms, supply chain operations, customer service platforms, and traffic management solutions. While extensive research exists on the above aspects of AI applications in automotive contexts, there is a compelling need to synthesise this knowledge comprehensively to guide and inspire future research. This review introduces a novel taxonomic framework that provides a holistic perspective on AI integration into the automotive sector, focusing on next-generation AI methods and their critical implementation aspects. Additionally, the proposed conceptual framework for real-time condition monitoring of electric vehicle subsystems delivers actionable maintenance recommendations to stakeholders, addressing a critical gap in the field. The review highlights that AI has significantly expedited the development of autonomous vehicles regarding navigation, decision-making, and safety features through the use of advanced algorithms and deep learning structures. Furthermore, it identifies advanced driver assistance systems, vehicle health monitoring, and predictive maintenance as the most impactful AI applications, transforming operational safety and maintenance efficiency in modern automotive technologies. The work is beneficial to understanding the various use cases of AI in the different automotive domains, where AI maintains a state-of-the-art for sector-specific applications, providing a strong foundation for meeting Industry 4.0 needs and encouraging AI use among more nascent industry segments. The current work is intended to consolidate previous works while shedding some light on future research directions in promoting further growth of AI-based innovations in the scope of automotive applications.Keywords
In the fourth industrial revolution era, artificial intelligence (AI) significantly impacts the world in resolving hitherto intractable issues from different sectors. AI mimics human behaviour like planning, reasoning, learning, problem-solving, thinking, perception, and decision-making in machines. This cognitive capability is achieved through human intelligence simulation utilising data with feasible algorithms [1,2]. As a result, AI can simplify complex tasks to minimise errors more efficiently, whereas humans are more prone to errors and require more time to complete the same tasks. Therefore, AI adoption in different sectors is increasing dramatically [3], i.e., the automotive sector [4], healthcare sector [5], power sector [6], real estate sector [7], entertainment and gaming sector [8], fast-moving consumer goods sector [9], education sector [10], e-commerce and retail shop sector [11], agriculture sector [12], cybersecurity [13], finance and banking sector [14], and so forth. Since the number of AI-adopted sectors is rising with time, its market is also expanding. VTT Technical Research Centre discusses these matters in their technical paper. They found that the AI market price in 2019 was $39.9 billion, and market analysts predict that this will increase to $733.7 billion in 2027 [15].
Moreover, based on this evidence, it is clear that AI’s significance in different sectors is rising due to its massive beneficial prospects and the outstanding growth of related research activities. Similarly, its importance is also visible in the automotive industry in minimising issues that arise and maximising outcomes intelligently. For example, intelligent fault diagnosis systems [16], intelligent manufacturing processes [17], intelligent control systems [18], intelligent supply chains, sales and service systems [19], intelligent traffic management systems [20], etc. Adopting AI for the abovementioned purposes makes the automotive sector more intelligent and sophisticated. Curiosity about AI is expanding in the automotive domain because it holds the key to the new future. It can extract essential information without the direct intervention of humans and utilise these to run any operation/activity smoothly to gain desired outcomes efficiently besides minimum losses in the automotive sector. As a result, the AI deployment rate in this sector for various purposes is also praiseworthy [21]. According to the report of Precedence Research, the worldwide automotive AI market generated revenue of $3.22 billion in 2023 and is expected to grow from $3.87 billion in 2024 to $35.71 billion by 2033. This remarkable expansion represents a compound annual growth rate of 28% over the nine-year forecast period [22]. Enhancing it in this sector will accelerate economic growth worldwide and improve desired functionalities. However, nuTonomy, AutoX, Optimus Ride, Drive.ai, Waymo, Zoox, CarVi, Nauto, Rethink Robotics, DataRPM, and many other organisations have been using AI technology in the last few years to shape the business context of the automotive sector and move it ahead [3].
Furthermore, the AI technology in this sector acts as a machine-enabled intelligent system that can perceive, learn, analyse, and comprehend the outcomes by following human cognition activity. To ensure the facility of this technology, it usually comprises algorithms with an arrangement of instructions loaded in a machine-like computer, which transforms input data into meaningful output [23]. In this instance, traditionally, it is not confined to machine learning (ML) algorithms used in the automotive sector as AI to expedite the desired work without complexity [24]. Artificial neural networks (ANN), deep learning (DL), reinforcement learning (RL), fuzzy logic, and so on are also currently used to mimic human cognition for better results with utmost efficiency [23]. In previous times, due to AI implementation for different purposes in this sector, various challenging issues arose during the operational period, hindering continuity and reducing overall efficiency. In this case, data quantity context (big data), large-scale implementation, real-time results, processing speed, systems downtimes, costing, and many other issues usually appear challenging. However, the respected researchers continue their exceptional work to mitigate these challenges by perfectly performing the AI system [23,24].
The recent progress of AI adoption and its potential prospects for the future in the automotive sector motivated us to gather valuable information to assist future research work and step ahead of this sector with more sophisticated AI technology. Numerous types of exceptional research have already been carried out independently by focusing on particular issues. For example, Fedullo et al. [25] reviewed the application of AI techniques in the automotive sector, with a focus on innovative measurement systems, advanced driver assistance systems (ADAS), Internet of Things (IoT), and intelligent industrial systems to improve road safety, predictive maintenance (PdM), and build the intelligent automotive factory of the future. Subsequently, to enhance traffic control and vehicle communication in connected vehicle frameworks, Rana et al. [26] summarised a review showing a broad range of AI applications in the automotive industry beyond just ADAS, including car emissions, PdM, and security. However, the researchers suggested future studies on network architecture, connectivity, and performance metrics related to automotive AI and ML applications. Additionally, Ammal and coworkers [27] provided an overview of AI and sensor technology to develop innovative products and applications in the automotive industry, reducing human errors such as aggressive driving, accidents, and traffic collisions. Moreover, a literature study by Vermesan and colleagues [28] summarised that AI technologies enable intelligent functions and optimisation for electric-connected autonomous and shared vehicles to support sustainable green mobility. Nevertheless, decision-making mechanisms in autonomous vehicles need to be developed using AI, machine learning, deep learning, and other advanced techniques to make the processes more reliable and resilient. Despite recent review works offering valuable insights into the use of AI methods in specific aspects of the automotive sector, such as control systems, vehicle diagnostics, traffic management, autonomous driving, and accident prevention, these studies often approach applications in isolation. This fragmented analysis fails to provide a comprehensive understanding of how AI techniques interact, complement, or conflict with one another when integrated into a cohesive automotive ecosystem. Additionally, cross-functional challenges such as interoperability issues, data sharing, and real-time decision-making within interconnected automotive domains remain underexplored, limiting the potential for a unified and optimised implementation of AI in the industry. To address this research gap, it is essential to develop a holistic perspective that integrates various AI techniques, such as machine learning, deep learning, computer vision, and natural language processing, across all application areas within the automotive sector. This integrated approach would enable a comprehensive understanding of the combined potential of these technologies, uncover synergistic opportunities, and provide clarity on overarching challenges. By fostering such a consolidated framework, the automotive industry can move toward building truly intelligent, resilient, and optimised systems. Therefore, this review aims to bridge this gap by holistically examining the state-of-the-art AI techniques, assessing their collective impact, and outlining a roadmap for future research to address these integrative challenges in the automotive industry. In particular, this article infers:
i. Fundamental details about AI technology for the automotive sector;
ii. As pictorial maps, a proposed taxonomy of AI in the automotive field;
iii. Dig out the inclusive information of different AI approaches and their applications in the automotive sector;
iv. Profound analysis of benefits, associated challenges, and future application scope of AI in this sector.
Ultimately, we anticipate that this article’s outcome will represent the credible capture of AI technology’s diversified utilisation and advancement in the automotive sector. Additionally, it will assist as a robust foundation for fulfilling the demand of Industry 4.0 requirements and intensifying the adoption of AI technology in the underprivileged branches of this sector.
The remaining portions of this paper are presented in the following order. Firstly, Section 2 presents a history of AI adoption in the automotive field and utilises this information to portray the taxonomy in Section 3, besides the extensive discussion. Then, Section 4 describes the automotive-based AI conceptual framework, and Section 5 outlines the challenges and potential areas for future AI research in the automotive field. Finally, Section 6 ends this review by emphasising significant contributions and observations.
Due to the pressing need for the quick processing of large amounts of data, AI’s importance in daily life is becoming indispensable. However, this stage of AI is not achieved in a day or a year. It evolved over 70 years and started from the 1940s; indeed, 1942 through Runaround was a short story written by Isaac Asimov, the American Science Fiction writer, where he plotted a robot that allowed it to work for human beings based on some fundamental rules. Later, it inspired scientists and was first coined as “Artificial Intelligence” in 1956 by John McCarthy and Marvin Minsky through many transformations and changes [29]. In 1961, General Motors installed an AI-based industrial robot to advance the automotive industry for managing die castings smoothly. Later, they inspired and enhanced the Lordstown assembly plant using this technology in 1969. They established an AI-based automated vehicular assembly plant in the mid-1970s with MIT to expedite the vehicle manufacturing process [30]. After the industrial cases, the automotive sector also enhanced drive-in highways using this technology.
In 1979, Tsugawa and his research team [31] proposed driverless vehicles as autonomous vehicles (AVs) by recognising road patterns using TV cameras. Such autonomous vehicles could move within 30 Km/hr without driver assistance in different road environments. Also, in the early 1980s, autonomous land vehicles with AI-contained high-performance computing facilities were introduced by DARPA to run the vehicle over the highway at a maximum 45 mph speed [32]. The AI system was confined to the purposes mentioned above for the automotive sector, and it was extended to diagnosing vehicles like an expert system by 1986 [33]. Recently, this concept has attained great attention and is being applied in various cases to diagnose faults in the automotive sector to minimise downtime and increase operational time, which is discussed later elaborately. However, in the early 1990s, researchers began to realise the significance of intelligent traffic management and the employment of AI technology in this sector, which is eloquently discussed in [34]. Besides these, this technology also showed praiseworthy outcomes for intellectual vehicular performance controlling systems in 1995. Furthermore, this work inspired and upgraded AI technology to achieve supremacy for regulating vehicular performance more sophisticatedly [35].
It is noticeable that from the beginning, AI technology’s footprint significantly appeared in the automotive field for manufacturing, autonomous driving, traffic management, vehicle performance regulating, and fault diagnosing purposes [23,36]. Before 2000, AI’s evolution in this sector was in its initial stages compared to other industries. The giant leap happened in 2009, as over the last decade, Google, Tesla, General Motors, Volvo, Intel Corporation, IBM Corporation, and so forth, renowned organisations have undertaken many projects to employ AI technology with a more sophisticated approach for advancing the automotive sector to a great extent [37–39]. However, the adoption of AI is increasing outstandingly, and it is necessary to portray the taxonomy as a map of detailed implementation in the automotive field, described extensively in the upcoming section.
3 Taxonomy of AI in the Automotive Sector
AI applications in the automotive industry have made our lives easier and more dynamic. Therefore, it is unavoidable that all the related aspects of AI in the automotive sector be depicted in an integrative format. For this reason, a taxonomy has been developed (Fig. 1) to give a clear view of AI’s employment in the automotive sector.

Figure 1: Proposed taxonomy of AI in the automotive sector
3.1 Classification of AI Systems
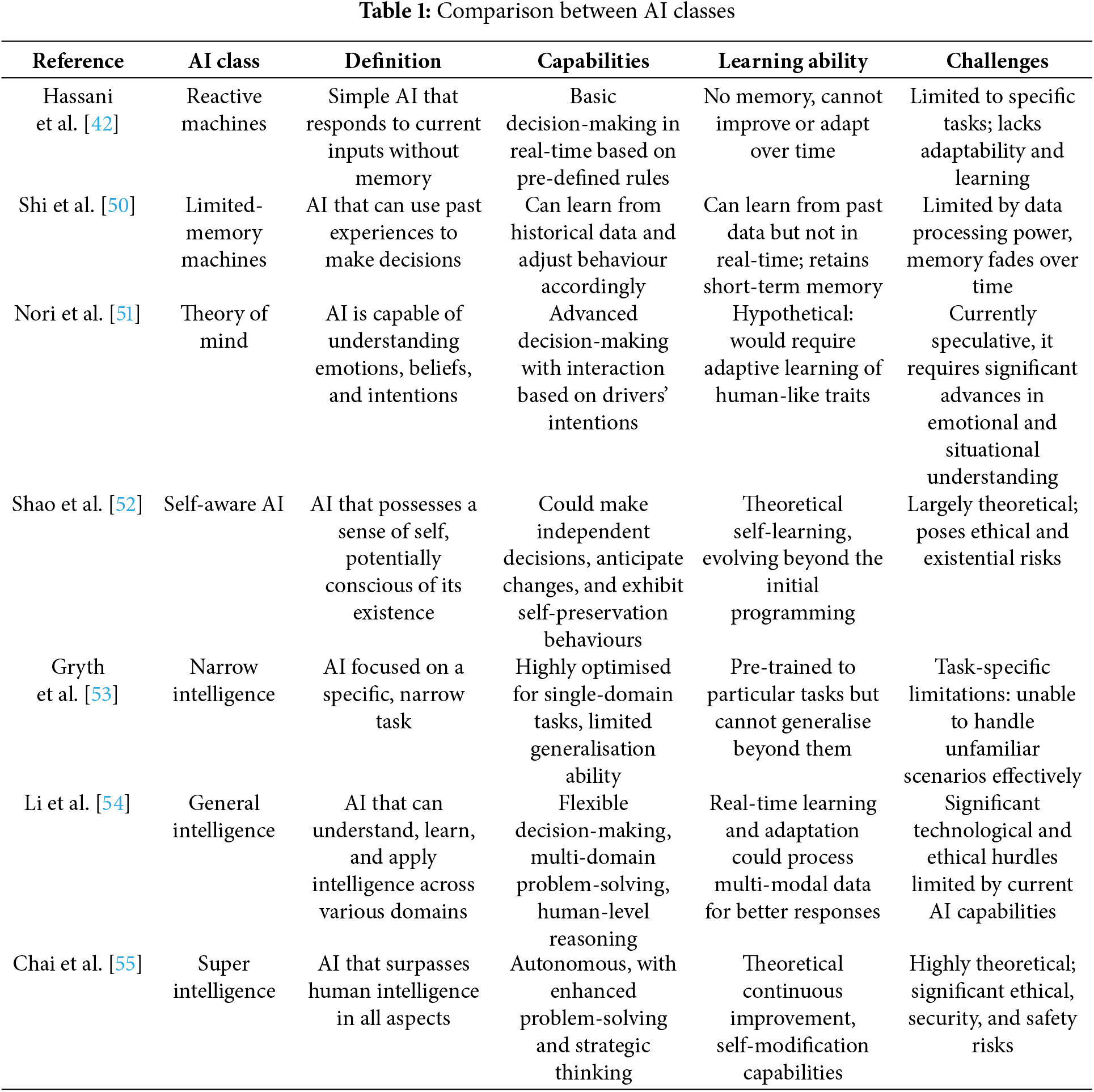
Through human-inspired, analytical, and humanised, depending on the intelligence exhibition (emotional, cognitive, and social) and the evolutionary stage of AI in the automotive sector, it is divided into two distinct groups: Type I and Type II [29,40].
Under this category, the employed AI technology in the automotive sector could behave like a human mind exhibiting the ability to think and feel based on the functionality of the AI system. Moreover, it is classified into four subcategories [41] and described as follows:
The AI system does not depend on memory or utilise previous experiences and decides only based on the current situation or existing scenario [42]. As a result, all control and decisions in the system might be conducted by light processing using current data. So, in this case, low-priced and limited resources are required to get better output, but in some cases may be trapped in complex environments [43]. For example, Mr Roberts and his research team proposed [44] an autonomous underground mining vehicle to ensure operator safety, reducing operational complexity using reactive machines AI. The robust reactive wall-following behaviour was the control architecture for 30 tons Load-Haul-Dump trucks.
The AI system can acquire knowledge and learn from historical data as past experiences, stored data, actions, and learnings to make subsequent decisions. That means this combination of observational data and preprogrammed knowledge is used to make the necessary decision. In this case, the past data is not stored for an extended period [40–42]. AVs are a real-world example of limited-memory machines. It can read their environment to discover patterns and changes in external elements to adapt and learn them, besides observing and understanding how to drive human-operated vehicles efficiently. Also, it can detect other vehicles and pedestrians in their line of sight [45]. Previously, such feats may take up to 100 s, but this time has drastically lowered due to recent technology and software advancements, i.e., deep learning and machine learning [40].
The theory of mind AI is a more advanced stage of AI systems than the previous two systems, which can be described as a human mind. As a result, this system may study human emotional complexities besides behavioural patterns and make predictions about their emotions, intentions, desires, thoughts, and beliefs [41]. In this case, the significant aspect involves grouping entities based on similarity, proximity, symmetry, continuity, common fate, etc. [46]. Thus, drones and AVs might benefit from this AI system because it could avoid physical harm to ordinary people and pedestrians by predicting the movements as humanity’s collective ability [47]. Also, in automotive manufacturing environments, it could help measure employees’ perceptions and behaviour to expedite the manufacturing process [48].
The last step of AI system development is self-aware AI, which currently exhibits hypothetically, and in this case, will attain human-level perception, emotions, desires, and independent decision-making ability based on its own moral compass and philosophical approach. Respected researchers are working on adopting it in the automotive sector, such as AVs, autonomous manufacturing systems, and industrial management; it has a broad scope to continue safe and effective operations in all cases [49].
In this context, AI technology classified based on capabilities and technology in the automotive sector could be organised into three subcategories [49], which are discussed as follows:
Narrow intelligence can be defined as not exhibiting intelligent functionality beyond the particular application domain precisely on what they have been programmed to do [41]. Widely, it performs efficiently on specific tasks based on the given initial training, but generalisation ability is missing except for these particular tasks [48]. Such limited focus capabilities represent AI’s narrowness, also termed “weak AI” [41]. However, the examples of narrow intelligence are related to afore-discussed reactive machines and limited-memory machines AI. Also, in some cases, the theory of the mind machine’s rudimentary examples is involved [40].
Artificial general intelligence can be defined as a system that not only performs like a weak AI. However, that system also has the capabilities or functionalities to understand, learn, perceive, and make decisions entirely the same as human beings [46]. That means the system in the automotive sector could perform any operation like a human without human fatigue besides error [40]. Because of this, it is also called “strong AI.” Moreover, though it does not exist, the continuous development and advancement of narrow AI in the automotive sector minimised the distance between humans and AI machines’ capabilities. Therefore, hopefully, it will lead to general intelligence very soon [41].
It is still in the conceptual stages where the AI system in the automotive sector could have higher cognitive functional capabilities than the human brain. However, since it exists hypothetically, it is hoped that the system may have the total ability to perform moving and transportation services due to enhanced memory besides significantly faster data processing, handling, and decision-making abilities [23]. Table 1 presents the fundamental differences between the different categories of AI in various aspects.
3.2 AI Techniques Used in the Automotive Sector
Commonly used techniques or advanced methods of AI in the automotive field have been applied to perform human-like or superhuman behaviour to operate or maintain the desired system smoothly. For manufacturing, autonomous driving, traffic management, vehicle performance regulating, and fault-diagnosing purposes, various AI approaches and fundamental techniques are currently used to mimic the human brain’s working principle in the automotive sector, described as follows:
Machine learning is an algorithm that learns from the data without depending on rules-based programming. Currently, the ML technique is one of the most effective AI tools for resolving various issues in the automotive industry. By exploring the algorithm’s construction and learning mechanisms, ML can study data patterns to predict the most probable outcomes with high accuracy [56]. Additionally, it shares many similarities and overlaps with computational statistics. Based on the learning nature of the automotive field, it is classified into four categories [57], as depicted in Fig. 2; these are explained as follows.

Figure 2: Machine learning techniques for automotive applications
The supervised learning approach is an AI algorithm generally trained by the labelled input data to predict or provide a firm decision. This approach is primarily suitable for classification in the automotive field besides solving regression problems, and various algorithms are available to achieve the desired outcomes [57]. In this case, supervised learning includes techniques like support vector machines (SVM), K-nearest neighbour (KNN), decision trees (DT), random forest (RF), logistic regression, linear regression, and others. However, in the last decade, the supervised technique has been utilised in the automotive sector for various purposes, where the system is initially trained by feeding required information and later run using the testing data. For instance, Harold et al. [58] proposed a powertrain control framework for hybrid electric vehicles (EV) that uses the supervised learning technique to improve fuel economy, and they achieved a satisfactory outcome over dynamic environments. Furthermore, due to better performance in decision-making and classification, this technique is also implemented in the automotive industry to control manufactured vehicle quality by scrutinising the vehicular body’s panel surfaces [59]. Similarly, last few years, the demand for supervised learning techniques in the automotive sector has risen significantly for various purposes, i.e., estimation of moving vehicle’s road friction [60], improving quality of service for intelligent transport systems [61], performing roundabout manoeuvres for AVs [62], fault detection of unmanned aerial vehicle (UAV) [63], predictive maintenance and risk management [64,65], supply chain management [66], and so forth. However, supervised learning is highly dependent on large, high-quality labelled datasets, which are costly and time-consuming to obtain, particularly for the extensive edge cases seen in real-world driving environments. This reliance on labelled data creates a contradiction: while supervised learning delivers accurate results within a controlled scope, it lacks flexibility, and its performance in dynamic, real-time situations (e.g., autonomous driving) often necessitates additional support from semi-supervised or unsupervised learning for comprehensive adaptability.
In machine learning, the unsupervised learning approaches can be defined as the AI algorithm models or systems that are not supervised based on the labelled training dataset to draw affirmative inferences. This method is crucial in the automotive industry to uncover hidden data for specific purposes, and it currently makes use of a variety of well-liked algorithms, including hierarchical clustering, K-means, self-organising maps, and many others [67,68]. Moreover, this technique significantly improves in some cases compared to supervised learning techniques. For example, an unsupervised learning approach in the automobile manufacturing industry provided praiseworthy performances for detecting the fault and failure prediction of power transmission systems, pneumatic actuators, and valves [69]. Similarly, the K-means clustering algorithm was used by Shaeiri and coworkers [70] as an unsupervised learning approach for vehicular self-maintenance purposes and profiling driver behaviours. They found that the proposed system successfully assists the user. Besides these purposes, day by day, the implementation of this technique in the automotive field is increasing considerably, i.e., real-time automobile insurance fraud detection [70], CAN-based modern vehicle transmission systems [71], enhanced driver assistance systems [72], and so forth. However, unsupervised learning presents notable disadvantages, particularly the difficulty of validating results and the risk of identifying irrelevant patterns, as there is no labelled data for model guidance. This lack of interpretability can hinder safety-critical applications, where understanding the model’s rationale is essential. Contradictions arise in scenarios like autonomous driving, where accuracy and safety are paramount. However, unsupervised learning provides flexibility and speed; it often requires subsequent validation with supervised methods, raising concerns about reliability and the need for hybrid approaches to balance accuracy with adaptability.
It can be defined as the ML approach, where the system is trained by feeding a small amount of labelled data with a large quantity of unlabelled data as a mixture of data. In general, it helps to overcome some difficulties in supervised and unsupervised learning cases where managing a substantial amount of training data is difficult [73]. Semi-supervised learning outperformed supervised models in vehicle trajectory prediction by leveraging large amounts of unlabelled data, thus scaling up the training process and improving accuracy [74]. Additionally, these methods have shown high effectiveness in detecting various network attacks in automotive Ethernet, achieving impressive detection rates [75]. For example, Hoang and the research team [76] employed semi-supervised learning to detect various in-vehicle intrusion attacks, including known attacks like denial of service, fuzzy, and spoofing, as well as unknown attacks. Nevertheless, one major drawback is the difficulty in handling datasets with few labelled samples, as traditional broad learning systems struggle to effectively utilise the information between labelled and unlabelled data [77]. Furthermore, the increased interconnectivity in automotive Ethernet introduces new vulnerabilities. While semi-supervised learning can enhance detection, it is still susceptible to unknown attacks due to the developing nature of this research area [75].
Reinforcement learning is a promising ML technique in which the intelligent agent learns from experiences rather than a training dataset and is concerned with initialising the action in the potentially complex and uncertain environment to maximise reward or outcome by taking a sequence of suitable decisions. Particularly, in the RL paradigm of the automotive field, an autonomous agent interacts with its environment to perceive and learn how to improve its performance at a given activity through a series of trials [78]. In addition, its employment proliferation recently appeared and grew dramatically in this field to mitigate complex issues smartly. Moreover, Navarro et al. [79] found that for developing a simulated environment and control strategies of an AV, this approach is cost-effective and requires the lowest data solution than the traditional algorithm. Again, it has extreme significance for vehicle routing problem solutions, and Nazari’s research team revealed it, proposing an end-to-end framework for self-driven learning [80]. Recently, to get better outcomes in this sector, the RL approach enhanced deep reinforcement learning (DRL) by combining its architecture with ANNs, where software-defined agents enable learning best. As a result, it has performed praiseworthy in autonomous driving [78,81], UAV navigation [82,83], unmanned surface vehicles [84], and many others for environment recognition, decision-making, and controlling system advancement. However, the lack of standard tooling solutions for RL-based function development in the automotive industry remains challenging [85]. Furthermore, while RL can theoretically enhance driving policies, practical implementation requires reliable fallback mechanisms and high-fidelity simulators to ensure safety and effective policy transfer from simulations to real-world applications [86,87].
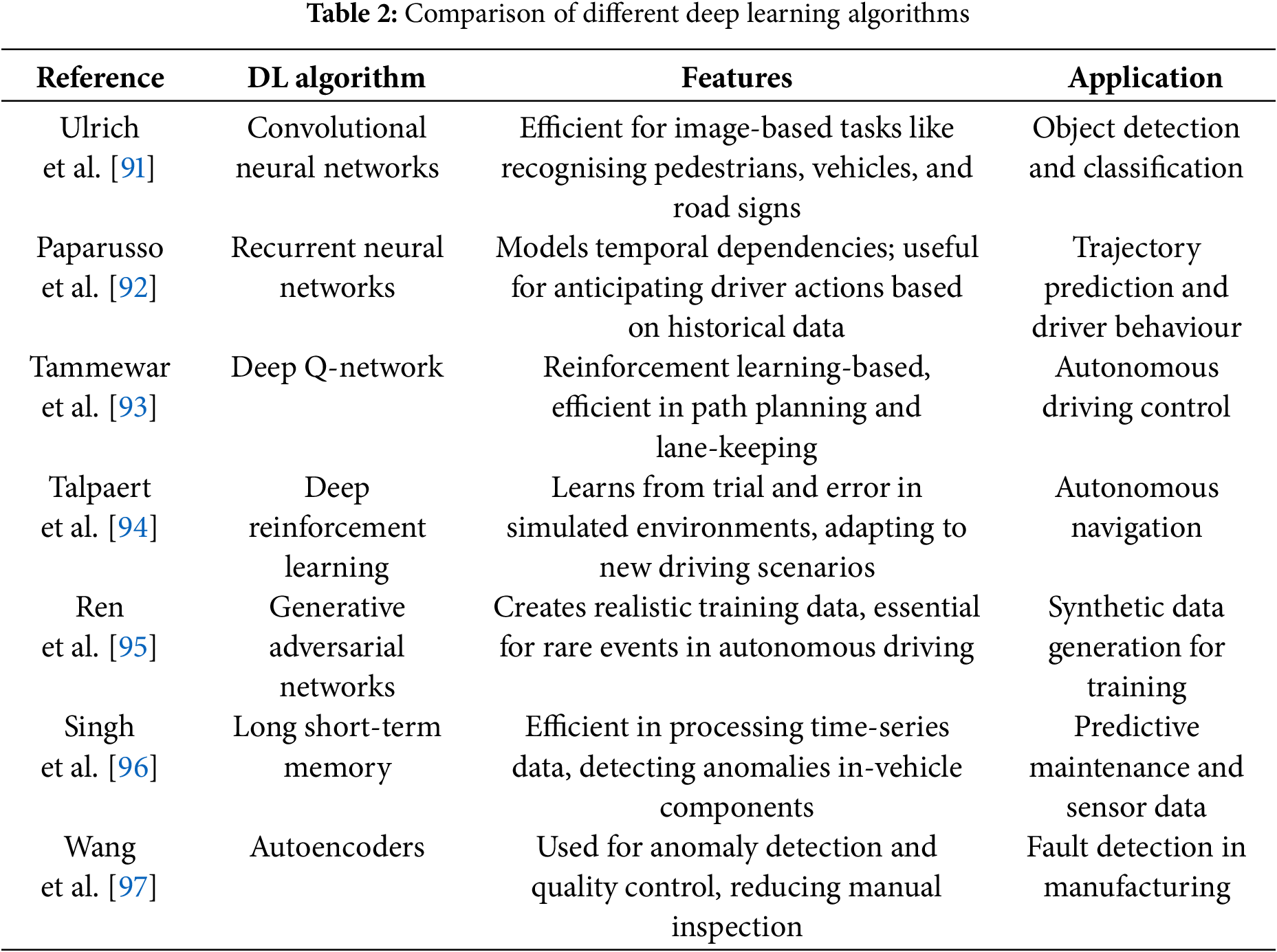
The deep learning technique in AI consists of ML algorithms that use multilayered ANNs to mimic human intelligence by learning and making the best decision, with the most layers acting as the hidden layer. Its effectiveness has been demonstrated outstandingly for any purpose in the automotive branch, and implementation is rising dramatically [88]. The significance of DL was realised by Chen’s research team [89] from Cardiff University, UK, for predictive vehicle maintenance based on maintenance history and geographical information system (GIS) data. It outperformed based on real-world information than other traditional approaches and anticipated that it would reduce the fleet management organisations’ maintenance-related burdens. Similarly, Naqvi et al. [90] achieved greater accuracy in mitigating accidental issues due to inconsistent driver behaviours. The results were much better than those obtained in previous research using a convolutional neural network (CNN) and DL technique with pupil centre corneal reflection-based method.
Again, for demand forecasting and inventory management of automobile spare parts, the DL approach (modified Adam optimiser with recurrent neural network (RNN)/long short-term memory (LSTM)) performed well and provided less error than available other methods [98]. Moreover, its footprints are also extensively sketched in remote sensing of UAVs for various purposes in urban, agricultural, and environmental contexts. Gated recurrent unit (GRU), Bi-GRU, Bi-LSTM, and DL approaches are prominently used for fault diagnosis and identification in this sector [99]. Table 2 presents how various DL algorithms enhance automotive applications like driver assistance systems and traffic management, improving safety and efficiency. However, these techniques demand significant computational resources and extensive training data to ensure reliability and safety in real-world scenarios. Therefore, contradictions arise in balancing the rapid advancements in DL with the automotive industry’s stringent safety and validation requirements, highlighting the need for ongoing research and development to address these challenges.
The heuristic technique is an approach for the specific problem that implements the practical method or numerous shortcut approaches and often gives satisfactory solutions more quickly than other classic methods [100]. In the automotive sector, day by day, its application is increasing satisfactorily due to its quick problem-solving features. For instance, decomposition strategies in vehicle routing heuristics can significantly enhance performance by breaking down significant problems into manageable subproblems, as demonstrated by the superior performance of route-based decomposition methods over path-based methods [101]. In addition, the heuristic method with improved multi-choice goal programming is used in the vehicle-related logistics system to design a green supply chain management system by adopting carbon regulation as greener practices [102]. Similarly, Pérez’s research team [103] found that the automotive industry could benefit from the logistic system by minimising transportation costs through minimum touring distance, loading-unloading operations, and proper decision-making using the heuristic algorithm. However, the primary disadvantage of heuristic methods is that they often rely on rule-of-thumb approaches that may not guarantee optimal solutions and can lack robustness across varying conditions, potentially leading to inconsistent performance. Furthermore, though they provide practical solutions for quick decision-making, their reliance on approximations and empirical rules may fall short in applications requiring high precision and predictability.
3.2.4 Metaheuristic Techniques
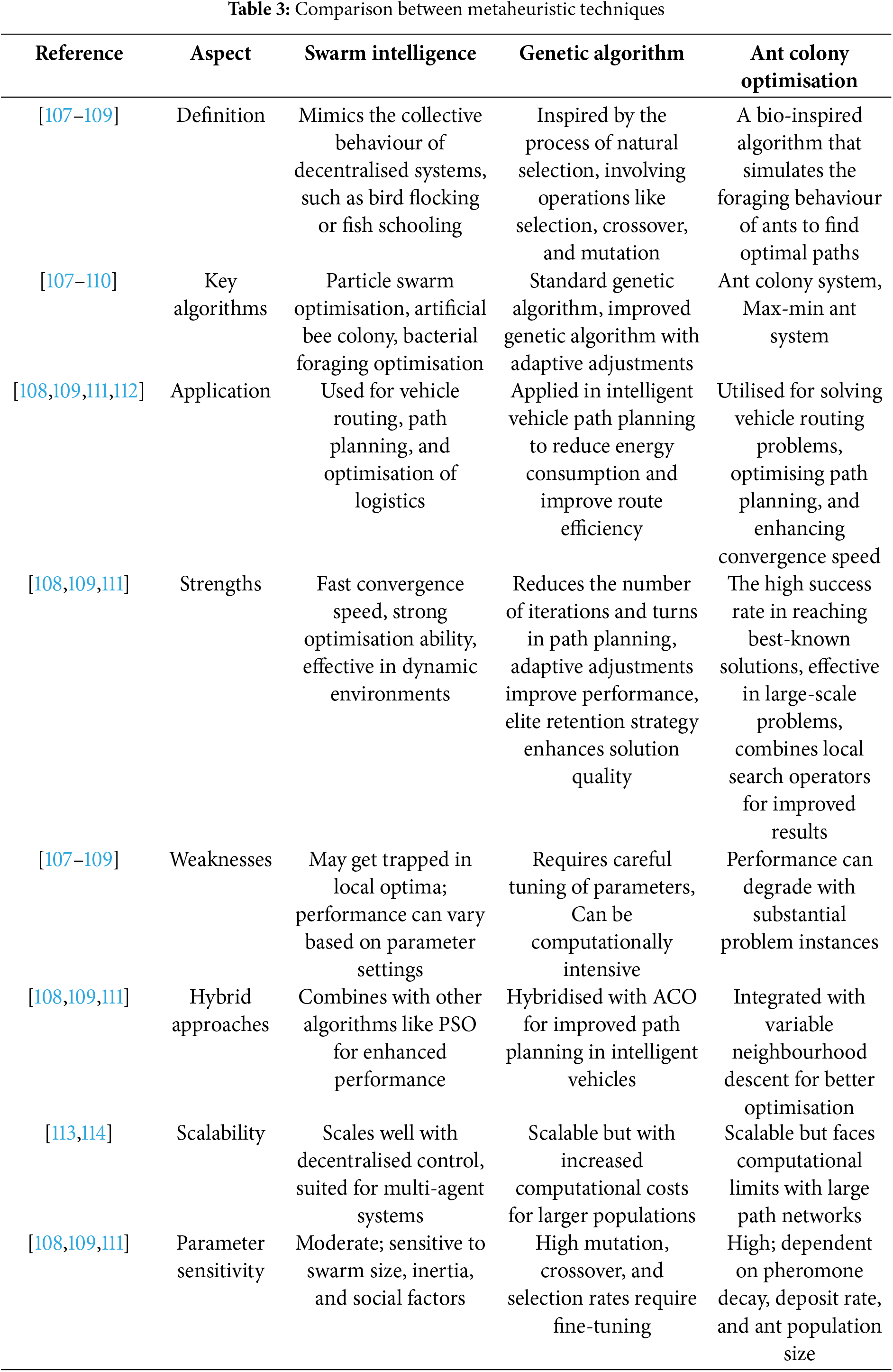
Metaheuristic approaches emerged as versatile problem-solving tools that operate independently of specific problems, employing innovative strategies based on heuristic principles to resolve various challenges. Here, the prefix meta indicates the high-level methodological nature [104]. These techniques, such as those developed for vehicle routing problems, provide robust solutions to complex combinatorial optimisation issues by iteratively exploring and exploiting the search space, often outperforming traditional performance and conceptual originality [105]. Nature-inspired meta-heuristics, in particular, have been successfully applied across various domains, including automotive logistics, due to their flexibility and ability to handle diverse problem sets [106]. Table 3 summarises some innovative approaches to these techniques used in the automotive sector to optimise a broad range of complex issues perfectly.
Apart from machine learning, statistical learning can be defined as mathematics intensive, which means formalised relationships among the variables in a mathematical equation. Also, it forms a hypothesis before building the model; besides, it depends on the smaller dataset with some attributes and operates under assumptions compared to ML (because ML requires a massive data set to learn algorithms and is not assumptions dependent) [39]. However, it could be categorised into three categories: natural language processing, gesture recognition, and speech recognition (Fig. 3). Firstly, NLP is the AI approach that may help the system or machine recognise, manipulate, and interpret human language efficiently. Its significance in the automotive field is massive in utilising structured and unstructured data for various cases, such as driving improvement, customer service enhancement, and resource management improvement [115]. Also, this technique could assist the driver at the time of the journey if the driver asks for any assistance regarding the vehicle owner’s manual, where it can convert the information of the manual into text [116]. Secondly, gesture recognition is the approach to establishing human-machine interaction using only body actions instead of voice. In the automotive field, gesture recognition is usually conducted through three stages, i.e., detection, tracking, and recognition. Tateno et al. [117] developed a gesture-based control system using an infrared sensor array installed in vehicles. The system recognises seven distinct hand movements to control the vehicle’s directional movement through a CNN-powered data processing mechanism. Finally, speech recognition involves understanding a person’s words through a computer and translating them into a machine-readable format. This AI feature facilitates driving vehicles without distraction to ensure a safe and comfortable journey in the vehicle. Its application for different purposes in automotive is also notable, and employment of this technique is escalating with changing times. For example, a DL-based speech recognition system was developed for Arabic drivers to reduce distraction and improve human-vehicle interaction [118]. The study achieved high speech recognition accuracy of over 94% for noise-free audio and over 91% for noisy audio using various acoustic models. However, implementing the above approaches in the automotive sector presents numerous challenges. NLP systems must handle context understanding, multilingual support, and integration with other systems. On the contrary, gesture recognition faces accuracy, real-time processing, and user variability issues. Furthermore, speech recognition systems must overcome noise interference and low signal-to-noise ratio conditions, with advanced speech enhancement techniques offering potential solutions.

Figure 3: Automotive applications of statistical learning approaches
Game-theoretic learning is an approach in the AI field where a player among a set of players as the individual agent can make the optimal decision (prediction) of each other sequentially for upcoming actions, and the outcome comes from these decisions [119]. So, it explains how the agents strategically might learn from the consequences of social interaction in the long run and adopt the behaviour. It has shown significant promise for self-driving vehicles in enhancing decision-making processes and improving safety and efficiency in complex traffic environments. Various studies have integrated game theory with deep reinforcement learning to model interactions between multiple vehicles, including human-driven ones, in diverse scenarios. For instance, one approach combines DRL with game-theoretic decision-making to enable AVs to navigate unsignalized intersections by modelling different driving behaviours and anticipating the reactions of other vehicles without explicit communication [120]. Another study formulates lane-changing decisions as games between pairs of vehicles, using neural learning to adjust payoff matrices and optimise behaviour [121]. Additionally, game-theoretic planners have been developed for competitive scenarios, such as autonomous racing, where vehicles employ strategies like blocking and overtaking to outperform others. These planners often outperform traditional model-predictive control methods by considering vehicle interactions [122]. Furthermore, multi-agent planning algorithms have been proposed to handle interactions with human drivers at intersections and roundabouts, assigning priorities based on observed driving styles to prevent collisions and deadlocks [123]. However, multi-agent interaction involves predicting and responding to the behaviours of numerous traffic participants, including other AVs, human-driven cars, and pedestrians. This complexity is compounded by the need for real-time decision-making, which requires efficient computational algorithms to ensure safety and optimal performance. The integration of game theory with DL and memory neural networks has also been explored to predict opponent behaviours and enhance path planning in dynamic environments [124]. However, robustness against unpredictable behaviours of human drivers and the dynamic nature of traffic environments also poses a significant hurdle, necessitating advanced models that can adapt to varying conditions and uncertainties.
Fuzzy logic is a reasoning method in AI that imitates human reasoning for decision-making by manipulating or representing uncertain information based on the degree of truth or a partial truth that could be all intermediate possibilities for any actual number between o to 1 [125]. Vehicle designers have leveraged fuzzy techniques in the automotive sector to enhance dynamic control analysis, providing a cost-effective solution for examining vehicle performance during driving modelling. One commonality of this method for application in different automotive aspects is its ability to handle uncertainty and subjectivity, which is crucial in applications ranging from failure mode and effects analysis (FMEA) to demand forecasting and energy efficiency evaluation [126,127]. For instance, fuzzy logic enhances traditional FMEA by incorporating expert knowledge to more effectively analyse subjective failures [128], and it is also used to predict vehicle ranges in EVs by considering dynamic parameters [129]. Moreover, its applications extend to Industry 4.0 readiness assessments, demonstrating versatility across different analytical domains [130]. These applications highlight the flexibility of fuzzy logic but also underscore the differences in its implementation based on the problem being addressed. Contradictions arise in the perceived efficiency and accuracy of fuzzy logic models. For instance, while the Mamdani-type fuzzy logic model is praised for its high accuracy in evaluating vehicle energy efficiency [131], other studies suggest that integrating fuzzy logic with different techniques, such as neural networks or big data analytics, can yield more robust and reliable results [126,132]. This denial suggests that fuzzy logic is a powerful tool. Still, its effectiveness can be context-dependent, and combining it with other methodologies may enhance its utility in the automotive sector.
3.2.8 Hybrid Intelligent Systems
In the automotive sector, hybridisation systems combine multiple AI methodologies, such as machine learning, rule-based systems, and optimisation algorithms, to enhance decision-making and control systems, particularly in autonomous driving, predictive maintenance, and driver assistance systems. These approaches share an analogy in their objective to improve accuracy, adaptability, and robustness by compensating for individual limitations of each AI technique, such as integrating rule-based systems for interpretability with ML for adaptability. For instance, the use of hybrid human-AI in semi-autonomous driving systems aims to leverage human judgment alongside AI capabilities to improve system reliability and performance [133]. Similarly, the ML-multi-agent system framework combines ML models with rule-based agents from symbolic AI to address the limitations of ML-only approaches, thereby enhancing the driving score in fully autonomous vehicles [134]. Recently, Rahim et al. [135] developed a CNN-BiGRU-based hybrid decision model for vehicular engine health monitoring that combines CNN for feature extraction and BiGRU for handling sequential dependencies in time-series engine data. They achieved high decision accuracy (0.8897) with low decision loss, surpassing conventional models by integrating sensor data with structural and vulnerability assessment information for improved PdM. Furthermore, hybrid systems offer a promising approach to overcoming some of the current limitations faced by fully autonomous vehicles. By integrating hybrid electric vehicle technology with autonomous driving systems, several practical benefits can be realised.
Energy Efficiency and Management
Hybrid systems can significantly enhance the energy efficiency of AVs. For instance, the integration of intelligent driver assistance systems, such as adaptive cruise control (ACC) and energy management systems, can optimise energy consumption. These systems use advanced control strategies like model predictive control and neuro-fuzzy systems to maintain safe distances and manage acceleration, thereby reducing energy waste and improving fuel efficiency by up to 2.6% [136]. Additionally, hybrid powertrains allow AVs to achieve similar energy savings with smaller motors compared to those required by human drivers, thanks to more optimal torque requests and efficient engine operations [137].
Hybrid control models can improve the robustness and adaptability of AVs under various driving conditions. For example, combining model predictive and Stanley-based controllers can enhance vehicle control and path-following capabilities, ensuring better performance in diverse scenarios [138]. Moreover, hybrid ML-based control strategies can optimise driving performance and smoothness, addressing limitations in existing control systems [139].
Hybrid systems in AVs can also contribute to reducing environmental impact. By employing advanced fuzzy logic control for energy management, hybrid electric AVs can decrease fuel usage and extend battery life, leading to a reduced carbon footprint [140]. This aligns with the automotive industry’s goals of sustainability and reduced emissions.
Integration with Urban Traffic Systems
In urban environments, hybrid systems can facilitate the coexistence of autonomous and non-autonomous vehicles. For instance, creating exclusive lanes for AVs and allowing them to travel in platoons can reduce travel times and improve traffic flow, as demonstrated in simulations using real-world data [141]. This hybrid approach can ease the transition to fully autonomous urban mobility.
By enhancing energy efficiency, control, safety, and environmental sustainability, and by facilitating integration with existing traffic systems, hybrid systems can address many of the current limitations of AVs. However, the development and deployment of these hybrid systems face complexities related to algorithm portability and the standardisation of software development processes, which are crucial for mass production and industrial applications [142]. Subsequently, integrating AI into existing vehicle systems requires significant modifications and validation to ensure safety and compliance with regulatory standards, which can be resource-intensive and time-consuming [143].
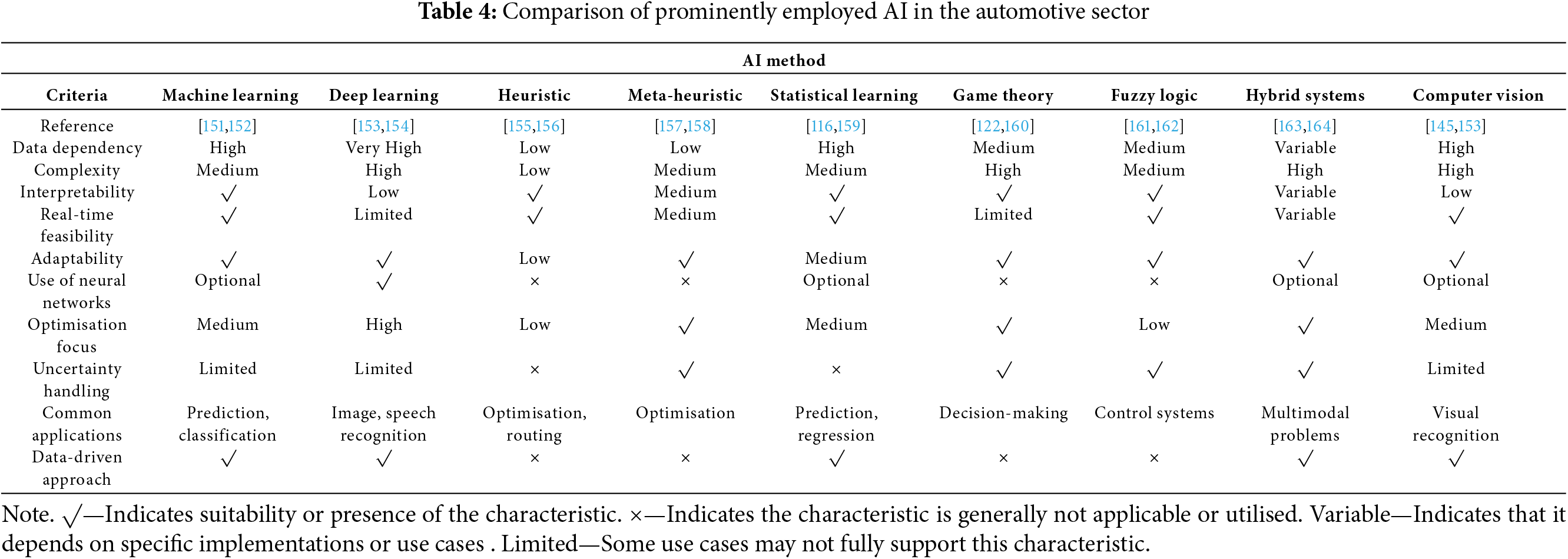
In AI, computer vision for vehicles empowers them to perceive everything in their surroundings or natural environment without human assistance. The application of computer vision techniques in the automotive sector has been explored extensively, revealing converging and diverging viewpoints among researchers. Several studies highlight the potential of computer vision for enhancing safety and efficiency in automotive applications. For instance, edge and ellipse detection, camera calibration, 3-D reconstruction, and stereo vision have been successfully applied to detect rims, estimate calibration angles, and reconstruct vehicle trajectories, demonstrating the versatility of these methods in solving complex vehicle problems [144]. Similarly, integrating this method with Industry 4.0 technologies, such as remote sensing data fusion and mapping tools, has improved collision avoidance and environment mapping [145]. However, there are notable differences in focus. At the same time, some researchers emphasise the role of computer vision in ADAS for safety purposes, highlighting the superiority of DL techniques over traditional methods [146]. Others concentrate on its application in manufacturing for quality control and defect detection [147,148]. While some studies advocate for the immediate integration of self-adjusting computer vision systems to achieve zero-defect manufacturing [147], others point out the slow-growing R&D infrastructure in certain regions, which could hinder such advancements [145]. Additionally, the use of computer vision for non-contact weigh-in-motion systems [149] and error detection in vehicle parts [150] further illustrates the diverse applications and ongoing research gaps in this field. However, Table 4 compares various criteria of the AI methods mentioned above.
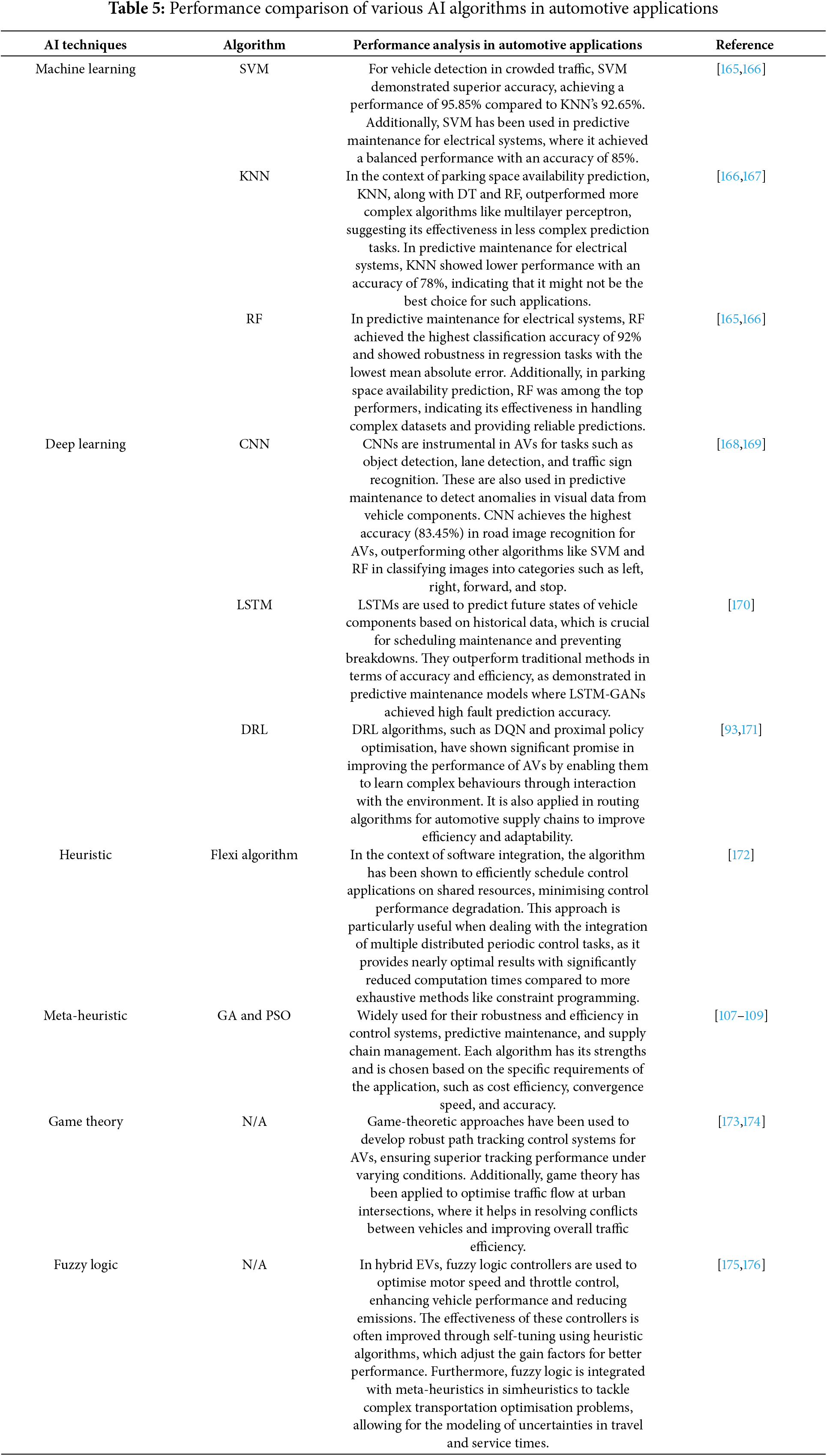
Various AI algorithms in the automotive sector have been critically evaluated and compared based on key performance metrics, as shown in Table 5.
3.3 Overview of AI’s Applications and Opportunities
Recently, AI’s application in the automotive sector has been increasing outstandingly to ensure intelligent services, computing, networking, and security purposes, exploiting the most efficient techniques. The prominent purposes of AI in this sector are described as follows.
3.3.1 Advanced Driver Assistance Systems
Advanced driver assistance systems are a recent automotive innovation that enhances safety and comfort by automatically detecting and responding to potential road hazards through environmental sensing and interpretation [177]. ADAS provides automobiles with a mix of sensor technologies and AI processing algorithms that perceive the environment surrounding the vehicle, process it, and then either present information to the driver or take action [178]. The state-of-the-art sensors used in this system for various functions are RADAR (radio detection and ranging) (long range, short or medium range), LiDAR (light detection and ranging), camera (monocular, stereo, and infrared), and ultrasonic sensors [179]. The integration of AI in ADAS has led to the development of sophisticated algorithms, which enable the system to adapt to different driving environments and user preferences [180,181]. To assure the highest degree of safety, reinforcement learning algorithms have recently been applied for many levels of task repetition. For example, Gonjalo et al. [182] created a prototype variable message sign reading system with the help of ML techniques to improve road safety, in which images were preprocessed and delivered to an optical character recognition model, and subsequently converted to announcements using IBM Watson Text to Speech. Moreover, Salve et al. [183] proposed a CNN model with two output layers that can provide an alert through an alarm when the driver is continuously predicted to be exhausted. The applications of ADAS consist of adaptive cruise control (ACC), collision avoidance (CA), and automatic parking, among many others [184], which are discussed as follows.
This critical ADAS component integrates onboard sensor data to maintain safe following distances and prevent forward collisions with preceding vehicles [185]. RADAR technology emits microwave sequences to estimate object distance and speed, while LiDAR provides high-resolution object detection by projecting beams and calculating distances in ACC-equipped vehicles [186]. AI techniques, particularly DL neural networks, have been employed to improve the predictive control of ACC systems. For instance, neural network predictive control has been utilised to mimic vehicle dynamics and optimise control actions, demonstrating improved performance in maintaining safe distances and adapting to dynamic driving conditions [187,188]. Moreover, personalised ACC systems, which adapt to individual driving styles using AI, have also been developed to enhance user comfort and safety by learning and adjusting to real-time driver feedback [189]. Furthermore, innovative methods for scene recognition and target tracking in complex traffic environments have been proposed, leveraging multi-sensor fusion and advanced filtering techniques to improve the robustness and accuracy of ACC systems [190]. According to an analysis, traffic congestion could be efficiently eliminated when 25% of highway vehicles are equipped with ACC [191].
Collision avoidance, a sophisticated ADAS component in autonomous vehicles, prevents potential collisions by alerting drivers to environmental hazards [192]. It usually follows two strategies for risk assessment, i.e., path planning and path tracking strategies [191], and the process is briefly presented in Fig. 4. The path planning component designs a collision-free route by analysing current road conditions. In contrast, path tracking ensures the vehicle adheres to this route using feedback adjustments. The risk assessment is used to quantitatively analyse the objects’ risk level from where collisions can be predicted. After a proper risk assessment of imminent collision, the vehicle will replace the current route and follow the replanned route using a path-tracking strategy. It addresses various driving scenarios, such as lane-keeping and lane-changing, by configuring control parameters specific to each scenario. The system relies on vehicle actuators—steering, throttle, and braking—to execute manoeuvres and adapt in real time. Two controllers, longitudinal (for speed control in car-following) and lateral (for lateral movement in lane-changing) work together to maintain safe and stable vehicle behaviour. Yu et al. [193] developed spatial-temporal CA algorithms using ML to enhance collision prediction accuracy and optimise AV decision-making. Additionally, a CA model was proposed by Rill et al. [192] that used optical flow and monocular depth estimation based on DL techniques to estimate the ego vehicle’s speed depending on the lead vehicle’s distance. However, challenges like restricted fields of view and inaccurate range information generated from vision-based methods have been addressed by developing a multi-sensor approach that integrates LiDAR data for precise time-to-collision calculations [194].
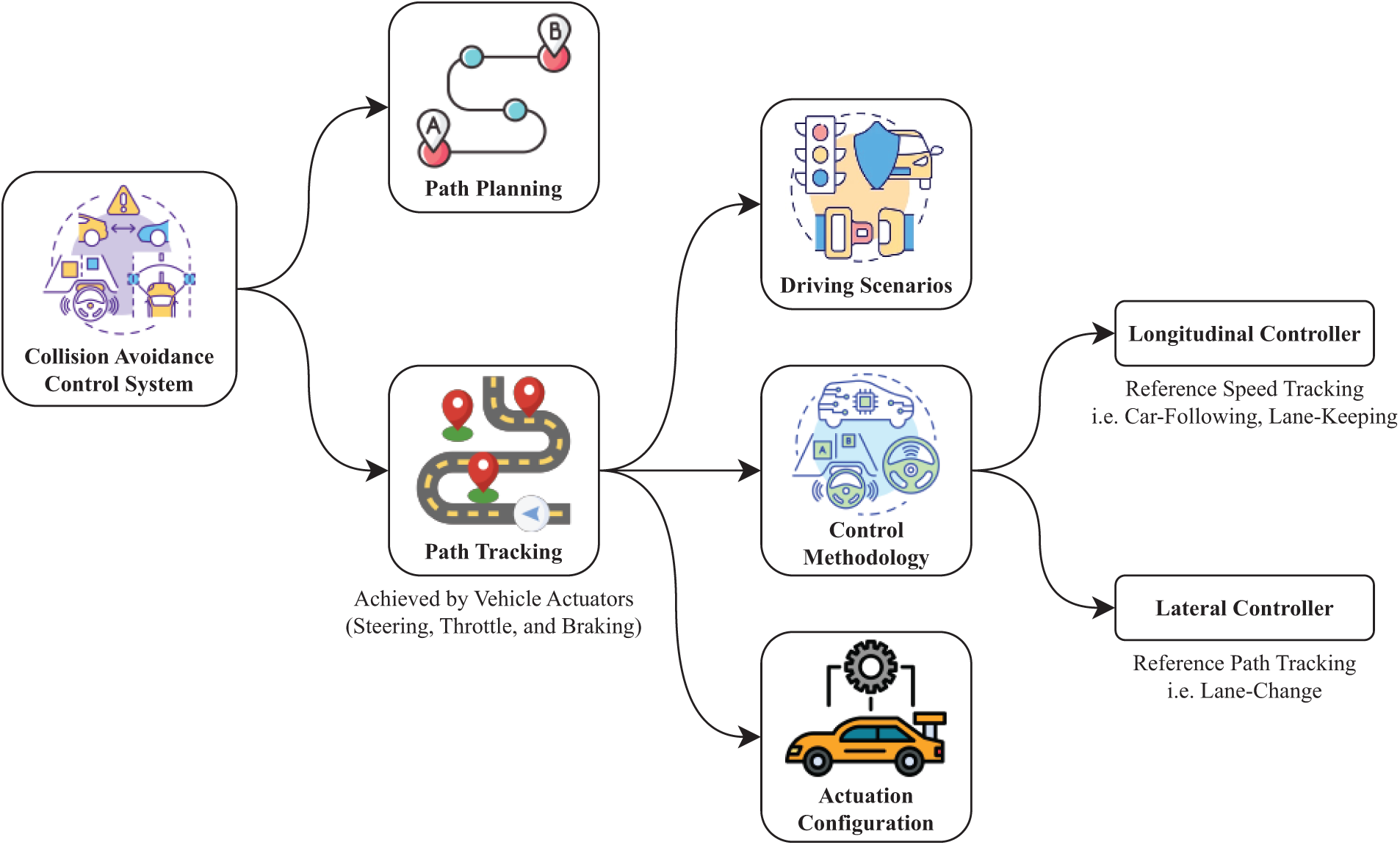
Figure 4: Collision avoidance system using AI
Automatic parking systems represent a pinnacle of vehicle automation, seamlessly integrating real-time sensor data with sophisticated motion planning algorithms. By synthesising environmental inputs from an array of sensors, these systems can execute precise parallel, angled, or perpendicular parking manoeuvres autonomously, effectively removing the complexity and stress traditionally associated with challenging parking scenarios [191]. Ultrasonic sensors are used in these systems to store information about parking spaces when a vehicle exits its parking spot. Afterwards, based on a two-dimensional map, RADARs are employed to locate appropriate parking places [195]. Recently, numerous researchers have applied DRL to develop an automatic parking model to ensure more complex and efficient operations. For example, Zhang and coworkers [196] proposed that reinforcement learning-based end-to-end parking algorithms allow vehicles to learn optimal steering commands through continuous experience, thereby reducing path-tracking errors and improving parking accuracy. Additionally, the fusion of camera sensor data and RADAR enhances these systems’ perception and decision-making capabilities, enabling more reliable multi-target matching and scenario extraction [197]. Furthermore, Guo et al. [198] designed an automatic parking system using an improved DL algorithm, which resulted in 34.83% less time-consuming than manual parking.
3.3.2 Vehicle Health Monitoring Systems
AI-enabled vehicle health monitoring systems (VHMS) use sensor networks and diagnostic algorithms to monitor component conditions and detect abnormalities in modern vehicles. The system collects information from the engine body, fuel flow system, engine speed, etc., using connected sensors, Arduino, and the cloud [199]. Therefore, any abnormal behaviour from single or multiple vehicle components is reported instantly through VHMS so that safety precautions can be taken rapidly to avoid complete vehicle failure. Recent studies have emphasised the integration of AI technologies to enhance vehicle health management capabilities. For instance, Rahman et al. [200] have suggested a conceptual framework for a central VHMS based on multi-layer heterogeneous networks. They advocated an ML approach in this scenario to monitor individual vehicle health concerns, warn drivers, and create data for future necessary measures. Moreover, the use of DL for monitoring engine vulnerable components [201], signal integrity tracking, and fault detection [202] are highlighted as some of the significant advancements. Similarly, the application of AI for real-time diagnosis and prognosis in vehicular systems is underscored, with a focus on the powertrain and drivetrain components. However, there are notable differences in the approaches and technologies employed. Though some researchers advocate using unsupervised DL models to simplify data collection and labelling processes [202], others propose using dynamic Bayesian networks for fault detection and prognosis in AVs [203]. Additionally, using lightweight computational intelligence for IoT health monitoring in off-road vehicles, leveraging economic sensors and edge devices presents a cost-effective alternative to traditional methods [204]. Nevertheless, researchers contrast the dependence on cloud-based vs. edge-based solutions, with some studies emphasising the need for cloud computing to handle big data [202]. In contrast, others highlight the limitations of cloud dependence in rural areas and propose edge-device-enabled solutions [204]. These perspectives underscore the diverse methodologies and technological preferences in AI-based vehicle health monitoring, reflecting both the potential and the challenges of implementing such systems across different vehicle types and operational environments.
3.3.3 AI in Automotive Manufacturing
The integration of AI in automotive manufacturing spans across design and prototyping, manufacturing and assembly, and post-production systems, offering numerous advantages as illustrated in Fig. 5. For example, General Motors in the USA employed AI to create a prototype for one of their vehicles that evolved a new seat belt bracket that was 40% lighter and 20% stronger than its original design [205]. In addition, to improve the flexibility of manufacturing in the automotive metalworking industry, a low-load universal collaborative robot (cobot) system was proposed with innovative security solutions [206]. AI technologies have significantly enhanced design efficiency, reduced costs, and improved manufacturing quality, making the industry more competitive and sustainable [207]. For instance, using federated learning-AI in decision-making and smart contract policies effectively managed costs, energy, and other control functions in the manufacturing process [208]. Moreover, the automotive AI transformation has radically changed organisational infrastructure and management working methods for better performance, efficiency, and competitiveness. At the same time, leadership styles are also evolving in automotive industries, and AI methods are being used to provide more strategic and analytical solutions within the optimum time frame [209]. Workforce adaptation and ethical considerations are significant impediments, as the shift towards AI-driven processes necessitates new skills and raises concerns about job displacement [207]. Moreover, it is driving innovation and reshaping the industry’s future. There are difficulties in establishing AI technologies at the firm level, emphasising the need for organisational readiness and digital skills [210]. Contradictions also arise regarding the scope of AI’s impact. Some researchers focus on the benefits of AI in autonomous vehicle design and production logistics [211]. In contrast, others stress the unresolved issues in production planning and sequence control [212].
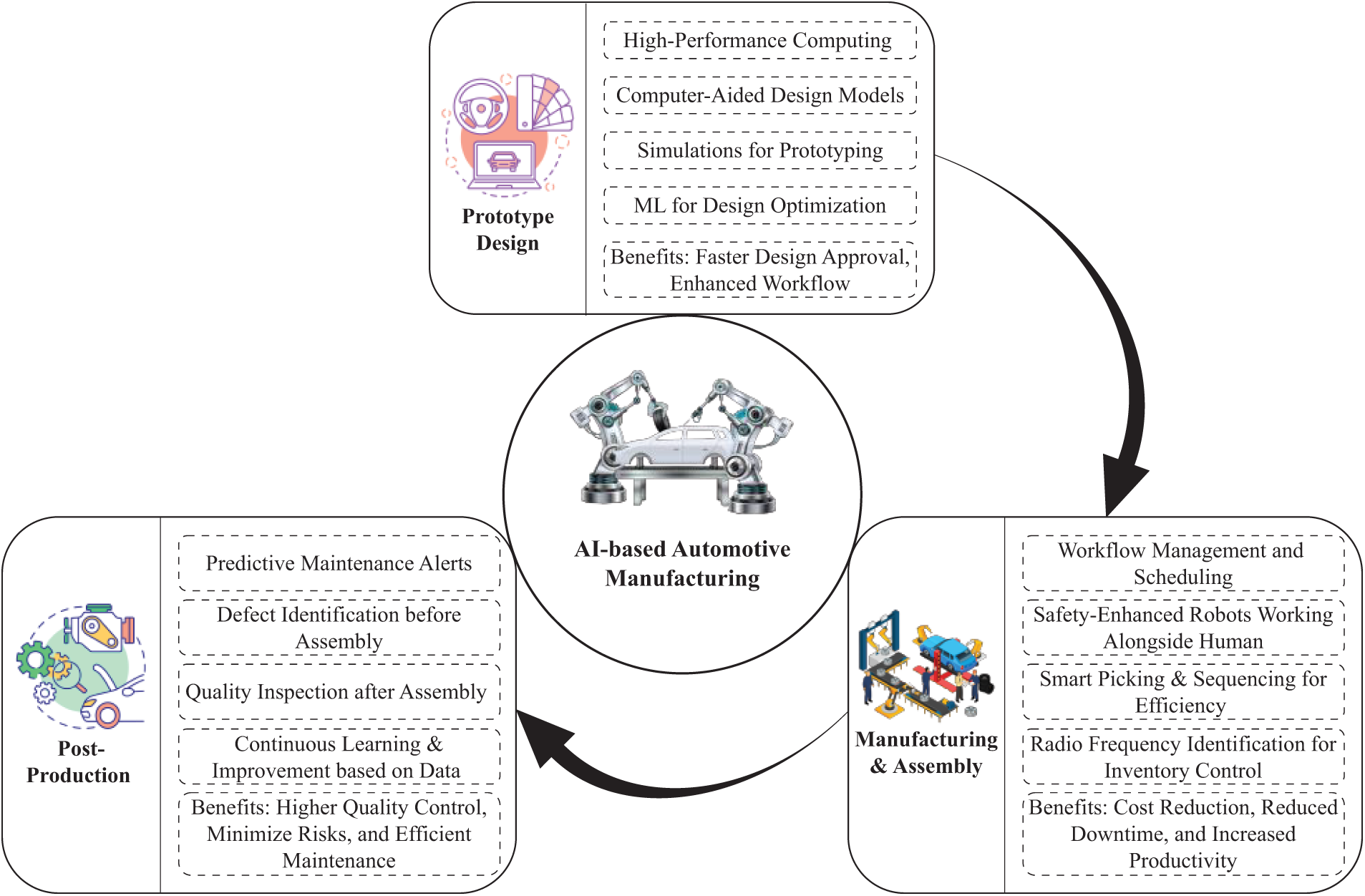
Figure 5: AI deployment in automotive manufacturing
3.3.4 AI in Supply Chain Management
Supply chain management (SCM) is the process of controlling the movements of products and services, which covers all procedures that convert raw materials into finished commodities. Different AI technologies are currently being used in various subfields of automotive SCM for resource utilisation and information sharing among suppliers, manufacturers, and consumers to get the highest efficiency keeping time and money at an optimum level (Fig. 6). As an example, study by Arunmozhi et al. [213] found a 12.48% reduction in energy wastage and an 11.58% reduction in hidden financial transactions in the AV supply chain using the blockchain and AI-based approach. Their framework is expected to improve product traceability, transaction transparency, and sustainable economic growth in AV supply chains. Subsequently, AI-based SCM significantly influences raw material procurement, bridging the gap between raw material suppliers and automobile manufacturers [214]. AI and ML effectively maintain a proper and accurate inventory of automotive parts by analysing large real-time data sets and forecasting supply and demand efficiently to improve product availability and customer satisfaction [215]. AI can optimise inbound logistics in the automotive industry by assessing disruption risks and proposing countermeasures to ensure material availability [216]. AI techniques combined with IoT help track and monitor automotive parts to avoid any unprecedented damage (due to improper handling and by providing insights into materials based on temperature and humidity) and ensure timely arrival at sites [217]. Furthermore, in the production process, AI is able to identify any quality issues of the finished product at an early stage. For instance, Audi implemented a project to improve the testing process in products where ML automatically identified the finest cracks of sheet metal parts within seconds [217]. Meanwhile, Mercedes Benz and Renaults came to realise the benefits of AI in the supply chain as soon as they developed risk mitigation and contingency plans to reduce the probability of production or financial losses where large amounts of data were processed with the help of AI models [205].
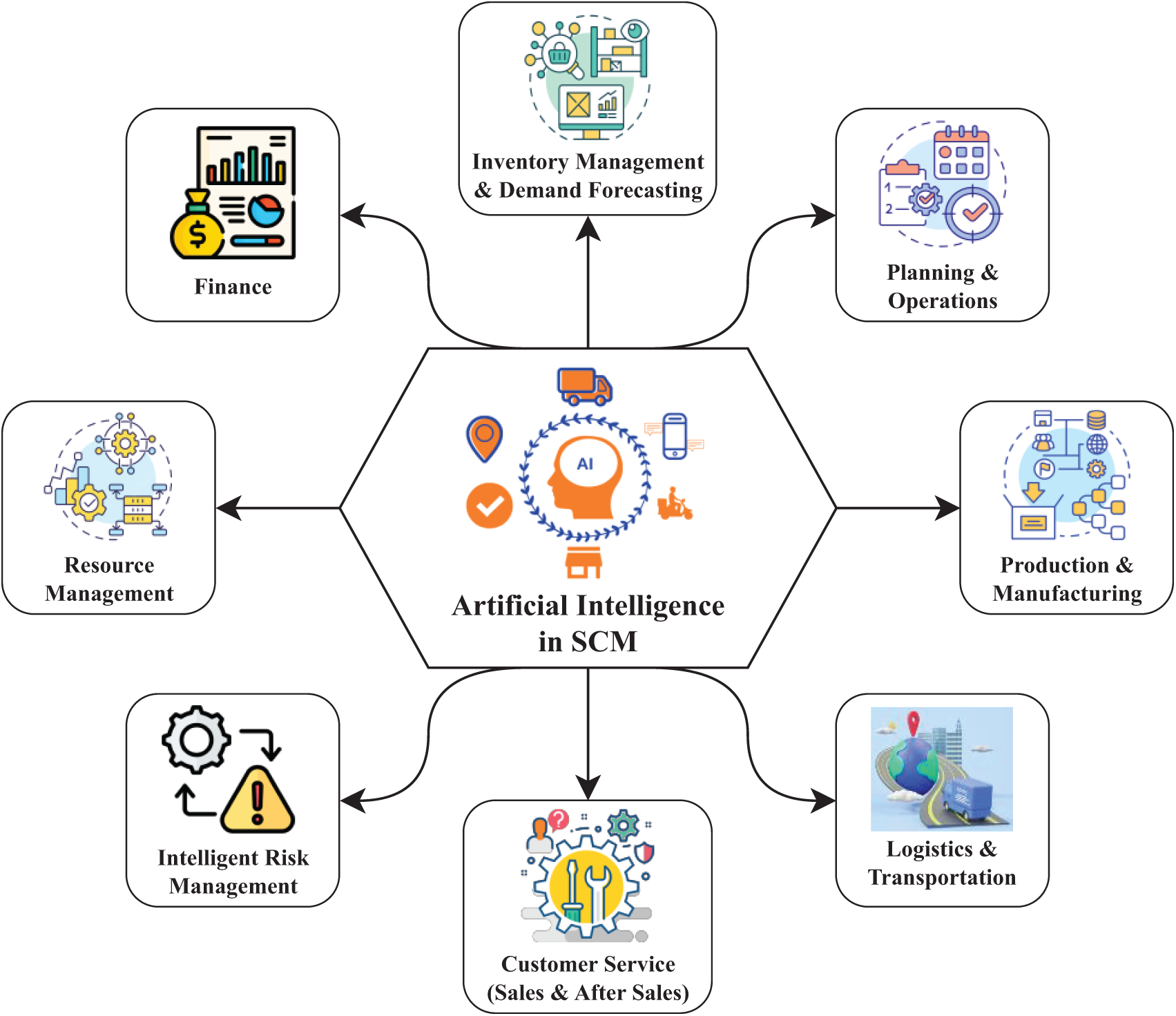
Figure 6: Features of AI-driven automotive SCM
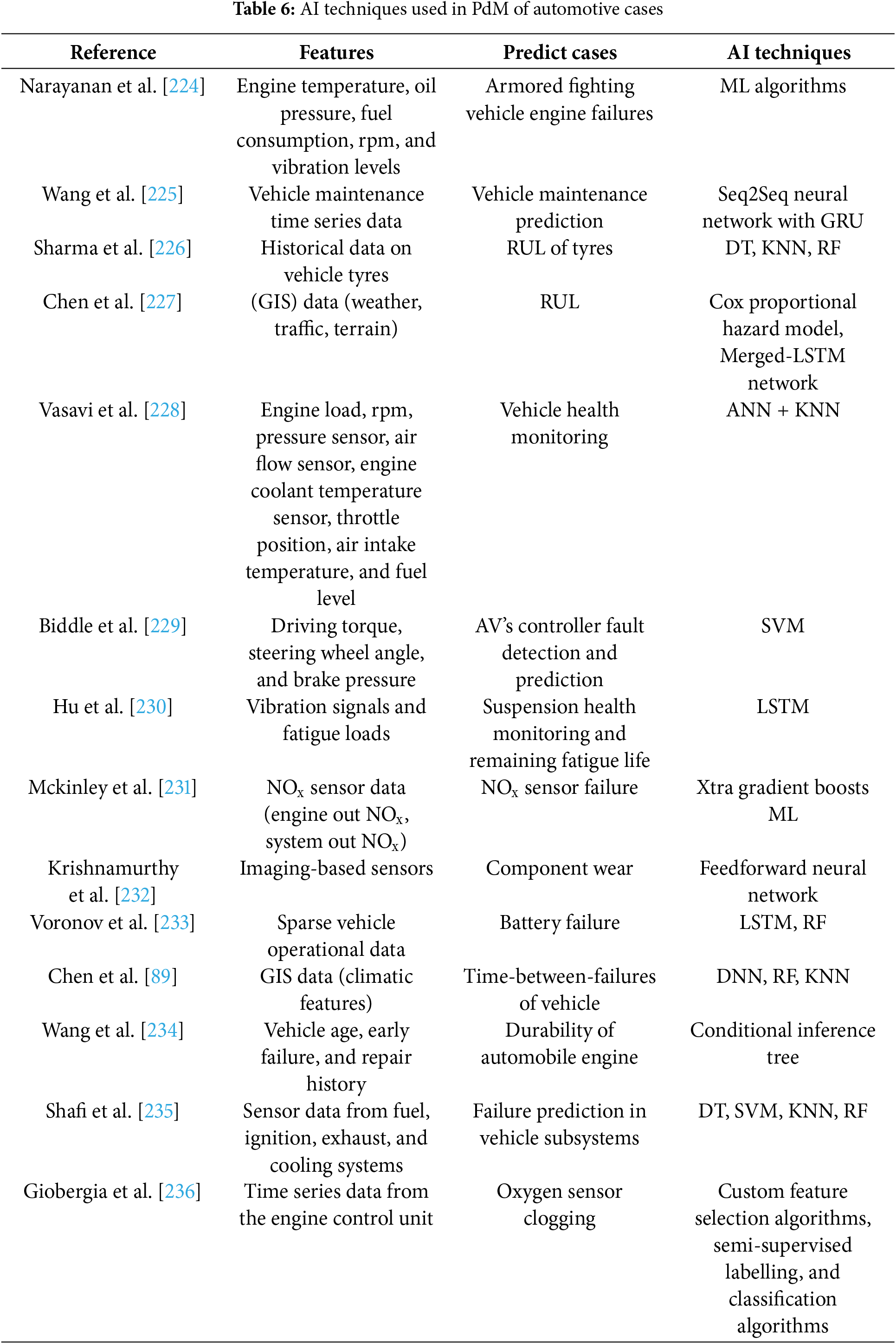
Predictive maintenance intends to predict the time frame of maintenance activities based on the system’s health condition (statistical PdM) and recorded data of the system (condition-based PdM) to avoid costly repair as well as ensure timely repair (before failure). Fault diagnostics and prognosis are important research areas for PdM involving feature extraction, selection, and fault classification. By leveraging advanced sensor technologies and big data analytics, AI techniques can predict potential failures and estimate the remaining useful life (RUL) of automotive components, allowing for timely and precise maintenance actions [218–220]. This proactive approach minimises unexpected breakdowns and extends the lifespan of vehicle parts, contributing to overall operational efficiency [221]. Table 6 shows that most existing research relies on supervised ML methods requiring labelled data. Therefore, combining multiple data sources can improve the accuracy of PdM models [222]. Modern vehicles equipped with sensors provide extensive data about their condition and performance, which can be analysed to avoid vehicle failures by constructing statistical and mathematical models using ML algorithms and executing maintenance activities resulting in models [218]. For instance, Aravind et al. [223] presented a model for AI-based PdM in AVs using physics models, advanced sensors, and reconfigurable devices, aiming to examine electronic components’ deterioration and the relationship between local failures and global system malfunctions. The research presents a proof-of-concept simulation that demonstrates the effectiveness of the proposed physics models, data-driven learning strategies, and virtual prototype-aided dynamics learning control schemes in handling different transmission system dynamics and fault phenomena. However, the non-availability of real automotive datasets, usually considered highly confidential by companies, prevents a qualitative comparison of novel approaches with the state of the art. Furthermore, evaluating the validity of developed methods using real data is difficult, as real data is often unlabelled or only partially labelled, and annotating data is time-consuming and requires expert knowledge [218].
4 Conceptual Framework of AI-Based Electric Vehicle’s Real-Time Health Control Model
The significance of AI in the automotive sector in regulating the degradation of vehicles and their control systems’ valuable parts is growing because of the real-time monitoring of their health and performance. Until today, the available intelligent features in traditional vehicles successfully minimised maintenance expenses, improved durability, reduced unexpected downtime, unexpected accidents, and so forth [237]. However, conventional vehicles are not environmentally friendly due to using fossil fuels to drive them, the emission of excessive greenhouse gasses, and climate deterioration. As a result, the demand for electric vehicles is rising dramatically, and the market analyst predicted that the market will expand to $802.81 billion by 2027 [238]. Again, according to Reuters, vehicle manufacturers commit to ending fossil-fuel vehicles by 2040 with 100% zero-emission vehicles. Based on the discussed matters, it can be inferred that EV demand will explode quickly instead of fossil-fuel-driven vehicles because EV production costs will be cheaper and more flexible than fossil fuel vehicles by 2027, and the fossil fuel vehicles’ overall market could be downed [239,240].
The notable matter is that EVs have many essential components, i.e., complete structure, electric controller, electric motor, tyre, transmission system, and so on, which are greatly responsible for running the vehicle smoothly. Unexpected irregularities of these components may lead to devastating accidents, reduce vehicular longevity, increase operating expenses, waste valuable time, and many other issues may arise [241]. Also, sensible component irregularities may lead to unexpected downtime, irregular spare parts replacement, excessive maintenance expenses, excessive operating expenses, and replacement of expensive spare parts, hindering people’s interest in EVs. Recently, much research has been conducted on EVs as part of their health monitoring system to overcome the abovementioned issues. Still, these researches are confined to specific items of health monitoring systems like tyres [242], batteries, traction motors [243], charging faults [244], predicting the RUL of EVs [245], and so forth. Therefore, in the Industry 4.0 era, the smart and intelligent decision-providing model is a prerequisite to control the degradation of EV’s sensible component by measuring its real-time condition. However, till now, a robust, smart, intelligent, and secure AI-based EV’s real-time health control model system has not been developed using structural data and associated risk factors that could monitor, control, and notify as fast as possible by ensuring reliability and accuracy. Therefore, Fig. 7 presents an AI-based comprehensive model designed to monitor, assess, and manage the health of critical EV components in real time. The process begins with identifying essential components like the battery, motor, and transmission and then assessing their vulnerabilities and associated risk factors. A wireless sensor network is established to continuously gather real-time data from these components, focusing on key indicators like temperature, vibration, and electrical parameters. The collected data undergoes preprocessing and feature engineering to ensure its quality and relevance for predictive analytics. ML and DL algorithms then analyse this data to estimate each component’s RUL and health status, enabling accurate predictions of potential failures. After rigorous model performance evaluations in a controlled test-bed environment, the VHMS framework is implemented in real-world EVs applications, where it continuously monitors component health and provides timely alerts and maintenance recommendations. This smart, intelligent approach minimises unexpected downtime and maintenance costs and supports the Industry 4.0 goal of creating smart, sustainable, and efficient EVs.
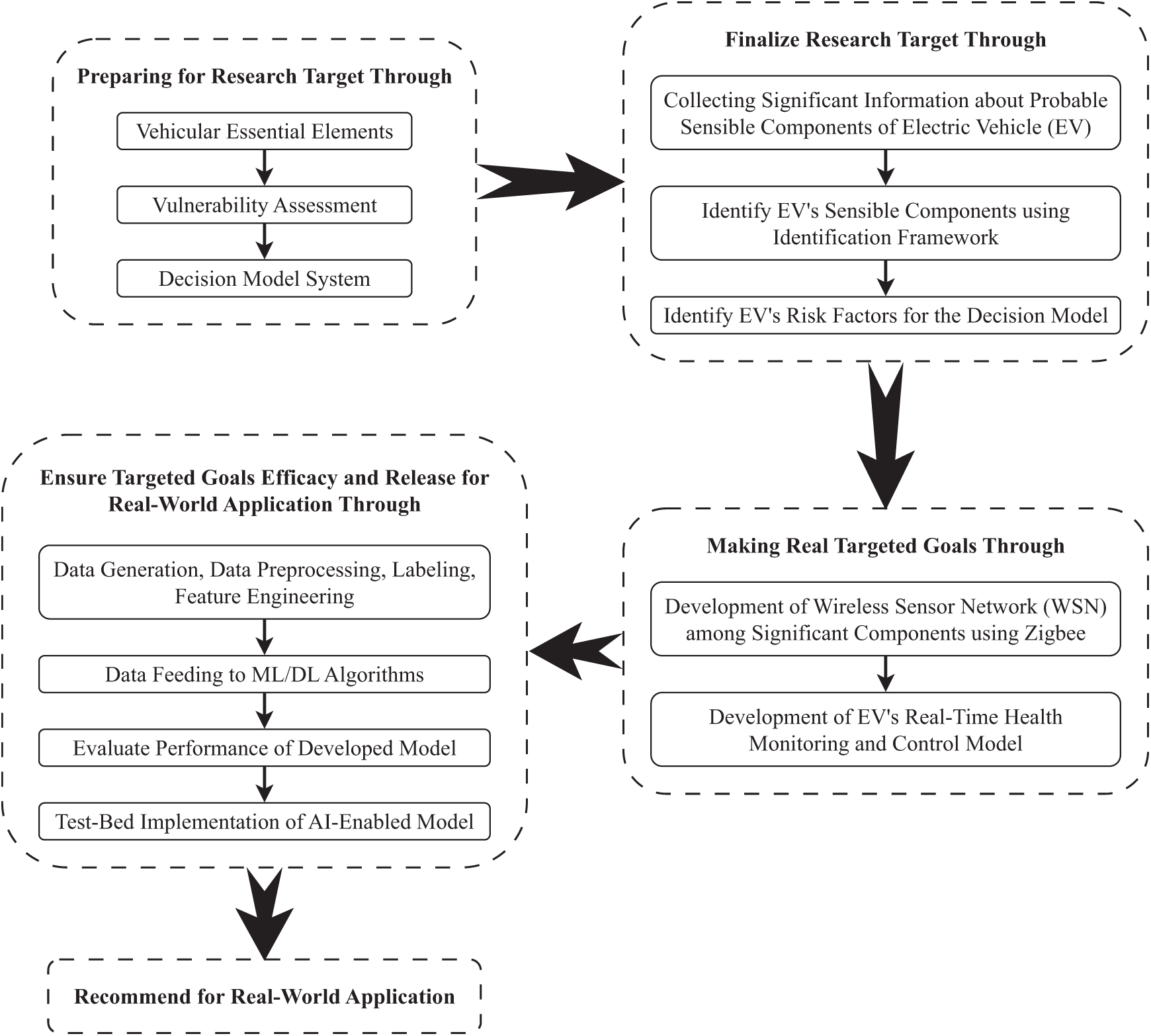
Figure 7: Conceptual framework of AI-based health monitoring system for EVs
5 Challenges and Future Scopes of AI in Automotive Sector
As AI technologies evolve, they promise unprecedented advancements in autonomous driving, predictive maintenance, and intelligent transportation systems while presenting complex technological, ethical, and infrastructure challenges. However, successful integration requires addressing critical issues and overcoming many obstacles, as presented in Fig. 8.
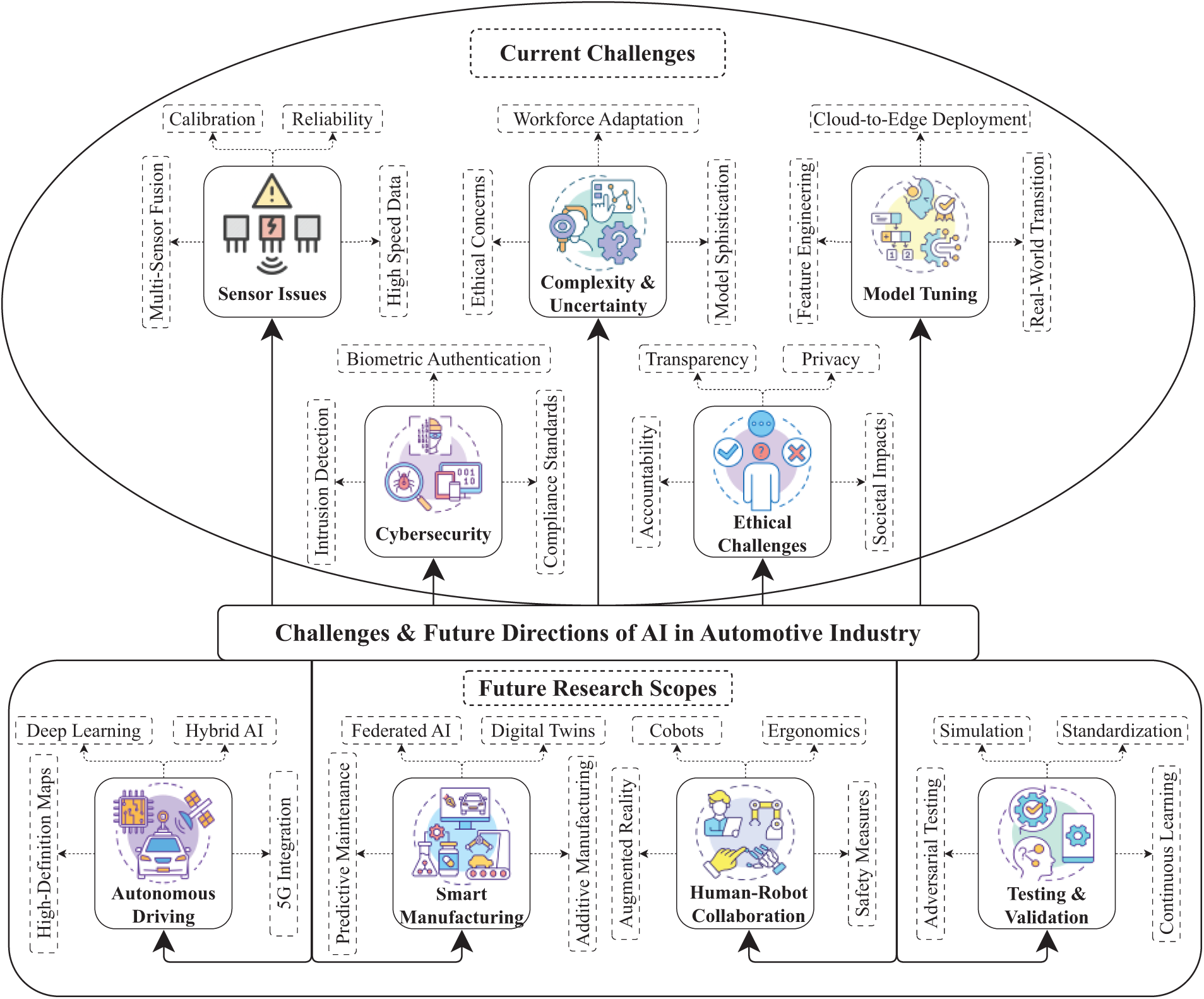
Figure 8: Overview of AI challenges and future opportunities in automotive
Integrating AI into existing automotive systems presents several practical challenges. One of the primary concerns is ensuring the safety and dependability of AI-based systems, especially in mission-critical applications like real-time embedded systems in vehicles [246]. The integration process must address ethical and legal considerations, data privacy, and liability issues, which are crucial for maintaining trust and compliance with regulations [247]. Additionally, the complexity of AI systems requires robust solutions to handle scalability, real-time data processing, and security vulnerabilities, which are essential for enhancing vehicular networks and communication protocols. The automotive industry also faces challenges related to data availability, quality, and system integration, alongside ethical and regulatory conundrums, particularly as vehicles become more autonomous [248]. Furthermore, the integration of AI in automotive design and manufacturing must consider the impact on employment and the need for international standards to ensure secure AI systems in vehicles [247]. However, following are the detailed practical challenges of introducing AI in automotive sector.
AI integration in AVs fundamentally depends on sophisticated sensor technologies, which serve as the critical sensory interface for perception and decision-making processes. The automotive sector faces substantial challenges in ensuring sensor reliability, performance, and effectiveness, directly impacting the safety and functionality of AI-driven automotive systems. Sensor calibration emerges as a crucial factor in autonomous system performance. Complex multi-sensor fusion techniques require precise alignment for accurate object detection and reliable vehicle operation [249]. In addition, sensor reliability represents another pivotal concern, particularly for IoT sensors in cyber-physical systems. Unreliable sensor data can fundamentally undermine AI applications, necessitating robust methodologies to enhance data quality and consistency [248]. Moreover, the intricate sensor infrastructure in modern vehicles demands sophisticated data management and high-speed networking capabilities to process the vast amount of generated data. This complexity introduces significant challenges across hardware and software domains, with additional complications arising from high energy consumption requirements and the need for rapid data processing [250]. After all, innovative AI applications for the automotive sector are often limited by the sensor technology available. The success of an entire AI model is strongly dependent on the quality of input sensor signals [27]. Hence, resolving these challenges is the first step towards the safe and effective deployment of AVs and other AI surfer automotive applications.
5.1.2 Complexity and Uncertainty
The development of AI systems, especially for autonomous and connected vehicles, relies heavily on the labour-intensive contributions of micro-workers who annotate and process vast amounts of data, highlighting a structural dependency on low-paid labour across global supply chains [251]. Additionally, the increasing complexity of vehicle digital architectures necessitates sophisticated AI models for predictive maintenance, which, while promising enhanced efficiency and cost reduction, also reveal emerging and declining research trends that underscore the dynamic and evolving nature of the field [218,221]. Adopting AI in automotive safety and cybersecurity further complicates the landscape. New attack vectors and sophisticated hacking tools pose significant risks, necessitating the development of explicable AI and robust security measures [252]. The automotive industry’s ongoing digital transformation, driven by AI, IoT, and ML integration, has reshaped business processes and relationships, underscoring the sector’s embrace of innovation and technological advancement. However, this digital overhaul also presents ethical considerations and challenges in workforce adaptation [253]. Thus, the complexity and uncertainty of AI in the automotive sector are characterised by a confluence of technological advancements, labour dynamics, cybersecurity threats, and ethical factors, all of which require careful navigation to harness AI’s full potential.
5.1.3 Complex Model Tuning Issues
Training complex AI models in the automotive industry presents many significant challenges of fine-tuning. The complex and time-variant nature of system parameters in this sector presents substantial challenges to properly defining essential features such as non-linear behaviours, time delays, and parameter drifts to develop effective control and modelling [254]. In addition, deploying AI models in automotive contexts necessitates advanced methodologies surrounding data collection, training, and model deployment. Acquiring high-quality, wide-ranging datasets and building generalisable model architectures robust to varied operating conditions make this process particularly arduous [17]. The integration of AI also increases the complexity of the overall tuning process in terms of machine learning (for example, hyperparameter optimisation). It introduces the need to move rapidly from cloud-based development toward edge-based implementation to achieve adequate model performance at the required reliability rates in real-world situations [255]. Furthermore, advanced feature engineering and anomaly detection methods are needed to support defining AI models for PdM and traffic flow prediction in cooperative and autonomous EVs due to the large amount of data produced by modern automotive systems [218,256]. Multi-objective tuning is more complex since it is dependent on micro-workers for labelling the data, and there is a requirement to continuously update the AI models to cater to the new data and scenes [251].
5.1.4 Cybersecurity and Functional Safety
Incorporating AI and ML in the automotive sector has dramatically increased the attack surface, posing substantial cybersecurity risks. Adopting these technologies promises enhanced user experiences and improved traffic management but also introduces security risks across various automotive systems, including electronic control units, infotainment, and communication networks [257]. The complexity of data and traffic behaviours in AV networks, controlled by protocols like CAN bus, makes them susceptible to various attacks such as spoofing, flooding, and replaying [258]. The increasing connectivity of vehicles exacerbates societal vulnerability to cyberattacks, necessitating robust cybersecurity validation processes and the development of new safety integrity levels [259]. Despite the advancements, the automotive industry faces significant challenges in knowledge sharing and collaboration among manufacturers and suppliers, which is crucial for addressing cybersecurity threats effectively [260]. Current research highlights the predominance of intrusion detection systems in automotive cybersecurity, yet many areas, such as biometric authentication and cryptographic methods, remain underexplored [261]. However, lightweight cryptographic protocols [262], hybrid cryptography engines [263], and hardware security modules [264] are being developed to secure vehicular communications and components. Meanwhile, biometric solutions, including noninvasive sensor authentication [265], and biometric fingerprinting and keystroke dynamics [261], offer promising applications for vehicle security. As standards like ISO/SAE 21434 emphasised, comprehensive cybersecurity testing is critical for identifying and mitigating vulnerabilities, although specific technical guidelines are still lacking [266].
The ethical challenges of AI in the automotive sector are multifaceted and complex, encompassing issues such as human agency, technical robustness, privacy, transparency, fairness, societal well-being, and accountability. AVs present significant ethical dilemmas, particularly in decision-making processes where machine ethics must navigate scenarios involving potential harm to humans [267,268]. The rapid adoption of AI technologies in automotive manufacturing and design has led to substantial improvements in efficiency and quality. Still, it also raises ethical concerns related to workforce displacement and the need for equitable adaptation strategies [269]. Moreover, deploying AVs necessitates robust data governance frameworks to protect user privacy and ensure transparency in AI decision-making processes [267,270]. Despite ongoing efforts by academia, policymakers, and industry stakeholders to address these ethical issues, a consistent and comprehensive solution remains elusive, highlighting the need for continued collaboration and innovation to develop ethical guidelines that can keep pace with technological advancements [268,270].
5.2.1 Autonomous Driving and Intelligent Vehicles
One critical focus is enhancing deep learning techniques to improve autonomous driving systems’ reliability and real-time performance, particularly in complex scenarios involving road, lane, vehicle, pedestrian, and traffic sign detection [271,272]. Additionally, integrating AI with other emerging technologies such as high-definition maps, big data, high-performance computing, augmented reality, virtual reality, and 5G communication will be essential for achieving full automation and improving the decision-making capabilities of AVs [273,274]. The concept of hybrid human AI also presents a promising avenue, combining human judgment with AI to overcome current limitations and enhance the safety and efficiency of semi-autonomous systems [133]. Furthermore, addressing the challenges of cybersecurity, vehicle-to-everything privacy, and risk mitigation technologies will be crucial for the safe deployment of intelligent vehicles [274]. Finally, the development of innovative AI algorithms and hardware architectures tailored for autonomous driving will be necessary to handle the increasing complexity and ensure the robustness of these systems [275].
Smart contracts significantly enhance trust and efficiency in AI-driven automotive manufacturing processes by providing a secure and automated framework for executing and controlling manufacturing operations. In the proposed design framework [208], smart contracts are integrated with federated AI to facilitate data-driven decision-making and process execution in a decentralised manner. This integration introduces a trust threshold limit, which helps manage and moderate the use of resources such as equipment, tools, energy, and costs, thereby reducing wastage in manufacturing processes. By leveraging blockchain technology, smart contracts ensure transparency and immutability, which enhances trust among stakeholders by securely handling trading policies and market risk assessments, even during socio-economic crises. The model demonstrates improved decision accuracy and efficiency in procurement, assembly, and manufacturing, ultimately optimising cost, energy, and control functions. Developing AI-based measurement systems, including ADAS and intelligent industrial measuring systems, will also increase road safety and enable PdM [25]. The application of ML algorithms for PdM is another critical area, aiming to optimise manufacturing tool performance and reduce downtime through advanced diagnostic and fault detection methods [276]. Furthermore, the role of AI in enhancing design efficiency, cost reduction, and manufacturing quality underscores its transformative impact on the industry [277]. The exploration of key enabling technologies such as digital twins, additive manufacturing, and AI-based monitoring and inspection will also be essential for the evolution of smart factories [278]. Future research should also address the challenges of customisation, graphical user interfaces, and cloud integration to fully realise the potential of AI in smart manufacturing [208].
5.2.3 Human-Robot Collaboration
Developing more intuitive and seamless human-robot-environment interactions leverages humans’ cognitive capabilities and robots’ physical power to create a synergistic work environment [279]. The deployment of AI with cobots and technologies such as augmented reality (AR) and digital twin can significantly improve the flexibility and efficiency of manufacturing processes, addressing the pressing needs of the automotive sector [280]. Additionally, implementing AI-enabled robots and 3D printing technologies drives rapid growth in the automotive robotics sector, particularly with the shift towards EVs [281]. Future research should also focus on enhancing human-robot collaboration systems’ safety and interaction modalities, incorporating advanced manual guidance techniques and wearable devices to facilitate multi-modal interactions in a fenceless environment [282]. Moreover, the ergonomic aspects of head-mounted displays used in AR applications need further maturation to ensure operator comfort and effectiveness [283]. Finally, establishing standards and guidelines for developing AR assistance systems and conducting large-scale assessments in industrial environments will be crucial for widespread adoption and success [283].
5.2.4 Testing and Validation of AI systems
As automotive AI systems become more complex, rigorous testing methodologies that mimic real-world conditions are essential. Research should focus on creating standardised, scalable frameworks for testing AI under diverse scenarios, including rare edge cases that current datasets may not capture. Additionally, advancing digital twin and simulation technologies can help evaluate AI-driven automotive systems more comprehensively while reducing physical testing costs [284]. There is also a need to explore robust validation techniques, such as adversarial testing and continuous learning algorithms, that allow systems to adapt and self-correct in dynamic environments. Transparency in AI decision-making remains a critical research area, as interpretable models will enhance the industry’s ability to validate complex algorithms and make decisions auditable and compliant with emerging automotive regulations [285]. This multifaceted research approach will ensure that AI systems in the automotive sector are safe, adaptive, and aligned with ethical and regulatory standards, driving forward the sector’s reliability and public adoption.
5.2.5 Integration of AI with 5G
The integration of AI with 5G in the automotive sector presents a promising avenue for future research, focusing on enhancing vehicular intelligence, safety, and communication. As 5G technologies advance, they offer a robust platform for AI applications, enabling more efficient vehicle-to-vehicle communication and traffic management through mobile edge computing [286]. This integration is expected to support the development of AVs by providing ultra-low latency and high reliability, essential for real-time decision-making and remote driver monitoring systems [287]. Furthermore, AI can optimise 5G network operations, such as resource allocation and network slicing, to meet the stringent quality of service requirements of autonomous driving scenarios [288]. However, the integration also poses challenges, particularly in terms of security threats to AI-driven systems, necessitating ongoing research into robust security frameworks [289]. As the industry moves towards 6G, AI’s role will become even more critical, potentially transforming vehicles into highly autonomous, non-polluting, and safe devices, thus making them integral to future smart cities [290]. This convergence of AI and 5G technologies is anticipated to create a more intelligent and connected internet of vehicles ecosystem, driving the need for continued exploration of these synergies to address emerging challenges and opportunities.
Artificial intelligence digitally transforms the automotive sector and can improve the vehicle’s design, assembly and experience. This extensive study examines the varied ways in which AI shapes automotive technology and gleaned several key insights.
• Image and sensor data processing using deep neural networks have played a significant role in enhancing the perception capabilities of vehicles. Suitable for autonomous driving and environmental understanding, these models are proficient in pattern recognition and can work enormously with unstructured data.
• A key strength of reinforcement learning is that it can be used to realise adaptive vehicle systems that make intelligent decisions in uncertain environments. However, drivers might not face the same situation more than once, so these algorithms can simulate driving conditions and iterate until they learn the best way to approach these real-world scenarios.
• Computer vision technology is a fundamental aspect of vehicle perception, a process of reading visual information collected by different cameras. Such functionality supports advanced movement operations such as lane following, pedestrian identification, and visitor signal recognition, which will act as the human-like mind for on-road exercising and assist in better coordinating the vehicle on high-speed roadways.
• The research also indicated the potential of AI in EV diagnostics, providing a practical guide for real-time diagnostics and linking the theoretical framework to real-world implementation.
• The research notes several significant challenges, particularly the “black box” issue in complex AI models. Concerns about accountability and trust arise from the opacity of decision-making processes. The dependence on training data creates opportunities for bias that might hinder performance in multiple deployment scenarios. To address the “black box” problem, several strategies can be employed. One approach is to develop inherently interpretable models rather than relying on post hoc explanations of complex models. This approach emphasises designing models that are transparent and understandable from the outset, which is particularly crucial in high-stakes applications such as automotive systems [291]. Another strategy involves using probabilistic models, such as Bayesian networks, to provide post hoc interpretations of black-box models. These models can offer insights into which features contribute to predictions and why, thus enhancing the interpretability of the decision-making process [292]. Additionally, robust and stable explanation frameworks can be developed using adversarial training to ensure that explanations remain consistent even under distribution shifts [293]. Finally, employing techniques like Markov blankets can help focus on the most relevant features, providing a clearer understanding of the model’s behaviour [292].
However, this study acknowledges several inherent limitations in its approach. The rapid evolution of AI technology means that some of the most advanced features highlighted may not be fully captured. Additionally, the study mainly relied on academic publications, which may reflect limited knowledge originating in proprietary industrial innovations that are unable to be made public. Moreover, although the developed conceptual framework is theoretically sound, it is more thoroughly examined in practical, real-life applications and for many different types of vehicles and use cases. Immersing into the ever-evolving era of Industry 4.0, this review is a solid base by which one can grasp a basic framework for where AI fits into industry change while also exposing the yet understudied research landscapes of emerging technologies, such as the IoT, edge computing, and hybrid artificial intelligent systems.
Acknowledgement: The authors thank Universiti Malaysia Pahang Al-Sultan Abdullah for providing laboratory facilities.
Funding Statement: The authors are grateful to the Universiti Malaysia Pahang Al-Sultan Abdullah and the Malaysian Ministry of Higher Education for their generous support and funding provided through University Distinguished Research Grants (Project No. RDU223016), as well as financial assistance provided through the Fundamental Research Grant Scheme (No. FRGS/1/2022/TK10/UMP/02/35).
Author Contributions: Study conception and design: Md Naeem Hossain, Md. Abdur Rahim, Md Mustafizur Rahman; data collection: Md Naeem Hossain, Md. Abdur Rahim; analysis and interpretation of results: Md Naeem Hossain, Md Mustafizur Rahman, Devarajan Ramasamy; draft manuscript preparation: Md Naeem Hossain, Md. Abdur Rahim. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data supporting this study’s findings are available on request from the corresponding author.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
Abbreviations
| AI | Artificial intelligence |
| ML | Machine learning |
| ANN | Artificial neural network |
| DL | Deep learning |
| RL | Reinforcement learning |
| ADAS | Advanced driver assistance systems |
| IoT | Internet of Things |
| PdM | Predictive maintenance |
| NLP | Natural language processing |
| AV | Autonomous vehicle |
| ANI | Artificial narrow intelligence |
| AGI | Artificial general intelligence |
| ASI | Artificial super intelligence |
| SVM | Support vector machine |
| KNN | K-nearest neighbour |
| DT | Decision tree |
| RF | Random forest |
| CNN | Convolutional neural network |
| RNN | Recurrent neural network |
| DQN | Deep Q-network |
| GRU | Gated recurrent unit |
| SI | Swarm intelligence |
| GA | Genetic algorithm |
| ACO | Ant colony optimisation |
| ACC | Adaptive cruise control |
| EV | Electric vehicle |
| UAV | Unmanned aerial vehicle |
| CAN | Controller area network |
| DRL | Deep reinforcement learning |
| GIS | Geographical information system |
| VHMS | Vehicle health monitoring system |
| LSTM | Long short-term memory |
| GAN | Generative adversarial network |
| PSO | Particle swarm optimisation |
| RADAR | Radio detection and ranging |
| LiDAR | Light detection and ranging |
| CA | Collision avoidance |
| Cobot | Collaborative robot |
| SCM | Supply chain management |
| RUL | Remaining useful life |
| AR | Augmented reality |
References
1. Talaat M, Elkholy MH, Alblawi A, Said T. Artificial intelligence applications for microgrids integration and management of hybrid renewable energy sources. Artif Intell Rev. 2023;56(9):10557–611. doi:10.1007/s10462-023-10410-w. [Google Scholar] [CrossRef]
2. Yüksel N, Börklü HR, Sezer HK, Canyurt OE. Review of artificial intelligence applications in engineering design perspective. Eng Appl Artif Intell. 2023;118(4):105697. doi:10.1016/j.engappai.2022.105697. [Google Scholar] [CrossRef]
3. Soni N, Sharma EK, Singh N, Kapoor A. Impact of artificial intelligence on businesses: from research, innovation, market deployment to future shifts in business models. arXiv:1905.02092. 2019. [Google Scholar]
4. Kamran SS, Haleem A, Bahl S, Javaid M, Prakash C, Budhhi D. Artificial intelligence and advanced materials in automotive industry: potential applications and perspectives. Mater Today: Proc. 2022;62(5):4207–14. doi:10.1016/j.matpr.2022.04.727. [Google Scholar] [CrossRef]
5. Al Kuwaiti A, Nazer K, Al-Reedy A, Al-Shehri S, Al-Muhanna A, Subbarayalu AV, et al. A review of the role of artificial intelligence in healthcare. J Pers Med. 2023;13(6):951. doi:10.3390/jpm13060951. [Google Scholar] [PubMed] [CrossRef]
6. Franki V, Majnarić D, Višković A. A comprehensive review of artificial intelligence (AI) companies in the power sector. Energies. 2023;16(3):1077. doi:10.3390/en16031077. [Google Scholar] [CrossRef]
7. Kang J, Lee HJ, Jeong SH, Lee HS, Oh KJ. Developing a forecasting model for real estate auction prices using artificial intelligence. Sustainability. 2020;12(7):2899. doi:10.3390/su12072899. [Google Scholar] [CrossRef]
8. Han S. AI, culture industries and entertainment. In: Elliott A, editor. The social science handbook of AI. London, UK: Routledge; 2021. p. 295–312. [Google Scholar]
9. Tarallo E, Akabane GK, Shimabukuro CI, Mello J, Amancio D. Machine learning in predicting demand for fast-moving consumer goods: an exploratory research. IFAC-PapersOnLine. 2019;52(13):737–42. doi:10.1016/j.ifacol.2019.11.203. [Google Scholar] [CrossRef]
10. Alhumaid K, Naqbi S, Elsori D, Mansoori M. The adoption of artificial intelligence applications in education. Int J Data Netw Sci. 2023;7(1):457–66. doi:10.5267/j.ijdns.2022.8.013. [Google Scholar] [CrossRef]
11. Weber FD, Schütte R. State-of-the-art and adoption of artificial intelligence in retailing. Digit Policy Regul Gov. 2019;21(3):264–79. doi:10.1108/DPRG-09-2018-0050. [Google Scholar] [CrossRef]
12. Elbasi E, Mostafa N, AlArnaout Z, Zreikat AI, Cina E, Varghese G, et al. Artificial intelligence technology in the agricultural sector: a systematic literature review. IEEE Access. 2022 Dec;11(6):171–202. doi:10.1109/ACCESS.2022.3232485. [Google Scholar] [CrossRef]
13. Alhayani B, Mohammed HJ, Chaloob IZ, Ahmed JS. Effectiveness of artificial intelligence techniques against cyber security risks apply of IT industry. Mater Today: Proc. 2021. doi:10.1016/j.matpr.2021.02.531. [Google Scholar] [CrossRef]
14. Ukpong EG, Udoh II, Essien IT. Artificial intelligence: opportunities, issues and applications in banking, accounting, and auditing in Nigeria. Asian J Econ, Bus Account. 2019;8(1):309. doi:10.9734/ajeba/2019/v10i130099. [Google Scholar] [CrossRef]
15. Kortelainen J, Zeb A, Ailisto H. Artificial intelligence for the support of regulator decision making. Espoo, Finland: VTT Technical Research Centre of Finland; 2020. 30 p. [Google Scholar]
16. Shi Q, Zhang H. Fault diagnosis of an autonomous vehicle with an improved SVM algorithm subject to unbalanced datasets. IEEE Trans Ind Electron. 2021;68(7):6248–56. doi:10.1109/TIE.2020.2994868. [Google Scholar] [CrossRef]
17. Luckow A, Kennedy K, Ziolkowski M, Djerekarov E, Cook M, Duffy E, et al. Artificial intelligence and deep learning applications for automotive manufacturing. In: 2018 IEEE International Conference on Big Data (Big Data); 2018; Seattle, WA, USA. p. 3144–52. [Google Scholar]
18. Merabet GH, Essaaidi M, Haddou MB, Qolomany B, Qadir J, Anan M, et al. Intelligent building control systems for thermal comfort and energy-efficiency: a systematic review of artificial intelligence-assisted techniques. Renew Sustain Energ Rev. 2021;144:110969. doi:10.1016/j.rser.2021.110969. [Google Scholar] [CrossRef]
19. Dumitrascu O, Dumitrascu M, Dobrota D. Performance evaluation for a sustainable supply chain management system in the automotive industry using artificial intelligence. Processes. 2020;8(11):1384. doi:10.3390/pr8111384. [Google Scholar] [CrossRef]
20. Lee S, Kim Y, Kahng H, Lee SK, Chung S, Cheong T, et al. Intelligent traffic control for autonomous vehicle systems based on machine learning. Expert Syst Appl. 2020;144(1):113074. doi:10.1016/j.eswa.2019.113074. [Google Scholar] [CrossRef]
21. Rizvi AT, Haleem A, Bahl S, Javaid M. Artificial intelligence (AI) and its applications in Indian manufacturing: a review. In: Acharya SK, Mishra DP, editors. Current advances in mechanical engineering: select proceedings of ICRAMERD 2020; Singapore: Springer; 2021. p. 825–35. [Google Scholar]
22. Automotive artificial intelligence (AI) market size, share, and trends 2024 to 2034 [Internet]. 2024 [cited 2025 Jan 10]. Available from: https://www.precedenceresearch.com/automotive-artificial-intelligence-market. [Google Scholar]
23. Li J, Cheng H, Guo H, Qiu S. Survey on artificial intelligence for vehicles. Automot Innov. 2018;1(1):2–14. doi:10.1007/s42154-018-0009-9. [Google Scholar] [CrossRef]
24. Bergès C, Céneray C, Albermann G, Bird J, Balakrishnan B, Mustafa SM, et al. Detection and prevention of assembly defects, by machine learning algorithms, in semiconductor industry for automotive. In: 2020 IEEE International Symposium on the Physical and Failure Analysis of Integrated Circuits (IPFA); 2020; Singapore. p. 1–9. [Google Scholar]
25. Fedullo T, Morato A, Tramarin F, Cattini S, Rovati L. Artificial intelligence-based measurement systems for automotive: a comprehensive review. In: 2022 IEEE International Workshop on Metrology for Automotive (MetroAutomotive); 2022; Modena, Italy: IEEE. p. 122–7. [Google Scholar]
26. Rana K, Khatri N. Automotive intelligence: unleashing the potential of AI beyond advance driver assisting system, a comprehensive review. Comput Electr Eng. 2024;117:109237. doi:10.1016/j.compeleceng.2024.109237. [Google Scholar] [CrossRef]
27. Ammal SM, Kathiresh M, Neelaveni R. Artificial intelligence and sensor technology in the automotive industry: an overview. In: Kathiresh M, Neelaveni R, editors. Automotive embedded systems: key technologies, innovations, and applications. Cham: Springer; 2021. p. 145–64. [Google Scholar]
28. Vermesan O, John R, Pype P, Daalderop G, Kriegel K, Mitic G, et al. Automotive intelligence embedded in electric connected autonomous and shared vehicles technology for sustainable green mobility. Front Future Transp. 2021;2:688482. doi:10.3389/ffutr.2021.688482. [Google Scholar] [CrossRef]
29. Haenlein M, Kaplan A. A brief history of artificial intelligence: on the past, present, and future of artificial intelligence. Calif Manage Rev. 2019;61(4):5–14. doi:10.1177/0008125619864925. [Google Scholar] [CrossRef]
30. Bogue R. Robotic vision boosts automotive industry quality and productivity. Ind Robot: Int J. 2013;40(5):415–9. doi:10.1108/IR-04-2013-342. [Google Scholar] [CrossRef]
31. Tsugawa S, Yatabe T, Hirose T, Matsumoto S. An automobile with artificial intelligence. In: Proceedings of the 6th International Joint Conference on Artificial Intelligence; 1979; Tokyo, Japan. Vol. 2, p. 893–5. [Google Scholar]
32. Gage DW. UGV history 101: a brief history of Unmanned Ground Vehicle (UGV) development efforts. In: Naval command control and ocean surveillance center RDT and E. USA: RDT&E Division, Naval Command, Control and Ocean Surveillance Center; 1995. [Google Scholar]
33. Klausmeier R. Using artificial intelligence in vehicle diagnostic systems. In: West Coast International Meeting and Exposition; 1986 Aug. 12 p. [Google Scholar]
34. Dougherty M. A review of neural networks applied to transport. Transp Res Part C Emerg Technol. 1995;3(4):247–60. doi:10.1016/0968-090X(95)00009-8. [Google Scholar] [CrossRef]
35. Luu R. A fuzzy logic-based automobile fuel injection control system [M.S. thesis]. Long Beach: Department of Electrical Engineering, California State University; 1995. [Google Scholar]
36. Park SJ, Hong S, Kim D, Hussain I, Seo Y. Intelligent in-car health monitoring system for elderly drivers in connected car. Adv Intell Syst Comput. 2019;823:40–4. doi:10.1007/978-3-319-96074-6. [Google Scholar] [CrossRef]
37. Nikitas A, Michalakopoulou K, Njoya ET, Karampatzakis D. Artificial intelligence, transport and the smart city: definitions and dimensions of a new mobility era. Sustainability. 2020;12(7):2789. doi:10.3390/su12072789. [Google Scholar] [CrossRef]
38. Abduljabbar R, Dia H, Liyanage S, Bagloee SA. Applications of artificial intelligence in transport: an overview. Sustainability. 2019;11(1):1–24. doi:10.3390/su11010189. [Google Scholar] [CrossRef]
39. Khayyam H, Javadi B, Jalili M, Jazar RN. Artificial intelligence and internet of things for autonomous vehicles. In: Jazar R, Dai L, editors. Nonlinear approaches in engineering applications: automotive applications of engineering problems. Cham: Springer; 2020. p. 39–68. [Google Scholar]
40. Škavić F. The implementation of artificial intelligence and its future potential. Croatia: Department of Informatics, University of Zagreb; 2019. [Google Scholar]
41. Kirwan C, Zhiyong F. Smart city functions. In: Smart cities and artificial intelligence; Amsterdam, Netherlands: Elsevier; 2020. p. 163–92. [Google Scholar]
42. Hassani H, Silva ES, Unger S, TajMazinani M, Mac Feely S. Artificial intelligence (AI) or intelligence augmentation (IAwhat is the future? AI. 2020;1(2):143–55. doi:10.3390/ai1020008. [Google Scholar] [CrossRef]
43. Tobaruela JA, Rodríguez AO. Reactive navigation in extremely dense and highly intricate environments. PLoS One. 2017;12(12):e0189008. doi:10.1371/journal.pone.0189008. [Google Scholar] [PubMed] [CrossRef]
44. Roberts JM, Duff ES, Corke PI. Reactive navigation and opportunistic localization for autonomous underground mining vehicles. Inf Sci. 2002;145(1–2):127–46. doi:10.1016/S0020-0255(02)00227-X. [Google Scholar] [CrossRef]
45. Gupta A, Anpalagan A, Guan L, Khwaja AS. Deep learning for object detection and scene perception in self-driving cars: survey, challenges, and open issues. Array. 2021;10(10):100057. doi:10.1016/j.array.2021.100057. [Google Scholar] [CrossRef]
46. Andreu-Perez J, Deligianni F, Ravi D, Yang GZ. Artificial intelligence and robotics. arXiv:1803.10813. 2018. [Google Scholar]
47. Surden H, Williams MA. Technological opacity, predictability, and self-driving cars. Cardozo L Rev. 2016;38:121. doi:10.2139/ssrn.2747491. [Google Scholar] [CrossRef]
48. Rabinowitz NC, Perbet F, Song HF, Zhang C, Eslami SMA, Botvinick M. Machine theory of mind. In: 35th International Conference on Machine Learning; 2018; Stockholm, Sweden. p. 4218–27. [Google Scholar]
49. Schlatow J, Moostl M, Ernst R, Nolte M, Jatzkowski I, Maurer M. Self-awareness in autonomous automotive systems. In: Design, Automation & Test in Europe Conference & Exhibition (DATE); 2017; Lausanne, Switzerland: IEEE. p. 1050–5. doi:10.23919/DATE.2017.7927145. [Google Scholar] [CrossRef]
50. Shi D, Zhao J, Eze C, Wang Z, Wang J, Lian Y, et al. Cloud-based artificial intelligence framework for battery management system. Energies. 2023;16(11):4403. doi:10.3390/en16114403. [Google Scholar] [CrossRef]
51. Nori R, Zucchelli MM, Cordellieri P, Quaglieri A, Palmiero M, Guariglia P, et al. The prevention of road accidents in non-expert drivers: exploring the influence of theory of mind and driving style. Saf Sci. 2024;175(11):106516. doi:10.1016/j.ssci.2024.106516. [Google Scholar] [CrossRef]
52. Shao W, Li J, Wang H. Self-aware trajectory prediction for safe autonomous driving. In: 2023 IEEE Intelligent Vehicles Symposium (IV); 2023; Anchorage, AK, USA: IEEE; p. 1–8. [Google Scholar]
53. Gryth E, Rundberg D. Am AI ready? Investigating the impacts of artificial intelligence on [M.S. thesis]. Sweden: School of Business, Economics, and Law, University of Gothenburg; 2018. [Google Scholar]
54. Li L, Zheng N, Wang FY. A theoretical foundation of intelligence testing and its application for intelligent vehicles. IEEE Trans Intell Transp Syst. 2020;22(10):6297–306. doi:10.1109/TITS.2020.2991039. [Google Scholar] [CrossRef]
55. Chai TY, Nizam I. Impact of artificial intelligence in automotive industries transformation. Int J Inf Syst Eng. 2021;9(1):1–35. doi:10.24924/ijise/2021.04/v9.iss2/01.35. [Google Scholar] [CrossRef]
56. Rahim MA, Rahman MM, Rahman MA, Muzahid AJM, Kamarulzaman SF. A framework of IoT-enabled vehicular noise intensity monitoring system for smart city. In: Advances in robotics, automation and data analytics: selected papers from ICITES 2020. Switzerland: Springer; 2021. p. 194–205. [Google Scholar]
57. Ali S, Adeel M, Johar S, Zeeshan M, Baseer S, Irshad A, Arif M. Machine learning technologies for secure vehicular communication in internet of vehicles: recent advances and applications. Secur Commun Netw. 2021;2021(1):1–23. doi:10.1155/2021/9609823. [Google Scholar] [CrossRef]
58. Harold CKD, Prakash S, Hofman T. Powertrain control for hybrid-electric vehicles using supervised machine learning. Vehicles. 2020;2(2):267–86. doi:10.3390/vehicles2020015. [Google Scholar] [CrossRef]
59. Chouhad H, El Mansori M, Knoblauch R, Corleto C. Smart data driven defect detection method for surface quality control in manufacturing. Meas Sci Technol. 2021;32(10):105403. doi:10.1088/1361-6501/ac0b6c. [Google Scholar] [CrossRef]
60. Panahandeh G, Ek E, Mohammadiha N. Road friction estimation for connected vehicles using supervised machine learning. In: IEEE Intelligent Vehicles Symposium; 2017; Los Angeles, CA, USA. p. 1262–7. [Google Scholar]
61. El-Sayed H, Sankar S, Daraghmi Y-A, Tiwari P, Rattagan E, Mohanty M, et al. Accurate traffic flow prediction in heterogeneous vehicular networks in an intelligent transport system using a supervised non-parametric classifier. Sensors. 2018;18(6):1696. doi:10.3390/s18061696. [Google Scholar] [PubMed] [CrossRef]
62. Cuenca LG, Sanchez-Soriano J, Puertas E, Aliane N, Andrés JF. Machine learning techniques for undertaking roundabouts in autonomous driving. Sensors. 2019;19(10):2386. doi:10.3390/s19102386. [Google Scholar] [PubMed] [CrossRef]
63. Yousefi P, Fekriazgomi H, Demir MA, Prevost JJ, Jamshidi M. Data-driven fault detection of un-manned aerial vehicles using supervised learning over cloud networks. In: 2018 World Automation Congress (WAC); 2018; Stevenson, WA, USA: IEEE. p. 1–6. [Google Scholar]
64. Lourens M, Sharma S, Pulugu R, Gehlot A, Manoharan G, Kapila D. Machine learning-based predictive analytics and big data in the automotive sector. In: 2023 3rd International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE); 2023; Greater Noida, India: IEEE. p. 1043–8. [Google Scholar]
65. Hegde J, Rokseth B. Applications of machine learning methods for engineering risk assessment—a review. Saf Sci. 2020;122:104492. doi:10.1016/j.ssci.2019.09.015. [Google Scholar] [CrossRef]
66. Madasamy J, Parameswari R. Data mining and machine learning techniques (mahout on hadoop) for automotive industries: a survey. Int J Pure Appl Math. 2018;119(10):1–5. [Google Scholar]
67. Naeem S, Ali A, Anam S, Ahmed MM. An unsupervised machine learning algorithms: comprehensive review. Int J Comput Digit Syst. 2023;13(1):911–21. doi:10.12785/ijcds/130172. [Google Scholar] [CrossRef]
68. Usmani UA, Happonen A, Watada J. A review of unsupervised machine learning frameworks for anomaly detection in industrial applications. In: Intelligent computing; Cham: Springer; 2022. p. 158–89. [Google Scholar]
69. Garay JM, DIedrich C. Analysis of the applicability of fault detection and failure prediction based on unsupervised learning and monte carlo simulations for real devices in the industrial automobile production. In: IEEE International Conference on Industrial Informatics (INDIN); 2019; Helsinki, Finland. p. 1279–84. [Google Scholar]
70. Shaeiri Z, Kazemitabar SJ. Fast unsupervised automobile insurance fraud detection based on spectral ranking of anomalies. Int J Eng. 2020;33(7):1–5. [Google Scholar]
71. Ezeobi U, Olufowobi H, Young C, Zambreno J, Bloom G. Reverse engineering controller area network messages using unsupervised machine learning. IEEE Consum Electron Mag. 2020;11(1):50–6. doi:10.1109/MCE.2020.3023538. [Google Scholar] [CrossRef]
72. Watanabe H, Maly T, Wallner J, Prokop G. Cluster-linkage analysis in traffic data clustering for development of advanced driver assistance systems. In: 2020 3rd International Conference on Information and Computer Technologies (ICICT); 2020; San Jose, CA, USA. p. 54–9. [Google Scholar]
73. Dupre R, Fajtl J, Argyriou V, Remagnino P. Improving dataset volumes and model accuracy with semi-supervised iterative self-learning. IEEE Trans Image Process. 2019;29:4337–48. doi:10.1109/TIP.2019.2913986. [Google Scholar] [PubMed] [CrossRef]
74. Lamm N, Jaiprakash S, Srikanth M, Drori I. Vehicle trajectory prediction by transfer learning of semi-supervised models. arXiv:2007.06781. 2020. [Google Scholar]
75. Shibly KH, Hossain MD, Inoue H, Taenaka Y, Kadobayashi Y. A feature-aware semi-supervised learning approach for automotive ethernet. In: 2023 IEEE International Conference on Cyber Security and Resilience (CSR); 2023; Venice, Italy: IEEE. p. 426–31. [Google Scholar]
76. Hoang TN, Kim D. Detecting in-vehicle intrusion via semi-supervised learning-based convolutional adversarial autoencoders. Veh Commun. 2022;38(2):100520. doi:10.1016/j.vehcom.2022.100520. [Google Scholar] [CrossRef]
77. Liu Z, Huang S, Jin W, Mu Y. Broad learning system for semi-supervised learning. Neurocomputing. 2021;444(7553):38–47. doi:10.1016/j.neucom.2021.02.059. [Google Scholar] [CrossRef]
78. Kiran BR, Sobh I, Talpaert V, Mannion P, Al Sallab AA, Yogamani S, et al. Deep reinforcement learning for autonomous driving: a survey. IEEE Trans Intell Transp Syst. 2021;23(6):4909–26. doi:10.1109/TITS.2021.3054625. [Google Scholar] [CrossRef]
79. Navarro A, Genc S, Rangarajan P, Khalil R, Goberville N, Rojas JF, et al. Using reinforcement learning and simulation to develop autonomous vehicle control strategies. SAE Technical Papers. 2020;1:1–8. doi:10.4271/2020-01-0737. [Google Scholar] [CrossRef]
80. Nazari M, Oroojlooy A, Takáč M, Snyder LV. Reinforcement learning for solving the vehicle routing problem. In: 32nd Conference on Neural Information Processing Systems (NeurIPS 2018); 2018; Montréal, QC, Canada. p. 1–11. [Google Scholar]
81. Ye Y, Zhang X, Sun J. Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment. Transp Res Part C Emerg Technol. 2019;107(6):155–70. doi:10.1016/j.trc.2019.08.011. [Google Scholar] [CrossRef]
82. Zeng Y, Xu X, Jin S, Zhang R. Simultaneous navigation and radio mapping for cellular-connected UAV with deep reinforcement learning. IEEE Trans Wirel Commun. 2021;20(7):4205–20. doi:10.1109/TWC.2021.3056573. [Google Scholar] [CrossRef]
83. Huang H, Yang Y, Wang H, Ding Z, Sari H, Adachi F. Deep reinforcement learning for UAV navigation through massive MIMO technique. IEEE Trans Veh Technol. 2020;69(1):1117–21. doi:10.1109/TVT.2019.2952549. [Google Scholar] [CrossRef]
84. Polvara R, Sharma S, Wan J, Manning A, Sutton R. Autonomous vehicular landings on the deck of an unmanned surface vehicle using deep reinforcement learning. Robotica. 2019;37(11):1867–82. doi:10.1017/S0263574719000316. [Google Scholar] [CrossRef]
85. Koch L, Roeser D, Badalian K, Lieb A, Andert J. Cloud-based reinforcement learning in automotive control function development. Vehicles. 2023;5(3):914–30. doi:10.3390/vehicles5030050. [Google Scholar] [CrossRef]
86. Yan Z, Kreidieh AR, Vinitsky E, Bayen AM, Wu C. Unified automatic control of vehicular systems with reinforcement learning. IEEE Trans Autom Sci Eng. 2022;20(2):789–804. doi:10.1109/TASE.2022.3168621. [Google Scholar] [CrossRef]
87. Xu X, Zuo L, Li X, Qian L, Ren J, Sun Z. A reinforcement learning approach to autonomous decision making of intelligent vehicles on highways. IEEE Trans Syst Man Cybern: Syst. 2018;50(10):3884–97. [Google Scholar]
88. Schoch A, Refflinghaus R, Zivkovic P. Deep learning based predictive testing strategy in the automotive industry. Procedia CIRP. 2023;118(15–16):1108–13. doi:10.1016/j.procir.2023.06.190. [Google Scholar] [CrossRef]
89. Chen C, Liu Y, Sun X, Cairano-Gilfedder CD, Titmus S. Automobile maintenance prediction using deep learning with gis data. Procedia CIRP. 2019;81:447–52. doi:10.1016/j.procir.2019.03.077. [Google Scholar] [CrossRef]
90. Naqvi RA, Arsalan M, Batchuluun G, Yoon HS, Park KR. Deep learning-based gaze detection system for automobile drivers using a NIR camera sensor. Sensors. 2018;18(2):1–34. doi:10.3390/s18020456. [Google Scholar] [PubMed] [CrossRef]
91. Ulrich M, Gläser C, Timm F. Deepreflecs: deep learning for automotive object classification with radar reflections. In: 2021 IEEE Radar Conference (RadarConf21); 2021; Atlanta, GA, USA: IEEE. p. 1–6. [Google Scholar]
92. Paparusso L, Melzi S, Braghin F. A deep-learning framework to predict the dynamics of a human-driven vehicle based on the road geometry. arXiv:2103.03825v1. 2021. [Google Scholar]
93. Tammewar A, Chaudhari N, Saini B, Venkatesh D, Dharahas G, Vora D, et al. Improving the performance of autonomous driving through deep reinforcement learning. Sustainability. 2023;15(18):13799. doi:10.3390/su151813799. [Google Scholar] [CrossRef]
94. Talpaert V, Sobh I, Kiran BR, Mannion P, Yogamani S, El-Sallab A, et al. Exploring applications of deep reinforcement learning for real-world autonomous driving systems. arXiv:1901.01536. 2019. [Google Scholar]
95. Ren J, Gaber H, Al Jabar SS. Applying deep learning to autonomous vehicles: a survey. In: 2021 4th International Conference on Artificial Intelligence and Big Data (ICAIBD); 2021; Chengdu, China: IEEE. p. 247–52. [Google Scholar]
96. Singh KB, Arat MA. Deep learning in the automotive industry: recent advances and application examples. arXiv:1906.08834. 2019. [Google Scholar]
97. Wang J, Ma Y, Zhang L, Gao RX, Wu D. Deep learning for smart manufacturing: methods and applications. J Manuf Syst. 2018;48(2):144–56. doi:10.1016/j.jmsy.2018.01.003. [Google Scholar] [CrossRef]
98. Chandriah KK, Naraganahalli RV. RNN/LSTM with modified Adam optimizer in deep learning approach for automobile spare parts demand forecasting. Multimed Tools Appl. 2021;80(17):26145–59. doi:10.1007/s11042-021-10913-0. [Google Scholar] [CrossRef]
99. Osco LP, Junior JM, Ramos APM, de Castro Jorge LA, Fatholahi SN, de Andrade Silva J, et al. A review on deep learning in UAV remote sensing. Int J Appl Earth Obs Geoinf. 2021;102:102456. doi:10.1016/j.jag.2021.102456. [Google Scholar] [CrossRef]
100. Lindfield G, Penny J. Optimization methods. In: Numerical methods. Amsterdam, The Netherlands: Elsevier; 2019. p. 433–83. [Google Scholar]
101. Santini A, Schneider M, Vidal T, Vigo D. Decomposition strategies for vehicle routing heuristics. INFORMS J Comput. 2023;35(3):543–59. doi:10.1287/ijoc.2023.1288. [Google Scholar] [CrossRef]
102. Homayouni Z, Pishvaee MS, Jahani H, Ivanov D. A robust-heuristic optimization approach to a green supply chain design with consideration of assorted vehicle types and carbon policies under uncertainty. Ann Oper Res. 2023;324(1–2):395–435. doi:10.1007/s10479-021-03985-6. [Google Scholar] [CrossRef]
103. Pérez MAJ, Loaiza REP, Flores PMQ, Ponce OA, Peralta CF. A heuristic algorithm for the routing and scheduling problem with time windows: a case study of the automotive industry in Mexico. Algorithms. 2019;12(5):1–19. doi:10.3390/a12050111. [Google Scholar] [CrossRef]
104. Gunantara N, Putra IDNN. The characteristics of metaheuristic method in selection of path pairs on multicriteria ad hoc networks. J Comput Netw Commun. 2019;2019:1–6. doi:10.1155/2019/7983583. [Google Scholar] [CrossRef]
105. Rajwar K, Deep K, Das S. An exhaustive review of the metaheuristic algorithms for search and optimization: Taxonomy, applications, and open challenges. Artif Intell Rev. 2023;56(11):13187–257. doi:10.1007/s10462-023-10470-y. [Google Scholar] [PubMed] [CrossRef]
106. Sharma M, Kaur P. A comprehensive analysis of nature-inspired meta-heuristic techniques for feature selection problem. Arch Comput Methods Eng. 2021;28(3):1103–27. doi:10.1007/s11831-020-09412-6. [Google Scholar] [CrossRef]
107. Tang J, Liu G, Pan Q. A review on representative swarm intelligence algorithms for solving optimization problems: applications and trends. IEEE/CAA J Automatica Sinica. 2021;8(10):1627–43. doi:10.1109/JAS.2021.1004129. [Google Scholar] [CrossRef]
108. Shi K, Huang L, Jiang D, Sun Y, Tong X, Xie Y, et al. Path planning optimization of intelligent vehicle based on improved genetic and ant colony hybrid algorithm. Front Bioeng Biotechnol. 2022;10:905983. doi:10.3389/fbioe.2022.905983. [Google Scholar] [PubMed] [CrossRef]
109. Kyriakakis NA, Marinaki M, Marinakis Y. A hybrid ant colony optimization-variable neighborhood descent approach for the cumulative capacitated vehicle routing problem. Comput Operat Res. 2021;134:105397. doi:10.1016/j.cor.2021.105397. [Google Scholar] [CrossRef]
110. Hashim A, Saini T, Bhardwaj H, Jothi A, Kumar AV. Application of swarm intelligence in autonomous cars for obstacle avoidance. In: Krishna A, Srikantaiah K, Naveena C, editors. Studies in computational intelligence. Singapore: Springer; 2019. [Google Scholar]
111. Jiang C, Fu J, Liu W. Research on vehicle routing planning based on adaptive ant colony and particle swarm optimization algorithm. Int J Intell Transp Syst Res. 2021;19(1):83–91. doi:10.1007/s13177-020-00224-3. [Google Scholar] [CrossRef]
112. Xiang X, Qiu J, Xiao J, Zhang X. Demand coverage diversity based ant colony optimization for dynamic vehicle routing problems. Eng Appl Artif Intell. 2020;91(5):103582. doi:10.1016/j.engappai.2020.103582. [Google Scholar] [CrossRef]
113. Kaushal P, Khurana M, Ramkumar KR. A systematic review of swarm intelligence algorithms to perform routing for VANETs communication. ECS Trans. 2022;107(1):5027–35. doi:10.1149/10701.5027ecst. [Google Scholar] [CrossRef]
114. Faisal M, Albogamy F. Ant colony optimization algorithm enhancement for better performance. In: 2023 IEEE world AI IoT congress (AIIoT); 2023; Seattle, WA, USA: IEEE. p. 701–10. [Google Scholar]
115. Eboli MG, Maberry CM, Gibbs IA, Haddad R. Detecting potential vehicle concerns using natural language processing applied to automotive big data. In: 26th International Technical Conference on the Enhanced Safety of Vehicles (ESVTechnology: Enabling a Safer Tomorrow; 2019; Eindhoven, Netherlands. [Google Scholar]
116. Masello L, Castignani G, Sheehan B, Murphy F, McDonnell K. On the road safety benefits of advanced driver assistance systems in different driving contexts. Transp Res Interdiscip Perspect. 2022;15:100670. doi:10.1016/j.trip.2022.100670. [Google Scholar] [CrossRef]
117. Tateno S, Zhu Y, Meng F. Hand gesture recognition system for in-car device control based on infrared array sensor. In: 2019 58th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE); 2019; Hiroshima, Japan: IEEE. p. 701–6. [Google Scholar]
118. Jaradat GA, Alzubaidi MA, Otoom M. A novel human-vehicle interaction assistive device for Arab drivers using speech recognition. IEEE Access. 2022;10:127514–29. doi:10.1109/ACCESS.2022.3226539. [Google Scholar] [CrossRef]
119. Eksin C, Swenson B, Kar S, Ribeiro A. Game theoretic learning. In: Cooperative and graph signal processing. Amsterdam, The Netherlands: Elsevier; 2018. p. 209–35. [Google Scholar]
120. Yuan M, Shan J, Mi K. Deep reinforcement learning based game-theoretic decision-making for autonomous vehicles. IEEE Robot Autom Lett. 2021;7(2):818–25. doi:10.1109/LRA.2021.3134249. [Google Scholar] [CrossRef]
121. Lopez VG, Lewis FL, Liu M, Wan Y, Nageshrao S, Filev D. Game-theoretic lane-changing decision making and payoff learning for autonomous vehicles. IEEE Trans Veh Technol. 2022;71(4):3609–20. doi:10.1109/TVT.2022.3148972. [Google Scholar] [CrossRef]
122. Wang M, Wang Z, Talbot J, Gerdes JC, Schwager M. Game-theoretic planning for self-driving cars in multivehicle competitive scenarios. IEEE Trans Robot. 2021;37(4):1313–25. doi:10.1109/TRO.2020.3047521. [Google Scholar] [CrossRef]
123. Chandra R, Manocha D. Game-theoretic multi-agent planning with human drivers at intersections, roundabouts, and merging. IEEE Robot Autom Lett. 2022;7(2):2676–83. doi:10.1109/LRA.2022.3144516. [Google Scholar] [CrossRef]
124. Ardekani AA, Chahe A, Yazdi MRH. Combining deep learning and game theory for path planning in autonomous racing cars. In: 2022 10th RSI International Conference on Robotics and Mechatronics (ICRoM); 2022; Tehran, Iran: IEEE. p. 564–71. [Google Scholar]
125. Hossain MN, Rahman MM, Ramasamy D, Kadirgama K, Noor MM. Advancements, challenges, and implications for navigating the autonomous vehicle revolution. J Mech Eng Sci. 2024;8(2):10077–93. doi:10.15282/jmes.18.2.2024.9.0796. [Google Scholar] [CrossRef]
126. Salais-Fierro TE, Saucedo-Martinez JA, Rodriguez-Aguilar R, Vela-Haro JM. Demand prediction using a soft-computing approach: a case study of automotive industry. Appl Sci. 2020;10(3):829. doi:10.3390/app10030829. [Google Scholar] [CrossRef]
127. Castro DM, Silv Parreiras F. A review on multi-criteria decision-making for energy efficiency in automotive engineering. Appl Comput Inform. 2021;17(1):53–78. doi:10.1016/j.aci.2018.04.004. [Google Scholar] [CrossRef]
128. Godina R, Silva BGR, Espadinha-Cruz P. A DMAIC integrated fuzzy FMEA model: a case study in the Automotive Industry. Appl Sci. 2021;11(8):3726. doi:10.3390/app11083726. [Google Scholar] [CrossRef]
129. Çeven S, Albayrak A, Bayır R. Real-time range estimation in electric vehicles using fuzzy logic classifier. Comput Electr Eng. 2020;83(0):106577. doi:10.1016/j.compeleceng.2020.106577. [Google Scholar] [CrossRef]
130. Wankhede VA, Vinodh S. Benchmarking Industry 4.0 readiness evaluation using fuzzy approaches. Benchmarking: Int J. 2023;30(1):281–306. doi:10.1108/BIJ-08-2021-0505. [Google Scholar] [CrossRef]
131. Mateichyk V, Kostian N, Smieszek M, Mosciszewski J, Tarandushka L. Evaluating vehicle energy efficiency in urban transport systems based on fuzzy logic models. Energies. 2023;16(2):734. doi:10.3390/en16020734. [Google Scholar] [CrossRef]
132. Sathyan R, Parthiban P, Dhanalakshmi R, Minz A. A combined big data analytics and Fuzzy DEMATEL technique to improve the responsiveness of automotive supply chains. J Ambient Intell Humaniz Comput. 2021;12(7):7949–63. doi:10.1007/s12652-020-02524-8. [Google Scholar] [CrossRef]
133. Ning H, Yin R, Ullah A, Shi F. A survey on hybrid human-artificial intelligence for autonomous driving. IEEE Trans Intell Transp Syst. 2021;23(7):6011–26. doi:10.1109/TITS.2021.3074695. [Google Scholar] [CrossRef]
134. Al Shukairi H, Cardoso RC. ML-MAS: a hybrid AI framework for self-driving vehicles. In: AAMAS’23: Proceedings of the 2023 International Conference on Autonomous Agents and Multiagent Systems; 2023; London, UK: International Foundation for Autonomous Agents and Multiagent Systems (IFAAMAS). p. 1191–9. [Google Scholar]
135. Rahim MA, Rahman MM, Islam MS, Muzahid AJM, Rahman MA, Ramasamy D. Deep learning-based vehicular engine health monitoring system utilising a hybrid convolutional neural network/bidirectional gated recurrent unit. Expert Syst Appl. 2024;257(3):125080. doi:10.1016/j.eswa.2024.125080. [Google Scholar] [CrossRef]
136. Al-Saadi Z, Phan Van D, Moradi Amani A, Fayyazi M, Sadat Sajjadi S, Ba Pham D, et al. Intelligent driver assistance and energy management systems of hybrid electric autonomous vehicles. Sustainability. 2022;14(15):9378. doi:10.3390/su14159378. [Google Scholar] [CrossRef]
137. Nazari S, Gowans N, Abtahi M. Powertrain hybridization for autonomous vehicles. arXiv:2309.17442. 2023. [Google Scholar]
138. Al-Jumaili MH, Özok YE, Ibrahim AA, Bayat O. A robust hybrid control model implementation for autonomous vehicles. In: 2024 8th International Artificial Intelligence and Data Processing Symposium (IDAP); 2024; Malatya, Turkiye: IEEE. p. 1–5. [Google Scholar]
139. Reda A, Benotsmane R, Bouzid A, Vásárhelyi J. A hybrid machine learning-based control strategy for autonomous driving optimization. Acta Polytechnica Hung. 2023;20(9):165–86. doi:10.12700/APH.20.9.2023.9.10. [Google Scholar] [CrossRef]
140. Phan D, Bab-Hadiashar A, Fayyazi M, Hoseinnezhad R, Jazar RN, Khayyam H. Interval type 2 fuzzy logic control for energy management of hybrid electric autonomous vehicles. IEEE Trans Intell Veh. 2020;6(2):210–20. doi:10.1109/TIV.2020.3011954. [Google Scholar] [CrossRef]
141. Santana EFZ, Covas G, Duarte F, Santi P, Ratti C, Kon F. Transitioning to a driverless city: evaluating a hybrid system for autonomous and non-autonomous vehicles. Simul Model Pract Theory. 2021;107(28):102210. doi:10.1016/j.simpat.2020.102210. [Google Scholar] [CrossRef]
142. Marina LA, Trasnea B, Grigorescu SM. A multi-platform framework for artificial intelligence engines in automotive systems. In: 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC); 2018; Sinaia, Romania: IEEE. p. 559–64. [Google Scholar]
143. Ruggaber J, Ahmic K, Brembeck J, Baumgartner D, Tobolář J. AI-for-mobility—a new research platform for AI-based control methods. Appl Sci. 2023;13(5):2879. doi:10.3390/app13052879. [Google Scholar] [CrossRef]
144. Díaz AA, Kurka PRG. Computer vision methods for automotive applications. Tecnia. 2020;30(2):74–81. doi:10.21754/tecnia.v30i2.801. [Google Scholar] [CrossRef]
145. Nagy M, Lăzăroiu G. Computer vision algorithms, remote sensing data fusion techniques, and mapping and navigation tools in the Industry 4.0-based Slovak automotive sector. Mathematics. 2022;10(19):3543. doi:10.3390/math10193543. [Google Scholar] [CrossRef]
146. Nkuzo L, Sibiya M, Markus E. Computer vision-based applications in modern cars for safety purposes: a systematic literature review. In: 2023 Conference on Information Communications Technology and Society (ICTAS); 2023; Durban, South Africa: IEEE. p. 1–9. [Google Scholar]
147. Konstantinidis FK, Mouroutsos SG, Gasteratos A. The role of machine vision in industry 4.0: an automotive manufacturing perspective. In: 2021 IEEE International Conference on Imaging Systems and Techniques (IST); 2021; Kaohsiung, Taiwan: IEEE. p. 1–6. [Google Scholar]
148. Abagiu MM, Cojocaru D, Manta FL, Mariniuc A. Detection of a surface defect on an engine block using computer vision. In: 2021 22nd International Carpathian Control Conference (ICCC); 2021; Velké Karlovice, Czech Republic: IEEE. p. 1–5. [Google Scholar]
149. Feng MQ, Leung RY. Application of computer vision for estimation of moving vehicle weight. IEEE Sens J. 2020;21(10):11588–97. doi:10.1109/JSEN.2020.3038186. [Google Scholar] [CrossRef]
150. Darapaneni N, Ravikumar M, Singh S, Tiwari A, Das S, Paduri AR, et al. Computer vision application in automobile error detection. In: 2022 Interdisciplinary Research in Technology and Management (IRTM); 2022; Kolkata, India: IEEE. p. 1–7. [Google Scholar]
151. Mahadevkar SV, Khemani B, Patil S, Kotecha K, Vora DR, Abraham A, et al. A review on machine learning styles in computer vision—techniques and future directions. IEEE Access. 2022;10(1):107293–329. doi:10.1109/ACCESS.2022.3209825. [Google Scholar] [CrossRef]
152. Srivastava N, Lamba T, Agarwal M. Comparative analysis of different machine learning techniques. In: Futuristic Trends in Networks and Computing Technologies (FTNCT 2019); 2020; Chandigarh, India: Springer. p. 245–55. [Google Scholar]
153. Voulodimos A, Doulamis N, Doulamis A, Protopapadakis E. Deep learning for computer vision: a brief review. Comput Intell Neurosci. 2018;2018(1):7068349. doi:10.1155/2018/7068349. [Google Scholar] [PubMed] [CrossRef]
154. Ma W, Cheng F, Liu Y. Deep-learning-enabled on-demand design of chiral metamaterials. ACS Nano. 2018;12(6):6326–34. doi:10.1021/acsnano.8b03569. [Google Scholar] [PubMed] [CrossRef]
155. Mao Y, Miller RA, Bodenreider O, Nguyen V, Fung KW. Two complementary AI approaches for predicting UMLS semantic group assignment: heuristic reasoning and deep learning. J Am Med Inform Assoc. 2023;30(12):1887–94. doi:10.1093/jamia/ocad152. [Google Scholar] [PubMed] [CrossRef]
156. ul Hassan CA, Khan MS, Irfan R, Iqbal J, Hussain S, Sajid Ullah S, et al. Optimizing deep learning model for software cost estimation using hybrid meta-heuristic algorithmic approach. Comput Intell Neurosci. 2022;2022(1):3145956. doi:10.1155/2022/3145956. [Google Scholar] [PubMed] [CrossRef]
157. Karimi-Mamaghan M, Mohammadi M, Meyer P, Karimi-Mamaghan AM, Talbi EG. Machine learning at the service of meta-heuristics for solving combinatorial optimization problems: a state-of-the-art. Eur J Oper Res. 2022;296(2):393–422. doi:10.1016/j.ejor.2021.04.032. [Google Scholar] [CrossRef]
158. Chiroma H, Gital AY, Rana N, Abdulhamid SM, Muhammad AN, Umar AY, et al. Nature inspired meta-heuristic algorithms for deep learning: recent progress and novel perspective. In: Advances in Computer Vision: Proceedings of the 2019 Computer Vision Conference (CVC); 2020; Las Vegas, NV, USA. Cham: Springer. Vol. 11, p. 59–70. [Google Scholar]
159. Dellermann D, Ebel P, Söllner M, Leimeister JM. Hybrid intelligence. Bus Inf Syst Eng. 2019;61(5):637–43. doi:10.1007/s12599-019-00595-2. [Google Scholar] [CrossRef]
160. Sun Z, Liu Y, Wang J, Li G, Anil C, Li K, et al. Applications of game theory in vehicular networks: a survey. IEEE Commun Surv Tutor. 2021;23(4):2660–710. doi:10.1109/COMST.2021.3108466. [Google Scholar] [CrossRef]
161. Lü X, Long L, Deng R, Meng R. Image feature extraction based on fuzzy restricted Boltzmann machine. Measurement. 2022;204(2):112063. doi:10.1016/j.measurement.2022.112063. [Google Scholar] [CrossRef]
162. Soltanali H, Rohani A, Tabasizadeh M, Abbaspour-Fard MH, Parida A. An improved fuzzy inference system-based risk analysis approach with application to automotive production line. Neural Comput Appl. 2020;32(14):10573–91. doi:10.1007/s00521-019-04593-z. [Google Scholar] [CrossRef]
163. Varghese NV, Mahmoud QH. A hybrid multi-task learning approach for optimizing deep reinforcement learning agents. IEEE Access. 2021;9:44681–703. doi:10.1109/ACCESS.2021.3065710. [Google Scholar] [CrossRef]
164. Phatai G, Luangrungruang T. A comparative study of hybrid neural network with metaheuristics for student performance classification. In: 2023 11th International Conference on Information and Education Technology (ICIET); 2023; Fujisawa, Japan: IEEE. p. 448–52. [Google Scholar]
165. Manivarma D, Akilandeswari A, Radhika S. Performance analysis of vehicle detection using support vector machine comparing with K-nearest neighbor algorithm. In: 2023 International Conference on Advances in Computing, Communication and Applied Informatics (ACCAI); 2023; Chennai, India: IEEE. p. 1–4. [Google Scholar]
166. Singh S, Gill R, Kumar R, Shrivastava A, Srivastava AP, Thakur G. A comparative analysis of machine learning algorithms for predictive maintenance in electrical systems. In: 2024 4th International Conference on Innovative Practices in Technology and Management (ICIPTM); 2024; Noida, India: IEEE. p. 1–6. [Google Scholar]
167. Awan FM, Saleem Y, Minerva R, Crespi N. A comparative analysis of machine/deep learning models for parking space availability prediction. Sensors. 2020;20(1):322. doi:10.3390/s20010322. [Google Scholar] [PubMed] [CrossRef]
168. Hickling T, Aouf N, Spencer P. Robust adversarial attacks detection based on explainable deep reinforcement learning for UAV guidance and planning. IEEE Trans Intell Vehicles. 2023;8(10):4381–94. doi:10.1109/TIV.2023.3296227. [Google Scholar] [CrossRef]
169. Thammachantuek I, Kosolsomnbat S, Ketcham M. Comparison of machine learning algorithm’s performance based on decision making in autonomous car. In: 2018 International Joint Symposium on Artificial Intelligence and Natural Language Processing (iSAI-NLP); 2018; Pattaya, Thailand: IEEE. p. 1–6. [Google Scholar]
170. Liu C, Tang D, Zhu H, Nie Q. A novel predictive maintenance method based on deep adversarial learning in the intelligent manufacturing system. IEEE Access. 2021;9:49557–75. doi:10.1109/ACCESS.2021.3069256. [Google Scholar] [CrossRef]
171. Dong T, Qi Q, Wang J, Liu AX, Sun H, Zhuang Z, et al. Generative adversarial network-based transfer reinforcement learning for routing with prior knowledge. IEEE Trans Netw Serv Manag. 2021;18(2):1673–89. doi:10.1109/TNSM.2021.3077249. [Google Scholar] [CrossRef]
172. Minaeva A, Roy D, Akesson B, Hanzálek Z, Chakraborty S. Control performance optimization for application integration on automotive architectures. IEEE Trans Comput. 2020;70(7):1059–73. doi:10.1109/TC.2020.3003083. [Google Scholar] [CrossRef]
173. Hu Z, Huang J, Yang Z, Zhong Z. Cooperative-game-theoretic optimal robust path tracking control for autonomous vehicles. J Vib Control. 2022;28(5–6):520–35. doi:10.1177/10775463211009383. [Google Scholar] [CrossRef]
174. Guo Z, Sun D, Zhou L. Game algorithm of intelligent driving vehicle based on left-turn scene of crossroad traffic flow. Comput Intell Neurosci. 2022;2022(1):9318475. doi:10.1155/2022/9318475. [Google Scholar] [PubMed] [CrossRef]
175. Tripathi S, Shrivastava A, Jana KC. Chimp optimization-based fuzzy controller for hybrid electric vehicle speed control using electronic throttle plate. Optim Control Appl Methods. 2024;45(1):163–84. doi:10.1002/oca.3051. [Google Scholar] [CrossRef]
176. Tordecilla RD, do Martins LC, Panadero J, Copado PJ, Perez-Bernabeu E, Juan AA. Fuzzy simheuristics for optimizing transportation systems: dealing with stochastic and fuzzy uncertainty. Appl Sci. 2021;11(17):7950. doi:10.3390/app11177950. [Google Scholar] [CrossRef]
177. Takialddin AS. Artificial Intelligent Technology for safe driver assistance system. Int J Comput Aided Eng Technol. 2020;13(1–2):183–91. doi:10.1504/IJCAET.2020.108112. [Google Scholar] [CrossRef]
178. Iyer LS. AI enabled applications towards intelligent transportation. Transp Eng. 2021;5(189):100083. doi:10.1016/j.treng.2021.100083. [Google Scholar] [CrossRef]
179. Kukkala VK, Tunnell J, Pasricha S, Bradley T. Advanced driver-assistance systems: a path toward autonomous vehicles. IEEE Consum Electron Mag. 2018;7(5):18–25. doi:10.1109/MCE.2018.2828440. [Google Scholar] [CrossRef]
180. Wu D, Zhu H, Zhu Y, Chang V, He C, Hsu CH, et al. Anomaly detection based on RBM-LSTM neural network for CPS in advanced driver assistance system. ACM Tran Cyber-Phys Syst. 2020;4(3):1–17. doi:10.1145/3377408. [Google Scholar] [CrossRef]
181. Hasenjäger M, Heckmann M, Wersing H. A survey of personalization for advanced driver assistance systems. IEEE Trans Intell Veh. 2019;5(2):335–44. doi:10.1109/TIV.2019.2955910. [Google Scholar] [CrossRef]
182. De-Las-Heras G, Sánchez-Soriano J, Puertas E. Advanced driver assistance systems (ADAS) based on machine learning techniques for the detection and transcription of variable message signs on roads. Sensors. 2021;21(17):5866. doi:10.3390/s21175866. [Google Scholar] [PubMed] [CrossRef]
183. Salve S, Jadhav T, Gajare S, Patil PH. Advanced driver assistance system for drivers using machine learning and artificial intelligence techniques. Int J Res Appl Sci Eng Technol. 2022;10(5):3885–92. doi:10.22214/ijraset.2022.43260. [Google Scholar] [CrossRef]
184. Antony MM, Whenish R. Advanced driver assistance systems (ADAS). In: Kathiresh M, Neelaveni R, editors. Automotive embedded systems: key technologies, innovations, and applications. Cham: Springer; 2021. p. 165–81. [Google Scholar]
185. Elmorshedy L, Abdulhai B, Kamel I. Quantitative evaluation of the impacts of the time headway of adaptive cruise control systems on congested urban freeways using different car following models and early control results. IEEE Open J Intell Transp Syst. 2022;3(4):288–301. doi:10.1109/OJITS.2022.3166394. [Google Scholar] [CrossRef]
186. Yao S, Guan R, Huang X, Li Z, Sha X, Yue Y, et al. Radar-camera fusion for object detection and semantic segmentation in autonomous driving: a comprehensive review. IEEE Trans Intell Veh. 2023;9(1):2094–128. doi:10.1109/TIV.2023.3307157. [Google Scholar] [CrossRef]
187. Mahadika P, Subiantoro A, Kusumoputro B. Neural network predictive control approach design for adaptive cruise control. Int J Technol. 2020;11(7):1451. doi:10.14716/ijtech.v11i7.4592. [Google Scholar] [CrossRef]
188. Suleiman L, Vlasov S. Research on the impact of different controllers on the adapative cruise control system. In: 2023 International Russian Automation Conference (RusAutoCon); 2023; Sochi, Russian Federation: IEEE. p. 634–9. [Google Scholar]
189. Nava D, Panzani G, Zampieri P, Savaresi SM. A personalized adaptive cruise control driving style characterization based on a learning approach. In: 2019 IEEE Intelligent Transportation Systems Conference (ITSC); 2019; Auckland, New Zealand: IEEE. p. 2901–6. [Google Scholar]
190. Zhang L, Liu C, Wang B, Chen X. An innovative method for scene recognition and target tracking for adaptive cruise control in complex traffic environment. Proc Inst Mech Eng, Part D: J Automobile Eng. 2024;238(7):1896–912. doi:10.1177/09544070231156956. [Google Scholar] [CrossRef]
191. Yin W. Machine learning for adaptive cruise control target selection [dissertation]. 2019. Sweden: School of Electrical Engineering and Computer Science, KTH. [Google Scholar]
192. Rill RA, Faragó KB. Collision avoidance using deep learning-based monocular vision. SN Comput Sci. 2021;2(5):375. doi:10.1007/s42979-021-00759-6. [Google Scholar] [CrossRef]
193. Yu J, Petnga L. Space-based collision avoidance framework for autonomous vehicles. Procedia Comput Sci. 2018;140(12):37–45. doi:10.1016/j.procs.2018.10.290. [Google Scholar] [CrossRef]
194. Kotur M, Lukić N, Krunić M, Lukač Ž. Camera and LiDAR sensor fusion for 3D object tracking in a collision avoidance system. In: 2021 Zooming Innovation in Consumer Technologies Conference (ZINC); 2021; Novi Sad, Serbia: IEEE. p. 198–202. [Google Scholar]
195. Truong LNH, Clay E, Mora OE, Cheng W, Singh M, Jia X. Rotated mask region-based convolutional neural network detection for parking space management system. Transp Res Rec. 2023;2677(1):1564–81. doi:10.1177/03611981221105066. [Google Scholar] [CrossRef]
196. Zhang P, Xiong L, Yu Z, Fang P, Yan S, Yao J, et al. Reinforcement learning-based end-to-end parking for automatic parking system. Sensors. 2019;19(18):3996. doi:10.3390/s19183996. [Google Scholar] [PubMed] [CrossRef]
197. Wang L, Yu B, Chen C. Parking area data collection and scenario extraction for the purpose of automatic parking ADAS function. In: IOP Conference Series: Materials Science and Engineering; 2020; Chengdu, China: IOP Publishing. 32026 p. [Google Scholar]
198. Guo Y, Shi H. Automatic parking system based on improved neural network algorithm and intelligent image analysis. Comput Intell Neurosci. 2021;2021(1):4391864. doi:10.1155/2021/4391864. [Google Scholar] [PubMed] [CrossRef]
199. Rahim MA, Rahman MA, Rahman MM, Asyhari AT, Bhuiyan MZA, Ramasamy D. Evolution of IoT-enabled connectivity and applications in automotive industry: a review. Veh Commun. 2021;27:100285. doi:10.1016/j.vehcom.2020.100285. [Google Scholar] [CrossRef]
200. Rahman MA, Rahim MA, Rahman MM, Moustafa N, Razzak I, Ahmad T, et al. A secure and intelligent framework for vehicle health monitoring exploiting big-data analytics. IEEE Trans Intell Transp Syst. 2022;23(10):19727–42. doi:10.1109/TITS.2021.3138255. [Google Scholar] [CrossRef]
201. Rahim MA, Rahman MA, Rahman MM, Zaman N, Moustafa N, Razzak I. An intelligent risk management framework for monitoring vehicular engine health. IEEE Trans Green Commun Netw. 2022;6(3):1298–306. doi:10.1109/TGCN.2022.3179350. [Google Scholar] [CrossRef]
202. Reiter G, Williams K. AI-based signal integrity monitoring for integrated vehicle health management. In: ELIV; 2021. Germany: VDI Wissensforum GmbH. p. 143–50. [Google Scholar]
203. Gomes IP, Wolf DF. Health monitoring system for autonomous vehicles using dynamic Bayesian networks for diagnosis and prognosis. J Intell Robot Syst. 2021;101(1):19. doi:10.1007/s10846-020-01293-y. [Google Scholar] [CrossRef]
204. Gupta N, Khosravy M, Patel N, Dey N, Crespo RG. Lightweight computational intelligence for IoT health monitoring of off-road vehicles: enhanced selection log-scaled mutation GA structured ANN. IEEE Trans Ind Inform. 2021;18(1):611–9. doi:10.1109/TII.2021.3072045. [Google Scholar] [CrossRef]
205. Koricanac I. Impact of AI on the automobile industry in the U.S. SSRN Electron J. 2021. doi:10.2139/ssrn.3841426. [Google Scholar] [CrossRef]
206. Tokody D, Ady L, Hudasi LF, Varga PJ, Hell P. Collaborative robotics research: subiko project. Procedia Manuf. 2020;46(2):467–74. doi:10.1016/j.promfg.2020.03.068. [Google Scholar] [CrossRef]
207. Despot K, Srebrenkoska S, Sandeva V. The role of artificial intelligence in automotive design. KNOWLEDGE—Int J. 2023;61(3):423–9. [Google Scholar]
208. Manimuthu A, Venkatesh VG, Shi Y, Sreedharan VR, Koh SCL. Design and development of automobile assembly model using federated artificial intelligence with smart contract. Int J Prod Res. 2021;60(1):111–35. doi:10.1080/00207543.2021.1988750. [Google Scholar] [CrossRef]
209. Demlehner Q, Schoemer D, Laumer S. How can artificial intelligence enhance car manufacturing? A Delphi study-based identification and assessment of general use cases. Int J Inf Manage. 2021;58:102317. doi:10.1016/j.ijinfomgt.2021.102317. [Google Scholar] [CrossRef]
210. Kinkel S, Baumgartner M, Cherubini E. Prerequisites for the adoption of AI technologies in manufacturing-Evidence from a worldwide sample of manufacturing companies. Technovation. 2022;110(5):102375. doi:10.1016/j.technovation.2021.102375. [Google Scholar] [CrossRef]
211. Yue G, Tailai G, Dan W. Multi-layered coding-based study on optimization algorithms for automobile production logistics scheduling. Technol Forecast Soc Change. 2021;170(6):120889. doi:10.1016/j.techfore.2021.120889. [Google Scholar] [CrossRef]
212. Stauder M, Kühl N. AI for in-line vehicle sequence controlling: development and evaluation of an adaptive machine learning artifact to predict sequence deviations in a mixed-model production line. Flexible Serv Manuf J. 2022;34(3):709–47. doi:10.1007/s10696-021-09430-x. [Google Scholar] [CrossRef]
213. Arunmozhi M, Venkatesh VG, Arisian S, Shi Y, Sreedharan VR. Application of blockchain and smart contracts in autonomous vehicle supply chains: an experimental design. Transp Res Part E: Logist Transp Rev. 2022;165(3):102864. doi:10.1016/j.tre.2022.102864. [Google Scholar] [CrossRef]
214. Soegoto ES, Utami RD, Hermawan YA. Influence of artificial intelligence in automotive industry. In: Journal of Physics: Conference Series; 2019; Bristol, UK: IOP Publishing Ltd. [Google Scholar]
215. Mandala V. Revolutionizing automotive supply chain: enhancing inventory management with AI and machine learning. Univ J Comput Sci Commun. 2024;3(1):10–22. doi:10.31586/ujcsc.2024.918. [Google Scholar] [CrossRef]
216. Evangeliou N, Stamatis G, Bravos G, Plorin D, Stark D. AI for inbound logistics optimisation in automotive industry. In: Artificial intelligence for digitising industry−applications. River Publishers; 2022. p. 11–9. [Google Scholar]
217. Borodavko B, Illés B, Bányai Á. Role of artificial intelligence in supply chain. Acad J Manuf Eng. 2021;19(1):75–9. [Google Scholar]
218. Arena F, Collotta M, Luca L, Ruggieri M, Termine FG. Predictive maintenance in the automotive sector: a literature review. Math Comput Appl. 2021;27(1):2. doi:10.3390/mca27010002. [Google Scholar] [CrossRef]
219. Ersöz OÖ, İnal AF, Aktepe A, Türker AK, Ersöz S. A systematic literature review of the predictive maintenance from transportation systems aspect. Sustainability. 2022;14(21):14536. doi:10.3390/su142114536. [Google Scholar] [CrossRef]
220. Hossain MN, Rahman MM, Ramasamy D. Artificial intelligence-driven vehicle fault diagnosis to revolutionize automotive maintenance: a review. Comput Model Eng Sci. 2024;141(2):951–96. doi:10.32604/cmes.2024.056022. [Google Scholar] [CrossRef]
221. Li W, Li G, Kamarthi S. The study of trends in AI applications for vehicle maintenance through keyword co-occurrence network analysis. Int J Progn Health Manag. 2023;14(2):1–17. doi:10.36001/ijphm.2023.v14i2.3583. [Google Scholar] [CrossRef]
222. Theissler A, Pérez-Velázquez J, Kettelgerdes M, Elger G. Predictive maintenance enabled by machine learning: use cases and challenges in the automotive industry. Reliab Eng Syst Saf. 2021;215(19):107864. doi:10.1016/j.ress.2021.107864. [Google Scholar] [CrossRef]
223. Aravind R, Shah CV. Physics model-based design for predictive maintenance in autonomous vehicles using AI. Int J Sci Res Manag. 2023;11(9):932–46. doi:10.18535/ijsrm/v11i09.ec06. [Google Scholar] [CrossRef]
224. Narayanan TSA, Padhy SC. Artificial intelligence for predictive maintenance of armoured fighting vehicles engine. Indian J Artif Intell Neural Netw. 2023;3(5):1–12. doi:10.54105/ijainn.E1071.083523. [Google Scholar] [CrossRef]
225. Wang Q, Wang H, Pan H. A constrained-time-based algorithm for vehicle maintain prediction. In: 5th International Conference on Information Science, Electrical and Automation Engineering (ISEAE 2023); 2023; Wuhan, China: SPIE. p. 352–9. [Google Scholar]
226. Sharma N, Kalra M. Predictive maintenance for commercial vehicles tyres using machine learning. In: 2022 13th International Conference on Computing Communication and Networking Technologies (ICCCNT); 2022; Kharagpur, India: IEEE. p. 1–6. [Google Scholar]
227. Chen C, Liu Y, Sun X, Di Cairano-Gilfedder C, Titmus S. An integrated deep learning-based approach for automobile maintenance prediction with GIS data. Reliab Eng Syst Saf. 2021;216:107919. doi:10.1016/j.ress.2021.107919. [Google Scholar] [CrossRef]
228. Vasavi S, Aswarth K, Sai Durga Pavan T, Anu Gokhale A. Predictive analytics as a service for vehicle health monitoring using edge computing and AK-NN algorithm. Mater Today: Proc. 2021;46(7):8645–54. doi:10.1016/j.matpr.2021.03.658. [Google Scholar] [CrossRef]
229. Biddle L, Fallah S. A novel fault detection, identification and prediction approach for autonomous vehicle controllers using SVM. Autom Innov. 2021;4(3):301–14. doi:10.1007/s42154-021-00138-0. [Google Scholar] [CrossRef]
230. Hu H, Luo H, Deng X. Health monitoring of automotive suspensions: a LSTM network approach. Shock Vib. 2021;2021(1):6626024. doi:10.1155/2021/6626024. [Google Scholar] [CrossRef]
231. Mckinley T, Somwanshi M, Bhave D, Verma S. Identifying NOx sensor failure for predictive maintenance of diesel engines using explainable AI. In: PHM Society European Conference; 2020. 11 p. [Google Scholar]
232. Krishnamurthy V, Nezafati K, Stayton E, Singh V. Explainable AI framework for imaging-based predictive maintenance for automotive applications and beyond. Data-Enabled Discov Appl. 2020;4(1):7. doi:10.1007/s41688-020-00042-2. [Google Scholar] [CrossRef]
233. Voronov S, Krysander M, Frisk E. Predictive maintenance of lead-acid batteries with sparse vehicle operational data. Int J Progn Health Manag. 2020;11(1):1–17. doi:10.36001/ijphm.2020.v11i1.2608. [Google Scholar] [CrossRef]
234. Wang S, Liu Y, di Cairano-Gilfedder C, Titmus S, Naim MM, Syntetos AA. Reliability analysis for automobile engines: conditional inference trees. Procedia CIRP. 2018;72(2):1392–7. doi:10.1016/j.procir.2018.03.065. [Google Scholar] [CrossRef]
235. Shafi U, Safi A, Shahid AR, Ziauddin S, Saleem MQ. Vehicle remote health monitoring and prognostic maintenance system. J Adv Transp. 2018;2018(1):8061514. doi:10.1155/2018/8061514. [Google Scholar] [CrossRef]
236. Giobergia F, Baralis E, Camuglia M, Cerquitelli T, Mellia M, Neri A, et al. Mining sensor data for predictive maintenance in the automotive industry. In: 2018 IEEE 5th International Conference on Data Science and Advanced Analytics (DSAA); 2018; Turin, Italy: IEEE. p. 351–60. [Google Scholar]
237. Goikoetxea-Gonzalez J, Casado-Mansilla D, López-de-Ipiña D. The role of IoT devices in sustainable car expenses in the context of the intelligent mobility: a comparative approach. Appl Sci. 2022;12(3):1080. doi:10.3390/app12031080. [Google Scholar] [CrossRef]
238. Jategaonkar A, Lenin NC. High-voltage electric water pump for the application of electric vehicle-modeling, design and analysis. In: Kamaraj V, Ravishankar J, Jeevananthan S, editors. Emerging solutions for e-Mobility and smart grids. Singapore: Springer; 2021. p. 201–12. [Google Scholar]
239. Morris J. Internal combustion cars will be an expensive luxury compared to electric by 2027 [Internet]. [cited 2022 Feb 26]. Available from: https://www.forbes.com/sites/jamesmorris/2021/05/15/internal-combustion-cars-will-be-an-expensive-luxury-compared-to-electric-by-2027/?sh=2782225e5189. [Google Scholar]
240. EVs to be cheaper to produce than fossil fuel vehicles by 2027 | Daily Sabah [Internet]. [cited 2022 Feb 26]. Available from: https://www.dailysabah.com/business/automotive/evs-to-be-cheaper-to-produce-than-fossil-fuel-vehicles-by-2027. [Google Scholar]
241. Mustapa SI, Ayodele BV, Ishak WWM, Ayodele FO. Evaluation of cost competitiveness of electric vehicles in Malaysia using life cycle cost analysis approach. Sustainability. 2020;12(13):5303. doi:10.3390/su12135303. [Google Scholar] [CrossRef]
242. Fechtner H, Schmuelling B. Improved range prediction for electric vehicles by a smart tire pressure monitoring system. In: 2018 IEEE Conference on Technologies for Sustainability (SusTech); 2018; Long Beach, CA, USA. p. 1–8. [Google Scholar]
243. Selvabharathi D, Muruganantham N. Experimental analysis on battery based health monitoring system for electric vehicle. Mater Today: Proc. 2021;45(3):1552–8. doi:10.1016/j.matpr.2020.08.303. [Google Scholar] [CrossRef]
244. Zhang Y, Li T, Yan X, Wang L, Zhang J, Diao X, et al. Electric vehicle charging fault monitoring and warning method based on battery model. World Electr Veh J. 2021;12(1):14. doi:10.3390/wevj12010014. [Google Scholar] [CrossRef]
245. Wang C, Ji T, Mao F, Wang Z, Li Z. Prognostics and health management system for electric vehicles with a hierarchy fusion framework: concepts, architectures, and methods. Adv Civil Eng. 2021;2021(1):1–11. doi:10.1155/2021/6685900. [Google Scholar] [CrossRef]
246. Blazevic R, Veledar O, Stolz M, Macher G. Toward safety-critical artificial intelligence (AI)-based embedded automotive systems. SAE Int J Connected Automated Veh. 2024;8(12–08-01–0007). doi:10.4271/12-08-01-0007. [Google Scholar] [CrossRef]
247. Puertas CAP, Galhardi AC. Integrating ergonomic and artificial intelligence in the automotive. In: SAE technical paper; 2024. [Google Scholar]
248. Castaño F, Strzelczak S, Villalonga A, Haber RE, Kossakowska J. Sensor reliability in cyber-physical systems using internet-of-things data: a review and case study. Remote Sens. 2019;11(19):2252. doi:10.3390/rs11192252. [Google Scholar] [CrossRef]
249. Yeong DJ, Velasco-Hernandez G, Barry J, Walsh J. Sensor and sensor fusion technology in autonomous vehicles: a review. Sensors. 2021;21(6):2140. doi:10.3390/s21062140. [Google Scholar] [PubMed] [CrossRef]
250. Velusamy SP, Ghannam MY, Kadry HM. Automotive sensor infrastructure-challenges and opportunities. In: 2022 IEEE International Symposium on Circuits and Systems (ISCAS); 2022; Austin, TX, USA: IEEE. p. 1018–22. [Google Scholar]
251. Tubaro P, Casilli AA. Micro-work, artificial intelligence and the automotive industry. J Ind Bus Econ. 2019;46(3):333–45. doi:10.1007/s40812-019-00121-1. [Google Scholar] [CrossRef]
252. Wasner C, Traxler J. AI and automotive safety. ATZelectron Worldwide. 2019;14(11):50–3. doi:10.1007/s38314-019-0128-z. [Google Scholar] [CrossRef]
253. Jain M, Kulkarni P. Application of AI, IOT and ML for business transformation of the automotive sector. In: 2022 International Conference on Decision Aid Sciences and Applications (DASA); 2022; Chiangrai, Thailand: IEEE. p. 1270–5. [Google Scholar]
254. Zhang R, Zhao W, Wang C. Research on coordinated control of braking mode switching for enhancing switching quality considering communication delay and time-varying model parameters. IEEE Trans Intell Veh. 2022;8(3):2494–513. doi:10.1109/TIV.2022.3225403. [Google Scholar] [CrossRef]
255. Grigorescu S, Cocias T, Trasnea B, Margheri A, Lombardi F, Aniello L. Cloud2edge elastic AI framework for prototyping and deployment of AI inference engines in autonomous vehicles. Sensors. 2020;20(19):5450. doi:10.3390/s20195450. [Google Scholar] [PubMed] [CrossRef]
256. Thamizhazhagan P, Sujatha M, Umadevi S, Priyadarshini K, Parvathy VS, Pustokhina IV, et al. AI based traffic flow prediction model for connected and autonomous electric vehicles. Comput Mater Contin. 2022;70(2):3333–47. doi:10.32604/cmc.2022.020197. [Google Scholar] [CrossRef]
257. Siddiqui F, Khan R, Sezer S. Bird’s-eye view on the automotive cybersecurity landscape & challenges in adopting AI/ML. In: 2021 Sixth International Conference on Fog and Mobile Edge Computing (FMEC); 2021; Gandia, Spain: IEEE. p. 1–6. [Google Scholar]
258. Aldhyani THH, Alkahtani H. Attacks to automatous vehicles: a deep learning algorithm for cybersecurity. Sensors. 2022;22(1):360. doi:10.3390/s22010360. [Google Scholar] [PubMed] [CrossRef]
259. Török Á., Szalay Z, Sághi B. New aspects of integrity levels in automotive industry—cybersecurity of automated vehicles. IEEE Trans Intell Transp Syst. 2020;23(1):383–91. doi:10.1109/TITS.2020.3011523. [Google Scholar] [CrossRef]
260. Morris D, Madzudzo G, Garcia-Perez A. Cybersecurity threats in the auto industry: tensions in the knowledge environment. Technol Forecast Soc Change. 2020;157(1):120102. doi:10.1016/j.techfore.2020.120102. [Google Scholar] [CrossRef]
261. Eze CP, Emmanuel J, Onietan CIO, Isewon I, Oyelade J. Systematic review on the recent trends of cybersecurity in automobile industry. In: 2023 International Conference on Science, Engineering and Business for Sustainable Development Goals (SEB-SDG); 2023; Omu-Aran, Nigeria: IEEE. p. 1–7. [Google Scholar]
262. Jadoon AK, Wang L, Li T, Zia MA. Lightweight cryptographic techniques for automotive cybersecurity. Wirel Commun Mob Comput. 2018;2018(1):1640167. doi:10.1155/2018/1640167. [Google Scholar] [CrossRef]
263. Tiberti W, Civino R, Gavioli N, Pugliese M, Santucci F. A hybrid-cryptography engine for securing intra-vehicle communications. Appl Sci. 2023;13(24):13024. doi:10.3390/app132413024. [Google Scholar] [CrossRef]
264. Kumar A, Gholve A, Kotalwar K. Automotive security solution using hardware security module (HSM). In: SAE technical paper; 2024. [Google Scholar]
265. Baldini G, Giuliani R, Gemo M, Dimc F. On the application of sensor authentication with intrinsic physical features to vehicle security. Comput Electr Eng. 2021;91(2):107053. doi:10.1016/j.compeleceng.2021.107053. [Google Scholar] [CrossRef]
266. Luo F, Zhang X, Yang Z, Jiang Y, Wang J, Wu M, et al. Cybersecurity testing for automotive domain: a survey. Sensors. 2022;22(23):9211. doi:10.3390/s22239211. [Google Scholar] [PubMed] [CrossRef]
267. Lütge C, Poszler F, Acosta AJ, Danks D, Gottehrer G, Mihet-Popa L, et al. AI4People: ethical guidelines for the automotive sector-fundamental requirements and practical recommendations. Int J Technoethics. 2021;12(1):101–25. doi:10.4018/IJT. [Google Scholar] [CrossRef]
268. Wang H, Khajepour A, Cao D, Liu T. Ethical decision making in autonomous vehicles: challenges and research progress. IEEE Intell Transp Syst Mag. 2020;14(1):6–17. doi:10.1109/MITS.2019.2953556. [Google Scholar] [CrossRef]
269. Sharma A, Gupta A, Bhargava A, Rawat A, Yadav P, Gupta D. From Sci-Fi to reality: the evolution of human—computer interaction with artificial intelligence. In: 2023 2nd International Conference on Applied Artificial Intelligence and Computing (ICAAIC); 2023; Salem, India: IEEE. p. 127–34. [Google Scholar]
270. Hussain R, Zeadally S. Autonomous cars: research results, issues, and future challenges. IEEE Commun Surv Tutorials. 2018;21(2):1275–313. doi:10.1109/COMST.2018.2869360. [Google Scholar] [CrossRef]
271. Muhammad K, Ullah A, Lloret J, Del Ser J, de Albuquerque VHC. Deep learning for safe autonomous driving: current challenges and future directions. IEEE Trans Intell Transp Syst. 2020;22(7):4316–36. doi:10.1109/TITS.2020.3032227. [Google Scholar] [CrossRef]
272. Grigorescu S, Trasnea B, Cocias T, Macesanu G. A survey of deep learning techniques for autonomous driving. J Field Robot. 2020;37(3):362–86. doi:10.1002/rob.21918. [Google Scholar] [CrossRef]
273. Ma Y, Wang Z, Yang H, Yang L. Artificial intelligence applications in the development of autonomous vehicles: a survey. IEEE/CAA J Automatica Sinica. 2020;7(2):315–29. doi:10.1109/JAS.2020.1003021. [Google Scholar] [CrossRef]
274. Bathla G, Bhadane K, Singh RK, Kumar R, Aluvalu R, Krishnamurthi R, et al. Autonomous vehicles and intelligent automation: applications, challenges, and opportunities. Mob Inf Syst. 2022;2022(1):7632892. doi:10.1155/2022/7632892. [Google Scholar] [CrossRef]
275. Gao X, Bian X. Autonomous driving of vehicles based on artificial intelligence. J Intell Fuzzy Syst. 2021;41(4):4955–64. doi:10.3233/JIFS-189982. [Google Scholar] [CrossRef]
276. Sharma M, Sharma M, Sharma M, Yadav KS, Shukla S. Industry 4.0 technologies for smart manufacturing: a systematic review of machine learning methods for predictive maintenance. In: 2023 International Conference on Self Sustainable Artificial Intelligence Systems (ICSSAS); 2023; Erode, India. p. 397–403. [Google Scholar]
277. Jerry A, Madrid. The role of artificial intelligence in automotive manufacturing and design. Int J Adv Resn Sci, Commun Technol. 2023;3(1):798–802. [Google Scholar]
278. Lee J, Chua PC, Chen L, Ng PHN, Kim Y, Wu Q, et al. Key enabling technologies for smart factory in automotive industry: status and applications. Int J Precision Eng Manuf—Smart Technol. 2023;1(1):93–105. doi:10.57062/ijpem-st.2022.0017. [Google Scholar] [CrossRef]
279. Ajoudani A, Zanchettin AM, Ivaldi S, Albu-Schäffer A, Kosuge K, Khatib O. Progress and prospects of the human—robot collaboration. Auton Robots. 2018;42(5):957–75. doi:10.1007/s10514-017-9677-2. [Google Scholar] [CrossRef]
280. Othman U, Yang E. Human-robot collaborations in smart manufacturing environments: review and outlook. Sensors. 2023;23(12):5663. doi:10.3390/s23125663. [Google Scholar] [PubMed] [CrossRef]
281. Bogue R. The changing face of the automotive robotics industry. In Robot: Int J Robot Res Appl. 2022;49(3):386–90. doi:10.1108/IR-01-2022-0022. [Google Scholar] [CrossRef]
282. Michalos G, Kousi N, Karagiannis P, Gkournelos C, Dimoulas K, Koukas S, et al. Seamless human robot collaborative assembly—an automotive case study. Mechatronics. 2018;55:194–211. doi:10.1016/j.mechatronics.2018.08.006. [Google Scholar] [CrossRef]
283. de Costa GM, Petry MR, Moreira AP. Augmented reality for human-robot collaboration and cooperation in industrial applications: a systematic literature review. Sensors. 2022;22(7):2725. doi:10.3390/s22072725. [Google Scholar] [PubMed] [CrossRef]
284. Razdan R, Akbaş Mİ., Sell R, Bellone M, Menase M, Malayjerdi M. Polyverif: an open-source environment for autonomous vehicle validation and verification research acceleration. IEEE Access. 2023;11(3):28343–54. doi:10.1109/ACCESS.2023.3258681. [Google Scholar] [CrossRef]
285. Ma Y, Sun C, Chen J, Cao D, Xiong L. Verification and validation methods for decision-making and planning of automated vehicles: a review. IEEE Trans Intell Veh. 2022;7(3):480–98. doi:10.1109/TIV.2022.3196396. [Google Scholar] [CrossRef]
286. Ebadinezhad S, Stanley KA, Engo GM, Osemeha NK, Mayar AS. The impact of AI on traffic management and safety in the internet of vehicles through mobile edge computing. In: 2024 International Conference on Inventive Computation Technologies (ICICT); 2024; Lalitpur, Nepal: IEEE. p. 319–26. [Google Scholar]
287. Saleh SN, Fathy C. A novel deep-learning model for remote driver monitoring in SDN-based internet of autonomous vehicles using 5G technologies. Appl Sci. 2023;13(2):875. doi:10.3390/app13020875. [Google Scholar] [CrossRef]
288. You X, Zhang C, Tan X, Jin S, Wu H. AI for 5G: research directions and paradigms. Sci China Inf Sci. 2019;62(2):1–13. doi:10.1007/s11432-018-9596-5. [Google Scholar] [CrossRef]
289. Kim H, Ben-Othman J, Mokdad L, Son J, Li C. Research challenges and security threats to AI-driven 5G virtual emotion applications using autonomous vehicles, drones, and smart devices. IEEE Netw. 2020;34(6):288–94. doi:10.1109/MNET.011.2000245. [Google Scholar] [CrossRef]
290. Guo H, Zhou X, Liu J, Zhang Y. Vehicular intelligence in 6G: networking, communications, and computing. Veh Commun. 2022;33:100399. doi:10.1016/j.vehcom.2021.100399. [Google Scholar] [CrossRef]
291. Rudin C. Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat Mach Intell. 2019;1(5):206–15. doi:10.1038/s42256-019-0048-x. [Google Scholar] [PubMed] [CrossRef]
292. Moreira C, Chou YL, Velmurugan M, Ouyang C, Sindhgatta R, Bruza P. LINDA-BN: an interpretable probabilistic approach for demystifying black-box predictive models. Decis Support Syst. 2021;150:113561. doi:10.1016/j.dss.2021.113561. [Google Scholar] [CrossRef]
293. Lakkaraju H, Arsov N, Bastani O. Robust and stable black box explanations. In: 37th International Conference on Machine Learning; 2020; PMLR. p. 5628–38. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools