
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A Latency-Efficient Integration of Channel Attention for ConvNets
1 Department of Information and Communication Engineering, Yeungnam University, Gyeongsan, 38541, Republic of Korea
2 RLRC for Autonomous Vehicle Parts and Materials Innovation, Yeungnam University, Gyeongsan, 38541, Republic of Korea
3 School of Computing, Robert Gordon University, Aberdeen, AB10 7QB, UK
* Corresponding Author: Ho-youl Jung. Email:
Computers, Materials & Continua 2025, 82(3), 3965-3981. https://doi.org/10.32604/cmc.2025.059966
Received 21 October 2024; Accepted 15 January 2025; Issue published 06 March 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Designing fast and accurate neural networks is becoming essential in various vision tasks. Recently, the use of attention mechanisms has increased, aimed at enhancing the vision task performance by selectively focusing on relevant parts of the input. In this paper, we concentrate on squeeze-and-excitation (SE)-based channel attention, considering the trade-off between latency and accuracy. We propose a variation of the SE module, called squeeze-and-excitation with layer normalization (SELN), in which layer normalization (LN) replaces the sigmoid activation function. This approach reduces the vanishing gradient problem while enhancing feature diversity and discriminability of channel attention. In addition, we propose a latency-efficient model named SELNeXt, where the LN typically used in the ConvNext block is replaced by SELN to minimize additional latency-impacting operations. Through classification simulations on ImageNet-1k, we show that the top-1 accuracy of the proposed SELNeXt outperforms other ConvNeXt-based models in terms of latency efficiency. SELNeXt also achieves better object detection and instance segmentation performance on COCO than Swin Transformer and ConvNeXt for small-sized models. Our results indicate that LN could be a considerable candidate for replacing the activation function in attention mechanisms. In addition, SELNeXt achieves a better accuracy-latency trade-off, making it favorable for real-time applications and edge computing. The code is available at (accessed on 06 December 2024).Keywords
Over the past decade, significant advancements in image classification [1], object detection [2], and semantic segmentation [3] have been achieved by vision neural networks, particularly convolutional neural networks (ConvNets). Vision networks require low latency and high precision, which are often necessary for real-time applications like advanced driver assistance systems, robotics, surveillance, and security. There are several key innovations to enhance the vision network.
For example, batch normalization (BN) [4] has been incorporated into these networks to stabilizes and accelerates training by normalizing neuron inputs using the mean and variance computed from a mini-batch. This process reduces internal covariate shifts and improves gradient flow, leading to more efficient and robust training.
Recently, the usage of attention mechanisms has increased and shown enhanced performance in various vision tasks. There are several types of attention approaches, including channel and spatial attention. Such as the convolutional block attention module (CBAM) [5] utilizes channel and spatial attention simultaneously. Attention mechanisms allow models to selectively focus on relevant parts of the input, improving the model’s performance.
Transformer [6] is a specific type of architecture originally designed for natural language processing. Vision transformer [7] successfully enables the use of the transformer architecture for vision tasks by utilizing a massive amount of images. Unlike traditional ConvNets, which use convolutions for feature extraction, vision transformers utilize multi-head self-attention (MHSA) mechanisms [6]. They break down the image into smaller patches, treating each patch as a sequence of tokens. MHSA is then applied to capture dependencies between these tokens. Vision transformers have shown promising results in various vision tasks, often achieving competitive performance compared to ConvNet-based models.
Modern ConvNets incorporate the benefits of vision transformers into the ConvNet architecture. Large-size kernel convolution is integrated into ConvNets to cover wide region information, similar to MHSA in transformers. Additionally, layer normalization (LN) [8] has become widely adopted in modern ConvNets.
For instance, in ConvNeXt [9], a large
Many approaches have been developed to reduce the computational complexity, but they do not necessarily guarantee low latency. For example, depth-wise separable convolution [13] and group convolution [14] significantly reduce computational complexity, but the actual speedup is limited due to the substantial time required for memory access. HorNet [15] captures high-order spatial relationships with recursive gated convolutions, enhancing vision task performance with lower or similar complexity than ConvNeXt but resulting in longer latency.
ConvNeXt [9] does not consider the attention mechanism, while ConvNeXt V2 [16] proposes global response normalization (GRN), which reduces feature collapse. The authors measure the feature collapse by average feature cosine distance. As the average feature cosine distance approaches 0.5, the features become more diverse across the channels. GRN enhances classification performance on ImageNet-1k [17] compared to ConvNeXt without increasing computational complexity and the number of parameters. However, GRN necessitates an additional residual connection and LN in a block. Consequently, GRN increases latency, even though it does not increase the computational complexity compared to ConvNeXt. It impacts negatively the latency-accuracy trade-off. Squeeze-and-excitation(SE), CBAM and GRN are compared in terms of classification accuracy in [16], where it is reported that SE and CBAM also increase the contrast of individual channels similar to GRN. CBAM can be a considerable candidate for the attention module, but the gains in accuracy are relatively modest in latency.
Clearly, it is necessary to consider a latency-efficient attention mechanism because most vision networks are required to perform within a limited time. In this paper, we concentrate on SE-based channel attention, considering the trade-off between latency and accuracy. A latency-efficient network is developed with the following two approaches.
First, a way to enhance channel attention performance is explored. We propose a variation of the SE module, called squeeze-and-excitation with layer normalization (SELN), in which LN replaces the sigmoid activation function. The sigmoid function in the existing SE maps the scale values of each channel to a range of 0 to 1, causing the scale values to become saturated at the extremes. This results in a reduction in the discriminability of channel importance. If LN replaces the sigmoid, the scale value of each channel is normalized using the mean and standard deviation calculated across all channels and then adjusted using learnable rescale and bias parameters, which could enhance the discriminability of channel importance.
Second, redundant operations are explored to reduce latency when SELN is applied. We propose a latency-efficient ConvNeXt-based model named SELNeXt, where SELN replaces the conventional LN used in the ConvNeXt block. LN is time-consuming due to its computation of normalization across all features. By replacing LN with SELN, the computational resources originally used for LN are allocated to perform channel attention and scale normalization. Integrating channel attention into ConvNeXt is helpful for improving performance.
Our empirical demonstrations show that SELNeXt is more efficient regarding the accuracy-latency trade-off. We analyze the inter-channel feature independence according to the usage of SE by measuring the average feature cosine distance at each inverted residual block in pre-trained MobileNetV3 [18]. It is observed that the SE-integrated block generates feature maps that are more independent across each channel compared to the non-SE-integrated block.
The main contributions of this paper are as follows:
1. Analyze the inter-channel feature independence according to the usage of SE.
2. Introduce SELN, which further enhances vision task performance and feature independence compared to traditional SE.
3. Propose the SELNeXt model architecture, which is latency-efficient in various vision tasks compared to ConvNeXt.
SE [19] significantly enhances the representational ability of neural networks. It adaptively adjusts the scale of each channel, determining what to pay attention to [20]. For a given input activation map X with dimensions
as shwon in Fig. 1. Here,
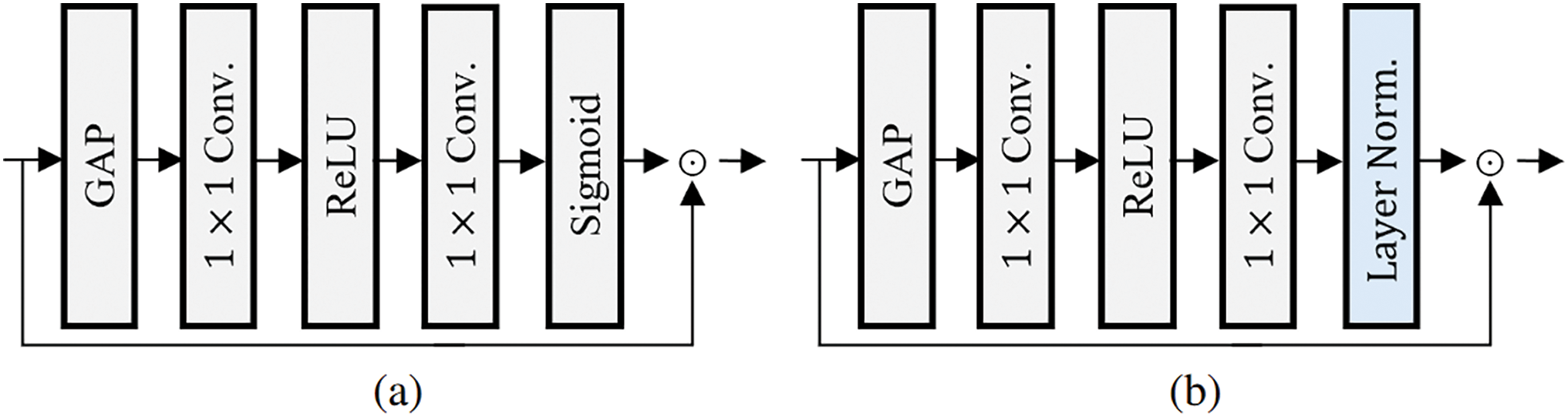
Figure 1: (a) Squeeze-and-excitation (SE) and (b) the proposed squeeze-and-excitation with layer normalization (SELN) module, where layer normalization (LN) replaces the sigmoid function
2.2 Various Attention Mechanisms
Channel Attention. Various other channel attention mechanisms have been developed. Unlike SE [19], a discrete cosine transform is utilized for spatial aggregation in FCA [21]. ECA [22] utilizes a 1D convolution instead of two fully connected layers for a lightweight attention module. They extract channel-wise statistics with a fully connected or convolution layer. Most channel attention mechanisms, including SE, FCA, and ECA, utilize the sigmoid activation function. GCT [23] and GRN [16] collect spatial global information using the
where
GRN is formulated as [16]
where
Other Attention. MHSA [6] has been often used. ViT [7] demonstrates performance comparable to ConvNets in computer vision tasks using MHSA. Swin [25] employs a hierarchical approach, limiting MHSA to non-overlapping local windows and shifting them across layers to capture local and global features. However, as stated in [9] and [15], MHSA-based networks such as ViT and Swin are less latency-efficient in vision tasks compared to ConvNeXt.
Recently, hybrid networks that combine convolution and MHSA have been actively researched, particularly for small networks designed for mobile devices. MobileViT [26] aims to integrate the advantages of both ViT and ConvNet through the use of global attention blocks. EdgeNeXt [27] proposes a split depth-wise transpose attention encoder that implicitly increases the receptive field and encodes multi-scale features. MobileFormer [28] parallelizes a two-way bridge between MobileNet and Transformer. FastViT [29] applies attention only in the last stage of the network. To perform MHSA efficiently, EfficientFormer V2 [30] downsamples the query, key, and value before performing dot product, while NextViT [31] downsamples only the key and value, using a module called spatial reduction attention. In addition, more efficient MHSA is explored utilizing multi-query attention, where only a single header is generated for the key and value [32]. Hybrid networks such as MobileViT-XXS and EdgeNeXt-XXS show lower accuracy compared to the convolution-based FasterNet-T0 with longer latency on a GPU [33].
2.3 Analysis of Feature Collapse
In ConvNeXt V2 [16], they observe a “feature collapse” phenomenon in which numerous feature maps become dead or saturated. It leads to activation maps being redundant across channels. Feature collapse is analyzed by calculating the average cosine distance across the feature maps. It is shown that the attention mechanism alleviates feature collapse, emphasizing important features and diminishing less useful ones.
For a given activation map
where
To analyze the feature collapse according to the usage of SE and SELN, we evaluate the average feature cosine distance in three cases such as with SE, without SE, and with the proposed SELN, using MobileNetV3 as a backbone. The average feature cosine distance is measured at each inverted residual block in MobileNetV3 [18], testing on 50,000 validation images of the ImageNet-1k dataset [17]. Fig. 2 shows the average feature cosine distance along the number of network blocks. In the blocks 2 to 4 and 9 to 13, indicated by a red dashed box, SE or SELN is applied. SE and SELN integrated blocks tend to have average distances closer to 0.5. In particular, it shows the average distance closest to 0.5 in the SELN integrated block. In the case of SE, the sigmoid-activated scale vector
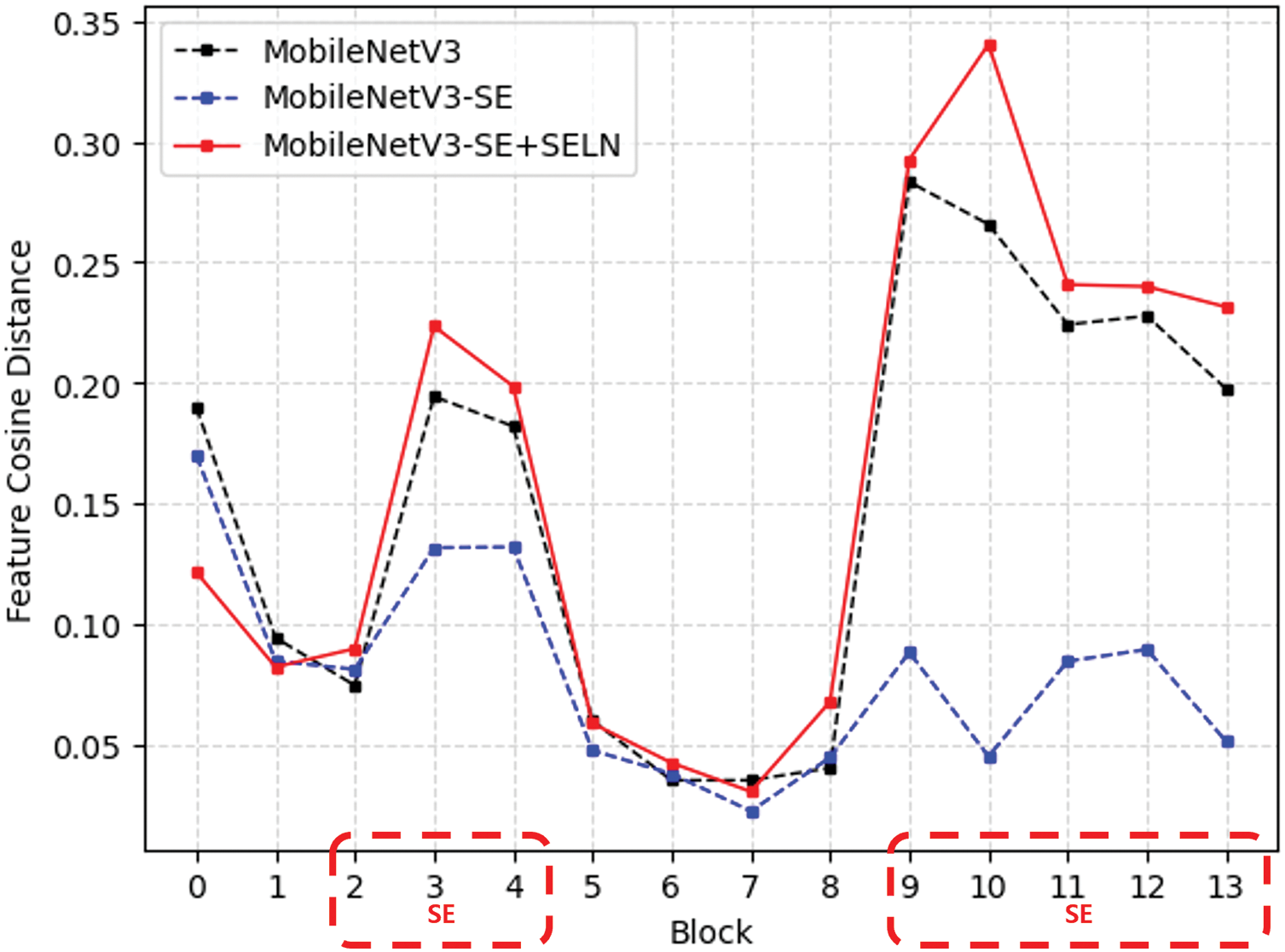
Figure 2: Average feature cosine distance after the expansion layer along the number of network blocks, where three cases such as with SE (denoted as MobileNetV3), without SE (MobileNetV3-SE), and with the proposed SELN (MobileNetV3-SE+SELN), are compared
3.1 Squeeze-and-Excitation with Layer Normalization
Most channel attention mechanisms apply the sigmoid or hard-sigmoid activation function to the scale vector, as mentioned in Section 2. The sigmoid function in existing SE models plays a role in normalizing scale values to a specific range, as mentioned in [20,34]. Considering that both the sigmoid and LN functions are used for normalization, we are exploring the replacement of the sigmoid function with LN.
The sigmoid function can lead to the vanishing gradient problem, as discussed in [35]. The sigmoid function maps the scale vector coming from the fully connected layers to a fixed value between 0 and 1, regardless of the values of other channels. The sigmoid function approaches 1 asymptotically when the scale value becomes greater than a certain threshold and approaches 0 asymptotically when the scale value is smaller than a certain threshold. This saturation causes a reduction in the discriminability of the scale vector, as described in Fig. 3a, where the sigmoid function causes the scale values to flatten at 0 or 1.
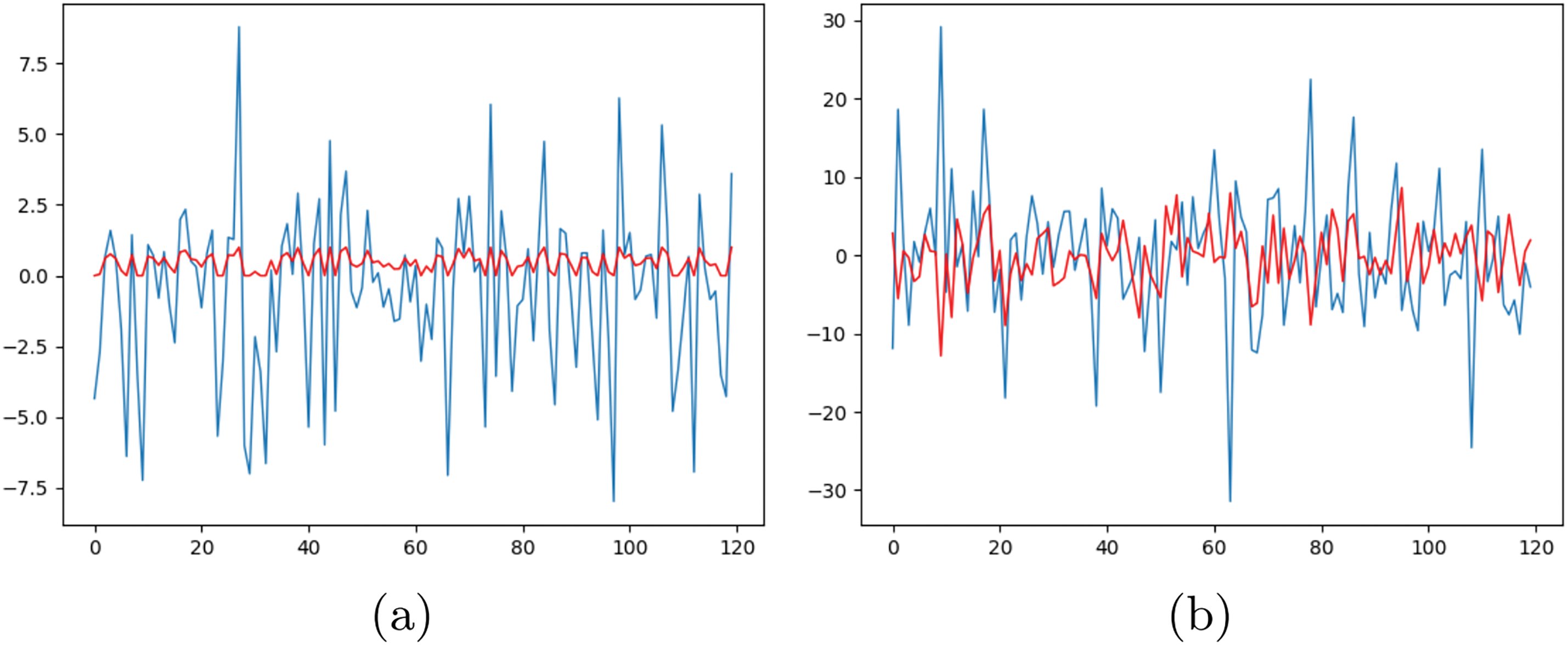
Figure 3: Examples of channel scales before (blue) and after (red) applying (a) the sigmoid function and (b) layer normalization (LN)
If the sigmoid in SE is replaced by LN, which involves channel normalization and adjustment steps, the discriminability of the scale vector is enhanced. This change alleviates the vanishing gradient problem by controlling gradient flow. In the normalization step, the scale value of each channel is adjusted relative to the distribution of other channels. The adjustment step learns the inherent importance of the channel through trainable parameters, enabling a better reflection of the channel’s significance. It is observed that LN enriches the values of the scale vector compared to the sigmoid function, as shown in Fig. 3b. This is the reason why the proposed SELN integrates LN instead of the activation function for the scale vector, as shown in Fig. 1b. SELN is formulated as
where the scale vector
where
As the layer normalization vector
Using SELN, we propose a new family of neural networks, SELNeXt, that is more efficient in terms of the accuracy latency trade-off compared to ConvNeXt [9]. The basic architecture for SELNeXt consists of four hierarchical stages, like in ConvNeXt. The stem block consists of
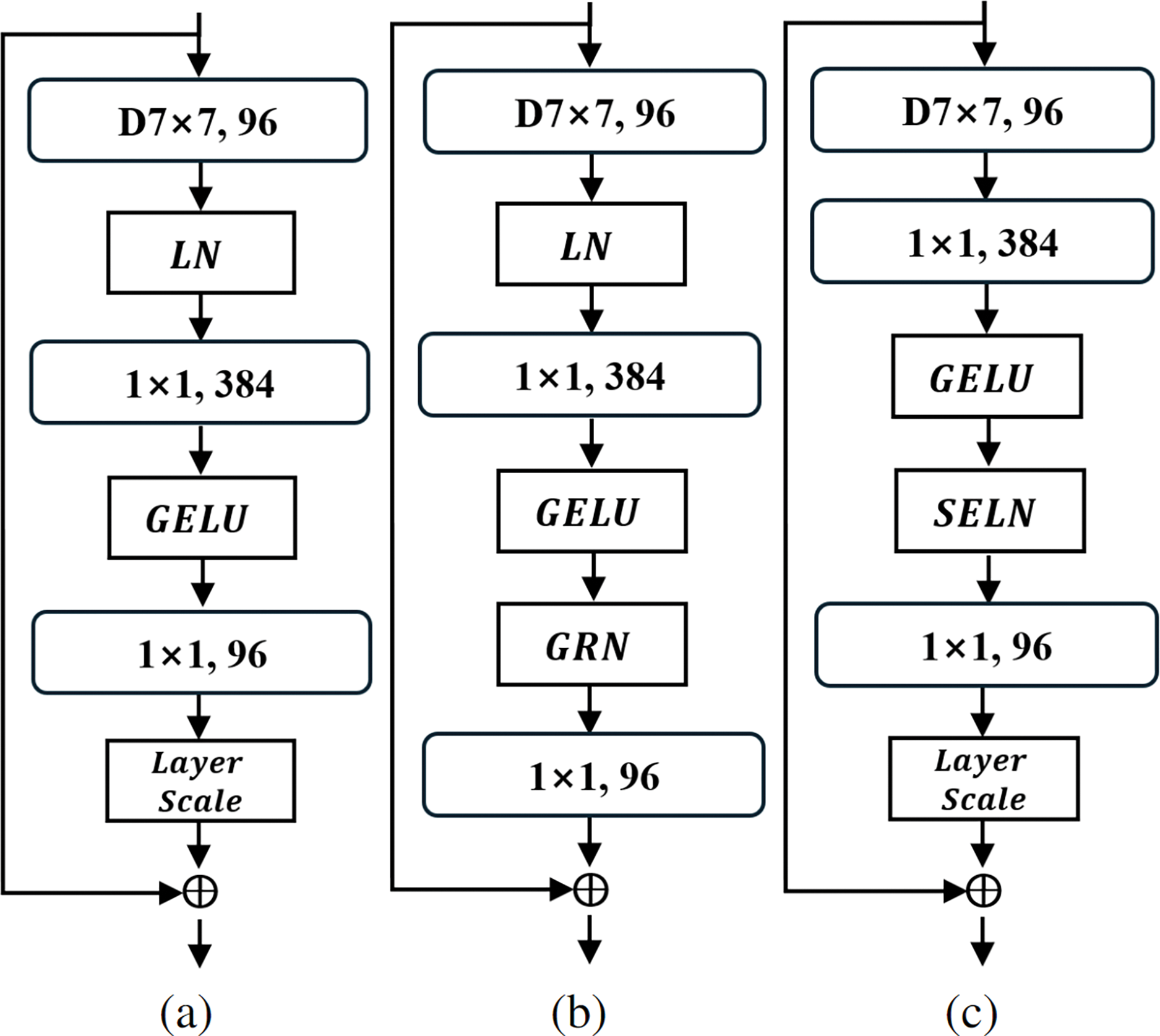
Figure 4: Block designs for (a) ConvNeXt, (b) ConvNeXt V2, and (c) the proposed SELNeXt
• SELNeXt-T: C= (96, 192, 384, 768), B= (3, 3, 9, 3).
• SELNeXt-S: C= (96, 192, 384, 768), B= (3, 3, 27, 3).
• SELNeXt-B: C= (128, 256, 512, 1024), B= (3, 3, 27, 3).
C represents the number of input and output channels, while B indicates the number of blocks within each stage.
4.1 Image Classification on ImageNet-1k Dataset
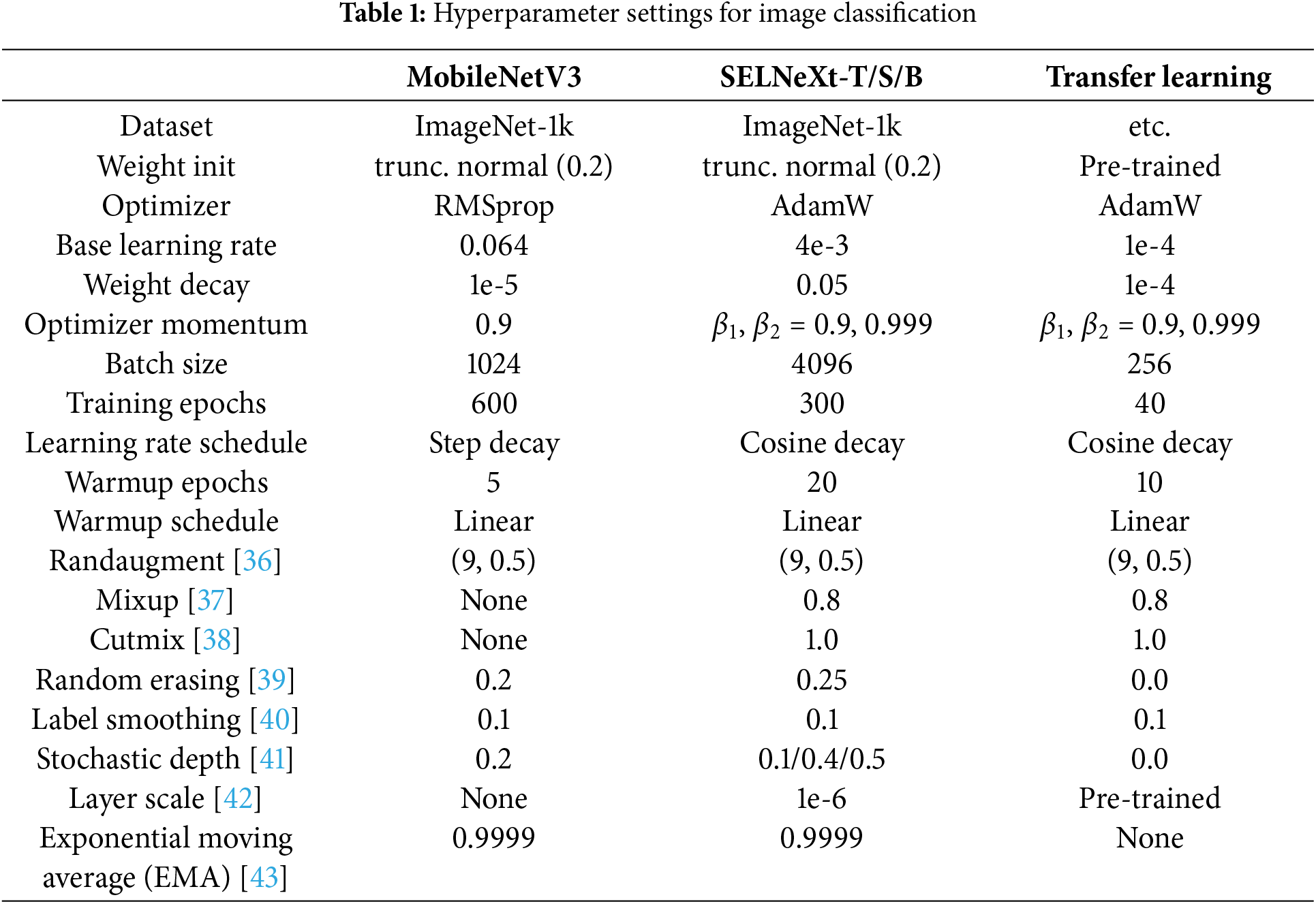
Setup. ImageNet-1k [17] containing around 1.3 million images in the training set and 50 thousand in the validation set is used for image classification performance evaluation of SELNeXt. The performance is compared with Swin [25], ConvNeXt [9], HorNet [9], and ConvNeXt V2 [16], which have similar architecture and computational complexity.We use the same training hyperparameters as those in ConvNeXt [9], which are listed in Table 1.
Results. Table 2 shows the validation results of SELNeXt, including transformer-based and other ConvNeXt-based networks. It reports the top-1 accuracy on the validation set of ImageNet-1k, as well as the number of parameters, computational complexity (FLOPs), and latency. Latency is measured except for model loading time and data preprocessing, which are conducted in the same manner as in [33]. The experiment is performed iteratively five times for consistent and reliable measurement. The average latency with its standard deviation is included in the table. Inference latency is measured on a single RTX 2080 Ti with batch size 96 and full precision (FP32).
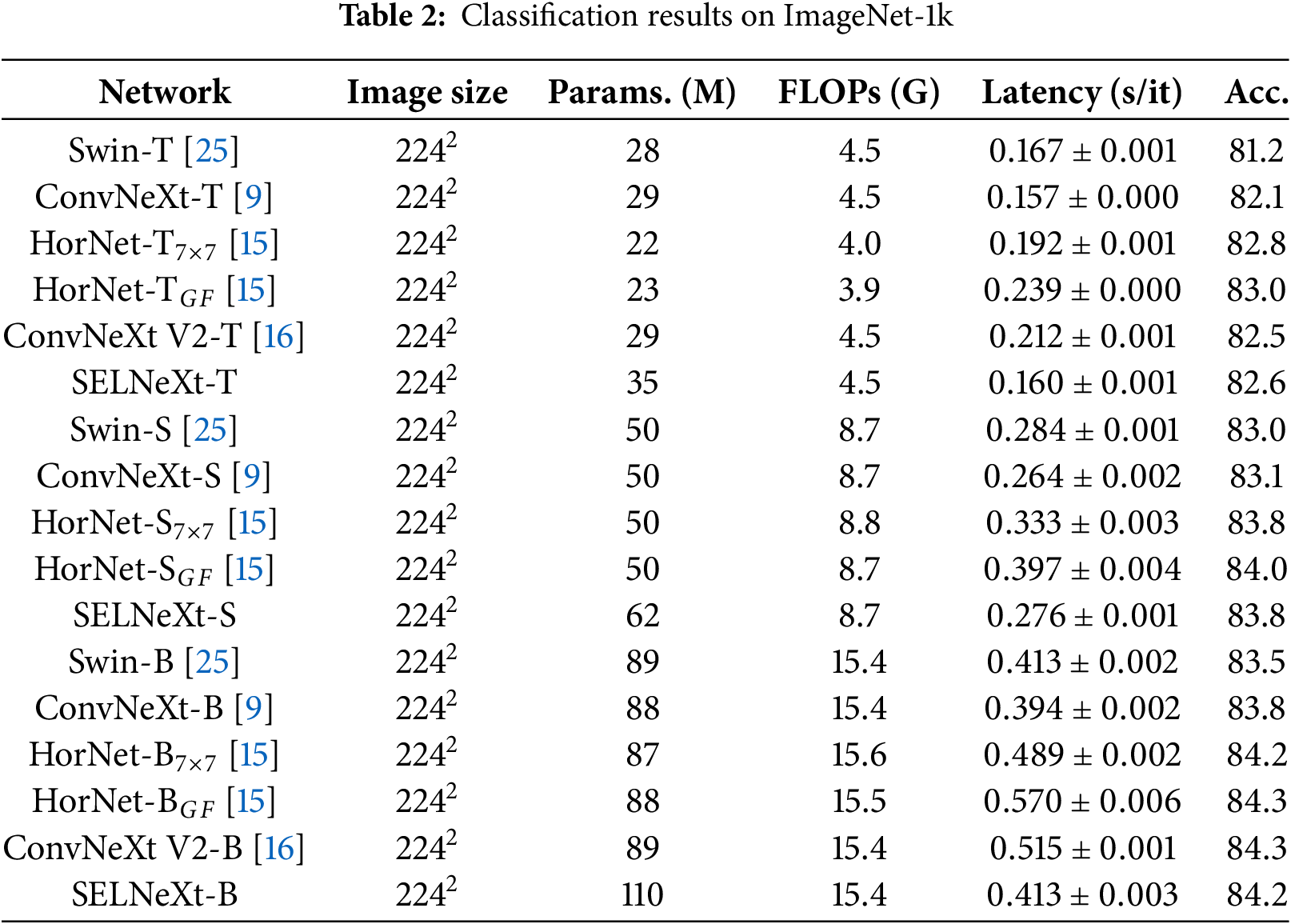
Fig. 5 illustrates the accuracy comparison with other models in terms of the number of parameters, FLOPs, and latency. Our SELNeXt requires approximately 23% more parameters than ConvNeXt. The parameter increase comes from adding two non-shared weights of size
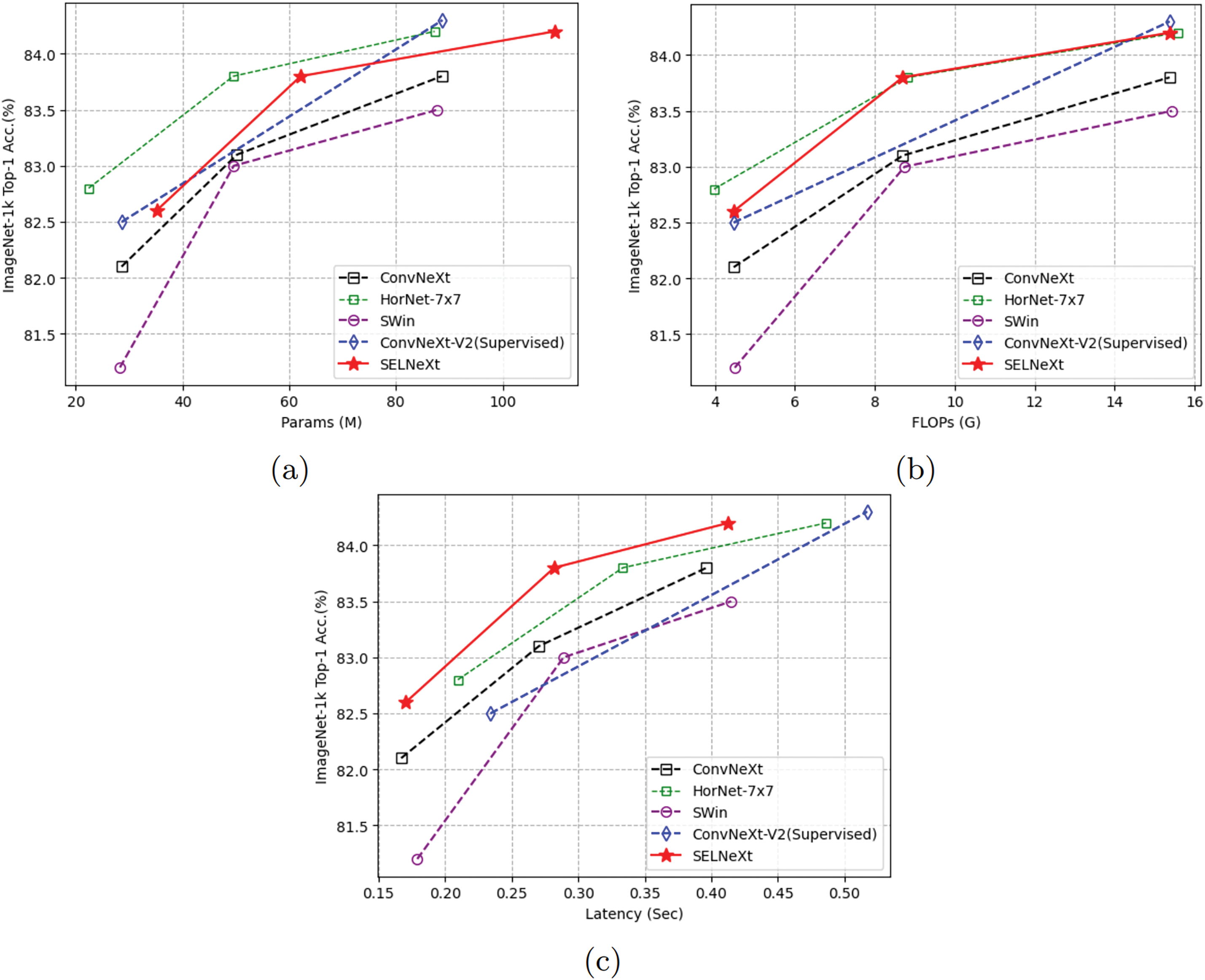
Figure 5: Top-1 accuracy of ImageNet-1k classification in terms of (a) the number of parameters, (b) FLOPs, and (c) latency
Our small and base models demonstrate comparable accuracy to HorNet and ConvNeXt V2 regarding computational complexity. The fully connected layers in SELN are applied after GAP, which reduces the dimension from
Our models outperform the others in terms of latency. SELNeXt is designed to minimize additional latency-impacting operations and exclude conventional LN. In contrast, both HorNet and ConvNeXt require longer latency because HorNet contains more depth-wise convolution and high-order element-wise multiplication, and ConvNeXt V2 requires conventional LN and additional element-wise additions.
Fig. 6 shows the attention maps of ConvNeXt-B and SELNeXt-B, generated using Ablation CAM [48]. SELNeXt-B produces heat maps that are more focused on the ground truth objects, such as the stopwatch and basketball.
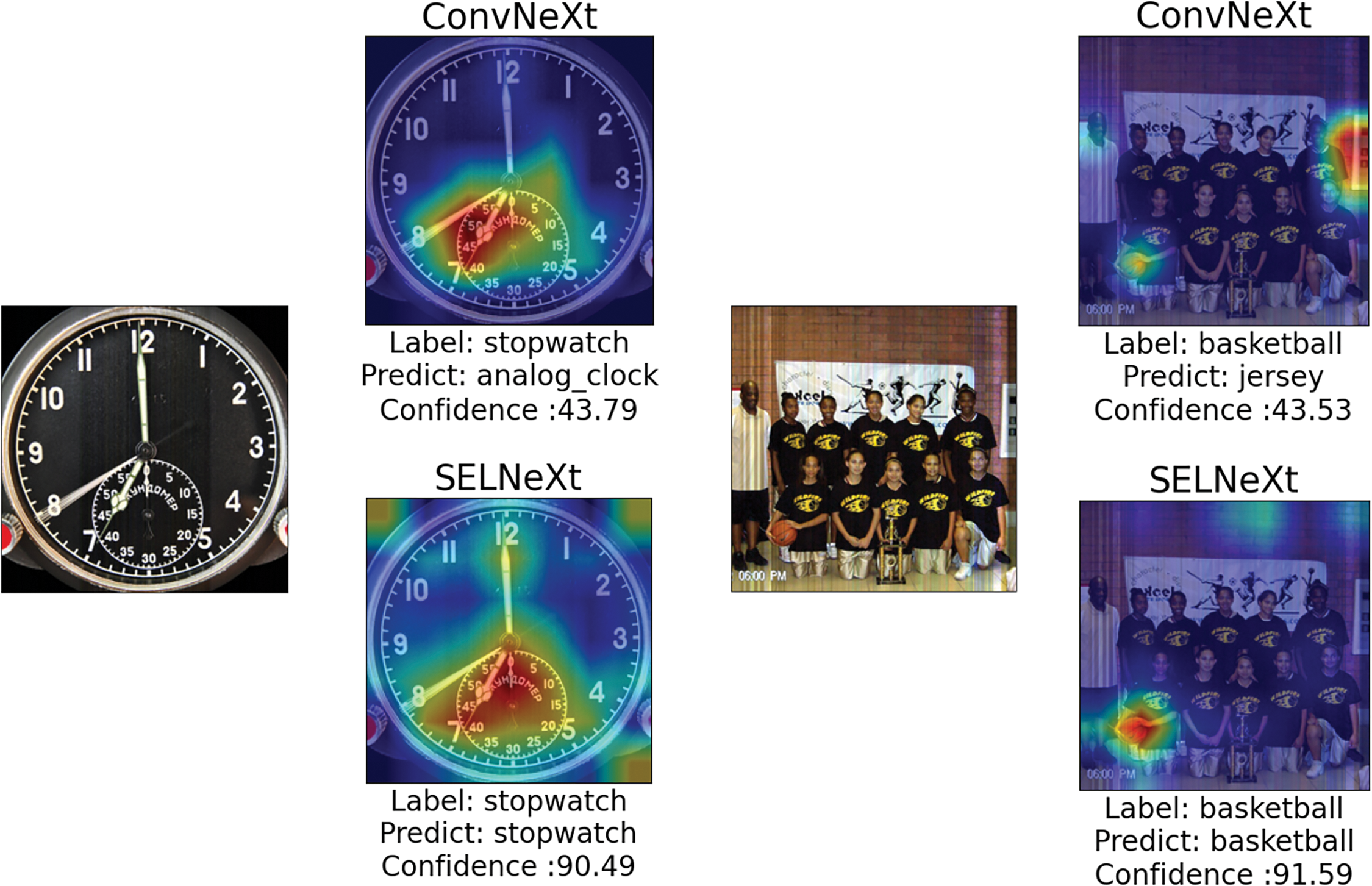
Figure 6: Attention maps for the input image (left), showing ConvNeXt-B (top right) and SELNeXt-B (bottom right)
Transfer learning is conducted for both image classification and object detection/segmentation.
CIFAR-100 [44], Oxford 102 Flowers [45], Stanford Cars [46], and FGVC-Aircraft [47] datasets are tested to validate generalized performance. These datasets comprise 60,000 images across 100 classes, 8189 images across 102 classes, 16,185 images across 196 classes, and 10,000 images across 100 classes, respectively. Table 1 outlines the detailed settings for the training hyperparameters. Table 3 shows that SELNeXt is more accurate than ConvNeXt across all datasets when comparing models of similar sizes.

4.2.2 Object Detection and Segmentation
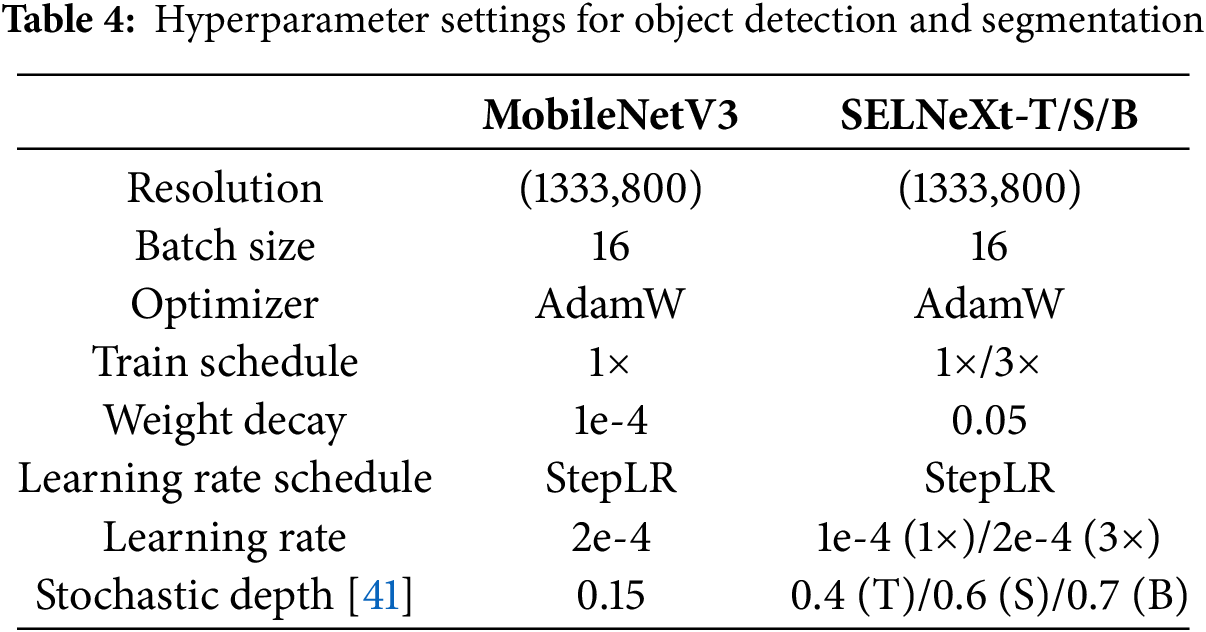
Setup. COCO [49] dataset, which contains 118 and 5 k images for training and validation, is used to evaluate the object detection and instance segmentation performances. We finetune Mask R-CNN [50] and Cascade Mask R-CNN [51] on the COCO dataset with SELNeXt as a backbone, following Swin Transformer [25] and ConvNeXt [9] for a fair comparison. We use multi-scale training, AdamW [52] optimizer, and a
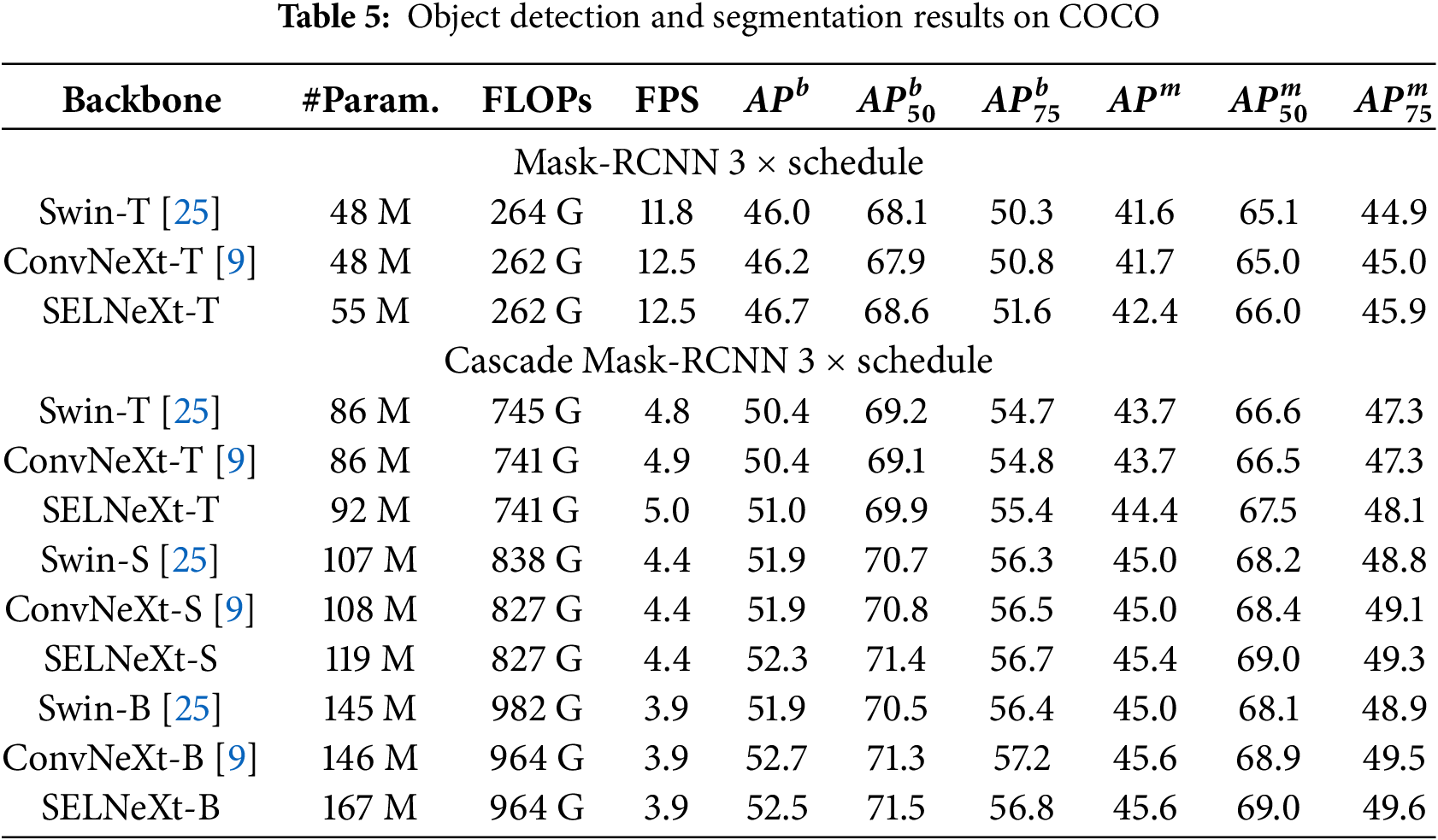
Results. Table 5 shows the object detection and instance segmentation performance of SELNeXt and also lists the performance of Swin Transformer [25] and ConvNeXt [9] for comparison. Across different model complexities, SELNeXt achieves better performance than Swin Transformer and ConvNeXt in many cases. However, SELNeXt shows limited performance for base-sized models in downstream tasks.
In this sub-section, detailed ablation studies for SELN and SELNeXt are provided. Tables 6–8 show ablation studies for SELN. MobileNetV3 is utilized as the baseline with the same hyperparameters for classification in [53]. Table 1 provides detailed training hyperparameter settings. For object detection and segmentation, Mask RCNN is fine-tuned using baseline, and SELN integrated models are used as a backbone with the hyperparameter configurations of Table 4.
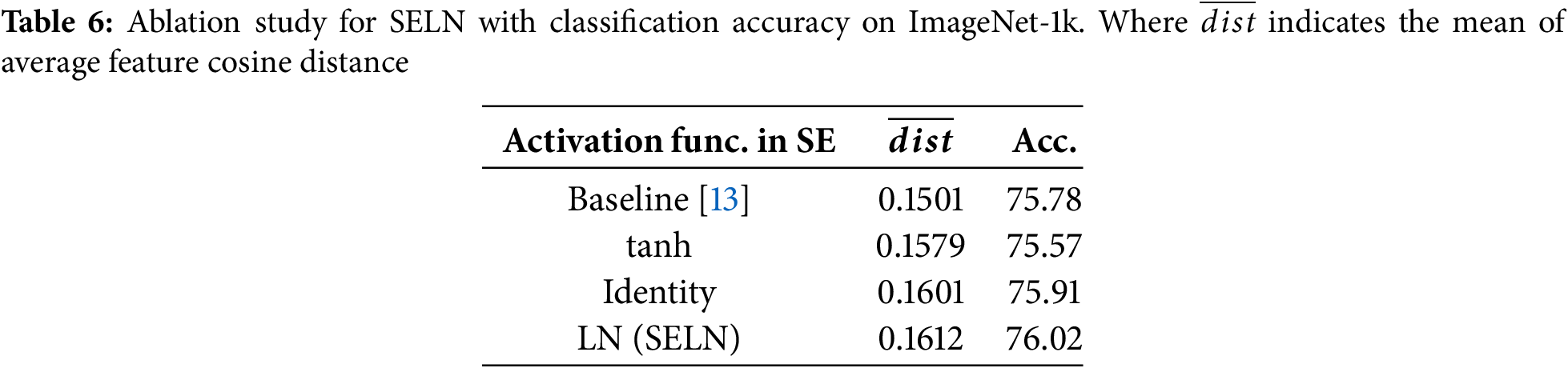
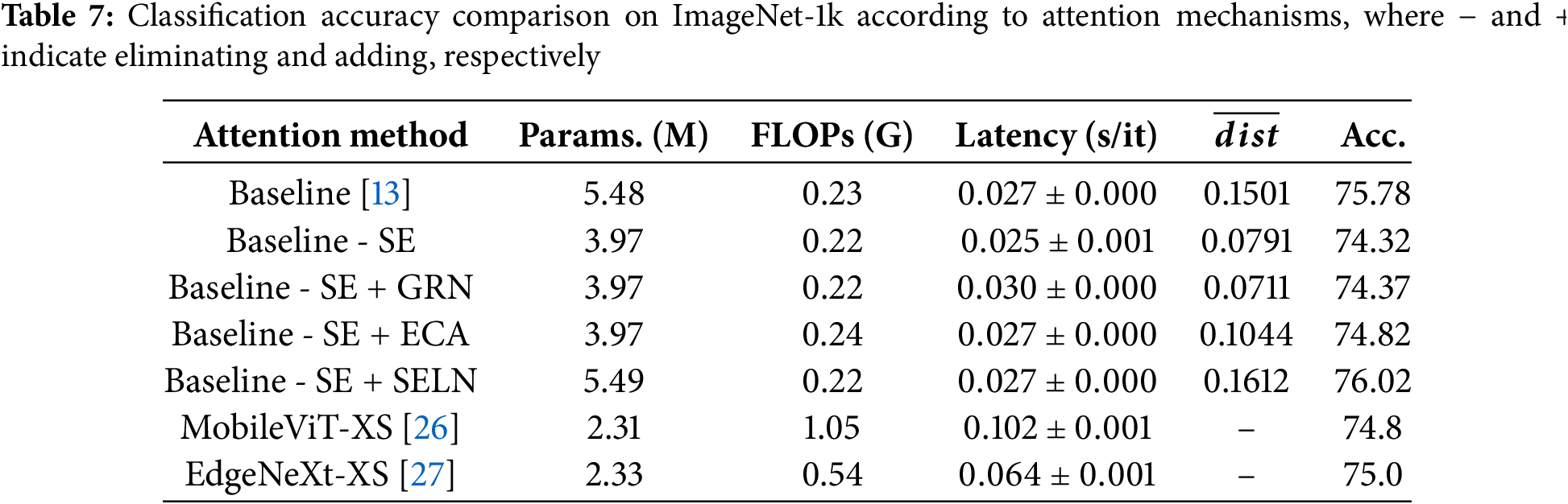

Table 6 shows classification accuracy on ImageNet-1k according to activation or normalization methods just after two fully connected layers of SE. H-sigmoid,
Table 7 shows the classification accuracy across various attention mechanisms with the baseline of MobileNetV3, where SE is replaced with GRN, ECA, and SELN in the baseline. Other hybrid mobile networks, such as MobileViT-XS and EdgeNeXt-XS, are also compared. Baseline-SE+SELN shows the highest accuracy. Baseline-SE+GRN yields nearly identical performance to Baseline-SE because the channel attention effect is bypassed by the shortcut of GRN. Baseline-SE+ECA does not show any improvement compared to the baseline. Hybrid mobile networks, such as MobileViT-XS and EdgeNeXt-XS, are less accurate while requiring longer latency, as explained in [33]. In object detection and segmentation performance on COCO, the SELN case shows improved performance compared to the baseline, as shown in Table 7.
We also present an ablation study on the block design of our SELNeXt network to verify the design of a latency-efficient network as an alternative to LN, as illustrated in Table 9. We conduct ConvNeXt-T as the baseline network. Inference latency is measured on a single RTX 2080 Ti GPU with batch size 96 and full precision. The result of the Baseline+GRN case, equivalent to ConvNeXt V2, is borrowed from [16].
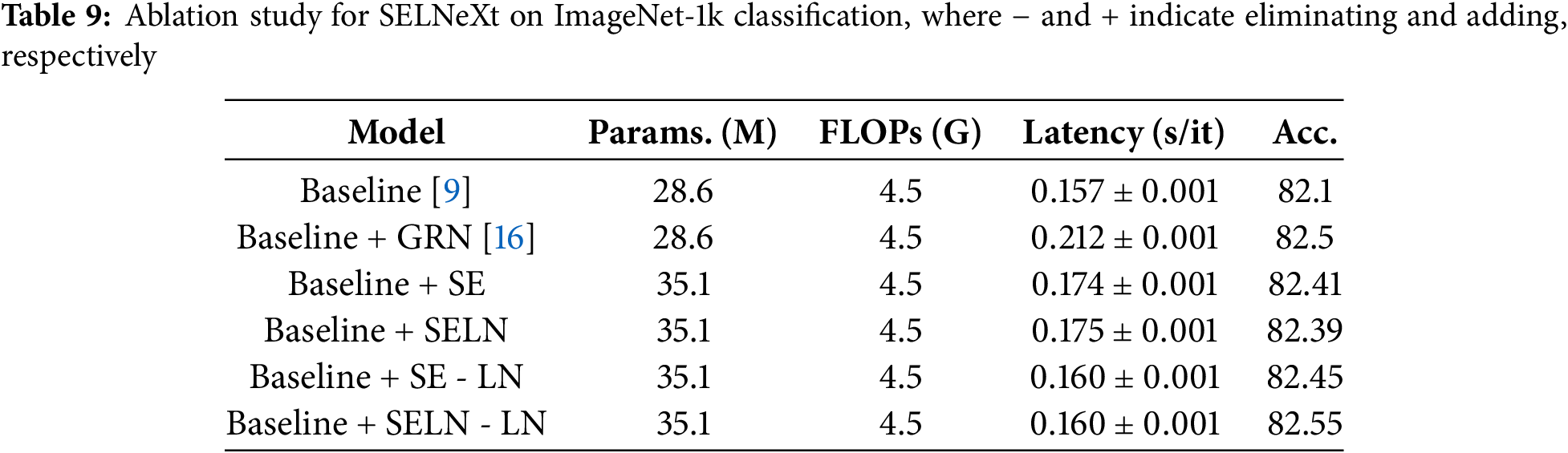
We analyze the cases in which SE or SELN is directly added to the baseline. Both baseline+SE and baseline+SELN showed better accuracy over the baseline model while consuming longer inference time because of the additional operations. The cases for adding SE or SELN to the baseline and eliminating LN are also tested for ablations. Baseline+SELN-LN shows further improvement in accuracy within shorter latency compared to SE or SELN-added cases. Therefore, the block of SELNeXt is designed by adding SELN and removing LN from the baseline.
In this paper, we propose SELN, an enhancement to SE-based channel attention mechanisms, by replacing the sigmoid activation function with LN. Building on SELN, we also introduce SELNeXt, a latency-efficient model that incorporates SELN into the ConvNeXt block and substitutes the conventional LN. SELNeXt achieves a superior accuracy-latency trade-off across benchmarks, including ImageNet-1k for classification and COCO for detection/segmentation tasks. To further validate its generalization capabilities, we test on various datasets with fine-tuning, and the experimental results demonstrate that SELNeXt consistently achieves higher accuracy than ConvNeXt.
SELNeXt is limited in terms of the number of model parameters. SELNeXt requires approximately 23% more parameters than ConvNeXt. In addition, the performance improvement of SELNeXt-B appears to be limited on tasks like object detection and segmentation.
Future research on SELN and SELNeXt could investigate integrating self-supervised learning approaches. The increased feature diversity shown by the SELN-integrated model in supervised learning shows its potential for effectively capturing diverse input characteristics, especially during the reconstruction of masked inputs, as reported in ConvNeXt V2 [16].
Consequently, LN could serve as a viable alternative to the activation function in attention mechanisms. It could help alleviate the vanishing gradient problem and feature collapse while enhancing the discriminability of channel attention. SELNeXt achieves a superior accuracy-latency trade-off, making it particularly valuable for real-time applications and edge computing.
Acknowledgement: None.
Funding Statement: This work was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education under Grant NRF-2021R1A6A1A03039493.
Author Contributions: The authors confirm their contribution to the paper as follows: conceptualization, methodology: Woongkyu Park; investigation: Woongkyu Park, Yeongyu Choi, and Mahammad Shareef Mekala; experiment: Woongkyu Park, and Yeongyu Choi; analysis: Woongkyu Park, Kook-Yeol Yoo, Gyu Sang Choi, and Ho-youl Jung; writing: Woongkyu Park, Mahammad Shareef Mekala, and Ho-youl Jung; supervision: Ho-youl Jung. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data and materials used in this paper are derived from publicly accessible, which are cited throughout the text. References to these sources are provided in the bibliography.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Chen R, Pan L, Li C, Zhou Y, Chen A, Beckman E. An improved deep fusion CNN for image recognition. Comput Mater Contin. 2020;65(2):1691–706. doi:10.32604/cmc.2020.011706. [Google Scholar] [CrossRef]
2. Wu H, Liu Q, Liu X. A review on deep learning approaches to image classification and object segmentation. Comput Mater Contin. 2019;60(2):575–97. doi:10.32604/cmc.2019.03595. [Google Scholar] [CrossRef]
3. Song W, Dong L, Zhao X, Xia J, Liu T, Shi Y. Review of nodule mineral image segmentation algorithms for deep-sea mineral resource assessment. Comput Mater Contin. 2022;73(1):1649–69. doi:10.32604/cmc.2022.027214. [Google Scholar] [CrossRef]
4. Bjorck N, Gomes CP, Selman B, Weinberger KQ. Understanding batch normalization. Adv Neural Inf Process Syst. 2018;31:7705–16. [Google Scholar]
5. Woo S, Park J, Lee JY, Kweon IS. Cbam: convolutional block attention module. In: Proceedings of the European Conference on Computer Vision (ECCV). Cham, Switzerland: Springer; 2018. p. 3–19. [Google Scholar]
6. Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez AN, et al. Attention is all you need. Adv Neural Inf Process Syst. 2017;30:6000–10. [Google Scholar]
7. Dosovitskiy A, Beyer L, Kolesnikov A, Weissenborn D, Zhai X, Unterthiner T, et al. An image is worth 16 × 16 words: transformers for image recognition at scale. In: International Conference on Learning Representations. Appleton, WI, USA: ICLR; 2020. [Google Scholar]
8. Ba JL, Kiros JR, Hinton GE. Layer normalization. arXiv:160706450. 2016. [Google Scholar]
9. Liu Z, Mao H, Wu CY, Feichtenhofer C, Darrell T, Xie S. A convnet for the 2020s. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2022. p. 11976–86. [Google Scholar]
10. Ding X, Zhang X, Han J, Ding G. Scaling up your kernels to 31 × 31: revisiting large kernel design in CNNs. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2022. p. 11963–75. [Google Scholar]
11. Rao Y, Zhao W, Zhu Z, Zhou J, Lu J. GFNet: global filter networks for visual recognition. IEEE Transact Patt Anal Mach Intell. 2023;45(9):10960–73. doi:10.1109/TPAMI.2023.3263824. [Google Scholar] [PubMed] [CrossRef]
12. Yu W, Luo M, Zhou P, Si C, Zhou Y, Wang X, et al. Metaformer is actually what you need for vision. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2022. p. 10819–29. [Google Scholar]
13. Howard AG. Mobilenets: efficient convolutional neural networks for mobile vision applications. arXiv:170404861. 2017. [Google Scholar]
14. Xie S, Girshick R, Dollár P, Tu Z, He K. Aggregated residual transformations for deep neural networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2017. p. 1492–500. [Google Scholar]
15. Rao Y, Zhao W, Tang Y, Zhou J, Lim SN, Lu J. Hornet: efficient high-order spatial interactions with recursive gated convolutions. Adv Neural Inform Process Syst. 2022;35:10353–66. [Google Scholar]
16. Woo S, Debnath S, Hu R, Chen X, Liu Z, Kweon IS, et al. Convnext v2: co-designing and scaling convnets with masked autoencoders. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2023. p. 16133–42. [Google Scholar]
17. Deng J, Dong W, Socher R, Li LJ, Li K, Fei-Fei L. Imagenet: a large-scale hierarchical image database. In: 2009 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2009. p. 248–55. [Google Scholar]
18. Howard A, Sandler M, Chu G, Chen LC, Chen B, Tan M, et al. Searching for mobilenetv3. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2019. p. 1314–24. [Google Scholar]
19. Hu J, Shen L, Sun G. Squeeze-and-excitation networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2018. p. 7132–41. [Google Scholar]
20. Guo MH, Xu TX, Liu JJ, Liu ZN, Jiang PT, Mu TJ, et al. Attention mechanisms in computer vision: a survey. Computat Vis Media. 2022;8(3):331–68. doi:10.1007/s41095-022-0271-y. [Google Scholar] [CrossRef]
21. Qin Z, Zhang P, Wu F, Li X. Fcanet: frequency channel attention networks. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2021. p. 783–92. [Google Scholar]
22. Wang Q, Wu B, Zhu P, Li P, Zuo W, Hu Q. ECA-Net: efficient channel attention for deep convolutional neural networks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2020. p. 11534–42. [Google Scholar]
23. Yang Z, Zhu L, Wu Y, Yang Y. Gated channel transformation for visual recognition. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2020. p. 11794–803. [Google Scholar]
24. Krizhevsky A, Sutskever I, Hinton GE. Imagenet classification with deep convolutional neural networks. Adv Neural Inf Process Syst. 2012;25:84–90. [Google Scholar]
25. Liu Z, Lin Y, Cao Y, Hu H, Wei Y, Zhang Z, et al. Swin transformer: hierarchical vision transformer using shifted windows. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2021. p. 10012–22. [Google Scholar]
26. Mehta S, Rastegari M. Mobilevit: light-weight, general-purpose, and mobile-friendly vision transformer. arXiv:211002178. 2021. [Google Scholar]
27. Maaz M, Shaker A, Cholakkal H, Khan S, Zamir SW, Anwer RM, et al. Edgenext: efficiently amalgamated cnn-transformer architecture for mobile vision applications. In: European Conference on Computer Vision. Cham, Switzerland: Springer; 2022. p. 3–20. [Google Scholar]
28. Chen Y, Dai X, Chen D, Liu M, Dong X, Yuan L, et al. Mobile-former: bridging mobilenet and transformer. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2022. p. 5270–9. [Google Scholar]
29. Vasu PKA, Gabriel J, Zhu J, Tuzel O, Ranjan A. FastViT: a fast hybrid vision transformer using structural reparameterization. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2023. p. 5785–95. [Google Scholar]
30. Li Y, Hu J, Wen Y, Evangelidis G, Salahi K, Wang Y, et al. Rethinking vision transformers for mobilenet size and speed. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2023. p. 16889–900. [Google Scholar]
31. Li J, Xia X, Li W, Li H, Wang X, Xiao X, et al. Next-vit: next generation vision transformer for efficient deployment in realistic industrial scenarios. arXiv:220705501. 2022. [Google Scholar]
32. Shazeer N. Fast transformer decoding: one write-head is all you need. arXiv:191102150. 2019. [Google Scholar]
33. Chen J, Sh K, He H, Zhuo W, Wen S, Lee CH, et al. Run, don’t walk: chasing higher FLOPS for faster neural networks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2023. p. 12021–31. [Google Scholar]
34. Chen Y, Dai X, Liu M, Chen D, Yuan L, Liu Z. Dynamic relu. In: European Conference on Computer Vision. Cham, Switzerland: Springer; 2020, p. 351–67. [Google Scholar]
35. Mulindwa DB, Du S. An n-sigmoid activation function to improve the squeeze-and-excitation for 2D and 3D deep networks. Electronics. 2023;12(4):911. doi:10.3390/electronics12040911. [Google Scholar] [CrossRef]
36. Cubuk ED, Zoph B, Shlens J, Le QV. Randaugment: practical automated data augmentation with a reduced search space. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway, NJ, USA: IEEE; 2020. p. 702–3. [Google Scholar]
37. Zhang H, Cisse M, Dauphin YN, Lopez-Paz D. Mixup: beyond empirical risk minimization. In: International Conference on Learning Representations. Appleton, WI, USA: ICLR; 2018. [Google Scholar]
38. Yun S, Han D, Oh SJ, Chun S, Choe J, Yoo Y. Cutmix: regularization strategy to train strong classifiers with localizable features. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2019. p. 6023–32. [Google Scholar]
39. Zhong Z, Zheng L, Kang G, Li S, Yang Y. Random erasing data augmentation. Proc AAAI Conf Artif Intell. 2020;34(7):13001–8. doi:10.1609/aaai.v34i07.7000. [Google Scholar] [CrossRef]
40. Szegedy C, Vanhoucke V, Ioffe S, Shlens J, Wojna Z. Rethinking the inception architecture for computer vision. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2016. p. 2818–26. [Google Scholar]
41. Huang G, Sun Y, Liu Z, Sedra D, Weinberger KQ. Deep networks with stochastic depth. In: Computer Vision–ECCV 2016: 14th European Conference; 2016 Oct 11–14; Amsterdam, The Netherlands: Springer. p. 646–61. [Google Scholar]
42. Touvron H, Cord M, Sablayrolles A, Synnaeve G, Jégou H. Going deeper with image transformers. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2021. p. 32–42. [Google Scholar]
43. Polyak BT, Juditsky AB. Acceleration of stochastic approximation by averaging. SIAM J Cont Optimiz. 1992;30(4):838–55. doi:10.1137/0330046. [Google Scholar] [CrossRef]
44. Krizhevsky A. Learning multiple layers of features from tiny images. In: Handbook of systemic autoimmune diseases. Toronto, ON, Canada: University of Toronto; 2009. [Google Scholar]
45. Nilsback ME, Zisserman A. Automated flower classification over a large number of classes. In: 2008 Sixth Indian Conference on Computer Vision, Graphics & Image Processing. Piscataway, NJ, USA: IEEE; 2008. p. 722–9. [Google Scholar]
46. Krause J, Stark M, Deng J, Fei-Fei L. 3D object representations for fine-grained categorization. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV) Workshops. Piscataway, NJ, USA: IEEE; 2013. [Google Scholar]
47. Maji S, Kannala J, Rahtu E, Blaschko M, Vedaldi A. Fine-grained visual classification of aircraft. arXiv:1306.5151. 2013. [Google Scholar]
48. Desai S, Ramaswamy HG. Ablation-cam: visual explanations for deep convolutional network via gradient-free localization. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway, NJ, USA: IEEE; 2020. p. 983–91. [Google Scholar]
49. Lin TY, Maire M, Belongie S, Hays J, Perona P, Ramanan D, et al. Microsoft coco: common objects in context. In: Computer Vision–ECCV 2014: 13th European Conference; 2014 Sep 6–12; Zurich, Switzerland. p. 740–55. [Google Scholar]
50. He K, Gkioxari G, Dollár P, Girshick R. Mask R-CNN. In: Proceedings of the IEEE International Conference on Computer Vision. Piscataway, NJ, USA: IEEE; 2017. p. 2961–9. [Google Scholar]
51. Cai Z, Vasconcelos N. Cascade R-CNN: delving into high quality object detection. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE; 2018. p. 6154–62. [Google Scholar]
52. Loshchilov I, Hutter F. Decoupled weight decay regularization. In: International Conference on Learning Representations. Appleton, WI, USA: ICLR. 2018. [Google Scholar]
53. Wightman R. PyTorch Image Models. GitHub [Internet]; 2019. [cited 2025 Jan 14]. Available from: https://github.com/rwightman/pytorch-image-models. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools