
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

An Overview of LoRa Localization Technologies
1 Institute of Artificial Intelligence, Shaoxing University, Shaoxing, 312000, China
2 Department of Computer Science and Engineering, School of Mechanical and Electrical Engineering, Shaoxing University, Shaoxing, 312000, China
* Corresponding Author: Zhaoxi Fang. Email:
Computers, Materials & Continua 2025, 82(2), 1645-1680. https://doi.org/10.32604/cmc.2024.059746
Received 16 October 2024; Accepted 04 December 2024; Issue published 17 February 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Traditional Global Positioning System (GPS) technology, with its high power consumption and limited performance in obstructed environments, is unsuitable for many Internet of Things (IoT) applications. This paper explores LoRa as an alternative localization technology, leveraging its low power consumption, robust indoor penetration, and extensive coverage area, which render it highly suitable for diverse IoT settings. We comprehensively review several LoRa-based localization techniques, including time of arrival (ToA), time difference of arrival (TDoA), round trip time (RTT), received signal strength indicator (RSSI), and fingerprinting methods. Through this review, we evaluate the strengths and limitations of each technique and investigate hybrid models to potentially improve positioning accuracy. Case studies in smart cities, agriculture, and logistics exemplify the versatility of LoRa for indoor and outdoor applications. Our findings demonstrate that LoRa technology not only overcomes the limitations of GPS regarding power consumption and coverage but also enhances the scalability and efficiency of IoT deployments in complex environments.Keywords
In Internet of Things (IoT) applications, the traditional Global Positioning System (GPS) is commonly used for location tracking. However, its limitations, particularly in remote and low-power environments, are becoming increasingly evident. GPS devices typically consume a lot of power, making them unsuitable for scenarios that require long-term operation with limited energy resources. Furthermore, GPS often underperforms indoors or fails when obstructions are present, posing a significant challenge for IoT devices operating reliably across diverse environments.
In contrast, LoRa positioning technology is emerging as an ideal solution for IoT applications due to its low power consumption, strong indoor signal penetration, and wide-area coverage. LoRa technology maintains stable connectivity even in complex environments and offers superior long-range communication capabilities, making it highly adaptable for various IoT scenarios. For instance, in applications such as smart transportation [1], tourist guidance systems [2], and national defense security [3], LoRa devices provide low-power, high-precision positioning without the need for frequent replacement, thereby significantly reducing maintenance costs.
Additionally, the LoRa network supports a higher number of nodes and has robust anti-interference capabilities, enabling efficient operation in large-scale IoT networks [4]. Compared to Wi-Fi and Bluetooth Low Energy (BLE), LoRa offers a greater communication range and is less affected by signal interference, making it particularly effective in urban settings and complex indoor environments [5]. In addition, LoRa’s large network capacity allows it to accommodate more devices simultaneously, meeting the needs of large-scale IoT deployments [6].
Existing reviews provide an important theoretical foundation for research on LoRa and LoRaWAN technologies. Marquez et al. [7] provide an in-depth analysis of LoRa localization technology and the challenges of its multiple approaches, examining the advantages and disadvantages of localization metrics such as time and signal strength. However, the study is mainly limited to method summarization and lacks an effective evaluation framework to guide users in choosing a suitable solution for a specific application. On the other hand, Alipio et al. [8] provide a systematic review of testing and performance evaluation of LoRa and LoRaWAN, and despite summarizing the existing testing parameters and architectures, they lack a specific optimization strategy and do not delve into the practical application scenarios. These studies show that there is still room for exploring systematic approaches and application optimization in deploying LoRa technology.
This paper explores the applications and advantages of LoRa positioning technology in the IoT, and by comparing it with other positioning technologies, it emphasizes its unique characteristics in terms of low power consumption, wide coverage, and network capacity, which are particularly suitable for complex environments. The paper, which is supported by a number of practical examples, demonstrates the significant role that LoRa technology plays in meeting the growing demand for the IoT. It also provides a theoretical basis for the practical application of this technology and offers insights that will be of value in guiding future research in this field.
This section describes the methodology used in the literature review for this study to ensure systematicity and transparency.
2.1 Literature Search and Screening
In this study, Google Scholar was primarily used as a literature search tool, as it is efficient for initial screening and finding relevant literature quickly. In addition, databases such as IEEE Xplore, Springer Link, Web of Science, and Wiley were also included to ensure the diversity and authority of literature sources. During the search process, keywords such as “LoRa positioning technology,” “LoRa technology applications,” and “indoor and outdoor positioning technology” were emphasized. The timeframe was set to 2020–2024 to obtain the latest research results in this field.
To ensure the quality of the literature, we prioritize papers with high citation counts and focus on research published in reputable journals or conferences. In addition, the screening process considered the practical use of application cases and excluded literature that lacked systematic experiments and valid data support, thus ensuring the rigour and reliability of the review.
2.2 Methods of Analysis and Presentation of Results
In this study, we adopt a systematic data analysis methodology that combines quantitative and qualitative analyses to thoroughly assess the literature related to LoRa localization technology. First, we conducted an in-depth comparison and analysis of the experimental designs and performance metrics (e.g., positioning accuracy, energy consumption, and applicable scenarios) involved in each literature. This process focuses on the quality of data provided by the literature and its applicability in practice, aiming to reveal the unique advantages and application potential of LoRa technology in complex environments.
In addition, the findings provide insights into the success stories and challenges faced by LoRa technology in different application areas (e.g., smart cities, agricultural monitoring, logistics management, and search and rescue) by synthesizing and summarizing the empirical data from various literature. In particular, LoRa localization technology, with its core advantages of low power consumption, wide coverage, and large-scale network capacity, shows its wide application prospects in the growing demand for IoT. These research results provide an important reference for the further development and practical application of LoRa technology and lay a solid theoretical foundation for subsequent research in related fields.
LoRa, as a low-power WAN technology, integrates robust wireless communication with sophisticated signal processing for efficient transmission and precise positioning. This sections delineates its pivotal technologies, network architecture, and positioning principles.
3.1 Wireless Transmission Techniques
The emergence of low-power wide-area network (LPWAN) technologies has enabled IoT devices to maintain operation for years with constrained power consumption while maintaining low-rate communications with gateways several kilometers away. Such technologies have dramatically improved the connectivity of IoT devices, especially in urban environments, enabling deep coverage of widely distributed objects. As shown in Fig. 1, there are significant differences in power consumption and communication range between various current wireless communication technologies, ranging from near-field communication (e.g., NFC and RFID) to short-range communication (e.g., Wi-Fi and Bluetooth) to long-range LPWAN solutions, each of which has its applicable scenarios and characteristics.
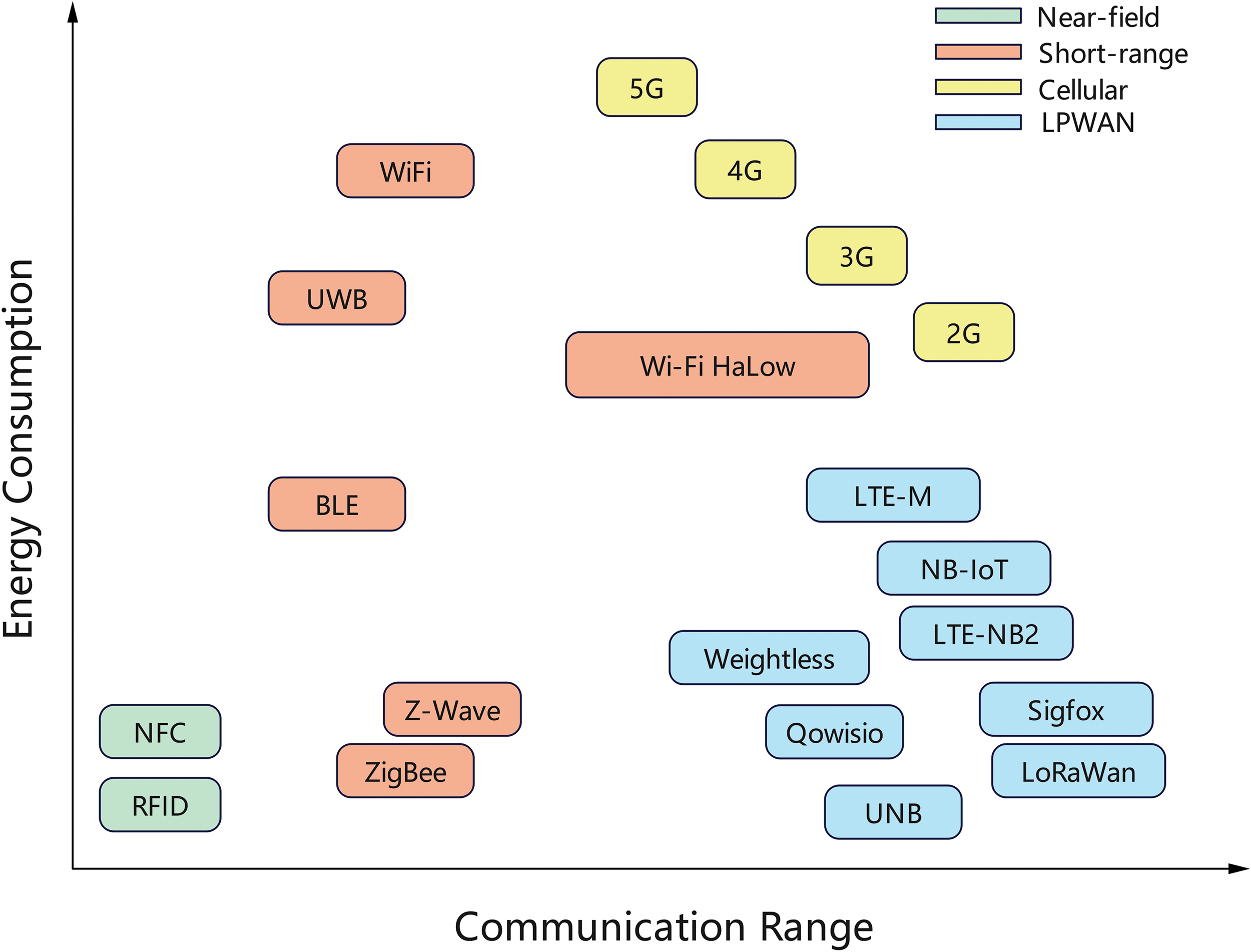
Figure 1: LoRaWAN vs. other technologies: power and range. Reprinted/adapted with permission from Reference [9]. Copyright 2018
In Fig. 1, the LPWAN category of technologies, such as Long Range Wide Area Network (LoRaWAN) [10], Sigfox [11], and Narrowband Internet of Things (NB-IoT) [12], demonstrates clear advantages in terms of low power consumption and long-range transmission. In contrast to traditional short-range, high-power technologies, LPWAN technology can not only communicate up to ten kilometers with very low energy consumption but also support up to several years of battery life. This feature is particularly important for IoT applications, as it allows many battery-powered sensors and devices to operate continuously in environments far from power sources, reducing maintenance costs and system complexity.
LoRaWAN, in particular, has a unique network architecture and openness that allows users to build their networks locally on demand without relying on traditional communication facilities. This flexibility and scalability make LoRaWAN increasingly popular for applications such as smart cities, real-time location, and environmental monitoring. Therefore, LoRaWAN, based on LoRa technology, is not only a low-power solution but also a key technology for IoT applications, becoming an indispensable part of the future intelligent society.
The core of LoRa technology is Chirp Spread Spectrum (CSS) modulation, which enables signals to be transmitted over long distances even in low signal-to-noise ratio (SNR) environments. CSS modulation enhances the signal’s resistance to interference and multipath effects by spreading the signal across a broader spectrum, making it essential for reliable long-distance communication.
LoRa operates on license-free Industrial, Scientific, and Medical (ISM) bands worldwide, such as the 863–870 MHz band in Europe and the 902–928 MHz band in the United States [13]. These bands allow LoRa devices to be deployed without a license, although compliance with regional standards and regulations is still necessary. It is important to note that different frequency bands offer varying performance levels: for example, 433 MHz modules provide stronger signals under the same conditions, while 868 MHz modules have a higher packet reception rate [14].
The low power consumption of LoRa technology allows devices to function for several years without needing battery replacements. This feature is particularly advantageous for applications requiring long-term operation, such as remote sensor networks and environmental monitoring systems, where frequent battery replacement is impractical. Regarding transmission range, LoRa can cover several kilometers in open areas and exceed 10 km under optimal conditions. Even in urban environments, LoRa can achieve greater communication distances than traditional Wi-Fi and Bluetooth technologies [15].
Additionally, LoRa offers adjustable transmission rates and bandwidth options, allowing for flexible configurations to balance transmission distance and data rate by modifying the spreading factor (SF). Higher SFs achieve longer transmission distances but lower data rates, while lower SFs provide higher data rates but shorter transmission distances [16]. By optimizing parameters like the SF, coding rate (CR), and bandwidth (BW) using mathematical models and artificial neural networks (ANN), network performance can be significantly enhanced. Studies have shown that these optimizations can increase air time, received signal strength indicator (RSSI), and received power by 48%, 12%, and 16%, respectively [17]. Moreover, applying algorithms such as K-nearest neighbors (KNN) further optimizes the dynamic adjustment of SF, enhancing data throughput and meeting reliability requirements [18].
This subsection will explore the two main forms: LoRaWAN and LoRa Mesh. By presenting them separately, we will reveal these two architectures’ unique advantages and adaptations for IoT applications.
LoRaWAN is a network protocol specifically designed for LPWAN. Developed by the LoRa Alliance and based on Semtech’s LoRa modulation technology, it is primarily used for IoT and Machine-to-Machine (M2M) communications. LoRaWAN supports long-range, low-data rate communication in license-free ISM bands and employs a star topology consisting of end devices, gateways, and network servers. End devices communicate directly with gateways through single-hop connections, while gateways relay data to network servers via Ethernet. LoRaWAN is optimized for uplink communication and includes three classes of devices—Class A, B, and C—each tailored to different application scenarios and power requirements [10]. The network architecture of LoRaWAN is shown in Fig. 2.
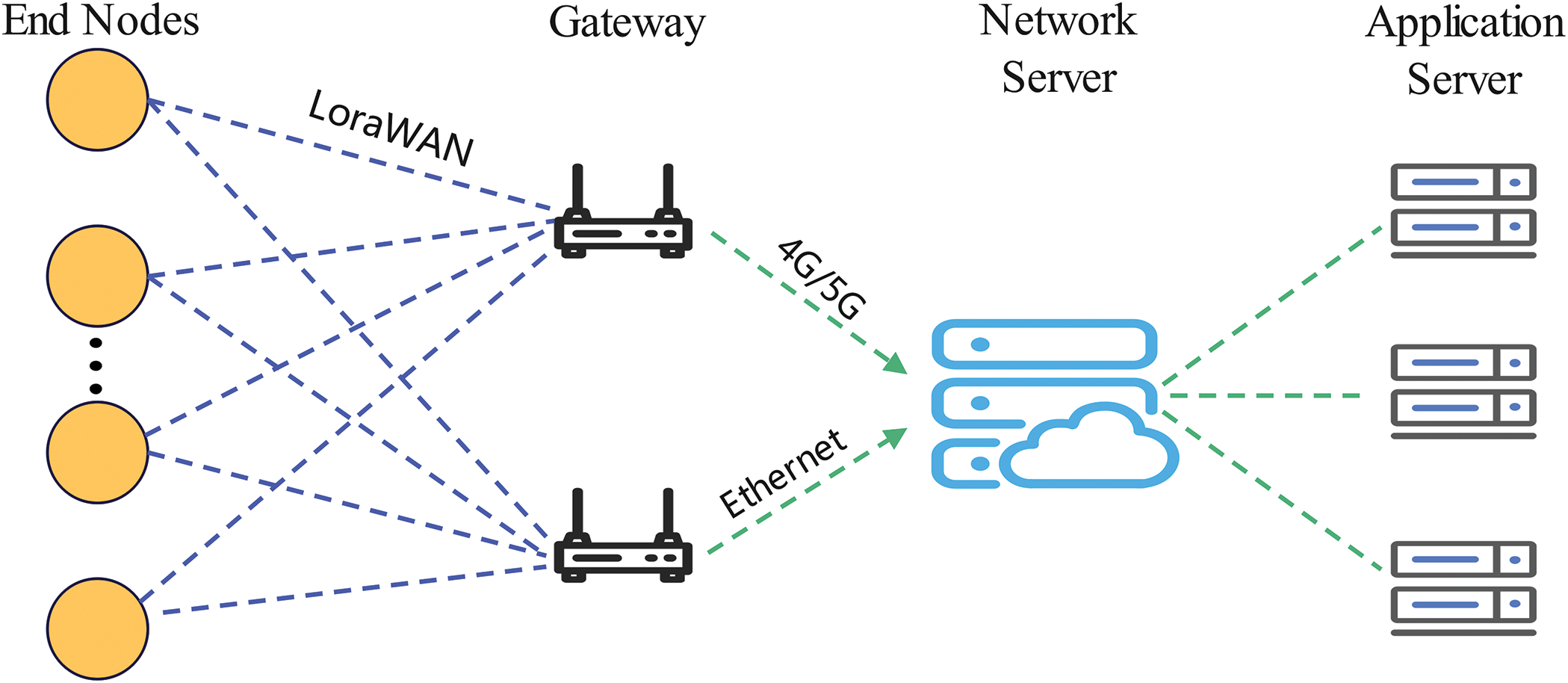
Figure 2: LoRaWAN network
While LoRaWAN offers several design advantages, its reliance on the pure ALOHA MAC protocol can result in packet collisions in densely populated device environments, potentially degrading network performance. To mitigate this issue, Fernandes et al. [6] proposed the LoRa-MAP protocol, which dynamically adjusts SF and BW and employs control packets for better coordination. This protocol significantly enhances network capacity and fairness while complying with duty cycle limitations. Simulations have demonstrated that LoRa-MAP provides substantial improvements in large-scale network environments.
Moreover, Abubakar et al. [19] introduced a machine learning-based approach to optimize gateway placement in LoRaWAN networks. Integrating constrained K-Means clustering, regression models, and neural networks reduces the average distance between devices and gateways and enhances the RSSI. Experimental results showed a 51% reduction in average distance and a 3% improvement in RSSI without increasing the number of gateways, demonstrating the efficiency of this optimization strategy.
LoRa Mesh is an advanced network architecture that enhances the coverage and flexibility of the LoRa network by enabling multi-hop communication between devices. Unlike the traditional star topology, LoRa Mesh allows devices to relay data to each other without needing a direct connection to a gateway, ultimately transmitting the data through multiple hops to reach the gateway. This approach expands network reach and improves its adaptability in various environments.
Li et al. [20] developed a low-cost, low-power, and wide-area outdoor positioning system based on LoRa Mesh that improves routing efficiency and conserves energy by simplifying the protocol stack and refining the packet format. Experimental results demonstrate that this system achieves high communication reliability and network efficiency, even in environments with a high density of devices. Shi et al. [21] enhanced the LoRa Mesh protocol by incorporating channel activity detection and cyclic redundancy check (CRC) validation mechanisms. These improvements reduce hardware conflicts and boost communication reliability, with experiments showing positioning accuracy comparable to GPS.
In a different approach, Kaven et al. [22] integrated a LoRa Mesh stage into the LoRaWAN network, allowing nodes to communicate directly with each other. By dynamically switching between LoRaWAN and LoRa Mesh, nodes can exchange RSSI data and perform location-based authentication. Simulation results indicate that this hybrid method significantly improves network security and authentication accuracy.
3.4 LoRa Positioning Technology
In this section, we will introduce six methods for LoRa positioning, including Time of Arrival (ToA), Time Difference of Arrival (TDoA), Round Trip Time (RTT), Angle of Arrival (AoA), RSSI, and fingerprint. Each technique has different characteristics in terms of positioning accuracy and application scenarios. Through these explorations, readers can more fluently understand the multidimensional advantages of LoRa positioning.
ToA determines distance by measuring the time required for a signal to travel from the transmitter to the receiver. The propagation time of the signal is proportional to the propagation distance, so by knowing the time and propagation speed, the distance between devices can be accurately calculated, which is given by
where d is the distance the signal travels, c is the speed of signal propagation, and t is the time the signal travels from the transmitter to the receiver.
The TDoA positioning method determines the location of the transmission source by measuring the time difference of signal arrival at multiple receiving points. Since the signal arrival times vary at different locations, the TDoA system calculates these time differences to deduce the geometric position of the transmission source relative to the receiving points, as shown in Fig. 3. Compared to ToA, TDoA does not require precise transmission time synchronization but only time synchronization between receiving points [23], making it particularly suitable for low-power, low-bandwidth IoT applications.
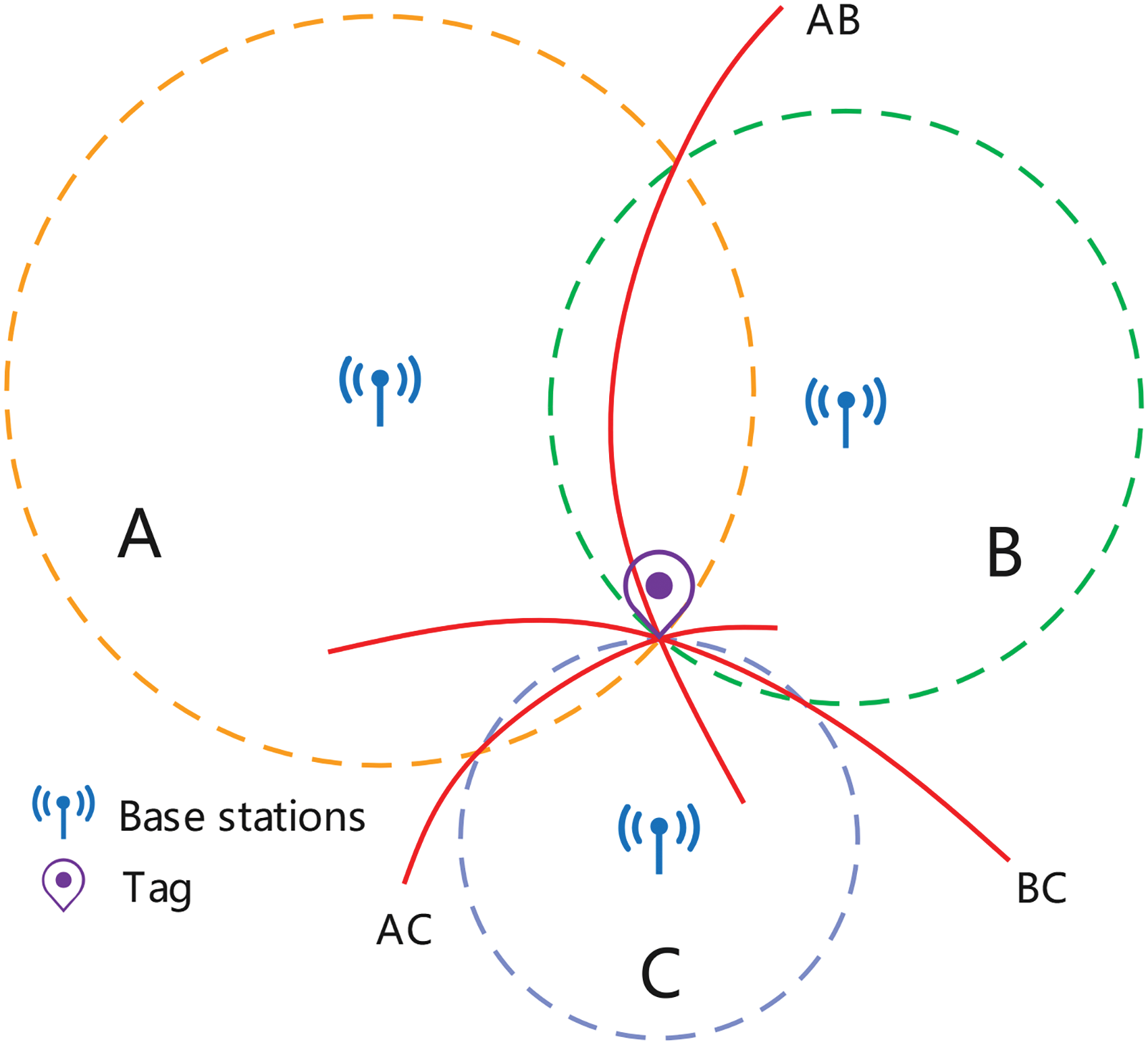
Figure 3: TDoA localization principle
RTT measurement estimates the total signal propagation time by sending a signal and recording its return time, thereby inferring the distance between devices. Unlike simple ToA, RTT takes into account the bidirectional delay of the signal’s round trip, offering more accurate distance measurement, especially in asymmetric links [24]. Time of Flight (ToF) is used to measure the one-way signal propagation time, and as a core component of RTT, it directly impacts the final distance estimation.
The AoA technique determines the location of the transmission source by measuring the angle at which the signal reaches the receiver’s antenna array, as shown in Fig. 4. The principle is based on the fact that signals arriving from different directions create phase differences across the antenna elements, and by calculating these phase differences, the azimuth angle of the signal source can be accurately estimated.

Figure 4: AoA localization technique
AoA is often combined with other ranging techniques, such as RSSI [25] or TDoA [26], to enhance positioning accuracy. Its advantage lies in its high resolution, particularly in environments with significant multipath effects. This makes it one of the key technologies for both indoor and outdoor positioning and high-precision navigation.
RSSI is a localization technique that estimates the distance of the source by measuring the received signal power. RSSI is based on a signal propagation path loss model, expressed as:
where d is the distance, n is the path loss exponent, and A is the signal strength at a reference distance. As the distance increases, the signal strength gradually weakens. Although RSSI is easy to implement and requires no additional hardware, its accuracy is easily affected by environmental factors such as obstacles, interference, and multipath effects, so it is usually used for rough localization or as a supplement to other techniques.
3.4.6 Fingerprint Localization
Fingerprint localization is used to achieve high-precision positioning by pre-constructing a signal-characteristic database of the environment. Its principle includes two stages: the offline stage and the online stage. For the offline stage, the signal characteristics of various reference points (such as RSSI [27] and TDoA [28]) are collected to form a fingerprint database. For the online stage, the current measured signal characteristics are matched with the fingerprint database to determine the device’s location. The specific process is shown in Fig. 5.

Figure 5: General process of fingerprint localization method
3.5 Key Techniques for LoRa Positioning
Signal processing techniques ensure positioning accuracy and reliability in LoRa positioning systems. This section will focus on two core technologies: filtering and time synchronization.
Filtering techniques are essential for enhancing localization accuracy in LoRa networks. Anugrah et al. [29] utilized a Kalman filter to optimize RSSI signals, significantly reducing noise interference and improving positioning accuracy, particularly in non-line-of-sight environments. Similarly, Bansal et al. [30] applied a particle filter in the outdoor whitespace-band LoRa localization (OwLL) system, adjusting weights through probability distributions and iterative algorithms. This approach enhanced the robustness of signal processing and effectively mitigated multipath interference in urban settings, achieving high-precision positioning. Savazzi et al. [31] introduced a Wiener filtering method that substantially improved RSSI ranging accuracy and positioning precision by fine-tuning channel model parameters during the training phase.
Hybrid filtering methods further enhance the stability and accuracy of signal processing in LoRa networks. Khriji et al. [32] combined Kalman filtering with simple moving average (SMA) filtering, significantly reducing distance measurement errors and a 65%–77% decrease in localization errors compared to a single filter. Hemanth et al. [33] merged mean filtering with good-value filtering to dynamically adjust the smoothness and reliability of RSSI data. This hybrid approach effectively reduced noise and outliers, lowering positioning errors to within 10–90 cm.
Using single and hybrid filtering techniques in LoRa network localization has demonstrated substantial improvements in signal processing accuracy and robustness. These methods show excellent positioning performance, particularly in complex environments where conventional approaches may struggle.
3.5.2 Time Synchronization Techniques
Time synchronization is critical for the effective operation of LoRa localization systems, particularly in indoor environments where it directly impacts positioning accuracy and overall system performance. The smooth nature of LoRa signal waveforms makes it challenging for gateways to achieve precise timing with the ToA method, while the TDoA method can be significantly affected by synchronization issues between timestamps. To overcome these challenges, Müller et al. [13] developed a technique to eliminate relative clock bias through back-to-back ranging, enabling outdoor localization with an average error of less than 50 m within a 1400-m range. Additionally, Ruthwik Muppala’s LoRaWAN time synchronization method enhanced gateway time consistency by introducing synchronization nodes, which substantially reduced indoor localization errors [23].
To further enhance indoor localization accuracy, researchers have developed various innovative time synchronization techniques. Rus et al. [15] improved the TDoA localization process by synchronizing timestamps of anchor gateways and using multilayer algorithms, achieving low-power and high-precision indoor localization. Similarly, Guo et al. [34] introduced Just-In-Time (JIT) synchronization technology, which uses synchronization frames to correct clock drift in anchor nodes. This method simplifies the synchronization process while enhancing positioning accuracy. These advancements not only improve localization precision but also optimize system power consumption and reduce complexity, making them highly effective for various indoor applications.
4 Classification of LoRa Localization Schemes
This section systematically classifies LoRa localization schemes, detailing their characteristics and applications across various indoor and outdoor environments. Fig. 6 illustrates these classifications, while Table 1 presents complementary data.

Figure 6: Classification of Lora localization schemes

Outdoor localization techniques are mainly used to acquire high-precision location information in open environments. This section discusses them from different technical perspectives, including ranging-based localization, non-ranging localization, multi-data fusion localization, and schemes to enhance localization capability with the help of LoRa technology. The principles and application scenarios of these methods are described in detail below.
4.1.1 Range-Based Localization
ToA:
MUSIC & TLS-ESPRIT with Multi-Band Enhancement (MTLME) [35]: MTLME introduces three localization algorithms—matched filter, Fast Beamforming Correlation-based MUSIC (FBCM-MUSIC), and Total Least Squares Estimation of Signal Parameters via Rotational Invariance Techniques (TLS-ESPRIT)—alongside a multi-band architecture to optimize ToA estimation. Simulation results indicate that FBCM-MUSIC and TLS-ESPRIT outperform in non-line-of-sight (NLOS) environments, and the multi-band architecture significantly enhances localization accuracy by reducing the 90% quantile error by approximately 40%.
ToA Variance and Weighted HDOP for Navigation [36]: This study evaluated the repeatable positioning accuracy of LoRa in navigation by combining ToA variance and Weighted Horizontal Dilution of Precision (HDOP). SNR, SF, and path loss models were utilized to optimize positioning accuracy. The results demonstrate that LoRa achieves accuracy comparable to mainstream navigation systems under different gateway intervals, showcasing its potential as an opportunistic signal for navigation.
CRLB and 3D Building Models in LPWA Networks (CRLB-3D) [37]: Based on ToA in LPWA network localization, this technique combined the Cramér-Rao Lower Bound (CRLB) with 3D building models to generate a localization accuracy map (LAM). Field tests conducted in Grenoble demonstrated that the Maximum Likelihood Estimation (MLE) algorithm under six gateways achieved 88% high prediction accuracy, illustrating the reliability and effectiveness of this method in urban environments.
TDoA:
Road Map and Mobility Enhanced Localization (RMMEL) [38]: Developed a localization algorithm that combines road maps and mobility speed to optimize the localization accuracy of LoRa networks. The study showed that SF 8 was most effective for update frequency, reducing the median error from 200 to 75 m, demonstrating the potential for high-precision localization in diverse mobile environments. Additionally, they proposed that time difference-based localization methods achieve lower median errors, around 200 m, compared to Received Signal Strength (RSS) methods [39].
Social Learning Particle Swarm Optimization for Localization (SL-PSO-Loc) [40]: This study proposed a Social Learning Particle Swarm Optimization (SL-PSO) algorithm that significantly reduced localization errors by mimicking the best-performing individuals in the group. This algorithm has demonstrated excellent localization accuracy in real deployments, even under noise interference.
Deep Neural Network Enhanced Localization (DNN-EL) [41]: Applied Deep Neural Network (DNN) technology to optimize the localization method of LoRaWAN networks. Training the DNN to correct time errors in signal transmission significantly improved the localization accuracy, especially when the reference and mobile nodes were close.
Optimal Wireless Localization Using LoRa (OwLL) [30]: Proposed an innovative LoRa localization system, OwLL, which combines TDoA technology with TV white spaces and a distributed base station network to achieve high-precision localization for commercial-grade LoRa clients. OwLL achieved a localization accuracy of 9 m median error in large-scale urban by optimizing frequency hopping strategies.
RSSI:
Trilateration-Based Low-Cost Localization Systems (TLLS) [42]: A cost-effective localization system was developed through an evaluation of the timing measurements and radio frequency characteristics of Pycom LoRa hardware, coupled with the utilization of trilateration algorithms. In field tests in high-altitude rural areas, the system achieved a localization error of less than 7% of the maximum distance between anchor nodes, validating its effectiveness and accuracy in specific application scenarios. Additionally, another study further optimized the localization accuracy using reverse link RSSI values in a
Distributed Localization with Normalized Quadrilateral Measurement (DLNQM) [2]: The normalized quadrilateral measurement method was used to achieve distributed localization in LoRa networks, effectively optimizing location estimation errors. The study results showed that the average error rate was significantly reduced from 44.17% to 15.22%.
Weighted Centroid Method (WCM) [44]: A weighted centroid localization method suitable for large outdoor areas was proposed. This method was optimized by combining RSSI technology with Kalman filtering, achieving localization accuracy comparable to fingerprinting methods without requiring a training phase, demonstrating its cost-effectiveness over traditional TDoA techniques.
Random Neural Network Optimization (RNN-Opt) [45]: By fine-tuning the parameters of the random neural network (RNN), node localization based on RSSI values in LoRaWAN networks was optimized. Experiments showed that using a minimum learning rate of 0.001 reduced the average localization error to 0.29 m, demonstrating the potential of RNNs in accurately processing RSSI data for urban environments.
Edge-AI Enhanced Localization [46]: By introducing artificial neural networks (ANN) in edge AI to learn meteorological impacts, the localization accuracy of LoRaWAN was significantly improved. Experimental results showed that RSSI-based distance estimation accuracy improved by 6% to 49%, with a reduction of approximately 101 m in localization error, proving the effectiveness of this method in dynamic environments.
ToF:
Mobile Anchor Gateway for IoT Centralization (MAGIC) [47]: The MAGIC system utilizes a single mobile anchor equipped with a LoRa gateway and smartphone for multi-target IoT device localization. By combining maximum MLE and ToF ranging techniques, the system significantly improves localization accuracy in various environments. Experimental results showed that the MAGIC system achieved localization accuracy within 3 m in outdoor environments, making it a low-cost and energy-efficient solution for multi-target localization.
4.1.2 Non-Ranging Based Localization
AoA:
Frequency-Hopping Estimation System (FHES) [48]: A frequency-hopping signal angle of arrival (AoA) estimation system based on software-defined radio (SDR) was proposed. The system employs a coarse-to-fine strategy, integrating the fast Fourier transform (FFT) and multiple signal classification (MUSIC) algorithms, and mitigates interference through the utilization of a Fourier band-pass filter. In outdoor experiments, the algorithm demonstrated a root mean square error (RMSE) of less than
Fingerprint:
Probabilistic RSSI-Based Fingerprinting Localization (PRFL) [27]: A probabilistic method-based RSSI fingerprinting localization system was proposed. This method constructs an RSSI signal strength map and uses probabilistic methods to estimate device locations. Experimental results show an average localization accuracy of 28.8 m in outdoor environments, demonstrating its wide potential in IoT applications.
KNN-Enhanced Campus Positioning (KECP) [49]: For campus environments, the KNN algorithm was used to achieve LoRa-based outdoor localization. In tests conducted in two different areas, the root mean RMSE was 3.8 and 2.9, respectively, validating the algorithm’s stability and accuracy in various environments.
Neural Network-Based Urban Localization (NNUL) [50]: A neural network-based RSSI fingerprinting localization method was proposed for LoRa network localization in urban environments. Although this method showed some improvement on datasets from Utrecht and Antwerp, the average localization error ranged from 411 to 581 m compared to KNN, revealing the potential for optimizing neural network structure and hyperparameters.
Time-Weighted Fingerprint Positioning (TWFP) [51]: A time-weighted LoRa localization system was developed by combining path loss models, machine learning, and deep learning techniques. The system achieved localization accuracy of 6 to 15 m in line-of-sight and non-line-of-sight environments, providing important insights into the impact of time-weighting on RSSI fingerprinting localization for further algorithm optimization.
AI-Enhanced Location-Based Services (AI@LBS) [52]: The AI@LBS system optimized the fingerprinting mechanism of LoRa signals using the Density-Based Spatial Clustering of Applications with Noise (DBSCAN) algorithm and Synthetic Minority Oversampling Technique (SMOTE) technique, increasing localization accuracy from 95.37% to 99.17%. In campus tests at Taiwan Tech, the system achieved an average error of 0.48 m, demonstrating high-efficiency localization capabilities in outdoor environments.
Transfer Learning-Based Positioning (TLBP) [53]: Transfer learning techniques were used to optimize the RSSI localization strategy for LoRa. Using TensorFlow and Google Colab for model training, results showed an average localization error of 570.43 m in outdoor environments, significantly improving accuracy.
Satellite-Based Localization with Virtual Fingerprinting (SateLoc) [54]: The SateLoc system proposed a LoRa outdoor localization method using high-resolution satellite images to generate virtual fingerprint maps. By combining iterative path loss models and multi-gateway combination strategies, SateLoc achieved a median error of 43.5 m within a 227,500 square meter urban area, improving localization accuracy by over 50% and demonstrating significant advantages in low-power wide-area network localization.
LoRa-Based Machine Learning Localization System (LoRaLoc) [28]: A localization system based on LoRa and machine learning (LoRaLoc) was proposed. The system combines TDoA measurements and real GPS positions to create a reference map. In simulated urban environments, the Long Short-Term Memory (LSTM) network achieved a root mean square error of less than 9 m, validating the accuracy and potential of this technology under non-line-of-sight conditions.
4.1.3 Multi-Data Hybrid Localization
Weighted ToF-RSSI Multilateral Localization (WTR-ML) [55]: A weighted multilateral hybrid localization system combining ToF and RSSI was developed. Through optimization with a weighted multilateral localization estimator, the system achieved an average localization error of 272 m in a stationary state, showing potential for use in low-power wide-area networks.
Long Range Wireless Area Positioning System (LoRaWAPS) [21]: An outdoor wide-area positioning system based on LoRa Mesh. By designing a low-power LoRa Mesh protocol and optimized ranging and positioning algorithms, a positioning accuracy comparable to GPS is achieved. Experimental results show that the average positioning error of the system is less than 5 m, and the maximum error is less than 10 m under high-density anchor deployment.
Simplified RSSI-AoA Hybrid Localization (SRAHL) [25]: A hybrid RSSI-AoA localization system for LoRa IoT devices was proposed, using a single TMA receiver to simplify hardware configuration, enabling real-time position estimation without complex algorithms. Experiments showed that the system could accurately localize LoRa terminal devices, though the accuracy may be slightly lower than traditional multi-receiver systems, offering a more economical and practical solution.
TDoA-AoA Combined Localization (TACL) [26]: A LoRaWAN network localization method combining TDoA and AoA was proposed. Through simulation experiments, localization was achieved using only two gateways, with a TDoA average error of 548 m, which was reduced to 399 m when combined with AoA. Despite the relatively high error, this method showed potential for improving LoRaWAN localization accuracy under limited gateway conditions.
Ensemble Multi-Signal Positioning (EMSP) [56]: A hybrid localization system was proposed based on RSS and TDoA data. Through optimization using kNN and random forest regression (RFR), an average error of 332.63 m and a median error of 193.63 m were achieved. Although the improvements were limited, data fusion significantly enhanced localization accuracy compared to using a single data type.
Ultrasound-Optimized Signal Positioning (UOSP) [57]: A hybrid localization technique combining LoRa and ultrasound signals was developed aimed at enhancing localization accuracy in high-density outdoor wireless sensor networks (WSNs). By optimizing LoRa transmission parameters and integrating precise ultrasound distance measurements, this method theoretically could significantly improve localization accuracy, though further experimental validation is required.
Differential Fingerprint Localization with SSD and TDoA (DFL-ST) [58]: A differential fingerprint localization method combining signal strength difference (SSD) and TDoA was proposed. This method was trained using random forest (RF) and multilayer perceptron (MLP) algorithms, with the optimized MLP-OoRD model achieving an average error of 310 m and a median error of 57 m under time-series data partitioning, demonstrating efficient hybrid signal localization capabilities.
4.1.4 LoRa-Assisted Localization
LoRa Prisoner Transport Monitoring (LPTM) [59]: A prisoner transport tracking system combining LoRa long-range communication with precise GPS localization was proposed. By collecting and transmitting location data in real-time, continuous monitoring of transport vehicles is achieved. Despite technical challenges such as duty cycle limitations, this system demonstrated the potential of multi-technology integration to enhance transportation safety and efficiency.
LoRaWAN GPS Bio-Logger (LoG-BioLog) [60]: A LoRaWAN-based GPS bio-logger was developed, optimizing data transmission and Global Navigation Satellite System (GNSS) positioning to achieve high localization accuracy and long-range communication. Tests with vultures demonstrated that the device can accurately track animal movements, offering low power consumption and high-resolution advantages, making it an effective tool for studying animal behavior and ecology.
LoRa-Assisted Train Positioning (LATP) [61]: A LoRa-based train-assisted localization system is proposed. The system determines the relative positions of the train and transponder using RSSI peaks and achieves precise positioning by integrating envelope analysis with odometer (ODO) data. The experimental results show that the positioning accuracy of the system is 1.32, 2.15, and 3.4 m at different speeds. The system has a high positioning accuracy at low speeds. However, the error rises with the speed increase, indicating that its stability and accuracy need to be further optimized in high-speed environments.
Outdoor localization techniques for LoRa networks exhibit significant diversity and differentiated performance. ToA and TDoA techniques provide high localization accuracy under multi-base station conditions, but sensitivity to multipath effects and noise limits their stability in complex environments. Although favored for simplicity of implementation and low cost, RSSI methods are significantly affected by environmental variations in their localization accuracy. In contrast, ToF technology performs well in open fields, while AoA achieves high-precision localization with complex antenna arrays, albeit at a higher equipment cost. Fingerprint recognition and multi-data fusion technologies demonstrate significant accuracy gains in complex environments through algorithm optimization, making them potential solutions to environmental challenges.
To visualize the performance of different technologies in outdoor scenarios, Fig. 7 integrates and compares these methods based on the results of several studies. Representative methods are selected for each technique, such as RMMEL [38], OwLL [30], TLLS [42], DLNQM [2], MAGIC [47], FHES [48], PRFL [27], SateLoc [54], LoRaLoc [28], and LoRaWAPS [21]. The evaluation metrics of positioning error (e.g., median, mean, MSE, RMSE, or percentage) are labeled to ensure the scientific rigor and comparability of the data. This analysis highlights the relative advantages of each technique and provides key insights into their suitability in different application scenarios.

Figure 7: Outdoor localization accuracy for different techniques
Unlike outdoor environments, indoor localization is challenged by signal occlusion and multipath reflections, demanding more sophisticated technical approaches. This section introduces various indoor localization methods, including ranging-based, non-ranging, multi-data fusion, and LoRa-assisted, and discusses their applicability in different application scenarios.
4.2.1 Distance-Based Positioning
ToA:
LoRa-Centroid Localization Model (LCM) [62]: A LoRa indoor positioning simulation model combining ToA and Centroid techniques was developed on the OMNeT++ platform. Research shows that by optimizing the number of measurements and threshold settings, the model achieves an optimal balance between response time and positioning accuracy. This approach reduces experimental costs and strongly supports low-power, wide-coverage indoor positioning applications.
LLS-Minimum-Residual Algorithm (LMR) [63]: To address the impact of NLOS errors, a 3D indoor positioning algorithm based on ToA was proposed. This algorithm accurately calculates the target location by estimating and correcting NLOS errors combined with the Linear Least Squares (LLS) method. Simulation results show that compared to traditional Minimum Residual (MR) and Minimum Distance (MD) algorithms, this method significantly improves positioning accuracy in 2D and 3D environments, laying the foundation for high-precision positioning in complex indoor environments.
TDoA:
TDoA Synchronization Enhancement (TSE) [33]: A LoRaWAN-based TDoA positioning algorithm was proposed, which addressed the gateway time synchronization issue by introducing synchronization nodes (TSE), significantly improving positioning accuracy. Experimental results indicate that this method exhibits favorable signal propagation characteristics and low positioning errors in urban environments.
In-Hall Localization Optimization (ILLOC) [34]: The ILLOC system was developed by combining LoRaWAN and TDoA technologies and optimizing through Dynamic Spectrum Selection (DPS) and Just-In-Time (JIT) scheduling, overcoming narrowband and clock synchronization issues in indoor positioning. This system achieved a median positioning accuracy of 6 to 15 m in a real hall environment, demonstrating its potential applications in asset tracking and security monitoring.
RSSI:
Kalman Filter-Enhanced (KF) [64]: A LoRa-based GPS-free positioning system that utilizes RSSI data combined with a Kalman filter to enhance positioning accuracy, particularly suitable for indoor environments. Experimental results show that under LoS conditions, the system’s 90% positioning error is 0.82 and 1.17 m under NLoS conditions, demonstrating LoRa’s practicality in environments where GPS signals are obstructed.
LoRa Backscatter Room-Level Localization (LBRL) [5]: A room-level positioning system based on LoRa backscatter was proposed, which locates by comparing received RSSI data and is optimized using a machine learning classifier, ultimately achieving up to 89.7% positioning accuracy. This system is suitable for applications such as smart homes, elder care, and hospital patient tracking.
Adaptive Cell-Level Localization (ACL) [65]: An adaptive cell-level positioning algorithm based on LoRa was proposed. This algorithm estimates the path loss index using RSSI and dynamically partitions virtual cells to achieve precise localization. Experimental results show that the system’s positioning error ranges from 1.85 to 4.63 m under different transmission powers. Although slightly less accurate than Wi-Fi, the system’s positioning accuracy is significantly improved through transmission power optimization, making it especially suitable for complex indoor environments.
Neural Network Localization (NN) [66]: A LoRaWAN indoor positioning system combining RSSI and SNR data was proposed, utilizing a neural network model for location estimation. This system achieved 98.8% positioning accuracy for logistics use cases like pharmacy delivery and document dispatch, and its reliability was validated through experiments with varying gateway densities.
BP Neural Network Localization (BP-NN) [67]: A LoRa indoor positioning system was developed using an improved Backpropagation (BP) neural network and mean evolution algorithm. It achieves positioning with an average error of 0.7 m and a minimum error of 0.2 m, which is particularly suitable for firefighting robots locating trapped individuals.
Log-Normal Shadowing Model with BP Neural Network (LN-BPNN) [68]: A LoRaWAN indoor positioning method was proposed based on a BP neural network. It combines a Log-normal shadowing model to filter and optimize RSSI, achieving an average error of 0.5971 m and high-precision positioning.
3D Localization with Signal Strength and Altimeter (3D-SSA) [69]: A LoRa-based indoor 3D positioning system was proposed, using RSSI and altimeter data and optimizing the traditional trilateration method through experimental parameter adjustments. Test results show that this system improved positioning accuracy by 80% in indoor environments, achieving a 95% confidence interval of 0.121 m.
RSSI-Based Adaptive Trilateration (RAT) [70]: An adaptive trilateration algorithm based on RSSI was developed, combined with a circle expansion method, and evaluated using BLE, Wi-Fi, ZigBee, and LoRaWAN technologies. Experimental results show that this algorithm increased positioning accuracy by 33% in LoRaWAN.
Adaptive RSSI Localization (ARL) [4]: An adaptive indoor positioning method based on LoRa devices was proposed, combining dynamically selected optimal filters, anchor nodes, and positioning algorithms to achieve high-precision localization, particularly suitable for environments like large rooms, with advantages of low cost and high efficiency.
RTT:
Particle Filtered Pseudorange Correction (PFC) [24]: A LoRa RTT-based indoor positioning system was studied, and a pseudorange fitting correction method combining a particle filter was proposed. The approach utilizes a segmented linear fitting formula, which is presented as follows:
where R is the original pseudorange measurement, and
4.2.2 Non-Ranging Based Localization
AoA:
SDR-Based AoA Estimation (SYLOIN) [71]: A LoRa signal AoA measurement method based on an SDR platform named SYLOIN was proposed. Using antenna array interferometry and FFT technology, this system achieved an AoA measurement with an average error of less than 5 degrees in an
Compact AoA Estimation (CAE) [72]: A compact AoA estimation system based on LoRa, CAE, was proposed. It utilizes low-cost hardware and cloud algorithms to achieve 4 to 14 degrees of positioning accuracy in indoor environments despite not accounting for multipath effects.
Deep Learning-Based AoA Network (DeepAoANet) [73]: A deep learning-based AoA estimation algorithm named DeepAoANet was proposed, which significantly improved AoA estimation accuracy in multipath and low signal-to-noise ratio environments by analyzing single snapshots of multi-channel data. Experimental results showed that DeepAoANet achieved high accuracy with an average absolute error of less than 2 degrees in various indoor environments.
LoRa-MUSIC Algorithm (LMA) [74]: A LoRa AoA positioning algorithm based on the MUSIC algorithm, named LMA, was developed, achieving an average positioning error of 48.5 cm on a
LoRa Tracking System (LTrack) [75]: A LoRa-based indoor tracking system named LTrack was proposed, which achieved precise AoA estimation for mobile robots through lightweight hardware modifications and system optimization. Experimental results showed that LTrack achieved robust tracking with a median error ranging from 0.12 to 0.45 m in various environments.
Fingerprint localization:
KNN-Optimized Fingerprint Navigation (KFN) [76]: A LoRa-based RSSI fingerprint navigation system was proposed, which significantly improved positioning accuracy through KNN algorithm optimization. Experimental results showed that this system effectively enhanced positioning accuracy in indoor navigation.
Differential Evolution KNN (DE-KNN) [77]: The DE-KNN algorithm was developed for accurate indoor wireless sensor network positioning. This algorithm combines differential evolution and K-nearest neighbor techniques, significantly enhancing positioning accuracy in diverse environments, achieving over a 30% accuracy improvement, and is suitable for various wireless communication technologies, including LoRa.
Optimized LoRa Fingerprinting Using MKNN (OLFM) [78]: A LoRa indoor positioning algorithm for multi-story circular buildings is proposed to optimize the positioning accuracy by collecting RSSI and SNR fingerprint data and improving the traditional K-nearest neighbor algorithm (MKNN). Experiments show that MKNN performs best in accuracy and complexity, with 88.57% localization accuracy compared to the traditional method. The combination of RSSI and SNR effectively mitigates the multipath effect and noise interference, compensating for the limitations of single RSSI data.
Temporal-Enhanced DGPR Fingerprinting (TEDF) [79]: A fingerprint localization method combining two-layer deep Gaussian process regression (DGPR) is proposed to overcome the nonlinearity of signal propagation in industrial environments using dynamically collected RSSI features. To cope with the time variation of RSSI, time-weighted RSSI averaging with Kalman filter optimization is innovatively introduced. Experimental results show that the system’s positioning error in dynamic industrial environments averages 1.94 m, which substantially outperforms static datasets and traditional machine learning methods.
CNN-Enhanced Fingerprinting (CEF) [80]: A LoRaWAN network fingerprinting method enhanced by CNN and SE blocks was proposed. This method improved data representation and feature extraction, achieving an average positioning error of 284.57 m while reducing the training data size and increasing positioning accuracy by 8.39%.
MLP-GAN RSSI Localization (MGRL) [81]: An indoor localization method based on the LoRaWAN network is proposed using deep learning models such as LSTM, CNN, and RNN for comparison and combined with Adam optimizer for RSSI data. In the experiments, the highest accuracy of 96.512% can be achieved using MLP and Generative Adversarial Network Deep Learning (GAN DL) models and Adam optimizer under exponential RSS type, which significantly improves the localization accuracy.
4.2.3 Multi-Data Hybrid Localization
RTT-Enhanced RSS Fingerprinting (RERF) [82]: An indoor positioning algorithm based on LoRa, combining RTT-ranging fingerprints and RSS data to improve positioning accuracy. This algorithm optimizes the fingerprint-matching process through multi-threshold values and uses an MLP to learn the mapping between signal characteristics and location coordinates. Experimental results show that under NLOS and mixed NLOS/LOS conditions, this method achieved an average positioning accuracy of less than 1 m, significantly outperforming traditional multilateral methods.
MNN-Enhanced CSI Localization (MNN-CSI) [83]: An indoor positioning framework that uses partial channel state information (CSI) and physical layer indicators collected by LoRaWAN networks, achieving over 90% positioning accuracy through a multilayer neural network (MNN).
WiFi-RTT/LoRa Underground Positioning (WiLo-UP) [84]: An underground positioning method combining Wi-Fi RTT and LoRa technologies, integrating a fingerprint database of signal strength and round-trip time, along with access point availability features, optimizing positioning through a nearest neighbor matching algorithm. In actual underground quarry tests, this method achieved 85% of test data errors below 15 m, enhancing monitoring accuracy and management efficiency in mining operations.
4.2.4 LoRa-Assisted Localization
Kalman-Enhanced BLE/LoRa Localization (KBL) [85]: The research team introduced Kalman and particle filters [86] to deeply optimize the LoRa-assisted BLE RSSI indoor localization algorithm. In non-line-of-sight conditions, the optimized system achieved a positioning error of less than 1.20 m in 90% of cases, significantly improving localization accuracy.
BLE/LoRa Real-Time Positioning (BL-RT) [87]: A BLE iBeacons and LoRa Tracker-based indoor positioning system was developed, achieving up to 99.5% accuracy on the The Things Network (TTN) and Ubidots platforms using the RSSI fingerprint localization algorithm.
GPS/UWB-RTLS Integrated LoRaWAN Node (GULN) [88]: A LoRaWAN node integrated with GPS and Ultra-Wideband Real-Time Location System (UWB-RTLS) was developed, and experimental results showed that the system achieved positioning accuracy within tens of meters in outdoor environments and tens of centimeters in indoor environments.
Indoor localization technologies offer distinct advantages across various application scenarios. ToA and RTT methods achieve high-precision localization in multipath and dynamic environments, particularly when enhanced by filtering and correction algorithms. The RSSI method broadens its applicability and improves accuracy when combined with machine learning. Although TDoA provides broad coverage, its accuracy is comparatively lower. AoA technology, especially when supported by deep learning techniques, excels in complex indoor environments. Fingerprint localization, utilizing multi-data fusion and optimization algorithms, demonstrates exceptional robustness and precision. Additionally, LoRa hybrid and assisted localization methods further enhance the strengths of these technologies, significantly boosting localization accuracy.
Fig. 8 compares the accuracy performance of different indoor localization methods based on the above study. A representative technique is selected for each method, including LMR [63], ILLOC [34], KF [64], ACL [65], LN-BPNN [68], PFC [24], DeepAoANet [73], LMA [74], TEDF [79], and RERF [82]. Their performance is evaluated using error metrics such as median and mean. This comparison provides an intuitive reference for technology selection and application scenario adaptation.

Figure 8: Comparison of the accuracy of indoor localization technology
4.3 Indoor-Outdoor Hybrid Localization
To achieve continuous localization with a seamless transition from indoors to outdoors, researchers have proposed a variety of indoor-outdoor fusion localization schemes. This section discusses these schemes categorized into ranging-based positioning, non-ranging-based positioning, multi-data fusion positioning, and LoRa-assisted positioning, aiming to provide a comprehensive overview of the field.
4.3.1 Range-Based Localization
ToA:
Probabilistic Bayesian Localization (PBL) [89]: A probabilistic Bayesian localization method based on ToA was proposed for high-precision indoor-outdoor localization in LoRaWAN IoT environments. This method integrates Gaussian noise and prior information to accurately compute the posterior probability density functions (pdfs) of the target’s location, avoiding the limitations of traditional point estimation methods and demonstrating exceptional accuracy and adaptability in complex and dynamic environments.
TDoA:
TDoA Kalman Localization (TKL) [90]: A LoRa localization algorithm based on TDoA was proposed, incorporating a Kalman filter to optimize localization accuracy in both indoor and outdoor scenarios. NS-3 simulations verified that this algorithm significantly improves localization accuracy and reduces error fluctuations.
RSSI:
RSSI Trilateration Localization (RTL) [91]: Based on the RSSI localization method of LoRa networks, experimental analysis of 25,000 RSSI samples showed that the trilateration algorithm achieved an average positioning accuracy of 5.5 m indoors; outdoors, LoRa Mode 1 had the best accuracy with 111 m. Although the localization accuracy was high under specific conditions, overall reliability still has room for improvement.
Enhanced Slope-Adaptive (ESA) [92]: A grid search algorithm based on weighted least squares (ESA) was proposed, optimizing the multi-slope path loss model, and simulation and experimental verification achieved a localization accuracy of 5 m, significantly outperforming traditional single-slope assumption algorithms.
Advanced RSSI Localization (ARL) [93]: Six RSSI-based LoRa localization algorithms were studied, aiming to reduce the impact of non-Gaussian noise on large-scale indoor and outdoor localization. The simulation and experiment results demonstrated that the proposed algorithms exhibited superior performance in terms of localization error and computational complexity compared to traditional linear least squares localization algorithms. In certain instances, the proposed algorithms demonstrated performance comparable to GPS.
Bayesian RSSI Characterization (BRC) [94]: LoRa signals in the CN470 MHz band were characterized for the first time, and an RSSI-based indoor-outdoor localization method was developed. Experimental results showed that LoRa exhibited an RMSE of about 26–28 m in both indoor and outdoor localization.
Enhanced Gaussian Process Localization (EGPL) [95]: The enhanced Gaussian process (EGPL) algorithm was used to achieve localization in indoor and outdoor environments via LPWAN. This method optimized MLE using pseudo-RSSI measurements and parameter models. Field tests showed a 2D RMSE of 20 to 30 m, improving accuracy by 30% to 40% compared to traditional methods.
4.3.2 Non-Ranging Based Localization
AoA:
Seirios Multi-Channel AoA Localization (SMAL) [96]: The Seirios system, based on LoRaWAN technology, combines AoA localization with an improved ESPRIT algorithm, significantly enhancing the localization accuracy of indoor and outdoor IoT devices. Through multi-channel synchronization and signal processing optimization, the system achieved a median localization error of 4.4 m outdoors and 2.4 m indoors, marking a significant improvement over traditional methods.
LoBaCa Backscatter Localization (LBL) [97]: The LoBaCa system uses frequency hopping technology and phase slope synchronization, along with upper and lower sideband signals to improve the SNR, effectively addressing multipath effects and tag instability in LoRa backscatter signals. Using the ESPRIT algorithm for super-resolution AoA estimation, indoor and outdoor experiments showed localization errors as low as 5 cm indoors and 71 cm outdoors.
Fingerprint Localization:
Deep Learning Fingerprint Localization (DLFL) [98]: LoRa signals combined with deep learning models (including ANN, LSTM, and CNN) were used for indoor and outdoor localization. Localization accuracy was significantly improved through hyperparameter tuning. Experimental results showed that the average indoor localization error was between 1.2 and 2 m, while the average outdoor localization error was 191.52 m.
4.3.3 Multi-Data Fusion for Localization
Multi-Sensor Fusion Secure Localization (MSFSL) [99]: A LoRa-based IoT security localization system was proposed using multi-sensor fusion computing methods (including temperature, humidity, infrared sensor data, and RSSI) for node localization. The system’s resistance to attacks was significantly enhanced through intelligent optimization and anomaly diagnosis with the SIBMSFCL algorithm. Experimental results showed that the system achieved high localization accuracy and improved reliability by 45% in indoor and outdoor tests, verifying its potential application in national security monitoring systems.
4.3.4 LoRa-Assisted Localization
UWB-Assisted LoRa Localization (UAL) [100]: A UWB-LoRa multi-standard antenna structure was designed, achieving high-precision localization through UWB while using LoRa to transmit data to remote gateways. The system demonstrated sub-meter localization accuracy and a transmission range of hundreds of meters in both indoor and outdoor tests, addressing the limitations of traditional LoRa localization.
Significant advancements have been achieved in indoor-outdoor hybrid localization technologies using range-based and range-free methods. RSSI and AoA localization techniques have demonstrated outstanding performance in both indoor and outdoor settings. Additionally, multi-sensor fusion and UWB-assisted LoRa localization systems have overcome the traditional limitations of individual technologies, thereby broadening their range of applications. These innovations enhance localization accuracy in IoT environments and offer robust technical support for critical areas such as national security monitoring.
5 Practical Applications of LoRa Localization Technology
LoRa technology has demonstrated great potential and adaptability in various applications through its unique low power consumption and long-range communication capabilities. This section explores in detail the practical applications of LoRa and its far-reaching impact in smart cities, agricultural monitoring, logistics and supply chain management, environmental monitoring, and search and rescue.
The development of smart cities depends on integrating and optimizing various technologies, and LoRa technology is being actively explored for its application potential in this context. Strzoda et al. [101] demonstrated that large-scale LoRa networks can effectively collect location data when deployed in city-wide telemetry systems. However, their study also highlighted challenges such as signal attenuation and localization errors in real-world urban environments. Analyzing a large dataset with thousands of devices, they found that LoRa localization accuracy is significantly impacted in urban settings, especially under non-line-of-sight conditions, with potential errors reaching hundreds of meters.
LoRa technology has also proven valuable in traffic management for smart cities. Tumuhairwe et al. [102] developed a LoRa-based real-time bus localization system that employs geometric methods and Global System for Mobile Communications (GSM) for data transmission, offering a low-cost and efficient solution for bus tracking. While the system faces challenges related to accuracy and synchronization, it clearly enhances the efficiency of urban public transportation management. Shi et al. [103] proposed a smart city campus bus localization system that uses a single base station and deep learning algorithms to achieve effective localization without additional hardware, presenting a cost-effective approach to smart transportation.
In indoor localization, LoRa technology also shows considerable promise. Manzoni et al. [104] developed a vehicle localization method for underground parking lots and fleet management using LoRaWAN technology. Their multilateral method achieves localization accuracy within 20–30 m, providing an economical and efficient solution for intelligent transportation systems in smart cities.
Furthermore, LoRa technology is being applied to safety monitoring for specific populations. Rosmiati et al. [105] designed a child localization system using LoRa modules that enables real-time location monitoring up to 2 km without network connectivity, thereby enhancing parental control over child safety. Hamzah et al. [106] developed the iLocation system, which uses LoRa technology for real-time monitoring of the elderly. Applying the Scrum agile methodology, the system was optimized for low power consumption and user-friendliness, offering a reliable safety solution.
Overall, the application of LoRa technology in smart city localization showcases its versatility and innovative potential. From public transportation management to indoor localization and safety monitoring for vulnerable populations, LoRa technology provides robust technical support and diverse application scenarios, contributing to more intelligent and efficient urban management systems.
LoRa technology offers significant potential in agricultural monitoring. Its low power consumption and wide coverage capabilities support automation and intelligence in agriculture.
Shamshiri et al. [107] integrated LoRa networks with digital twin technology to enable remote monitoring and localization of agricultural robots in unstructured farm environments. Their system effectively transmits data over distances ranging from 300 to 3000 m, with a packet loss rate of just 12% at 2300 m, providing a robust solution for remote operations in agricultural automation.
In livestock management, Dieng et al. [108] developed a localization scheme based on RSSI using LoRa networks. This approach minimizes the need for GPS collars and enhances the accuracy of non-GPS collars. By dynamically adjusting the RSSI-distance mapping, this scheme significantly reduces the cost of livestock monitoring while improving localization accuracy, demonstrating both efficiency and cost-effectiveness in large rural areas.
For orchard monitoring, Yang et al. [109] proposed the OrchLoc system, which utilizes a single LoRa gateway to achieve precise localization within orchards. By employing CSI fingerprinting technology, the system significantly enhances tree-level localization accuracy, optimizes agricultural robot navigation, reduces the need for manual intervention, and lowers operational costs. In this context, Islam et al. [110] similarly employed a single mobile LoRa gateway for agricultural localization using RSSI signal processing for efficient localization in remote areas. This mobile gateway solution demonstrates greater flexibility and economy compared to the traditional multi-gateway fixed architecture.
Additionally, Swain et al. [111] demonstrated the feasibility of real-time monitoring in Agriculture 4.0 using a customized LoRa IoT test platform. By optimizing LoRa parameters and enhancing the link budget, the system effectively transmitted agricultural data to cloud servers, significantly improving monitoring accuracy. This provides a strong foundation for the digital transformation of agriculture.
Overall, the application of LoRa technology in agricultural monitoring illustrates its considerable potential and adaptability for various tasks such as remote localization, livestock theft prevention, orchard robot navigation, and real-time agricultural data monitoring. These studies offer new insights and technical approaches for the future development of intelligent agriculture.
5.3 Logistics and Supply Chain Management
The application of LoRa technology in logistics and supply chain management is transforming industry standards, particularly in resource tracking and real-time localization, where its unique advantages are becoming increasingly evident. Teizer et al. [112] demonstrated that when applied to construction sites, LoRa technology achieves high-precision localization, with an accuracy of up to 2.3 m, and ensures stable, long-distance data transmission with low power consumption. This integration of capabilities provides more efficient and precise solutions for supply chain management, facilitating the shift from traditional logistics systems to more intelligent and digital operations. This innovative use of LoRa technology showcases its ability to outperform traditional methods in complex environments, setting a new direction for the future of supply chain management models.
5.4 Environmental Monitoring and Disaster Relief
LoRa technology, with its low power consumption and long-range transmission capabilities, has shown significant advantages in environmental monitoring and search and rescue operations. Baghel et al. [113] developed the TEMPSENSE system, which utilizes LoRa technology to monitor water quality parameters such as Total Dissolved Solids (TDS), Electrical Conductivity (EC), temperature, and pH levels in real time. The system achieves precise localization using an RSSI algorithm with an overall error of less than 10%, offering a reliable and cost-effective solution for efficient environmental monitoring. In the field of forest fire monitoring, Mackey et al. [114] showed that LoRa technology can achieve high-precision localization in the range of 9 to 20 m, which can effectively improve the monitoring efficiency and response speed even in areas without GPS signal coverage.
LoRa technology also shows strong potential in search and rescue missions. Bouras et al. [115] proposed a LoRaWAN-based TDoA multilateral system that maintains localization errors within 15 m through real-time tracking, significantly enhancing search and rescue efficiency. Zhang et al. [116] developed the LoRaAid system, which uses RSSI signal processing to achieve decimeter-level localization accuracy within a 7-m range, making it particularly effective for underground rescue operations. Similarly, Bianco et al. [117] applied LoRa technology in mountain search and rescue scenarios, optimizing localization algorithms through path loss measurements and expanding the communication range fivefold compared to traditional technologies, achieving meter-level accuracy.
Furthermore, Abboud et al. [118] combined LoRa with neural networks, optimizing distance estimation within a range of 0 to 120 m and reducing the average error to less than 5%, which is a 78% improvement in accuracy compared to using RSSI alone. Xie et al. [119] further enhanced localization for indoor fire rescue operations by integrating LPWAN with iBeacon technology, achieving localization accuracy between 1 and 5 m, thereby significantly improving both the speed and accuracy of rescue efforts. Tamali et al. [120] conducted a performance comparison between Wi-Fi, Bluetooth, ZigBee, and LoRa in a multi-robot system, with a special emphasis on LoRa’s robustness in harsh environments and its low energy consumption advantage, where its lower data rate limits throughput but improves signal stability and noise immunity, making it the preferred technology to tackle complex tasks.
These studies demonstrate that LoRa technology offers versatile solutions across various applications, from environmental monitoring to search and rescue in challenging terrains. Its ability to provide low-power, high-precision localization makes it a valuable tool in both fields, highlighting its potential for future development and deployment.
After an in-depth analysis of existing localization methods, this section focuses on identifying the limitations of the current technology and looking at future research directions for further development of LoRa localization technology.
6.1 Analysis of Positioning Methods
LoRa technology provides diverse options in indoor and outdoor localization, enabling its flexible application in IoT projects based on specific needs and environmental conditions. In outdoor environments, ToA and TDoA methods are favored for their high accuracy, ideally up to meter-level positioning accuracy [30]. However, the high time synchronization requirement of the ToA method is susceptible to interference from multipath effects in dense urban environments, whereas TDoA does not require global time synchronization, but the accuracy of inter-base station synchronization is still high, which affects the stability in dynamic environments.
RSSI is widely used in indoor and outdoor areas, such as logistics centers and farms, due to its low cost and ease of large-scale application. However, its positioning accuracy is susceptible to environmental changes, obstacles, and signal reflections. Recent research has dramatically improved its localization capability in complex environments by combining filtering algorithms and machine learning models to enhance the response to dynamic signal changes.
The AoA approach excels in indoor scenarios, where high accuracy is required, by measuring the angle of signal incidence to achieve high-precision localization in controlled environments, such as smart buildings. However, its expensive infrastructure and complex antenna installation limit its popularity. It is more suitable for small-scale, high-value applications.
Fingerprint localization achieves high accuracy by leveraging signal feature databases, with its dynamic feature update capability significantly enhanced when integrated with deep learning. This method is widely used in indoor environments with small location changes, such as shopping malls and exhibition halls. However, the cost of building and maintaining a fingerprint database is high.
Hybrid positioning techniques overcome the shortcomings of a single method by integrating multiple positioning methods, such as ToF and RSSI [55], to provide more stable and flexible positioning services. These methods show great application potential in complex and changing environments but require the support of enhanced processor capabilities and complex algorithms.
Choosing the right LoRa positioning technology requires fully weighing the environmental characteristics, accuracy requirements, and budget to maximize the value of the technology.
6.2 Future Research Directions
Multi-data fusion is a key direction for improving the accuracy and robustness of LoRa localization. Fusing multiple heterogeneous data sources can provide more comprehensive and accurate localization information. Future research can explore combining more environment-aware data (e.g., temperature, humidity, and visual information) with location data and using machine learning algorithms for intelligent processing. This will enhance the adaptability of localization systems in complex environments, especially in urban environments with severe signal multipath propagation or scenarios with frequent dynamic changes.
The limitations of single algorithms drive the exploration of multi-algorithm fusion. This fusion can flexibly cope with multiple environmental changes, especially in mixed indoor and outdoor conditions. By integrating different positioning techniques such as RSSI, TDoA, and AoA, future research should be devoted to mining common features and developing intelligent combination strategies to improve system fault tolerance and adaptability and achieve stable and highly available positioning services.
Deep learning and neural networks show great potential in optimizing LoRa positioning algorithms. With models such as convolutional neural networks and long-short-term memory networks (LSTM), features can be extracted from large network data, enabling dynamic learning and self-adjustment of environmental interferences on positioning accuracy. Future research should focus on improving the interpretability and real-time performance of the models to cope with the rapid changes in the environment of IoT devices.
To address the challenges of indoor and outdoor localization, building a dual localization algorithm network architecture that supports seamless switching will be a hot research topic in the future. This architecture can intelligently determine and switch the optimal localization algorithm to ensure high performance is always maintained indoors and outdoors. Low-power and low-latency network protocols should also be explored to enhance the energy efficiency and scalability of LoRa networks, providing a solid foundation for dealing with complex and dynamic IoT applications.
Future research on LoRa positioning will seek new breakthroughs based on technology cross-fertilization, thus promoting the widespread application of IoT in smart cities, smart logistics, and autonomous driving. Through in-depth integration of emerging technologies and optimization of existing system architectures, LoRa positioning technology will become an indispensable and important driving force in the wave of global informatization.
This paper reviews the application and development of LoRa positioning technology in the IoT, focusing on its features such as low power consumption, long-range transmission, and anti-interference capability, and demonstrates the unique advantages of LoRa as a positioning technology in complex environments. By analyzing different positioning methods such as ToA, TDoA, and RSSI, it is pointed out that LoRa technology performs well in several areas such as smart cities, agricultural monitoring, and logistics management, especially in terms of its obvious competitiveness in terms of low power consumption, large-scale deployment, and long-term operation. However, although LoRa shows great potential for positioning accuracy, cost control, and network efficiency, it still faces challenges such as accuracy improvement, dynamic environmental adaptation, and latency. Future research should focus on developing multi-data fusion techniques to improve system robustness and accuracy by combining machine learning and artificial intelligence to optimize existing positioning models. Meanwhile, the development of a flexible indoor-outdoor seamless positioning architecture and a low-power, high-real-time network protocol will be the key way to promote the wider application of LoRa technology. With the continuous expansion of IoT application scenarios, LoRa technology will play an important and indispensable role in promoting the development of a smart society and become the core driving force to achieve accurate, efficient, and scalable positioning services.
Acknowledgement: The authors would like to thank the School of Mechanical and Electrical Engineering and the Institute of AI at Shaoxing University for providing support and resources. We also thank the reviewers for their helpful suggestions, which effectively improved the presentation of this paper.
Funding Statement: This work was supported by the Natural Science Foundation of Zhejiang Province under grant no. LGF22F010006, and the Humanities and Social Science Research Project of Ministry of Education of China under grant no. 22YJAZH016.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Huajiang Ruan, Zhaoxi Fang; data collection: Panjun Sun, Yuanyuan Dong; analysis and interpretation of results: Huajiang Ruan, Zhaoxi Fang, Hamid Tahaei; draft manuscript preparation: Huajiang Ruan. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. R. S. Cabrera, A. Pachon, and J. M. Madrid, “Proof of concept of an IoT-based public vehicle tracking system, using LoRa (long range) and intelligent transportation system (ITS) services,” J. Comput. Netw. Commun., vol. 19, pp. 1–10, 2019. doi: 10.1155/2019/9198157. [Google Scholar] [CrossRef]
2. M. Musayyanah, P. Kristalina, Y. Triwidayastuti, P. Susanto, and M. Z. Hadi, “Distributed localization using normalized quad lateration in LoRa networks: Application for tourist position estimation,” Indones. J. Electr. Eng. Comput. Sci., vol. 29, no. 3, pp. 1446–1455, 2023. doi: 10.11591/ijeecs.v29.i3.pp1446-1455. [Google Scholar] [CrossRef]
3. S. J. Ganesh, K. Dhivya, V. Kannagi, M. Rajkumar, and N. Suriya, “LoRa assisted intelligent troop tracking and location monitoring system over defense environment,” in 2022 6th Int. Conf. Comput. Methodol. Commun. (ICCMC), Madrid, Spain, Oct. 13–16, 2020, pp. 288–294. doi: 10.1109/ICCMC53470.2022.9754026. [Google Scholar] [CrossRef]
4. L. Bornholdt, S. Kaven, and V. Skwarek, “Adaptive procedure for indoor localization using LoRa devices,” in 2021 Int. Conf. Indoor Position. Indoor Navigat. (IPIN), Lloret de Mar, Spain, Nov. 29–Dec. 02, 2021, pp. 1–8. doi: 10.1109/IPIN51156.2021.9662624. [Google Scholar] [CrossRef]
5. A. Lazaro, M. Lazaro, and R. Villarino, “Room-level localization system based on LoRa backscatters,” IEEE Access, vol. 9, pp. 16004–16018, 2021. doi: 10.1109/ACCESS.2021.3053144. [Google Scholar] [CrossRef]
6. R. Fernandes, M. Luís, and S. Sargento, “Large-scale LoRa networks: A mode adaptive protocol,” IEEE Internet Things J., vol. 8, no. 17, pp. 13487–13502, 2021. doi: 10.1109/JIOT.2021.3064932. [Google Scholar] [CrossRef]
7. L. E. Marquez and M. Calle, “Understanding LoRa-based localization: Foundations and challenges,” IEEE Internet Things J., vol. 10, no. 13, pp. 11185–11198, 2023. doi: 10.1109/JIOT.2023.3248860. [Google Scholar] [CrossRef]
8. M. Alipio and M. Bures, “Current testing and performance evaluation methodologies of LoRa and LoRaWAN in IoT applications: Classification, issues, and future directives,” Internet Things, 2023, Art. no. 101053. doi: 10.1016/j.iot.2023.101053. [Google Scholar] [CrossRef]
9. C. Gu, L. Jiang, and R. Tan, “Lora-based localization: Opportunities and challenges,” 2018. doi: 10.48550/arXiv.1812.11481. [Google Scholar] [CrossRef]
10. R. Henriksson, “Indoor positioning in LoRaWAN networks,” 2016. Accessed: Dec. 03, 2024. [Online]. Available: https://publications.lib.chalmers.se/records/fulltext/241190/241190 [Google Scholar]
11. K. Solmann, R. Loffredo, and S. Tomasiello, “Using fuzzy transforms for neural networks-based wireless localization in outdoor environments,” Neural Comput. Appl., vol. 36, pp. 20027–20041, 2024. doi: 10.1007/s00521-024-10250-x. [Google Scholar] [CrossRef]
12. T. Janssen, M. Weyn, and R. Berkvens, “A primer on real-world RSS-based outdoor NB-IoT localization,” in 2020 Int. Conf. Localizat. GNSS (ICL-GNSS), Tampere, Finland, Jun. 02–04, 2020, pp. 1–6. doi: 10.1109/ICL-GNSS49876.2020.9115578. [Google Scholar] [CrossRef]
13. P. Müller, H. Stoll, L. Sarperi, and C. Schüpbach, “Outdoor ranging and positioning based on LoRa modulation,” in 2021 Int. Conf. Localizat. GNSS (ICL-GNSS), Tampere, Finland, Jun. 01–03, 2021, pp. 1–6. doi: 10.1109/ICL-GNSS51451.2021.9452277. [Google Scholar] [CrossRef]
14. I. Bobkov, A. Rolich, M. Denisova, and L. Voskov, “Study of LoRa performance at 433 MHz and 868 MHz bands inside a multistory building,” in 2020 Moscow Works. Electr. Netw. Technol. (MWENT), Moscow, Russia, Mar. 11–13, 2020, pp. 1–6. doi: 10.1109/MWENT47943.2020.9067427. [Google Scholar] [CrossRef]
15. C. Rus, M. Leba, R. Marcuş, L. Pellegrini, and A. Costandoiu, “LoRa communication and geolocation system for sensors network,” MATEC Web Conf., vol. 305, 2020, Art. no. 43. doi: 10.1051/matecconf/202030500043. [Google Scholar] [CrossRef]
16. P. Gkotsiopoulos, D. Zorbas, and C. Douligeris, “Performance determinants in LoRa networks: A literature review,” IEEE Commun. Surv. Tut., vol. 23, no. 3, pp. 1721–1758, 2021. doi: 10.1109/COMST.2021.3090409. [Google Scholar] [CrossRef]
17. G. Kaur, S. Hak Gupta, and H. Kaur, “An approach to optimize LoRa network performance for efficient IoT applications,” Wirel. Pers. Commun., vol. 128, no. 1, pp. 209–229, 2023. doi: 10.1007/s11277-022-09950-1. [Google Scholar] [CrossRef]
18. D. Mu, Y. Chen, J. Shi, and M. Sha, “Runtime control of LoRa spreading factor for campus shuttle monitoring,” in 2020 IEEE 28th Int. Conf. Netw. Protoc. (ICNP), Madrid, Spain, Oct. 13–16, 2020, pp. 1–11. doi: 10.1109/ICNP49622.2020.9259383. [Google Scholar] [CrossRef]
19. A. Abubakar, T. Shore, and N. Sastry, “Constrained machine learning for LoRa gateway location optimisation,” in Proc. 17th Asian Inte. Eng. Conf., Hiroshima, Japan, Dec. 19–21, 2022, pp. 10–17. doi: 10.1145/3570748.3570751. [Google Scholar] [CrossRef]
20. B. Li, Y. Xu, Y. Liu, and Z. Shi, “LoRaWAPS: A wide-area positioning system based on LoRa mesh,” Appl. Sci., vol. 13, no. 17, 2023, Art. no. 9501. doi: 10.3390/app13179501. [Google Scholar] [CrossRef]
21. Z. Shi, C. Gu, S. He, and K. Hu, “Wide-area localization system based on LoRa mesh,” in LoRa Localization. Cham: Springer, 2024, pp. 41–58. doi: 10.1007/978-3-031-48008-9_4. [Google Scholar] [CrossRef]
22. S. Kaven, L. Bornholdt, and V. Skwarek, “Authentication by RSSI-position based localization in a LoRa LPWAN,” in 2020 6th IEEE Cong. Inform. Sci. Technol. (CiSt), Agadir–Essaouira, Morocco, Jun. 05–12, 2021, pp. 448–454. doi: 10.1109/CiSt49399.2021.9357283. [Google Scholar] [CrossRef]
23. R. Muppala, “Feasibility of GNSS-free localization: A TDoA-based approach using LoRaWAN,” 2021. doi: 10.48550/arXiv.2107.14494. [Google Scholar] [CrossRef]
24. Q. Liu, X. Bai, X. Gan, and S. Yang, “LoRa RTT ranging characterization and indoor positioning system,” Wirel. Commun. Mob. Comput., vol. 2021, no. 1, 2021, Art. no. 5529329. doi: 10.1155/2021/5529329. [Google Scholar] [CrossRef]
25. K. -J. Baik, S. Lee, and B. -J. Jang, “Hybrid RSSI-AoA positioning system with single time-modulated array receiver for LoRa IoT,” in 2018 48th Eur. Microwave Conf. (EuMC), Madrid, Spain, Sep. 23–27, 2018, pp. 1133–1136. doi: 10.23919/EuMC.2018.8541736. [Google Scholar] [CrossRef]
26. M. Aernouts, N. BniLam, R. Berkvens, and M. Weyn, “Simulating a combination of TDoA and AoA localization for LoRaWAN,” in Advances on P2P, Parallel, Grid, Cloud and Internet Computing. Cham: Springer, Nov. 7–9, 2019, pp. 756–765. doi: 10.1007/978-3-030-33509-0_71. [Google Scholar] [CrossRef]
27. W. Choi, Y. -S. Chang, Y. Jung, and J. Song, “Low-power LoRa signal-based outdoor positioning using fingerprint algorithm,” ISPRS Int. J. Geo Inf., vol. 7, no. 11, 2018, Art. no. 440. doi: 10.3390/ijgi7110440. [Google Scholar] [CrossRef]
28. F. Carrino, A. Janka, O. Abou Khaled, and E. Mugellini, “LoRaLoc: Machine learning-based fingerprinting for outdoor geolocation using LoRa,” in 2019 6th Swiss Conf. Data Sci. (SDS), Bern, Switzerland, Jun. 14, 2019, pp. 82–86. doi: 10.1109/SDS.2019.000-2. [Google Scholar] [CrossRef]
29. T. W. Anugrah, A. Rakhmatsyah, and A. Arif Wardana, “Non-line of sight LoRa-based localization using RSSI-Kalman-filter and trilateration,” Int. J. Inform. Commun. Technol., vol. 6, no. 2, pp. 52–63, 2020. doi: 10.21108/IJOICT.2020.00.495. [Google Scholar] [CrossRef]
30. A. Bansal, A. Gadre, V. Singh, A. Rowe, B. Iannucci and S. Kumar, “OwLL: Accurate LoRa localization using the TV whitespaces,” in Proc. 20th Int. Conf. Inform. Process. Sensor Netw., Nashville, TN, USA, May 18–21, 2021, pp. 148–162. doi: 10.1145/3412382.3458263. [Google Scholar] [CrossRef]
31. P. Savazzi, E. Goldoni, A. Vizziello, L. Favalli, and P. Gamba, “A Wiener-based RSSI localization algorithm exploiting modulation diversity in LoRa networks,” IEEE Sens. J., vol. 19, no. 24, pp. 12381–12388, 2019. doi: 10.1109/JSEN.2019.2936764. [Google Scholar] [CrossRef]
32. S. Khriji, M. Kavali, and O. Kanoun, “A hybrid filter for accurate RSSI-based LoRa distance estimation systems in IoT applications,” in 2024 21st Int. Multi-Conf. Syst. Sig. Dev. (SSD), Erbil, Iraq, Apr. 22–25, 2024, pp. 304–308. doi: 10.1109/SSD61670.2024.10549316. [Google Scholar] [CrossRef]
33. D. J. Hemanth, U. Kose, J. Watada, and B. Pǎtruţ, Smart Applications with Advanced Machine Learning and Human-Centred Problem Design. Cham, Switzerland: Springer, 2023. [Google Scholar]
34. D. Guo, C. Gu, L. Jiang, W. Luo, and R. Tan, “ILLOC: In-hall localization with standard LoRaWAN uplink frames,” Proc. ACM Interact. Mob. Wearable Ubiquitous Technol., vol. 6, no. 1, pp. 1–26, 2022. doi: 10.1145/3517245. [Google Scholar] [CrossRef]
35. M. Dai, “Investigation on Time-of-Arrival estimation for the LoRa Network,” 2019. Accessed: Dec. 03, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:250551026/ [Google Scholar]
36. C. K. Lebekwe, L. Kolobe, B. Sigweni, and A. M. Zungeru, “Assessing repeatable accuracy potential of LoRa: A navigation approach,” IEEE Access, vol. 10, pp. 43943–43953, 2022. doi: 10.1109/ACCESS.2022.3169443. [Google Scholar] [CrossRef]
37. C. Villien, N. Deparis, V. Mannoni, and S. De Rivaz, “Prediction of TOA-based localization accuracy using CRLB and 3D buildings with field trial validation,” in 2022 Joint Eur. Conf. Netw. Commun. 6G Summit (EuCNC/6G Summit), Grenoble, France, Jun. 07–10, 2022, pp. 261–266. doi: 10.1109/EuCNC/6GSummit54941.2022.9815596. [Google Scholar] [CrossRef]
38. N. Podevijn et al., “TDoA-based outdoor positioning with tracking algorithm in a public LoRa network,” Wirel. Commun. Mob. Comput., vol. 2018, 2018, Art. no. 1864209. doi: 10.1155/2018/1864209. [Google Scholar] [CrossRef]
39. D. Plets, N. Podevijn, J. Trogh, L. Martens, and W. Joseph, “Experimental performance evaluation of outdoor TDoA and RSS positioning in a public LoRa network,” in 2018 Int. Conf. Indoor Position. Indoor Navigat. (IPIN), Nantes, France, Sep. 24–27, 2018, pp. 1–8. doi: 10.1109/IPIN.2018.8533761. [Google Scholar] [CrossRef]
40. I. Daramouskas, D. Mitroulias, I. Perikos, M. Paraskevas, and V. Kapoulas, “Localization in LoRa networks based on time difference of arrival,” in Computer and Information Science 2021–Fall. Cham: Springer, 2022, pp. 130–143. doi: 10.1007/978-3-030-90528-6_12. [Google Scholar] [CrossRef]
41. J. Cho, D. Hwang, and K. -H. Kim, “Improving TDoA based positioning accuracy using machine learning in a LoRaWAN environment,” in 2019 Int. Conf. Inform. Netw. (ICOIN), Kuala Lumpur, Malaysia, Jan. 09–11, 2019, pp. 469–472. doi: 10.1109/ICOIN.2019.8718160. [Google Scholar] [CrossRef]
42. A. Vazquez-Rodas, F. Astudillo-Salinas, C. Sanchez, B. Arpi, and L. I. Minchala, “Experimental evaluation of RSSI-based positioning system with low-cost LoRa devices,” Ad Hoc Netw., vol. 105, 2020, Art. no. 102168. doi: 10.1016/j.adhoc.2020.102168. [Google Scholar] [CrossRef]
43. C. Sanchez, B. Arpi, A. Vazquez-Rodas, F. Astudillo-Salinas, and L. I. Minchala, “Performance evaluation of RSSI-based positioning system with low-cost LoRa devices,” in Proc. 16th ACM Int. Symp. Perform. Evalu. Wirel. Ad Hoc Sen. Ubiquit. Netw., Miami Beach, FL, USA, Nov. 25–29, 2019, pp. 37–44. doi: 10.1145/3345860.3361512. [Google Scholar] [CrossRef]
44. G. P. Telles, O. K. Rayel, and G. L. Moritz, “Weighted-Centroid localization using LoRaWAN network on large outdoor areas,” Int. Technol. Lett., vol. 5, no. 4, 2022, Art. no. e367. doi: 10.1002/itl2.367. [Google Scholar] [CrossRef]
45. W. Ingabire, H. Larijani, R. M. Gibson, and A. -U. -H. Qureshi, “Outdoor node localization using random neural networks for large-scale urban IoT LoRa networks,” Algorithms, vol. 14, no. 11, 2021, Art. no. 307. doi: 10.3390/a14110307. [Google Scholar] [CrossRef]
46. A. Moradbeikie, A. Keshavarz, H. Rostami, S. Paiva, and S. I. Lopes, “Improvement of RSSI-based LoRaWAN localization using edge-AI,” in Science and Technologies for Smart Cities. Cham: Springer, 2021, pp. 140–154. doi: 10.1007/978-3-031-06371-8_10. [Google Scholar] [CrossRef]
47. H. Chen et al., “A lightweight mobile-anchor-based multi-target outdoor localization scheme using LoRa communication,” IEEE Trans. Green Commun. Netw., vol. 7, no. 4, pp. 1607–1619, 2023. doi: 10.1109/TGCN.2023.3236630. [Google Scholar] [CrossRef]
48. K. Sri Rustamaji and W. Widada, “The angle of arrival estimation of frequency-hopping cooperative object based on software-defined radio,” Sci. Rep., vol. 14, no. 1, 2024, Art. no. 7732. doi: 10.1038/s41598-024-58488-8. [Google Scholar] [PubMed] [CrossRef]
49. O. H. Al-Eidani, A. H. Al-Nakkash, and O. A. Hussein, “LoRa in a campus: Outdoor localization based on fingerprint using KNN,” AIP Conf. Proc., vol. 2804, no. 1, 2023. doi: 10.1063/5.0154283. [Google Scholar] [CrossRef]
50. T. A. Nguyen, LoRa Localisation in Cities with Neural Networks. Delft, The Netherlands: Delft University of Technology, 2019, vol. 71. [Google Scholar]
51. M. Anjum, M. A. Khan, S. A. Hassan, H. Jung, and K. Dev, “Analysis of time-weighted LoRa-based positioning using machine learning,” Comput. Commun., vol. 193, no. 7, pp. 266–278, 2022. doi: 10.1016/j.comcom.2022.07.010. [Google Scholar] [CrossRef]
52. J. -L. Chen, H. -Y. Chen, and Y. -W. Ma, “Intelligent LoRa-based positioning system,” KSII Transact. Inter. Inform. Syst., vol. 16, no. 9, 2022. doi: 10.3837/tiis.2022.09.007. [Google Scholar] [CrossRef]
53. M. M. Shah, “RSS based LoRa localization using transfer learning,” 2021. Accessed: Dec. 03, 2024. [Online]. Available: https://hdl.handle.net/10211.3/218646/ [Google Scholar]
54. Y. Lin, W. Dong, Y. Gao, and T. Gu, “SateLoc: A virtual fingerprinting approach to outdoor LoRa localization using satellite images,” ACM Trans. Sen. Netw., vol. 17, no. 4, pp. 1–28, 2021. doi: 10.1145/3461012. [Google Scholar] [CrossRef]
55. J. Danebjer and V. Halldórsson, “A hybrid approach to GPS-free geolocation over LoRa,” 2018. Accessed: Dec. 03, 2024. [Online]. Available: http://lup.lub.lu.se/student-papers/record/8962876/ [Google Scholar]
56. Z. A. Pandangan and M. C. R. Talampas, “Hybrid LoRaWAN localization using ensemble learning,” in 2020 Global Inter. Things Summit (GIoTS), Dublin, Ireland, Jun. 03, 2020, pp. 1–6. doi: 10.1109/GIOTS49054.2020.9119520. [Google Scholar] [CrossRef]
57. A. A. ElSabaa, M. Ward, and W. Wu, “Hybrid localization techniques in LoRa-based WSN,” in 2019 25th Int. Conf. Automat. Comput. (ICAC), Lancaster, UK, Sep. 05–07, 2019, pp. 1–5. doi: 10.23919/IConAC.2019.8895196. [Google Scholar] [CrossRef]
58. G. A. S. Ferreras and M. C. R. Talampas, “LoRa-based differential fingerprint localization in outdoor environments,” in 2021 IEEE 7th World For. Inter. Thin. (WF-IoT), New Orleans, LA, USA, Jun. 14, 2021, pp. 710–715. doi: 10.1109/WF-IoT51360.2021.9595880. [Google Scholar] [CrossRef]
59. R. Ramly, Y. A. Wahid, S. M. Salleh, and M. A. Zaaba, “Location based tracking system for prison transport using LoRa,” AIP Conf. Proc., vol. 2808, no. 1, 2023. doi: 10.1063/5.0133776. [Google Scholar] [CrossRef]
60. J. Gauld, P. W. Atkinson, J. P. Silva, A. Senn, and A. M. A. Franco, “Characterisation of a new lightweight LoRaWAN GPS bio-logger and deployment on griffon vultures Gyps fulvus,” Anim. Biotelem., vol. 11, no. 1, 2023, Art. no. 17. doi: 10.1186/s40317-023-00329-y. [Google Scholar] [CrossRef]
61. X. Ni, “Balise auxiliary positioning system based on LoRa,” Electric Measur. Technol., vol. 46, no. 18, pp. 179–185, 2024. [Google Scholar]
62. T. D. Pham, N. Q. Tran, and T. N. Le, “Indoor localization simulation based on LoRa ranging,” in Int. Conf. Intelli. Things, Hanoi, Vietnam, Aug. 17–19, 2022, pp. 204–214. doi: 10.1007/978-3-031-15063-0_19. [Google Scholar] [CrossRef]
63. W. Wang, Y. Zhang, and L. Tian, “TOA-based NLOS error mitigation algorithm for 3D indoor localization,” China Commun., vol. 17, no. 1, pp. 63–72, 2020. doi: 10.23919/JCC.2020.01.005. [Google Scholar] [CrossRef]
64. S. Kavetha, A. S. Ja’afar, M. Z. A. Aziz, A. A. M. Isa, M. S. Johal and N. M. Z. Hashim, “Development of location estimation algorithm utilizing RSSI for LoRa positioning system,” J. Teknol., vol. 84, no. 1, pp. 97–105, 2022. doi: 10.11113/jurnalteknologi.v84.17153. [Google Scholar] [CrossRef]
65. F. U. Khan, A. N. Mian, and M. T. Mushtaq, “Experimental testbed evaluation of cell level indoor localization algorithm using Wi-Fi and LoRa protocols,” Ad Hoc Netw., vol. 125, 2022, Art. no. 102732. doi: 10.1016/j.adhoc.2021.102732. [Google Scholar] [CrossRef]
66. T. Perković, L. Dujić Rodić, J. Šabić, and P. Šolić, “Machine learning approach towards LoRaWAN indoor localization,” Electronics, vol. 12, no. 2, 2023, Art. no. 457. doi: 10.3390/electronics12020457. [Google Scholar] [CrossRef]
67. X. Jin, X. Xie, K. An, Q. Wang, and J. Guo, “LoRa indoor localization based on improved neural network for firefighting robot,” in Int. Conf. Neural Inform. Process., Sydney, NSW, Australia, Dec. 12–15, 2019, pp. 355–362. doi: 10.1007/978-3-030-36802-9_38. [Google Scholar] [CrossRef]
68. K. Lu, Y. Yue, and J. Ma, “Enhanced LoRaWAN RSSI indoor localization based on BP neural network,” in 2021 IEEE 4th Int. Conf. Inform. Syst. Comput. Aid. Edu. (ICISCAE), Dalian, China, Sep. 24–26, 2021, pp. 190–195. doi: 10.1109/ICISCAE52414.2021.9590790. [Google Scholar] [CrossRef]
69. J. A. Micheletti and E. P. Godoy, “Improved indoor 3D localization using LoRa wireless communication,” IEEE Lat. Am. Trans., vol. 20, no. 3, pp. 481–487, 2021. doi: 10.1109/TLA.2022.9667147. [Google Scholar] [CrossRef]
70. K. Ibwe, S. Pande, A. T. Abdalla, and G. M. Gadiel, “Indoor positioning using circle expansion-based adaptive trilateration algorithm,” J. Electr. Sys. Inform. Technol., vol. 10, no. 1, 2023, Art. no. 10. doi: 10.1186/s43067-023-00075-4. [Google Scholar] [CrossRef]
71. Z. Hussein, S. Francois, B. Oumaya, and V. Thierry, “SYLOIN: Measuring angle of arrival of LoRa signals using software defined radio,” in 2021 Int. Conf. Indoor Position. Indoor Navigat. (IPIN), Lloret de Mar, Spain, Nov. 29–Dec. 02, 2021, pp. 1–8. doi: 10.1109/IPIN51156.2021.9662518. [Google Scholar] [CrossRef]
72. N. BniLam, S. Nasser, and M. Weyn, “Angle of arrival estimation system for LoRa technology based on phase detectors,” in 2022 16th Eur. Conf. Antennas Propagat. (EuCAP), Madrid, Spain, Mar. 27–Apr. 01, 2022, pp. 1–5. doi: 10.23919/EuCAP53622.2022.9769059. [Google Scholar] [CrossRef]
73. Z. Dai, Y. He, V. Tran, N. Trigoni, and A. Markham, “DeepAoANet: Learning angle of arrival from software defined radios with deep neural networks,” IEEE Access, vol. 10, pp. 3164–3176, 2022. doi: 10.1109/ACCESS.2021.3140146. [Google Scholar] [CrossRef]
74. J. Ge, D. Zhu, L. Sun, C. Han, and J. Guo, “A long-range signal-based target localization algorithm,” Electronics, vol. 13, no. 6, 2024, Art. no. 1069. doi: 10.3390/electronics13061069. [Google Scholar] [CrossRef]
75. K. Hu, C. Gu, and J. Chen, “LTrack: A LoRa-based indoor tracking system for mobile robots,” IEEE Trans. Vehicular Technol., vol. 71, no. 4, pp. 4264–4276, 2022. doi: 10.1109/TVT.2022.3143526. [Google Scholar] [CrossRef]
76. D. Chandana, C. Savitha, and M. Z. Kurian, “Design and implementation for indoor navigation system using LoRa,” Int. J. Modern Develop. Eng. Sci., vol. 1, no. 7, pp. 60–64, 2022. [Google Scholar]
77. S. -H. Lee, C. -H. Cheng, K. -H. Lu, Y. -L. Shiue, and Y. -F. Huang, “Performance of differential evolution algorithms for indoor area positioning in wireless sensor networks,” Electronics, vol. 13, no. 4, 2024, Art. no. 705. doi: 10.3390/electronics13040705. [Google Scholar] [CrossRef]
78. M. A. Kamal, M. M. Alam, A. A. Bakar, and M. M. Su’ud, “SNR and RSSI based an optimized machine learning based indoor localization approach: Multistory round building scenario over LoRa network,” Comput. Mater. Contin., vol. 80, no. 2, pp. 1927–1945, 2024. doi: 10.32604/cmc.2024.052169. [Google Scholar] [CrossRef]
79. T. J. Ng, N. Kumar, and M. Othman, “LoRa-based indoor positioning in dynamic industrial environments using deep Gaussian process regression and temporal-based enhancements,” IEEE Access, vol. 12, pp. 165298–165313, 2024. doi: 10.1109/ACCESS.2024.3487901. [Google Scholar] [CrossRef]
80. A. S. Lutakamale, H. C. Myburgh, and A. De Freitas, “RSSI-based fingerprint localization in LoRaWAN networks using CNNs with squeeze and excitation blocks,” Ad Hoc Netw., vol. 159, 2024, Art. no. 103486. doi: 10.1016/j.adhoc.2024.103486. [Google Scholar] [CrossRef]
81. R. Swathika and S. M. D. Kumar, “RSS-based localization using deep learning models with optimizer in LoRaWAN-IoT networks,” in 2024 IEEE Int. Conf. Women Innovat., Technol. Entrepreneur. (ICWITE), Bangalore, India, Feb. 16–17, 2024, pp. 242–246. doi: 10.1109/ICWITE59797.2024.10503403. [Google Scholar] [CrossRef]
82. D. Merhej, I. Ahriz, L. Zerioul, S. Garcia, and M. Terré, “Joint RSS and ranging fingerprint for LoRa indoor localization,” in 2024 IEEE Wireless Commun. Netw. Conf. (WCNC), Dubai, United Arab, Apr. 21–24, 2024, pp. 1–6. doi: 10.1109/WCNC57260.2024.10570742. [Google Scholar] [CrossRef]
83. M. A. Ouameur, M. Caza-Szoka, and D. Massicotte, “Machine learning enabled tools and methods for indoor localization using low power wireless network,” Internet Things, vol. 12, 2020, Art. no. 100300. doi: 10.1016/j.iot.2020.100300. [Google Scholar] [CrossRef]
84. M. Orfanos, H. Perakis, and V. Gikas, “RF-based localization (WiFi RTT/LoRa) in underground quarrying for agent supervision and mapping applications,” Int. Archiv. Photogramm. Remote Sens. Spati. Inform. Sci., vol. 48, pp. 353–361, 2023. doi: 10.5194/isprs-archives-XLVIII-1-W1-2023-353-2023. [Google Scholar] [CrossRef]
85. K. S. J. Abd Shukur Ja’afar, K. Suseenthiran, K. M. Saipullah, M. Z. A. Abd Aziz, A. W. Khang and A. Salleh, “Development of real-time monitoring BLE-LoRa positioning system based on RSSI for non-line-of-sight condition,” Indones. J. Electr. Eng. Comput. Sci., vol. 30, no. 2, pp. 972–981, 2023. doi: 10.11591/ijeecs.v30.i2.pp972-981. [Google Scholar] [CrossRef]
86. K. Suseenthiran et al., “Indoor positioning utilizing Bluetooth low energy RSSI on LoRa system,” Indones. J. Electr. Eng. Comput. Sci., vol. 23, no. 2, pp. 927–937, 2021. doi: 10.11591/ijeecs.v23.i2.pp927-937. [Google Scholar] [CrossRef]
87. P. Kanakaraja et al., “IoT enabled BLE and LoRa based indoor localization without GPS,” Turk. J. Comput. Math. Educ., vol. 12, no. 4, pp. 1637–1651, 2021. doi: 10.17762/turcomat.v12i4.1419. [Google Scholar] [CrossRef]
88. F. Bonafini et al., “Evaluating indoor and outdoor localization services for LoRaWAN in smart city applications,” in 2019 II Works. Metrol. Indus. 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, Jun. 04–06, 2019, pp. 300–305. doi: 10.1109/METROI4.2019.8792901. [Google Scholar] [CrossRef]
89. J. E. Salt, H. H. Nguyen, and N. H. Pham, “Probabilistic source localization based on time-of-arrival measurements,” IEEE Internet Things J., vol. 8, no. 7, pp. 5881–5892, 2020. doi: 10.1109/JIOT.2020.3034342. [Google Scholar] [CrossRef]
90. M. Chen, H. Zhao, C. Shi, X. Chen, and D. Niu, “Multi-scene LoRa positioning algorithm based on Kalman filter and its implementation on NS3,” Ad Hoc Netw., vol. 141, 2023, Art. no. 103097. doi: 10.1016/j.adhoc.2023.103097. [Google Scholar] [CrossRef]
91. E. Goldoni, L. Prando, A. Vizziello, P. Savazzi, and P. Gamba, “Experimental data set analysis of RSSI-based indoor and outdoor localization in LoRa networks,” Inter. Technol. Lett., vol. 2, no. 1, 2019, Art. no. e75. doi: 10.1002/itl2.75. [Google Scholar] [CrossRef]
92. G. M. Bianco, R. Giuliano, F. Mazzenga, and G. Marrocco, “Multi-slope path loss and position estimation with grid search and experimental results,” IEEE Trans. Signal Inf. Process. Netw., vol. 7, pp. 551–561, 2021. doi: 10.1109/TSIPN.2021.3106693. [Google Scholar] [CrossRef]
93. K. -H. Lam, C. -C. Cheung, and W. -C. Lee, “RSSI-based LoRa localization systems for large-scale indoor and outdoor environments,” IEEE Trans. Vehicular Technol., vol. 68, no. 12, pp. 11778–11791, 2019. doi: 10.1109/TVT.2019.2940272. [Google Scholar] [CrossRef]
94. Y. Li, Z. He, Y. Li, H. Xu, L. Pei and Y. Zhang, “Towards location enhanced IoT: Characterization of LoRa signal for wide area localization,” in 2018 Ubiquit. Position. Indoor Navigat. Locat.-Based Serv. (UPINLBS), Wuhan, China, Mar. 22–23, 2018, pp. 1–7. doi: 10.1109/UPINLBS.2018.8559844. [Google Scholar] [CrossRef]
95. Z. He, Y. Li, L. Pei, and K. O’Keefe, “Enhanced Gaussian process-based localization using a low power wide area network,” IEEE Commun. Lett., vol. 23, no. 1, pp. 164–167, 2019. doi: 10.1109/LCOMM.2018.2878704. [Google Scholar] [CrossRef]
96. J. Liu, J. Gao, S. Jha, and W. Hu, “Seirios: Leveraging multiple channels for LoRaWAN indoor and outdoor localization,” in Proc. 27th Annual Int. Conf. Mobile Comput. Netw., New Orleans, LA, USA, Oct. 25–29, 2021, pp. 656–669. doi: 10.1145/3447993.3483256. [Google Scholar] [CrossRef]
97. B. Hou and J. Wang, “LoBaCa: Super-resolution LoRa backscatter localization for low-cost tags,” in IEEE INFOCOM 2024-IEEE Conf. Comput. Commun., Vancouver, BC, Canada, May 20–23, 2024, pp. 1081–1090. doi: 10.1109/INFOCOM52122.2024.10621170. [Google Scholar] [CrossRef]
98. J. Purohit, X. Wang, S. Mao, X. Sun, and C. Yang, “Fingerprinting-based indoor and outdoor localization with LoRa and deep learning,” in GLOBECOM 2020-2020 IEEE Global Commun. Conf., Taipei, Taiwan, Dec. 07–11, 2020, pp. 1–6. doi: 10.1109/GLOBECOM42002.2020.9322261. [Google Scholar] [CrossRef]
99. W. -T. Sung, S. -J. Hsiao, S. -Y. Wang, and J. -H. Chou, “LoRa-based internet of things secure localization system and application,” in 2019 IEEE Int. Conf. Syst., Man Cybernet. (SMC), Bari, Italy, Oct. 06–09, 2019, pp. 1672–1677. doi: 10.1109/SMC.2019.8913875. [Google Scholar] [CrossRef]
100. A. Benouakta, T. M. Nguyen, F. Ferrero, L. Lizzi, and R. Staraj, “Design of a multi-standard UWB-LoRa antenna structure and transceiver board for high-accuracy and long-range localization applications,” Electronics, vol. 12, no. 21, 2023, Art. no. 4487. doi: 10.3390/electronics12214487. [Google Scholar] [CrossRef]
101. A. Strzoda, R. Marjasz, and K. Grochla, “LoRa positioning in verification of location data’s credibility,” Infocommun. J., vol. 14, no. 4, pp. 56–61, 2022. doi: 10.36244/ICJ.2022.4.8. [Google Scholar] [CrossRef]
102. R. Tumuhairwe and N. Amanquah, “Determining the location of a bus in real-time using LoRa technology,” in 2019 IEEE AFRICON, Accra, Ghana, Sep. 25–27, 2019, pp. 1–6. doi: 10.1109/AFRICON46755.2019.9133958. [Google Scholar] [CrossRef]
103. J. Shi and M. Sha, “Localizing campus shuttles from one single base station using LoRa link characteristics,” in 2022 Int. Conf. Comput. Commun. Netw. (ICCCN), Honolulu, HI, USA, Jul. 25–28, 2022, pp. 1–10. doi: 10.1109/ICCCN54977.2022.9868868. [Google Scholar] [CrossRef]
104. P. Manzoni, C. T. Calafate, J. -C. Cano, and E. Hernández-Orallo, “Indoor vehicles geolocalization using LoRaWAN,” Fut. Internet, vol. 11, no. 6, 2019, Art. no. 124. doi: 10.3390/fi11060124. [Google Scholar] [CrossRef]
105. M. Rosmiati, M. F. Rizal, and I. Wanti, “Monitoring location prototype using LoRa module,” MATEC Web Conf., vol. 218, 2018, Art. no. 03007. doi: 10.1051/matecconf/201821803007. [Google Scholar] [CrossRef]
106. N. I. Hamzah et al., “Elderly location monitoring system with LoRa (iLocation),” Malays. J. Invent. Innov., vol. 3, no. 4, pp. 1–12, 2024. [Google Scholar]
107. R. R. Shamshiri, E. Navas, V. Dworak, T. Schütte, C. Weltzien and F. A. A. Cheein, “Internet of robotic things with a local LoRa network for teleoperation of an agricultural mobile robot using a digital shadow,” Discov. Appl. Sci., vol. 6, no. 8, p. 414, 2024. doi: 10.1007/s42452-024-06106-7. [Google Scholar] [CrossRef]
108. O. Dieng, P. H. Congduc, and O. Thiare, “Outdoor localization and distance estimation based on dynamic RSSI measurements in LoRa networks: Application to cattle rustling prevention,” in 2019 Int. Conf. Wirel. Mob. Comput., Netw. Commun. (WiMob), Barcelona, Spain, Oct. 21–23, 2019, pp. 1–6. doi: 10.1109/WiMOB.2019.8923542. [Google Scholar] [CrossRef]
109. K. Yang, Y. Chen, and W. Du, “OrchLoc: In-orchard localization via a single LoRa gateway and generative diffusion model-based fingerprinting,” in Proc. 22nd Annual Int. Conf. Mob. Syst., Appl. Serv., Minato-ku, Tokyo, Japan, Jun. 3–7, 2024, pp. 304–317. doi: 10.1145/3643832.3661876. [Google Scholar] [CrossRef]
110. K. Z. Islam, D. Murray, D. Diepeveen, M. G. K. Jones, and F. Sohel, “LoRa localisation using single mobile gateway,” Comput. Commun., vol. 219, no. 1, pp. 182–193, 2024. doi: 10.1016/j.comcom.2024.03.012. [Google Scholar] [CrossRef]
111. M. Swain, D. Zimon, R. Singh, M. F. Hashmi, M. Rashid and S. Hakak, “LoRa-LBO: An experimental analysis of LoRa link budget optimization in a custom-built IoT test bed for Agriculture 4.0,” Agronomy, vol. 11, no. 5, 2021, Art. no. 820. doi: 10.3390/agronomy11050820. [Google Scholar] [CrossRef]
112. J. Teizer, J. Weber, J. König, B. Ochner, and M. König, “Real-time positioning via LoRa for construction site logistics,” in Proc. 35th Int. Symp. Automat. Robot. Construct. (ISARC), Berlin, Germany, 2018, pp. 1–8. doi: 10.22260/ISARC2018/0001. [Google Scholar] [CrossRef]
113. L. K. Baghel, S. Gautam, V. K. Malav, and S. Kumar, “TEMPSENSE: LoRa enabled integrated sensing and localization solution for water quality monitoring,” IEEE Trans. Instrum. Meas., vol. 71, pp. 1–11, 2022. doi: 10.1109/TIM.2022.3175059. [Google Scholar] [CrossRef]
114. A. Mackey and P. Spachos, “LoRa-based localization system for emergency services in GPS-less environments,” in IEEE INFOCOM 2019-IEEE Conf. Comput. Commun. Workshops (INFOCOM WKSHPS), Paris, France, Apr. 29–May 02, 2019, pp. 939–944. doi: 10.1109/INFCOMW.2019.8845189. [Google Scholar] [CrossRef]
115. C. Bouras, A. Gkamas, V. Kokkinos, and N. Papachristos, “Real-time geolocation approach through LoRa on internet of things,” in 2021 Int. Conf. Information Netw. (ICOIN)), Jeju Island, Republic of Korea, Jan. 13–16, 2021, pp. 186–191. doi: 10.1109/ICOIN50884.2021.9333860. [Google Scholar] [CrossRef]
116. H. Zhang, G. Liu, Y. Xu, and T. Jiang, “LoRaAid: Underground joint communication and localization system based on LoRa technology,” IEEE Trans. Wirel. Commun., vol. 22, no. 6, pp. 3155–3169, 2023. doi: 10.1109/TWC.2023.3325330. [Google Scholar] [CrossRef]
117. G. M. Bianco, R. Giuliano, G. Marrocco, F. Mazzenga, and A. Mejia-Aguilar, “LoRa system for search and rescue: Path-loss models and procedures in mountain scenarios,” IEEE Internet Things J., vol. 8, no. 3, pp. 1985–1999, 2020. doi: 10.1109/JIOT.2020.3017044. [Google Scholar] [CrossRef]
118. M. Abboud, C. Nicolas, and G. Habib, “Distance estimation using LoRa and neural networks,” in Int. Conf. Mach. Learn. Netw., 2021, pp. 148–159. doi: 10.1007/978-3-030-98978-1_10. [Google Scholar] [CrossRef]
119. X. Xie et al., “An intelligent smoke detector system based on LoRa and indoor positioning,” DEStech Transact. Comput. Sci. Eng., vol. 1, pp. 268–273, 2018. doi: 10.12783/dtcse/CCNT2018/24711. [Google Scholar] [CrossRef]
120. T. Abderrahmane, N. Amardjia, and M. Tamali, “Experimental analysis for comparison of wireless transmission technologies: Wi-Fi, Bluetooth, ZigBee and LoRa for mobile multi-robot in hostile sites,” Int. J. Elect. Comput. Eng., vol. 14, no. 3, 2024. doi: 10.11591/ijece.v14i3.pp2753-2761. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools