
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
LiDAR-Visual SLAM with Integrated Semantic and Texture Information for Enhanced Ecological Monitoring Vehicle Localization
1 Foreign Environmental Cooperation Center, Ministry of Ecology and Environment of PRC, Beijing, 100035, China
2 Beijing Computing Center Co., Ltd., Beijing Academy of Science and Technology, Beijing, 100083, China
3 Beijing Guyu Interactive Artificial Intelligence Application Co., Ltd., Beijing, 100024, China
* Corresponding Author: Liutao Zhao. Email:
Computers, Materials & Continua 2025, 82(1), 1401-1416. https://doi.org/10.32604/cmc.2024.058757
Received 20 September 2024; Accepted 18 November 2024; Issue published 03 January 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Ecological monitoring vehicles are equipped with a range of sensors and monitoring devices designed to gather data on ecological and environmental factors. These vehicles are crucial in various fields, including environmental science research, ecological and environmental monitoring projects, disaster response, and emergency management. A key method employed in these vehicles for achieving high-precision positioning is LiDAR (lightlaser detection and ranging)-Visual Simultaneous Localization and Mapping (SLAM). However, maintaining high-precision localization in complex scenarios, such as degraded environments or when dynamic objects are present, remains a significant challenge. To address this issue, we integrate both semantic and texture information from LiDAR and cameras to enhance the robustness and efficiency of data registration. Specifically, semantic information simplifies the modeling of scene elements, reducing the reliance on dense point clouds, which can be less efficient. Meanwhile, visual texture information complements LiDAR-Visual localization by providing additional contextual details. By incorporating semantic and texture details from paired images and point clouds, we significantly improve the quality of data association, thereby increasing the success rate of localization. This approach not only enhances the operational capabilities of ecological monitoring vehicles in complex environments but also contributes to improving the overall efficiency and effectiveness of ecological monitoring and environmental protection efforts.Keywords
In today’s rapidly evolving society, accelerated urbanization coupled with increasingly severe environmental issues has significantly amplified the importance of ecological monitoring vehicles. These vehicles have become indispensable tools in modern urban management and environmental protection [1,2]. Equipped with cutting-edge sensors and sophisticated data processing systems, they are capable of real-time data collection and analysis in both complex urban landscapes and dynamic natural environments. Looking forward, these vehicles are expected to play a crucial role in providing accurate and comprehensive services for species surveys and environmental monitoring. Their onboard monitoring systems are multifaceted, including meteorological sensors, air quality monitors, thermometers, noise sensors, high-resolution cameras, and LIDAR sensors. This extensive array of sensors allows for a comprehensive, multidimensional approach to environmental data collection. Such capabilities are vital, offering essential scientific and technical support for a range of applications including urban planning, tracking pollution sources, and responding effectively to sudden environmental events [3].
Despite notable advancements in technology, ecological monitoring vehicles continue to confront several challenges in practical deployment, with the enhancement of positioning accuracy being a particularly critical issue [4]. Achieving precise real-time positioning in dynamically changing ecological environments remains a complex and challenging task, largely dependent on the efficacy of Simultaneous Localization and Mapping (SLAM) technology [5]. Although significant progress has been made, existing technologies have proven effective in addressing specific environmental changes, such as puddles and snowdrifts [6–8], the issue of positioning module failures induced by environmental dynamics persists.
This study aims to address these challenges by integrating LiDAR inertial odometry (LIO) with a global LiDAR localization module that is based on map matching techniques. These measurements are synthesized within a pose graph optimization framework, creating a robust localization system capable of handling temporary ecological and environmental changes or inaccuracies in the map, all while ensuring consistent global localization. This innovative approach provides the technical foundation necessary for effective monitoring and surveying of field species. The specific contributions of this paper are outlined as follows:
(1) Development of an integrated framework for the localization of ecological monitoring vehicles that dynamically merges global matching and local odometry information. This integration enhances the system’s resilience against failures caused by fluctuating indoor environments and other dynamic conditions.
(2) Creation of a closely integrated LiDAR-Inertial Odometry system that leverages both occupancy data and LiDAR intensity information. This system is designed to deliver precise real-time state estimations, improving the accuracy and reliability of ecological monitoring.
(3) Establishment of a reliable ecological monitoring vehicle localization system that has been rigorously tested in various environments, including busy indoor streets and diverse outdoor settings. This testing demonstrates the system’s robustness and adaptability to dynamically changing conditions, further validating its effectiveness for real-world applications.
Constructing a continuous 7-day localization system poses significant challenges. Wolcott et al. [6] addressed the issue of varying environmental conditions such as repavement and snow by utilizing a robust LiDAR system coupled with multi-resolution mapping techniques. This approach ensures the system remains reliable under diverse and dynamic conditions. Wan et al. [8] made strides in navigation by incorporating altitude cues, which assist in improving the accuracy of localization in varying terrains. Levinson et al. [9] tackled these challenges by normalizing LiDAR scans, which effectively reduces variations in reflectance that can otherwise lead to inconsistencies in the data. Meanwhile, Aldibaja et al. [7] focused on enhancing system robustness in adverse weather conditions, including rain and snow, by applying Principal Component Analysis (PCA) and edge profiles to better handle the noise and distortions associated with such environments. Our research aims to provide a more generalized solution by integrating odometry with global matching cues, offering a versatile approach to continuous localization. In contrast, other studies [10–14] have relied predominantly on vision sensors, which can be susceptible to significant performance degradation due to changes in appearance and lighting conditions.
Several studies have made notable contributions to LiDAR odometry and SLAM [15–17]. In particular, inertial data has been used to support motion estimation [18,19] and distortion correction [20–22], enhancing the precision of constraints [23,24] and contributing to the development of integrated odometry solutions [25,26]. Building on Hess’s work [16], which highlighted the benefits of LiDAR-inertial odometry due to its alignment with map representation, our approach integrates inertial sensors to achieve improved performance and robustness. Drawing inspiration from previous research, we incorporate these inertial sensors to further enhance the accuracy and reliability of our system.
2.3 Localization Fusion Methods
Fusion methods are crucial in combining estimates from various sensors to improve overall performance. Loosely-coupled fusion techniques leverage complementary sensors such as Global Navigation Satellite System (GNSS) [27], cameras [28], odometers [29], and Inertial Measurement Units (IMUs) to achieve more accurate and reliable localization results. Some methodologies [8,30,31] implement Kalman filters to perform sensor fusion, which helps in combining data from different sources effectively. Our approach aligns with [31] by employing a graph-based framework, which offers computational efficiency and robust performance [32,33]. In a related study, the authors [34] demonstrated the effectiveness of a tightly-integrated system combining GNSS, LiDAR, and inertial sensors, showcasing the benefits of a holistic approach to sensor fusion for enhanced localization.
This section provides a detailed overview of the proposed architecture for the Visual Boosted Registration Framework, as illustrated in Fig. 1. Our system is designed to accurately register the source frame with the target frame, emphasizing crucial aspects such as data association and the estimation of relative pose transformations. Each frame within our system is composed of multi-camera images with minimal overlap, accompanied by a 64-line laser point cloud. The images are 1920*1080 pixel surround images after de-distortion, and the laser point cloud is the point cloud after removing motion distortion.
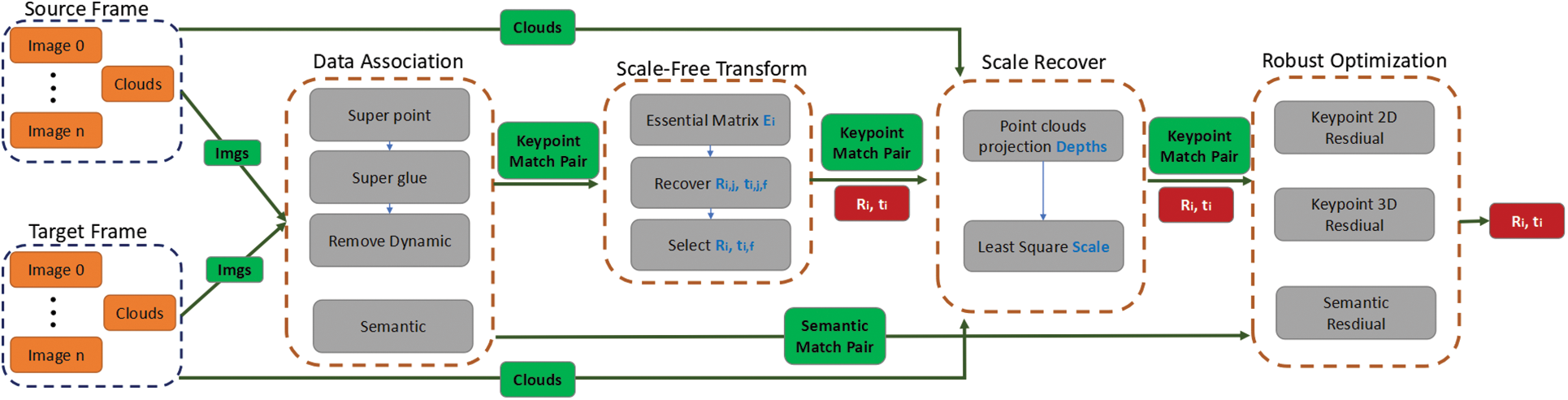
Figure 1: The proposed architecture
We assume that the camera intrinsics and sensor extrinsics are precisely calibrated, and that time synchronization with IMU compensation is accurately accounted for, ensuring the precision of pose transformations. Under these assumptions, we consider these parameters to be sufficient for our calculations and subsequent processing. The system ultimately outputs the pose transformation that defines the spatial relationship between the two frames after analyzing their input data. The framework comprises four key modules: Data Association, Scale-free Transform Estimate, Recover Scale, and Robust Optimization. Fig. 1 provides a comprehensive depiction of the workflow involved in these modules. Initially, the Data Association module is responsible for extracting and associating image keypoints and semantic objects from the laser point cloud. This process involves matching these keypoints and semantic objects between the source and target frames to generate a set of corresponding keypoint and semantic matching pairs. These matching pairs are then processed through the Scale-free Transform Estimate module, which computes the scale-free pose transformation between the frames. This transformation is performed without considering the absolute scale, focusing instead on the relative spatial arrangement of the keypoints and semantic objects. The subsequent Recover Scale module is employed to address the scale of the transformation, adjusting the computed pose to accurately reflect the true scale of the frames. Finally, the Robust Optimization module refines the pose transformation by incorporating robust optimization techniques to improve accuracy and handle any discrepancies or errors in the initial data.
Overall, this workflow ensures that the registration process is both precise and resilient, leveraging the strengths of each module to produce an accurate pose transformation between the source and target frames. The pose transformation is recorded as
Data association is a critical component for successful registration. A common approach involves iteratively finding nearest point correspondences within a predefined distance threshold, which requires an initial estimate of the relative pose between the datasets. However, associating data based solely on geometry poses significant challenges. The correspondence may be effective only for certain 3D geometric features or can lead to degeneracies in specific dimensions, as noted in Reference [35]. Texture information plays a crucial role in achieving stable correspondences, especially in environments with degenerate features, such as tunnels, highways, and complex urban scenes, where geometric features alone may not provide reliable matching.
(1) 2D Keypoints
Our method employs the SuperPoint [36] network to extract 2D keypoints from all images. To mitigate the impact of incorrect matches, we utilize the SuperGlue [37] network for improved matching accuracy across all pairs of images requiring keypoint matching. The presence of numerous moving objects in real-world road scenes can significantly affect the accuracy of keypoint-based calculations. To address this issue, we incorporate the SegNet [38] network for semantic segmentation to differentiate between dynamic and static objects. For each keypoint pair generated by SuperGlue, if either keypoint is found on a dynamic object, we discard the pair. Only the keypoint pairs that pass this semantic filtering are retained as final correspondences for further feature point-related calculations.
Once 2D-2D data association is established, we can recover the relative pose by decomposing the essential matrix. By associating LiDAR points with image features, we can estimate the scale using the depth information of each keypoint. These processes, including the detailed steps for pose recovery and scale estimation, are elaborated upon in the subsequent sections.
(2) Semantic Objects
In addition to determining the initial relative pose, another critical aspect of data association for registration is the quality of the correspondence ratio. In practice, texture-based data association often focuses on ground features, while distinctive landmarks in the point cloud can be utilized to construct correspondences that help constrain the horizontal dimension. We establish correspondences for the same landmark, such as road signs or pillars, ensuring both semantic and geometric consistency.
We parameterize semantic objects as primitives, such as lines or planes, and align them using corresponding distance errors. To achieve accurate object correspondences, we employ a Random Sample Consensus-based (RANSAC-based) approach to identify the closest (within a specified threshold distance) and unique landmarks across frame pairs. Typically, poles are particularly distinctive for lane lines. After determining an initial relative translation, this translation is used to search for additional correspondences by examining all semantic objects within the frame pairs.
Since 2D keypoints in images do not provide accurate depth information, directly applying methods such as PnP (Perspective-n-Point) or ICP (Iterative Closest Point) can result in significant errors. To address this issue, our approach first estimates the rotation and scale-free translation matrices using the Essential Matrix. Subsequently, we use the projected depth values to estimate the translation scale.
In order to get the scale-free pose transformation, we use the 2D Keypoint matching results to estimate the Essential matrix
where
After that, the Fundamental Matrix is used to estimate the average distance between the two feature points and the respective baselines, and the feature points within the threshold are set as inlier points (
Since the previously restored pose transformations
The first is to use the laser point cloud to estimate the depth of the 2D Keypoints in the images. We project the laser point cloud onto the image according to the extrinsics between the cameras and the Laser sensor and the instrinsics of the cameras according to Eq. (2).
By projection the point cloud to image plane, we can associate the 2D keypoint to the 3D plane patch, and obtain a good depth estimation for matched 2D keypoints. After obtaining the depth estimation results of multiple keypoints, we start to recover the scale later. According to Section 3.2, the scale-free pose transformations
where
Thus, for the j-th matching feature point pair
Among them,
If
The same reason, if
Since the scale value
For each
In this way, for the previously estimated
We filter by counting the number of reprojection errors less than the threshold. For each
The set with the largest sum of the two quantities
In the robust optimization stage, the residuals term of our method is mainly divided into two parts: keypoint residuals and semantic residuals.
For keypoint residuals, we mainly use the pixel error as the residual term to optimize the pose transformation. In the matching results of multiple camera Keypoints obtained above, only some of the Keypoints have depth values. For the convenience of recording, for the multiple camera images of the source frame, the set of Keypoints without depth is recorded as
In order to obtain a more accurate pose transformation estimation, we designed residual items for both feature points to participate in the final optimization. As a result, the error term mainly includes two items, namely 2D error
For 2D Keypoints in
For other 2D Keypoints in
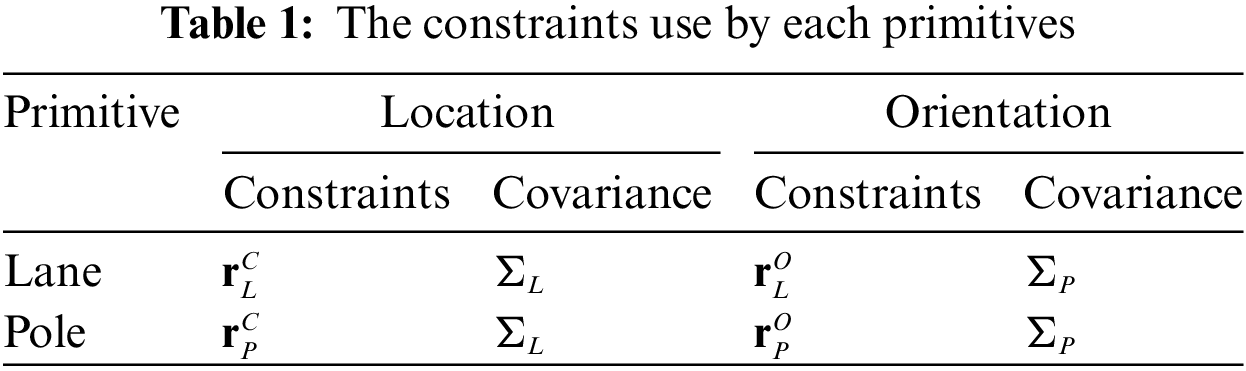
Semantic objects are parameterized to primitives as line or plane and then align them with corresponding distance error. Among them,
The semantic object residual shown in Fig. 2 can written as
and the symbol definition is shown in Table 1.
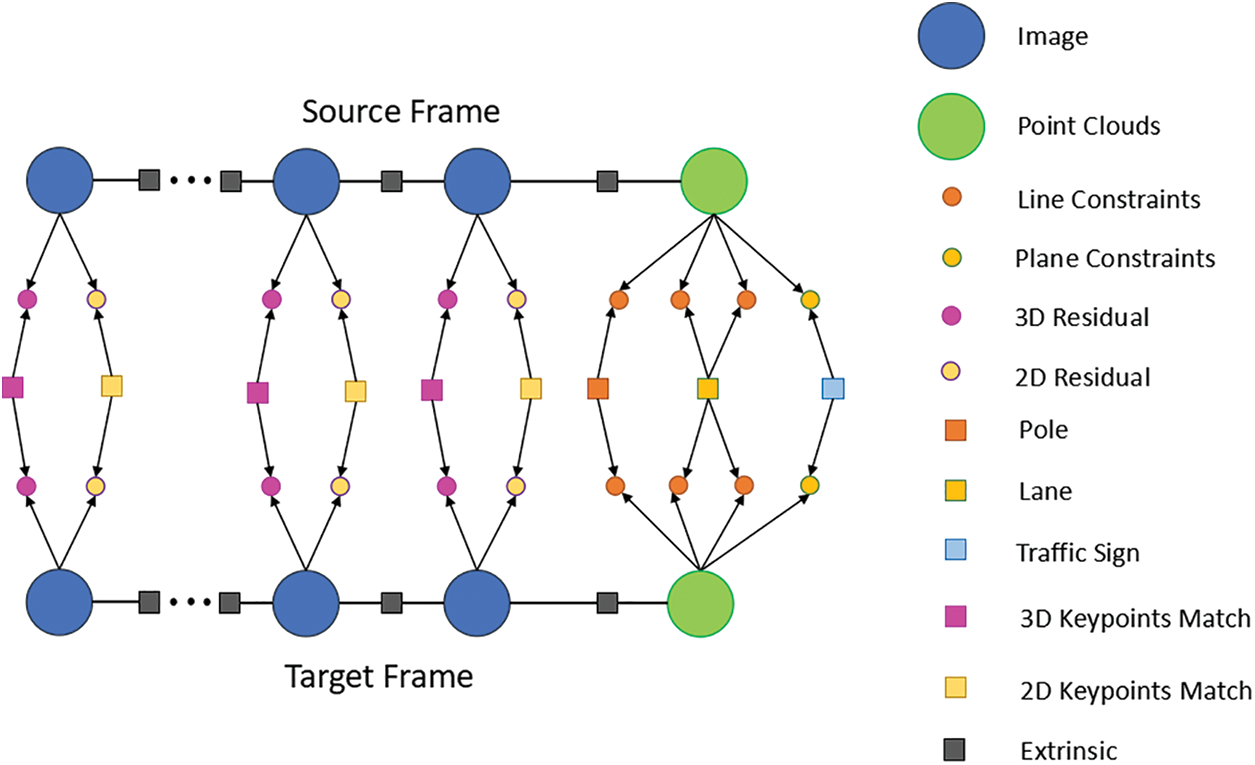
Figure 2: Graph structure of semantic objective
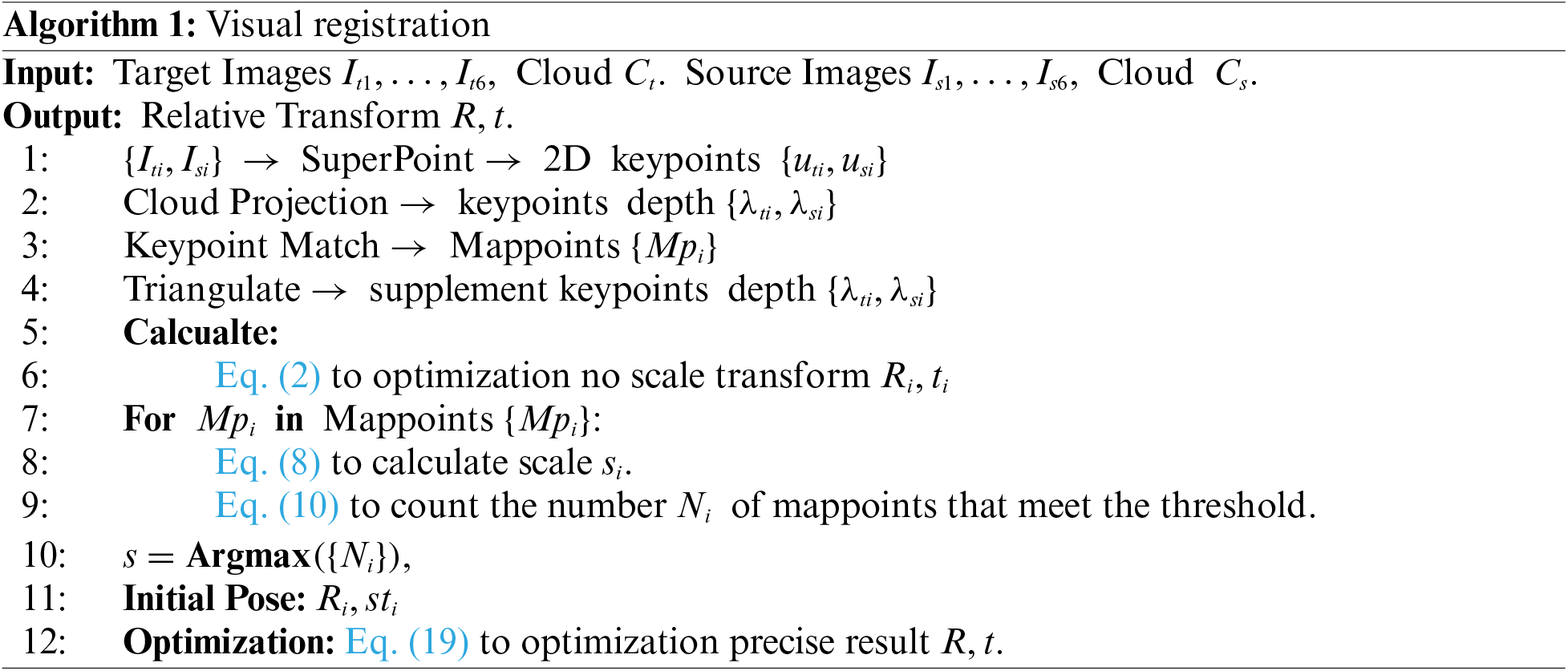
After jointly optimizing all these residuals, the final high-precision positioning can be obtained, In actual experiments, we set
The overall framework is shown in Algorithm 1.
Our system has been extensively tested in real-world scenarios primarily using two datasets, the Kitti dataset [39] and our internal hostital dataset.
The KITTI SLAM dataset, developed by the Karlsruhe Institute of Technology and the Toyota Technological Institute at Chicago, is a widely-used resource for benchmarking SLAM (Simultaneous Localization and Mapping) algorithms. It consists of data captured from a car equipped with multiple sensors, including high-resolution stereo cameras, a Velodyne 3D laser scanner, and GPS/IMU, providing rich information for 3D reconstruction and localization tasks. The dataset covers a variety of driving scenarios such as urban, rural, and highway environments, and includes ground truth poses obtained from GPS for accurate evaluation. With its diverse and challenging sequences, the KITTI SLAM dataset is essential for developing and testing autonomous driving and computer vision algorithms. It is publicly accessible and comes with extensive tools and benchmarks for performance evaluation.
Our Explainable-AI healthcare service robot platform is equipped with a Velodyne HDL-64E 360° LiDAR and a NovAtel PwrPak7D-E1 GNSS RTK receiver integrated with dual antennas and an Epson EG320N IMU. The ground truth poses used in the evaluation are generated using offline LiDAR SLAM methods typically formulated as a large-scale global least-square optimization problem, which are beyond the scope of this work.
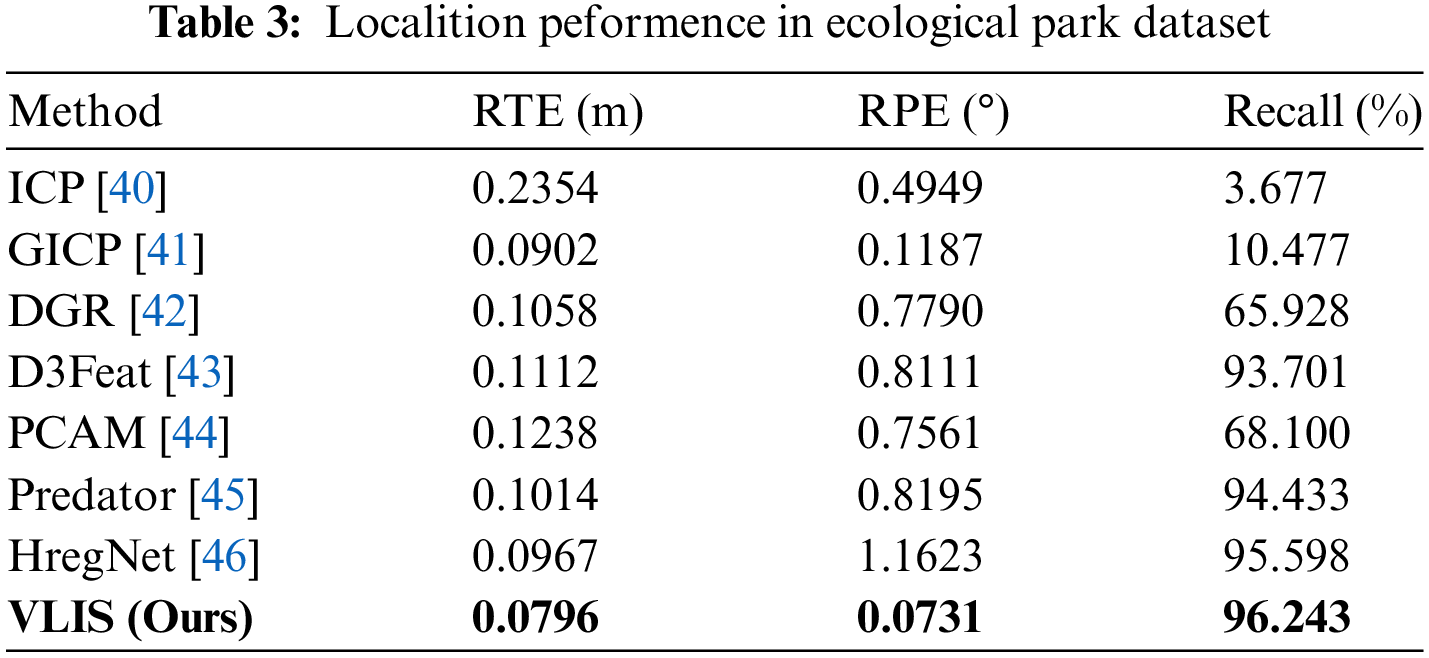
We use the error between the predicted and true values as the primary criterion for determining the success of localization. Specifically, localization is deemed successful when the difference in the rotation angle is within 10 degrees, and the translation error remains within 50 cm. This criterion is essential for ensuring the accuracy and reliability of localization systems. As illustrated in Tables 2 and 3, our evaluation focuses primarily on the Root Mean Square Error (RMSE) of the relative translation error (RTE) and the relative rotation error (RRE), alongside the recall rate.
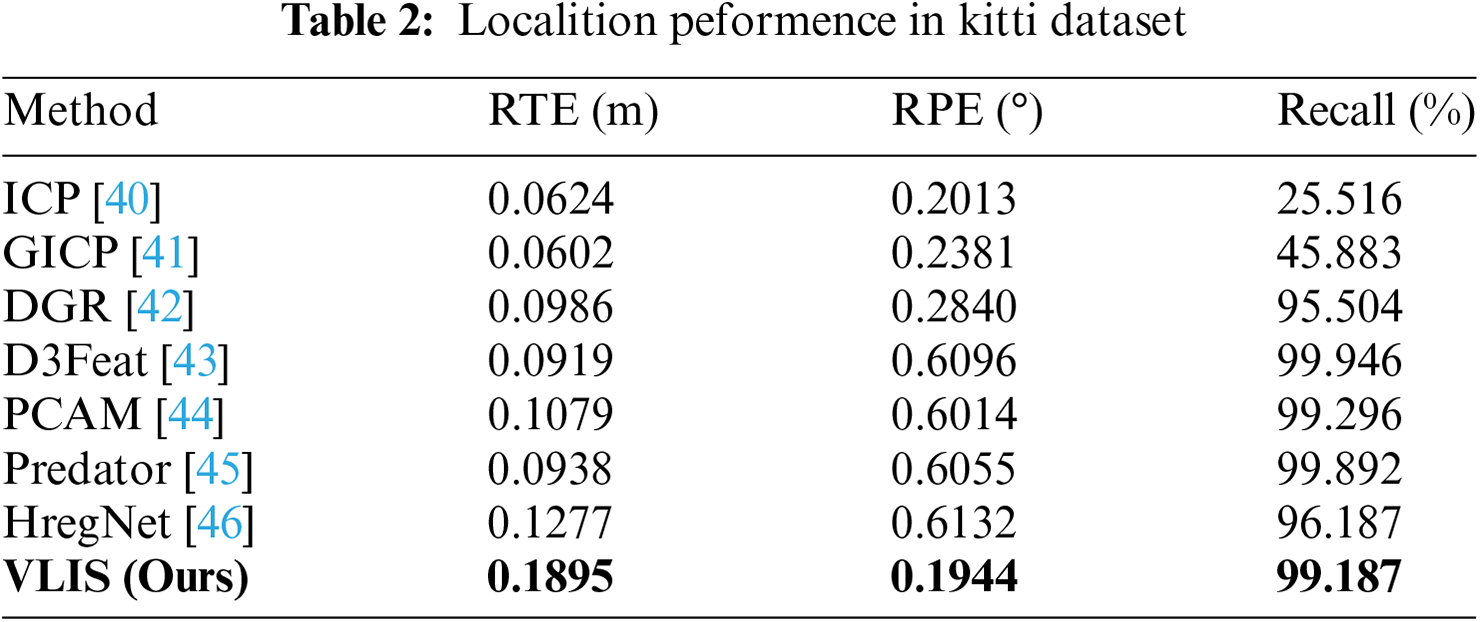
In the context of the KITTI dataset, our proposed method demonstrates the highest level of precision among all algorithms assessed. This exceptional performance is reflected not only in the low RMSE values for both translation and rotation errors but also in a recall rate that stands competitively against leading methods in the field. Our approach achieves superior results when tested on our internal hostile dataset, showcasing a remarkable ability to handle challenging conditions. This includes excelling in both translation accuracy and angular error measurements, further validating the robustness and effectiveness of our method. The comprehensive evaluation across different datasets highlights the strength of our approach in real-world scenarios. The KITTI dataset, known for its diverse driving conditions, serves as a rigorous benchmark, and the exceptional performance of our method underscores its capability to provide reliable localization under varied and complex conditions. Additionally, the results on our internal hostile dataset emphasize our method’s robustness in adverse situations, which is crucial for practical applications in autonomous driving and related fields.
In summary, the performance metrics detailed in Tables 2 and 3 underscore the effectiveness of our localization method. By achieving the highest precision in translation and rotation errors within the KITTI dataset and excelling on our internal hostile dataset, our approach demonstrates its superiority and reliability. This positions our method as a leading solution in the field, offering significant advancements in localization accuracy and robustness.
Our method has demonstrated improved performance on the local Ecological Park Datasets, which can be attributed primarily to the more advantageous external parameters provided by the Baidu dataset compared to the KITTI dataset. The Baidu dataset benefits from the inclusion of a greater number of cameras, specifically featuring a front view camera, a left view camera, and three additional cameras positioned at the rear and right rear. This increased number of cameras contributes to a wider field of view, which enhances the overall data richness and enables more accurate localization.
Furthermore, to facilitate a more nuanced comparison of success rates across different methods, we have plotted the recall rates of each method as the error threshold varies. This comparative analysis provides a clearer understanding of how different approaches perform under varying conditions. The results from the KITTI dataset and the Ecological Park Dataset are illustrated in Fig. 3, showcasing the effectiveness of our method in both scenarios.
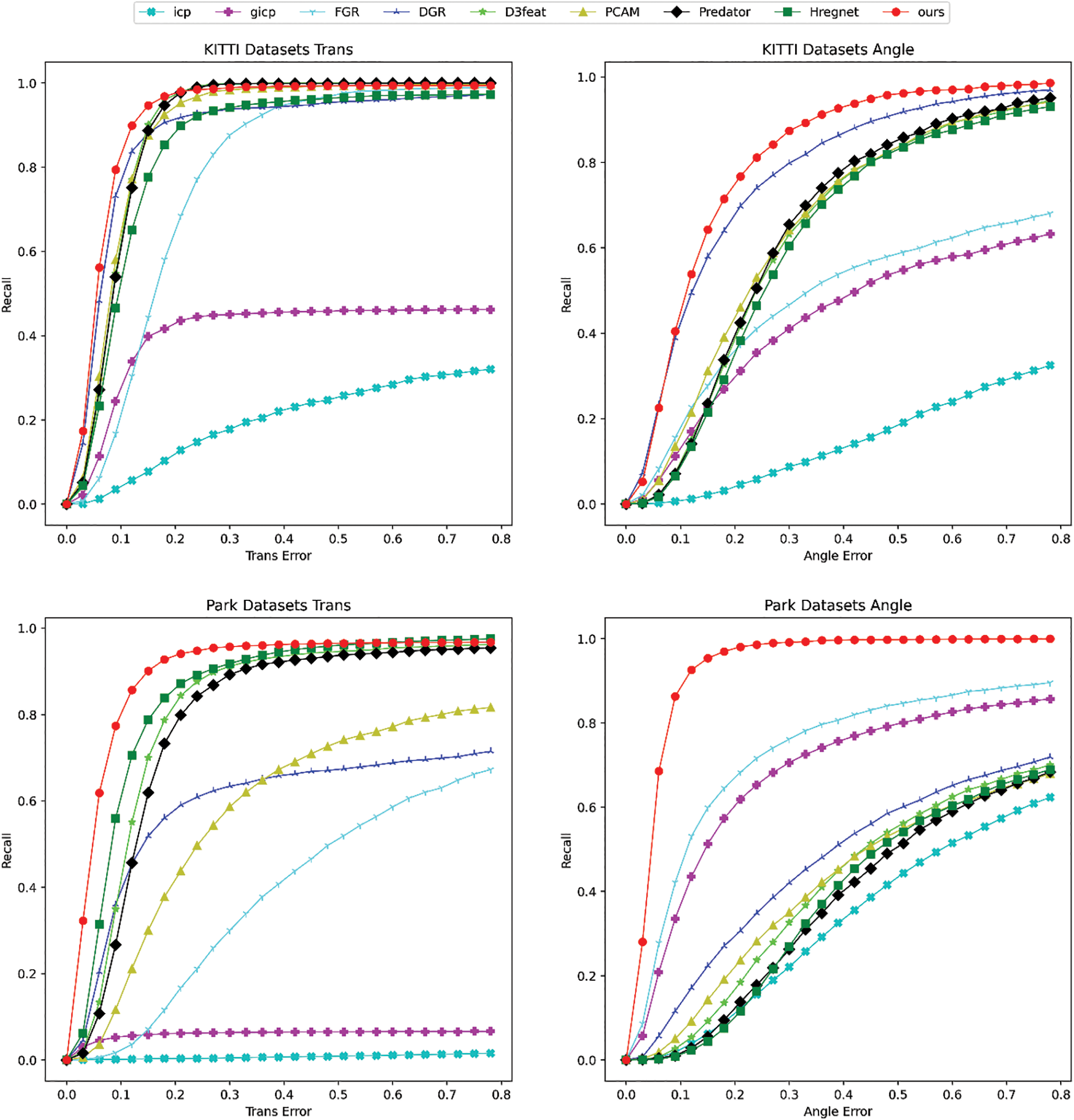
Figure 3: The recall rate of each method as the error threshold changes
The improved performance of the Ecological Park Datasets is indicative of the enhanced capabilities of our approach when supported by superior data quality and more comprehensive sensor setups. The wider field of view and the additional camera perspectives provided by the Baidu dataset play a crucial role in refining the accuracy of localization, demonstrating the advantage of using more detailed and varied data sources.
In summary, the comparison between the KITTI dataset and the Ecological Park Dataset highlights the benefits of using datasets with better external parameters and more extensive camera setups. By illustrating the recall rates as the error thresholds shift, Fig. 3 provides a valuable visual representation of our method’s performance, further emphasizing its effectiveness and reliability across different datasets.
Compared with traditional registration methods, our method does not rely on initial values and can still obtain relatively good results when the difference is more than 10 m. Compared with deep learning methods, it has better generalization and does not require separate training. In addition, this registration algorithm is far better than other methods in the registration of weak structure and strong texture areas.
However, in the experiment, we also found some disadvantages of our method, such as the possibility of misregistration in repeated problem areas. Since a large number of mutual transformations between multiple sensors are used, the accuracy of external parameters is required to be quite high. These issues can be considered for optimization in subsequent work.
This paper introduces a robust LiDAR localization framework specifically designed for ecological monitoring vehicles to address localization issues in dynamic environments. The proposed approach employs a pose graph-based fusion framework that adaptively integrates both LiDAR semantic information and visual key points. Compared with traditional registration methods, the method we propose does not rely on the initial value and can still obtain better results when the difference is more than 10 m. Compared with deep learning methods, it has better generalization and does not require separate training. At the same time, the registration effect will be better for areas with weak structures and strong textures. The method we proposed proves that the solution of combining laser and vision for positioning can effectively improve the positioning accuracy and success rate, thereby further improving ecological monitoring vehicle’s accuracy, and making it better for pollution monitoring and species survey and monitoring. In the future, we will consider researching more about the training or fine-tuning of the neural networks used (SuperPoint, SuperGlue, SegNet) to further improve the localization system.
Acknowledgement: This paper is supported by the project “Strengthening Coordinated Approaches to Reduce Invasive Alien Species (lAS) Threats to Globally Significant Agrobiodiversity and Agroecosystems in China”. This paper has received funding from the Excellent Talent Training Funding Project in Dongcheng District, Beijing.
Funding Statement: This paper is supported by the project “GEF9874: Strengthening Coordinated Approaches to Reduce Invasive Alien Species (lAS) Threats to Globally Significant Agrobiodiversity and Agroecosystems in China”. This paper has received funding from the Excellent Talent Training Funding Project in Dongcheng District, Beijing, with project number 2024-dchrcpyzz-9.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Yiqing Lu, Liutao Zhao; data collection: Yiqing Lu; analysis and interpretation of results: Yiqing Lu, Liutao Zhao, Qiankun Zhao; draft manuscript preparation: Liutao Zhao, Qiankun Zhao. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The datasets generated during and/or analyzed during the current study are not publicly available due to personal privacy reasons but are available from the corresponding author on reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest toreport regarding the present study.
References
1. Q. Tao, Z. Hu, G. Lai, J. Wan, and Q. Chen, “SMLAD: Simultaneous matching, localization, and detection for intelligent vehicle from LiDAR map with semantic likelihood model,” IEEE Trans. Vehicular Technol., vol. 73, no. 2, pp. 1857–1867, 2024. doi: 10.1109/TVT.2023.3321079. [Google Scholar] [CrossRef]
2. J. Song, Y. Chen, X. Liu, and N. Zheng, “Efficient LiDAR/inertial-based localization with prior map for autonomous robots,” Intell. Serv. Robot., vol. 17, no. 2, pp. 119–133, 2024. doi: 10.1007/s11370-023-00490-6. [Google Scholar] [CrossRef]
3. S. Hong, J. He, X. Zheng, and C. Zheng, “LIV-GaussMap: LiDAR-inertial-visual fusion for real-time 3D radiance field map rendering,” IEEE Robot. Autom. Lett., vol. 9, no. 11, pp. 9765–9772, 2024. doi: 10.1109/LRA.2024.3400149. [Google Scholar] [CrossRef]
4. C. Lee, S. Hur, D. Kim, Y. Yang, and D. Choi, “Insufficient environmental information indoor localization of mecanum mobile platform using wheel-visual-inertial odometry,” J. Mech. Sci. Technol., vol. 38, no. 9, pp. 5007–5015, 2024. doi: 10.1007/s12206-024-0836-z. [Google Scholar] [CrossRef]
5. H. Pham-Quang, H. Tran-Ngoc, T. Nguyen-Thanh, and V. Dinh-Quang, “Online robust sliding-windowed lidar slam in natural environments,” in 2021 Int. Symp. Elect. Electr. Eng. (ISEE), Ho Chi Minh, Vietnam, 2021, pp. 172–177. [Google Scholar]
6. R. W. Wolcott and R. M. Eustice, “Fast LiDAR localization using multiresolution gaussian mixture maps,” in IEEE Int. Conf. Robot. Automat., 2015, pp. 2814–2821. doi: 10.1109/ICRA.2015.7139582. [Google Scholar] [CrossRef]
7. M. Aldibaja, N. Suganuma, and K. Yoneda, “Robust intensity-based localization method for autonomous driving on snow-wet road surface,” IEEE Trans. Ind. Inform., vol. 13, no. 5, pp. 2369–2378, 2017. doi: 10.1109/TII.2017.2713836. [Google Scholar] [CrossRef]
8. G. Wan et al., “Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes,” in Proc. IEEE Int. Conf. Robot. Automa. (ICRA), 2018, pp. 4670–4677. [Google Scholar]
9. J. Levinson, M. Montemerlo, and S. Thrun, “Map-based precision vehicle localization in urban environments,” in Proc. Robot.: Sci. Syst., 2007. [Google Scholar]
10. C. McManus, W. Churchill, W. Maddern, A. D. Stewart, and P. Newman, “Shady dealings: Robust, long-term visual localisation using illumination invariance,” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2014, pp. 901–906. [Google Scholar]
11. C. Linegar, W. Churchill, and P. Newman, “Work smart, not hard: Recalling relevant experiences for vast-scale but time-constrained localisation,” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2015, pp. 90–97. [Google Scholar]
12. C. Linegar, W. Churchill, and P. Newman, “Made to measure: Bespoke landmarks for 24-hour, all-weather localisation with a camera,” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2016, pp. 787–794. [Google Scholar]
13. M. Brki, I. Gilitschenski, E. Stumm, R. Siegwart, and J. Nieto, “Appearance-based landmark selection for efficient long-term visual localization,” in Proc. IEEE Int. Conf. Intell. Rob. Syst. (IROS), 2016, pp. 4137–4143. [Google Scholar]
14. T. Sattler et al., “Bench- marking 6DOF outdoor visual localization in changing conditions,” in IEEE Conf. Comput. Vis. Pattern Recognit., 2018, pp. 8601–8610. [Google Scholar]
15. J. Zhang and S. Singh, “LOAM: LiDAR odometry and mapping in real-time,” in Proc. Robot.: Sci. Syst. (RSS), 2014. [Google Scholar]
16. W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-time loop closure in 2D LiDAR SLAM,” in Proc. IEEE Int. Conf. Robot. Automat., 2016, pp. 1271– 1278. [Google Scholar]
17. J. Zhang and S. Singh, “Low-drift and real-time LiDAR odometry and mapping,” Auton. Robots, vol. 41, no. 2, pp. 401–416, 2017. doi: 10.1007/s10514-016-9548-2. [Google Scholar] [CrossRef]
18. C. Park, S. Kim, P. Moghadam, C. Fookes, and S. Sridharan, “Probabilistic surfel fusion for dense LiDAR mapping,” in Proc. IEEE Int. Conf. Comput. Vis. (ICCV), 2017, pp. 2418–2426. [Google Scholar]
19. J. Behley and C. Stachniss, “Efficient surfel-based SLAM using 3D laser range data in urban environments,” in Proc. Robot.: Sci. Syst. (RSS), 2018. [Google Scholar]
20. D. Droeschel and S. Behnke, “Efficient continuous-time SLAM for 3D LiDAR-based online mapping,” in Proc. IEEE Int. Conf. Robot. Automat., 2018, pp. 1–9. [Google Scholar]
21. C. Park, P. Moghadam, S. Kim, A. Elfes, C. Fookes and S. Sridharan, “Elastic LiDAR fusion: Dense map-centric continuous-time SLAM,” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2018, pp. 1206–1213. [Google Scholar]
22. T. Shan and B. Englot, “LeGO-LOAM: Lightweight and ground-optimized LiDAR odometry and mapping on variable terrain,” in Proc. IEEE/RSJ Int. Conf. Intell. Rob. Syst. (IROS), 2018, pp. 4758–4765. [Google Scholar]
23. J. Deschaud, “IMLS-SLAM: Scan-to-model matching based on 3D data,” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2018, pp. 2480–2485. [Google Scholar]
24. Q. Li et al., “Net: Deep real-time LiDAR odometry,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2019, pp. 8473–8482. [Google Scholar]
25. J. Fan, X. Yang, R. Lu, Q. Li, and S. Wang, “Multi-modal scene matching location algorithm based on M2Det,” Comput. Mater. Contin., vol. 77, no. 1, pp. 1031–1052, 2023. doi: 10.32604/cmc.2023.039582. [Google Scholar] [CrossRef]
26. C. Qin, H. Ye, C. E. Pranata, J. Han, and M. Liu, “LINS: A LiDAR-Inerital state estimator for robust and fast navigation,” 2019, arXiv:1907.02233. [Google Scholar]
27. L. Chang, X. Niu, T. Liu, J. Tang, and C. Qian, “GNSS/INS/LiDAR- SLAM integrated navigation system based on graph optimization,” Remote Sens., vol. 11, no. 9, 2019, Art. no. 1009. [Google Scholar]
28. R. Mur-Artal and J. D. Tards, “Orb-slam2: An open-source slam system formonocular, stereo, and rgb-d cameras,” IEEE Trans. Robot., vol. 33, no. 5, pp. 1255–1262, 2017. doi: 10.1109/TRO.2017.2705103. [Google Scholar] [CrossRef]
29. H. Liu, M. Chen, G. Zhang, H. Bao, and Y. Bao, “ICE-BA: Incremental, consistent and efficient bundle adjustment for visual-inertial slam,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., 2018, pp. 1974–1982. [Google Scholar]
30. Y. Gao, S. Liu, M. Atia, and A. Noureldin, “INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm,” Sensors, vol. 15, no. 9, pp. 23286–23302, 2015. doi: 10.3390/s150923286. [Google Scholar] [PubMed] [CrossRef]
31. H. Liu, Q. Ye, H. Wang, L. Chen, and J. Yang, “A precise and robust segmentation-based LiDAR localization system for automated urban driving,” Remote Sens., vol. 11, no. 11, 2019, Art. no. 1348. doi: 10.3390/rs11111348. [Google Scholar] [CrossRef]
32. H. Zhang et al., “A LiDAR-INS-aided geometry-based cycle slip resolution for intelligent vehicle in urban environment with long-term satellite signal loss,” GPS Solut., vol. 28, 2024, Art. no. 61. doi: 10.1007/s10291-023-01597-0. [Google Scholar] [CrossRef]
33. H. Strasdat, J. Montiel, and A. J. Davison, “Real-time monocular SLAM: Why filter?” in Proc. IEEE Int. Conf. Robot. Automat. (ICRA), 2010, pp. 2657–2664. [Google Scholar]
34. T. S. Teoh, P. P. Em, and N. A. B. A. Aziz, “Vehicle localization based On IMU, OBD2, and GNSS sensor fusion using extended kalman filter,” Int. J. Technol., vol. 14, no. 6, pp. 1237–1246, 2023. doi: 10.14716/ijtech.v14i6.6649. [Google Scholar] [CrossRef]
35. W. Zhen, H. Yu, Y. Hu, and S. Scherer, “Unified representation of geometric primitives for graph-slam optimization using decomposed quadrics,” 2021, arXiv:2108.08957. [Google Scholar]
36. D. DeTone, T. Malisiewicz, and A. Rabinovich, “Superpoint: Self- supervised interest point detection and description,” in Proc. IEEE Conf. Comput. Vis. Pattern Recogni. Workshops, 2018, pp. 224–236. [Google Scholar]
37. P. -E. Sarlin, D. DeTone, T. Malisiewicz, and A. Rabinovich, “Su-perglue: Learning feature matching with graph neural networks,” in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., 2020, pp. 4938–4947. [Google Scholar]
38. G. Zhou, F. Huang, W. Liu, Y. Zhang, H. Wei and X. Hou, “AWLC: Adaptive weighted loop closure for SLAM with multi-modal sensor fusion,” J. Circuit Syst. Comp., vol. 33, no. 13, 2024, Art. no. 2450233. doi: 10.1142/S0218126624502335. [Google Scholar] [CrossRef]
39. L. Gao, X. Xia, Z. Zheng, and J. Ma, “GNSS/IMU/LiDAR fusion for vehicle localization in urban driving environments within a consensus framework,” Mech. Syst. Signal. Process., vol. 205, 2023, Art. no. 110862. doi: 10.1016/j.ymssp.2023.110862. [Google Scholar] [CrossRef]
40. P. J. Besl and N. D. McKay, “Method for registration of 3-D shapes,” in Sens. Fus. IV: Cont. Paradig. Data Struct., Boston, MA, USA, 1992, vol. 1611, pp. 586–606. [Google Scholar]
41. A. Segal, D. Haehnel, and S. Thrun, “Generalized-icp,” in Robot.: Sci. Syst., Seattle, WA, USA, 2009. [Google Scholar]
42. C. Choy, W. Dong, and V. Koltun, “Deep global registration,” in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., 2020, pp. 2514–2523. [Google Scholar]
43. X. Bai, Z. Luo, L. Zhou, H. Fu, L. Quan and C. -L. Tai, “D3Feat: Joint learning of dense detection and description of 3D local features,” in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., 2020, pp. 6359–6367. [Google Scholar]
44. A. -Q. Cao, G. Puy, A. Boulch, and R. Marlet, “PCAM: Product of cross- attention matrices for rigid registration of point clouds,” in Proc. IEEE/CVF Int. Conf. Comput. Vis., 2021, pp. 13229–13238. [Google Scholar]
45. S. Huang, Z. Gojcic, M. Usvyatsov, A. Wieser, and K. Schindler, “PREDATOR: Registration of 3D point clouds with low overlap-supplementary material,” 2021, arXiv:2011.13005. [Google Scholar]
46. F. Lu et al., “HRegNet: A hierarchical network for large-scale outdoor lidar point cloud registration,” in Proc. IEEE/CVF Int. Conf. Comput. Vis., 2021, pp. 16014–16023. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools