
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

Computing Challenges of UAV Networks: A Comprehensive Survey
1 School of Computer Science & Technology, Chongqing University of Posts and Telecommunications, Chongqing, 400065, China
2 Key Laboratory of Industrial Internet of Things and Networked Control, Ministry of Education, Chongqing University of Posts and Telecommunications, Chongqing, 400065, China
3 School of Computer Science and Technology, Zhejiang Gongshang University, Hangzhou, 310018, China
4 School of Artificial Intelligence, Nanjing University of Information Science & Technology, Nanjing, 210044, China
5 Department of Computer Science and Engineering, School of Convergence, College of Computing and Informatics, Sungkyunkwan University, Seoul, 03063, Republic of Korea
6 Department of Computer Science, Community College, King Saud University, Riyadh, 11495, Saudi Arabia
* Corresponding Authors: Xianxuan Lin. Email: ; Farman Ali. Email:
Computers, Materials & Continua 2024, 81(2), 1999-2051. https://doi.org/10.32604/cmc.2024.056183
Received 16 July 2024; Accepted 14 October 2024; Issue published 18 November 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Devices and networks constantly upgrade, leading to rapid technological evolution. Three-dimensional (3D) point cloud transmission plays a crucial role in aerial computing terminology, facilitating information exchange. Various network types, including sensor networks and 5G mobile networks, support this transmission. Notably, Flying Ad hoc Networks (FANETs) utilize Unmanned Aerial Vehicles (UAVs) as nodes, operating in a 3D environment with Six Degrees of Freedom (6DoF). This study comprehensively surveys UAV networks, focusing on models for Light Detection and Ranging (LiDAR) 3D point cloud compression/transmission. Key topics covered include autonomous navigation, challenges in video streaming infrastructure, motivations for Quality of Experience (QoE) enhancement, and avenues for future research. Additionally, the paper conducts an extensive review of UAVs, encompassing current wireless technologies, applications across various sectors, routing protocols, design considerations, security measures, blockchain applications in UAVs, contributions to healthcare systems, and integration with the Internet of Things (IoT), Artificial Intelligence (AI), Machine Learning (ML), and Deep Learning (DL). Furthermore, the paper thoroughly discusses the core contributions of LiDAR 3D point clouds in UAV systems and their future prediction along with mobility models. It also explores the prospects of UAV systems and presents state-of-the-art solutions.Keywords
In recent decades, the latest developments in 3D point clouds have come with vital applications in robotic sensing, mobile mapping, Augmented Reality (AR), Virtual Reality (VR), medicine, buildings, and other entertainment industries [1,2]. Wireless network communication technology has been witnessed with many applications and is used daily [3,4]. These networks are rapidly increasing, and so the demand is also growing. Different kinds of networks are used for communication scenarios. The major core concept is the small networks created for a short time and emergency applications [5]. Recently, the most emerging wireless communication has been the transmission of drones. These drones are called Unmanned Aerial Vehicles (UAVs), which simultaneously fly in the air with three-dimensional movements [6]. These form a network known as a flying ad hoc network. Different kinds of remote-control drones, i.e., UAVs, are used for communication. Communication occurs in two phases in UAV: UAV to UAV communication and UAV to Ground Station. In UAV-to-UAV communication, the swarm mechanism is applied to drones like nature-inspired moths and ants [7,8]. In this communication, one drone relates to another node in a fashion that one acts as a sender and router. The relay approach is also carried out using UAV-to-UAV communication. In the other phase, communication occurs by connecting the UAV to the ground station. The ground base station controls the UAV. In some terminologies, an operator sitting in the ground station controls all the communication scenarios of the UAVs. This communication phase is also known as UAV to infrastructure-based communication—core contributions of the following:
• To thoroughly analyze and investigate the major issues and challenges in the UAV network. This includes autonomous navigation, challenges in video streaming infrastructure, motivations for Quality of Experience (QoE) enhancement, and avenues for future research.
• Additionally, to conduct an extensive review of UAVs, encompassing current wireless technologies, applications across various sectors, routing protocols, design considerations, security measures, blockchain applications in UAVs, contributions to healthcare systems, and integration with the Internet of Things (IoT), Artificial Intelligence (AI), Machine Learning (ML), and Deep Learning (DL).
• Furthermore, the core contributions of LiDAR 3D point clouds in UAV systems and their future prediction, along with mobility models, should be thoroughly discussed. It also explores the prospects of UAV systems and presents state-of-the-art solutions.
UAV is a new member of Mobile Ad hoc Networks (MANETs) [9,10], where the 3D movement of the nodes takes place. Like UAV, Vehicular Ad-hoc Network (VANET) [11] also takes part in the communication scenario, but these nodes communicate on the ground and move in a 2D fashion. Due to easy installation and emergency services, the UAV has been considered the best communication technology in the recent era. These networks have paved the way for telecommunication at a low cost. The smart concept of drones is termed the Internet of Aerial Vehicles (IoAV) [12,13], in which each drone is equipped with smart fashion deployment, which takes its decision by itself. The communication of UAVs takes place in which the UAV is used to communicate with the UAV, V-to-V, and UAV to Vehicle. Numerous applications have emerged in which remote-control drones are used, like commercial drones for commercial usage purposes, drones for traffic surveillance, drones for crop monitoring, drones for border patrolling, drones for monitoring wildfires, drones for relaying Networks, drones for disaster management, and surveillance. These applications are discussed in detail in Section 2.
The latest growth has been due to the development of wireless technologies in recent years. The drone system can cope in all scenarios in which the entries of normal humans are too risky. These drone systems are used for remote sensing applications to sense the environment and target area with the help of a fixed camera equipped in the UAV. The UAVs are linked with the ground networks, and the other UAVs are linked with other UAVs. The connections of a UAV to another UAV form a swarm fashion of UAVs. The remote-control UAVs perform two kinds of tasks while sensing the target area. One is active sensing, and the other one is passive sensing. In active sensing, the UAV acquires and senses the target area by capturing it online. In passive sensing, the UAV acquires and gains the information from the target area, and then, on the ground station, the operators perform the operations on that information offline while not in active connectivity. Fig. 1 shows the communication scenario between the UAV-to-UAVs and the ground network VANET [2,14].
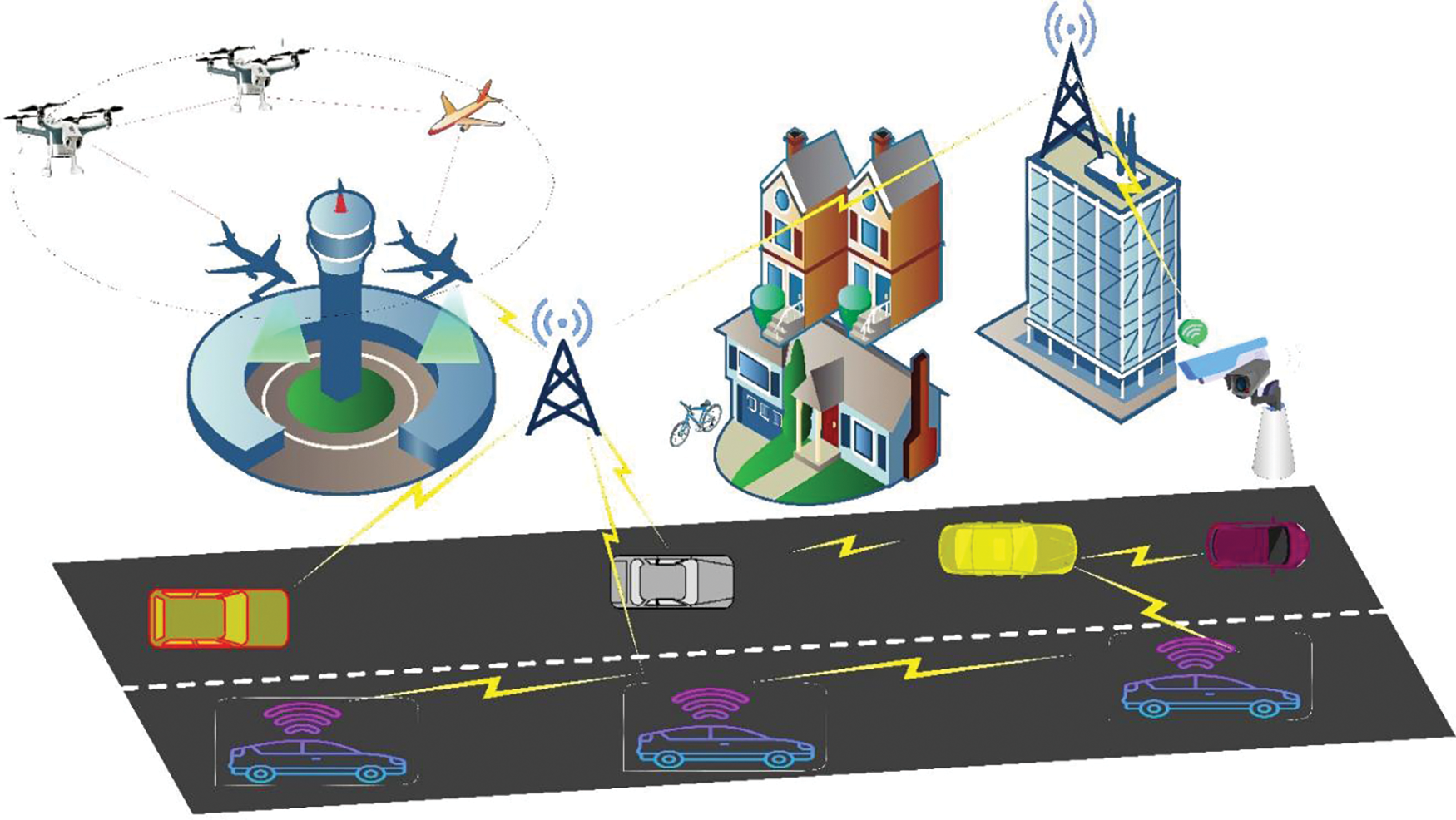
Figure 1: Communication scenario of UAV with VANET
UAVs can communicate, coordinate, and sense the desired area of interest. The classification-based illustration of the UAVs has been given in Fig. 2. Each UAV has an installed onboard monitor, sensors, cameras, Global Positioning System (GPS), and an autopilot system. The fixed-wing is continuously in motion, and UAVs are continuous.
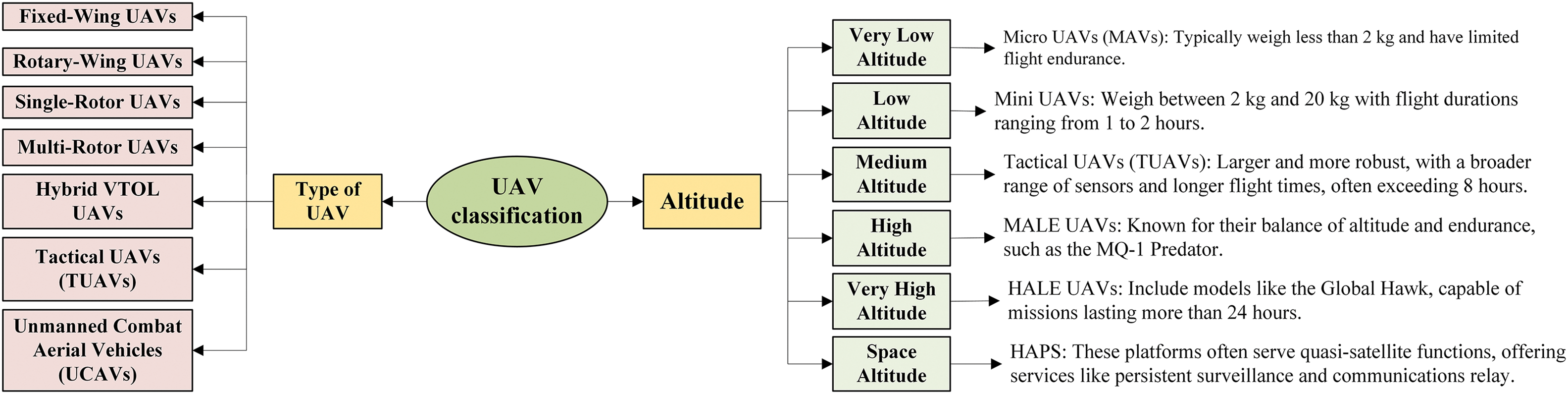
Figure 2: UAV classifications
Meanwhile, UAVs with rotor wings could hover and stay for as long as required in the air and can sense the area remotely. The UAVs have fixed and rotatory wings, have autopilot capabilities, and can fly from 10 up to 100 m/s in emergencies, as shown in Fig. 3. Furthermore, UAVs are also available at different high and low altitudes from the ground. Different UAVs are available in different sizes, weighing 0.5 up to 2500 kg. Each UAV has a short and long flight duration and communication, depending on the required task and transmission rate [15,16].

Figure 3: Different parts of a fixed wings drone system
UAVs fly independently in the air, or a remote procedure controls them. Applications of UAVs are evolving and growing each day. In early times, UAVs were used by military applications and were remotely directed. Furthermore, in the recent era, there have been different kinds of applications, such as non-military safety work, firefighting, and controlling. The application of a stand-alone UAV is limited, but multi-UAV systems have a vast number of civil, industrial, and military applications. With the advantage of a multi-UAV system, less time is consumed, and this could achieve and maximize the processing time in flying tasks compared to single-UAV systems. UAVs have been considered to have a high degree of mobility since these are flying robots, so their speed is much faster than ground vehicles. Different mobility models are used for UAVs, such as a random waypoint mobility model. which can direct the UAV system to fly and change its direction based on the basic mobility installations. The tasks that are performed by the multi-UAV system are difficult for a single-UAV system to accomplish. With cooperation and routing, these UAVs must cope with different tasks and can achieve numerous kinds of tasks that a single UAV system can’t. UAVs are of different names, such as flying robots, quad-copters, and drones. Because of the easy installation and utilization, small-size UAVs are considered the best for small projects. The researchers are still in the infancy of controlling the design life of UAVs (maneuver life), flight stability, energy consumption, design considerations, challenges during the flight, and network performance. With the latest improvements in the UAV systems that have been presented in different shapes and sizes, attention is drawn especially to the time-dependent tasks or the UAVs to cover a large area of interest. With the improvements of scientists in sensors, electronics, and communication tools, it has been considered that UAV systems will fly independently or be controlled remotely without human personnel. UAVs play an important role in secure communication because of their small operational expenditures, installation, easy connection, lightweight, and adaptability. Small UAV systems have limited capabilities and are lightweight in data delivery. Energy is also a major concern in UAV systems because these are equipped with limited-power batteries [17]. UAV systems are designed for remote sensing applications, and different cameras are installed in these to sense the target area. The details of the installed cameras in UAVs are given in Table 1.
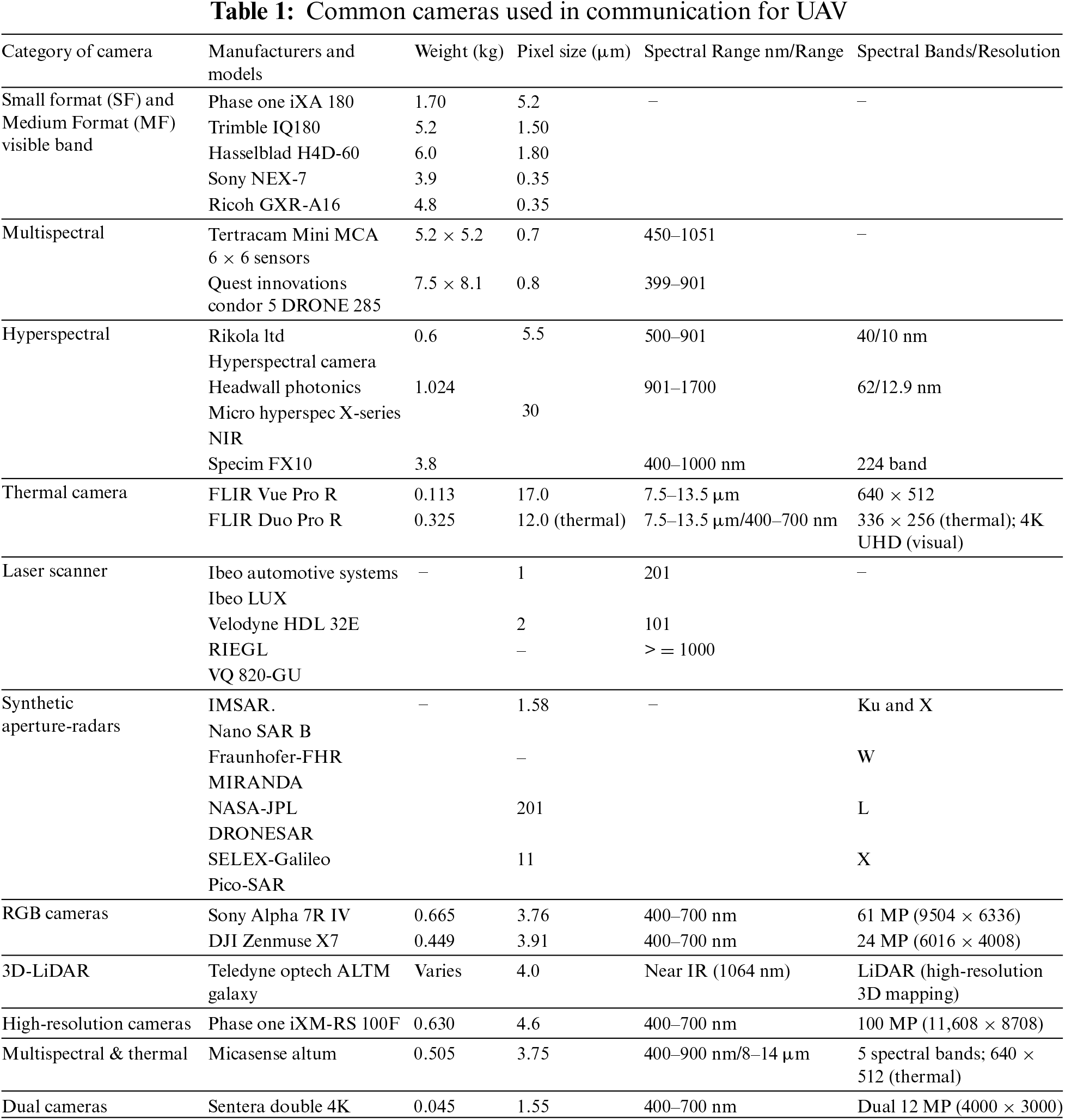
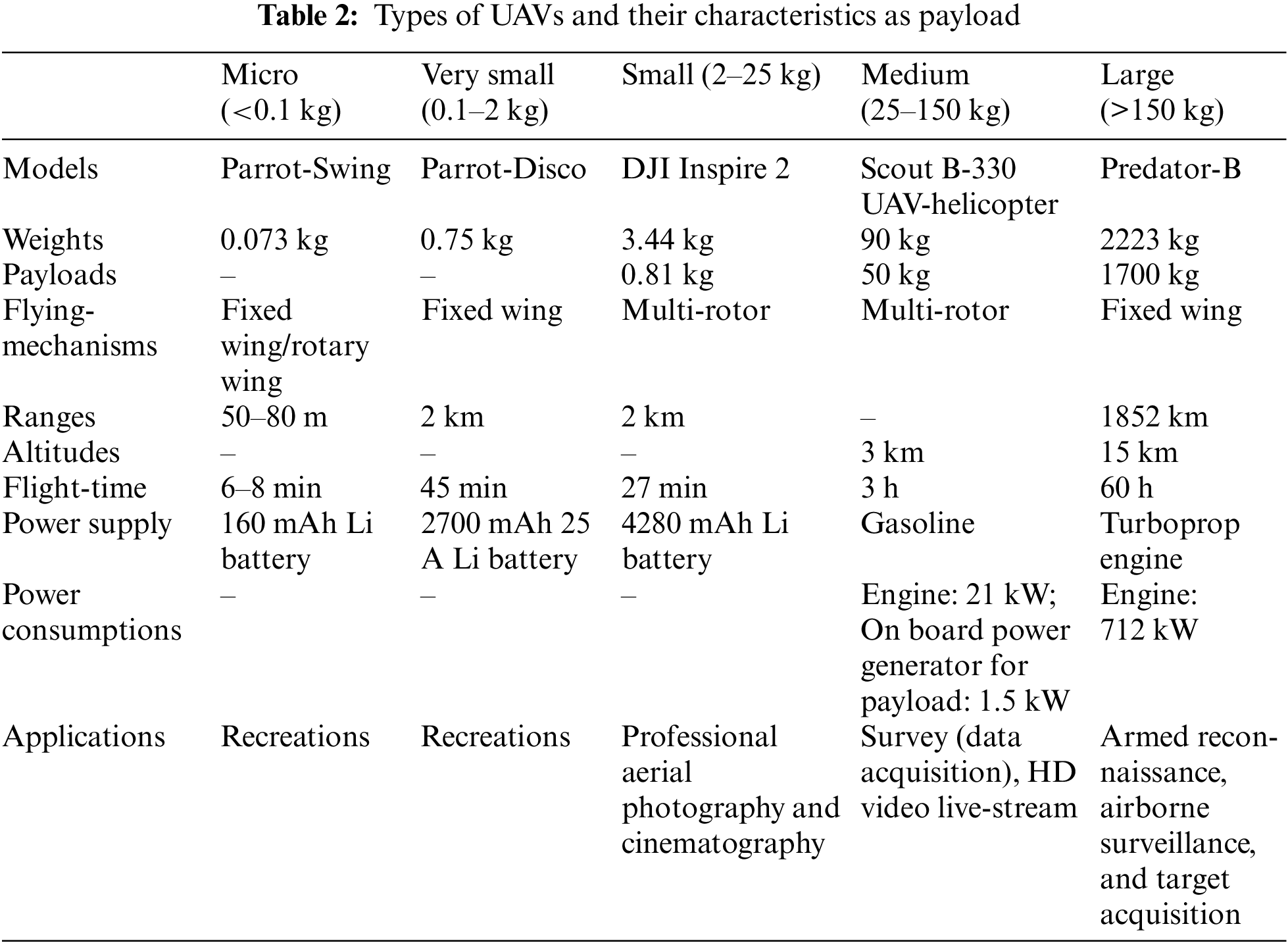
The range of camera technologies available for UAVs spans a variety of specialized functions and applications. RGB cameras capture high-resolution color images suitable for general photography and video recording. Thermal cameras detect infrared radiation, enabling effective nighttime operations and thermal inspections. Multispectral cameras capture specific bands of light, which is particularly useful in agriculture for monitoring plant health and identifying vegetation issues. Hyperspectral cameras provide detailed spectral information across numerous bands, essential for environmental monitoring and material identification tasks. LiDAR systems use laser light to create precise 3D maps and measure distances accurately. High-resolution cameras offer exceptionally detailed imaging capabilities, ideal for mapping and inspection tasks requiring fine detail. Dual cameras integrate two types of imaging systems into one setup, allowing simultaneous capture of different types of imagery for comprehensive analysis. Multispectral and thermal cameras combined provide a comprehensive approach to data capture, blending detailed spectral analysis with thermal imaging capabilities. Specialty cameras are tailored for specific applications, such as precise color measurement or specialized light analysis, enhancing the versatility of UAVs across various industries and research fields. The flying performance of the UAVs can perform different assignments efficiently. To accomplish direction-based achievements, the UAVs must organize and direct in a swarm fashion where each UAV communicates with another. Because of the small and lightweight UAVs, it is not possible to carry heavy objects by them. Cheaper and lightweight hardware may create a network among small UAVs [7,18,19]. Different flying UAVs communicate in UAV, which can communicate with one another in a nearby region. From this viewpoint, specific kinds of UAVs have been introduced that communicate in a group like a swarm, and a limited range of communication occurs in nearby surroundings. For civilian applications, the IEEE wireless standards are used for communication that operates at a lower altitude. These wireless standards are 802.15.1 (Bluetooth) and 802.15.4 (XBee), whereas for military applications, the IEEE standard wireless 802.11 with a/b/g/n [4]. All these standards are discussed in detail in Section 6. The UAVs and their different characteristics are given in Table 2.
UAVs have unlimited applications for civilians and the military, such as commercial UAVs, UAVs for traffic, UAVs for crop monitoring in the agriculture domain, UAVs for border surveillance, and Ground mobile robots can replace human beings in threatened environments [20,21], UAVs for disasters, and remote sensing. as shown in Fig. 4. The details of these are discussed in subsections.

Figure 4: Common applications of UAVs
It is clear from the current strategy and the vast number of designed drones that these drones/UAVs will be used for various tasks, from smart delivery to revenue generation. These UAVs deliver materials and products like pizza, as shown in Fig. 5. Commercial drones are those used in marketing and business for convenient delivery and revenue generation. According to the most recent research, UAVs may be used for marketing campaigns to boost sales and smart delivery of goods like pizza and other items. These unmanned aircraft fall under the category of commercial drones. When the US television program “60 min” first debuted, a man named Amazon founder Jeff Bezos demonstrated the smart delivery of a drone to bring a package from Amazon warehouses to the client’s doorstep. The delivery of the drones is not only limited to delivering pizza; these are also used to carry other items depending on the size and payload of the product. It is a safe and secure method to deliver goods using UAVs. On-road delivery can be difficult due to unavoidable circumstances of road rush traffic; hence, UAVs are the best option for transferring goods easily and quickly. Many federal authorities, especially in the US, use UAVs to deliver valuable stuff involving no human personnel [22,23].

Figure 5: Commercial UAV/drone
The most critical role for UAVs in urban monitoring and planning is traffic surveillance [24,25]. Typically, it has been accomplished using numerous cameras mounted on the tops of tall buildings, cameras plced on motorways, and helicopters. The US Department of Transportation has just begun using UAVs for traffic surveillance (US-DOT). As demonstrated, the UAVs could maintain and organize a safe environment for traffic safety and regulate and observe traffic activity. Normally, these UAVs have HD cameras that observe traffic using surveillance feeds. In Fig. 6, the traffic surveillance of UAVs can perform the duties of accident reporting, emergencies, route deviation, emergency route guidance, suspicious vehicles [26], traffic flow monitoring, parking search, and traffic jams [27,28].

Figure 6: Applications of UAVs for traffic surveillance
Fig. 7 depicts a scenario in which a UAV continuously monitors traffic situations with the assistance of control stations that may abruptly alter over time. As a result, it demonstrates that when a calamity, such as an emergency, orders are sent to the appropriate department by UAV from control stations. In this regard, UAVs play an important and robust role. There could be various applications for UAVs in such situations; therefore, handle it cautiously and completely.

Figure 7: Traffic surveillance using AVs
The main concept of Fig. 7 is deploying the UAV systems, especially for traffic surveillance. It can be seen in the Figure that the UAVs are deployed in the air to continuously monitor all the traffic activities, such as traffic rules, security, risks, and even emergencies, such as collisions of cars and accidents. These UAVs are connected to the base stations and then to the data center and web services, where the operator manages and controls them. It can also be used for further surveillance, such as security, fires, and safety [29,30]. Normally, traffic surveillance is carried out by UAVs in urban environments because of the highly populated areas and bulk of vehicle traffic. The best approach to using UAVs in overcrowded urban areas is cognitive radio technology (CRT). Because of this, the UAVs can switch the acquired information from one place to another and finally to the base station.
Initially, the agricultural technologist used several methods for monitoring crop conditions, such as eye inspection, molding localization, and color estimate [31]. However, after some time, crop monitoring was shifted to more complex technology and tools, such as gas sensors, pH scales, anemometers, and thermometers. However, there was a problem with using these instruments: non-real-time availability and the challenges associated with data collecting. WSNs were projected and shown a superior answer for these difficulties before being deployed in fields near crops in the intended area. In this crop monitoring scenario, WSN nodes were randomly deployed in the fields and operated in a mesh network. This network was boosting efficiency and dependability. However, due to the dynamic breadth of the conditions, such as animal ingress and frequent temperature changes, this network was insufficient to monitor efficiently. Fig. 8 depicts a crop monitoring arrangement.

Figure 8: Crop monitoring using UAVs
Only high-quality cameras with high megapixels and resolutions can capture the best images and record videos. However, outdated drones can suffer from high-quality data transmission because high-quality data also needs to be compressed. The servers are other devices that may not be able to handle high-volume data in large sizes. The LiDAR, a 3D point cloud, can transmit high-quality images and video and handle data compression. If the original data size is 100 MB, then the LiDAR compression can compress it up to 15 MB, which is and outstanding approach to minimize the size and keep the original quality of the images and videos captured by drones.
Japan demonstrated using UAVs for crop monitoring in the early 1980s [32]. At the time, Yamaha was designing and developing revolutionary UAVs for crop spraying. Following that, the use of UAVs in agriculture was introduced to solve the issues and problems of remote sensing of crops, like manned craft or satellite, which have some limitations and restrictions for meeting the needs of agricultural prerequisites. UAVs have been formally incorporated for agricultural monitoring and sensing via sensors deployed in the fields. These drones/UAVs could transmit high-quality photographs and movies, which were key constraints in agricultural practices due to their short duration window to obtain high-quality photos.
The majority of the military of the recent century are using UAVs for safe and secure border patrolling to observe the area remotely from perpetrators [33] and other malicious things, as shown in a scenario in Fig. 9. The use of UAVs for national security purposes in border surveillance is fast increasing. Usually, the patrolling system requires active and forceful human employees. This may include border troops and checkpoints. These requirements are developed and implemented globally to inspect and monitor entering and leaving vehicles for restricted and forbidden acts and items. A border troop is a group of people who inspect and monitor their border area for encroachment and other activities within the time range specified. Using a patrolling system manual, some regular border patrol systems allocate the most active and aware humans for border monitoring. Many surveillance systems have been developed for real-time border patrolling with little human intervention and great accuracy. Sensor nodes are locations where any activity, movement, or other activity that crosses the borderline can be detected. As a result of UAVs’ great mobility and ability to cover a vast area faster than humans with a clear Line of Sight (LoS), human involvement is reduced. As a result, the assets may be predicted to decide management activities based on UAV information [34,35].

Figure 9: Border patrolling using UAVs
Fig. 9 depicts the three layers of border patrolling. Some sensors are installed underground to observe the activity, and these sensor nodes are connected to the cameras and other base stations, which can generate an alarm when there is unidentified activity. Nodes implanted with video cameras or night vision scopes and multimedia sensor nodes are employed at the second layer to deliver graphical information and improve system efficiency. Finally, drones/UAVs are positioned at the third layer to track intrusion-based evidence of sensor nodes by capturing and assisting them via border patrol agents [36].
2.5 Disaster Management and Search and Rescue Operations
UAVs are especially best used in places where the entry of humans is dangerous, too risky, and impossible. Places like Maritime disaster situations [37,38], volcanoes [39], floods [40], and earthquakes [41,42] are where the best utilization of UAVs can be made. With the enhancement of the CRT technology equipped in UAVs, these are the best features in which these UAVs operate effectively. By doing so, the UAVs can effectively acquire knowledge and sense the area of interest. Focusing on the target from the sky could observe the disaster area and the area for any people who may have suffered from the disaster. The UAVs, in this scenario, are the best solution for search and rescue operations and to keep information about the target area and how much damage has occurred. With the proper utilization of the CRT, the UAVs are performing well in disaster situations to observe and manage. A scenario of the disaster management discussion is given in Fig. 10.

Figure 10: UAVs in disaster management
2.6 Wildlife and Wildfire Observing
Monitoring and observing [43] are the core contributions of the UAVs for which they are specially designed. Wildlife is important, and many living animals in the wild can preserve nature and the atmosphere. A scenario of UAVs is given in Fig. 11, in which the UAVs observe wildlife. These are to observe the animals and the entire wild environment, such as flooding, fire, and other disaster situations. As mentioned, CRT technology is the best idea, equipped in the UAVs for such monitoring. This technology is sensitive to the environment and has cognitive sensing capabilities that observe motion and sense the target area. Sometimes, documentaries are also made about wildlife animals for information, knowledge, and other research. The concept is to continuously monitor and experience the activities and life of the wild, such as any disaster situations, and also the knowledge and information regarding the animals living in the forest.

Figure 11: UAVs monitoring wildfire in wildlife
The network can reduce its speed and access when the range increases from one device to another. For such issues and problems, the relay method enhances the network and reduces the distance [44]. The UAVs are used as relays for the networks, which can help reduce distance and increase the bandwidth and throughput of the network. When there is no clear LoS, the UAVs sometimes cover the area and monitor and enhance the network from above the ground. The relaying network scenario is shown in Fig. 12.
Figure 12: Relaying network using UAV
UAVs can be used for different applications, including remote sensing and GIS [45,46]. As from the name itself, this is a remote procedure. Hence, UAVs are used as remote sensing applications to acquire and gain meaningful information from the target area by sensing it remotely using onboard cameras and sensors. They analyze the area of interest and observe and investigate it for mineralization, productivity soil, soil organic matter, etc. Remote sensing drones are also used to analyze and check the snow-covered area and indoor location [47,48], the range of the snowfall, and so on—the scenario of UAVs as remote sensing is shown in Fig. 13.

Figure 13: UAVs for remote sensing
3 The Design Considerations of UAVs
Because of the unique features of UAVs, different planning considerations are required compared to standard impromptu systems. Here, true structure thoughts should be discussed: Flexibility, dormancy, variety, UAV stage requirements, adaptability, and transmission capacity.
The nodes of UAVs are exceedingly versatile. Nodes’ behavior continues to change because of this. The paths of UAVs fluctuate throughout time, and their separation is also not constant. Another issue is UAV disappointment, which reduces the quantity of UAVs in systems. As a result, the UAV setup should consider UAV disappointments and ongoing path modifications. The system’s overall execution depends on the flexibility with which fluctuations and topologies change.
One of the fundamental plan requirements for every system is this. The most important ward component is delay. Military applications’ dormancy should be minimal for data movement for continuing UAV usage, such as chase and recovery operations. The inertness factor can be minimally negotiated for non-time fundamental applications, such as city design arranging and similar tasks.
UAV mobility plays an important role in UAV display. There are a few minor examples of ad-hoc network nodes. A moving example is a gathering or independent node. It is critical to determine whether moving examples of UAVs are feasible for completing tasks successfully and on schedule.
Because UAVs used in UAVs have limited consignment capability, they have particular limits. The weight of the equipment affects the presentation of UAVs; a modest payload extends the duration. As a result, a UAV with a lighter payload has more room for auxiliary assets such as sensors and other ancillary devices. Another constraint considered by UAV UAVs is space limitation.
In comparison to single UAV frameworks, multi-UAVs can improve overall system performance. Extending the number of UAVs in the system improves execution. The bigger the number of UAVs, the faster the mission will be completed and the more solid the system will be. Adaptability is important for time-sensitive applications.
In each UAV application, UAVs receive information from the environment using cameras and different sensors, and this information is relayed to the ground station over a multipath course. Information obtained in applications such as watching, salvaging, reconnaissance, and combat zones is fundamentally high-resolution video, photos, and sound. Similarly, captured information is vital and must be transmitted with rigorous postponement bounds. As a result, UAVs require a high transmission capacity asset to complete activities productively and on time.
Interoperable means to be operational and can be operated. To design such a UAV system, this can be interoperable with other networks and devices.
4 Broad Challenges in UAV Networks
UAV is a member of MANET. Because of its high node speed, rapid topology changes, and portable representations, it faces additional challenges in addition to the existing ones in MANET members. As a result of the discovery of these challenges and problems, the following areas have been identified as requiring extensive investigation.
UAVs form shared affiliations to maintain coordination and cooperation, which may be achieved by grouping. A single group is an excellent choice for comparable and minor balance tasks. When specific UAVs must do many functions, the need for multi-group systems develops. The CH of each bunch oversees downlink correspondence and between-group correspondence in this configuration.
The term itself denotes network formation, which means the formation of the UAV network if one UAV fails to communicate with others. All the UAVs communicate in a swarm fashion, and when one UAV stops communicating with others, the remaining UAVs start communicating with the other nearest UAVs, which can lie within the data transmission range. In this sense, each UAV works as a router for the next UAV to transfer the data further. If any interruption occurs in the drone systems, the remaining drones can communicate in a swarm optimization and form the network to avoid interruption and stabilize the communication links. It is inextricably linked to the advancement of UAVs in multi-UAV systems. One of the significant challenges is dealing with many UAVs and a few stationary ground stations. A wide range of small-scale UAVs may be offered in various clever swarms. A self-contained UAV setup is one example of astute group development. UAVs can react to dynamic availability fluctuation through clever bunching. Following a disruption in the relationship, UAVs may self-sort to reconnect.
UAV routing differs from those of other explicitly designated systems families. It has a relatively high rate of node formation. As a result, the topology changes all the time. The most difficult test is to create an effective routing calculation that is ready to deal with high versatility hubs and must renew its directing table regularly as the topology changes.
One of the main difficulties UAVs address is ensuring data privacy, accessibility, and reliability throughout the correspondence between UAV-to-UAV correspondence and UAV-to-ground node correspondence. Because there is no physical security node, bargaining becomes straightforward in it. Because of the considerable topology changes, regulating dependencies between nodes is an extra test. Nodes often link and separate from the system in all aspects. Protected routing is another source of concern in UAVs.
In UAVs, UAVs transmit data such as GPS position, text, pictures, video, and audio. There must be several limitations when transmitting such data, such as having a high QoS, minimum end-to-end latency, and lower error rates.
4.6 Mobility and Placement of UAV
One of the major research concerns in UAVs is the optimal placement of UAVs. UAVs with varying capabilities and constraints are used for a variety of purposes. Smaller UAVs are designed to carry smaller payloads, such as a thermal camera, a single radar, a camera, and an image sensor. As a result, this is an open test to simplify the UAV scenario to minimize vitality, encouraging when the retrieved data is taking longer.
The applications of UAVs give highly critical information in many circumstances that need to be brought there within a certain deadline. As a result, network consistency should be quite good. This type may be defined using the best-delivered data.
4.8 Variable Communication Links
Most open and non-military human applications may now be accomplished with multi-UAV systems. The system can have several types of correspondence connections in multi-UAV frameworks, such as UAV-to-UAV and UAV-to-ground join. The key advantages of multi-UAV systems are consistent quality and survivability in adversity. The failure of a single UAV causes the system to update and maintain communication by employing alternative nodes.
4.9 Base Communication Technology
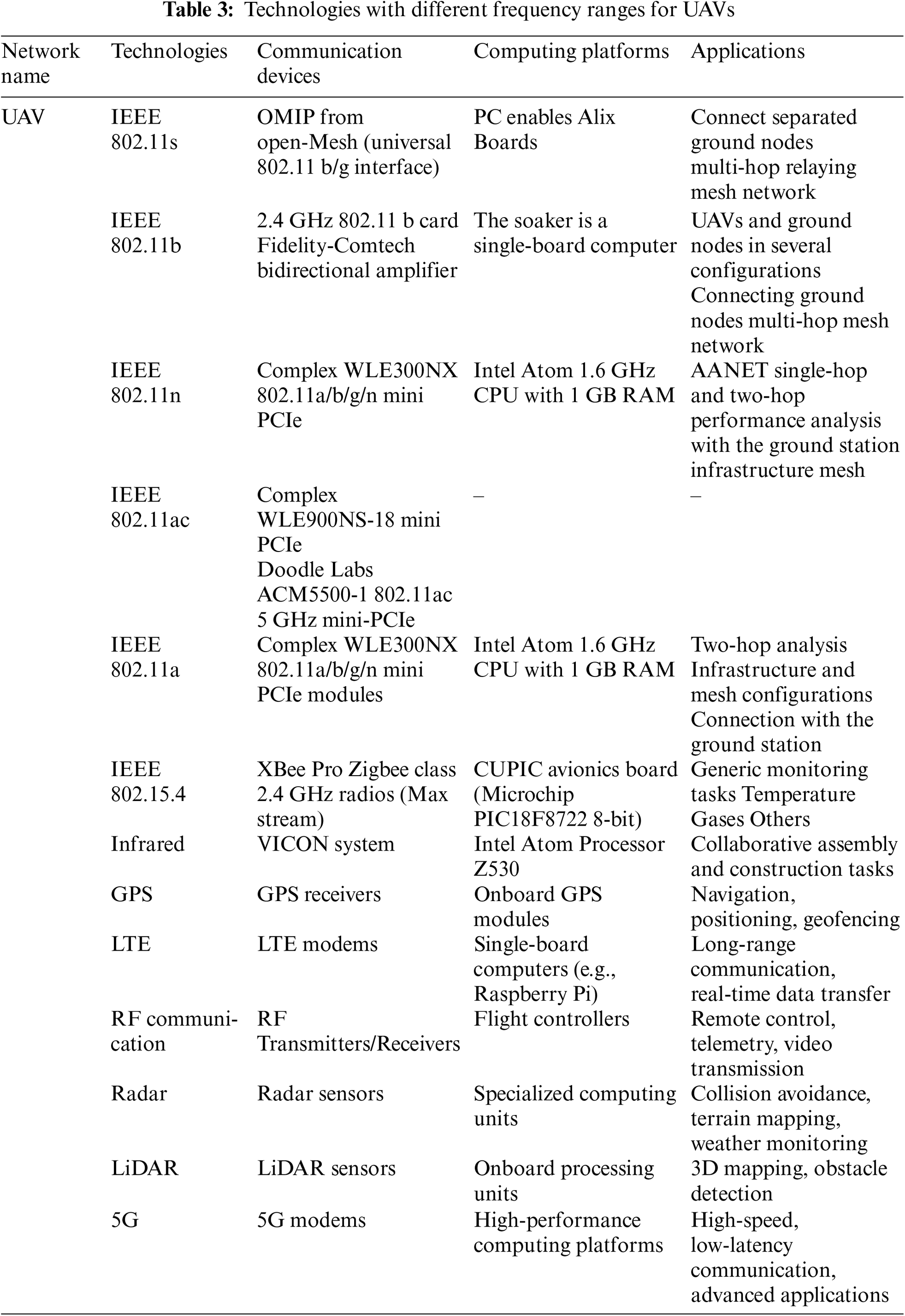
Different IEEE standard communication technologies are used for UAVs, such as 802.11 and 802.14.4. All these technologies depend on the type of network, which can be ad hoc or internet-based networks with central entities. Connect quality disparities emerge in UAV systems due to fluctuating separations among hubs and high mobility. For low data transfer in UAV-to-UAV communication, the IEEE standard 802.14.4 is used effectively. It could transfer the data in an ad hoc fashion network. The IEEE standard 802.11 is used for UAV-to-ground communication, which involves the centralized controlled internet facility. It can quickly transfer data and cover high-distance communication in 100–1000 km ranges. The MAC layer is installed in this terminology to manage UAVs’ issues and challenges during transmission, such as high bandwidth, high throughput, minimum delays, and low transmission loss ratio. UAVs have gained popularity for applications that do not require a human administrator or are too dangerous for human administrators. They operate on the IEEE S-Bands, the IEEE L-Bands, and the ISM bands. However, with recent technological improvements, new remote gadgets have been invented that also work on these groups. Different communication technologies used in UAVs are illustrated in Table 3.
4.10 Quality of Experience (QoE)
QoE in the context of drone and UAV systems refers to the overall satisfaction or dissatisfaction that users experience with the service these unmanned aerial vehicles provide. It is a holistic measure encompassing various aspects of service delivery and the interaction between users and the technology. In particular, QoE in Internet Streaming Video services is a critical metric used to assess the perceived quality of service from the end-user’s perspective [49]. This evaluation is crucial as it allows service providers to monitor service quality in real-time and make proactive improvements to enhance customer satisfaction before issues escalate into complaints or customer attrition. The components contributing to QoE include the quality of the network delivery system, the encoding and decoding processes of the video content, human factors such as user expectations and interaction interface, and the number of users or units sharing the network resources. Each factor shapes the overall user experience and satisfaction levels with UAV systems. Categories of QoE metrics are defined to quantify different aspects of user satisfaction. These include playback success, which measures the reliability of video playback without interruptions or failures; startup time metrics encompassing the time taken for the video to start playing; resume after seeking; and other related delays. Rebuffering metrics assess the frequency and duration of buffering events during playback, which can negatively impact user experience if not managed effectively. Additionally, video quality metrics evaluate the encoding quality of the streamed content, the resolution delivered vs. what is displayed to the user, and any issues, such as dropped frames, that may affect visual clarity and continuity. Understanding these metrics allows service providers to gauge the actual viewer experience accurately, align their services with audience preferences and tolerance levels, and make informed decisions about balancing quality with cost, time, and features.
To continuously improve QoE in UAV systems, conducting systematic experiments, gathering user feedback, and adapting technological advancements in video compression, network optimization, and user interface design is essential. By addressing these aspects comprehensively, UAV operators can enhance customer satisfaction and effectively drive the adoption and utilization of UAV technology across various applications. This approach underscores the importance of QoE as a strategic metric for optimizing UAV service delivery and ensuring positive user experiences in both commercial and operational contexts. Table 3 is regarding the frequency ranges and communication standards for UAV networks.
4.11 Data Processing Technologies
The widespread application of drones in fields such as aerial photography, surveillance, and rescue operations has generated a vast amount of data, but it also brings numerous storage challenges. Firstly, drones collect large volumes of data, especially high-resolution images, videos, and sensor data, requiring storage devices with large capacities. Secondly, as drones typically carry multiple sensors and devices, the diverse types of data they collect make managing and integrating these multi-source data complex. Data security is also a significant concern, as drones may collect and process sensitive or private information, necessitating ensuring secure storage, transmission, and data processing to prevent leaks and unauthorized access. Moreover, certain applications require real-time data, necessitating drones to collect, transmit, and process data in real-time for timely decision-making and response actions. Furthermore, drones may encounter environmental and operational constraints during missions, such as weather conditions, flight areas, and battery life, which may affect data collection and storage. Therefore, addressing these challenges requires consideration at the design and planning stages and the comprehensive integration of technological, managerial, and policy factors.
4.12 Routing Protocols for UAVs
The routing protocols are rules with the qualities and features governing the data communication process. Different routing protocols are used for communications, such as energy routing protocols, node scalability routing protocols, and link stability routing protocols [50]. All these routing protocols are divided into different classes, such as hybrid, reactive, proactive, and geographic-based. UAVs used different classes of routing protocols for the sake of communications, and these are all illustrated in Fig. 14.

Figure 14: UAV routing protocol’s taxonomy
Hierarchical routing protocols in UAV systems organize nodes into clusters or hierarchies to improve scalability and manageability. These protocols are designed to simplify the routing process by structuring the network to reduce the complexity of routing decisions. By forming clusters, each cluster head can manage the communication within its cluster, reducing the overhead for the entire network. Examples of hierarchical routing protocols include EHSR, CA, MPCA, MMT, and DTM. These protocols are particularly useful in large networks where managing individual node connections can be impractical. Energy-based routing protocols focus on optimizing energy consumption to prolong the lifetime of UAVs. These protocols aim to minimize the energy required for communication, which is crucial for UAVs often limited by battery capacity. By selecting routes that consume the least energy, these protocols help extend the operational time of UAVs. Examples of energy-based routing protocols include IEE-DLSA, EPLA, CBLADSR, EALC, and IMRL. These protocols are vital in scenarios where UAVs must operate for extended periods without recharging or battery replacement.
Swarm intelligence-based routing protocols use techniques inspired by the collective behavior of social insects like ants and bees. These protocols leverage the principles of swarm intelligence, where simple agents collectively solve complex problems. For instance, ants find the shortest path to food by leaving pheromone trails that guide other ants. Similarly, swarm intelligence-based routing protocols use collective behaviors to optimize routing paths in a dynamic network. Examples include APAR, BeeAdHoc, AntHocNet, and POSANT. These protocols are particularly effective in highly dynamic environments where network topology frequently changes.
Heterogeneity-based routing protocols consider the heterogeneity in UAV capabilities, such as different energy levels and computational resources. These protocols are designed to take advantage of the diverse capabilities of UAVs, ensuring that each UAV’s strengths are utilized effectively. By considering the heterogeneity of the network, these protocols can improve the overall efficiency and performance of the UAV system. Examples include DPTR, XlieGO, UVAR, and CRUV. These protocols are essential in networks with UAVs of varying capabilities, ensuring each UAV contributes optimally to the network. Topology-based routing protocols rely on the network topology to make routing decisions and are further categorized into reactive, static, proactive, and hybrid approaches. Reactive protocols, such as TORA, AODV, M-AODV, TS-AODV, and DSR, find routes on-demand when needed, reducing the overhead of maintaining a complete routing table. Static protocols, like LCAD, MLHR, and DCR, use pre-determined routes, which can be beneficial in stable environments but less adaptable to changes. Proactive protocols, including DSDV, BATMAN, OLSR, and M-OLSR, maintain up-to-date routing information to all nodes, ensuring immediate route availability but with higher overhead. Hybrid protocols, such as DLSA, Co-DLSA, LSTDA, ZRP, HWMPR, and SHARP, combine reactive and proactive approaches to balance overhead and responsiveness. Position-based routing protocols use the geographical position of nodes to make routing decisions and are further categorized into reactive, proactive, and greedy approaches. Reactive position-based protocols, like MUDOR, ARPAN, and RGR, discover routes when needed using position information, ensuring efficient route discovery. Proactive position-based protocols, such as POLSR, AeroRP, GRAA, and ABPP, continuously update routes based on position, providing immediate route availability. Greedy protocols, including GRG, GPMOR, MPGR, GLSR, and GPSR, forward packets to the node closest to the destination, minimizing the path length and reducing latency. These protocols are particularly effective in UAV networks where the positions of nodes are constantly changing, ensuring that routing decisions are always based on the most current information. Each category of routing protocols has unique characteristics tailored to different operational scenarios and requirements in UAV systems. The protocol choice depends on network size, node mobility, energy constraints, and specific application requirements. By selecting the appropriate routing protocol, UAV systems can achieve efficient, reliable, and scalable communication.
4.13 UAVs Existing Wireless Communication Technologies
A variety of current wireless technologies are used in UAVs. These all consume less energy, and almost all communicate using the ISM-Band. Wireless communication technologies such as Wi-Fi, Bluetooth, XBee, WiMAX, LTE, 5th G, and SATCOM are used. A detailed discussion of all these is given as follows:
Wireless-Fidelity (Wi-Fi) IEEE 802.11: Wi-Fi is most frequently used in communication scenarios when the communication is wireless. The IEEE bands such as 802.11n and 80.11ac can gain the best functionalities within a network. Two n versions have different features, including cyclic delay diversity, high transmission, Orthogonal Frequency Division Multiplexing (OFDM), Multi Input Multi Output (MIMO), and space-time block coding. Using these can increase the network throughput, bandwidth, and speed of the link up to 150 mbps, and it can also increase the distance coverage up to 250 m in an outdoor environment. In the AC version, the best feature is the Multi-User (MU-MIMO), enhanced throughput, dependable modulation, and overcoming limitations in future communication networks. The rate is up to 6.78 Gbps. Apart from this, the AC version can maintain a limited communication range of up to 100 m and can maintain the mobility of the nodes. In UAV-to-ground communication, the n version can divide the data from the sensor nodes in a communication scenario. Precision agriculture applications technology is efficiently used in UAVs via Wi-Fi and can overcome 3-D construction, forestry, frame rate, image quality, and acceptable low delay. The Wi-Fi technology and standards are also used in UAVs for Incident Management Systems (IMS); the UAVs can overcome disaster prevention and observation, such as fire sabotaging buildings and gas leaks.
Bluetooth (IEEE 802.15.1): Bluetooth technology is the most used IEEE standard 802.15.1 technology, and it is used in many devices because of its easy installation and easy deployment at a low cost. This unlicensed technology uses the 2.4 GHz frequency band, ranging from 10 to 200 m. However, the most extreme information rate may reach 24 Mbps. The Bluetooth Special Interest Group (SIG) proposed Bluetooth Low Energy (BLE) with the specifications of Bluetooth 4.0. The Bluetooth 5 is another version focusing on speed and collaboration and includes additional short-term inventions. Also, the Bluetooth 5 Also has the ability and features of communication for high-rate data transfer. Equipped with the UAV, the majority of the remote-controlled drones are using Bluetooth technology after 4.0 versions. The Bluetooth 5 has advanced flow control organization and low effort in the future’s UAV.
XBee (IEEE 802.15.4): The XBee is a radio waves technology introduced in 2005, with the development of the band named Max-Stream, the IEEE standard 802.15.4 band. This was designed for the star interchanges and point-to-point communication in which the clear LoS occurs. It has no proper symbol but has an antenna-type device. It can transfer data in the range of 250 kbps and is designed to be near communication systems. When the distance and size of the data increase, this technology suffers because it cannot provide such activity. Equipped in the UAV, this technology can be utilized effectively when there is clear LoS and minimum distances between the nodes of the UAV to the UAV and the ground station. Two versions are used: one is the simple XBee, and the other one is the XBee-Pro with 900 hp, which can be utilized as a remote component module. It can transfer the data from the UAV to the UAV and the ground station with high bandwidth and high throughput. In disaster situations and easy installation in emergencies, the XBee technology is used. This bi-directional connection sends telemetry data from UAVs to ground stations and controls data in the opposite direction.
WiMAX (IEEE 802.16): Worldwide Interoperability for Microwave Access (WiMAX) is used in long-distance communication devices that can communicate over miles. It uses the IEEE standard 802.16 bands with negligible interference, high data rates, and high throughput over long distances. Symbolic representation of WiMAX. This technology standard can be best used in areas where terrain and other mountains can cause signal interruption, path loss, or transmission loss. It has been considered the best because of its high bandwidth, easy installation, safety, high QoS, and paving high distances, and it is introduced in both unlicensed and licensed versions. During emergencies such as terrorist attacks or natural disasters, a network based on WiMAX and UAV technology may be introduced and implemented. This technology standard may be embedded in UAVs to allow them to communicate with ground stations and one another. Some UAVs are deployed over disaster-prone areas with the help of a wireless mesh network as a backbone that allows for emergency communication.
Long-Term Evolution (LTE)/4G: The LTE, also known as the 4th Generation wireless network, has witnessed high-speed internet facilities over the last decade and is expected to increase mobile network traffic to 403 exabytes per month by 2029 [51]. It can cover long distances with high bandwidth over the communication link. Internet-based UAVs use LTE technology, especially when they must cover a distance of up to 1000 km or more. The US military uses the LTE for drone communication; one is the Reaper-1 drone, which can cover more than 1000 km of distance by connecting with the base station. The LTE can work with HSPA and previous systems to provide full-speed vehicles. The LTE standard preserves low inertness, long separation, high portability, and all the requirements for automaton communication. It must, in any case, be used in authorized groups. In LTE/4G systems, a swarm of UAVs outfitted with cell technology can accidentally offload traffic into neighboring cells.
Fifth Generation and Six Generation (5G/6G): The fifth generation, simply 5G, is the updated and enhanced version after the LET/4G. This is more advanced wireless communication technology compared to 2G (GSM), 3G Universal Mobile Telecom System (UMTS), and 4G (LTE/WiMAX). The highest throughput, highest bandwidth, and longest coverage distance for wireless communication technology has been 5G in the recent era. In most developed countries, 5G has been the best growth in the IT industry. The 5G was anticipated in early 2020 by the International Telecom Union (ITU). In recent years, the ITU has been working on 6G wireless communication technology. Introducing 5G in the UAV has been a great innovation in the recent age. It has too many capabilities to cope with and enhance the lifetime of the drones’ communication by enriching the quality of the links and speed and providing the maximum level of high bandwidth. It can cover long distances of up to thousands of kilometers with a high-speed data transfer rate. It was also anticipated that the speed of the 5G would be 100gbps with a limit of 1000 times. As a result of such high points, the 5G invention is prepared to take on an essential character in UAV communication frameworks, paving the way for new uses.
Satellite Communication: Satellite Communication, short for SATCOM, is the communication that takes place using artificial satellites in space. This technology is used to transmit electromagnetic signals to space stations from ground stations or satellites, as well as the other way around. SATCOM is considered the best way of communication, as it covers long distances from one continent to another. With the proper utilization of the SATCOM in the UAV, all the UAVs can communicate effectively. Different frequency bands are used in SATCOM for different purposes, such as weather forecasts for the military and television broadcasting bands. The most common band used is the c band in SATCOM. Others are also used but for specific purposes. The armies use the X band for communication, with the 7 GHz for downlink and 8 GHz for uplink. Likewise, the Ku band operates at 11–12 GHz for downlink and 14 GHz for uplink speed. The UAV system can undergo many issues, including the lack of clear LoS. Proper usage of the SATCOM in the UAV will cover the issue of LoS and will have the ability to increase the network performance.
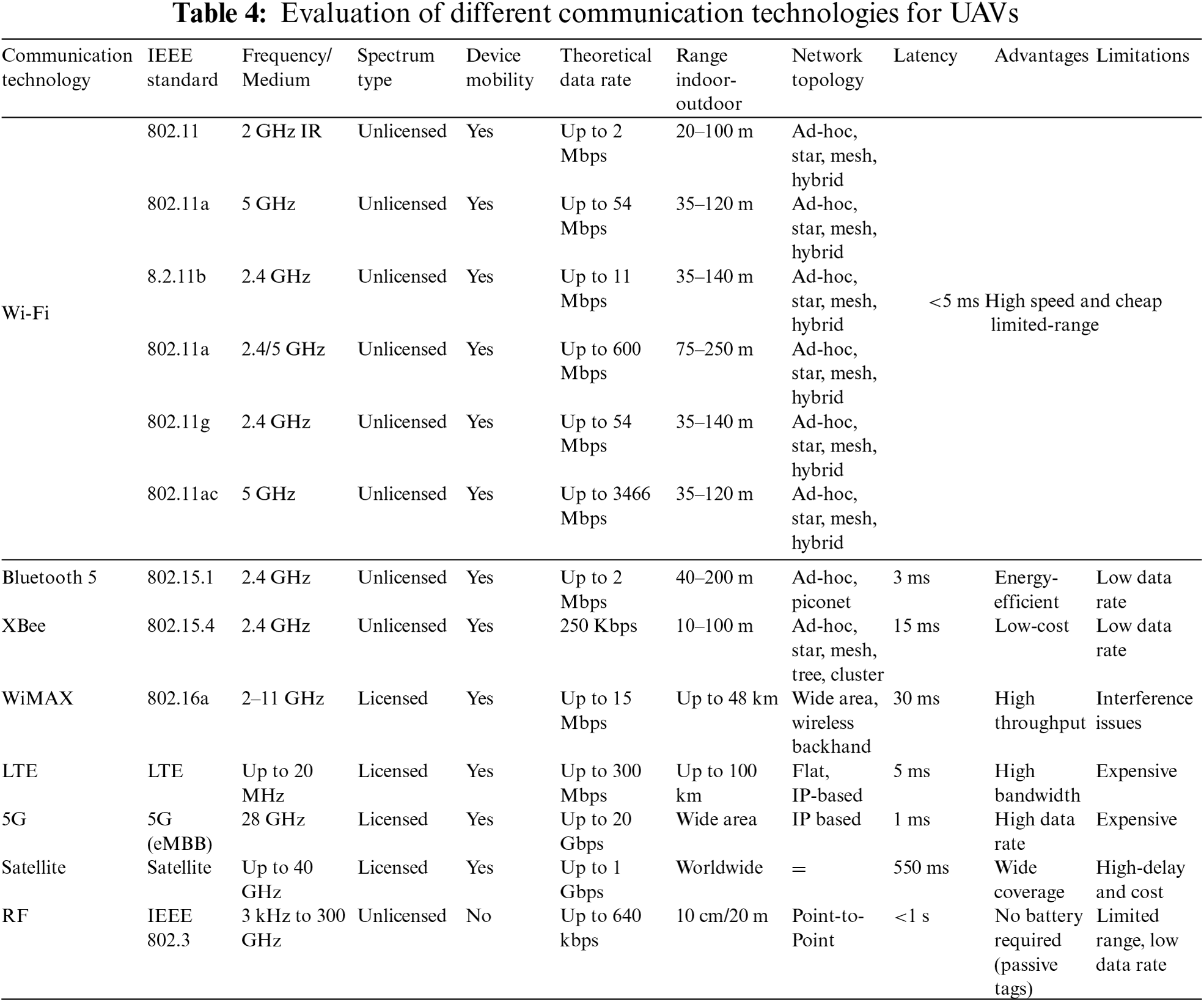
Radio Frequency (RF): Combining cutting-edge technologies, drones’ radio frequency (RF) transmission capabilities continually evolve to meet increasingly complex application demands. Advancements such as multi-band RF technology enable drones to achieve more stable and reliable data transmission by utilizing multiple frequency bands simultaneously. At the same time, adaptive modulation and coding techniques dynamically adjust signal modulation and encoding based on channel conditions for optimized performance. Wideband RF technology provides greater channel bandwidth, supporting higher data rates and lower latency for real-time video streaming and large-scale data transfer tasks. Moreover, Multiple Input Multiple Output (MIMO) and Software Defined Radio (SDR) enhance drones’ RF communication capabilities by improving signal reliability, coverage, and adaptability to diverse communication standards and protocols. These innovations empower drones with enhanced RF transmission performance, offering greater flexibility and reliability across various applications. Based on the discussion above, it is reasonable to assume that short-range communication technologies such as Bluetooth, XBee, or Wi-Fi may be considered for medium-range UAV applications, depending on the range and bandwidth requirements. However, if the inclusion zone is vast and these short-extend advancements cannot meet the required throughput requests, long-ago communication novelties, for example, SATCOM, 5G, LTE, and WiMAX, may be more appropriate. Extensive illustrations with ranges of these are given in Table 4. The transient improvements were used due to their transmission characteristics since there are good reasons for choosing them: they operate in an unlicensed spectrum, don’t require extreme LoS, and present a reasonable information rate and inclusion. In addition, they might be coordinated well with a small UAV. The greatest option among the short-range remote advances is Bluetooth 5, notable for its speed, control utilization, limit, and inclusion improvements.
5 Key Challenges in UAV Transmission Systems
The transmission systems for UAVs are critical components that enable the communication and control necessary for their autonomous operations [52]. These systems face unique challenges due to the nature of aerial environments and the requirements for real-time, reliable communication [53]. UAVs require low-latency and low-delay communication, especially for real-time control and data transmission, such as 3D point cloud video transmission [54], NLP, Transformer, encoding, and decoding [55]. Real-time data transmission is essential for accurate activity timing, necessitating low-latency communication protocols and edge computing.
High-definition (HD) and Ultra HD (UHD) video and sensor data require substantial bandwidth, necessitating the use of high-bandwidth communication technologies like 5G, mmWave, and advanced antenna systems [56]. Reliable and accurate data transmission without duplication is crucial for real-time video transmission in UAV systems [57]. Multi-link communication systems, mesh networks, and error correction protocols are suggested to ensure reliable communication in diverse environments [58].
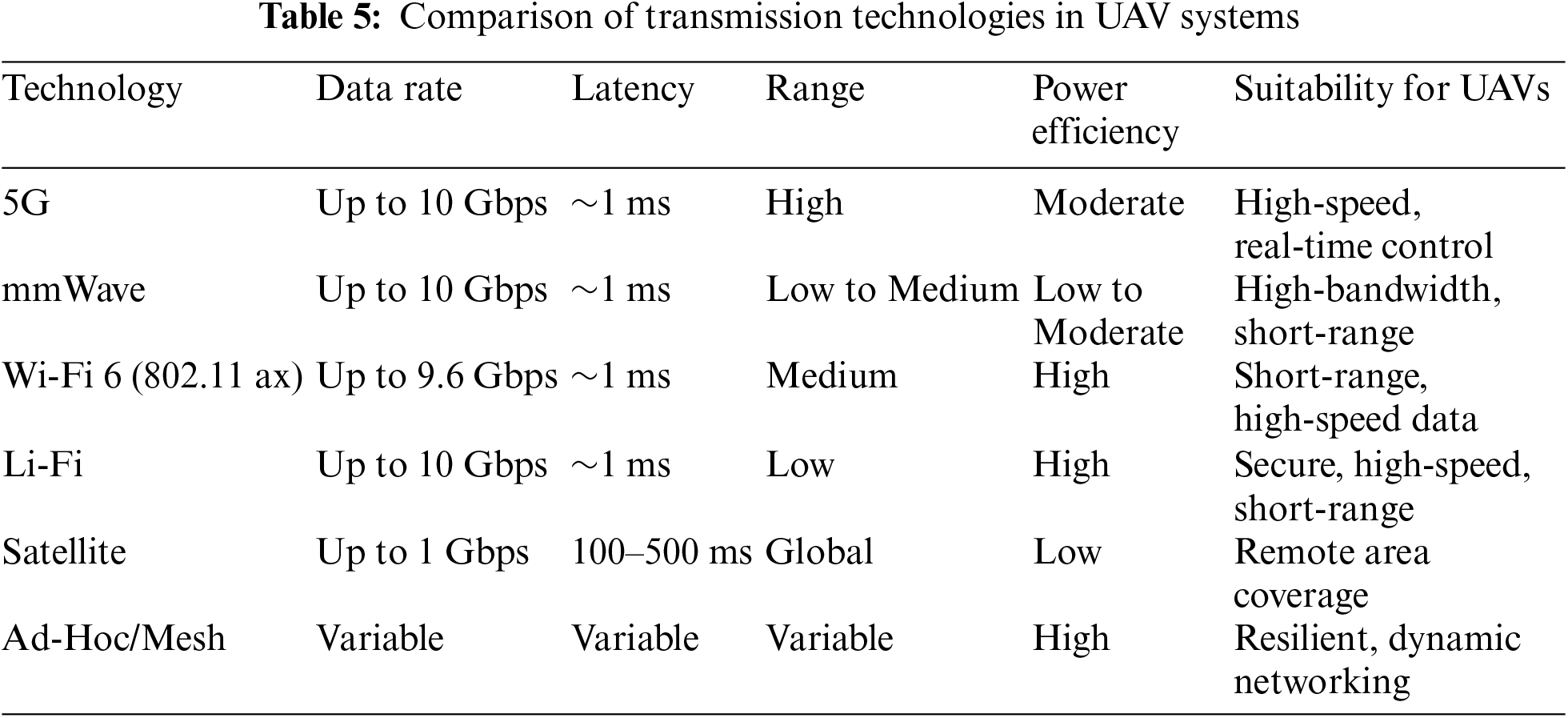
Energy efficiency is critical due to limited battery power in UAVs, restricting operational time [59]. Developing energy-efficient communication hardware and algorithms is recommended to address this issue [60]. Signal interference caused by attenuation, noise, and distortion, as well as vulnerabilities to interference and cyber-attacks, can be mitigated through the implementation of secure communication protocols and interference mitigation techniques [61]. Tables 5–7 compare different transmission technologies in UAV systems.
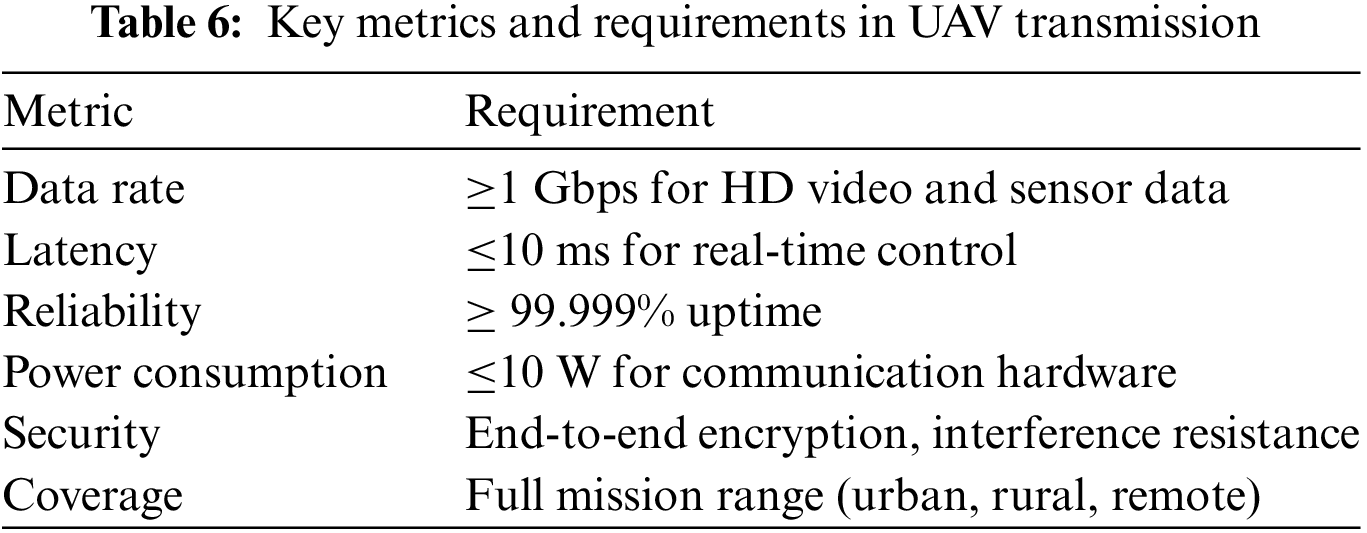
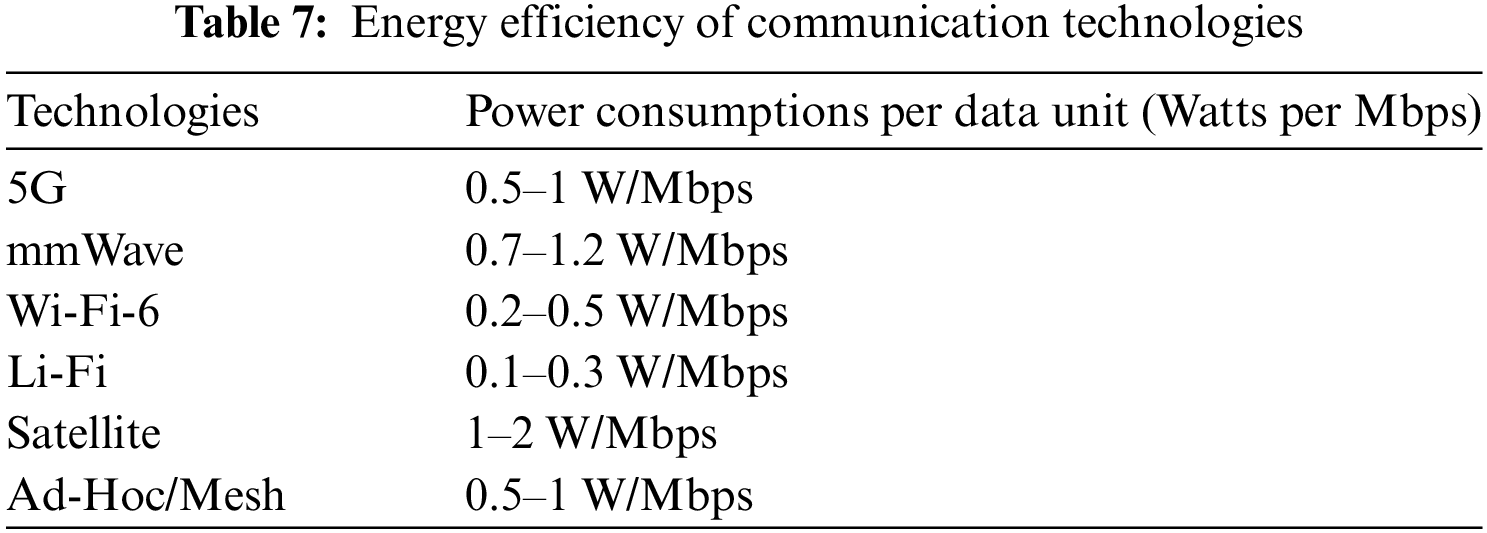
The transmission systems for UAVs must address multiple challenges, including latency, bandwidth, reliability, power efficiency, and security. Advances in communication technologies like 5G, mmWave, and Li-Fi are pivotal in overcoming these challenges. Developing energy-efficient and secure communication protocols is essential to successfully deploying autonomous UAV systems in various applications. By understanding these challenges and leveraging the right technologies, UAVs can achieve more reliable and efficient communication, making them more capable of performing complex autonomous operations in diverse environments, especially when using the 3D point cloud LiDAR approach.
5.1 AI, ML, DL, and IoT-Enabled UAV Systems with 6G and Beyond
Integrating IoT, ML, AI, and DL into UAV/drone systems is revolutionizing various industries. With the advent of 6G technology, these capabilities will be significantly enhanced, providing unprecedented autonomy, connectivity, and performance. AI empowers drones, also known as UAVs, with autonomous decision-making capabilities [48,62]. By processing data from various sensors, AI can help drones navigate, avoid obstacles, and perform complex tasks without constant human intervention [63]. Some key features of AI in UAV systems include autonomous navigation, object recognition, and predictive maintenance [64]. In addition to AI, ML algorithms are also being integrated into UAV systems to enable drones to learn from data and improve their performance over time [65]. This involves training models on large datasets to identify patterns and make predictions. Key features of ML algorithms in UAV systems include data analysis, pattern recognition, and behavior prediction [66]. DL, a subset of Machine Learning, involves using neural networks with many layers, known as Deep Neural Networks (DNNs), to model complex patterns in data [67]. DL algorithms in UAV systems are particularly useful for image and video analysis, natural language processing, and advanced object detection [68]. The IoT framework connects drones to various devices and systems, enabling real-time data exchange and control [69]. Key features of IoT-enabled UAV systems include real-time data collection, remote monitoring and control, and inter-device communication [70]. The next generation of wireless communication, 6G, promises to significantly improve UAV systems’ latency, data rates, connectivity, and security [71]. Tables 8 and 9 compare AI, ML, DL, and the impact of 6G in UAV networks.
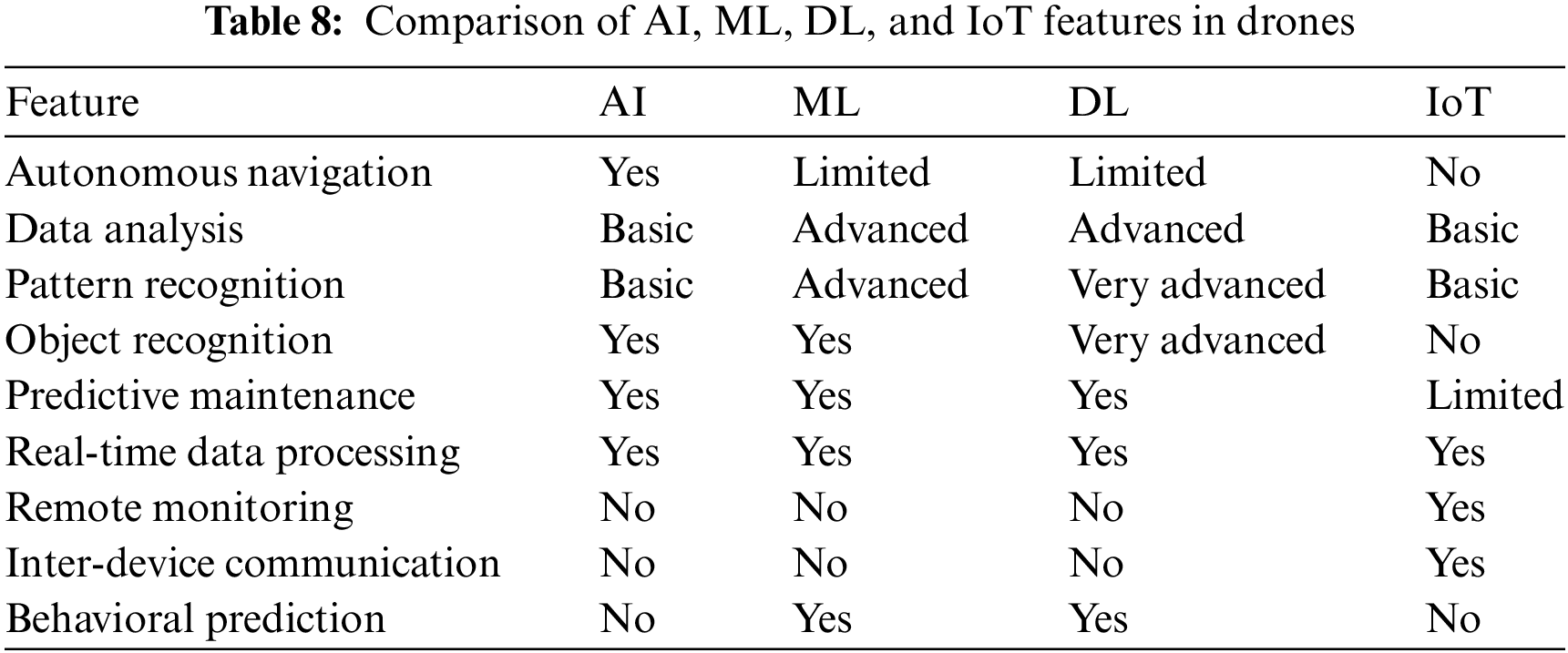
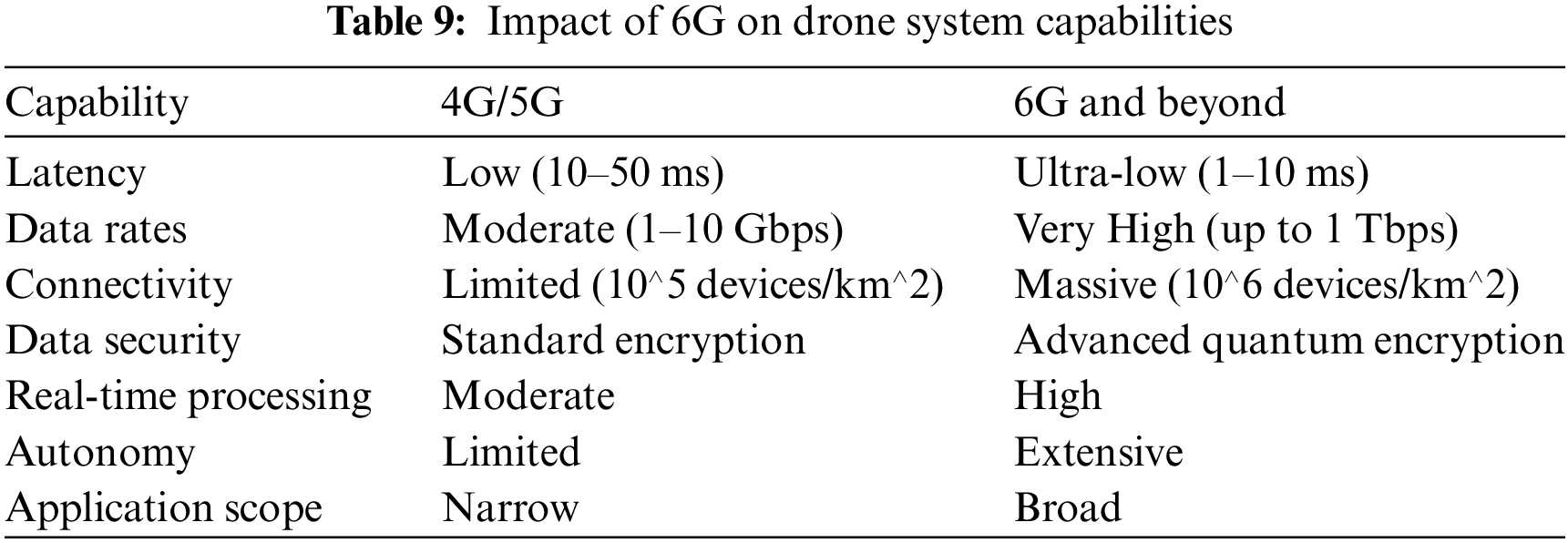
The convergence of AI, ML, DL, and IoT with 6G technology will significantly enhance the capabilities of drone systems, leading to more autonomous, efficient, and versatile applications across various sectors. As 6G technology matures, it can be expected to see even more innovative and impactful uses of drones, transforming industries and everyday life.
5.2 Security Measures in UAV Systems
UAVs, commonly known as drones, require robust security measures to ensure safe and reliable operations [72]. These security measures can be broadly categorized into physical, communication, data, and operational security.
Physical security for UAVs is a critical first line of defense. Anti-tampering mechanisms help ensure adversaries cannot easily modify the UAV hardware [73]. Using techniques like signal authentication, GPS spoofing protection prevents false GPS signals from misguiding the UAV [74]. Anti-jamming techniques, such as frequency hopping and spread spectrum, make it difficult for attackers to jam the UAV’s communication signals [75]. These physical security measures collectively help secure the UAV platform against various attacks.
Communication security is paramount for UAVs, as the data links between the UAV and the control station must be protected. Advanced encryption standards like AES-256 secure these communication links and prevent eavesdropping [76]. Mutual authentication mechanisms ensure the UAV and control station can verify each other’s identity, thwarting impersonation attempts [77]. Frequency hopping, where the transmission frequency is dynamically changed, makes it harder for adversaries to intercept the communications [78]. Data security is crucial for UAVs, which often collect and transmit sensitive information [59]. Data encryption, both in transit and at rest, safeguards the confidentiality of this data [79]. Secure digital storage technologies protect the data from unauthorized access [80]. Role-Based Access Control (RBAC) limits data access to only those users who require it, reducing the risk of data breaches [81]. These data security measures ensure the integrity and confidentiality of the valuable information gathered and processed by UAVs.
The multi-faceted security approach covering physical, communication, and data aspects is essential to protect UAV systems from various threats and vulnerabilities. By implementing these security controls, UAV operators can enhance the trustworthiness and reliability of their unmanned aerial platforms.
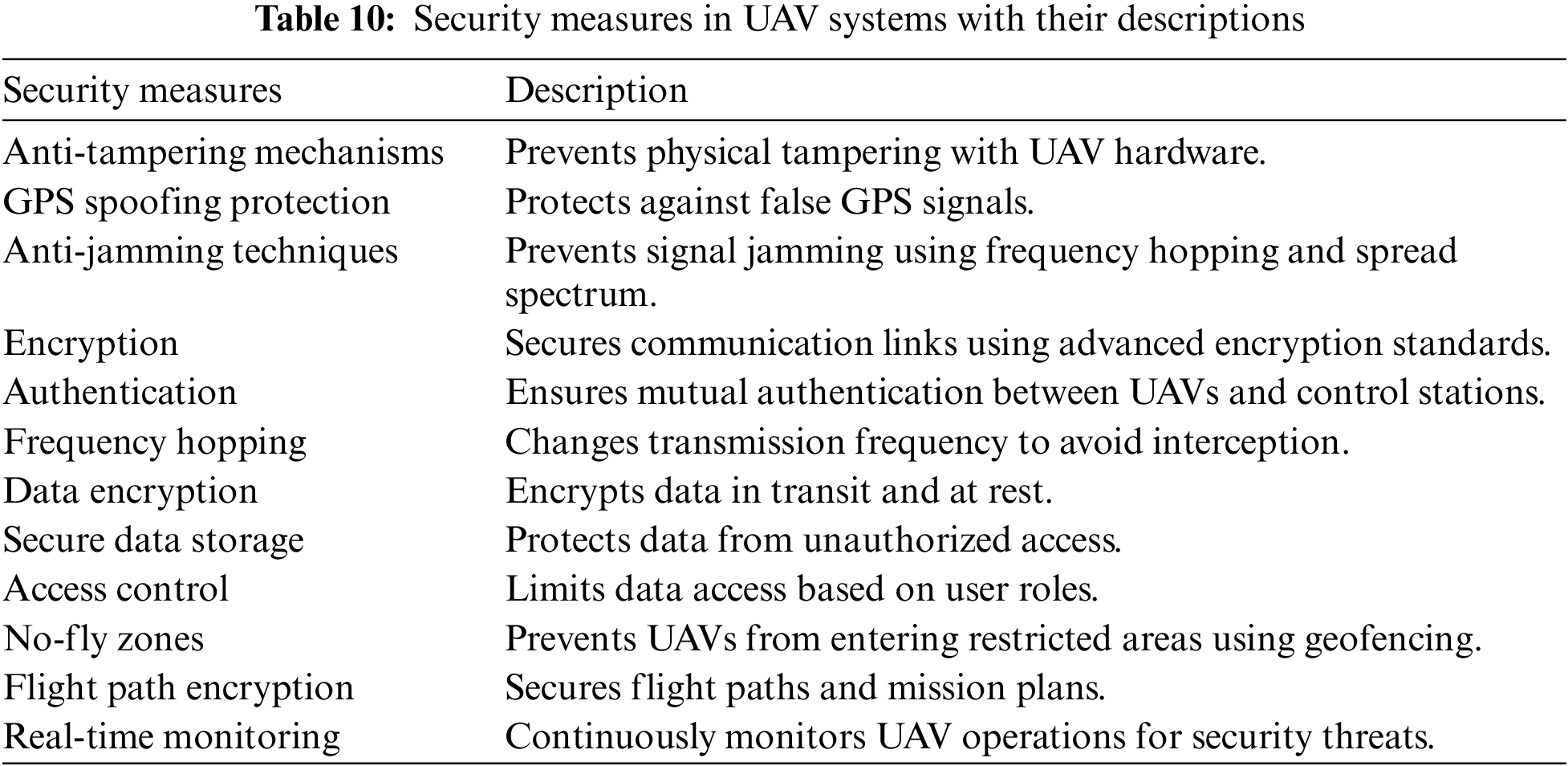
Operational security is critical to ensuring UAV systems’ reliable and responsible use. One key challenge is restricting UAVs from entering prohibited airspaces or no-fly zones. Geofencing technology can create virtual boundaries to prevent UAVs from straying into these restricted areas, including sensitive government facilities, crowded urban centers, or other off-limit locations. This helps mitigate the risks of using UAVs for unauthorized surveillance or disrupting critical infrastructure. In addition to spatial restrictions, securing UAVs’ actual flight paths and mission plans is paramount. Encrypting this operational data protects it from being intercepted or tampered with by adversaries. This ensures the integrity of the UAV’s intended activities and prevents malicious actors from altering the flight path or mission objectives without authorization. Continuous real-time monitoring of UAV operations is also essential for operational security. Vigilant monitoring allows for the rapid detection of any anomalous behavior or potential security threats. Operators can then quickly respond to mitigate these risks, whether it’s neutralizing a jamming attack, triggering emergency return-to-base protocols, or initiating other contingency measures. By addressing challenges related to no-fly zones, encrypted flight path data, and real-time monitoring, UAV operators can enhance the overall operational security of their unmanned aerial platforms. These measures help ensure UAVs are used responsibly, without compromising sensitive airspaces or mission objectives, and with the ability to react to emerging security threats rapidly. Table 10 is regarding security measures in UAV networks.
Blockchain is the latest technology that offers a decentralized, immutable, and transparent method to enhance security and management systems [82]. Applying blockchain technology in UAV systems ensures the following key benefits: Data Integrity: One of the primary advantages of using blockchain in UAV systems is the ability to ensure the integrity of the data collected by the drones. Blockchain technology provides an immutable record of all transactions, which means that any data recorded on the blockchain cannot be altered or tampered with. This is crucial for UAV applications, where the drone data may be used for critical decision-making or as evidence in legal or regulatory proceedings. By leveraging the immutable nature of blockchain, UAV operators can be confident that the data they are working with is accurate and trustworthy.
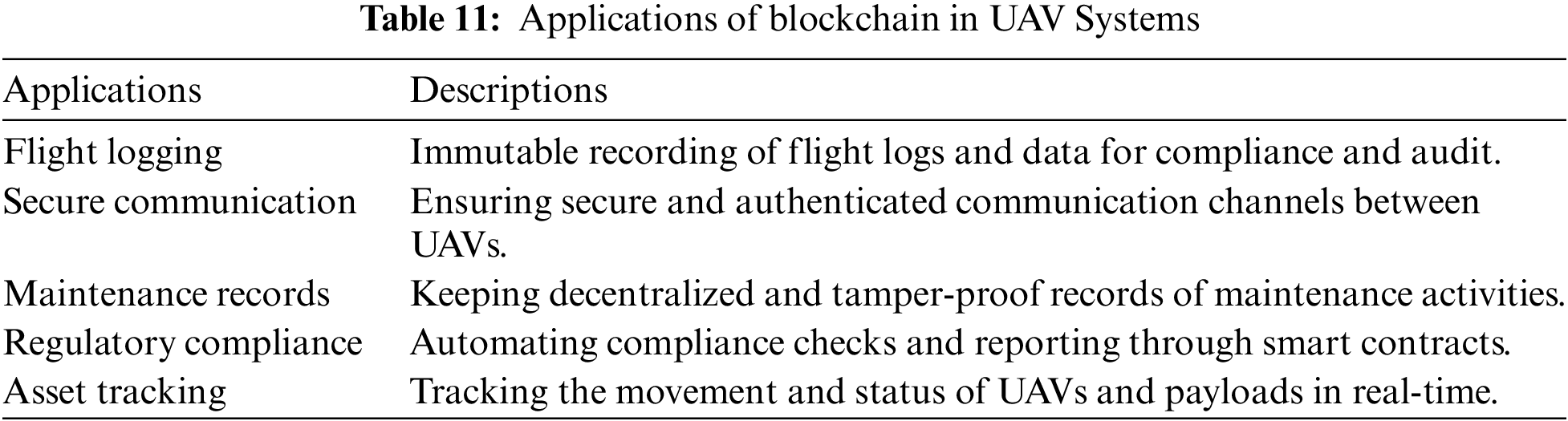
Decentralized Control: Traditional UAV systems often rely on a centralized control system, which can create a single point of failure. If the central control system is compromised or experiences a malfunction, the entire UAV network may be disrupted. By applying blockchain technology, the control of UAV operations can be decentralized, reducing the risk of a single point of failure. This decentralization is achieved using a distributed ledger, where multiple nodes in the network maintain a shared record of all transactions. If one node experiences an issue, the other nodes can continue to operate, ensuring the overall resilience of the UAV system. Enhanced Authentication: Blockchain technology can also enhance the authentication processes between UAVs and their control systems. The authentication process can be automated and secured using smart contracts, ensuring only authorized entities can access and control the UAVs. This is particularly important in scenarios where multiple parties (e.g., operators, service providers, and regulators) must interact with the UAV system, as it helps establish a trusted and verifiable chain of custody. Secure Communication: Another key benefit of using blockchain in UAV systems is securing communication channels. Blockchain-based networks can ensure that only authenticated nodes can participate, preventing unauthorized access and ensuring the data’s confidentiality. This is crucial in UAV applications, where sensitive information, such as flight plans, sensor data, or command signals, needs to be securely transmitted between the drones and the control systems—Table 11 regarding the blockchain systems and their applications in UAV networks.
Despite the advancements in UAV technology, several security issues and challenges persist, particularly in communication systems. Ensuring the security of UAV systems is critical for their safe and reliable operation. Implementing robust security measures, leveraging blockchain technology, and addressing existing security issues and challenges are essential to achieving this goal. By adopting these strategies, UAV operations can be more secure, efficient, and trustworthy. The above-detailed discussions and tables provide a comprehensive overview of the security measures, blockchain applications, and the security issues and challenges in UAV communication systems.
5.4 UAV-Enabled Systems in Medical Healthcare
Unmanned Aerial Vehicles (UAVs), commonly known as drones, are increasingly being integrated into the medical healthcare system. Their applications range from emergency response to routine delivery of medical supplies. Here’s a detailed discussion on UAV-enabled systems in medical healthcare, including tables for better understanding.
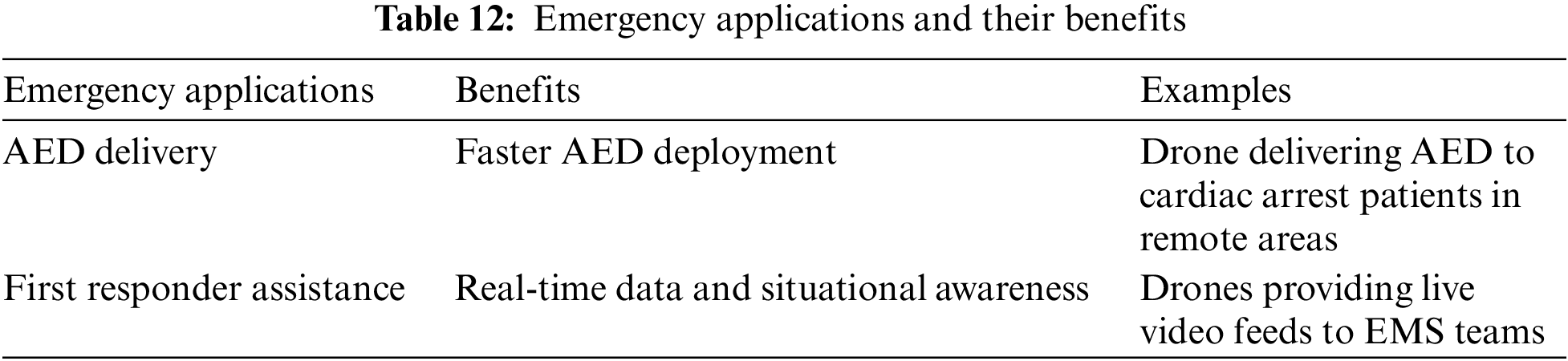
UAVs, or unmanned aerial vehicles (also known as drones), play a crucial role in enhancing emergency medical services (EMS) capabilities, particularly in remote or hard-to-reach areas. The major applications of UAV-enabled systems in healthcare EMS include Rapid Transport of AEDs: Drones can deliver Automated External Defibrillators (AEDs) to cardiac arrest patients much faster than traditional ambulances. This rapid deployment of life-saving equipment can significantly improve the chances of survival for those experiencing sudden cardiac emergencies. First Responder Assistance: Drones equipped with cameras and communication systems can provide first responders with real-time information about the situation on the ground. This can help first responders better assess the scene, coordinate their response, and provide more effective medical care. The major advantages of using UAV-enabled systems in healthcare EMS include reduced response times, which means that drones can reach patients in remote or difficult-to-access areas much faster than ground-based emergency vehicles, potentially saving critical minutes in life-threatening situations. Increased Survival Rates in Critical Conditions: The rapid delivery of AEDs and the improved situational awareness provided by drones can lead to higher survival rates for patients experiencing critical medical emergencies. Tables 12–17 discuss the UAVs embedded and applicable in the healthcare systems.

Drones also effectively deliver medical supplies, especially in areas with poor infrastructure. The major applications of UAV-enabled systems in healthcare’s medical supply delivery include the delivery of Medicines: Drones can be used to regularly transport drugs and vaccines to remote or underserved areas, ensuring timely access to essential medical treatments. Transportation of Samples: Drones can quickly and safely deliver lab samples, including blood and tissue samples, for analysis and diagnosis. The major advantages of using UAV-enabled systems in healthcare’s medical supply delivery include timely delivery in areas with poor road infrastructure, which allows drones to bypass difficult terrain and traffic and deliver medical supplies to areas that are hard to reach by ground transportation. Safe Transport of Temperature-Sensitive Medical Supplies: Drones can maintain the proper temperature and handling requirements for delicate medical items, such as vaccines and blood samples, during delivery.
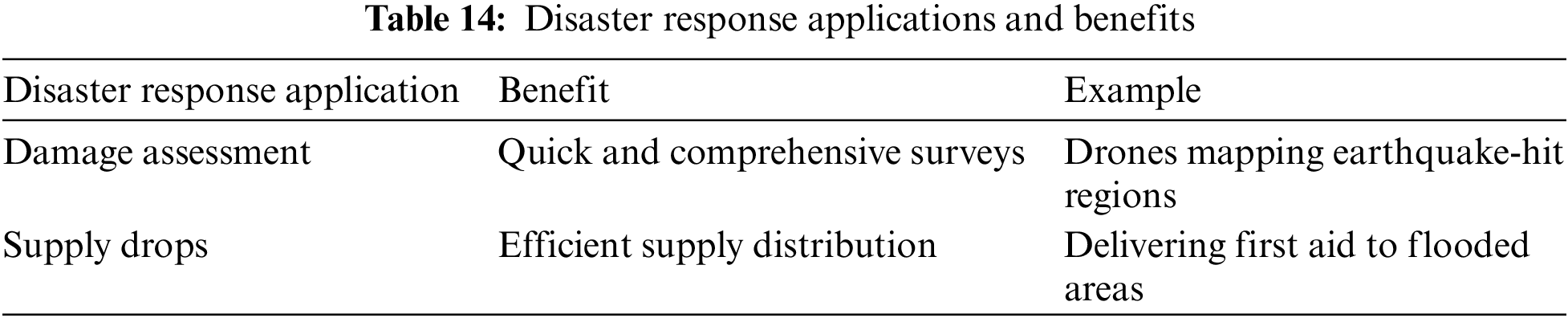
UAVs can significantly improve the effectiveness of medical services during natural disasters. The major applications of UAV-enabled systems in healthcare’s disaster response include damage assessment, which can quickly survey affected areas and provide detailed damage reports, helping emergency responders better understand the scale and scope of the disaster. Supply Drops: Drones can deliver medical supplies and other essential items to inaccessible areas by ground vehicles, ensuring that critical resources reach those in need.
The major advantages of using UAV-enabled systems in healthcare’s disaster response include the following: Swift Assessment of Disaster Zones: Drones can rapidly gather and transmit information about the extent of the damage, enabling a more coordinated and effective response. Efficient Distribution of Medical Supplies: Using drones, healthcare providers can ensure that crucial medical resources reach those who need them, even in the disaster’s most challenging and hard-to-access areas. Overall, the text highlights the growing importance of UAV-enabled systems in enhancing the capabilities and effectiveness of healthcare’s emergency medical services, medical supply delivery, and disaster response operations. Using drones in these areas can significantly improve patient outcomes and the overall efficiency of healthcare delivery, particularly in challenging or resource-constrained environments.
This section discusses how UAVs are utilized beyond emergencies, specifically in delivering routine healthcare services, particularly in remote or underserved regions. The key applications of UAV-enabled systems in routine healthcare services are as follows: Telemedicine Support: UAVs deliver telemedicine kits to remote patients, enabling them to receive healthcare services without physical access to a healthcare facility. Routine Lab Sample Transport: UAVs regularly transport lab samples for diagnostic purposes, improving the efficiency and timeliness of the sample delivery process. The major advantage of using UAV-enabled systems for routine healthcare services is enhanced healthcare access in remote areas: UAVs can provide healthcare services to individuals living in remote or underserved regions where access to traditional healthcare infrastructure may be limited. Improved Efficiency in Sample Transport: Using UAVs for sample transport can enhance the speed and reliability of the process, leading to more efficient diagnostic services.
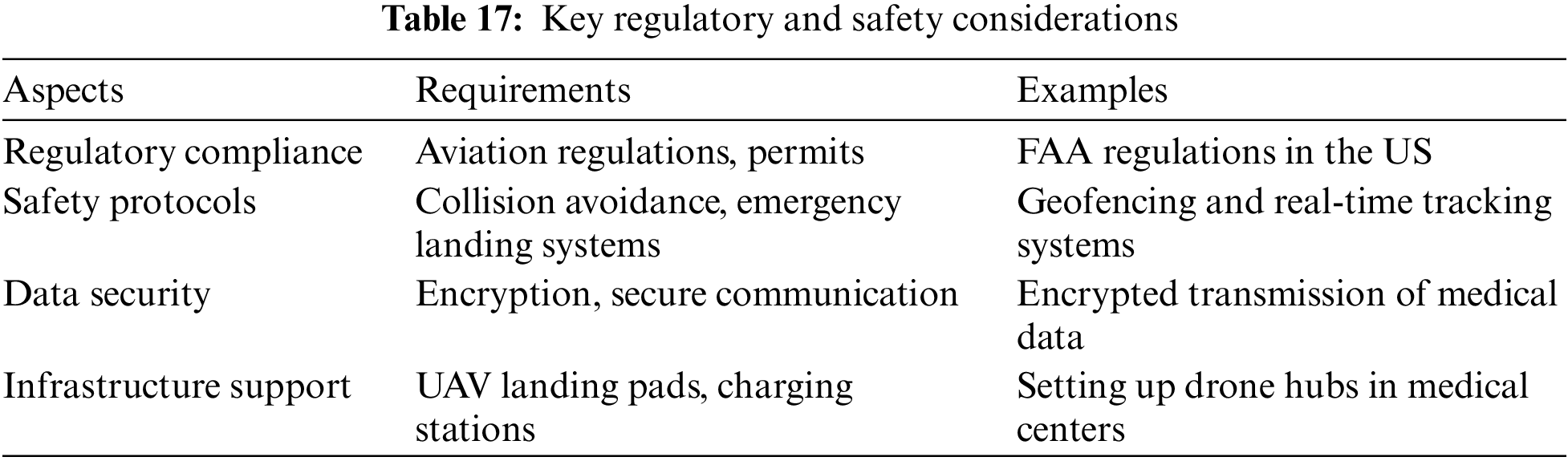
This section emphasizes the importance of establishing and adhering to regulatory frameworks and safety protocols to deploy UAV-enabled healthcare services effectively. Appropriate regulatory guidelines and safety measures must be in place to ensure the safe and responsible use of UAVs in healthcare. These may include regulations governing the operation and use of UAVs, such as airspace restrictions, pilot licensing requirements, and guidelines for maintaining airworthiness. Safety protocols to mitigate risks associated with UAV operations, including measures to prevent collisions, ensure payload security, and minimize potential harm to people or property. Adhering to these regulatory and safety considerations is essential for the successful and sustainable integration of UAV technology into routine healthcare services.
Integrating UAVs into medical healthcare systems offers significant potential to enhance medical services’ speed, efficiency, and reach. From emergency response to routine healthcare delivery, UAVs provide versatile and effective solutions, especially in remote and underserved areas. However, the success of these systems depends on robust regulatory frameworks, safety protocols, and infrastructure support.
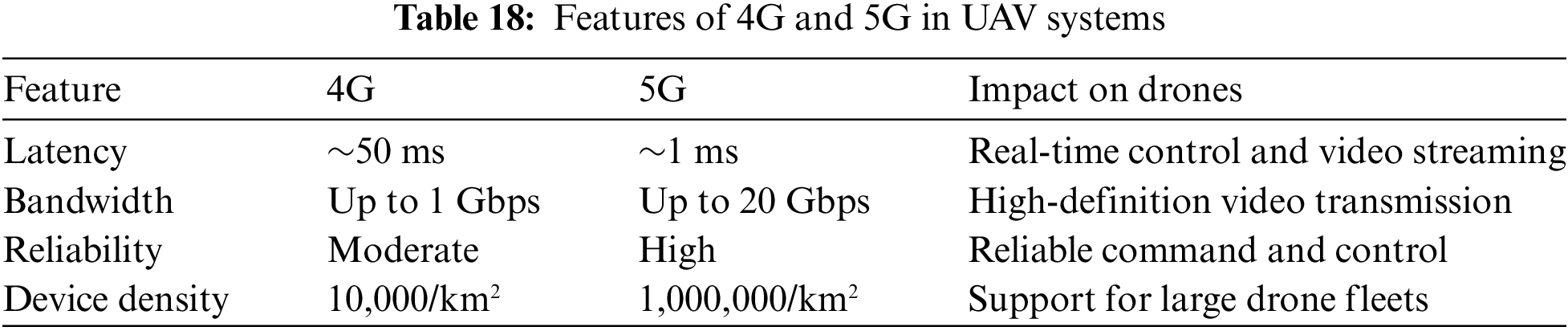
The future of drone communication systems is poised for significant advancements, driven by technological innovations, regulatory developments, and increasing applications across various industries. These UAVs will be the spiders in the sky flying autonomously with AI-enabled approaches. Technological Advancements: One of the cornerstone advancements discussed is the rollout of 5G networks, which promises to revolutionize drone communication. The transition to 5G is expected to provide ultra-reliable, low-latency connectivity, significantly enhancing the capabilities of drones. This upgrade enables real-time data transmission, enhances control mechanisms, and improves safety standards. With these improvements, drones can operate more efficiently and reliably in various environments, from urban areas to remote locations.
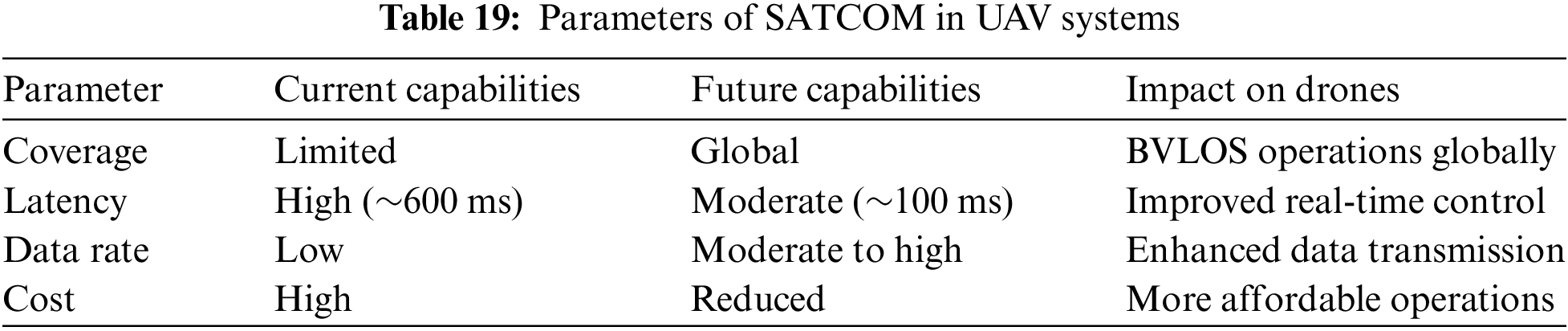
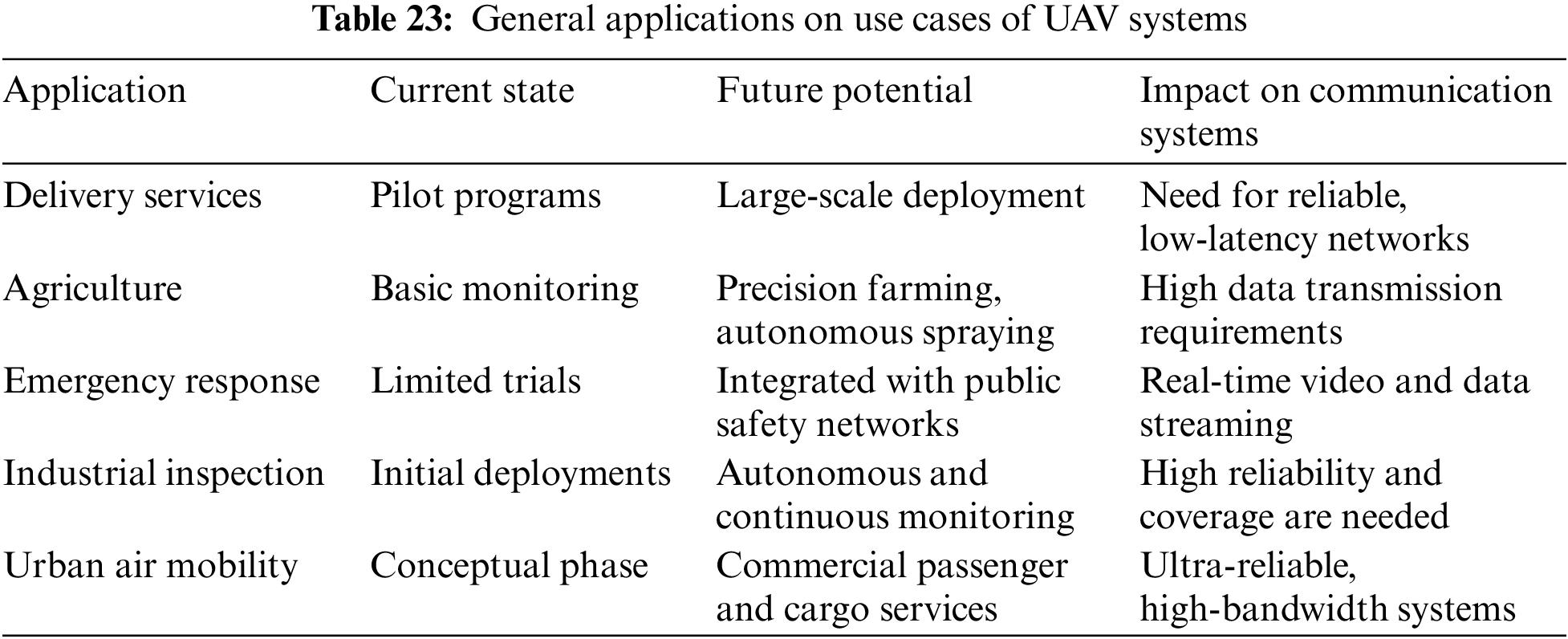
Additionally, satellite communication is another pivotal technology for drones, particularly in Beyond-Visual-Line-of-Sight (BVLOS) operations. In areas where terrestrial networks are sparse or nonexistent, satellites offer a crucial alternative, facilitating continuous connectivity and expanding the geographical reach of drone applications. This capability is essential for agriculture, forestry, and infrastructure inspection, where access to real-time data is paramount for decision-making and operational efficiency. Tables 18–23 are regarding the future scope of UAV networks.
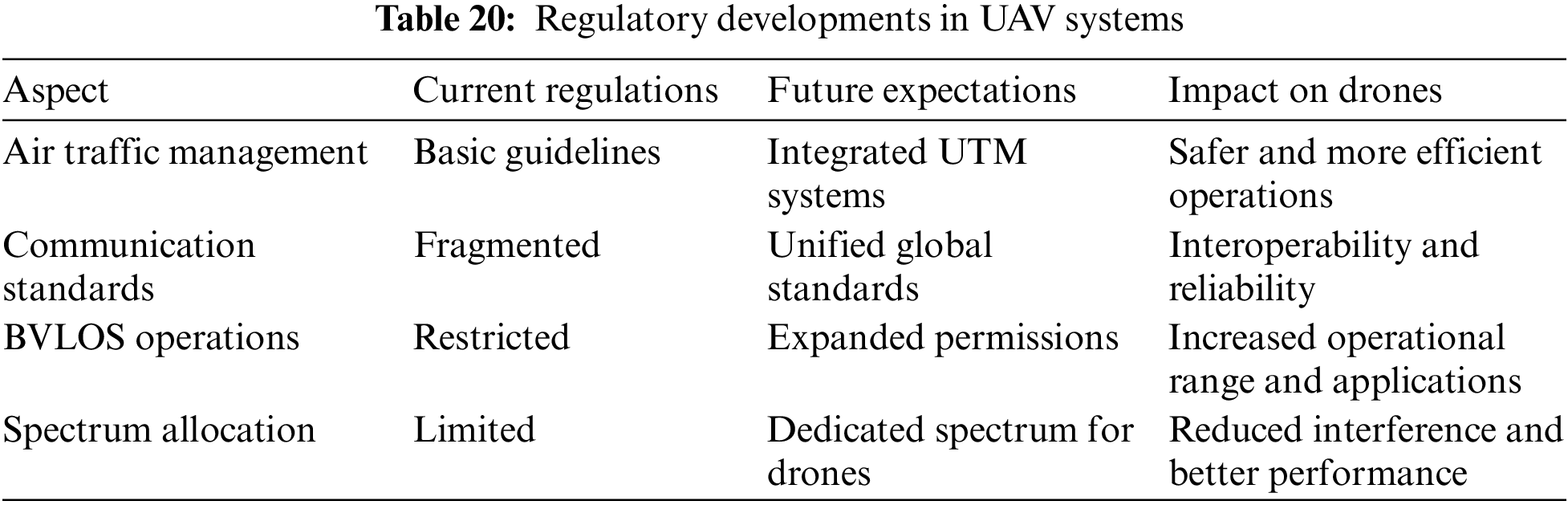
Regulatory Developments: Integrating drones into airspace necessitates robust regulatory frameworks to ensure safety and operational integrity. As drone usage proliferates, regulatory bodies are evolving to establish comprehensive air traffic management systems dedicated to UAVs. These systems are crucial for managing airspace congestion and ensuring compliance with safety protocols. Moreover, regulatory efforts are focused on defining communication protocols and standards that govern how drones interact with each other and with existing aviation infrastructure. This regulatory evolution is essential for fostering a conducive environment for widespread drone deployment across various sectors.
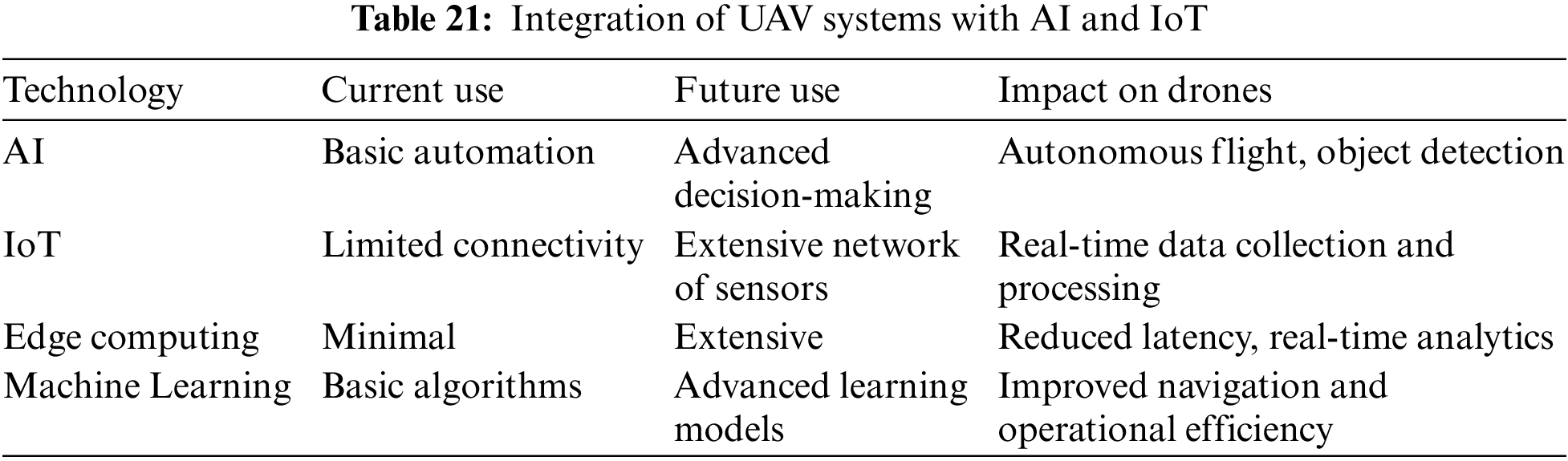
Integration with AI and IoT: AI and IoT technologies are poised to transform drone capabilities by enhancing communication systems and operational functionalities. The integration of AI enables drones to perform autonomous operations with improved decision-making capabilities, enhancing efficiency and reliability. IoT integration facilitates real-time data collection and analysis, enabling drones to perform tasks such as predictive maintenance and enhanced situational awareness. These advancements optimize drone performance and pave the way for innovative applications across industries, from logistics and transportation to public safety and environmental monitoring.
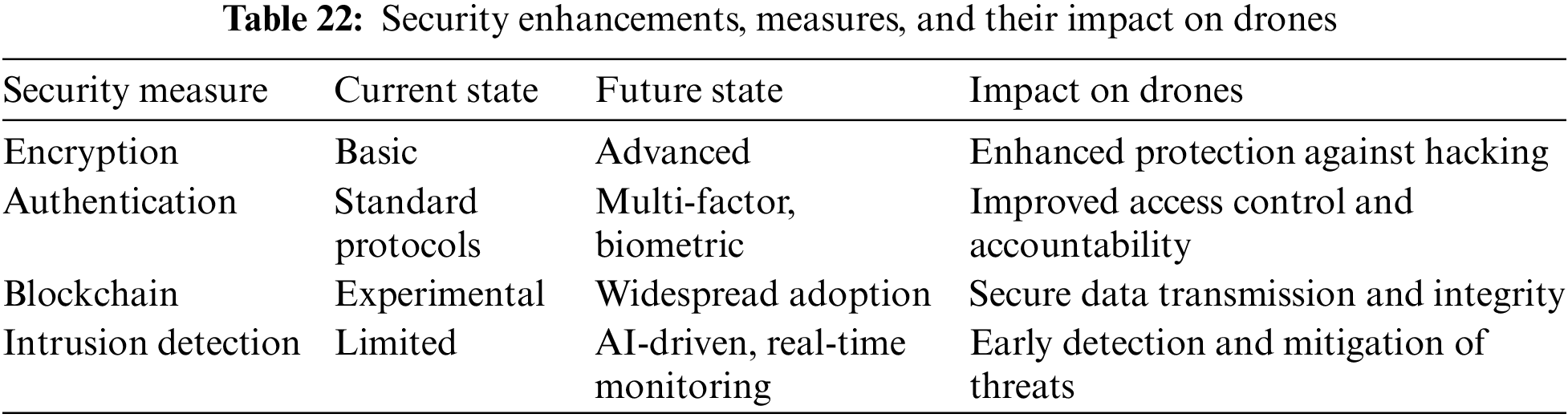
Security Enhancements: As drone deployment increases, ensuring communication channels’ security becomes paramount. Cyber threats pose significant risks to drone operations, potentially compromising data integrity and operational safety. Future drone communication systems must incorporate advanced encryption techniques and blockchain technologies to mitigate these risks. These security enhancements safeguard data transmission and protect against unauthorized access, bolstering trust and reliability in drone technology applications.
Applications and Use Cases: Looking ahead, the integration of robust communication systems will unlock a diverse range of applications and use cases for drones. Beyond traditional roles in surveillance and inspection, drones are poised to play pivotal roles in delivery services, emergency response, and disaster management. Enhanced communication capabilities enable drones to operate efficiently in dynamic and challenging environments, contributing to faster response times and improved outcomes in critical situations.
In the decision, the data underscores a transformative phase in drone technology characterized by technological innovation, regulatory evolution, and expanding applications. These advancements are set to redefine industries and societal norms, ushering in an era where drones are integral to every day operations across various sectors, supported by resilient communication systems and regulatory frameworks designed for safety and efficiency. The future of drone communication systems is shaped by advances in 5G technology, satellite communication, regulatory developments, integration with AI and IoT, and enhanced security measures. These developments will unlock new applications and significantly expand the operational capabilities of drones. By addressing the current limitations and leveraging emerging technologies, the drone communication landscape will evolve to support more complex, large-scale, and diverse applications, ultimately transforming various sectors such as medical healthcare, military, and everyday life.
6 Main Contributions of LiDAR 3D Point Cloud in UAV Systems
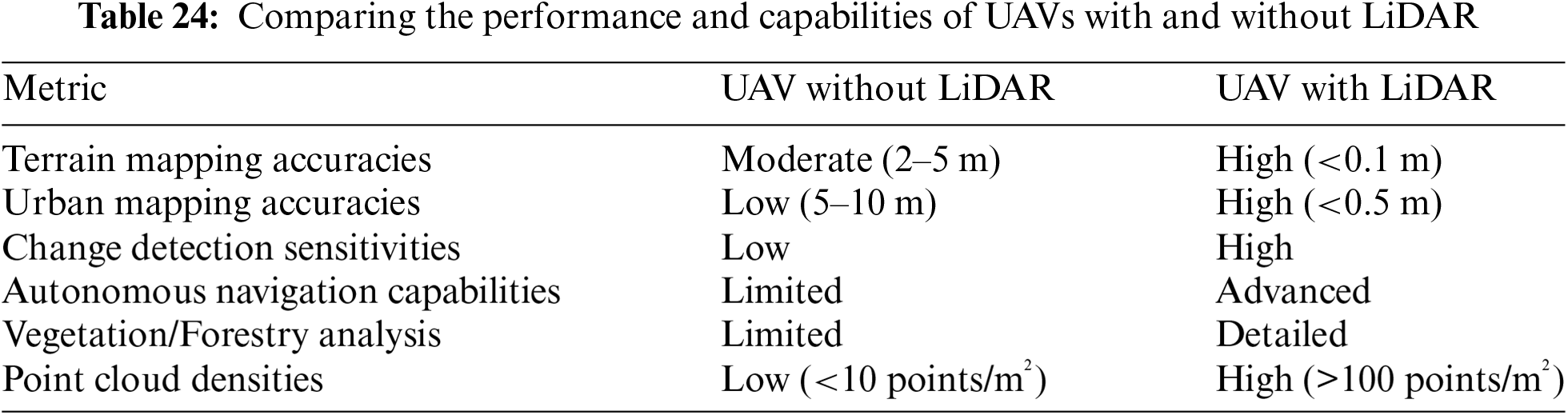
One of the most significant contributions is highly accurate terrain mapping and modeling. LiDAR-equipped UAVs can capture dense, high-resolution 3D point clouds of the terrain, creating detailed Digital Elevation Models (DEMs) and terrain maps [21,83,84]. This data is invaluable for precision agriculture applications, such as monitoring crop health and optimizing irrigation, as well as civil engineering tasks like surveying and infrastructure inspection. In forestry and natural resource management, LiDAR point clouds from UAVs provide crucial insights into biomass estimation, deforestation monitoring, and other ecological assessments. Another key contribution is the detailed mapping of urban areas and infrastructure. LiDAR point clouds from UAVs can generate highly accurate 3D models of buildings, roads, bridges, and other urban assets. This data can be leveraged for smart city planning and management, asset monitoring and maintenance, and even 3D visualization and augmented reality applications. The level of detail and accuracy far surpasses what can be achieved with traditional aerial photography or satellite imagery. The ability to detect and monitor changes over time is another important contribution of UAV-mounted LiDAR systems. By comparing 3D point clouds captured at different time intervals, operators can identify and quantify changes to the landscape, structures, or other assets. This capability is invaluable for construction progress monitoring, disaster response and damage assessment, and environmental monitoring applications, such as tracking deforestation or coastal erosion. Autonomous navigation and obstacle avoidance is another area where LiDAR point cloud data from UAVs shines.
The detailed 3D maps of the surrounding environment can be used to plan safe, collision-free flight paths and enable advanced autonomous flight capabilities [85]. This is especially crucial for operating UAVs in complex, cluttered urban or forested areas. Finally, LiDAR point clouds provide rich 3D data about vegetation structure, canopy height, and other forestry metrics, making them invaluable for applications in the agriculture and forestry sectors. UAV-based LiDAR can be used for forest inventory, biomass estimation, and monitoring of forest health and ecosystem changes over time, supporting precision forestry and precision agriculture initiatives. To illustrate the contributions of LiDAR 3D point cloud data to UAV systems, Table 24 compares the performance and capabilities of UAVs with and without LiDAR.
6.1 Future of UAV Systems in Terms of LiDAR 3D Point Cloud
One of the key trends in the future of UAV-based LiDAR systems will be the continued improvement in sensor resolution and accuracy. As LiDAR technology continues to evolve, it can be expected that UAVs will be equipped with higher-density point clouds capable of capturing even finer details of the environment. This will lead to more precise terrain mapping, infrastructure modeling, and vegetation analysis, with point cloud densities reaching far beyond the 100 points per square meter mark. The increased accuracy and resolution will unlock new possibilities in precision agriculture, urban planning, and environmental monitoring applications. Moreover, integrating LiDAR with other sensor modalities, such as high-resolution cameras and hyperspectral imagers, will enable the creation of truly multidimensional data sets. These data-rich point clouds, combined with advanced data fusion and machine learning algorithms, will provide unprecedented insights and decision-support capabilities for various stakeholders, from city planners to forest management authorities. Autonomous navigation and obstacle avoidance advancements are promising developments in the future of UAV-based LiDAR systems. As the 3D point cloud data becomes more detailed and reliable, UAVs can navigate complex environments, such as dense urban areas or heavily forested regions, with greater precision and safety. This will pave the way for more widespread deployment of UAVs in applications where human-piloted flight is challenging or impractical, such as infrastructure inspections, SAR operations, and emergency response scenarios.
Furthermore, integrating LiDAR data with real-time processing and decision-making algorithms will enable the development of truly intelligent and adaptive UAV systems. These systems will be capable of autonomously assessing the environment, detecting changes or anomalies, and responding with appropriate actions, all while maintaining optimal flight paths and mission objectives. This level of autonomy will be a game-changer in industries like precision agriculture, where UAVs can autonomously monitor crop health, identify problem areas, and trigger targeted interventions. Table 25 shows the potential future advancements in UAV-based LiDAR systems.
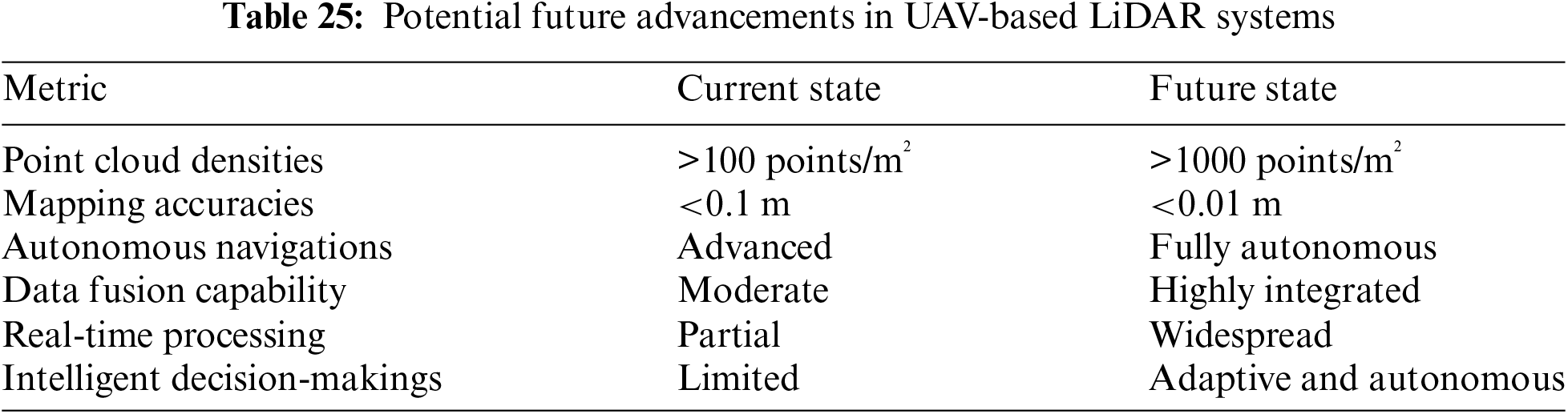
As shown in the table, the future of UAV-based LiDAR systems will be characterized by exponential improvements in sensor capabilities, data processing, and autonomous decision-making, transforming these aerial platforms into highly versatile and intelligent tools that can revolutionize various industries and applications.
Different works have been done for UAVs depending on the type of issue and challenges, such as energy, routing, QoS, security, scalability, and mobility. All these issues arise in UAV, and the majority of the authors have proposed different techniques for the improvement of this network. In UAVs, one of the key and major issues is routing, and due to the high mobility of the flying nodes, communication becomes difficult. The summary of the overall literature review is in tabular form in Table 26.
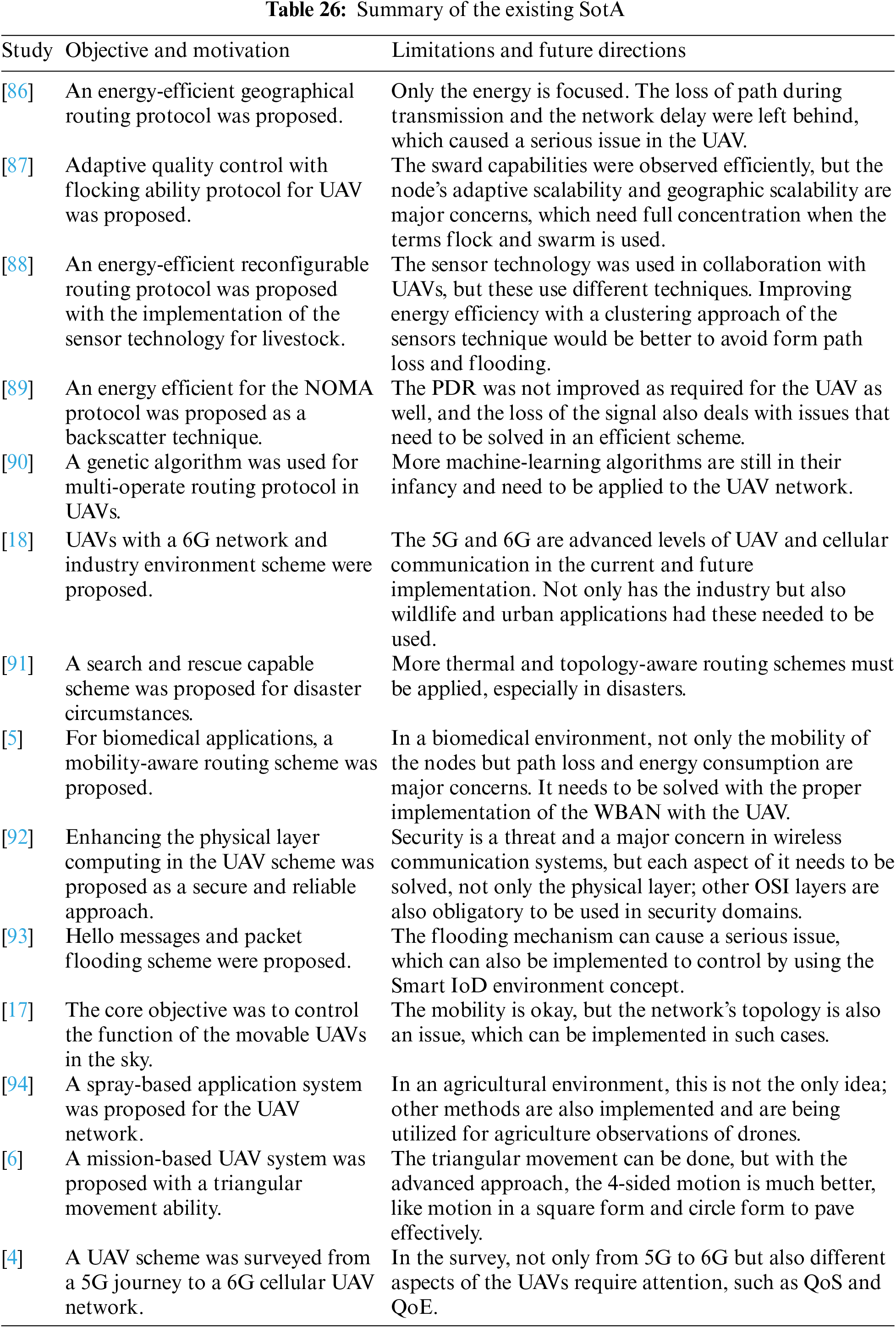
6.3 Mobility Models in UAV Systems
Mobility models play a crucial role in simulating the movement patterns and behaviors of drones and UAVs in various applications and scenarios. These models are essential for understanding and predicting how UAVs navigate, communicate, and interact within their environments. One commonly used mobility model is the Random Waypoint Model, where UAVs move randomly between predefined waypoints, simulating unpredictable movement patterns. This model is useful for studying scenarios where UAVs must cover a large area or perform tasks with varying priorities. The Gauss-Markov Model, on the other hand, introduces a correlated random walk approach, where UAV movement is influenced by its previous positions and velocities. This model reflects more realistic behaviors where UAVs exhibit some degree of inertia or persistence in their trajectories. The Manhattan Grid Model is often employed for urban environments or structured spaces, mimicking the grid-like movement patterns akin to city streets. This model benefits applications requiring precise navigation or where UAVs must adhere to specific paths and avoid obstacles.
In contrast, the Brownian Motion Model assumes UAVs move randomly with equal probability in all directions, making it suitable for scenarios where movement is truly random or influenced by environmental factors such as wind. Moreover, specialized models like Group Mobility Models simulate collective behaviors where multiple UAVs move together in formations or patterns, crucial for swarm robotics applications or coordinated surveillance missions. Each mobility model offers distinct advantages and is selected based on the specific requirements of the UAV application or simulation scenario. Understanding and selecting the appropriate mobility model is essential for accurately simulating UAV behaviors, optimizing mission planning, and developing robust control algorithms that enhance operational efficiency and mission success in diverse real-world environments. Each model offers unique characteristics for different simulation scenarios and real-world applications in drone and UAV systems, providing researchers and developers with tools to analyze and optimize UAV behavior in diverse environments and operational conditions. Table 27 shows some common mobility models used in UAV systems.
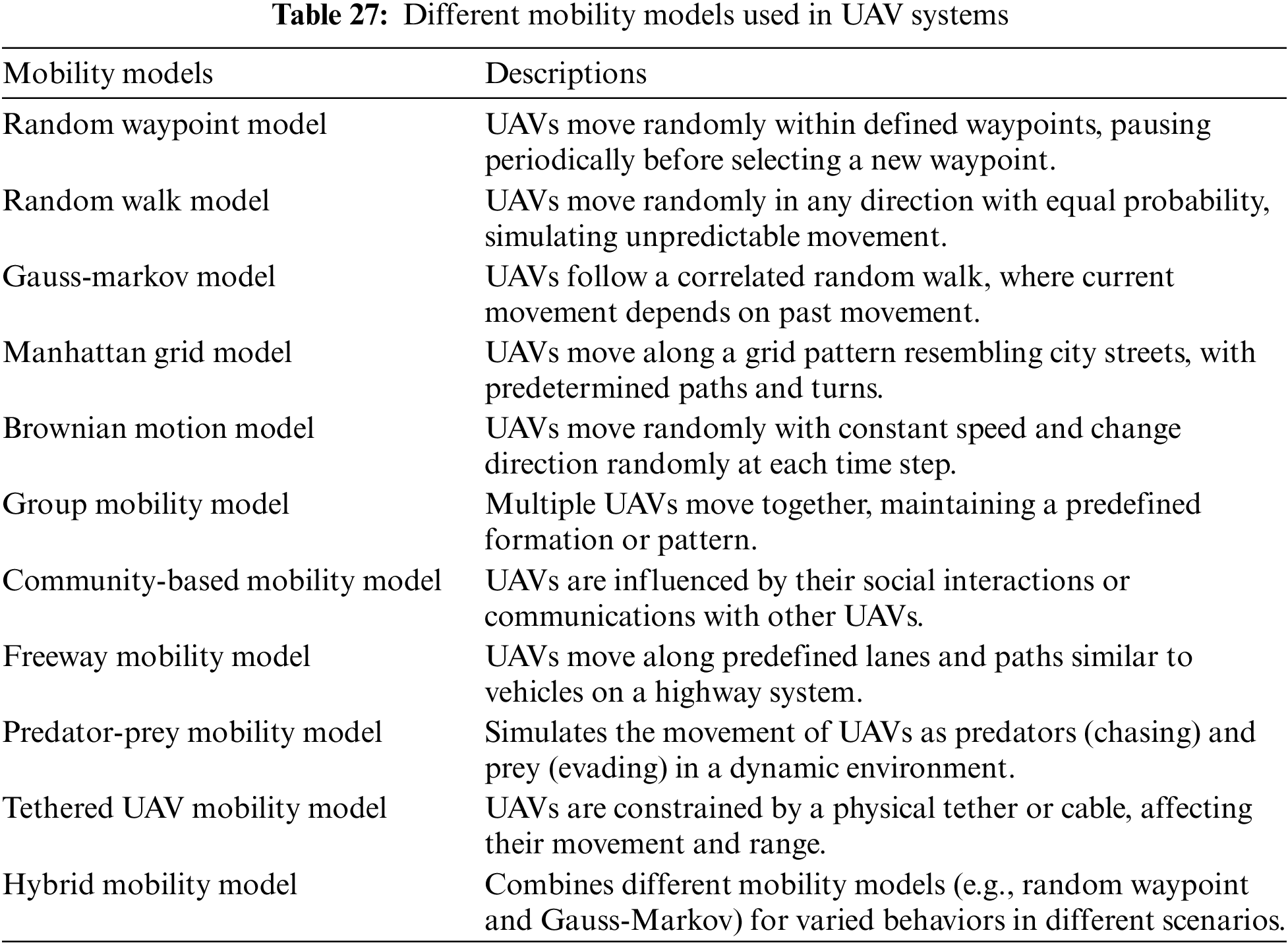
The introduction section provides a comprehensive overview of the field of UAVs or drones, including a historical perspective on their development, the diverse range of applications and use cases, and the key challenges and research areas in this domain. UAVs have become increasingly prevalent in modern society, with applications spanning aerial photography and videography, agricultural monitoring, infrastructure inspection, search and rescue operations, disaster management, military and defense, and even medical deliveries. The design considerations for UAVs involve complex factors such as airframe design, propulsion systems, payload capacity, range and endurance, control and navigation systems, and energy efficiency, as engineers and researchers must optimize these aspects to meet the specific requirements of different applications. The airframe design of a UAV plays a crucial role in determining its aerodynamic performance, stability, and maneuverability. Factors such as the choice of materials, wing configuration, and overall structural integrity must be carefully considered to ensure the UAV can withstand the stresses and environmental conditions it will encounter during flight. The propulsion system, including electric motors, internal combustion engines, or hybrid arrangements, must be selected to provide the necessary thrust and power output while balancing factors like energy efficiency, noise, and emissions. The payload capacity of a UAV is a significant design consideration, as it determines the type and amount of equipment, sensors, or cargo the vehicle can carry. The payload’s weight, size, and power requirements must be integrated into the overall design to maintain the desired flight performance and endurance. The range and endurance of a UAV are critical for its operational capabilities, and factors like the energy storage system, aerodynamic efficiency, and propulsion system design influence these parameters. Advances in battery technology, lightweight composite materials, and efficient power management systems have enabled the development of UAVs with increasingly longer flight times and operational ranges. The deployment and operation of UAV networks introduce a host of general challenges, including communication and control, coordination and collaboration between multiple UAVs, air traffic management, environmental and weather-related factors, regulatory and legal frameworks, and issues related to safety and privacy. Effective communication and control systems are essential for UAVs’ safe and efficient operation, particularly in complex environments or when multiple UAVs work together. Challenges such as signal interference, bandwidth limitations, and latency must be addressed by developing robust and reliable communication protocols.
Coordinating the actions and movements of multiple UAVs within a network is another significant challenge, as these vehicles must be able to share information, make collective decisions, and avoid collisions while working towards a common goal. Air traffic management systems, both for individual UAVs and swarms, are necessary to ensure the safe integration of UAVs into existing airspace and prevent conflicts with other aircraft. Environmental and weather-related factors, such as wind, precipitation, and temperature, can substantially impact the performance and reliability of UAV systems. Designers must develop strategies to mitigate these challenges, such as implementing advanced sensor systems, flight control algorithms, and weather-resistant components. Regulatory and legal frameworks governing the use of UAVs vary widely across different regions and jurisdictions, and compliance with these regulations is crucial for the safe and responsible deployment of these systems. Various routing protocols and algorithms have been developed for efficient data transmission, ad-hoc networking, energy-aware routing, and dynamic route optimization to address the challenges in UAV networks. These protocols consider network topology, node mobility, energy constraints, and quality of service requirements to optimize the data flow and ensure reliable communication between UAVs and ground control stations. The existing wireless communication technologies utilized in UAV systems include Wi-Fi, cellular networks, satellite communications, and dedicated UAV-specific protocols, each with advantages and limitations. Wi-Fi provides a cost-effective and readily available solution for short-range communications, while cellular networks offer broader coverage and support for longer-range operations. Satellite communications are essential for providing connectivity in remote or beyond-line-of-sight scenarios but may suffer from higher latency and bandwidth limitations. Dedicated UAV-specific protocols, such as the Unmanned Aerial Vehicle Communication System (UAVCS), have been developed to address the unique requirements of UAV networks, including seamless handovers, real-time data transmission, and tight integration with control and navigation systems. The transmission systems of UAVs face key challenges such as interference, spectrum management, bandwidth limitations, latency, security, and the impact of environmental conditions on the reliability and performance of the communication links. Interference from other wireless devices and electromagnetic interference from the UAV’s components can disrupt the communication links and impair the overall system performance. Effective spectrum management and developing advanced modulation and coding techniques are necessary to mitigate these interference challenges and ensure reliable data transmission. The integration of emerging technologies, including AI, ML, DL, and the IoT, can enhance the capabilities of UAVs, enabling autonomous decision-making, object detection and recognition, and advanced data analysis. AI-powered algorithms can be used for real-time object tracking, collision avoidance, and adaptive flight control, while ML and DL techniques can enable UAVs to learn from their experiences and adapt to changing environmental conditions. Integrating IoT sensors and connectivity can further expand the capabilities of UAV systems, allowing for seamless integration with other smart devices and the collection of a wider range of data for various applications.
6.5 In-Depth Analysis of Specific Areas in UAV Systems
The paper briefly introduces Unmanned Aerial Systems (UAS), encapsulating their historical development, diverse applications, and future potential. This overview is valuable as it lays a foundation for understanding the broad capabilities and significance of UAS in various domains, ranging from military operations to commercial and recreational uses. By tracing the evolution of UAS technology, the article highlights the technological advancements that have enabled the proliferation of drones, making them more accessible and versatile.
Specific Drone Applications: Different types of drones serve varied purposes, such as agricultural drones used for crop monitoring, spraying, and data collection; delivery drones employed by companies like Amazon and DHL for logistical operations; and surveillance drones utilized for security and monitoring. These applications present distinct challenges, including environmental factors, regulatory hurdles, and specific technological needs. Implementation of Advanced Algorithms: Advanced algorithms are essential for the functionality and efficiency of UAS, enabling tasks such as autonomous navigation, obstacle avoidance, and data processing. For example, algorithms for path planning and real-time obstacle detection are critical for safe and efficient drone operation. Optimization techniques to enhance algorithmic efficiency, reduce computational load, and improve responsiveness are crucial for practical implementation.
6.6 Technical Details and Optimization: Implementation of Technologies
• Technical Specifications
Sensors and Actuators: Sensors such as LIDAR, cameras, and ultrasonic sensors are vital for a drone’s ability to perceive its environment, while actuators like motors and servos are responsible for movement and control. For instance, LIDAR sensors are critical for creating accurate 3D maps of the environment, which are used for navigation and obstacle avoidance. Communication Protocols: Effective communication is essential for UAS operations, particularly for transmitting data between drones and ground control stations. Protocols such as MAVLink are widely used for this purpose. Understanding these protocols is crucial for developing reliable and secure communication links, especially in complex environments where signal interference and data integrity are significant concerns. Control Systems: Control algorithms, such as Proportional-Integral-Derivative (PID) controllers and state estimation techniques, are fundamental for maintaining stable flight and accurate navigation.
• Algorithmic Optimization
Optimizing the performance of algorithms used in UAS is crucial for improving flight efficiency, energy management, and real-time data processing.
Flight Path Optimization: Techniques for optimizing flight paths can significantly enhance a drone’s operational efficiency by reducing travel time, conserving battery life, and avoiding obstacles. Energy Efficiency: Improving the energy efficiency of drones is critical for extending their operational range and duration. This involves optimizing the power consumption of various components, such as the propulsion system, sensors, and communication modules. Real-time Data Processing: Efficient data processing is essential for image recognition, environmental mapping, and obstacle detection tasks. The paper may not explore techniques for optimizing these processes, such as parallel processing, hardware acceleration, and efficient data compression.
• Software Optimization
Optimizing the software used in UAS is equally important for ensuring reliable and efficient operation.
Reducing Computational Load: Techniques for reducing the computational load on the drone’s processor can improve performance and reduce power consumption. This involves optimizing the algorithms used for navigation, control, and data processing and efficiently managing the available computational resources. The paper may not provide detailed methods for achieving this, such as code optimization techniques, efficient memory management, and lightweight software frameworks. Memory Usage Optimization: Efficient memory usage is crucial for ensuring that the drone’s software can operate reliably within the constraints of the available hardware. This involves optimizing data structures, minimizing memory allocation overhead, and efficiently managing memory resources. The paper may not cover these techniques, including the specific methods used to profile and optimize memory usage in UAS software.
• Real-World Applications
Agricultural Drones: Case studies on agricultural drones could demonstrate how these systems are used for crop monitoring, spraying, and data collection. Delivery Drones: Examples of how companies like Amazon and DHL implement delivery drones could provide insights into the logistical and regulatory challenges involved—other drones such as military drones, drones in healthcare systems, and drones in disaster situations.
6.8 Perspectives for the Future
The future of UAVs is still in its infancy, which is the core of the recent and future era, especially when the UAVs fly independently, like ubiquitous computing in the sky. New deep-learning approaches have been introduced, which need proper deployment in UAVs. The passage discusses the prospects and challenges of UAVs, highlighting their nascent development and potential advancements. It emphasizes the paradigm shift towards UAVs operating independently, akin to ubiquitous computing in the sky, driven by advancements in deep learning and other technological fields. Integrating deep learning models is central to the future of UAVs, which promise to revolutionize their capabilities. These models can be tailored specifically for UAVs, leveraging novel approaches that enhance their autonomy and decision-making processes.
Moreover, there is a pressing need for advanced energy optimization algorithms and 3D-aware mobility models tailored to UAVs. These innovations are crucial for optimizing network performance and mobility efficiency, addressing challenges inherent in dynamic environments and routing complexities. Furthermore, QoS optimizations are a critical development area, particularly in adapting to UAV limitations within dynamic routing topologies. Geographic and scalability issues also demand attention, necessitating the development of distance-aware routing protocols that effectively accommodate node scalability and geographical constraints. The emergence of AI-based Internet of Aerial Vehicles (IoAV) routing algorithms represents another frontier. These algorithms are in their infancy but hold significant promise for enhancing UAV operations through intelligent routing strategies tailored to aerial environments. Improving 3D routing efficiency through dynamic and distance-based protocols is also highlighted as an area ripe for further enhancement. Looking ahead, the integration of future 5G and 6G networks is deemed essential for advancing UAV capabilities. These networks offer unparalleled coverage and bandwidth, which are critical for supporting the data-intensive operations of UAVs, particularly in remote sensing applications and artificial intelligence fields. Ensuring the efficient functionalization of drones and UAVs in these contexts remains a priority, requiring robust technological frameworks and strategic deployment strategies. In summary, the future trajectory of UAVs involves a concerted effort to integrate cutting-edge technologies such as deep learning, advanced mobility algorithms, and AI-driven routing strategies. These innovations promise to unlock new potential for UAVs across various sectors, from remote sensing to communication, paving the way for widespread adoption and integration into everyday operations.
6.9 In-Depth Analysis of Specific Drone Applications
UAVs, commonly called drones, have become indispensable across various sectors due to their flexibility, rapid deployment capabilities, and ability to operate in challenging or dangerous environments where manned systems might be impractical. UAVs are extensively used in civilian and military contexts, fulfilling various tasks, including surveillance, reconnaissance, environmental monitoring, and delivery services. The underlying communication protocols, routing algorithms, relay mechanisms, and energy management strategies significantly influence UAV systems’ efficiency and effectiveness. As these systems evolve, the demand for more sophisticated and efficient algorithms to enhance their performance grows.
Specific applications of UAVs span a broad spectrum, each requiring unique operational capabilities. In surveillance and reconnaissance, drones are pivotal in military and civilian operations, where they monitor border patrol, disaster management, and traffic control. Their ability to access and observe areas that might be unreachable or too dangerous for humans makes them ideal for these tasks. Environmental monitoring is another critical application where UAVs track and record environmental parameters, including air quality, vegetation health, and wildlife populations. UAVs’ capacity to cover large areas quickly and relay real-time data is invaluable in managing and protecting the environment. Agriculture has also benefited significantly from UAV technology, with precision agriculture utilizing drones for crop monitoring, pest detection, and the targeted application of pesticides or fertilizers. In logistics and delivery, companies such as Amazon and UPS are exploring using UAVs to rapidly and efficiently deliver goods, particularly in remote or hard-to-reach areas. Search and rescue operations leverage UAVs with advanced imaging technologies, such as thermal cameras, to locate missing persons in difficult terrains where ground teams might struggle.
Routing in UAV systems is a critical aspect that ensures efficient communication and data transmission between UAVs and ground stations or among UAVs themselves. Several advanced algorithms are employed to optimize routing. Geographic routing is one such method, where the geographic locations of UAVs guide the decision-making process for forwarding data. Algorithms like Greedy Perimeter Stateless Routing (GPSR) are commonly used in this context. Cluster-based routing groups UAVs into clusters, each with a designated leader to coordinate communication, thus reducing overhead and improving scalability. Another routing method is AODV (Ad hoc On-demand Distance Vector), a reactive routing protocol that establishes routes only when needed, which can be beneficial for conserving energy. Hierarchical routing organizes the network into layers, where higher layers manage control information, and lower layers handle data transmission, thus enhancing the efficiency and manageability of the system.
Relay mechanisms are essential in UAV communication, especially in scenarios where direct communication between the source and destination is hindered by distance or obstacles. These mechanisms rely on intermediate UAVs to forward data, ensuring it reaches its destination. Cooperative relaying is where multiple UAVs collaborate to relay data, enhancing reliability and extending the communication range. Store-carry-forward is a strategy used in delay-tolerant networks, where UAVs temporarily store data and carry it until they reach a suitable location to forward it to the destination. Multi-hop relaying involves data being passed through multiple UAVs, which is particularly useful in extensive areas where direct communication is not feasible due to the distance.
Energy efficiency is paramount in UAV systems, as these vehicles often have limited battery capacity. To address this, various strategies and algorithms focus on minimizing energy consumption. Energy-aware routing algorithms, such as the Energy-Efficient Routing Algorithm (EERA), consider the residual energy of UAVs when making routing decisions to extend the overall operational time. Duty cycling is another approach where UAVs periodically switch between active and sleep modes to conserve energy when unnecessary. Optimal path planning directs UAVs to follow paths that minimize energy consumption, taking into account factors like wind speed, altitude, and distance. Additionally, energy harvesting technologies, such as solar panels, can be integrated into UAVs to extend flight duration by harnessing ambient energy during operations.
6.10 Implementation of Advanced Algorithms
Implementing advanced algorithms in UAV systems requires careful consideration of several factors. Software and hardware integration is critical, as the algorithms need to be optimized to run on the onboard processors of UAVs, which often have limited computational power. These algorithms must also support real-time adaptation to environmental changes, such as fluctuating wind speeds or unexpected obstacles, to ensure the UAVs can adjust their operations on the fly. Simulation and testing in controlled environments, such as NS-3 or MATLAB, are essential before deploying these algorithms in real-world scenarios. This step ensures that the algorithms perform as expected under various conditions. Moreover, communication protocols like IEEE 802.11 p or LTE are crucial in implementing these algorithms, as they need to support high mobility and low latency to maintain effective communication and coordination among UAVs.
Despite significant advancements in UAV systems, several challenges persist. Scalability remains a major issue, as the complexity of maintaining efficient routing and communication increases with the number of UAVs in a network. Security is another concern, with UAV systems being vulnerable to various threats, including jamming, spoofing, and data breaches, which could compromise the mission. Energy constraints continue to pose a challenge, even with energy-efficient algorithms, as the limited battery life of UAVs restricts their operational duration, particularly for long-term missions. Looking ahead, the push towards greater autonomy in UAV systems will necessitate the development of advanced AI algorithms capable of making decisions without human intervention, further enhancing the operational capabilities of UAVs in diverse and dynamic environments. In summary, the in-depth analysis of specific drone applications and the implementation of advanced algorithms for routing, relay, and energy efficiency in UAV systems reveals a dynamic and rapidly evolving field. As UAV technology continues to integrate into various industries, developing sophisticated algorithms and energy management strategies will be crucial to overcoming existing challenges and expanding the capabilities of these systems, paving the way for future more efficient, reliable, and autonomous UAV operations.
6.11 Practical Real-World Applications
UAVs, commonly known as drones, have demonstrated remarkable versatility and effectiveness across various real-world applications. These applications span various industries and often involve complex operational environments where traditional methods might fall short. The integration of advanced algorithms for routing, relay, and energy efficiency has further enhanced the capabilities of UAV systems, making them invaluable tools in both civilian and military domains.
6.11.1 Surveillance and Reconnaissance in Military and Civilian Contexts
One of UAV systems’ most significant real-world applications is in surveillance and reconnaissance. In military operations, UAVs like the MQ-9 Reaper and the RQ-4 Global Hawk are deployed to gather intelligence, monitor enemy movements, and provide real-time data to command centers. These UAVs operate in hostile environments, often beyond the reach of traditional manned aircraft, and are equipped with high-resolution cameras, radar systems, and sensors that allow them to capture and relay critical information. Advanced routing algorithms ensure that data collected by these UAVs is transmitted efficiently, even in environments with high electronic interference or jamming attempts. In the civilian sector, UAVs are employed by law enforcement agencies for border patrol and disaster management. For example, UAVs assess damage, locate survivors, and monitor ongoing risks like floods or fires during natural disasters such as hurricanes or earthquakes. Their ability to quickly cover large areas and relay real-time information to emergency responders is crucial in minimizing response times and coordinating rescue efforts. Implementing energy-efficient algorithms and relay mechanisms ensures that UAVs can operate for extended periods, covering more ground without frequent returns for recharging.
6.11.2 Environmental Monitoring and Management
UAVs play a vital role in environmental monitoring, efficiently tracking and recording various environmental parameters over vast and often inaccessible areas. For instance, UAVs monitor air quality in urban areas by measuring pollutants and providing data to help formulate public health policies. In forestry, drones are deployed to assess the health of vegetation, detect illegal logging activities, and monitor wildlife populations. UAVs with infrared cameras and LiDAR systems can penetrate dense forest canopies, providing detailed information about forest composition and changes over time. Integrating geographic routing and energy-aware algorithms is crucial in these applications, as it ensures that UAVs can cover large areas without unnecessary energy expenditure. For instance, in wildlife conservation, UAVs track endangered species in remote locations, where they must operate autonomously for long durations. These drones can maximize their operational time by optimizing their flight paths and using energy-efficient relay mechanisms, thereby increasing the amount of data collected per mission.
In agriculture, UAVs have revolutionized farming practices through what is known as precision agriculture. Farmers use drones to monitor crop health, detect pests, and manage irrigation systems more effectively. UAVs equipped with multispectral sensors can identify stressed plants, allowing farmers to apply fertilizers or pesticides only where needed, thereby reducing costs and environmental impact. Advanced algorithms for optimal path planning and cluster-based routing enable these UAVs to efficiently cover large fields, ensuring that data is collected uniformly across the entire area. A practical example is using UAVs in vineyard management, where drones monitor grape ripening and detect areas affected by diseases like mildew. The data collected by the UAVs is analyzed in real-time, allowing for immediate interventions that can save crops and improve yields. Energy harvesting techniques, such as solar panels on UAVs, are increasingly being used in such applications, allowing drones to recharge during operations and extend their flight times.
The logistics and delivery industry is another sector where UAVs make significant inroads. Companies like Amazon and UPS have been experimenting with drone delivery systems to improve the speed and efficiency of parcel delivery, particularly in remote or congested urban areas. UAVs can bypass traffic and deliver packages directly to customers’ doorsteps, reducing delivery times and costs. The challenge in this application lies in ensuring the UAVs can navigate complex urban environments safely and efficiently, which requires advanced routing algorithms and real-time adaptation to dynamic conditions such as wind changes and obstacles. A notable case study is Amazon’s Prime Air, which aims to deliver packages within 30 min using drones. These UAVs have sophisticated navigation systems that allow them to autonomously avoid obstacles, land safely, and return to their base after delivery. Implementing hierarchical routing and duty cycling algorithms helps manage the UAVs’ energy consumption, ensuring that they can complete multiple deliveries on a single charge.
6.11.5 Search and Rescue Operations
UAVs have proven to be life-saving tools in search and rescue operations. When people are trapped in difficult-to-access areas, such as mountainous regions or collapsed buildings, drones equipped with thermal imaging cameras can quickly locate survivors. The ability of UAVs to fly at low altitudes and maneuver through tight spaces makes them ideal for these missions. The data collected by these UAVs is relayed back to rescue teams in real-time, allowing for quicker and more informed decision-making. During the 2017 hurricanes in the United States, UAVs were deployed to assess the damage and locate people stranded by floods. The drones provided aerial views of affected areas, identifying safe routes for rescue teams and delivering essential supplies to isolated communities. Cooperative relaying and multi-hop communication in these scenarios ensures that data can be transmitted over long distances, even when direct communication is impossible due to obstacles or network failures.
6.12 Challenges and Future Prospects
While the practical applications of UAV systems are vast and varied, they also come with challenges that need to be addressed for broader adoption. Scalability is a significant issue as the number of UAVs in operation increases, making it difficult to maintain efficient communication and coordination. Developing more robust and scalable routing protocols is essential to overcome this challenge. Security concerns, such as vulnerability to hacking and data breaches, must also be addressed, especially in critical applications like military surveillance or delivery of sensitive medical supplies. Moreover, the energy constraints of UAVs continue to limit their operational range and duration. Innovations in battery technology, energy harvesting, and more energy-efficient algorithms are necessary to extend the capabilities of UAV systems. The trend towards greater autonomy in UAV operations will drive the development of advanced AI algorithms capable of real-time decision-making without human intervention. This will further enhance the operational capabilities of UAVs, making them even more integral to various industries. In short, the practical applications of UAV systems in real-world scenarios demonstrate their significant potential and versatility. From military surveillance and environmental monitoring to precision agriculture, logistics, and search and rescue operations, UAVs are becoming indispensable tools across multiple sectors. As these systems continue to evolve, with advancements in routing, relay, and energy efficiency, their role in addressing complex challenges and improving operational efficiency will only grow, paving the way for more innovative and impactful uses of UAV technology.
UAVs face numerous challenges and complexities that demand robust and efficient solutions. Key areas of focus in current UAV research include routing optimization, addressing energy constraints, and enhancing QoS parameters. While existing studies have provided valuable insights into various aspects of UAV operations, there remains a need for more comprehensive approaches to tackle ongoing limitations and pave the way for advancements. Current UAV surveys cover a broad spectrum of topics, yet gaps persist in addressing critical issues such as 3D routing challenges and integrating new technologies like deep learning for UAV systems. Effective routing in three-dimensional environments is crucial for optimizing UAV flight paths and ensuring efficient data transmission and communication. Similarly, applying deep learning algorithms in UAVs has immense potential to revolutionize capabilities such as enhanced object detection through advanced camera technologies, thereby introducing novel and effective operational techniques. Moreover, while UAVs have made strides in applications like remote sensing and artificial intelligence, there remains a call for further innovation to exploit their potential fully. Integrating drones in remote sensing tasks offers significant advantages in data collection and environmental monitoring, yet innovations in this area have not fully leveraged the possibilities presented by emerging technologies. Likewise, the application of artificial intelligence in UAV systems, from autonomous decision-making to real-time analytics, represents a frontier that requires ongoing development and refinement. The list of challenges and research directions provided, such as self-driving capabilities for UAVs, wind speed estimation, QoS and QoE improvements in video streaming, and addressing dimensional vision problems, underscores the multifaceted nature of UAV development. Each area presents unique technical and operational challenges requiring interdisciplinary collaboration and innovative solutions. In conclusion, while significant strides have been made in understanding and advancing UAV technology, the field remains dynamic and evolving. Addressing current limitations and exploring new avenues for innovation is essential to unlock the full potential of UAVs across diverse applications. By prioritizing research and development efforts in critical areas such as 3D routing, deep learning integration, and advanced applications like remote sensing and AI, the UAV industry can continue to grow and contribute meaningfully to various sectors, including agriculture, infrastructure monitoring, and disaster response.
Wide-ranging and thorough surveys of UAVs have been conducted for this paper. The main problems, difficulties, and other noteworthy aspects have been discussed. Future evaluations of UAV networks could consider various mobility models and evaluation criteria. Additional performance evaluation parameters can produce the best and alternative results compared to the current state-of-the-art solutions tools, such as jitter, path loss, network stability period, total energy consumption, security, and privacy issues. UAV system research is still in its infancy, presenting various problems and difficulties that call for efficient solutions. New UAV software, hardware, and routing technologies are constantly emerging, some of which may be easily adaptable to UAVs. The main research challenge is integrating these new technologies with existing ones. Any new technology must be able to fit into UAV’s open architecture. Safeguarding the UAV from attackers still requires dependable routing algorithms that address the vulnerability issue.
Acknowledgement: This work was supported by the Researchers Supporting Project number (RSP2024R395), King Saud University, Riyadh, Saudi Arabia.
Funding Statement: This work was supported by the Researchers Supporting Project number (RSP2024R395), King Saud University, Riyadh, Saudi Arabia.
Author Contributions: The authors confirm their contribution to the paper as follows: study conception and design: Altaf Hussain, Shuaiyong Li; data collection: Tariq Hussain; analysis and interpretation of results: Altaf Hussain, Tariq Hussain, Shuaiyong Li; draft manuscript preparation: Altaf Hussain, Tariq Hussain, Shuaiyong Li, Xianxuan Lin, Farman Ali, Ahmad Ali AlZubi. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: We confirm that relevant guidelines and regulations are carried out in all methods.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. M. Quach, J. Pang, D. Tian, G. Valenzise, and F. Dufaux, “Survey on deep learning-based point cloud compression,” Front. Signal Process., vol. 2, 2022, Art. no. 846972. doi: 10.3389/frsip.2022.846972. [Google Scholar] [CrossRef]
2. M. Mozaffari, W. Saad, M. Bennis, Y.-H. Nam, and M. Debbah, “A tutorial on UAVs for wireless networks: Applications, challenges, and open problems,” IEEE Commun. Surveys Tutor., vol. 21, pp. 2334–2360, 2018. doi: 10.1109/COMST.2019.2902862. [Google Scholar] [CrossRef]
3. H. Ishimaru, Y. Nakamura, M. Fujimoto, H. Suwa, and K. Yasumoto, “A QoS-Aware 3D point cloud streaming from real space for interaction in metaverse,” in 2023 IEEE Int. Conf. Pervasive Comput. Commun. Workshops Other Affiliated Events (PerCom Workshops), Atlanta, GA, USA, 2023, pp. 68–73. [Google Scholar]
4. G. Geraci et al., “What will the future of UAV cellular communications be? A flight from 5G to 6G,” IEEE Commun. Surveys Tutor., vol. 24, pp. 1304–1335, 2022. doi: 10.1109/COMST.2022.3171135. [Google Scholar] [CrossRef]
5. J. V. Ananthi and P. S. H. Jose, “Mobility management UAV-based grouping routing protocol in flying ad hoc networks for biomedical applications,” Int. J. Commun. Syst., vol. 36, 2023, Art. no. 5362. doi: 10.1002/dac.5362. [Google Scholar] [CrossRef]
6. B. M. M. El-Basioni and S. M. Abd El-Kader, “Mission-based PTR triangle for multi-UAV systems flight planning,” Ad Hoc Netw., vol. 142, 2023, Art. no. 103115. doi: 10.1016/j.adhoc.2023.103115. [Google Scholar] [CrossRef]
7. P. Vincent and I. Rubin, “A framework and analysis for cooperative search using UAV swarms,” in Proc. 2004 ACM Symp. Appl. Comput., Nicosia, Cyprus, 2004, vol. 4, pp. 79–86. [Google Scholar]
8. M. M. Azari, G. Geraci, A. Garcia-Rodriguez, and S. Pollin, “Cellular UAV-to-UAV communications,” in 2019 IEEE 30th Annu. Int. Symp. Personal Indoor Mobile Radio Commun. (PIMRC), Istanbul, Turkey, 2019, pp. 1–7. [Google Scholar]
9. H. Wang, D. Huo, and B. Alidaee, “Position unmanned aerial vehicles in the mobile ad hoc network,” J. Intell. Robot. Syst., vol. 74, pp. 455–464, 2014. doi: 10.1007/s10846-013-9939-y. [Google Scholar] [CrossRef]
10. I. Bekmezci, O. K. Sahingoz, and Ş. Temel, “Flying ad-hoc networks (FANETsA survey,” Ad Hoc Netw., vol. 11, pp. 1254–1270, 2013. doi: 10.1016/j.adhoc.2012.12.004. [Google Scholar] [CrossRef]
11. R. A. Nazib and S. Moh, “Routing protocols for unmanned aerial vehicle-aided vehicular ad hoc networks: A survey,” IEEE Access, vol. 8, pp. 77535–77560, 2020. doi: 10.1109/ACCESS.2020.2989790. [Google Scholar] [CrossRef]
12. H. Ibn-Khedher, M. Laroui, M. Alfaqawi, A. Magnouche, H. Moungla and H. Afifi, “6G-edge support of Internet of Autonomous Vehicles: A survey,” Trans. Emerg. Telecomm. Technol., vol. 35, 2024, Art. no. 4918. doi: 10.1002/ett.4918. [Google Scholar] [CrossRef]
13. M. H. Alhabib and Q. I. Ali, “Internet of autonomous vehicles communication infrastructure: A short review,” Diagnostyka, vol. 24, 2023. doi: 10.29354/diag/168310. [Google Scholar] [CrossRef]
14. V. Veerasamy and R. Natarajan, “Review on recent applications of internet of flying things,” in Modelling and Simulation of Fast-Moving Ad-Hoc Networks (FANETs and VANETs), T. Pradeep Kumar and M. Alamelu, Eds., IGI Global, 2023, pp. 124–139. doi: 10.4018/978-1-6684-3610-3.ch007. [Google Scholar] [CrossRef]
15. E. Pastor, J. Lopez, and P. Royo, “A hardware/software architecture for uav payload and mission control,” in 2006 IEEE/AIAA 25TH Digit. Avion. Syst. Conf., Portland, OR, USA, 2006, pp. 1–8. [Google Scholar]
16. S. R. Perumal, V. Muthumanikandan, and J. Sushmitha, “Flying ad hoc networks routing constraints and challenge perspectives,” in Modelling and Simulation of Fast-Moving Ad-Hoc Networks (FANETs and VANETs), T. Pradeep Kumar and M. Alamelu, Eds., IGI Global, 2023, pp. 13–42. doi: 10.4018/978-1-6684-3610-3.ch002. [Google Scholar] [CrossRef]
17. R. Bieliakov and V. Romanyuk, “Classification of objective control functions of fanet communication nodes,” in Proc. 2nd Int. Sci. Practi. Conf., vol. 140, pp. 644–647, 2023. Warsaw, Poland. [Google Scholar]
18. S. H. Alsamhi et al., “Computing in the sky: A survey on intelligent ubiquitous computing for UAV-assisted 6G networks and Industry 4.0/5,” Drones, vol. 6, 2022, Art. no. 177. [Google Scholar]
19. X. Jiang, M. Sheng, N. Zhao, C. W. Xing, W. D. Lu and X. B. Wang, “Green UAV communications for 6G: A survey,” Chin. J. Aeronaut., vol. 35, pp. 19–34, 2022. doi: 10.1016/j.cja.2021.04.025. [Google Scholar] [CrossRef]
20. D. M. Atwater, “The commercial global drone market,” Graziadio Business Review, vol. 18, no. 2, 2015. [Google Scholar]
21. A. Li, M. Hansen, and B. Zou, “Traffic management and resource allocation for UAV-based parcel delivery in low-altitude urban space,” Transp. Res. Part C: Emerg. Technol., vol. 143, 2022, Art. no. 103808. doi: 10.1016/j.trc.2022.103808. [Google Scholar] [CrossRef]
22. M. Gayathri, M. Meghana, M. Trivedh, and D. Manju, “Suspicious activity detection and tracking through unmanned aerial vehicle using deep learning techniques,” Int. J. Adv. Trends Comput. Sci. Eng., vol. 9, no. 3, pp. 2812–2816, 2020. doi: 10.30534/ijatcse/2020/51932020. [Google Scholar] [CrossRef]
23. M. D’Aloia, M. Rizzi, R. Russo, M. Notarnicola, and L. Pellicani, “A marker-based image processing method for detecting available parking slots from UAVs,” in New Trends in Image Analysis and Processing, Genoa, Italy, 2015, pp. 275–281. [Google Scholar]
24. M. Hossain, M. A. Hossain, and F. A. Sunny, “A UAV-based traffic monitoring system for smart cities,” in 2019 Int. Conf. Sustain. Technol. Ind. 4.0 (STI), Dhaka, Bangladesh, 2019, pp. 1–6. [Google Scholar]
25. J. Cuaran and J. Leon, “Crop monitoring using unmanned aerial vehicles: A review,” Agric. Rev., vol. 42, pp. 121–132, 2021. doi: 10.18805/ag.R-180. [Google Scholar] [CrossRef]
26. S. Guo et al., “Seeking in ride-on-demand service: A reinforcement learning model with dynamic price prediction,” IEEE Internet Things J., vol. 11, no. 18, pp. 29890–29910, Sep. 15, 2024. doi: 10.1109/JIOT.2024.3407119. [Google Scholar] [CrossRef]
27. J. Wang, J. Ji, Z. Jiang, and L. Sun, “Traffic flow prediction based on spatiotemporal potential energy fields,” IEEE Trans. Knowl. Data Eng., vol. 35, no. 9, pp. 9073–9087, Sep. 1, 2023. doi: 10.1109/TKDE.2022.3221183. [Google Scholar] [CrossRef]
28. Z. Sun, P. Wang, M. C. Vuran, M. A. Al-Rodhaan, A. M. Al-Dhelaan and I. F. Akyildiz, “BorderSense: Border patrol through advanced wireless sensor networks,” Ad Hoc Netw., vol. 9, pp. 468–477, 2011. doi: 10.1016/j.adhoc.2010.09.008. [Google Scholar] [CrossRef]
29. O. M. Bushnaq, D. Mishra, E. Natalizio, and I. F. Akyildiz, “Unmanned aerial vehicles (UAVs) for disaster management,” in Micro and Nano Technologies, Nanotechnology-Based Smart Remote Sensing Networks for Disaster Prevention. Elsevier, 2022, pp. 159–188. [Google Scholar]
30. E. De Beni, M. Cantarero, and A. Messina, “UAVs for volcano monitoring: A new approach applied on an active lava flow on Mt. Etna (Italyduring the 27 February–02 March 2017 eruption,” J. Volcanol. Geothermal Res., vol. 369, pp. 250–262, 2019. doi: 10.1016/j.jvolgeores.2018.12.001. [Google Scholar] [CrossRef]
31. E. Karamuz, R. J. Romanowicz, and J. Doroszkiewicz, “The use of unmanned aerial vehicles in flood hazard assessment,” J. Flood Risk Manag., vol. 13, 2020, Art. no. 12622. doi: 10.1111/jfr3.12622. [Google Scholar] [CrossRef]
32. F. Yamazaki, T. Matsuda, S. Denda, and W. Liu, “Construction of 3D models of buildings damaged by earthquakes using UAV aerial images,” in Proc. Tenth Pacific Conf. Earthquake Eng. Build. Earthq.-Resilient Pacific, Sydney, Australia, 2015, vol. 204, pp. 1–8. [Google Scholar]
33. X. Li and A. V. Savkin, “Networked unmanned aerial vehicles for surveillance and monitoring: A survey,” Future Internet, vol. 13, 2021, Art. no. 174. doi: 10.3390/fi13070174. [Google Scholar] [CrossRef]
34. E. P. De Freitas et al., “UAV relay network to support WSN connectivity,” in Int. Congr. Ultra Mod. Telecommun. Control Syst., Moscow, Russia, 2010, pp. 309–314. [Google Scholar]
35. G. Pajares, “Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs),” Photogramm. Eng. Remote Sen., vol. 81, pp. 281–330, 2015. doi: 10.14358/PERS.81.4.281. [Google Scholar] [CrossRef]
36. G. Zheng and L. Yuan, “A review of QoE research progress in metaverse,” Displays, vol. 77, no, 2023, Art. no. 102389. doi: 10.1016/j.displa.2023.102389. [Google Scholar] [CrossRef]
37. I. U. Khan, I. M. Qureshi, M. A. Aziz, T. A. Cheema, and S. B. H. Shah, “Smart IoT control-based nature inspired energy efficient routing protocol for flying ad hoc network (FANET),” IEEE Access, vol. 8, pp. 56371–56378, 2020. doi: 10.1109/ACCESS.2020.2981531. [Google Scholar] [CrossRef]
38. J. Xin, W. Xu, B. Cao, T. Wang, and S. Zhang, “A deep-learning-based MAC for integrating channel access, rate adaptation and channel switch,” 2024, arXiv:2406.02291. [Google Scholar]
39. R. Abdallah, J. Gaber, R. Kouta, C. Sarraf, and M. Wack, “Reliability of data transmission of UAVs,” SSRN Electron. J., vol. 10, 2018, Art. no. 4. [Google Scholar]
40. A. Vashisth and R. S. Batth, “An overview, survey, and challenges in UAVs communication network,” in 2020 Int. Conf. Intell. Eng. Manag. (ICIEM), London, UK, 2020, pp. 342–347. [Google Scholar]
41. H. Nawaz, H. M. Ali, and A. A. Laghari, “UAV communication networks issues: A review,” Arch. Comput. Methods Eng., vol. 28, pp. 1349–1369, 2021. [Google Scholar]
42. N. A. Khan, N. Jhanjhi, S. N. Brohi, A. A. Almazroi, and A. A. Almazroi, “A secure communication protocol for unmanned aerial vehicles,” Comput. Mater. Contin., vol. 70, pp. 601–618, 2022. doi: 10.32604/cmc.2022.019419. [Google Scholar] [CrossRef]
43. P. G. Fahlstrom, T. J. Gleason, and M. H. Sadraey, Introduction to UAV Systems. The Atrium, Southern Gate, Chichester, West Sussex, UK: John Wiley & Sons, 2022. [Google Scholar]
44. P. McEnroe, S. Wang, and M. Liyanage, “A survey on the convergence of edge computing and AI for UAVs: Opportunities and challenges,” IEEE Internet Things J., vol. 9, pp. 15435–15459, 2022. doi: 10.1109/JIOT.2022.3176400. [Google Scholar] [CrossRef]
45. T. Li et al., “Energy-efficient and secure communication toward UAV networks,” IEEE Internet Things J., vol. 9, pp. 10061–10076, 2021. doi: 10.1109/JIOT.2021.3118079. [Google Scholar] [CrossRef]
46. H. Kurunathan, H. Huang, K. Li, W. Ni, and E. Hossain, “Machine learning-aided operations and communications of unmanned aerial vehicles: A contemporary survey,” IEEE Commun. Surveys Tutor., vol. 26, no. 1, pp. 496–533, 2023. doi: 10.1109/COMST.2023.3312221. [Google Scholar] [CrossRef]
47. R. Hamatapa and C. Vongchumyen, “Image processing for drones detection,” in 2019 5th Int. Conf. Eng., Appl. Sci. Technol. (ICEAST), Luang Prabang, Laos, 2019, pp. 1–4. [Google Scholar]
48. P. Mittal, R. Singh, and A. Sharma, “Deep learning-based object detection in low-altitude UAV datasets: A survey,” Image Vis. Comput., vol. 104, 2020, Art. no. 104046. doi: 10.1016/j.imavis.2020.104046. [Google Scholar] [CrossRef]
49. J. Pei, H. Chen, and L. Shu, “UAV-assisted connectivity enhancement algorithms for multiple isolated sensor networks in agricultural Internet of Things,” Comput. Netw., vol. 207, 2022, Art. no. 108854. doi: 10.1016/j.comnet.2022.108854. [Google Scholar] [CrossRef]
50. S. A. Al-Ahmed, T. Ahmed, Y. Zhu, O. O. Malaolu, and M. Z. Shakir, “UAV-Enabled IoT Networks: Architecture, opportunities, and challenges,” in Wireless Networks and Industrial IoT, N. H. Mahmood, N. Marchenko, M. Gidlund, and P. Popovski, Eds., Cham: Springer, 2021, pp. 263–288. doi: 10.1007/978-3-030-51473-0_14. [Google Scholar] [CrossRef]
51. D. Mishra, A. M. Vegni, V. Loscrí, and E. Natalizio, “Drone networking in the 6G era: A technology overview,” IEEE Commun. Stand. Mag., vol. 5, no. 4, pp. 88–95, 2021. doi: 10.1109/MCOMSTD.0001.2100016. [Google Scholar] [CrossRef]
52. R. Majeed, N. A. Abdullah, M. F. Mushtaq, and R. Kazmi, “Drone security: Issues and challenges,” Parameters, vol. 2, 2021, Art. no. 5. doi: 10.14569/issn.2156-5570. [Google Scholar] [CrossRef]
53. F. Tlili, S. Ayed, and L. C. Fourati, “Advancing UAV security with artificial intelligence: A comprehensive survey of techniques and future directions,” Internet of Things, vol. 27, 2024, Art. no. 101281. doi: 10.1016/j.iot.2024.101281. [Google Scholar] [CrossRef]
54. C. Torens, F. Nikodem, J. C. Dauer, S. Schirmer, and J. S. Dittrich, “Geofencing requirements for onboard safe operation monitoring,” CEAS Aeronaut. J., vol. 11, pp. 767–779, 2020. doi: 10.1007/s13272-020-00451-0. [Google Scholar] [CrossRef]
55. A. Shafique, A. Mehmood, and M. Elhadef, “Survey of security protocols and vulnerabilities in unmanned aerial vehicles,” IEEE Access, vol. 9, pp. 46927–46948, 2021. doi: 10.1109/ACCESS.2021.3066778. [Google Scholar] [CrossRef]
56. J. Peng, Z. Zhang, Q. Wu, and B. Zhang, “Anti-jamming communications in UAV swarms: A reinforcement learning approach,” IEEE Access, vol. 7, pp. 180532–180543, 2019. doi: 10.1109/ACCESS.2019.2958328. [Google Scholar] [CrossRef]
57. P. M. Laso, D. Brosset, and M.-A. Giraud, “Defining role-based access control for a secure platform of unmanned surface vehicle fleets,” in OCEANS 2019-Marseille, Marseille, France, 2019, pp. 1–4. [Google Scholar]
58. M. J. Iqbal, M. M. Iqbal, I. Ahmad, M. O. Alassafi, A. S. Alfakeeh and A. Alhomoud, “Real-time surveillance using deep learning,” Secur. Commun. Netw., vol. 2021, 2021, Art. no. 6184756. doi: 10.1155/2021/6184756. [Google Scholar] [CrossRef]
59. A. Altaweel, H. Mukkath, and I. Kamel, “GPS Spoofing attacks in FANETs: A systematic literature review,” IEEE Access, vol. 11, pp. 55233–55280, 2023. doi: 10.1109/ACCESS.2023.3281731. [Google Scholar] [CrossRef]
60. A. P. Cracknell, “UAVs: Regulations and law enforcement,” Int. J. Remote Sens., vol. 38, pp. 3054–3067, 2017. doi: 10.1080/01431161.2017.1302115. [Google Scholar] [CrossRef]
61. T. Alladi, V. Chamola, and N. Kumar, “PARTH: A two-stage lightweight mutual authentication protocol for UAV surveillance networks,” Comput. Commun., vol. 160, pp. 81–90, 2020. doi: 10.1016/j.comcom.2020.05.025. [Google Scholar] [CrossRef]
62. T. T. Khoei, E. Ghribi, P. Ranganathan, and N. Kaabouch, “A performance comparison of encryption/decryption algorithms for UAV swarm communications,” 2021. doi: 10.13140/RG.2.2.17379.48160. [Google Scholar] [CrossRef]
63. K. Messaoudi, O. S. Oubbati, A. Rachedi, A. Lakas, T. Bendouma and N. Chaib, “A survey of UAV-based data collection: Challenges, solutions and future perspectives,” J. Netw. Comput. Appl., vol. 216, 2023, Art. no. 103670. doi: 10.1016/j.jnca.2023.103670. [Google Scholar] [CrossRef]
64. T. Tanzi, L. Apvrille, J.-L. Dugelay, and Y. Roudier, “UAVs for humanitarian missions: Autonomy and reliability,” in IEEE Global Humanit. Technol. Conf. (GHTC 2014), San Jose, CA, USA, 2014, pp. 271–278. doi: 10.1109/GHTC.2014.6970292. [Google Scholar] [CrossRef]
65. K. Kim and Y. Kang, “Drone security module for UAV data encryption,” in 2020 Int. Conf. Inf. Commun. Technol. Converg. (ICTC), Jeju, Republic of Korea, 2020, pp. 1672–1674. [Google Scholar]
66. X. Xia, N. P. Bhatt, A. Khajepour, and E. Hashemi, “Integrated inertial-LiDAR-based map matching localization for varying environments,” IEEE Trans. Intell. Veh., vol. 8, no. 10, pp. 4307– 4318, 2023. doi: 10.1109/TIV.2023.3298892. [Google Scholar] [CrossRef]
67. J. Agrawal and M. Kapoor, “ARMS-EGR—Adaptive ranking and mobile sink-enabled energy-efficient geographic routing protocol in flying ad hoc networks,” Int. J. Commun. Syst., vol. 36, 2023, Art. no. 5405. doi: 10.1002/dac.5405. [Google Scholar] [CrossRef]
68. M. M. Alam and S. Moh, “Q-learning-based routing inspired by adaptive flocking control for collaborative unmanned aerial vehicle swarms,” Veh. Commun., vol. 40, 2023, Art. no. 100572. doi: 10.1016/j.vehcom.2023.100572. [Google Scholar] [CrossRef]
69. M. A. Alanezi et al., “UBER: UAV-based energy-efficient reconfigurable routing scheme for smart wireless livestock sensor network,” Sensors, vol. 22, 2022, Art. no. 6158. doi: 10.3390/s22166158. [Google Scholar] [PubMed] [CrossRef]
70. S. AlJubayrin et al., “Energy efficient transmission design for noma backscatter-aided uav networks with imperfect cSI,” Drones, vol. 6, 2022, Art. no. 190. doi: 10.3390/drones6080190. [Google Scholar] [CrossRef]
71. M. Alolaiwy and M. Zohdy, “Multi-objective message routing in electric and flying vehicles using a genetics algorithm,” Sensors, vol. 23, 2023, Art. no. 1100. doi: 10.3390/s23031100. [Google Scholar] [PubMed] [CrossRef]
72. S. H. Alsamhi et al., “UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation,” Drones, vol. 6, 2022, Art. no. 154. doi: 10.3390/drones6070154. [Google Scholar] [CrossRef]
73. A. Asim and M. Cada, “Enhancement of physical layer security in flying ad-hoc networks by intelligent reflecting metasurfaces,” Int. J. Intell. Syst. Appl. Eng., vol. 11, pp. 46–50, 2023. [Google Scholar]
74. M. S. Ayub, P. Adasme, D. C. Melgarejo, R. L. Rosa, and D. Z. Rodríguez, “Intelligent hello dissemination model for FANET routing protocols,” IEEE Access, vol. 10, pp. 46513–46525, 2022. doi: 10.1109/ACCESS.2022.3170066. [Google Scholar] [CrossRef]
75. A. Biglia et al., “UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses,” Sci. Total Environ., vol. 845, 2022, Art. no. 157292. doi: 10.1016/j.scitotenv.2022.157292. [Google Scholar] [PubMed] [CrossRef]
76. J.-D. M. M. Biomo, T. Kunz, and M. St-Hilaire, “A novel routing protocol for reducing packet delay with multi-beam antennas,” Comput. Netw., vol. 220, 2023, Art. no. 109479. doi: 10.1016/j.comnet.2022.109479. [Google Scholar] [CrossRef]
77. Y. Cai, Z. Wei, S. Hu, C. Liu, D. W. K. Ng and J. Yuan, “Resource allocation and 3D trajectory design for power-efficient IRS-assisted UAV-NOMA communications,” IEEE Trans. Wirel. Commun., vol. 21, pp. 10315–10334, 2022. doi: 10.1109/TWC.2022.3183300. [Google Scholar] [CrossRef]
78. G. M. Cappello et al., “A multi-UAVs’ provider model for the provision of 5g service chains: A game theoretic approach,” in Learn. Intell. Optim.: 16th Int. Conf., LION 16, Milos Island, Greece, 2023, vol. 13621, pp. 445–459. [Google Scholar]
79. T. Deng et al., “Comparison of multi-class and fusion of multiple single-class SegNet model for mapping karst wetland vegetation using UAV images,” Sci. Rep., vol. 12, 2022, Art. no. 13270. doi: 10.1038/s41598-022-17620-2. [Google Scholar] [PubMed] [CrossRef]
80. M. K. Diaa, I. S. Mohamed, and M. A. Hassan, “OPBRP-obstacle prediction based routing protocol in VANETs,” Ain Shams Eng. J., vol. 14, 2023, Art. no. 101989. doi: 10.1016/j.asej.2022.101989. [Google Scholar] [CrossRef]
81. Q. Guo et al., “Urban tree classification based on object-oriented approach and random forest algorithm using unmanned aerial vehicle (UAV) multispectral imagery,” Remote Sens., vol. 14, 2022, Art. no. 3885. doi: 10.3390/rs14163885. [Google Scholar] [CrossRef]
82. A. Hussain, B. Shah, T. Hussain, F. Ali, and D. Kwak, “Co-DLSA: Cooperative delay and link stability aware with relay strategy routing protocol for flying ad-hoc network,” Hum. Centric Comput. Inf. Sci., vol. 12, no. 34, pp. 428–447, 2022. [Google Scholar]
83. A. Hussain et al., “DLSA: Delay and link stability aware routing protocol for flying ad-hoc networks (FANETs),” Wirel. Pers. Commun., vol. 121, pp. 2609–2634, 2021. doi: 10.1007/s11277-021-08839-9. [Google Scholar] [CrossRef]
84. C. Jiang et al., “Object detection from UAV thermal infrared images and videos using YOLO models,” Int. J. Appl. Earth Obs. Geoinf., vol. 112, 2022, Art. no. 102912. doi: 10.1016/j.jag.2022.102912. [Google Scholar] [CrossRef]
85. M. F. Khan, K.-L. A. Yau, M. H. Ling, M. A. Imran, and Y.-W. Chong, “An intelligent cluster-based routing scheme in 5G flying ad hoc networks,” Appl. Sci., vol. 12, 2022, Art. no. 3665. doi: 10.3390/app12073665. [Google Scholar] [CrossRef]
86. N. Krishnan, M. S. Yoosuf, and K. Murugan, “Establishment of fanets using IoT-based uav and its issues related to mobility and authentication,” in Modelling and Simulation of Fast-Moving Ad-Hoc Networks (FANETs and VANETs), T. Pradeep Kumar and M. Alamelu, Eds., IGI Global, 2023, pp. 74–93. doi: 10.4018/978-1-6684-3610-3.ch004. [Google Scholar] [CrossRef]
87. S. Kumar, R. S. Raw, and A. Bansal, “LoCaL: Link-optimized cone-assisted location routing in flying ad hoc networks,” Int. J. Commun. Syst., vol. 36, 2023, Art. no. 5375. doi: 10.1002/dac.5375. [Google Scholar] [CrossRef]
88. J. Lansky et al., “An energy-aware routing method using firefly algorithm for flying ad hoc networks,” Sci. Rep., vol. 13, 2023, Art. no. 1323. doi: 10.1038/s41598-023-27567-7. [Google Scholar] [PubMed] [CrossRef]
89. X. Tong, X. Li, F. Ding, and Y. Liu, “Network consensus analysis and optimization of distributed fanets based on multi-agent consensus theory,” EURASIP Journal on Wireless Communications and Networking, vol. 2023, no. 1, 2023, Art. no. 43. [Google Scholar]
90. W. Liu, K. Quijano, and M. M. Crawford, “YOLOv5-Tassel: Detecting tassels in RGB UAV imagery with improved YOLOv5 based on transfer learning,” IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., vol. 15, pp. 8085–8094, 2022. doi: 10.1109/JSTARS.2022.3206399. [Google Scholar] [CrossRef]
91. W. Lu et al., “Secure transmission for multi-UAV-assisted mobile edge computing based on reinforcement learning,” IEEE Trans. Netw. Sci. Eng., vol. 10, no. 3, pp. 1270–1282, 2022. doi: 10.1109/TNSE.2022.3185130. [Google Scholar] [CrossRef]
92. S. A. H. Mohsan, M. A. Khan, M. H. Alsharif, P. Uthansakul, and A. A. Solyman, “Intelligent reflecting surfaces assisted UAV communications for massive networks: Current trends, challenges, and research directions,” Sensors, vol. 22, 2022, Art. no. 5278. doi: 10.3390/s22145278. [Google Scholar] [PubMed] [CrossRef]
93. S. A. H. Mohsan, N. Q. H. Othman, M. A. Khan, H. Amjad, and J. Żywiołek, “A comprehensive review of micro UAV charging techniques,” Micromachines, vol. 13, 2022, Art. no. 977. doi: 10.3390/mi13060977. [Google Scholar] [PubMed] [CrossRef]
94. H. Qin, W. Zhou, Y. Yao, and W. Wang, “Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data,” Remote Sens. Environ., vol. 280, 2022, Art. no. 113143. doi: 10.1016/j.rse.2022.113143. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools