
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Improving Generalization for Hyperspectral Image Classification: The Impact of Disjoint Sampling on Deep Models
1 Department of Computer Science, National University of Computer and Emerging Sciences, Chiniot, 35400, Pakistan
2 Institute of Software Development and Engineering, Innopolis University, Innopolis, 420500, Russia
3 Dipartimento di Matematica e Informatica—MIFT, University of Messina, Messina, 98121, Italy
4 School of Computer Science, University of Hull, Hull, HU6 7RX, UK
5 Department of Geography, College of Humanities and Social Sciences, King Saud University, Riyadh, 11451, Saudi Arabia
* Corresponding Author: Muhammad Ahmad. Email:
Computers, Materials & Continua 2024, 81(1), 503-532. https://doi.org/10.32604/cmc.2024.056318
Received 11 July 2024; Accepted 11 August 2024; Issue published 15 October 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Disjoint sampling is critical for rigorous and unbiased evaluation of state-of-the-art (SOTA) models e.g., Attention Graph and Vision Transformer. When training, validation, and test sets overlap or share data, it introduces a bias that inflates performance metrics and prevents accurate assessment of a model’s true ability to generalize to new examples. This paper presents an innovative disjoint sampling approach for training SOTA models for the Hyperspectral Image Classification (HSIC). By separating training, validation, and test data without overlap, the proposed method facilitates a fairer evaluation of how well a model can classify pixels it was not exposed to during training or validation. Experiments demonstrate the approach significantly improves a model’s generalization compared to alternatives that include training and validation data in test data (A trivial approach involves testing the model on the entire Hyperspectral dataset to generate the ground truth maps. This approach produces higher accuracy but ultimately results in low generalization performance). Disjoint sampling eliminates data leakage between sets and provides reliable metrics for benchmarking progress in HSIC. Disjoint sampling is critical for advancing SOTA models and their real-world application to large-scale land mapping with Hyperspectral sensors. Overall, with the disjoint test set, the performance of the deep models achieves 96.36% accuracy on Indian Pines data, 99.73% on Pavia University data, 98.29% on University of Houston data, 99.43% on Botswana data, and 99.88% on Salinas data.Keywords
Hyperspectral Imaging (HSI) plays a pivotal role in various domains such as remote sensing [1], earth observation [2,3], urban planning [4], agriculture [5,6], forestry [7], target/object detection [8,9], mineral exploration [10], environmental monitoring [11,12], climate change [13] food processing, bakery products, bloodstain identification, and meat processing.
Hyperspectral (HS) remote sensing plays a crucial role in urban planning by providing detailed insights and tools for efficient and informed decision-making [14]. HS remote sensors capture and analyze high-resolution spectral data across numerous narrow and contiguous spectral bands, offering comprehensive information on the composition and characteristics of urban environments [15]. HS data enables precise identification and mapping of various urban land cover types, such as vegetation, impervious surfaces, and soil [16]. Additionally, HS Imagining (HSI) facilitates the detection and monitoring of changes in land use, vegetation health, and pollution levels within urban areas [17]. These capabilities enhance urban planners’ ability to assess the impact of urbanization, analyze urban metabolism, and evaluate the effectiveness of sustainability measures. By covering the entire processing chain, from data acquisition to analysis, HS remote sensing serves as a valuable tool for urban planners seeking a deeper understanding of urban environments and their dynamics.
HSI presents both challenges and opportunities for effective classification [18,19]. In recent years, Convolutional Neural Networks (CNNs) [20], Attention Graph [21,22], and Spatial-Spectral Transformers [23,24] have demonstrated remarkable success in various tasks, prompting researchers to explore their potential in HSI analysis [25]. However, achieving robust and reliable classification results requires careful consideration of data sampling techniques [26]. Random sampling for data splitting can lead to several issues. It can result in non-representative training, validation, and test sets, causing models to overfit or underfit. Different random splits produce inconsistent results, making it hard to draw meaningful conclusions [27]. Random sampling offers no control over data distribution, introducing bias in imbalanced datasets [28]. It hinders the reproducibility of experimental results and limits the exploration of data relationships. To address these challenges, disjoint sampling is a crucial yet often overlooked consideration when evaluating spatial-spectral Hyperspectral Image Classification (HSIC) models. As demonstrated by the works [1,22,29–33], traditional evaluations using overlapping training and test samples can lead to biased results and unfair assessments of model performance.
Even though several methodologies meticulously employ disjoint sets for training and testing their models, there’s a notable inconsistency in their approach when it comes to generating land-cover maps [22,30,32]. Specifically, many of these methods deviate from the disjoint sampling principle by utilizing the entire dataset for HSIC (Thematic Maps). This practice introduces a conflict between the reported accuracy and the methodology employed. To address this inconsistency, it is essential to advocate for the use of a disjoint test set exclusively for generating land-cover maps. By doing so, the evaluation process aligns more closely with the principles of unbiased model assessment. It ensures that the model is confronted with truly unseen data during the map generation phase, fostering a more accurate representation of its real-world performance.
Moreover, disjoint sampling is essential for training and evaluating deep models [34,35]. This method involves carefully selecting diverse and representative samples from various regions, land cover types, and environmental conditions to overcome biased or non-representative training data limitations [36]. It ensures the model learns robust features, enhancing classification performance and adaptability to unseen data. Additionally, disjoint sampling facilitates fair and accurate model evaluation by keeping training, validation, and testing samples separate [37]. Furthermore, disjoint sampling is crucial in training SOTA models for HSIC, notably for CNN and Spatial-Spectral Transformer-based models. It enhances generalization, ensures fair evaluation, and enables result interpretability. The use of disjoint training, validation, and test samples is imperative in HSIC for various reasons, such as:
Unbiased Evaluation: It is crucial to evaluate HSIC models using completely separate and disjoint data for training, validation, and testing in order to properly assess a model’s true ability to generalize to new unknown examples [1,29].
Preventing Data Leakage and Mitigating Overfitting: Maintaining disjoint samples for training, validation, and testing is crucial to obtaining an accurate evaluation of a model’s true generalization performance [22,37]. Employing disjoint subsets of the data at each stage of model development is pivotal in augmenting generalization performance. Through iterative training on distinct partitions, the model is compelled to infer underlying patterns shared across diverse examples, rather than being influenced by potentially misleading idiosyncrasies within a single fixed training sample [38,39]. This practice discourages the memorization of irrelevant characteristics specific to individual data samples. Instead, it fosters the capability to effectively process a wider range of presentations, including both seen and unseen examples.
Therefore, considering the above, this paper made the following contributions:
1. This paper presents a novel approach for disjoint train, validation, and test splits for HSIC. Ensuring the disjoint splits eliminates data leakage between subsets, which can bias performance evaluations. The proposed technique provides a practical implementation for creating disjoint train, validation, and test splits from ground truth data. This allows researchers to obtain unbiased performance evaluations and reliable comparisons between HSIC models.
2. By offering a standardized approach for creating evaluation splits, the proposed technique enhances the reproducibility and transparency of HSIC research. It fosters a more rigorous and standardized evaluation of classification models. The source code can be accessed at: https://github.com/mahmad00/Disjoint-Sampling-for-Hyperspectral-Image-Classification (accessed on 14 June 2024).
Let’s consider HSI composed of B spectral bands, each with a spatial resolution of
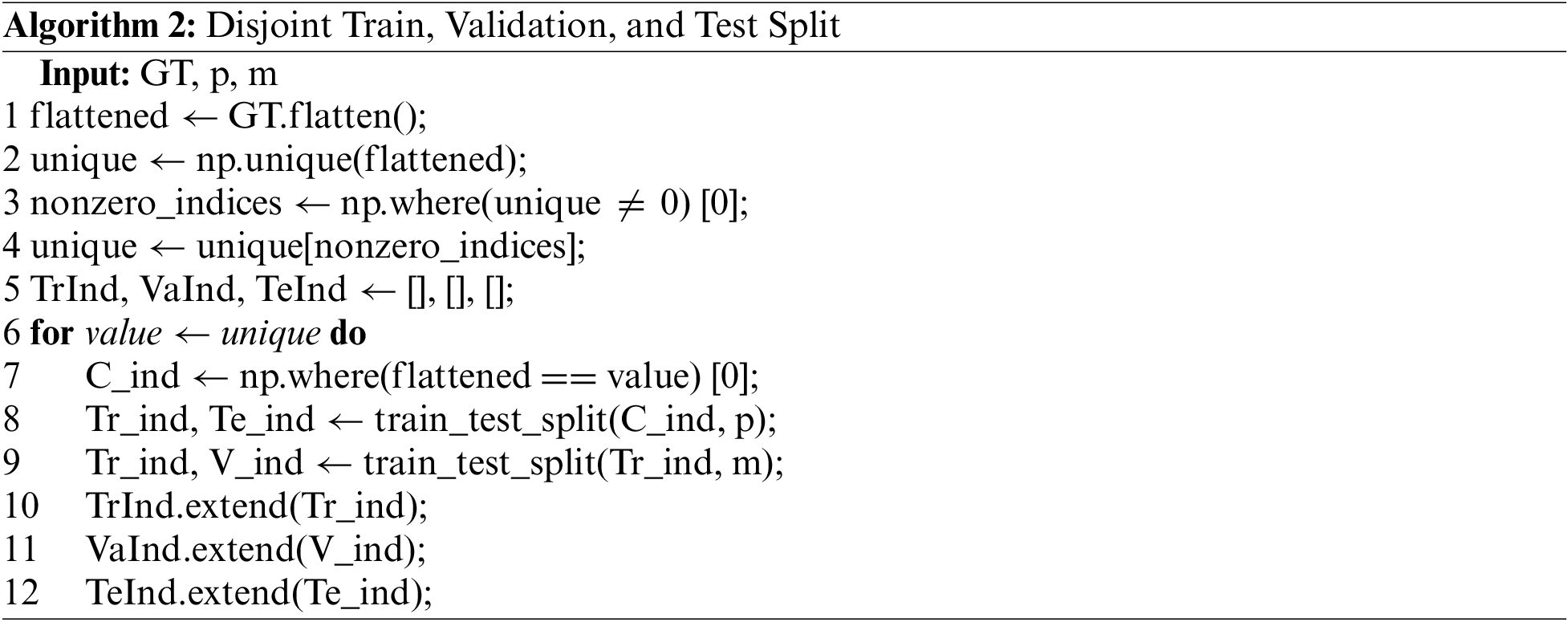
The 3D patches extracted from the HSI are used to generate separate training, validation, and test sets using the proposed splitting algorithm. The key algorithm, titled “Disjoint Train, Validation, and Test Split”, handles dividing the HSI data into the respective portions. It takes the Ground Truth (GT) labels and ratios for the test and validation sets (teRatio and vrRatio) as inputs. The unique values in the GT labels and their frequency counts are identified, excluding zeros (background pixel labels). An iterative process is then used to create disjoint training, validation, and test sets based on these unique values and their indices. The resulting indices are utilized to extract and organize the corresponding Hyperspectral cubes and labels for each set. This ensures the subsets are separate while maintaining the integrity of spectral classes during model training and evaluation. The algorithm outputs the training, validation, and test samples along with their matching class labels. This partitioning approach contributes to the robustness and reliability of the subsequent analysis.
Let us consider that
where
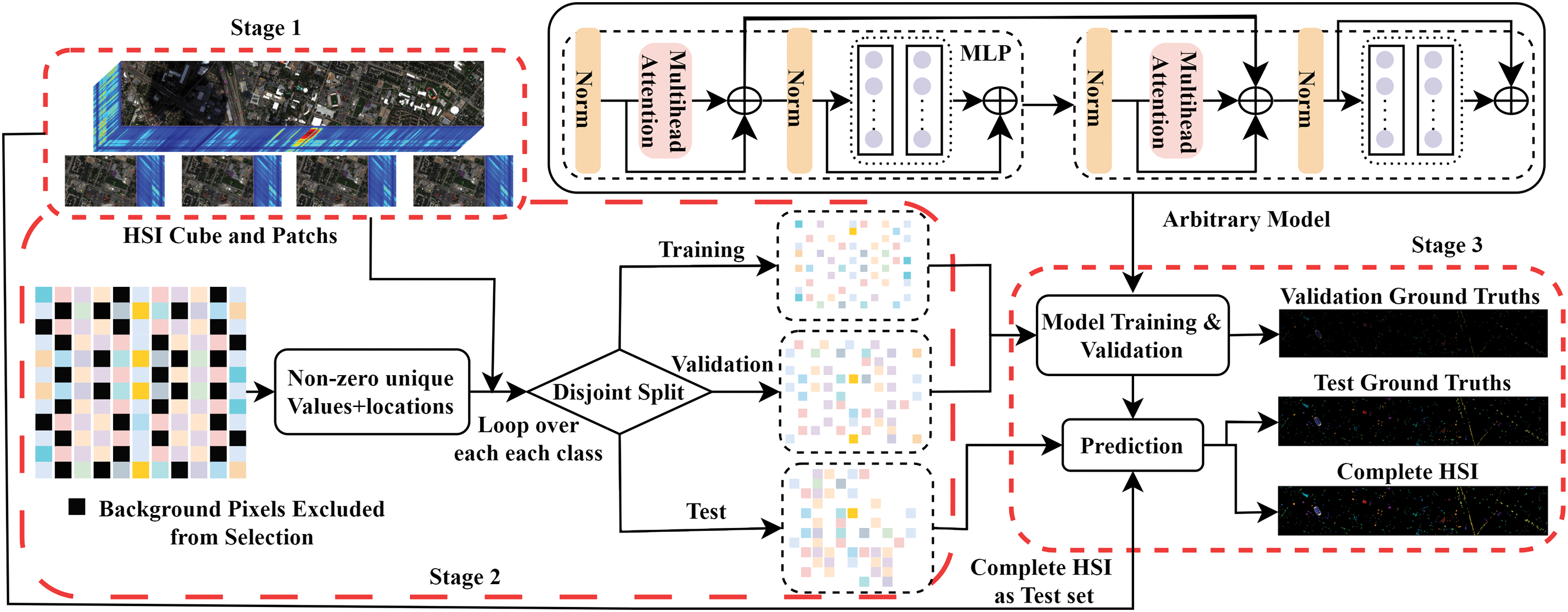
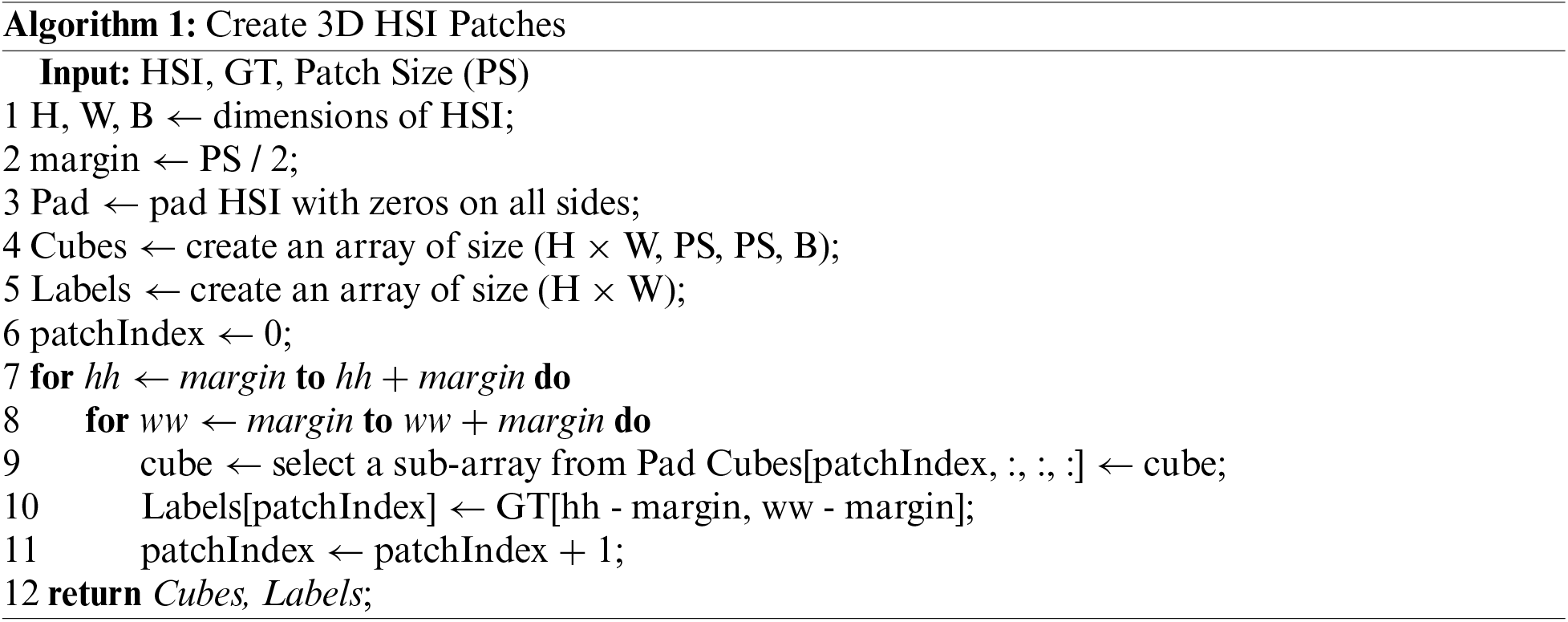
Figure 1: Initially, the HSI cube is divided into overlapping 3D patches, as detailed in Algorithm 1 and Stage 1. Each patch is centered at a spatial point and spans a
As shown in Fig. 1, Stage 1: 3D Patch Extraction: The HSI cube is initially divided into overlapping 3D patches. Each patch is centered at a spatial point and spans a
The above disjoint samples (as explained in Algorithm 2) are then processed by the baseline 2D, 3D CNN, and Spatial-Spectral Transformer models [41,42]. In a 2D CNN, the input data undergoes convolution with a 2D kernel function, resulting in the computation of the dot product between the input and the kernel function. The kernel is then applied in a strided manner over the input to cover the entire spatial dimension. Subsequently, the convolved features are subjected to an activation function, which introduces non-linearity into the model, aiding in the learning of non-linear features from the data. For 2D convolution, the activation value of the
where
where all the parameters are the same as defined in Eq. (5) except
For the Spatial-Spectral Transformer model [44–46], consider
Given a query matrix
Then calculate the concatenate the outputs from all heads as
where
where
Eq. (10) adds the attention output
Eq. (11) computes the output of the attention mechanism in the l-th layer through an MLP. The MLP consists of two linear layers with a ReLU activation function applied between them. The output of the MLP is added to the normalized attention output and normalized again as:
Eq. (12) adds the output
3 Experimental Results and Discussion
In order to highlight the importance and the proposed procedure of disjoint sampling in HSIC, the following datasets are used.
The University of Houston: The University of Houston dataset consists of 144 spectral bands spanning wavelengths from 380 to 1050 nm, the dataset encompasses an imaged spatial region measuring
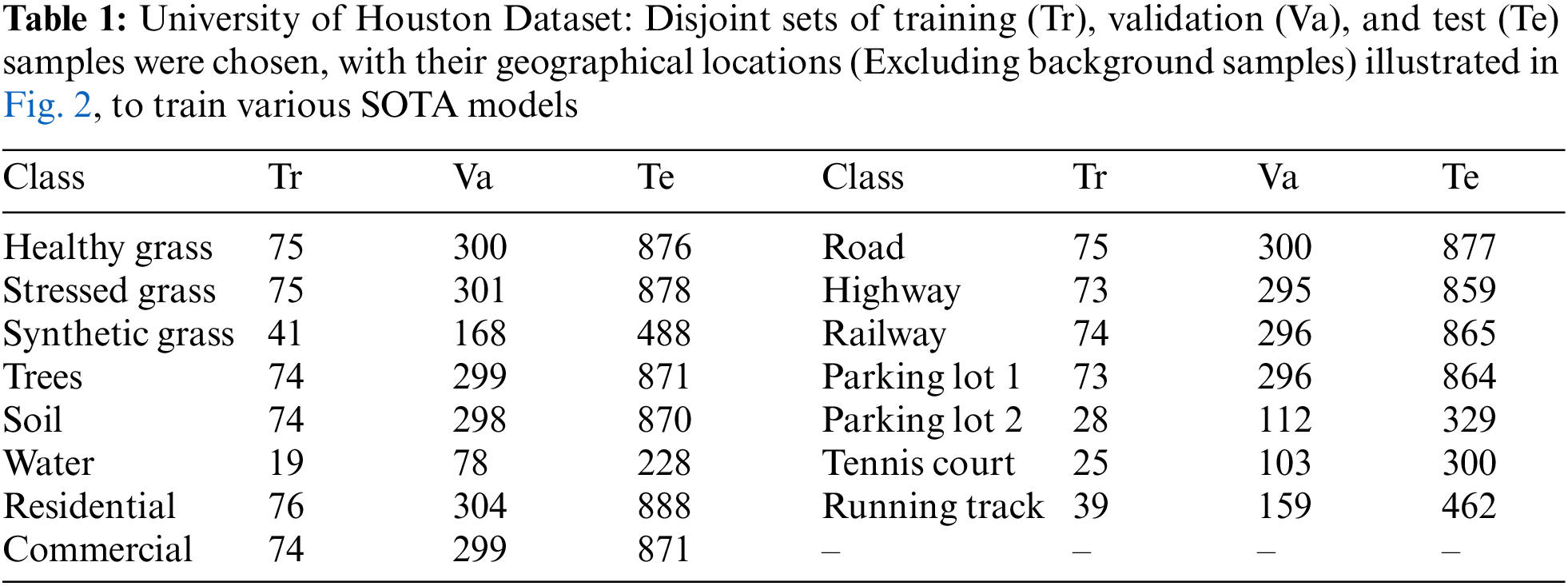

Figure 2: The University of Houston Dataset: Geographical locations of the disjoint train, validation, and test samples presented in Table 1
Indian Pines: The Indian Pines dataset was collected by the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) over an agricultural site in Northwestern Indiana. It consists of

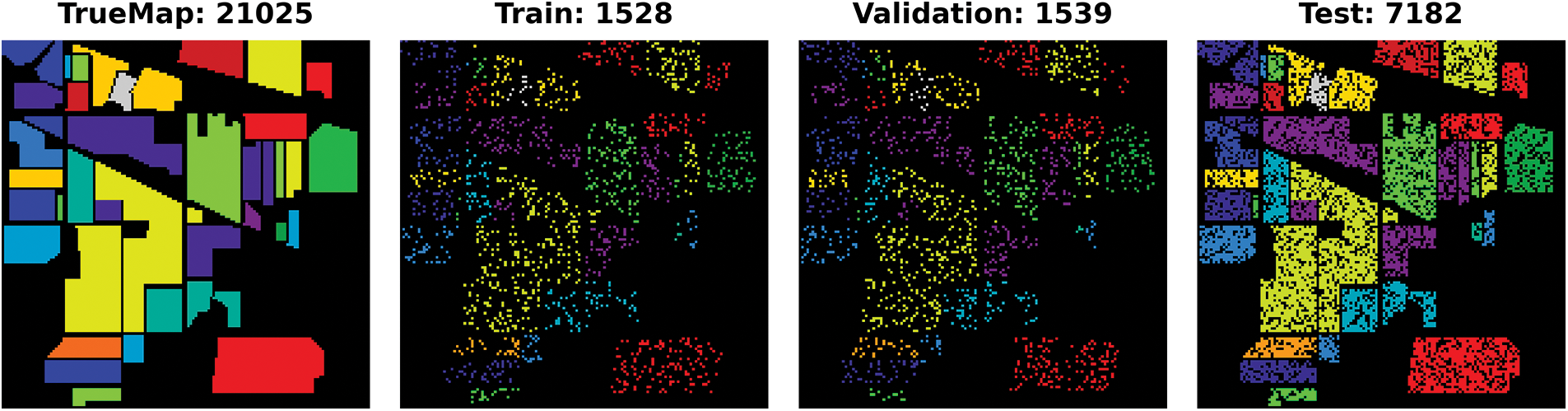
Figure 3: Indian Pines: Geographical locations of the disjoint train, validation, and test samples presented in Table 2
Pavia University: The Pavia University dataset was captured using the Reflective Optics System Imaging Spectrometer (ROSIS), this dataset consists of an image with

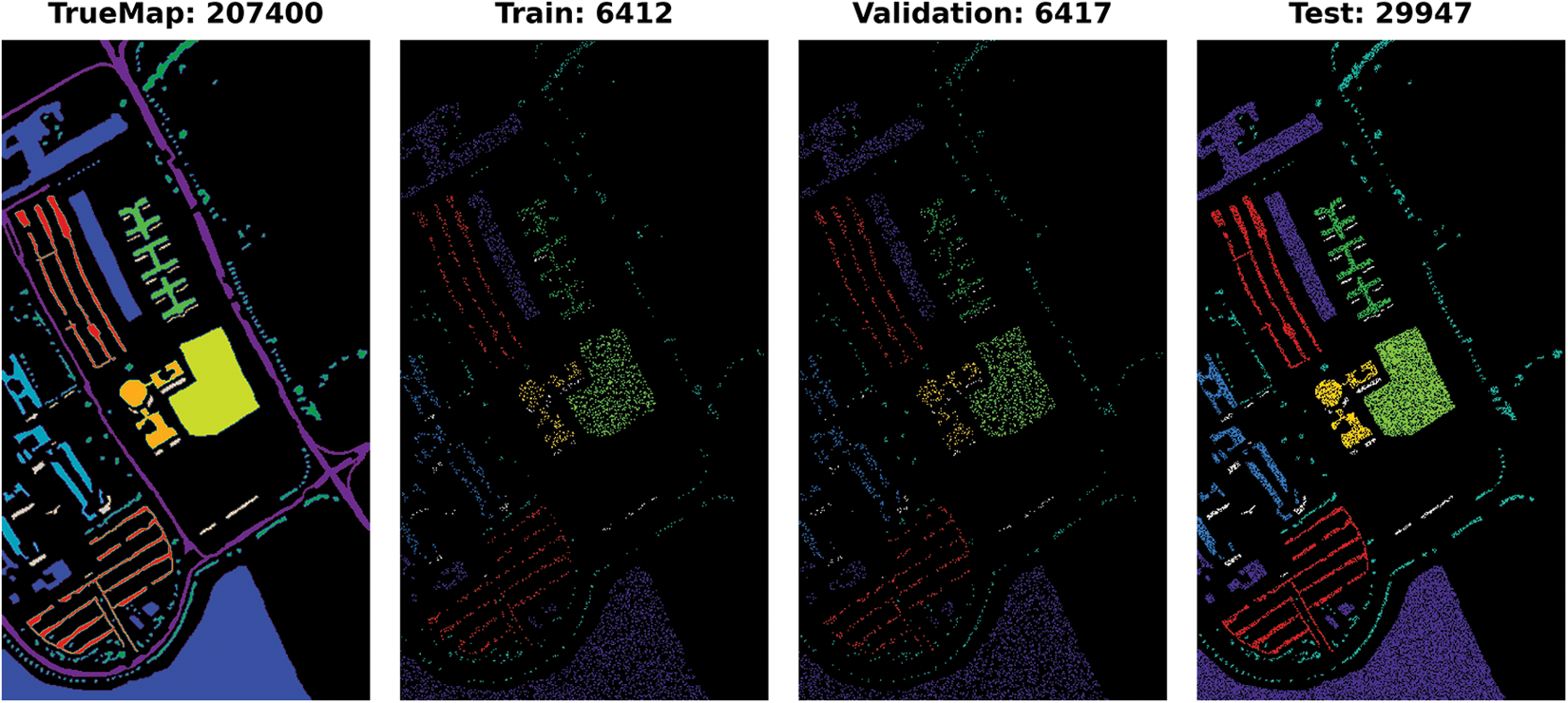
Figure 4: Pavia University Dataset: Geographical locations of the disjoint train, validation, and test samples presented in Table 3
Salinas: The Salinas dataset is collected using the 224-band AVIRIS sensor over Salinas Valley, California, this dataset is characterized by high spatial resolution at 3.7 m per pixel. The study area encompasses 512 lines by 217 samples after removing 20 bands obscured by water absorption. Land cover types within the dataset include vegetables, bare soils, and vineyard fields. The Salinas ground truth annotates 16 classes. The disjoint train, validation, and test samples are presented in Table 4 and Fig. 5.
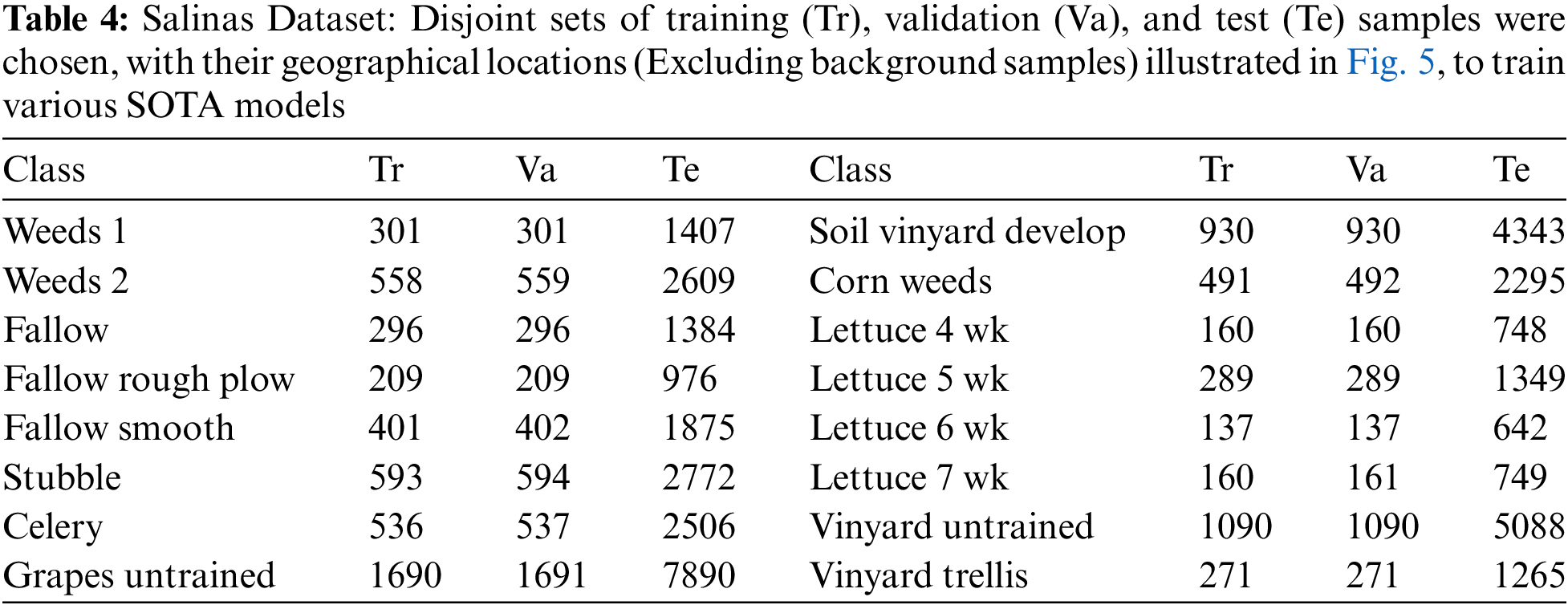
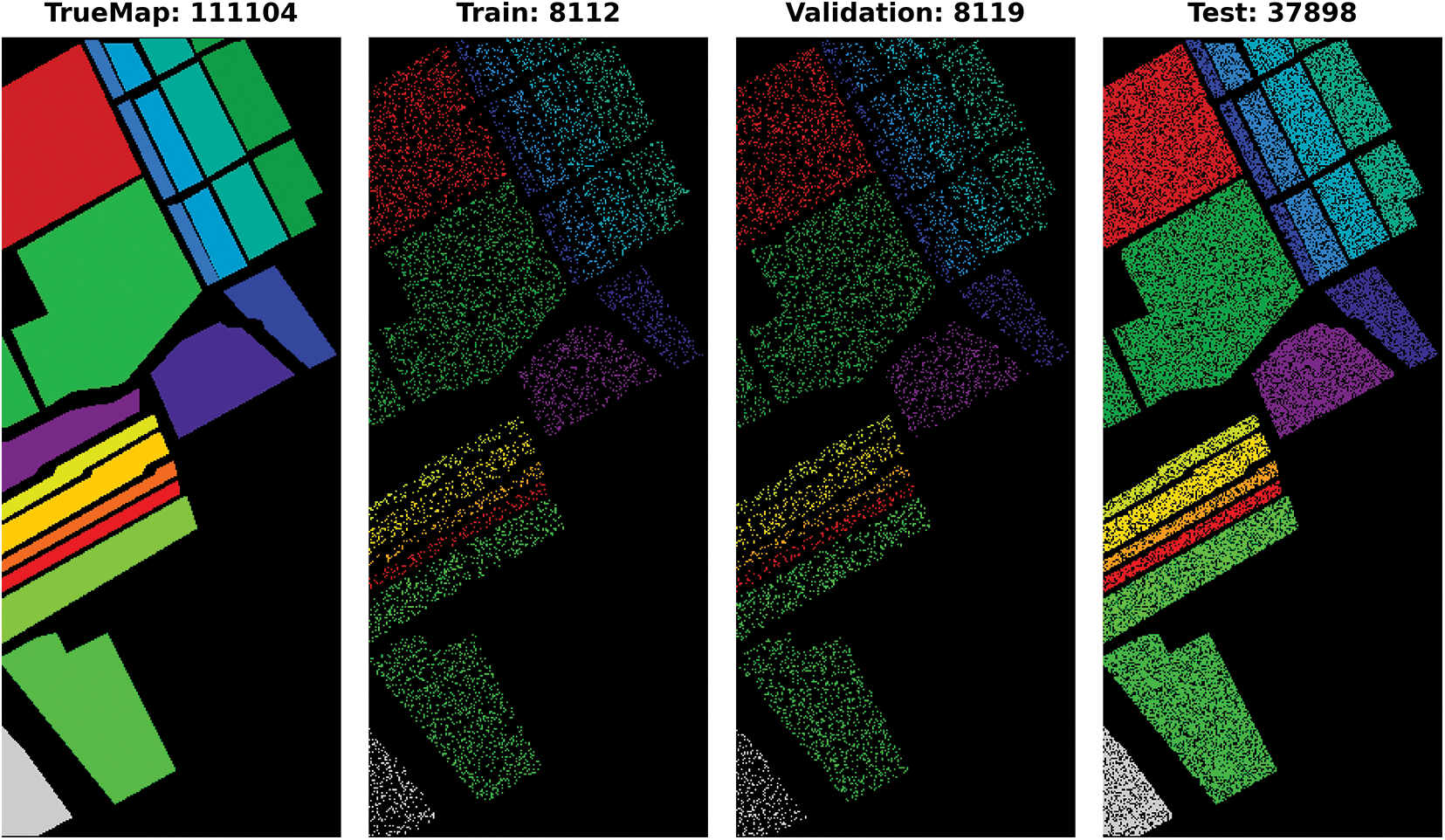
Figure 5: Salinas Dataset: Geographical locations of the disjoint train, validation, and test samples presented in Table 4
Botswana: The NASA EO-1 satellite acquired Hyperspectral imagery of the Okavango Delta region in Botswana from 2001–2004 using the Hyperion sensor to collect 30 m resolution data across 242 bands from 400–2500 nm over a 7.7 km strip. The data analyzed from 31 May, 2001, consisted of observations of 14 land cover classes representing seasonal swamps, occasional swamps, and drier woodlands in the distal delta region after preprocessing removed uncalibrated and noisy bands covering water absorption and retaining 145 bands. The disjoint train, validation, and test samples are presented in Table 5 and Fig. 6.
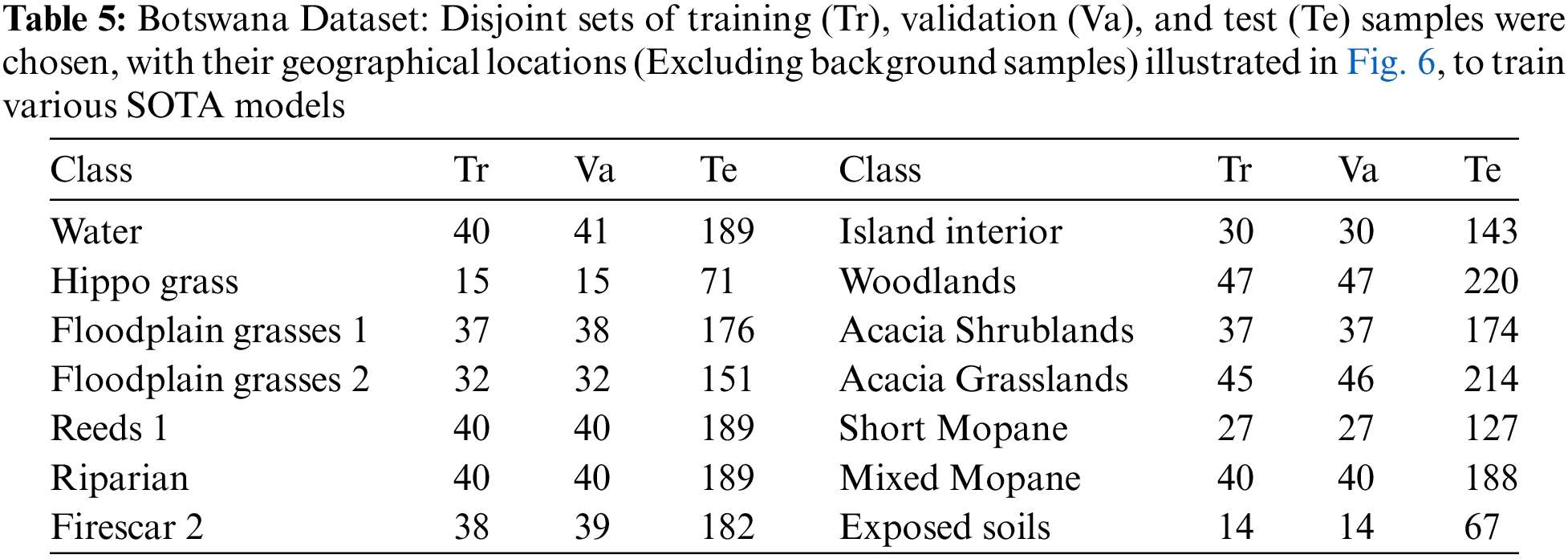
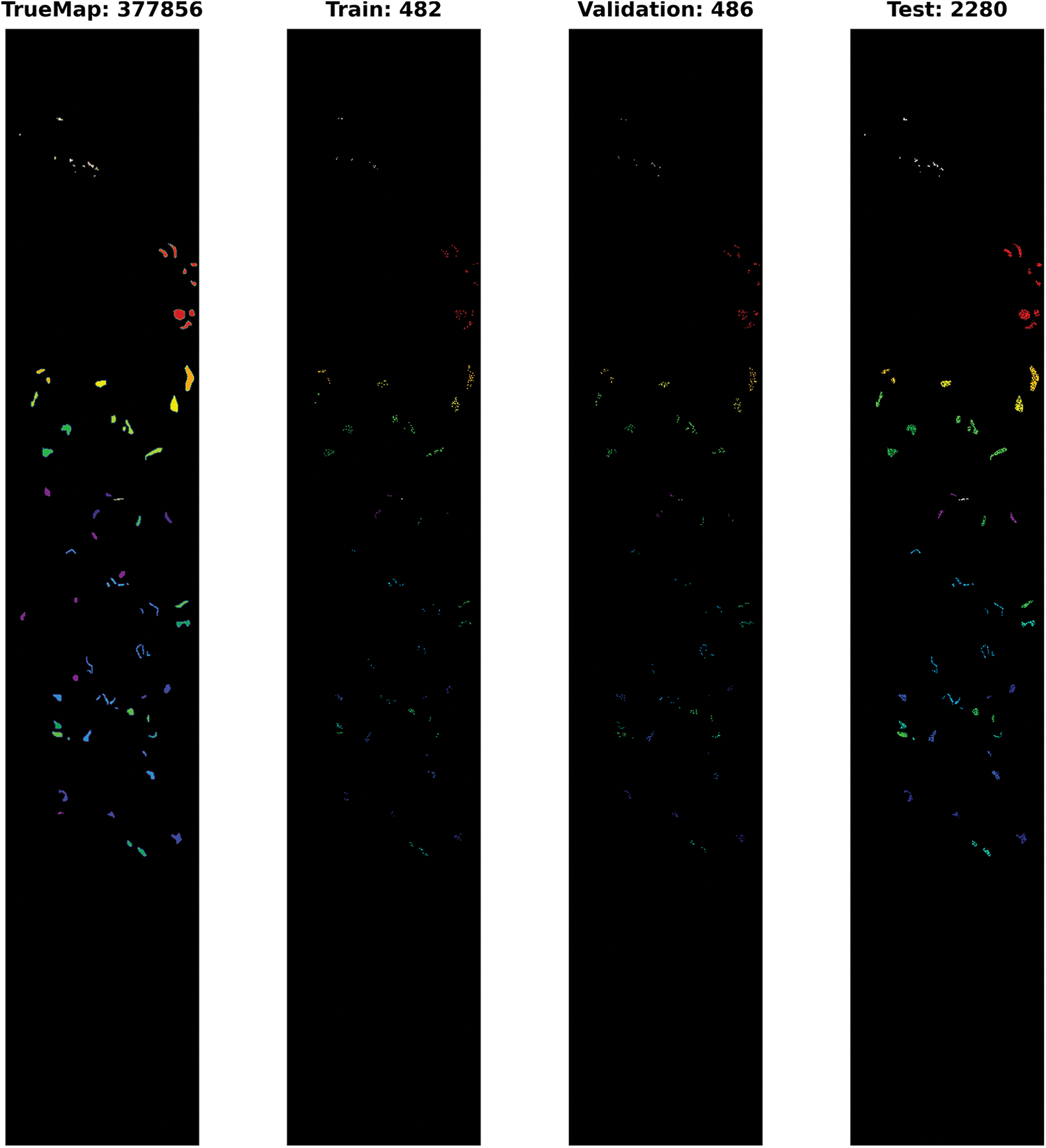
Figure 6: Botswana Dataset: Geographical locations of the disjoint train, validation, and test samples presented in Table 5
This section presents comprehensive experimental settings for various deep learning models, including 3D CNN [20], Hybrid Inception Net [47], 3D Inception Net [48], 2D Inception Net [49], 2D CNN [50], Hybrid CNN [51], Attention Graph CNN [22]. Spatial-spectral Transformer [24]. Prior to training, 3D overlapped patches are extracted using an
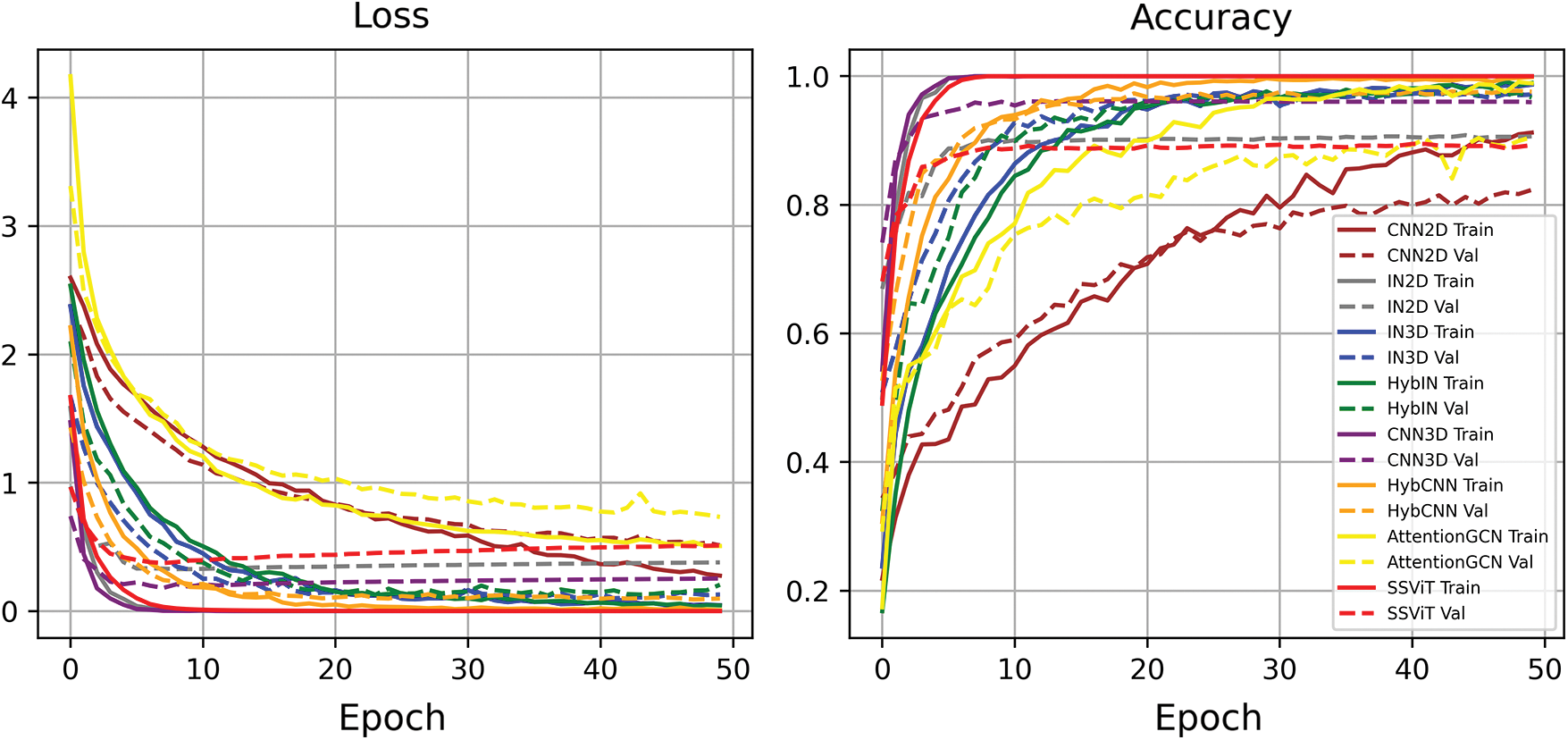
Figure 7: Loss and Accuracy trends for all the competing methods for Indian Pines dataset
All evaluations were conducted on a Google Colab, using a Jupyter Notebook. Colab works on online resources and requires a fast and stable internet connection. Colab works on a Python 3 notebook with a graphic processing unit (GPU) for data analysis, offering 25 GB of random access memory (RAM) and 358 GB of storage.
All the competing methods are tested with a patch size of
The 2D CNN model is trained using four convolutional layers with kernel sizes of
The 2D Inception Net architecture consists of three blocks with the following configurations. In the first block, three 2D convolutional layers are used. The first layer employs a
The 3D Inception Net architecture consists of three blocks with the following configurations. In the first block, three 3D convolutional layers are used. The first layer employs a
The hybrid Inception Net architecture consists of three blocks with the following configurations. In the first block, three 3D convolutional layers are used. The first layer has a
The Attention Graph CNN [22] and Spatial-Spectral Transformer [24] models are trained according to the settings specified in their respective papers. The Transformer model, in particular, is used without the wavelet transformation and consists of 4 layers with 8 heads to compute the final maps. A dropout rate of 0.1 is applied to the classification layers. For more detailed information, please refer to the original papers.
3.3 Qualitative and Quantitative Results and Discussion
This section provides a detailed exploration of experimental results in comparison to the state-of-the-art (SOTA) works published in recent years. While many recent research endeavors present extensive experimental outcomes to highlight the strengths and weaknesses of their approaches, it is noteworthy that the experimental results in the literature may follow diverse protocols. For instance, the selection of training, validation, and test samples might be randomly done, and the percentage distribution may be identical. However, there could be variations in the geographical locations of each model, as these models may have undergone training, validation, and testing at different times. Comparative models may have been executed in multiple instances, either sequentially or in parallel, introducing a new set of training, validation, and test samples with the same number or percentage. Consequently, to ensure a fair comparison between the works proposed in the literature and the current study, it is imperative to employ identical experimental settings and execute them with the same set of training, validation, and test samples. This approach ensures a consistent and unbiased evaluation of the proposed methodologies against existing benchmarks.
A prevalent concern in the majority of recent literature is the presence of overlapping training and test samples. When training and validation samples are randomly selected, with or without considering the point mentioned earlier, the data split often includes overlapping samples. This situation introduces bias to the model, as overlapping implies the model has already encountered the training and validation samples, leading to inflated accuracy metrics. To prevent this issue, this study ensures that, despite the random selection of samples, the intersection between training, test, and validation samples remains consistently empty for all competing methods. This measure aims to maintain the integrity of the model evaluation process and uphold the reliability of accuracy assessments.
To ensure a robust and fair evaluation, the datasets are split into disjoint training, validation, and test sets. Following the proposed method, we begin by dividing the HSI dataset into disjoint training, validation, and test sets. Each model is then trained on the training set and tuned on the validation set to optimize performance. Subsequently, the models are evaluated on the disjoint test set and the complete HSI dataset to assess their generalization capabilities. The experimental results demonstrate the effectiveness of the proposed method in improving the classification accuracy of HSIC as shown in Tables 6–10 and Figs. 8–12. Among the deep learning models considered, 3D CNN [20] and Hybrid Inception Net [47] achieve the highest classification accuracy, indicating their suitability for HSIC. Additionally, the results highlight the importance of using a large and diverse training dataset to achieve optimal performance.
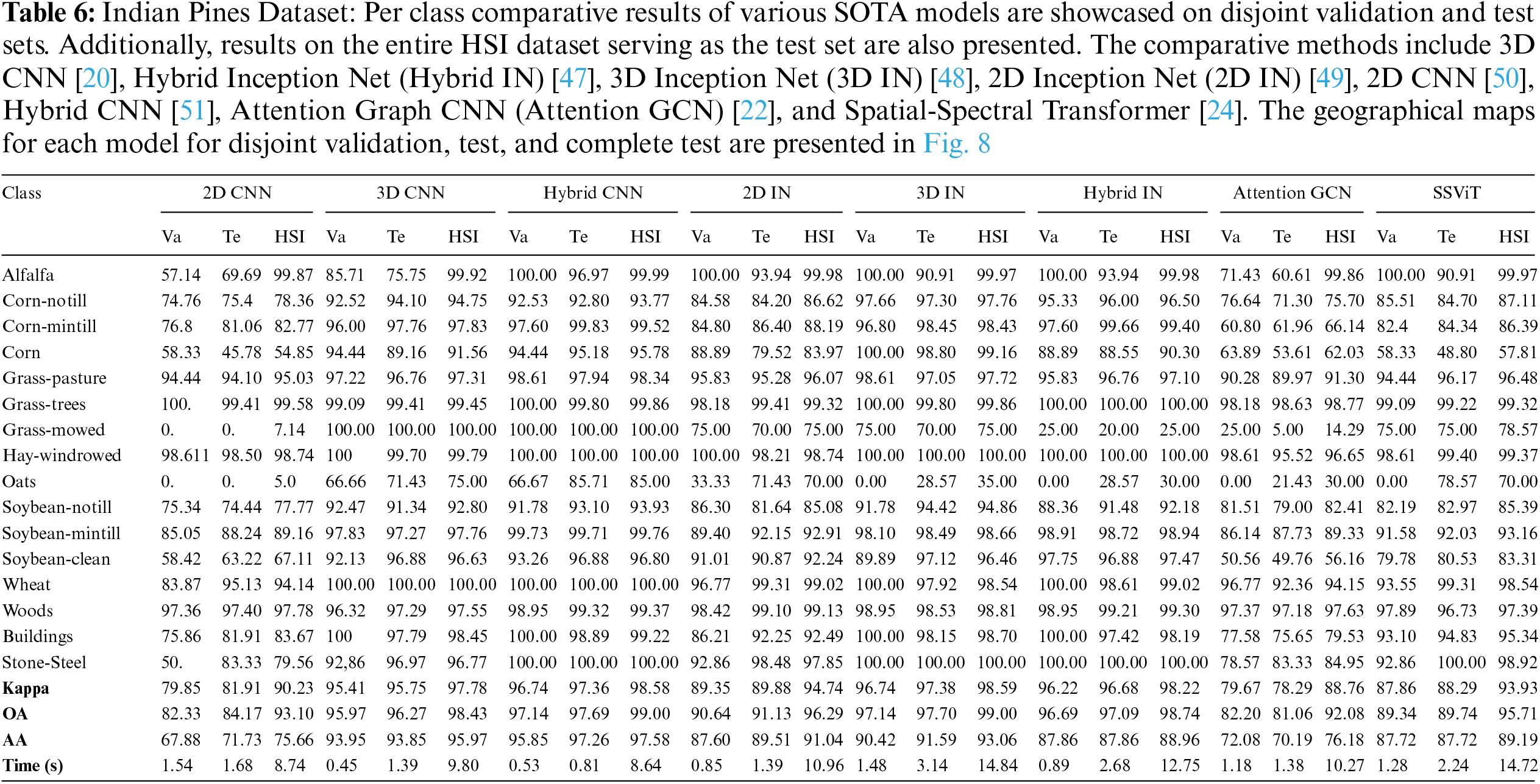
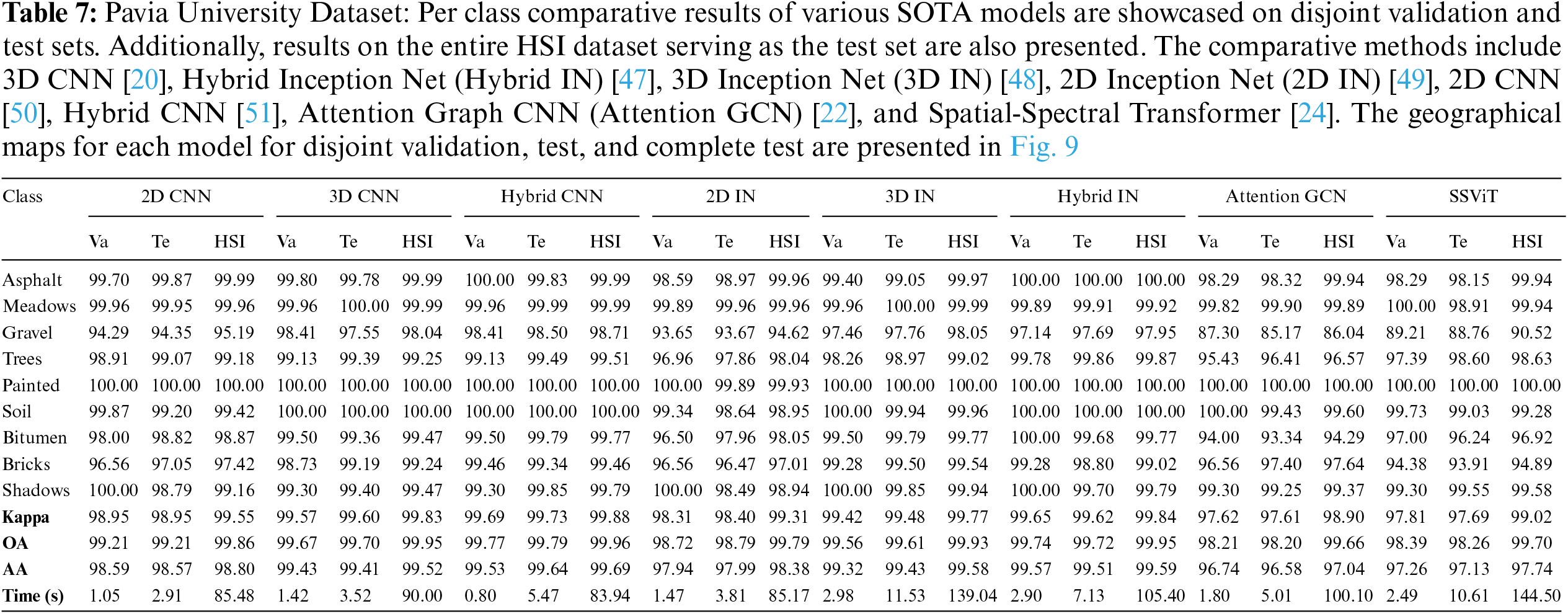
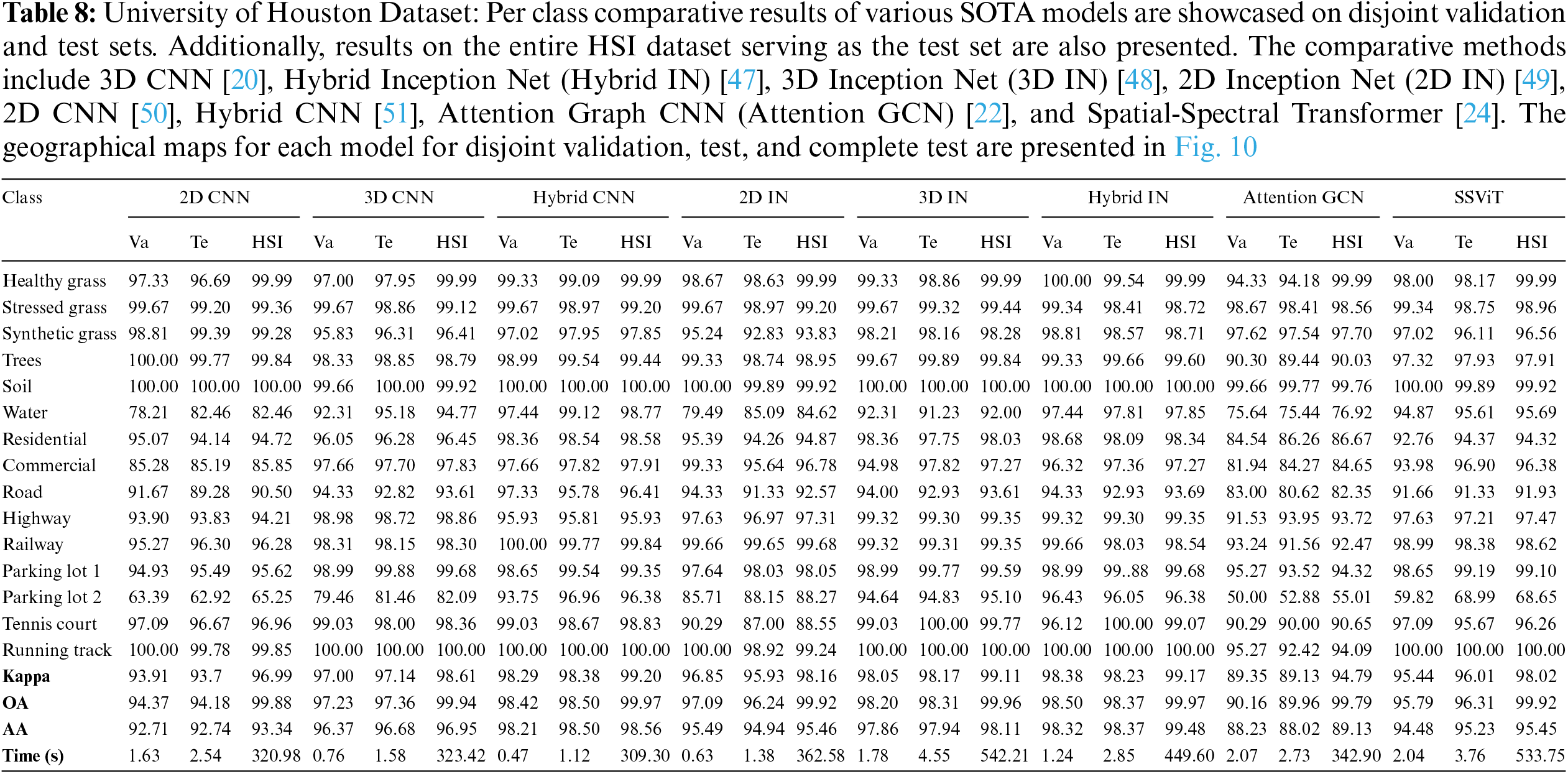
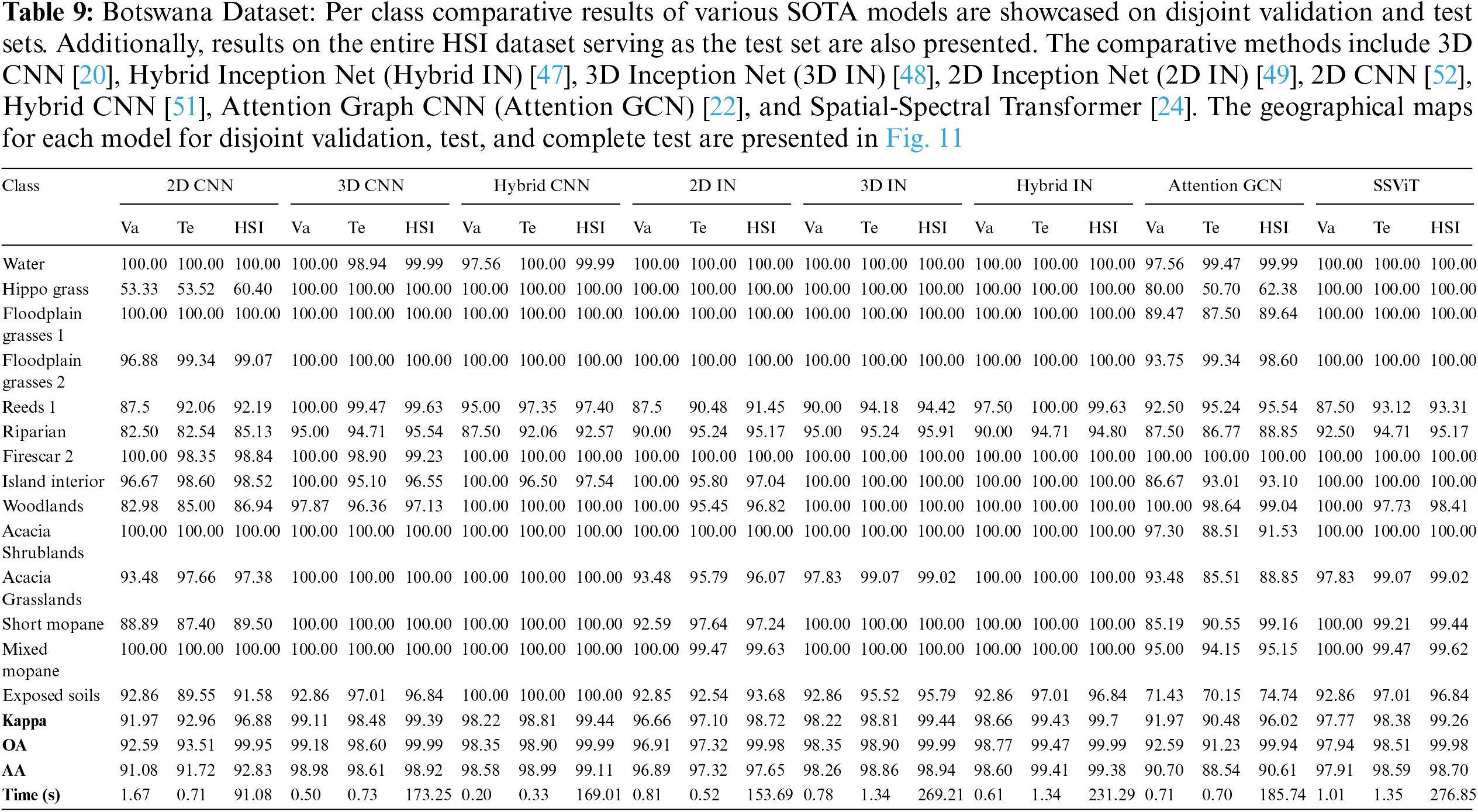
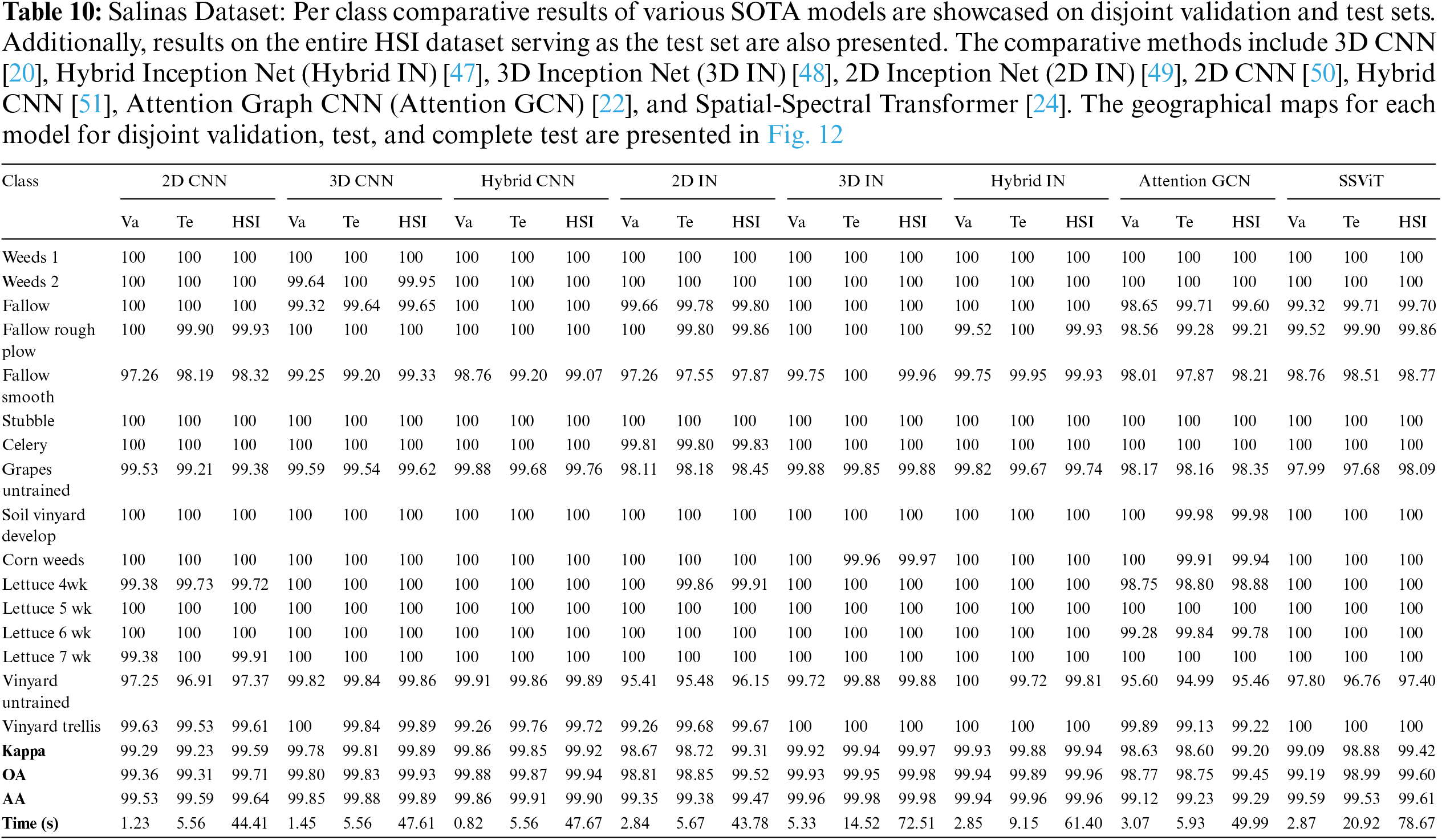

Figure 8: Indian Pines Dataset: Land cover maps for disjoint validation, test, and the entire HSI used as a test set are provided. Comprehensive class-wise results can be found in Table 6
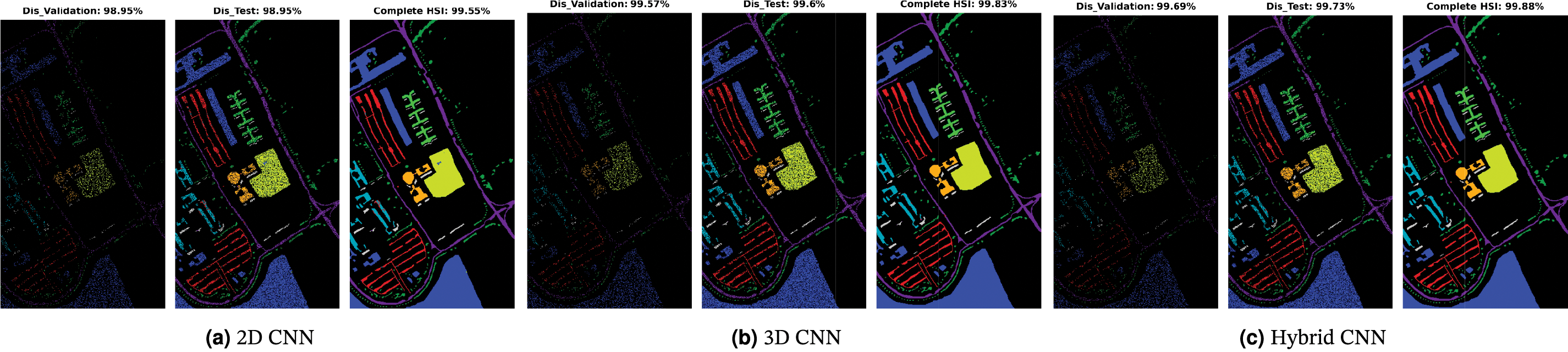
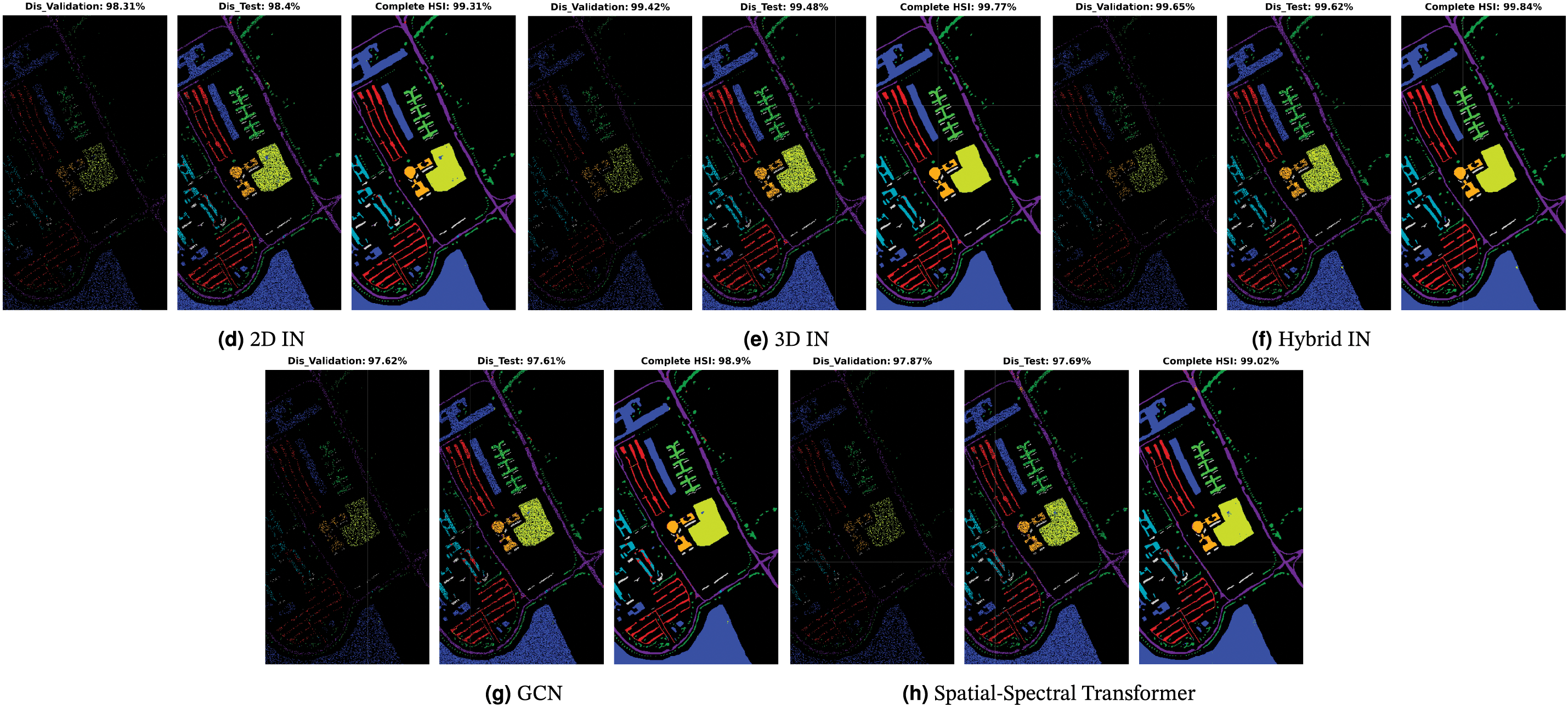
Figure 9: Pavia University Dataset: Land cover maps for disjoint validation, test, and the entire HSI used as a test set are provided. Comprehensive class-wise results can be found in Table 7
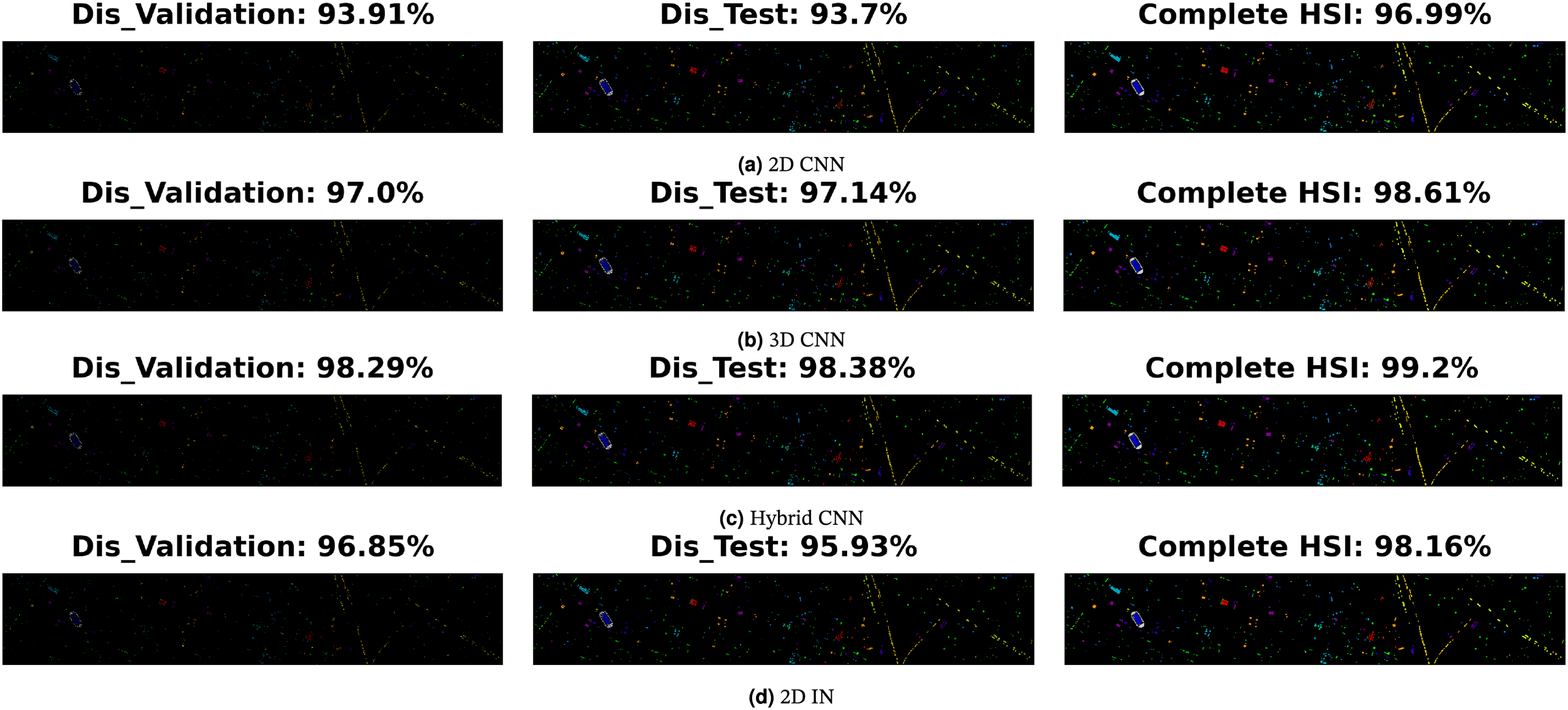
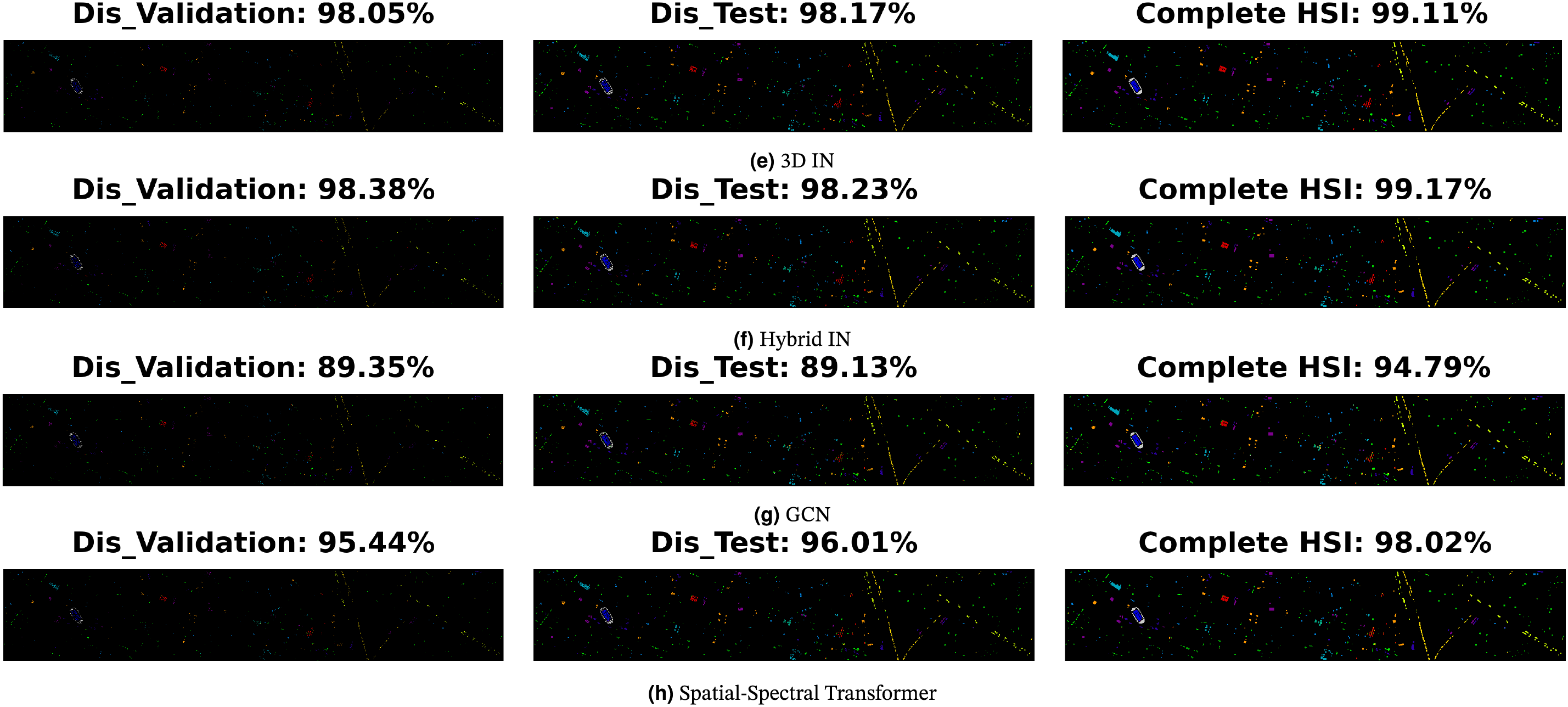
Figure 10: University Houston Dataset: Land cover maps for disjoint validation, test, and the entire HSI used as a test set are provided. Comprehensive class-wise results can be found in Table 8
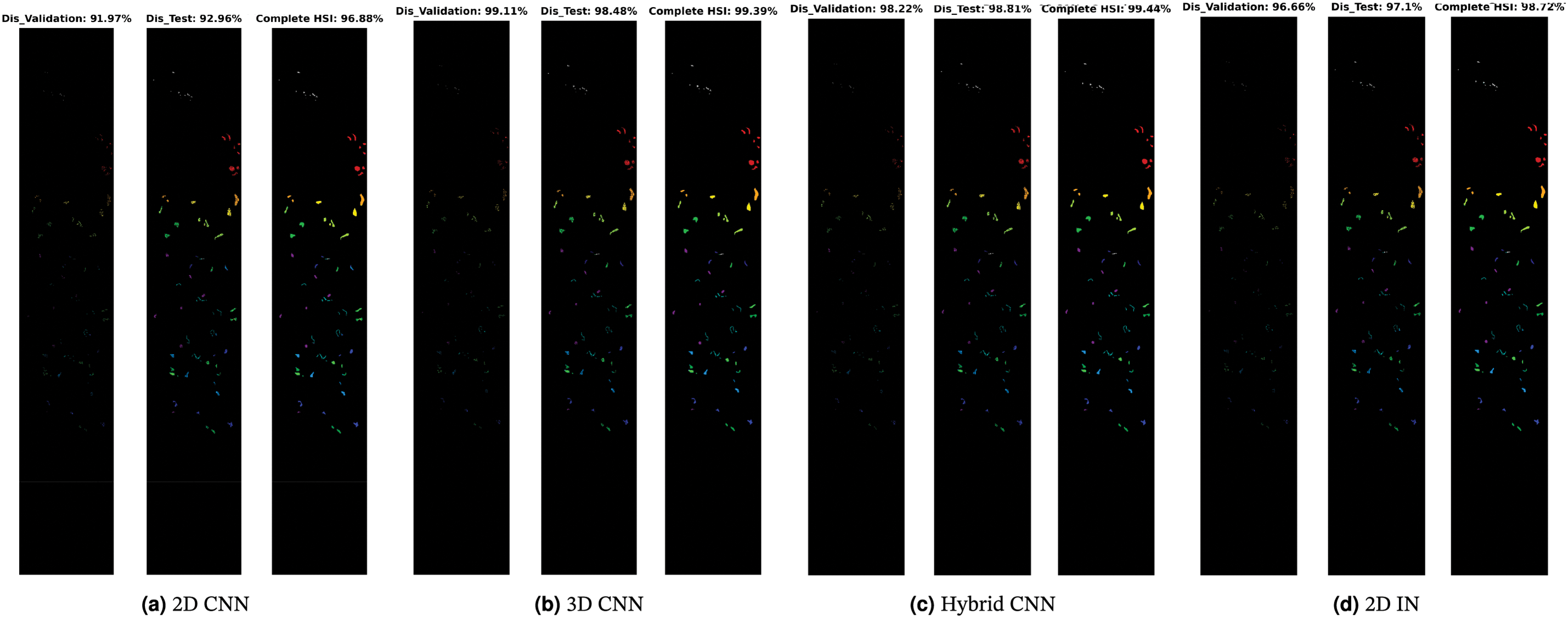
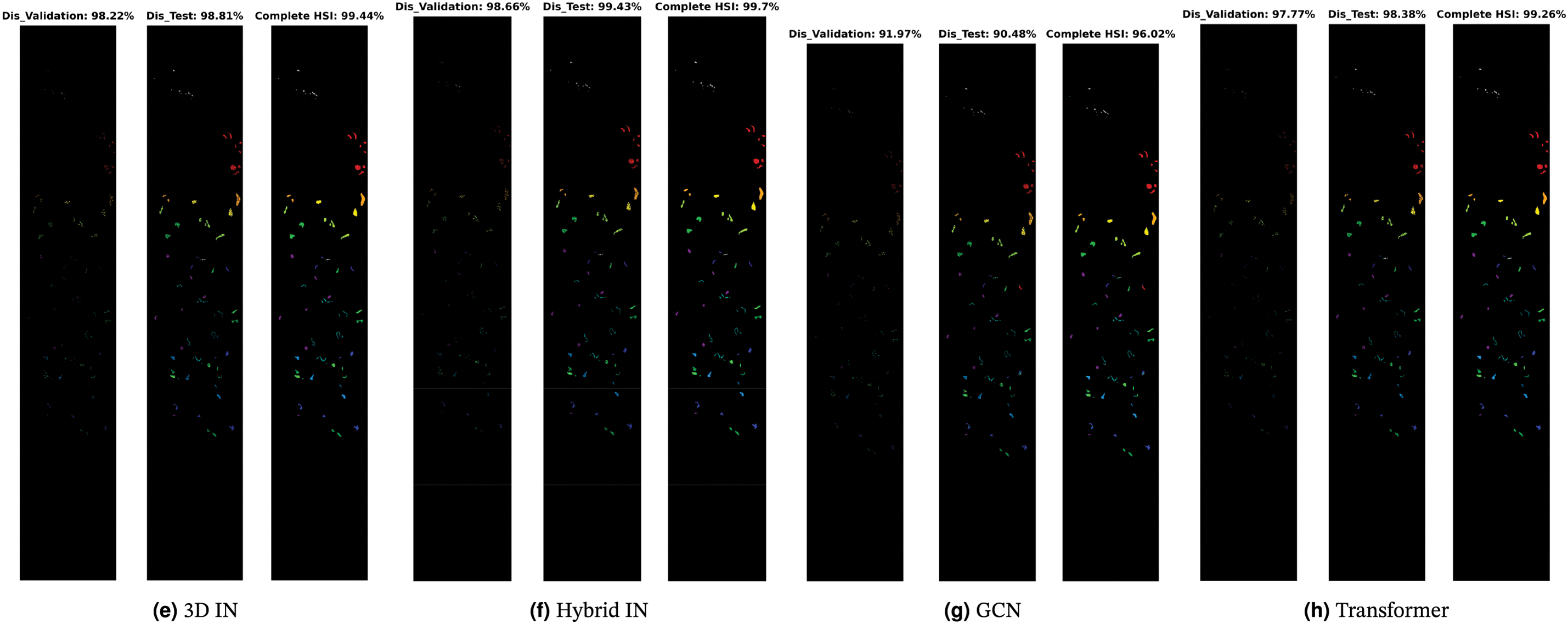
Figure 11: Botswana Dataset: Land cover maps for disjoint validation, test, and the entire HSI used as a test set are provided. Comprehensive class-wise results can be found in Table 9
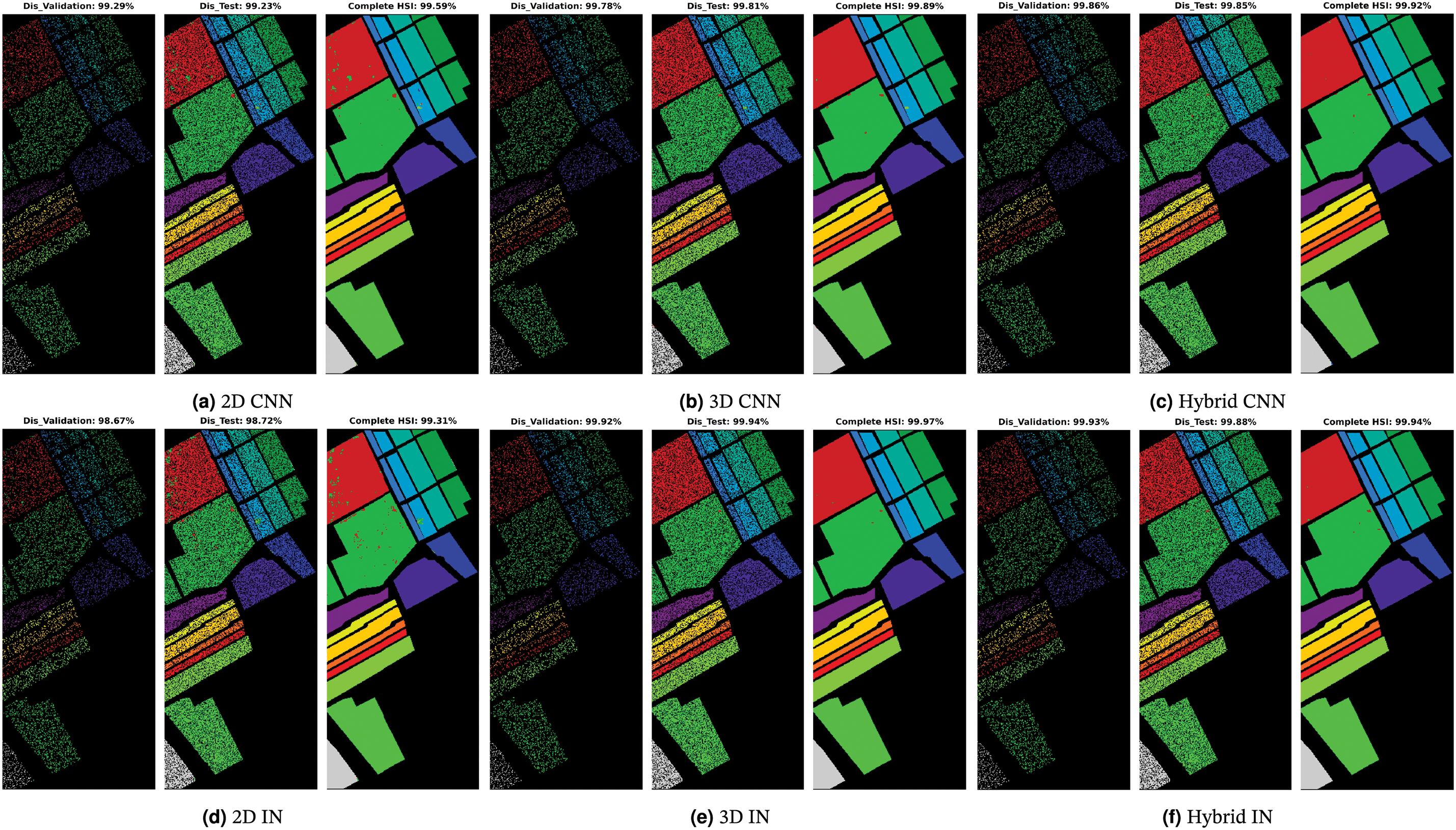
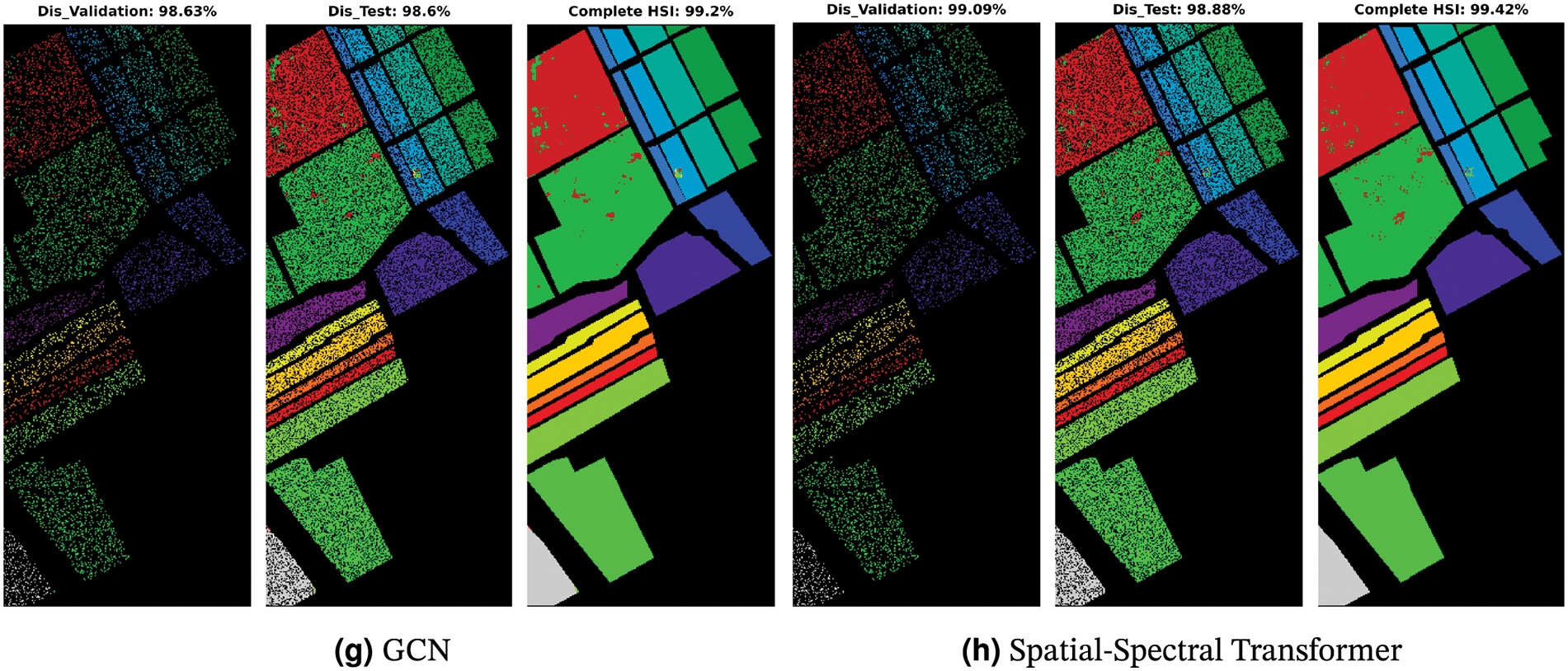
Figure 12: Salinas Dataset: Land cover maps for disjoint validation, test, and the entire HSI used as a test set are provided. Comprehensive class-wise results can be found in Table 10
The comparative methods frequently misclassify samples with similar spatial structures, exemplified by the misclassification of Meadows and Bare Soil classes in the Pavia University dataset, as illustrated in Fig. 9. Furthermore, the overall accuracy (OA) for the Grapes Untrained class is lower compared to other classes due to the aforementioned reasons as shown in Table 7. In summary, higher accuracy can be attained by employing a higher number of labeled samples (complete HSI dataset as the test set), as depicted in Figs. 8–12 and Tables 6–10, nevertheless, the elevated accuracy is accompanied by the drawbacks of bias, redundancy, and diminished generalization performance. Tables 6–10 also illustrate the computational time required to process and evaluate the HSI datasets used in this study. As depicted in the Tables, the time exhibits a gradual increase with the growing number of samples, i.e., Disjoint validation, disjoint test, and complete HSI dataset as a test set.
Average, overall, and Kappa accuracy may not always be appropriate measures, especially when there are significant differences in the number of samples in each class within a dataset. To clarify this point, consider the following scenario. Suppose we have a dataset with 90 healthy (positive) individuals and 10 not-healthy (negative) individuals. If a conventional model correctly predicts 90% of individuals as healthy, it might still predict the not-healthy individuals as healthy. What would be the best accuracy in this scenario?
In this setting, the model identifies 10 individuals as “False Negative”, 0 as “True Positive”, 0 as “False Positive”, and 90 as “True Negative”. Thus, the average accuracy would be 90%, i.e.,
Several statistical tests can be used to validate the results. For this work, we consider Recall (True Positive Rate or Sensitivity), Precision (Positive Predictive Value, PPV), and F1 score (a harmonic mean of precision and recall). In an ideal scenario, PPV should be 1, which occurs when the numerator and denominator are equal, i.e., when True Positive (TP) equals TP + False Positive (FP), making FP equal to 0. As FP increases, PPV decreases, leading to an inappropriate model. A similar trend can be observed for Recall, where False Negative (FN) replaces FP. Recall and PPV can be computed as follows:
For a classification model to be effective, both Precision (Positive Predictive Value, PPV) and Recall need to be high, which means that both False Positives (FP) and False Negatives (FN) must be low. In addition to Recall and PPV, the F1 score should also be computed, as it combines both Recall and PPV to provide a single metric that offers statistical significance and deeper insight into the classifier’s generalization performance. The F1 score can be calculated as follows:
A model is considered effective if it achieves high values for PPV, Recall, and the F1 score. These metrics provide a more comprehensive evaluation of the model’s performance compared to using accuracy alone. The detailed statistical results are presented in Table 11.

This paper introduced a novel technique for generating disjoint train, validation, and test splits in Hyperspectral Image Classification (HSIC). By efficiently partitioning the ground truth data, the proposed technique ensured unbiased performance evaluations and facilitated reliable comparisons between classification models. It proved to be a valuable tool for creating disjoint splits, guaranteeing that the subsets were representative of the entire dataset and that the classification results were not skewed by data leakage. While the technique demonstrated significant advantages, limitations were acknowledged, and opportunities for further improvement were identified. Future research could investigate alternative data-splitting strategies that incorporate additional factors, such as class imbalance or spatial coherence, to further enhance the representativeness and generalizability of the subsets. Addressing these aspects could lead to the development of even more robust and effective data-splitting techniques for HSIC.
Acknowledgement: Not applicable.
Funding Statement: The authors extend their appreciation to the Researchers Supporting Project number (RSPD2024R848), King Saud University, Riyadh, Saudi Arabia.
Author Contributions: Study conception and desing: Muhammad Ahmad, Manuel Mazzara, Salvatore Distefano; Analysis and interpretation of results: Muhammad Ahmad, Hamad Ahmed Altuwaijri, Adil Mehmood Khan; manuscript preparation: Muhammad Ahmad, Manuel Mazzara, Salvatore Distefano, Adil Mehmood Khan, Hamad Ahmed Altuwaijri. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used in this study is publicly available and can be accessed from the corresponding data repository https://www.ehu.eus/ccwintco/index.php/Hyperspectral_Remote_Sensing_Scenes (accessed on 2 January 2024). The source code for the experiments conducted in this paper can be accessed at https://github.com/mahmad00/Disjoint-Sampling-for-Hyperspectral-Image-Classification (accessed on 2 May 2024).
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. M. Ahmad et al., “Hyperspectral image classification-traditional to deep models: A survey for future prospects,” IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., vol. 15, pp. 968–999, 2022. doi: 10.1109/JSTARS.2021.3133021. [Google Scholar] [CrossRef]
2. S. Aksoy, E. Sertel, R. Roscher, A. Tanik, and N. Hamzehpour, “Assessment of soil salinity using explainable machine learning methods and landsat 8 images,” Int. J. Appl. Earth Obs. Geoinf., vol. 130, 2024, Art. no. 103879. doi: 10.1016/j.jag.2024.103879. [Google Scholar] [CrossRef]
3. V. Lodhi, D. Chakravarty, and P. Mitra, “Hyperspectral imaging for earth observation: Platforms and instruments,” J. Indian Inst. Sci., vol. 98, no. 4, pp. 429–443, 2018. doi: 10.1007/s41745-018-0070-8. [Google Scholar] [CrossRef]
4. Y. Li, D. Hong, C. Li, J. Yao, and J. Chanussote, “HD-Net: High-resolution decoupled network for building footprint extraction via deeply supervised body and boundary decomposition,” ISPRS J. Photogramm. Remote Sens., vol. 209, no. 1, pp. 51–65, 2024. doi: 10.1016/j.isprsjprs.2024.01.022. [Google Scholar] [CrossRef]
5. T. Jiang, H. van der Werff, F. van Ruitenbeek, A. Dijkstra, C. Lievens and M. van der Meijde, “The influence of changing moisture content on laboratory acquired spectral feature parameters and mineral classification,” Int. J. Appl. Earth Obs. Geoinf., vol. 130, 2024, Art. no. 103884. doi: 10.1016/j.jag.2024.103884. [Google Scholar] [CrossRef]
6. B. Lu, P. D. Dao, J. Liu, Y. He, and J. Shang, “Recent advances of hyperspectral imaging technology and applications in agriculture,” Remote Sens., vol. 12, no. 16, 2020, Art. no. 2659. doi: 10.3390/rs12162659. [Google Scholar] [CrossRef]
7. T. Adão et al., “Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry,” Remote Sens., vol. 9, no. 11, 2017, Art. no. 1110. doi: 10.3390/rs9111110. [Google Scholar] [CrossRef]
8. S. Chen et al., “CDasXORNet: Change detection of buildings from bi-temporal remote sensing images as an XOR problem,” Int. J. Appl. Earth Obs. Geoinf., vol. 130, no. 1, 2024, Art. no. 103836. doi: 10.1016/j.jag.2024.103836. [Google Scholar] [CrossRef]
9. C. Li, B. Zhang, D. Hong, J. Yao, and J. Chanussot, “LRR-Net: An interpretable deep unfolding network for hyperspectral anomaly detection,” IEEE Trans. Geosci. Remote Sens., vol. 61, pp. 1–12, 2023. doi: 10.1109/TGRS.2023.3279834. [Google Scholar] [CrossRef]
10. E. Bedini, “The use of hyperspectral remote sensing for mineral exploration: A review,” J. Hyperspectr. Remote Sens., vol. 7, no. 4, pp. 189–211, 2017. doi: 10.29150/jhrs.v7.4.p189-211. [Google Scholar] [CrossRef]
11. C. Weber et al., “Hyperspectral imagery for environmental urban planning,” in IGARSS 2018—2018 IEEE Int. Geosci. Remote Sens. Symp., IEEE, 2018, pp. 1628–1631. [Google Scholar]
12. M. B. Stuart, A. J. McGonigle, and J. R. Willmott, “Hyperspectral imaging in environmental monitoring: A review of recent developments and technological advances in compact field deployable systems,” Sensors, vol. 19, no. 14, 2019, Art. no. 3071. doi: 10.3390/s19143071. [Google Scholar] [PubMed] [CrossRef]
13. C. B. Pande and K. N. Moharir, “Application of hyperspectral remote sensing role in precision farming and sustainable agriculture under climate change: A review,” in Climate Change Impacts on Natural Resources, Ecosystems and Agricultural Systems, Springer International Publishing, 2023, pp. 503–520. doi: 10.1007/978-3-031-19059-9_21. [Google Scholar] [CrossRef]
14. S. Wang, W. Han, X. Huang, X. Zhang, L. Wang, and J. Li, “Trustworthy remote sensing interpretation: Concepts, technologies, and applications,” ISPRS J. Photogramm. Remote Sens., vol. 209, no. 3, pp. 150–172, 2024. doi: 10.1016/j.isprsjprs.2024.02.003. [Google Scholar] [CrossRef]
15. S. S. Deshpande and A. B. Inamdar, Hyperspectral Remote Sensing in Urban Environments. UK: Routledge Taylor & Francis Group, 2023. [Google Scholar]
16. P. Sajadi et al., “Automated pixel purification for delineating pervious and impervious surfaces in a city using advanced hyperspectral imagery techniques,” IEEE Access, vol. 12, no. 1, pp. 82560–82583, 2024. doi: 10.1109/ACCESS.2024.3408805. [Google Scholar] [CrossRef]
17. A. Chauhan et al., “Chapter 10-earth observation applications for urban mapping and monitoring: Research prospects, opportunities and challenges,” in Earth Observation in Urban Monitoring, Earth Observation, A. Kumar, P. K. Srivastava, P. Saikia, R. K. Mall, Eds., Elsevier, 2024, pp. 197–229. [Google Scholar]
18. D. Hong et al., “SpectralGPT: Spectral remote sensing foundation model,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 46, no. 8, pp. 5227–5244, 2024. doi: 10.1109/TPAMI.2024.3362475. [Google Scholar] [PubMed] [CrossRef]
19. I. Ahmad, G. Farooque, Q. Liu, F. Hadi, and L. Xiao, “MSTSENet: Multiscale spectral-spatial transformer with squeeze and excitation network for hyperspectral image classification,” Eng. Appl. Artif. Intell., vol. 134, no. 3, 2024, Art. no. 108669. doi: 10.1016/j.engappai.2024.108669. [Google Scholar] [CrossRef]
20. M. Ahmad, A. M. Khan, M. Mazzara, S. Distefano, M. Ali and M. S. Sarfraz, “A fast and compact 3-D CNN for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 19, pp. 1–5, 2022. doi: 10.1109/LGRS.2020.3043710. [Google Scholar] [CrossRef]
21. D. Hong, L. Gao, J. Yao, B. Zhang, A. Plaza and J. Chanussot, “Graph convolutional networks for hyperspectral image classification,” IEEE Trans. Geosci. Remote Sens., vol. 59, no. 7, pp. 5966–5978, 2021. doi: 10.1109/TGRS.2020.3015157. [Google Scholar] [CrossRef]
22. A. Jamali, S. K. Roy, D. Hong, P. M. Atkinson, and P. Ghamisi, “Attention graph convolutional network for disjoint hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., 2024. doi: 10.1109/LGRS.2024.3356422. [Google Scholar] [CrossRef]
23. J. Yao, B. Zhang, C. Li, D. Hong, and J. Chanussot, “Extended vision transformer (ExViT) for land use and land cover classification: A multimodal deep learning framework,” IEEE Trans. Geosci. Remote Sens., vol. 61, pp. 1–15, 2023. doi: 10.1109/TGRS.2023.3284671. [Google Scholar] [CrossRef]
24. M. Ahmad, U. Ghous, M. Usama, and M. Mazzara, “Waveformer: Spectral-spatial wavelet transformer for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 21, pp. 1–5, 2024. doi: 10.1109/LGRS.2024.3441938. [Google Scholar] [CrossRef]
25. M. Ahmad and M. Mazzara, “SCSNet: Sharpened cosine similarity-based neural network for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 21, pp. 1–4, 2024. doi: 10.1109/LGRS.2024.3365611. [Google Scholar] [CrossRef]
26. T. Lu, Y. Fang, W. Fu, K. Ding, and X. Kang, “Dual-stream class-adaptive network for semi-supervised hyperspectral image classification,” IEEE Trans. Geosci. Remote Sens., vol. 62, pp. 1–11, 2024. doi: 10.1109/TGRS.2024.3357455. [Google Scholar] [CrossRef]
27. M. Ahmad, M. Usama, A. M. Khan, S. Distefano, H. A. Altuwaijri and M. Mazzara, “Spatial spectral transformer with conditional position encoding for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 21, 2024, Art. no. 5508205. doi: 10.1109/LGRS.2024.3431188. [Google Scholar] [CrossRef]
28. H. Tan et al., “Data pruning via moving-one-sample-out,” in Advances in Neural Information Processing Systems, A. Oh, T. Naumann, A. Globerson, K. Saenko, M. Hardt, S. Levine, Eds., Curran Associates, Inc., 2023, vol. 36. [Google Scholar]
29. M. Ahmad et al., “A disjoint samples-based 3D-CNN with active transfer learning for hyperspectral image classification,” IEEE Trans. Geosci. Remote Sens., vol. 60, pp. 1–16, 2022. doi: 10.1109/TGRS.2022.3209182. [Google Scholar] [CrossRef]
30. C. Geiß, P. Aravena Pelizar, H. Schrade, A. Brenning, and H. Taubenböck, “On the effect of spatially non-disjoint training and test samples on estimated model generalization capabilities in supervised classification with spatial features,” IEEE Geosci. Remote Sens. Lett., vol. 14, no. 11, pp. 2008–2012, 2017. doi: 10.1109/LGRS.2017.2747222. [Google Scholar] [CrossRef]
31. M. Ahmad et al., “Spatial prior fuzziness pool-based interactive classification of hyperspectral images,” Remote Sens., vol. 11, no. 9, 2019, Art. no. 1136. doi: 10.3390/rs11091136. [Google Scholar] [CrossRef]
32. P. Zhang, H. Yu, P. Li, and R. Wang, “TransHSI: A hybrid CNN-transformer method for disjoint sample-based hyperspectral image classification,” Remote Sens., vol. 15, no. 22, 2023. doi: 10.3390/rs15225331. [Google Scholar] [CrossRef]
33. D. Hong, C. Li, B. Zhang, N. Yokoya, J. A. Benediktsson and J. Chanussot, “Multimodal artificial intelligence foundation models: Unleashing the power of remote sensing big data in earth observation,” Innov. Geosci., vol. 2, no. 1, 2024, Art. no. 100055. doi: 10.59717/j.xinn-geo.2024.100055. [Google Scholar] [CrossRef]
34. J. Yao, D. Hong, H. Wang, H. Liu, and J. Chanussot, “UCSL: Toward unsupervised common subspace learning for cross-modal image classification,” IEEE Trans. Geosci. Remote Sens., vol. 61, pp. 1–12, 2023. doi: 10.1109/TGRS.2023.3282951. [Google Scholar] [CrossRef]
35. J. Yao, D. Hong, C. Li, and J. Chanussot, “SpectralMamba: Efficient mamba for hyperspectral image classification,” 2024, arXiv:2404.08489. [Google Scholar]
36. D. Hong et al., “Cross-city matters: A multimodal remote sensing benchmark dataset for cross-city semantic segmentation using high-resolution domain adaptation networks,” Remote Sens. Environ., vol. 299, 2023, Art. no. 113856. doi: 10.1016/j.rse.2023.113856. [Google Scholar] [CrossRef]
37. J. Yao et al., “Semi-active convolutional neural networks for hyperspectral image classification,” IEEE Trans. Geosci. Remote Sens., vol. 60, no. 2, pp. 1–15, 2022. doi: 10.1109/TGRS.2022.3230411. [Google Scholar] [CrossRef]
38. U. Ghous, M. S. Sarfraz, M. Ahmad, C. Li, and D. Hong, “(2+1)D extreme xception net for hyperspectral image classification,” IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., vol. 17, pp. 5159–5172, 2024. doi: 10.1109/JSTARS.2024.3362936. [Google Scholar] [CrossRef]
39. S. K. Adari and S. Alla, “Introduction to machine learning,” in Beginning Anomaly Detection Using Python-Based Deep Learning: Implement Anomaly Detection Applications with Keras and PyTorch. Berkeley, CA: Apress, 2024, pp. 105–134. [Google Scholar]
40. S. K. Roy, G. Krishna, S. R. Dubey, and B. B. Chaudhuri, “HybridSN: Exploring 3-D-2-D CNN feature hierarchy for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 17, no. 2, pp. 277–281, 2020. doi: 10.1109/LGRS.2019.2918719. [Google Scholar] [CrossRef]
41. Y. Wang, X. Yu, X. Wen, X. Li, H. Dong and S. Zang, “Learning a 3-D-CNN and convolution transformers for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 21, pp. 1–5, 2024. doi: 10.1109/LGRS.2024.3365615. [Google Scholar] [CrossRef]
42. L. Song, Z. Feng, S. Yang, X. Zhang, and L. Jiao, “Interactive spectral-spatial transformer for hyperspectral image classification,” IEEE Trans. Circuits Syst. Video Technol., 2024. doi: 10.1109/TCSVT.2024.3386578. [Google Scholar] [CrossRef]
43. X. Yang et al., “Synergistic 2D/3D convolutional neural network for hyperspectral image classification,” Remote Sens., vol. 12, no. 12, 2020, Art. no. 2033. doi: 10.3390/rs12122033. [Google Scholar] [CrossRef]
44. W. Liao, F. Wang, and H. Zhao, “Hyperspectral image classification using attention-only spatial-spectral network based on transformer,” IEEE Access, vol. 12, pp. 93677–93688, 2024. doi: 10.1109/ACCESS.2024.3424674. [Google Scholar] [CrossRef]
45. T. Arshad and J. Zhang, “A light-weighted spectral-spatial transformer model for hyperspectral image classification,” IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., vol. 17, pp. 12008–12019, 2024. doi: 10.1109/JSTARS.2024.3419070. [Google Scholar] [CrossRef]
46. R. Khan, T. Arshad, X. Ma, W. Chen, H. F. Zhu and Y. N. Wu, “Deep spectral spatial feature enhancement through transformer for hyperspectral image classification,” IEEE Geosci. Remote Sens. Lett., vol. 21, pp. 1–5, 2024. doi: 10.1109/LGRS.2024.3424986. [Google Scholar] [CrossRef]
47. H. Fırat, M. E. Asker, M. I. Bayındır, and D. Hanbay, “Hybrid 3D/2D complete inception module and convolutional neural network for hyperspectral remote sensing image classification,” Neural Process. Lett., vol. 55, no. 2, pp. 1087–1130, 2023. doi: 10.1007/s11063-022-10929-z. [Google Scholar] [CrossRef]
48. X. Zhang, “Improved three-dimensional inception networks for hyperspectral remote sensing image classification,” IEEE Access, vol. 11, pp. 32648–32658, 2023. doi: 10.1109/ACCESS.2023.3262992. [Google Scholar] [CrossRef]
49. Z. Xiong, Y. Yuan, and Q. Wang, “AI-NET: Attention inception neural networks for hyperspectral image classification,” in IGARSS 2018—2018 IEEE Int. Geosci. Remote Sens. Symp., IEEE, 2018. [Google Scholar]
50. X. Wu, D. Hong, and J. Chanussot, “Convolutional neural networks for multimodal remote sensing data classification,” IEEE Trans. Geosci. Remote Sens., vol. 60, pp. 1–10, 2022. doi: 10.1109/TGRS.2022.3228927. [Google Scholar] [CrossRef]
51. S. Ghaderizadeh, D. Abbasi-Moghadam, A. Sharifi, N. Zhao, and A. Tariq, “Hyperspectral image classification using a hybrid 3D-2D convolutional neural networks,” IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., vol. 14, pp. 7570–7588, 2021. doi: 10.1109/JSTARS.2021.3099118. [Google Scholar] [CrossRef]
52. X. Yang, Y. Ye, X. Li, R. Y. Lau, X. Zhang and X. Huang, “Hyperspectral image classification with deep learning models,” IEEE Trans. Geosci. Remote Sens., vol. 56, no. 9, pp. 5408–5423, 2018. doi: 10.1109/TGRS.2018.2815613. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools