
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Dynamic Networking Method of Vehicles in VANET
Department of Automation, School of Electrical Engineering, Guizhou University, Guiyang, 550000, China
* Corresponding Author: Qinmu Wu. Email:
(This article belongs to the Special Issue: Advanced Communication and Networking Technologies for Internet of Things and Internet of Vehicles)
Computers, Materials & Continua 2024, 81(1), 1301-1318. https://doi.org/10.32604/cmc.2024.054799
Received 07 June 2024; Accepted 05 September 2024; Issue published 15 October 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Vehicular Ad-hoc Networks (VANETs) make it easy to transfer information between vehicles, and this feature is utilized to enable collaborative decision-making between vehicles to enhance the safety, economy, and entertainment of vehicle operation. The high mobility of vehicles leads to a time-varying topology between vehicles, which makes inter-vehicle information transfer challenging in terms of delay control and ensuring the stability of collaborative decision-making among vehicles. The clustering algorithm is a method aimed at improving the efficiency of VANET communication. Currently, most of the research based on this method focuses on maintaining the stability of vehicle clustering, and few methods focus on the information interaction and collaborative decision-making of vehicles in the region. In this context, this paper proposes a networking method for intra-regional vehicle information interaction, through an efficient information transmission mechanism, vehicles can quickly obtain the required information and make more accurate decisions. Firstly, this networking method utilizes DBSCAN and the proposed vehicle scoring model to form clusters, ensuring the stability and adaptability of clusters; secondly, in the process of interacting with the information, the cosine similarity is utilized to check the similarity of the information to eliminate the highly similar information, effectively reducing redundant information; and lastly, in the case of a consensus reached by the cluster, the frequency of broadcasting of information between vehicles is reduced as a way to minimize the waste of communication resources. The proposed method is simulated based on Python and Sumo platforms, and several metrics such as cluster clustering situation, information volume, and state change rate are analyzed. The results show that the method maintains better cluster stability with a 60% and 92% reduction in information overhead compared to the FVC and HCAR algorithms, respectively.Keywords
Vehicular Ad-hoc Network (VANET) is an emerging network technology [1], Vehicular Ad-hoc Network consists of vehicular units which are randomly distributed on the road to facilitate communication throughout the vehicular networking system [2]. There are many types of communication in VANET, such as vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), and vehicle-to-roadside unit (V2R), which can be used by vehicles on the road to facilitate a more environmentally friendly, intelligent, and sustainable transportation system [3,4]. In the era of electric vehicle networking, the safety, economy, and entertainment of road traffic can be enhanced by using multiple electric vehicles to work together online using the characteristics of electric vehicles such as easy information interaction and easy collection of status information.
In VANET, vehicles act as mobile nodes and RSUs act as fixed nodes, and they communicate with each other directly or indirectly to form the communication network of VANET [5,6]. However, in VANET, vehicles are basically in a mobile state, and vehicles will frequently join or leave the group network, this phenomenon increases the information collision problem, reduces channel utilization decreases the packet delivery rate [7], and hinders collaborative decision-making in networked electric vehicles. To solve these problems, Intelligent Transportation Systems (ITS) have used various methods. Among them, clustering is a technique that clusters nodes [8–10], and after clustering the vehicles are easier to manage. To implement clustering in VANET, many clustering algorithms for Mobile Ad-hoc Networks (MANET) have been cited for VANET, but most of these algorithms have poor results [11]. In recent years, scholars have mostly focused on designing a clustering algorithm to maintain cluster stability. In earlier studies, VANET mainly deals with two types of messages—security/emergency distress messages and non-security messages (entertainment messages) [12,13]. Traditional clustering algorithms are almost always designed for these two types of messages, and some of their results cannot be directly applied to collaborative decision-making in EVs due to the difference in message attributes. Previous networking methods that transmit safety information or entertainment information are mostly based on the stability of the cluster as an important index at the beginning of the establishment of the cluster, such as mobility-based clustering [9] and node similarity-based clustering [14–17], whereas intra-area collaborative decision-making requires clustering to allow vehicles in the cluster to exchange information quickly at a specific time to realize the collaborative decision-making function.
The factors that affect collaborative decision-making include the effectiveness of the clustering algorithm used, whether the CH selection method is reasonable, and whether the communication mechanism between vehicle nodes will cause a waste of resources, which are the objectives of this paper. This paper proposes a networking method based on RSU selection and vehicle node weight, which aims to maintain cluster stability and reduce communication redundancy when vehicles interact. It is named DNOV (Dynamic Networking Method of Vehicles in VANET). DNOV addresses these challenges by:
1. A clustering method based on DBSCAN and a vehicle scoring model is proposed, where DBSCAN can achieve more accurate clustering results in complex road networks and traffic environments with certain densities; the distance parameter to the RSU, a transit station, is added to the vehicle scoring model, which is the key to be able to achieve collaborative decision-making for networked electric vehicles in the region; the vehicle scoring model uses three key vehicle parameters to determine the cluster head vehicle, which maintains decent stability as well as selecting a cluster head that facilitates information transfer.
2. Based on the above clustering method, an algorithm to reduce information redundancy in clusters is introduced, aiming to achieve lower communication overhead.
3. A simulation of traffic flow and information transfer is implemented, and the results verify the effectiveness of the proposed clustering approach to achieve collaborative decision-making of networked electric vehicles.
The rest of the paper is organized as follows. Section 2 summarizes previous research and related work, Section 3 describes the DNOV model, Section 4 presents the simulation environment and methodology, shows the simulation results and effectiveness evaluation, and Section 5 concludes the full paper.
Taking advantage of the fact that vehicle information is easily exchanged in a connected vehicle environment, collaborative decision-making in networked electric vehicles should be actively promoted to enhance the safety, economy, and entertainment of vehicle operations. This requires relatively optimal information interaction of vehicle-to-vehicle and vehicle roadside units. The mainstream approach to optimize information dissemination is vehicle clustering, so this section will focus on reviewing clustering algorithms for connected vehicles.
Literature [18] combined the improved K-Means algorithm with the continuous Hopfield network and the Maximum Stable Set problem to propose a clustering-based routing protocol, to solve the problem of taking the value of K in the traditional K-Means algorithm, and then a weight function is utilized to select the cluster heads. Also improving the K-Means algorithm, literature [19] utilized K-Means to divide the area into segments and then selected the clusters based on factors such as vehicle location and direction, based on this clustering method, an adapted routing protocol is proposed to enhance the information transmission within the group network. Literature [20] proposed a VANET lifetime maximization model based on enhanced meta-heuristic clustering and multi-hop routing techniques for the instability of the network when vehicles are clustered, which is optimized for both cluster formation and cluster head selection process. Zhang et al. [21] pointed out that most of the existing clustering algorithms only consider the mobility of the vehicles when considering the cluster head selection, and this mobility makes the nodes in the cluster’s connectivity decrease. To address this problem, the article proposed a passive multi-hop clustering algorithm with a priority-based neighbor following strategy in the cluster head selection phase, which makes the inter-cluster nodes highly reliable and stable. Lin et al. [22] proposed a distributed clustering algorithm based on joint deep reinforcement learning, in which the authors used an artificial intelligence chip to select connectable vehicles through a policy network and locally update the connection status between vehicles as a reinforcement learning experience. And upload the training parameters of their model to the base station to update the model, and the updated model can improve the clustering performance of the vehicles that will be joined. Ali et al. [23] considered clustering as a multi-objective combinatorial optimization problem, and naturally inspired meta-heuristic algorithms can be optimized for multi-objective problems. Based on the above understanding, they proposed a HHO (Harris Hawks based Optimization) algorithm for VANET clustering. The proposed framework mimics the cooperative foraging mechanism of hawks and comparing the proposed algorithm with the clustering algorithm based on Gray Wolf Optimization, Multi-objective Particle Swarm Optimization, and Integrated Learning Particle Swarm Optimization algorithms, the proposed algorithm outperforms the other algorithms concerning the multi-objective clustering problem. From the literature [11], it is seen that some researchers have started to improve the clustering management for vehicles using meta-heuristic algorithms, Salim et al. [24] proposed a nature-inspired meta-heuristic clustering algorithm based on the Sparrow Searching Algorithm (IOVSSA), the IOVSSA combines a migration metric along the distance of the clusters to construct the smallest clusters with stable CHs, through a simulation study, The proposed IOVSSA algorithm was found to outperform the current state-of-the-art algorithms in terms of the number of clusters and the average cluster lifetime. Shah et al. [25] proposed a clustering algorithm based on moth-flame optimization based on bio-inspired, which can be efficiently operated in high-speed migrating nodes of the VANET, and in comparison to ACO optimization algorithms the proposed algorithm produces better results, the maximum coverage and produces the least number of clusters. Al-Obaidi et al. [26] stated that the clustering algorithm for VANETs operates in a decentralized mode, which requires the incorporation of additional stages before deciding on the clustering decision and may produce sub-optimality due to the local nature of the decentralized approach. In addition, the challenging architecture of road environments may lead to less effective clustering. So the article utilizes a centralized clustering technique to build a Cauchy density model to solve the problem of VANET for 3D road environments. Kalaivani et al. [27] proposed a link and weight-based clustering method in conjunction with Distributed Dispatch Information Table (DDIT). It is based on the relative speeds of two vehicles going in the same direction by forming a cluster with multiple nodes in a VANET. The cluster head is selected based on the link survival rate of the vehicles, emergency information is provided to different vehicles in the cluster, and packet information stored in the DDIT table is used for fault prediction. Finally, an efficient medium access control protocol is used to provide prioritized messages, which avoids the problem of shortage of emergency message spectrum in the cluster. Through comparative analysis with existing methods, it is proved that the method has the advantages of smaller transmission delay and smaller routing control overhead. Cheng et al. [28] focused on more complex urban road conditions and proposed a dynamic clustering model based on connectivity prediction. First, the characteristics of vehicle nodes are defined and an RNN-based connectivity prediction method is introduced based on the relative characteristics between vehicle nodes, and the connectivity prediction results are output using this model. Finally, a dynamic clustering model is then established based on the connectivity prediction results between vehicle nodes and the density of vehicle nodes, and based on this, a routing method used to achieve stable communication between dynamic nodes is proposed. In the literature [29], the authors proposed a fuzzy logic-based vehicle weighting model based on the phenomenon of difficult data propagation in VANET and utilized RSUs as a manager of data propagation. Fuzzy C-Mean Clustering (FCMC) is used to deal with clustered vehicles competing to use a shared channel. In this model, RSUs receive prioritized data from cluster heads to prevent external interference during communication.
Based on the above analysis, it can be seen that some of the proposed clustering algorithms mainly focus on the selection of cluster heads to improve the stability of clusters, while some of the intelligent algorithms emphasize the use of intelligent optimization algorithms to generate the best clusters, and few algorithms focus their objectives on optimizing the information interaction of clusters. In this paper, in addition to including the distance to RSUs as a parameter when forming clusters, a method is introduced to avoid broadcast storms caused by vehicle information interactions, aiming to enhance the collaborative decision-making function in clusters.
This section outlines our networking approach’s clustering method and cluster head selection process. We chose the DBSCAN algorithm for its advantages, including effective identification and isolation of noise points, which enhances clustering quality. DBSCAN can detect clusters of arbitrary shapes in a single scan, a challenge for other algorithms, making it ideal for real-world applications. Unlike many clustering algorithms that necessitate the preemptive specification of the number of clusters, DBSCAN does not require this [30], offering flexibility in parameter settings that are conducive to the real-time processing of vehicles for collaborative decision-making. Moreover, it allows for the customization of the required radius and minimum number of points based on the specific scenario, such as adjusting the radius to align with the communication range of the RSUs. However, DBSCAN also has some limitations; different parameters lead to different clustering results, requiring parameter tuning for specific scenarios, and the algorithm is weak in recognizing clusters in low-density regions and may ignore some meaningful low-density clusters.
A. Assumptions
The modeling scheme proposed in this paper is shown in Fig. 1, where the RSUs in the network have the same communication capability as the vehicles in terms of communication power. This work considers dynamic traffic flow, and since in real scenarios, vehicles in opposite directions communicate with each other for a relatively short period, only vehicles in the lanes of the same direction of travel are modeled in this paper. For the model proposed in this paper, the following assumptions are made:
(1) All vehicles have LTE and 802.11 p interfaces;
(2) All vehicles have a Global Positioning System (GPS);
(3) All vehicles are traveling in the same direction.

Figure 1: Networking scheme
Based on the above assumptions, a dynamic clustering method based on DBSCAN is proposed to group a certain number of vehicles in the communication area into clusters, some new parameters are proposed for CH selection, this parameter is suitable for optimizing the interaction of vehicle information within the cluster, which will be presented in Section 3.2, and also in CH selection, this paper focuses on optimizing the repeatability of the information.
B. Vehicle Modeling
Definition 1: The vehicle characteristics at the time t are:
where
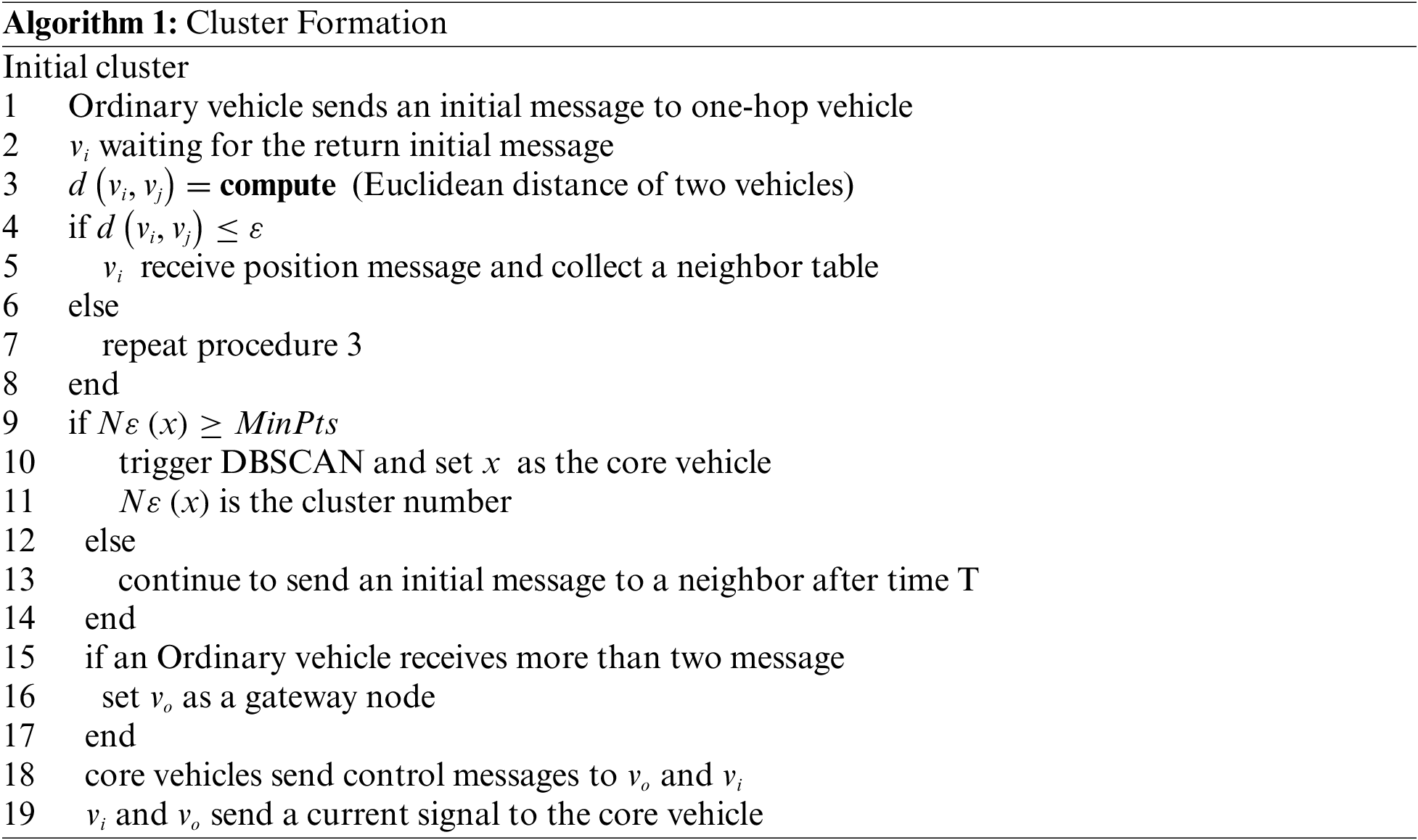
1) Dynamic clustering: clustering starts with each vehicle node set to an initialized state, which means that the vehicles do not belong to any cluster yet. Then, the vehicle starts sending and receiving information about single-hop vehicles within a specified range and forms a neighbor list on its OBU unit, the content of the information contains the vehicle states described in the previous section, and if there are enough vehicles around a vehicle node and the neighbor density exceeds a set threshold D, DBSCAN is promoted to form clusters. The information-sending interval for each vehicle node is T. Each vehicle is selected in the same traveling direction during cluster formation, and vehicles in the opposite direction are filtered out to prevent unnecessary clustering. The detailed process of cluster establishment is described in Algorithm 1.
In the DBSCAN algorithm, the parameter
Definition 2: A vehicle neighboring vehicle
The following three types of nodes are defined in DBSCAN:
1. Core point: number of nodes
2. Boundary point: the number of nodes
3. Noise points: neither core nor boundary points.
1) Core node: after finding the core node, the cluster formed by the neighbors of a core node is created, and if there is a node in the cluster whose neighbor density is also greater than the threshold, then the cluster is expanded into the cluster of
2) Gateway node: In the networking scheme of Fig. 1, the gray vehicle node belongs to two clusters at the same time, but it does not expand the two clusters into one cluster, and this node can receive and send messages from two clusters at the same time to realize the communication between the clusters, and therefore it is set as a gateway node;
3) Cluster head selection and substitution: when creating clusters, the core node is typically located at the center of the cluster and may not be the closest to the RSU. The collaborative decisions have a wide transmission range, and the number of involved vehicles is variable. Therefore, it is necessary to send the cooperation signal to the RSU quickly. To address this, the paper proposes a Vehicle Rating Model (VSM) to select cluster heads by considering the relative mobility of the vehicle and its distance to the RSU.
Before performing the calculation, the vehicle’s state characteristics are first normalized as shown in Eq. (2):
where is the nth feature of the vehicle at the moment t,
Definition 3: Relative mobility is calculated by combining three parameters: direction, speed difference, and acceleration difference between vehicles.
a) Direction: The possibility of clustering is only considered if the vehicles are traveling in the same direction.
b) Velocity difference: the difference in velocity between a vehicle
c) Acceleration difference: the difference in acceleration between a vehicle
d) Relative distance of RSUs: the distance between
where
The VSM model scores the vehicles according to Eq. (6):
where
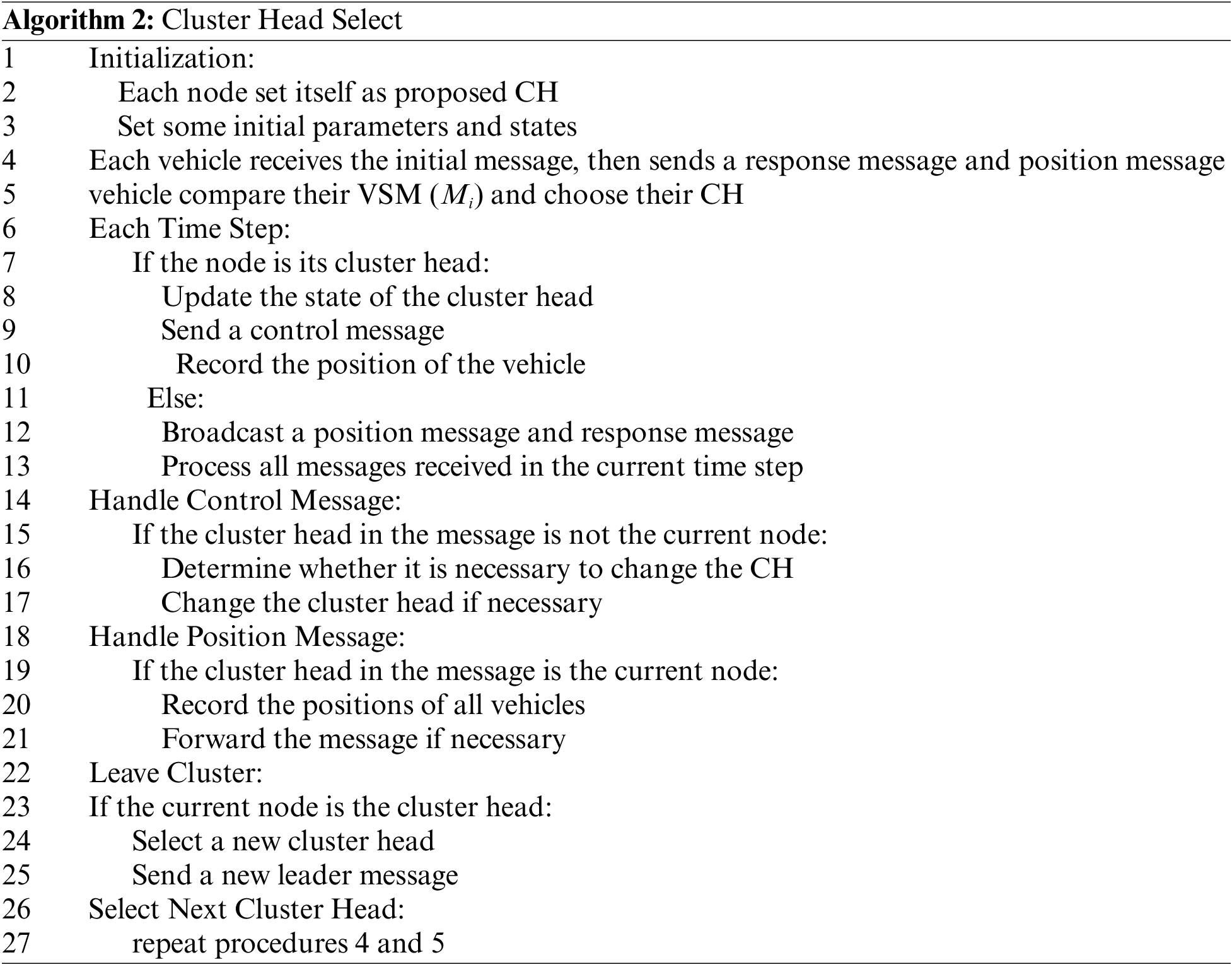
At the beginning of the clustering, each vehicle sends a CH initialization message to the rest of the vehicles, indicating that it wants to be a candidate for the CH. The most suitable CH is selected by comparing the information passed between the vehicles.
Through the above steps, it has been possible to form vehicle clusters, but in the case of relatively high traffic flow, the transmission of information may encounter blockage, which affects the effectiveness of vehicle collaborative decision-making. In this section, this paper optimizes the message transmission between vehicles to obtain higher transmission efficiency.
1) Message drop duplication: before sending a message to the RSU, each CH has to check the duplication between any two messages, so as not to transmit duplicated messages, resulting in a waste of resources. As soon as a message is received, the CH checks the similarity between the message and the message stored in its own OBU, if the similarity is high, it can be assumed that the two messages are duplicated and therefore it will not upload this message to the RSU. Cosine similarity is more suitable for high-dimensional data than Euclidean distance, and Jaccard similarity is more suitable for aggregate data, determining the similarity of cluster, not for text detection. It is widely used in Vehicular Networking Neighborhoods to detect the similarity of strings [1,31], in Eq. (7), it is shown how to calculate the similarity between two vectors.
where
The vehicle receives the message, first determines the message type based on the first character, and performs the similarity test based on the corresponding message form. The absolute value of the cosine similarity is between 0 and 1, 1 means the same, and 0 means not the same at all, so this paper defines a threshold G for the cosine similarity, according to which to decide whether the message is uploaded to the RSU or not, and sets the threshold to 0.9, any two messages with cosine similarity greater than 0.9 will be considered as highly similar, and do not have to be repeated to send. In addition, the control message and the initialization message contain time and cluster header ID, which are key information, and the difference between these two messages is very large, and they are not involved in message weight reduction. In this paper, only response messages and location messages are weighted down.
2) Reducing broadcast messages in the cluster: during the cluster’s initialization phase, each vehicle sends messages frequently to quickly agree on selecting a specific vehicle as the Cluster Head. Once the consensus is reached, it’s unnecessary to keep broadcasting that a particular vehicle is the CH at a high frequency. A mechanism is put in place so that if the Cluster Head’s OBU does not receive any messages from other vehicles indicating a different CH, the information is transmitted at a lower frequency.
The experimental setup is first described, then the parameter settings are presented, and finally, the performance of the proposed grouping method is evaluated in terms of clustering quality and message overhead. The discussion of the results is carried out in three stages: the impact on the designed DNOV results under different clustering metrics, the broadcast performance of the improved algorithm, and the message overhead comparison with different algorithms.
In this paper, we use sumo and python co-simulation to build a model to evaluate the clustering method. The information interaction function of a networked electric vehicle goes through RSUs to distribute information, so in sumo, the simulation scenario shown in Fig. 2 is built according to the ideal simulation scenario shown in Fig. 1.

Figure 2: Simulation scenario
Each road has six lanes in both directions. The generation of vehicles is related to random numbers, so the number of vehicles cannot be determined as a constant value. The detailed simulation parameters are shown in Table 2.

In the DBSCAN algorithm, vehicles are classified into three types: cluster head (CH), cluster member (CM), and noise point (NS), the fewer noise points, the better the clustering effect. Jaccard similarity is used to calculate the similarity between nodes to determine if vehicles belong to the same cluster, Euclidean distance measures the linear distance between nodes to determine node density. Fig. 3 illustrates the application of Jaccard similarity metrics and Euclidean distance metrics for clustering in the DBSCAN algorithm, with the

Figure 3: DBSCAN noise ratio using different metrics

Figure 4: DBSCAN uses comprehensive scores of different metrics
4.3 Comparison of Broadcast Performance
The effectiveness of the proposed method can be observed by the changing vehicle mobility over time. When vehicle mobility is low, it is desired that the clusters achieve stable and efficient connectivity, which facilitates collaborative decision signaling between the cluster heads and RSUs; when vehicle mobility is high, vehicles will frequently join or exit the clusters, and the cluster heads and RSUs need to communicate more frequently, resulting in high message overhead. Fig. 5 shows the number of clusters generated by DNOV at different densities and the average number of vehicles in each cluster. In DNOV, the algorithm generates 7 clusters and 14 clusters with an average of 8.6 and 28.1 vehicles in each cluster for low traffic (100 veh/500 s) and high traffic (500 veh/500 s), respectively. Combining Figs. 5 and 6, it can be seen that both the number of clusters, the number of cars in the clusters, and the amount of information are increasing as the traffic volume becomes larger, which can reduce the communication efficiency. In the simulated vehicular scenario, information is constantly sent between vehicles to ensure real-time updates of cluster states, but in a relatively short period, the positions, states, and cluster states of the vehicles may not change much, so the information sent is not particularly utilized, but instead causes bandwidth constraints.

Figure 5: Number of clusters generated by DNOV at different densities and the average number of vehicles in each cluster

Figure 6: Number of information before and after optimization
In this paper, the cosine similarity detection algorithm and the reduction of the broadcasting frequency are used to alleviate bandwidth usage. As shown in Fig. 6, after the introduction of the message delivery optimization method, the amount of information generated achieves a reduction of about 19% compared to that before the optimization; in particular, in the low traffic flow case (50–100 veh/500 s), about 37% of the information is reduced, and the algorithm reduces the amount of information by about 13% in the medium-high traffic flow case, probably because in the low traffic flow, the change of the position between the vehicles is not very frequent, the spacing itself is relatively large, and less conflict information is generated after forming clusters. In the case of medium and high traffic flow, the density of vehicles is large, the change of position is more frequent, and more information about cluster head selection is generated, and more information needs to be transmitted to ensure the state of clusters, so the effect of the information transmission optimization is relatively not obvious. To achieve collaborative decision-making, it is necessary to pass the collaborative decision-making signal in the shortest possible time, all the vehicles belong to the cluster and the vehicles in the cluster agree with a certain vehicle as the core vehicle of this process is defined as the execution time, before and after the optimization of the execution time is shown in Fig. 7. It can be seen that when the traffic volume becomes larger, more information needs to be transmitted and the execution time of the system increases reducing the communication efficiency of the cluster. The optimized algorithm reduces the execution time by about 37% stably in both low-traffic and medium-high-traffic sections.
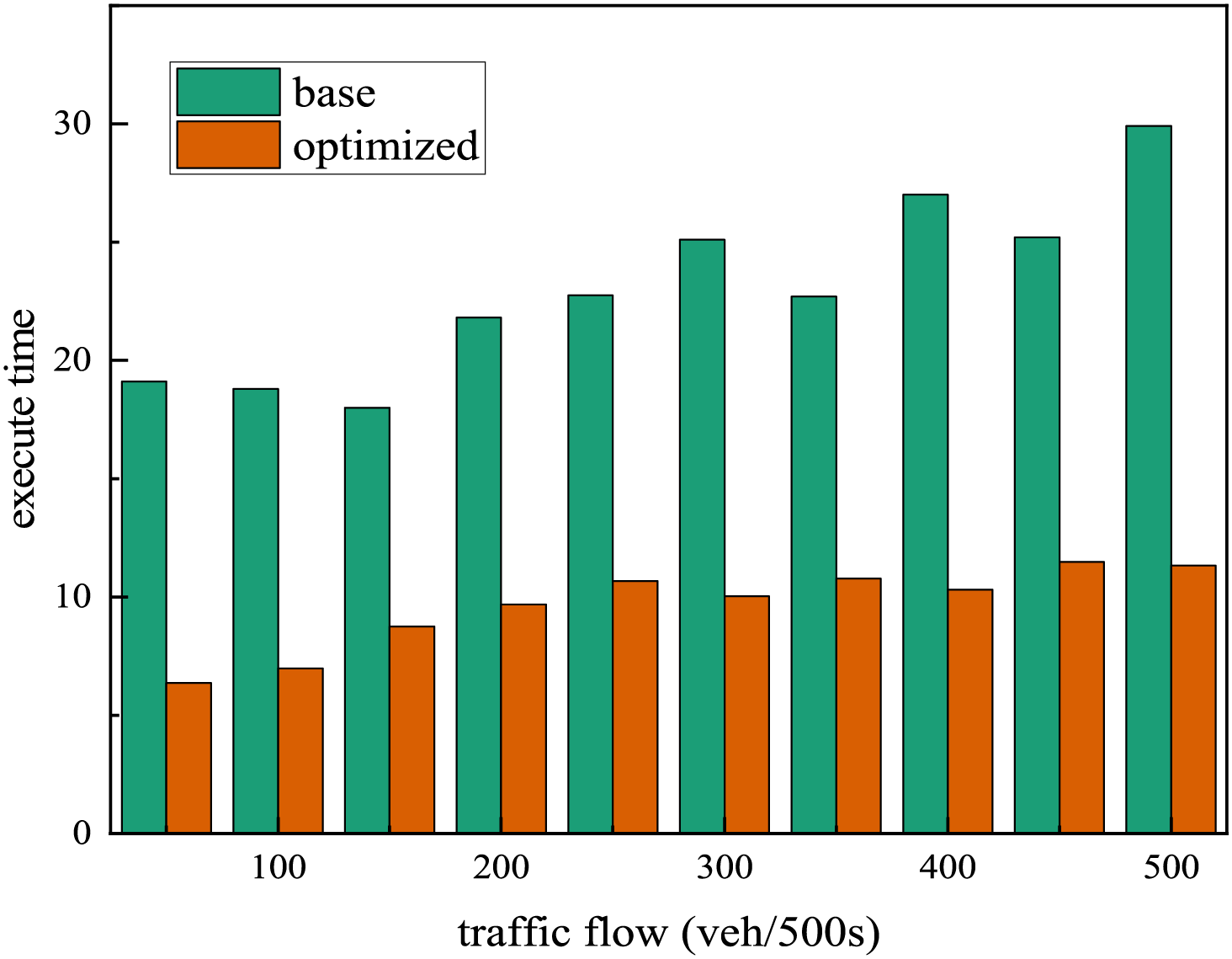
Figure 7: Execute time before and after optimization
In this paper, message overhead refers to the total amount of information sent by all vehicles to reach a collaborative decision during the simulation time, including initialization information, feedback information, position information, and control information. Fewer messages mean that the vehicle consume less bandwidth resources in collaborative decision-making. The FVC algorithm [32] relies on periodically broadcasting basic safety information in the Dedicated Short Range Communication (DSRC) standard to exchange vehicle statuses, requests, etc., attaching additional information to periodic beacons as a way of reducing communication overhead; the HCAR algorithm [33] utilizes RSUs for clustering, avoiding the need for vehicles to pass on information to reduce the communication load during the cluster formation phase, but in the cluster maintenance as well as in subsequent stages, there is no method to reduce the communication load further. These two methods are chosen because they have many similarities with the algorithms proposed in this paper, in the cluster head selection phase, both are combined with many parameters of the vehicle to select, and both make some optimization in the information transfer of VANET.
The DNOV proposed in this paper is different from FVC and HCAR in that it uses the vehicle speed difference, acceleration deviation, and relative distance difference from the RSU to select the CH and utilizes a message weight reduction and a reduced broadcast frequency scheme to reduce the amount of extra computation in terms of message delivery. Fig. 8 shows that the FVC and HCAR algorithms require slightly more messages to be sent than the DNOV algorithm. The proposed method has only a small increment in the amount of data when the intermediate traffic (470–810 veh/500 s) varies, which should be in high-speed scenarios, where the calculations of the vehicle scoring model change very little due to the relatively high speed of the vehicles, and when the clusters have reached a consensus on the cluster heads, the algorithms reduce the frequency of messages sent by the vehicles, and the cosine similarity is utilized to further reduce the redundancy of the messages. DNOV shows a reduction in the average message size compared to both HCAR and FVC.

Figure 8: Message volume under different traffic
Another performance metric that can quantify the proposed scheme is the average vehicle state change. It was mentioned above that DBSCAN can categorize vehicle nodes into three types (Cluster Head, Cluster Member, and Noise Point), the FVC scheme enables the vehicle to switch within three states (Uncluster, CM, and CH), and HCAR uses the auxiliary Cluster Head as the fourth state of the vehicle. In general, a comparatively small number of state changes indicates that the cluster is structurally stable, but the requirements for the stability of clusters are different in different application scenarios. stability requirements are not the same.
HCAR changes the state of the vehicle only after the CH or SCH leaves the cluster after the cluster is formed. The FVC scheme calculates the LET value (the value of the combined velocity, coordinate, and moving direction) in real time, and selects the most recent cluster head of the vehicle with the largest LET. DNOV combines the direction, velocity, acceleration, and relative distance to RSUs for the cluster head selection and iteration, and the DNOV is the most recent cluster head in the simulation scenario. However, in the simulation scenario, the relative distance to the RSU has a higher weight, and the communication with the RSU is emphasized more than the FVC, so the cluster head will not be changed much. Fig. 9 shows the state changes of the three scenarios during the simulation, with HCAR being the lowest, and both FVC and DNOV having a higher number of changes.
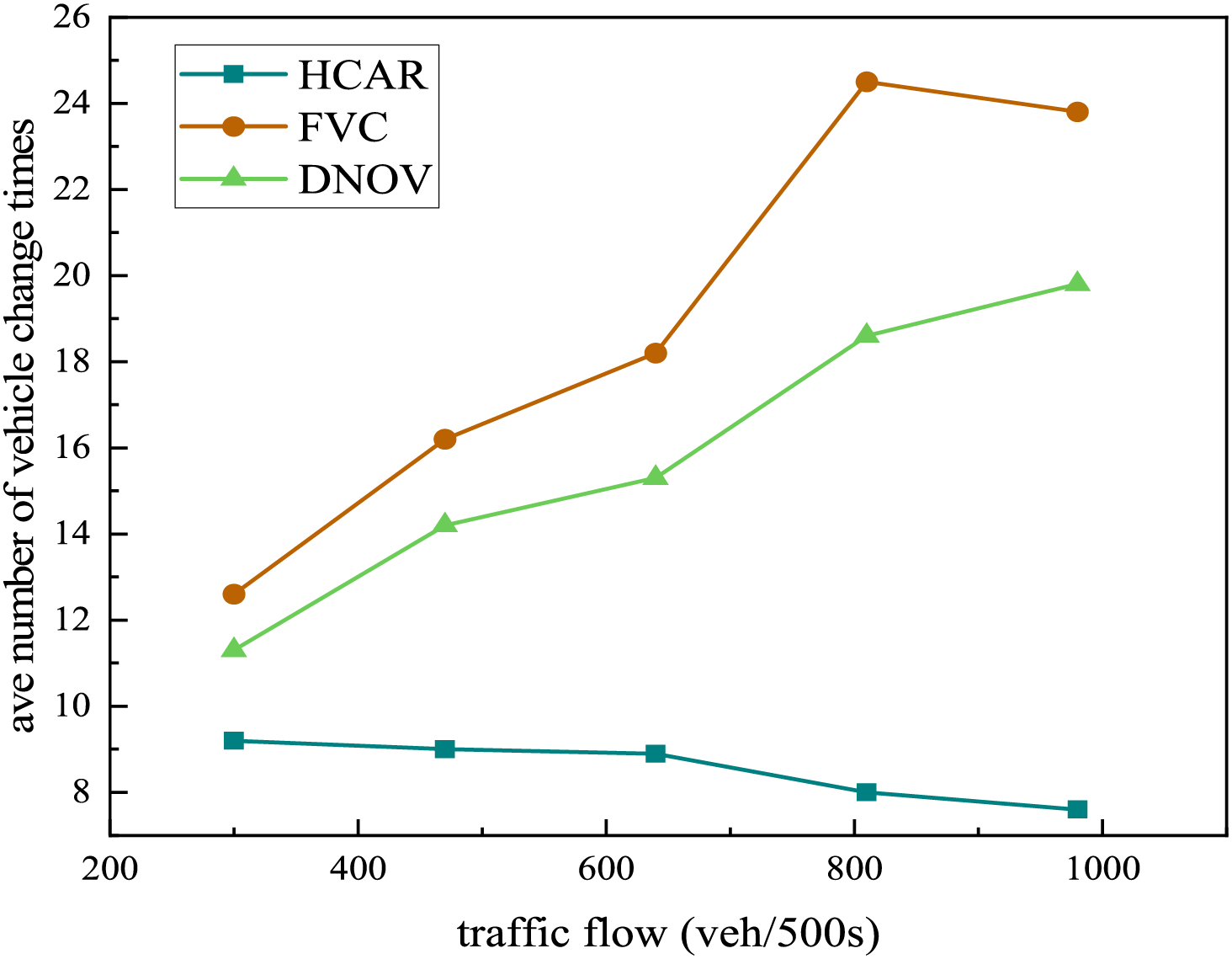
Figure 9: Average number of vehicle state changes under different flows
First, to facilitate information transmission and cooperative decision-making among networked electric vehicles, this paper proposes a networking method that combines DBSCAN and vehicle scoring models. In a highly mobile environment, the positions and states of vehicles are constantly changing. Traditional static clustering algorithms typically rely on fixed position and state data, causing them to perform poorly in dynamic and rapidly changing traffic environments. The DNOV method can flexibly adjust the structure and members of the cluster based on real-time vehicle information to effectively handle the dynamic entry and exit of vehicles, as well as to improve the efficiency of collaborative decision making. DONV algorithm uses the DBSCAN density clustering algorithm and vehicle scoring model to form dynamic vehicle clustering and selects the most suitable vehicles as cluster heads. The vehicle scoring model includes distance parameters to RSU, and the distance between vehicle and RSU directly affects the information transmission delay and signal strength. Therefore, when selecting cluster heads, we give priority to vehicles that are closer to RSU to facilitate cluster heads and RSU to send and receive cooperative signals or data, and improve the overall traffic efficiency of the system. Immediately after that, in the case of cluster formation and finding a cluster head, an information transfer optimization method is introduced to reduce further the resource consumption and the execution time of the whole algorithm caused during cooperative decision-making. Finally, a systematic evaluation is performed in terms of clustering performance and information interaction performance. Compared with the FVC and HCAR algorithms, DNOV reduces the amount of all information generated during the whole algorithm execution process, because during the simulation process, DNOV performs a similarity test, filters out some highly similar information, and reduces the frequency of broadcasting the information after the cluster is formed. All the cluster member vehicles have reached a consensus that a certain vehicle is the cluster head vehicle. In the average vehicle state change rate index, DNOV does not perform well, compared to the HCAR scheme, it only changes the state of the vehicle when the cluster head or the auxiliary cluster head leaves the cluster, compared to FVC, because the parameter RSU distance has a high weight in the vehicle scoring system in this paper, and due to the acceleration setting, after a node is selected as the cluster head, its period score will be high, so the state change rate is low, while the FVC scheme considers the combined speed, direction, and other parameters and calculates them in real-time, so the change is high. Moreover, in this work, the real network simulation of the networking method (such as OMNET++) is still lacking to test the delay and other performance of the networking method to determine the actual feasibility. In future work, we will simulate the networking method in OMNET++ to complete the feasibility assessment of the method in the network environment.
This paper focuses on a networking approach suitable for use in electric vehicles for collaborative decision-making in the context of grid connectivity, based on which many downstream applications can also be developed for electric vehicles. As the electric vehicles of the same model produced in the same batch, whose electric drive systems can be considered highly similar, the advantage of easy collection of drive system state data after the network connectivity of electric vehicles can be utilized to achieve a collaborative multi-vehicle online search for optimized currents to achieve efficient control of the electric drive system. In future research, more network simulation tools are planned to verify the network performance of DNOV as well as to test the multi-vehicle online search for optimized currents.
Acknowledgement: The authors would like to acknowledge mentors.
Funding Statement: This work was supported in part by the National Natural Science Foundation of China (NSFC) under Grant No. 52267003.
Author Contributions: The authors confirm contributions to this paper as follows: Qingkun Chen and Qinmu Wu are responsible for the conception and design of the study; The manuscript was written by Qingkun Chen. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data is available on request from the authors.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. B. Bhabani and J. Mahapatro, “CluRMA: A cluster-based RSU-enabled message aggregation scheme for vehicular ad hoc networks,” Veh. Commun., vol. 39, 2023, Art. no. 100564. doi: 10.1016/j.vehcom.2022.100564. [Google Scholar] [CrossRef]
2. P. Upadhyay et al., “An improved deep reinforcement learning routing technique for collision-free VANET,” Sci. Rep., vol. 13, no. 1, 2023, Art. no. 21796. doi: 10.48550/arXiv.2209.08075. [Google Scholar] [CrossRef]
3. B. Liu et al., “A region-based collaborative management scheme for dynamic clustering in green VANET,” IEEE Trans. Green Commun. Netw., vol. 6, no. 3, pp. 1276–1287, 2022. doi: 10.48550/arXiv.2110.02565. [Google Scholar] [CrossRef]
4. F. Lyu et al., “Characterizing urban vehicle-to-vehicle communications for reliable safety applications,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 6, pp. 2586–2602, 2020. doi: 10.1109/TITS.2019.2920813. [Google Scholar] [CrossRef]
5. A. M. C. Blessy and B. S., “Maximizing VANET performance in cluster head selection using Intelligent Fuzzy Bald Eagle optimization,” Veh. Commun., vol. 45, 2023, Art. no. 100660. doi: 10.1016/j.vehcom.2023.100660. [Google Scholar] [CrossRef]
6. G. Liu, N. Qi, J. Chen, C. Dong, and Z. Q. Huang, “Enhancing clustering stability in VANET: A spectra clustering based approach,” China Commun., vol. 17, no. 4, pp. 140–151, 2020. doi: 10.23919/JCC.2020.04.013. [Google Scholar] [CrossRef]
7. S. Abduljabbar Rashid, L. Audah, M. Maad Hamdi, and Sameer Alan, “An overview on quality of service and data dissemination in VANETs,” in 2020 Int. Congr. Hum.-Interact., Optim. Robot. Appl. (HORA), 2020, pp. 1–5. doi: 10.1109/HORA49412.2020.9152828. [Google Scholar] [CrossRef]
8. M. Banikhalaf and M. A. Khder, “A simple and robust clustering scheme for large-scale and dynamic VANETs,” IEEE Access, vol. 8, pp. 103565–103575, 2020. doi: 10.1109/ACCESS.2020.2999368. [Google Scholar] [CrossRef]
9. S. Vergis, G. Tsoumanis, and K. Oikonomou, “A proposed multi-head clustering algorithm for VANET environments,” in 2021 6th South-East Eur. Design Autom., Comput. Eng., Comput. Netw. Soc. Media Conf. (SEEDA-CECNSM), 2021, pp. 1–8. [Google Scholar]
10. C. J. Joshua, P. Jayachandran, A. Q. Md, A. K. Sivaraman, and K. F. Tee, “Clustering, routing, scheduling, and challenges in bio-inspired parameter tuning of vehicular Ad Hoc networks for environmental sustainability,” Sustainability, vol. 15, no. 6, 2023, Art. no. 4767. doi: 10.3390/su15064767. [Google Scholar] [CrossRef]
11. C. Cooper, D. Franklin, M. Ros, F. Safaei, and M. Abolhasan, “A comparative survey of VANET clustering techniques,” IEEE Commun. Surv. Tutorials, vol. 19, no. 1, pp. 657–681, 2017. doi: 10.1109/comst.2016.2611524. [Google Scholar] [CrossRef]
12. O. S. Al-Heety et al., “A comprehensive survey: Benefits, services, recent works, challenges, security, and use cases for SDN-VANET,” IEEE Access, vol. 8, pp. 91028–91047, 2020. doi: 10.1109/access.2020.2992580. [Google Scholar] [CrossRef]
13. S. Sharma and A. Kaul, “VANETs cloud: Architecture, applications, challenges, and issues,” Arch. Comput. Methods Eng., vol. 28, no. 4, pp. 2081–2102, 2021. doi: 10.1007/s11831-020-09447-9. [Google Scholar] [CrossRef]
14. H. Fatemidokht and M. Kuchaki Rafsanjani, “QMM-VANET: An efficient clustering algorithm based on QoS and monitoring of malicious vehicles in vehicular ad hoc networks,” J. Syst. Softw., vol. 165, 2020, Art. no. 110561. doi: 10.1016/j.jss.2020.110561. [Google Scholar] [CrossRef]
15. H. N. Abdulrazzak, G. C. Hock, N. A. Mohamed Radzi, and N. M. L. Tan, “A new unsupervised validation index model suitable for energy-efficient clustering techniques in VANET,” IEEE Access, vol. 11, pp. 67540–67555, 2023. doi: 10.1109/access.2023.3281302. [Google Scholar] [CrossRef]
16. K. Kandali and H. Bennis, “A Routing scheme using an adaptive K-harmonic means clustering for VANETs,” in 2020 Int. Conf. Intell. Syst. Comput. Vis. (ISCV), 2020, pp. 1–5. doi: 10.1109/iscv49265.2020.9204257. [Google Scholar] [CrossRef]
17. M. Mukhtaruzzaman and M. Atiquzzaman, “Stable dynamic predictive clustering (SDPC) protocol for vehicular ad hoc network,” Sep. 16, 2022. doi: 10.48550/arXiv.2209.08075. [Google Scholar] [CrossRef]
18. K. Kandali, L. Bennis, and H. Bennis, “A new hybrid routing protocol using a modified K-Means clustering algorithm and continuous hopfield network for VANET,” IEEE Access, vol. 9, pp. 47169–47183, 2021. doi: 10.1109/access.2021.3068074. [Google Scholar] [CrossRef]
19. M. Sindhwani, C. Singh, and R. Singh, “Implementation of K-Means algorithm and dynamic routing protocol in VANET,” Comput. Syst. Sci. Eng., vol. 40, no. 2, pp. 455–467, 2021. doi: 10.32604/csse.2022.018498. [Google Scholar] [CrossRef]
20. P. Muthukrishnan and P. M. Kannan, “Metaheuristics-based clustering with routing technique for lifetime maximization in vehicular networks,” Comput. Mater. Contin., vol. 74, no. 1, pp. 1107–1122, 2023. doi: 10.32604/cmc.2023.031962. [Google Scholar] [CrossRef]
21. D. Zhang et al., “New multi-hop clustering algorithm for vehicular ad hoc networks,” IEEE Trans. Intell. Transp. Syst., vol. 20, no. 4, pp. 1517–1530, 2019. doi: 10.1109/tits.2018.2853165. [Google Scholar] [CrossRef]
22. C. H. Lin, K. T. Lin, and P. C. Wang, “Stable clustering in VANET using federated deep reinforcement learning,” in 2023 IEEE Int. Conf. Omni-Layer Intell. Syst. (COINS), 2023, pp. 1–6. doi: 10.1109/coins57856.2023.10189251. [Google Scholar] [CrossRef]
23. A. Ali, F. Aadil, M. F. Khan, M. Maqsood, and S. Lim, “Harris hawks optimization-based clustering algorithm for vehicular ad-hoc networks,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 6, pp. 5822–5841, 2023. doi: 10.1109/tits.2023.3257484. [Google Scholar] [CrossRef]
24. A. Salim, A. M. Khedr, and W. Osamy, “IoVSSA: Efficient mobility-aware clustering algorithm in internet of vehicles using sparrow search algorithm,” IEEE Sens. J., vol. 23, no. 4, pp. 4239–4255, 2023. doi: 10.1109/jsen.2022.3233903. [Google Scholar] [CrossRef]
25. Y. A. Shah et al., “An evolutionary algorithm-based vehicular clustering technique for VANETs,” IEEE Access, vol. 10, pp. 14368–14385, 2022. doi: 10.1109/access.2022.3145905. [Google Scholar] [CrossRef]
26. A. S. Al-Obaidi et al., “Cauchy density-based algorithm for VANETs clustering in 3D road environments,” IEEE Access, vol. 10, pp. 76376–76385, 2022. doi: 10.1109/access.2022.3187698. [Google Scholar] [CrossRef]
27. D. Kalaivani and P. C. Mouli, “Link survivability rate-based clustering for QoS maximisation in VANET,” Int. J. Grid Util. Comput., vol. 11, no. 4, pp. 457–467, 2020. doi: 10.1504/ijguc.2020.10029847. [Google Scholar] [CrossRef]
28. J. Cheng et al., “A connectivity-prediction-based dynamic clustering model for VANET in an urban scene,” IEEE Internet Things J., vol. 7, no. 9, pp. 8410–8418, 2020. doi: 10.1109/jiot.2020.2990935. [Google Scholar] [CrossRef]
29. F. Abbasi, M. Zarei, and A. M. Rahmani, “FWDP: A fuzzy logic-based vehicle weighting model for data prioritization in vehicular ad hoc networks,” Veh. Commun., vol. 33, 2022, Art. no. 100413. doi: 10.1016/j.vehcom.2021.100413. [Google Scholar] [CrossRef]
30. H. Alabbas and Á. Huszák, “A new clustering algorithm for live road surveillance on highways based on DBSCAN and fuzzy logic,” Int. J. Adv. Comput. Sci. Appl., vol. 11, no. 8, pp. 580–587, 2020. doi: 10.14569/ijacsa.2020.0110872. [Google Scholar] [CrossRef]
31. A. Nahar, H. Sikarwar, and D. Das, “CSBR: A cosine similarity based selective broadcast routing protocol for vehicular ad-hoc networks,” in 2020 IFIP Netw. Conf. (Networking), 2020, pp. 404–412. [Google Scholar]
32. F. Samann and S. Askar, “Flag-based vehicular clustering scheme for vehicular ad-hoc networks,” Comput. Mater. Continua, vol. 77, no. 3, pp. 2715–2734, 2023. doi: 10.32604/cmc.2023.043580. [Google Scholar] [CrossRef]
33. O. Senouci, S. Harous, and Z. Aliouat, “A new heuristic clustering algorithm based on RSU for internet of vehicles,” Arab. J. Sci. Eng., vol. 44, no. 11, pp. 9735–9753, 2019. doi: 10.1007/s13369-019-03854-2. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools