
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Dynamical Artificial Bee Colony for Energy-Efficient Unrelated Parallel Machine Scheduling with Additional Resources and Maintenance
1 School of Science, Hong Kong University of Science and Technology, Hong Kong, 999077, China
2 School of Automation, Wuhan University of Technology, Wuhan, 430070, China
* Corresponding Author: Deming Lei. Email:
(This article belongs to the Special Issue: Metaheuristic-Driven Optimization Algorithms: Methods and Applications)
Computers, Materials & Continua 2024, 81(1), 843-866. https://doi.org/10.32604/cmc.2024.054473
Received 29 May 2024; Accepted 23 August 2024; Issue published 15 October 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Unrelated parallel machine scheduling problem (UPMSP) is a typical scheduling one and UPMSP with various real-life constraints such as additional resources has been widely studied; however, UPMSP with additional resources, maintenance, and energy-related objectives is seldom investigated. The Artificial Bee Colony (ABC) algorithm has been successfully applied to various production scheduling problems and demonstrates potential search advantages in solving UPMSP with additional resources, among other factors. In this study, an energy-efficient UPMSP with additional resources and maintenance is considered. A dynamical artificial bee colony (DABC) algorithm is presented to minimize makespan and total energy consumption simultaneously. Three heuristics are applied to produce the initial population. Employed bee swarm and onlooker bee swarm are constructed. Computing resources are shifted from the dominated solutions to non-dominated solutions in each swarm when the given condition is met. Dynamical employed bee phase is implemented by computing resource shifting and solution migration. Computing resource shifting and feedback are used to construct dynamical onlooker bee phase. Computational experiments are conducted on 300 instances from the literature and three comparative algorithms and ABC are compared after parameter settings of all algorithms are given. The computational results demonstrate that the new strategies of DABC are effective and that DABC has promising advantages in solving the considered UPMSP.Keywords
Scheduling problems and algorithms have been extensively utilized in manufacturing and service industries to enhance production efficiency. As a typical scheduling problem, parallel machine scheduling problem (PMSP) extensively exists in many processes of manufacturing and service including production lines, hospital management systems, computer systems and shipping docks [1,2]. In unrelated parallel machine scheduling (UPMSP), the processing time of a job depends on its assigned machine. UPMSP with various conditions and constraints such as additional resources, maintenance and energy have been well studied and a number of results were obtained in the past decade [3–5].
There are many works on unrelated parallel machine scheduling problems with additional resources (UPMSPR). Ventura et al. [6] proved that the problem with one single type of additional resources is equivalent to the asymmetric assignment problem. Zheng et al. [7] reported a two-stage adaptive fruit fly optimization algorithm (FOA) with a heuristic and knowledge-guided search. Fanjul-Peyro et al. [8] presented two integer linear programming models and three matheuristics. Fleszar et al. [9] gave an efficient mixed-integer linear programming (MILP) model for a lower bound. Zheng et al. [10] proposed a collaborative multi-objective FOA to minimize carbon emissions. Villa et al. [11] developed several heuristics based on resource constraints and assignment rules. Afzalirad et al. [12] presented an integer mathematical programming model and two genetic algorithms for the problem with eligibility restrictions. Vallada et al. [13] applied an enriched scatter search and an enriched iterated greedy with a best-known heuristic and a repair mechanism.
UPMSPR with at least two real-life constraints is also studied, which are non-zero arbitrary release dates and sequence-dependent setup times (SDST) [14], processing resources, setup resources and shared resources [15], and additional resources in processing and setup [16]. Pinar et al. [17] proposed three heuristics and greedy randomized adaptive search procedures for UPMSP with setup times, and additional limited resources in setup.
Preventive maintenance (PM) is often applied to prevent potential failures and serious accidents in parallel machines and UPMSP with PM is frequently addressed. Some real-life constraints such as aging effects [18], multi-resources PM planning [19], deteriorating [20] and SDST [21] are included into UPMSP with PM. Various meta-heuristics including genetic algorithm [20], novel imperialist competitive algorithm (NICA) with an estimation of distribution algorithm [22], a differentiated shuffled frog-leaping algorithm [23], iterated algorithm [24], artificial bee colony (ABC [25]) and adaptive ABC [26].
The increasing environmental and energy pressures result in the increasing attention to energy saving or energy efficiency in manufacturing industries. In recent years, UPMSP with energy has received some attention. Che et al. [27] presented an improved continuous-time MILP model and a two-stage heuristic for UPMSP under time-of-use (TOU) electricity price. Cota et al. [28] proposed a MILP model and a novel math-heuristic algorithm for UPMSP with makespan and total consumption of electricity. Abikarram et al. [29] developed a mathematical optimization model and some analyses for UPMSP with energy cost. Zhang et al. [30] provided a new heuristic evolutionary algorithm to solve UPMSP with tool changes, makespan and total energy consumption. Wang et al. [31] applied a modified artificial immune algorithm to deal with UPMSP with energy, auxiliary resource shared among machines. For UPMSP with TOU electricity tariffs, Saberi-Aliabad et al. [32] presented a MILP model and a number of dominance rules and valid inequalities and Pei et al. [33] proposed an approximate algorithm after the problem is transformed into single machine problems with TOU electricity price. Zhang et al. [34] developed a combinatorial evolutionary algorithm (CEA) for UPMSP with setup times, limited worker resources and learning effect.
As stated above, UPMSPR, UPMSP with PM and UPMSP with energy have attracted attention and have been addressed using metaheuristics like ABC, NICA and FOA etc.; moreover, UPMSP with at least two real-life constraints is often studied [14–17,22–24]; however, UPMSP with additional resources, maintenance and energy is hardly investigated. In many unrelated parallel machine production processes, additional resources and maintenance often exist simultaneously and energy efficiency is important for production with the increasing pressures of environmental protection and energy price. The consideration of these things can result in a high application value of the obtained schedule, so it is essential to solve energy-efficient UPMSP with additional resources and PM.
It also can be found that ABC is an effective method to solve UPMSPR and UPMSP with PM. As a meta-heuristic inspired by the intelligent foraging behavior of honeybee swarm, ABC has some features such as simplicity and ease of implementation, and it has been successfully applied to deal with various production scheduling problems [35–39] and notable advantages of ABC in solving UPMSP [36–40] are proved by computational results. The energy-efficient UPMSP with additional resources and PM is an extended version of the UPMSP. It is still composed of the same sub-problems as UPMSP [36–40]. ABC has some particular features. It also has successfully applied to hand various UPMSP. There are close relations between UPMSP and its extended version. These three things reveal that ABC has potential optimization advantages in solving energy-efficient UPMSP with additional resources and PM, which is why ABC is chosen.
In this study, energy consumption, additional resources and PM are integrated into UPMSP and an effective way is provided for the problem by adding some new dynamical optimization mechanisms into ABC. The main contributions are summarized as follows. (1) Energy-efficient UPMSP with PM and additional resources is considered. (2) The dynamical artificial bee colony (DABC) is presented to minimize makespan and total energy consumption. Three heuristics are used in the initialization. Employed bee swarm and onlooker bee swarm are constructed and computing resources are shifted from the dominated solutions to non-dominated solutions in each swarm when the given condition is met. The dynamical employed bee phase is implemented by computing resource shifting and solution migration. The Dynamical onlooker bee phase involves computing resource shifting and feedback. This phase is applied to dynamically select search operators based on global and neighborhood searches. (3) Many experiments are conducted. The computational results demonstrate that new strategies of DABC are effective and that DABC has promising advantages in solving the considered UPMSP.
The remainder of the paper is organized as follows. Problem description is given in Section 2. Section 3 shows DABC for the considered problem. Section 4 gives numerical experiments on DABC and Section 5 shows the conclusions and some topics of future research are provided.
Energy-efficient UPMSP with additional resources and PM is composed of
PM is considered. There is a time interval between two consecutive PMs, during which jobs are processed. For
Machine
The mathematical mode of the problem is shown below:
where
Eqs. (1) and (2) are about objectives. Constraint (3) indicates that job
For energy-efficient UPMSP with
An illustrative example with 2 machines and 8 jobs is given, the matrix of processing time and matrix of additional resource are provided in Eqs. (12) and (13),
Fig. 1 shows a schedule, in which 6 (7) as an example indicates job
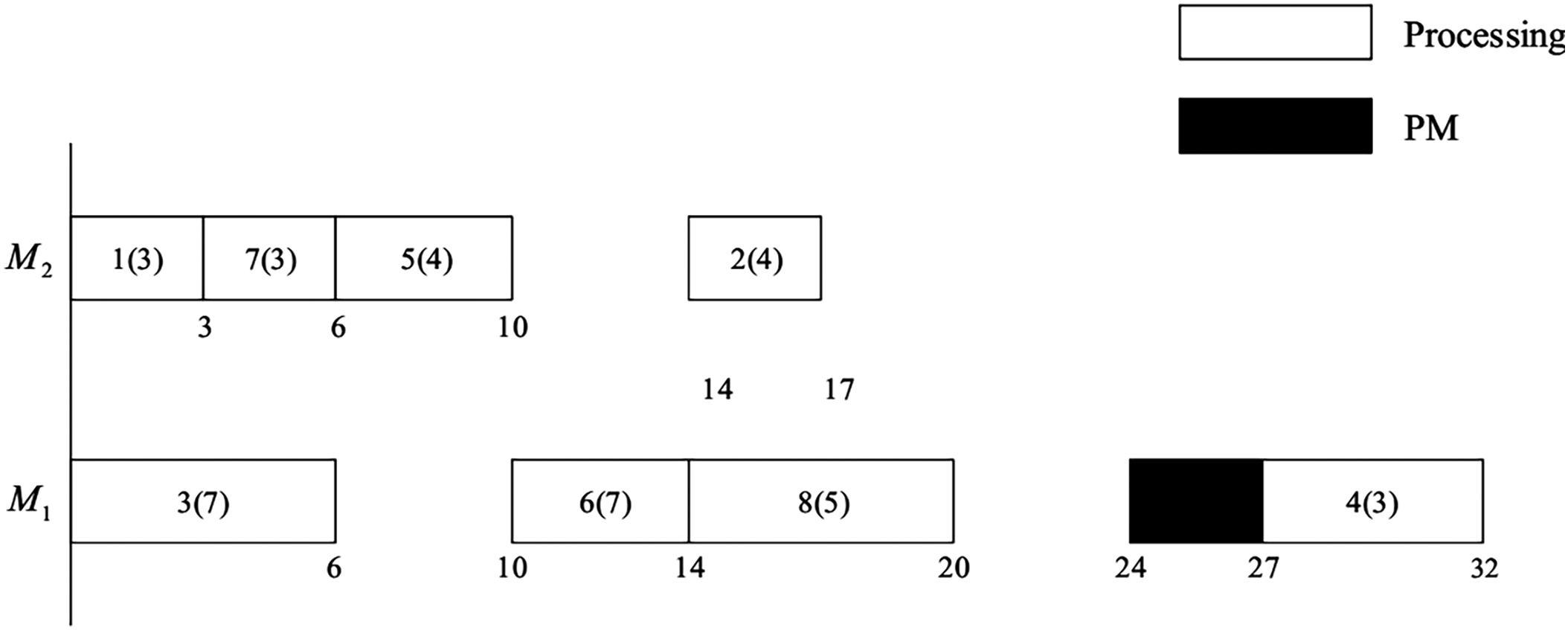
Figure 1: A schedule of example
3 DABC for Energy-Efficient UPMSP with Additional Resource and PM
Dynamical optimization mechanisms such as feedback and competition have been successfully used in ABC to adjust dynamically search operators or search behaviors [41–45]. The search advantages of dynamical mechanisms are tested and proved. In this study, dynamical optimization mechanism is implemented by computing resource shifting, solution migration and feedback.
Lei et al. [26] proposed a two-string representation. For energy-efficient UPMSP with
The decoding procedure is described as follows:
(1) Obtain job permutation
(2) Start with
For the example in Section 2, a solution consists of
Heuristic 3 is used for each of
3.2 Dynamically Employed Bee Phase
Six neighborhood structures are used.
Algorithm 1 describes the detailed steps of dynamical employed bee phase, where
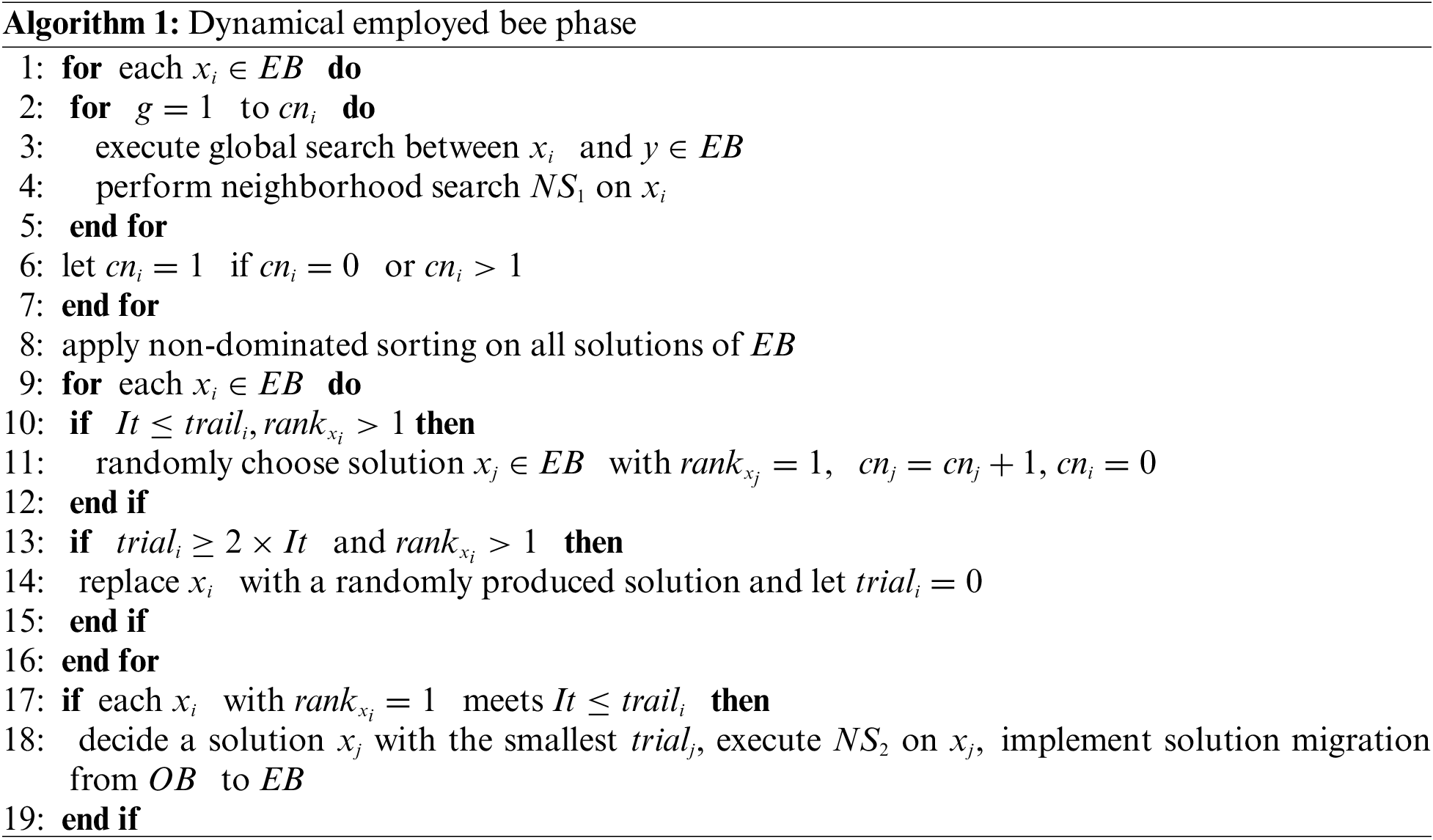
Global search between
Neighborhood search
Solution migration is described below. Define
For solution
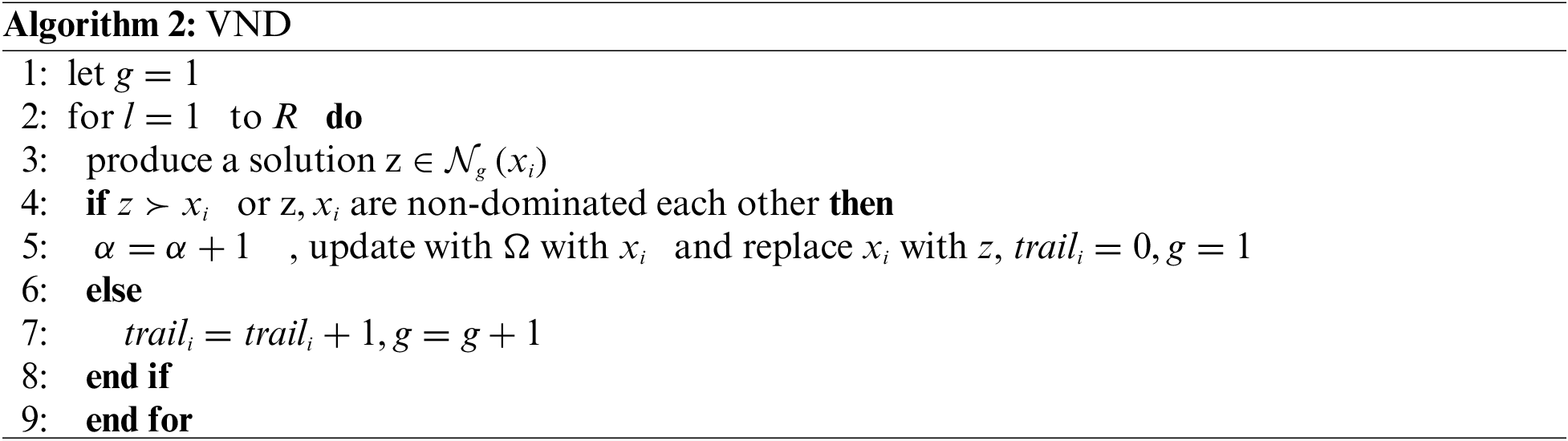
Neighborhood search
In dynamical employed bee phase, some dominated solutions with
3.3 Dynamical Onlooker Bee Phase
Four search operators
Adaptive process is depicted below. Choose a neighborhood structure by roulette selection based on
In
In
In onlooker bee phase, for each
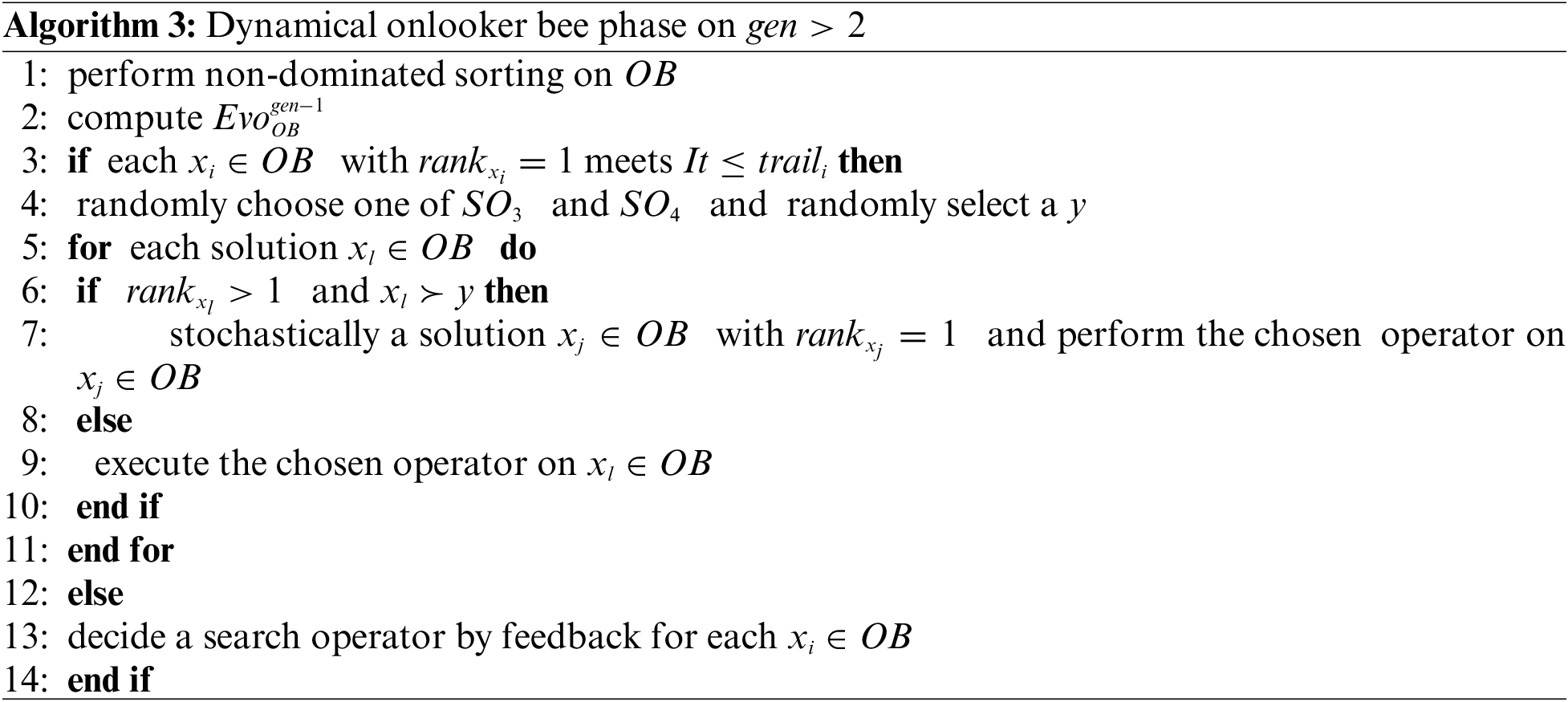
Algorithm 3 describes dynamical onlooker bee phase on generation
where
Feedback is dynamical process used in control. In this study, feedback is applied to decide one of
In dynamical onlooker bee phase, for each
In Algorithm 1, the search operator is combination of global search and neighborhood search
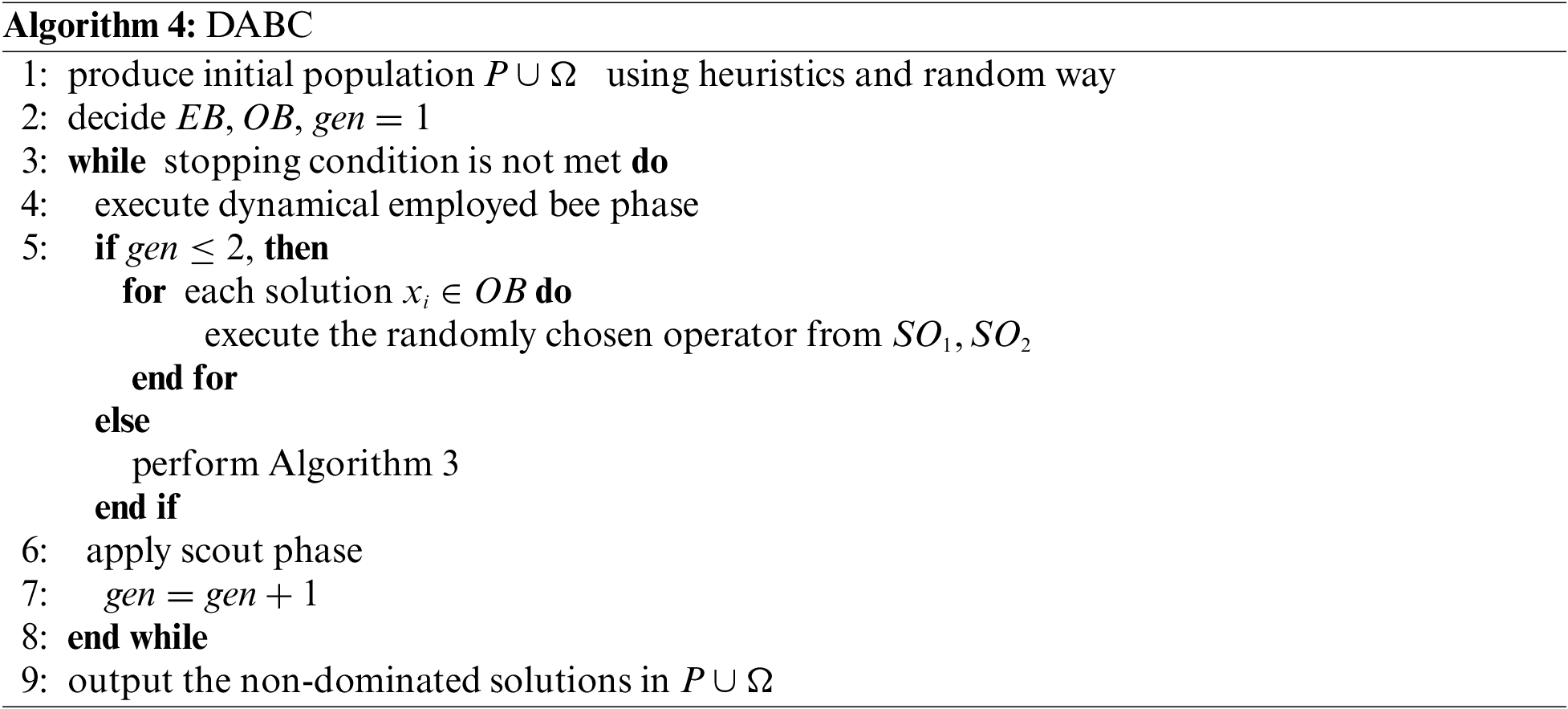
The detailed steps of DABC are shown in Algorithm 4.
Scout phase is described as follows. For each solution
Unlike the previous ABC [36–40], DABC has the following new features. (1) The initial population is produced by three heuristics. (2) Dynamical employed bee phase is implemented by using computing resource shifting and solution migration. (3) Four search operators are used and dynamical onlooker bee phase is performed by applying computing resource shifting and feedback. The above dynamical optimization mechanisms such as solution migration and feedback can decide the number of searches and adjust solutions of swarms and search operator dynamically, as a result, search efficiency can be improved. On the other hand, many new things are required to be implemented when DABC is used, this may be a disadvantage of DABC.
Extensive experiments are conducted to test the performance of DABC for energy-efficient UPMSP with additional resource and PM. All experiments are implemented by using Microsoft Visual C++ 2019 and run on 8.0 G Random Access Memory 2.30 GHz Central Processing Unit Personal Computer.
4.1 Test Instances, Metrics and Comparative Algorithms
Fanjul-Peyro et al. [8] provided 300 instances, which can be divided into 30 types and the size of each type is depicted as
Metric
Metric
Metric
where
Lei et al. [23] proposed NICA for multi-objective UPMSP with PM. Shahidi-Zadeh et al. [3] presented a multi-objective harmony search (MOHS) for UPMSP. Zhang et al. [34] developed CEA for energy-efficient UPMSP with makespan and total energy consumption. These algorithms can be used to solve energy-efficient UPMSP with additional resource and PM after related steps on additional resource and PM are added into decoding procedure; moreover, they have promising advantages in solving UPMSP, so they are chosen as comparative algorithms.
ABC is used to show the effect of new strategies of DABC. ABC is constructed as follows: in employed bee phase, Lines 1–10 with
DABC has following parameters:
An empirical method was used to determine the settings for other parameters by using the instance
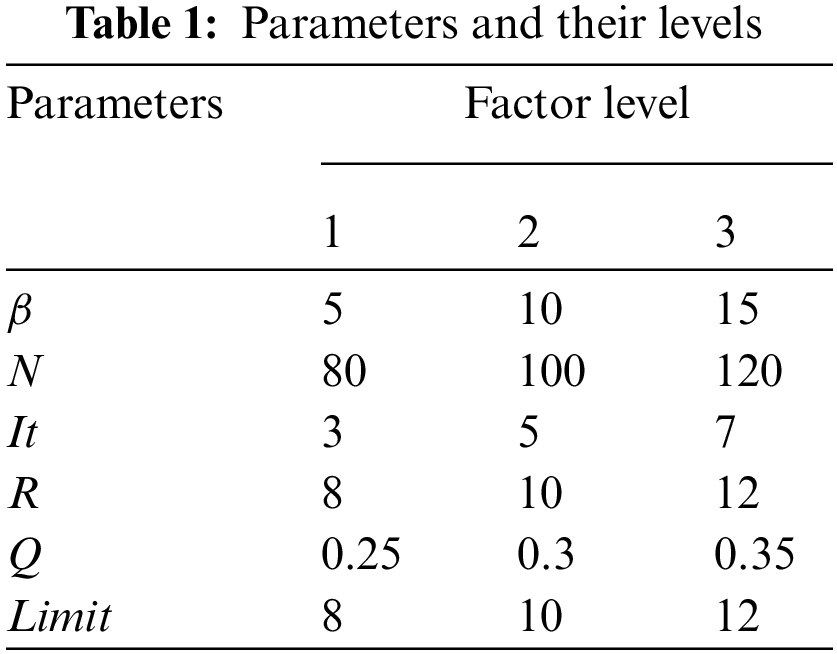
Fig. 2 shows the results of
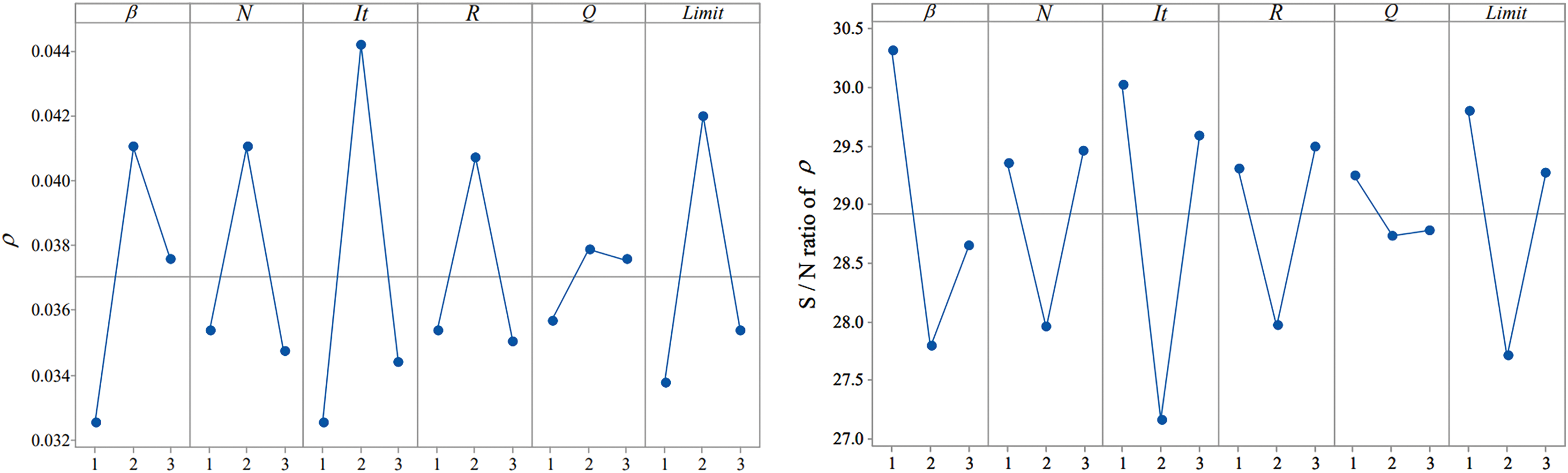
Figure 2: Main effect plot for mean and S/N ratio
ABC has
Parameter settings of three comparative algorithms are directly selected from References [3,23,34] except that the stopping condition. To compare fairly, all algorithms should be stopped under the same condition, so MOHS, CEA and NICA are given the same stopping condition as DABC. We conducted experiments on other parameters of comparative algorithms, the experimental results show that each comparative algorithm with parameter settings from [3,23,34] can produce better results than the same algorithm with other parameter settings, so the original parameter settings are still used.
DABC, its three comparative algorithms and ABC are compared. Each algorithm randomly runs 10 times for each instance. Tables 2–9 describe the corresponding results of five algorithms. D, A, N, M, C denote DABC, ABC, NICA, MOHS and CEA. Fig. 3 shows the distribution of non-dominated solutions obtained by all algorithms.
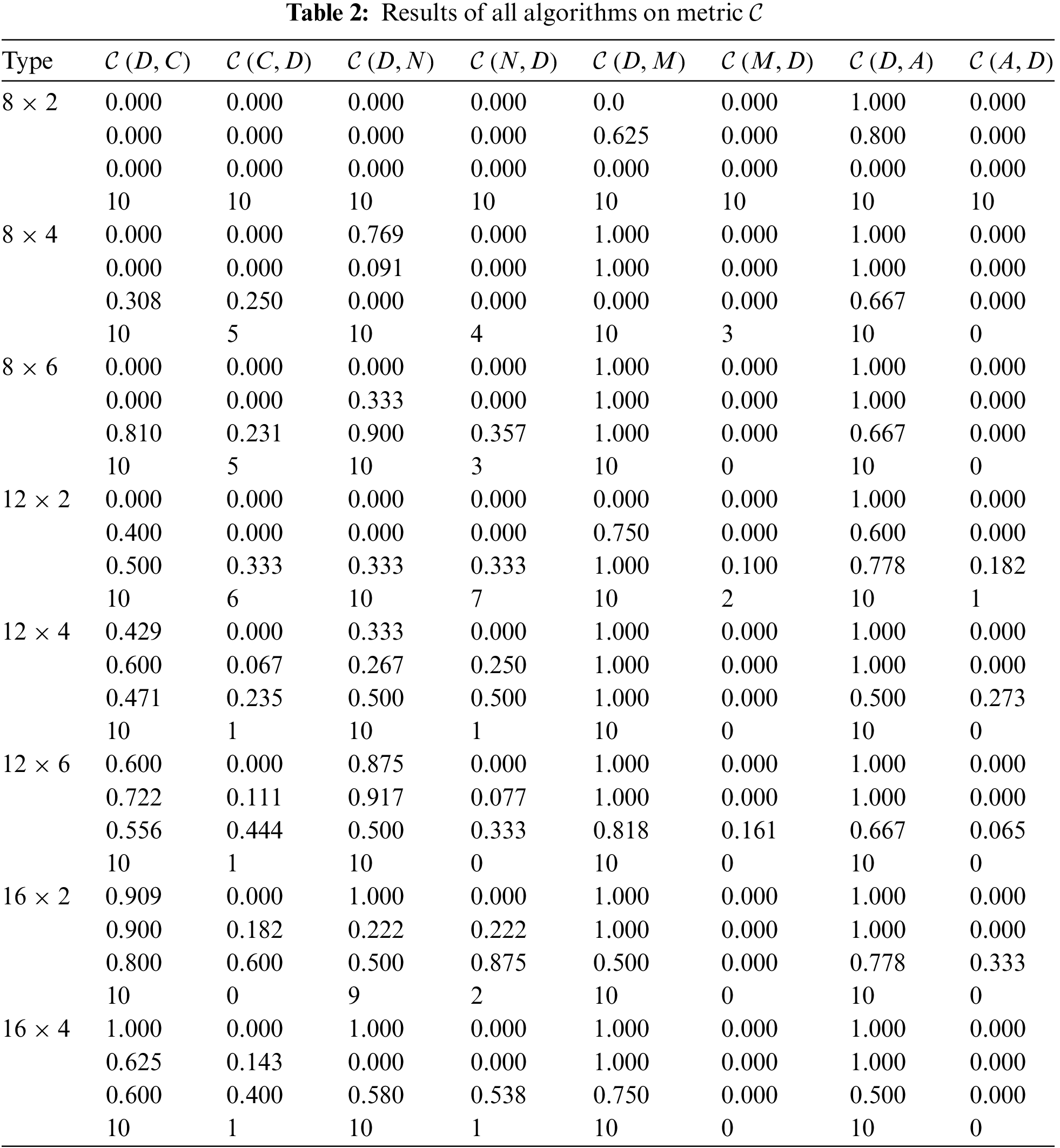
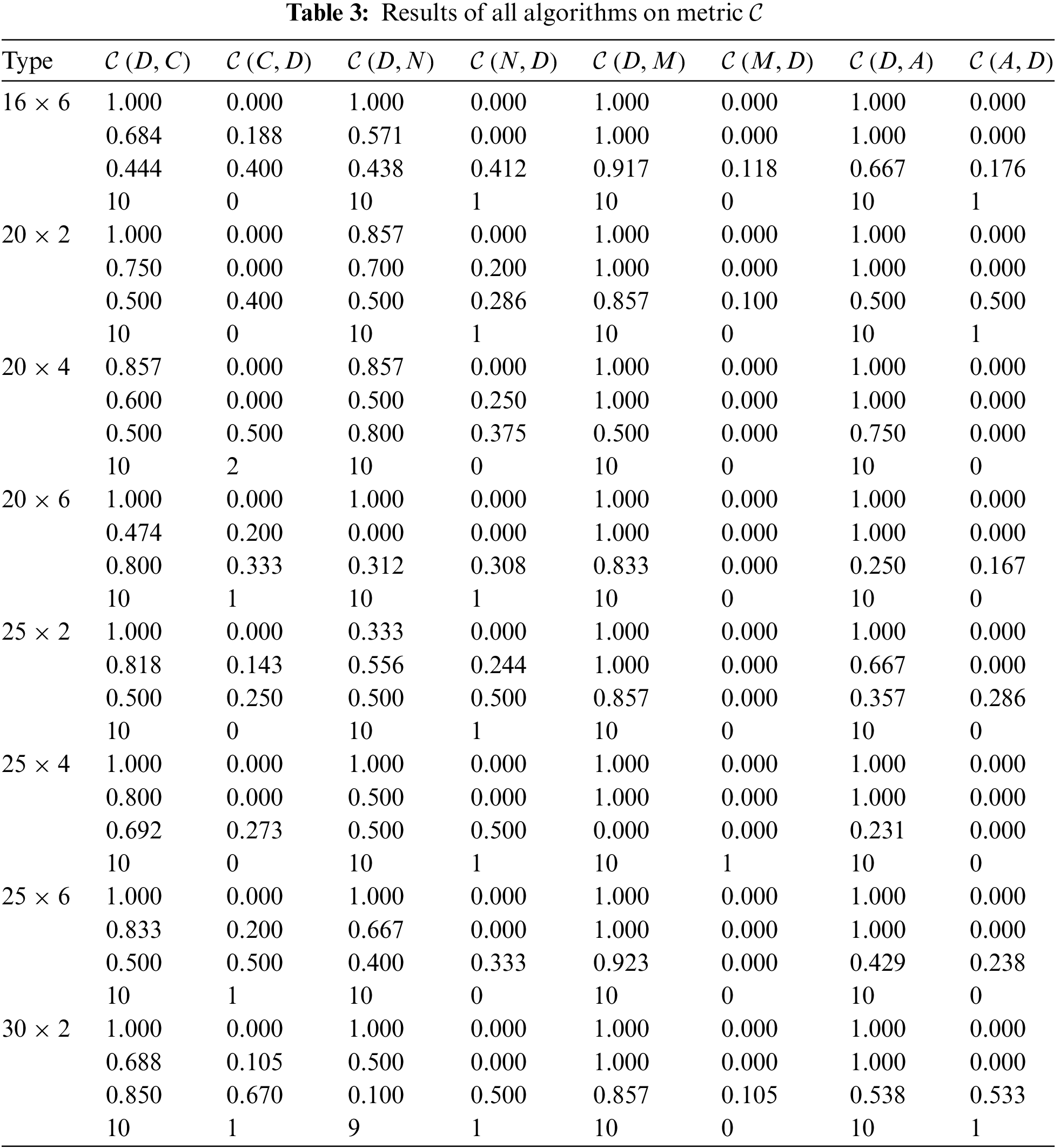
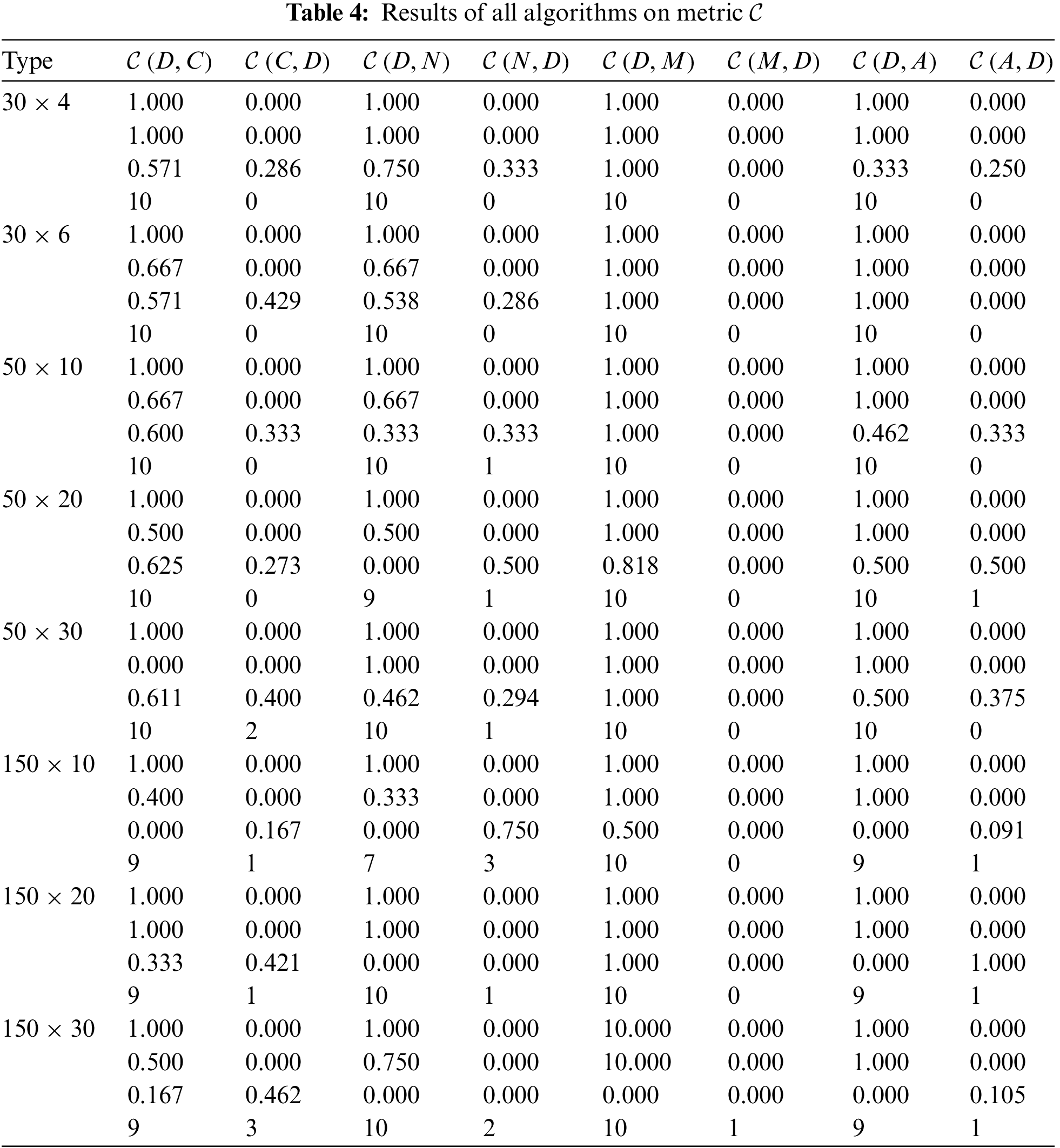
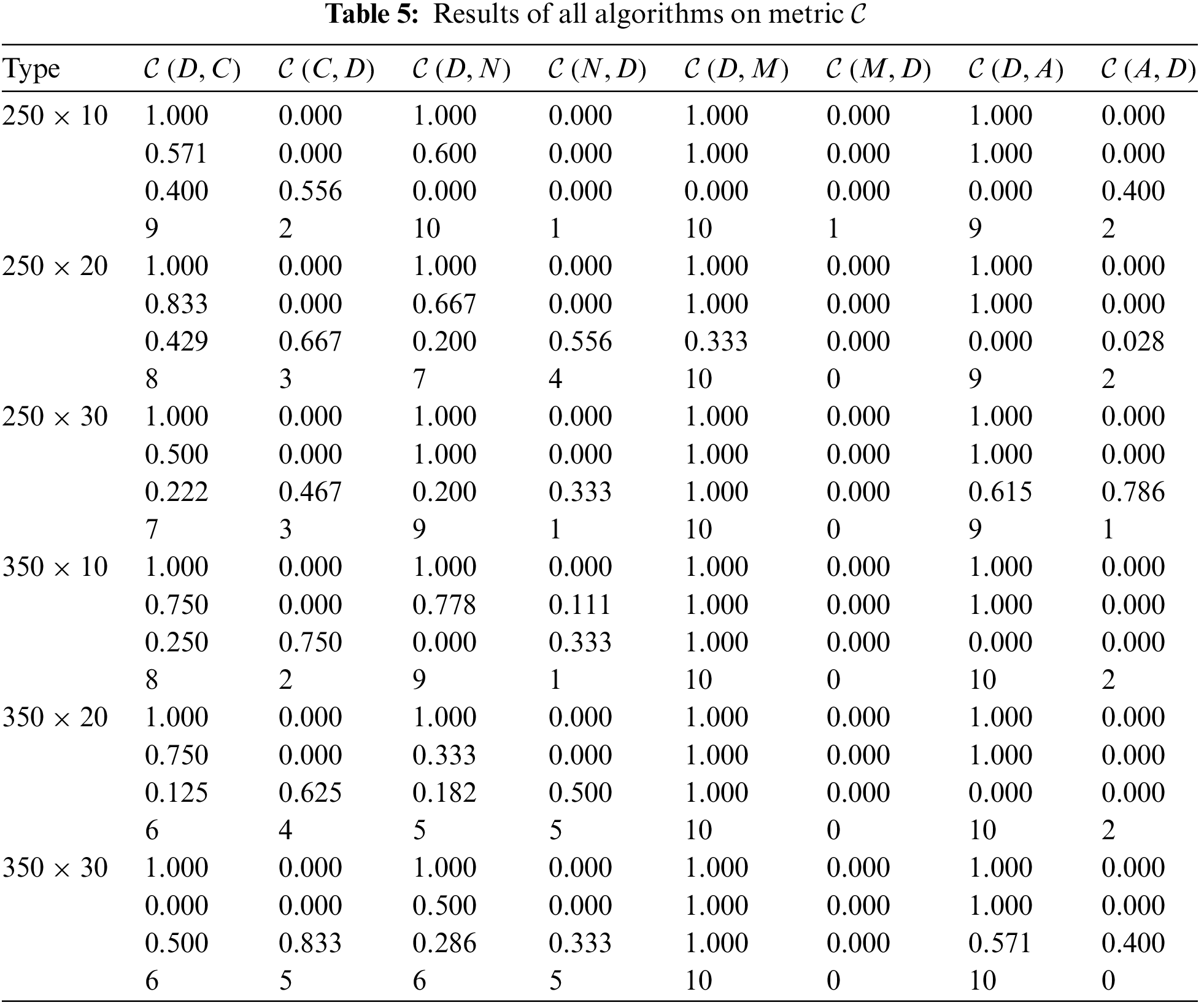
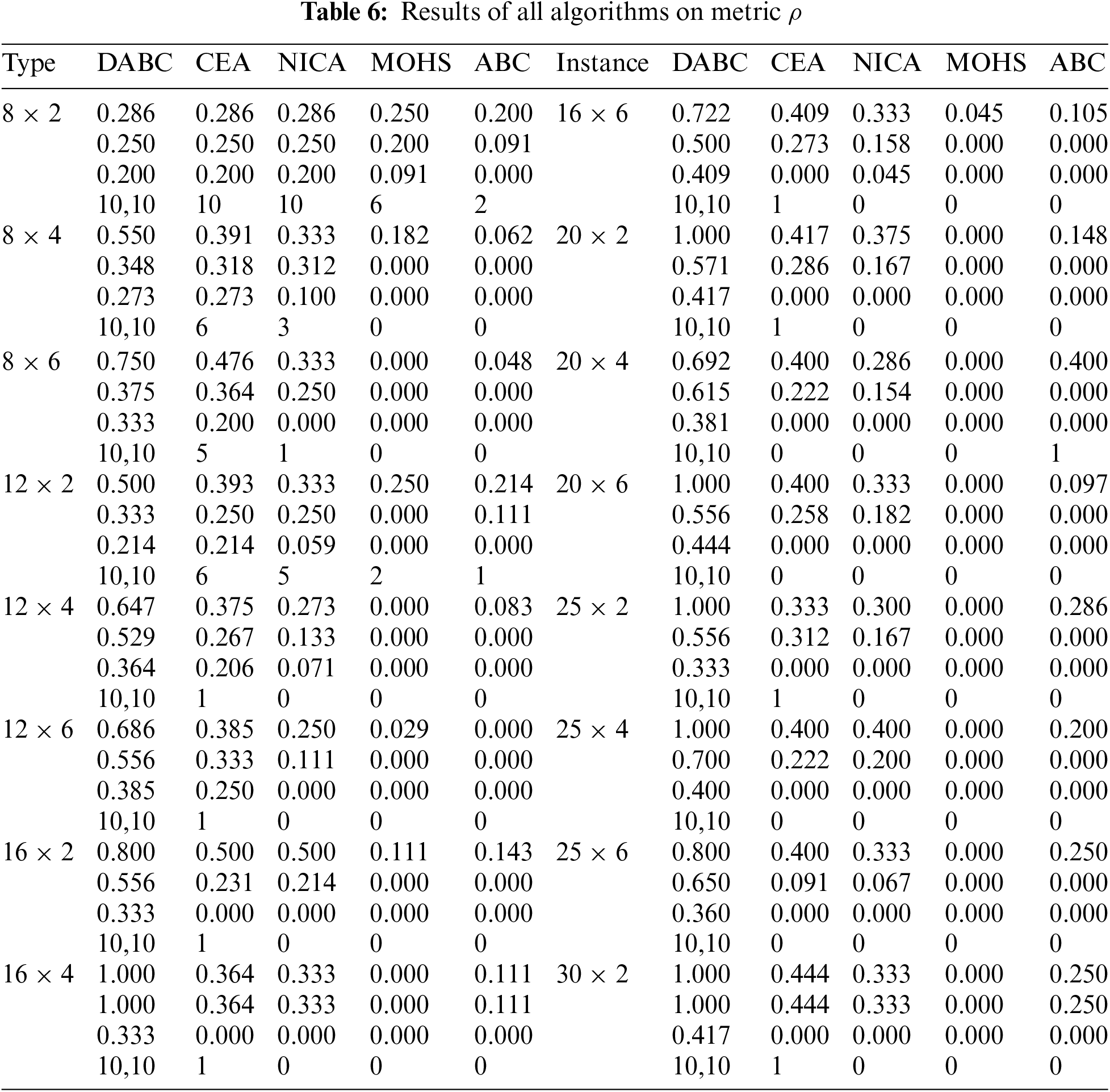
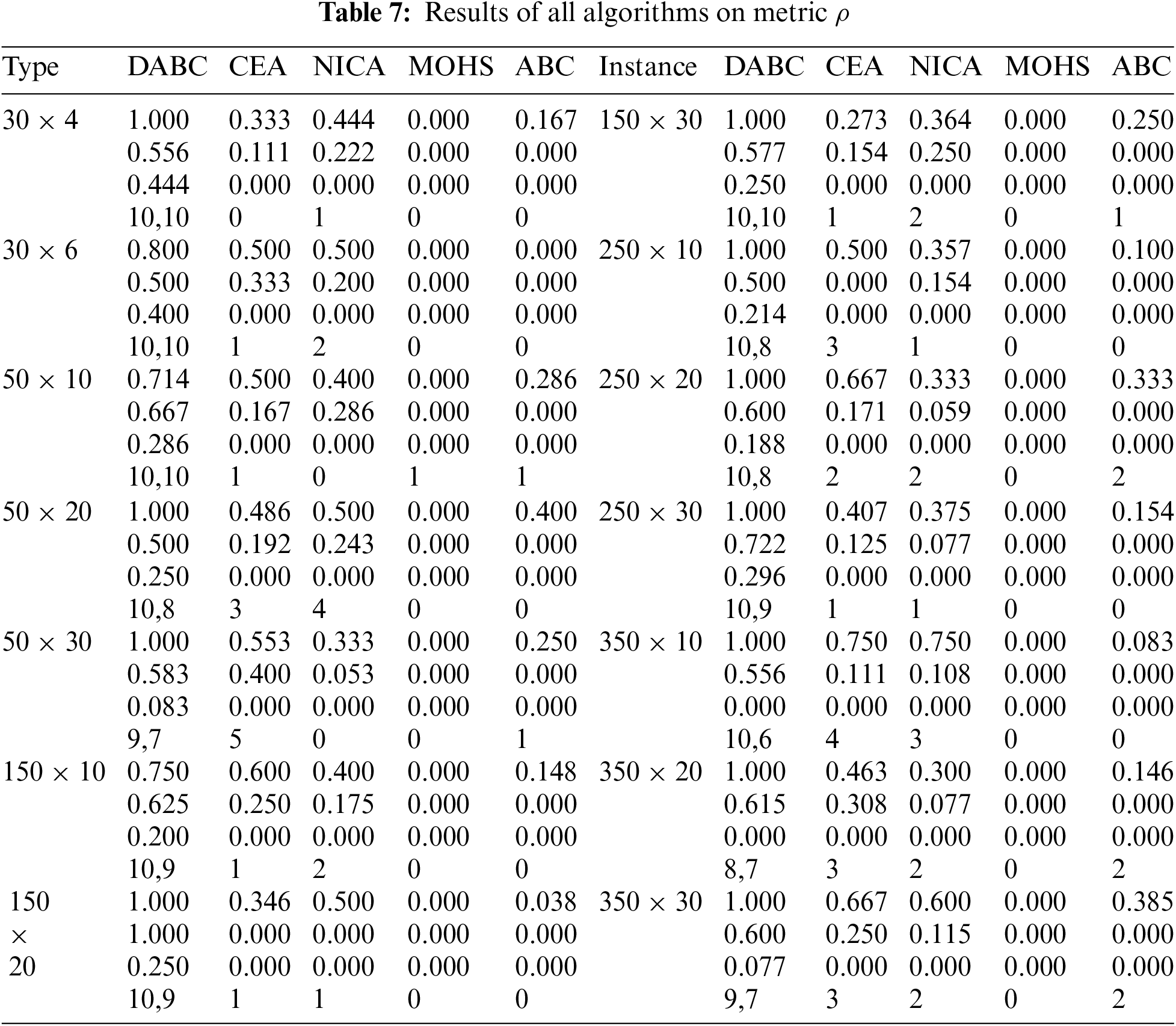
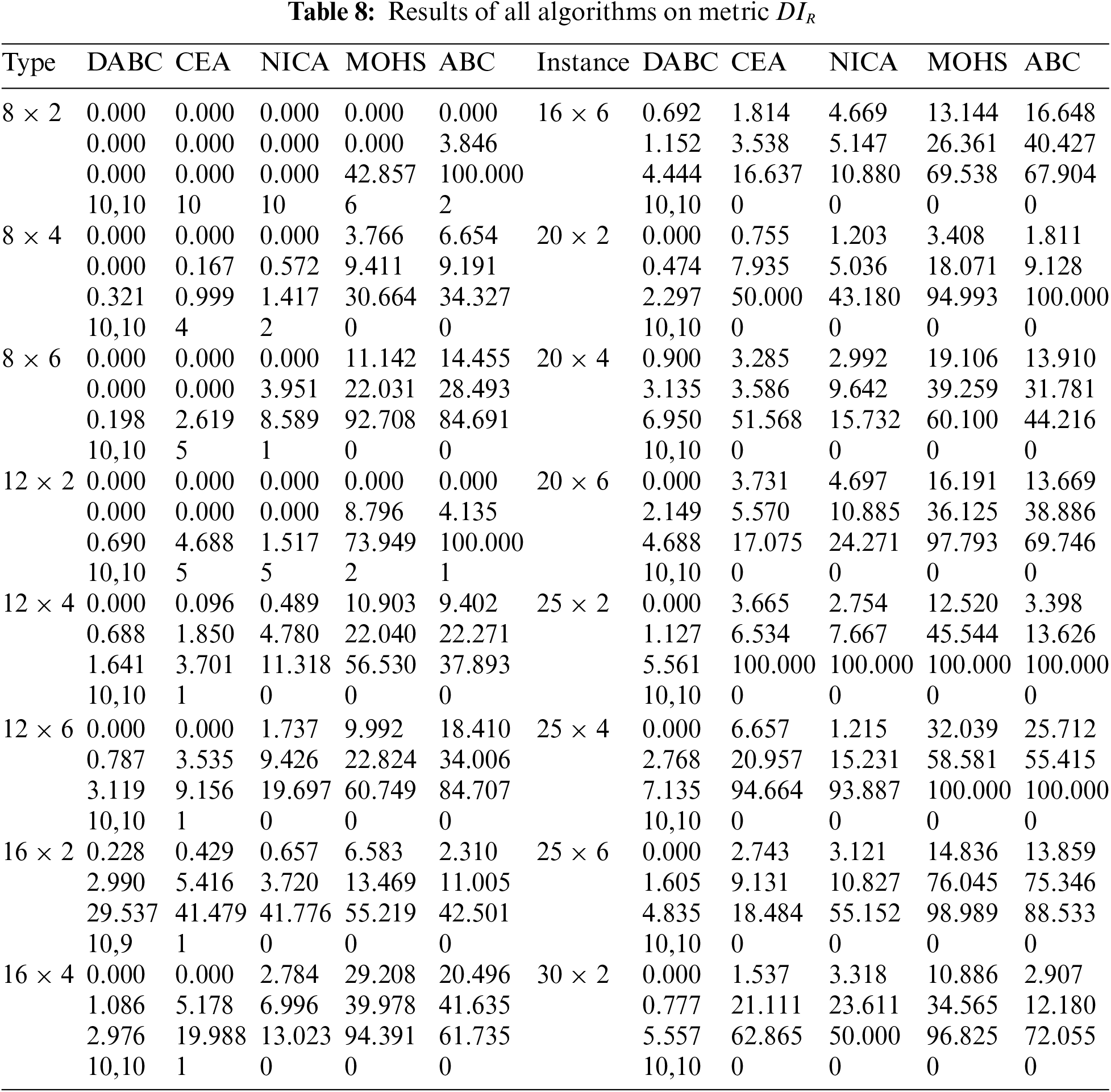
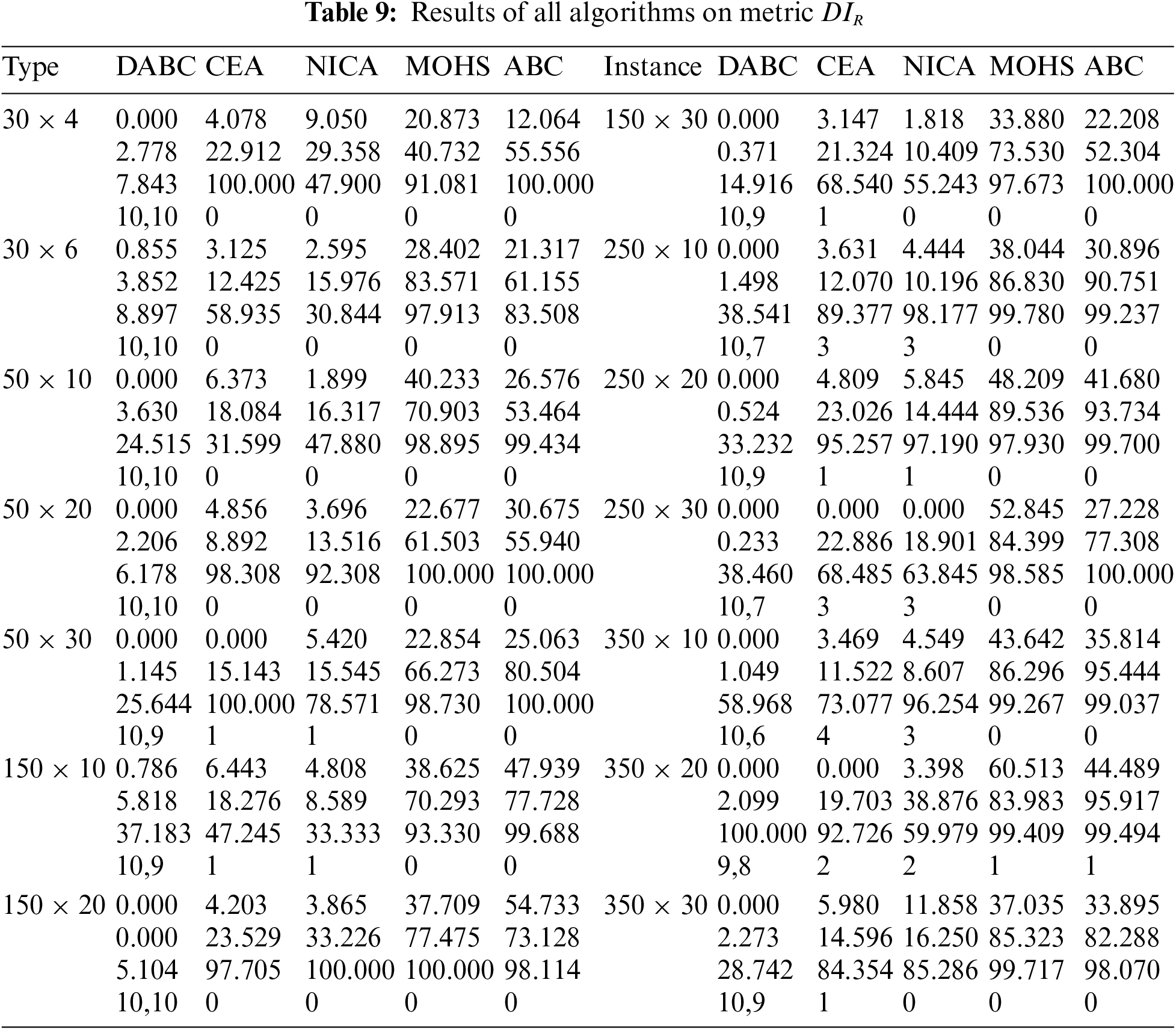
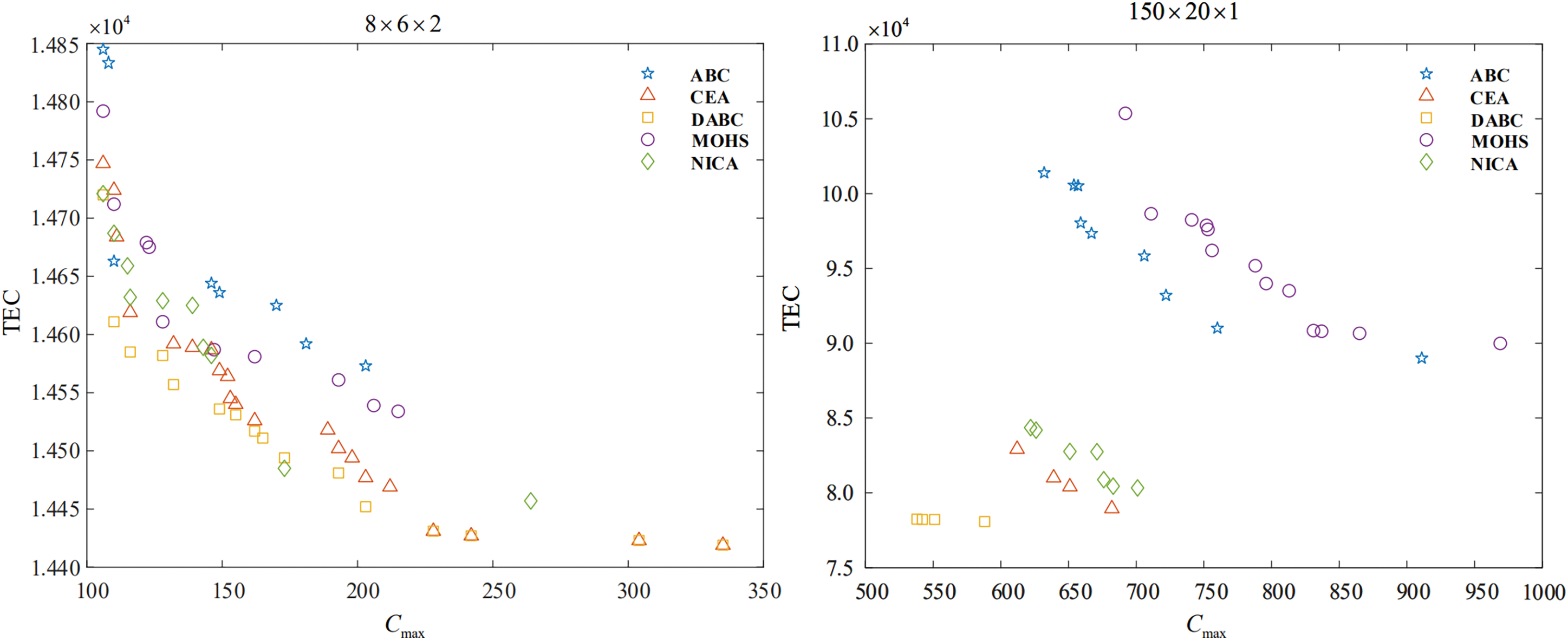
Figure 3: Distribution of non-dominated solutions of five algorithms
An effective way is applied to show results of five algorithms on 300 instances. In Tables 2–5, for each type
For type
The same way is used to decide four group for
In Tables 6, 7, for each type
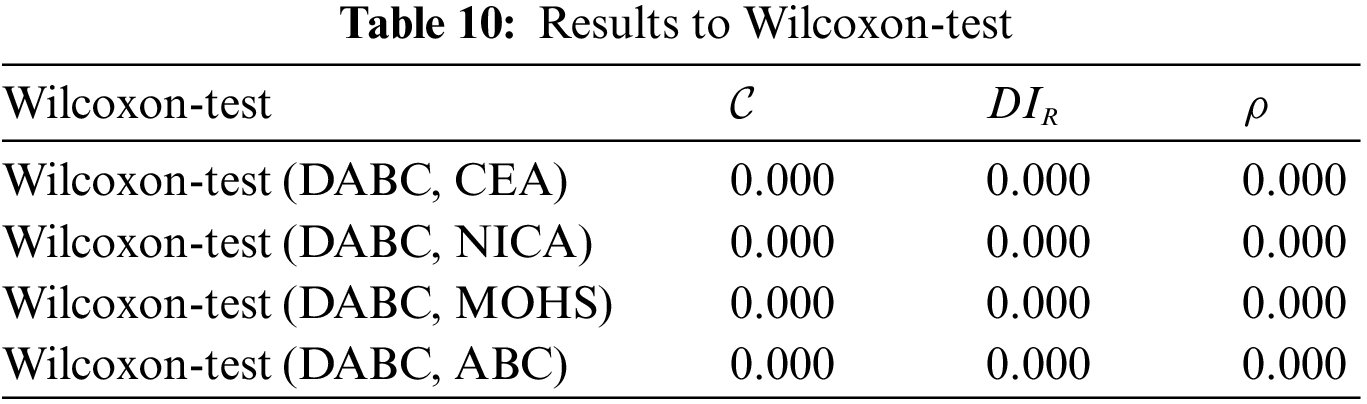
Table 10 gives the results of pair-sample Wilcoxon-test, in which Wilcoxon-test (A, B) means a test conducted to judge whether Algorithm A gives a better sample mean than B and data on columns 2–4 are
As shown in Tables 2–5, DABC obtains the smaller value of
Tables 6, 7 show that
Tables 2–5 show that DABC produces smaller
As listed in Tables 2–5, DABC has smaller
The above analyses reveal that DABC performs better than MOHS, NICA and CEA. In DABC, three dynamical adjustment strategies are implemented, which are computing resource shifting, feedback and solution migration. Computing resource shifting can lead to extensive usage of non-dominated solutions, solution migration can increase the diversity of employed bee swarms and feedback based on four operators can result in the dynamical adjustment of the search operators according to search behavior. These strategies can effectively extend exploration ability, keep a high diversity of population and lead to a low possibility of falling local optima, thus, DABC is a promising method for energy-efficient UPMSP with additional resources and PM.
Additional resources, maintenance and energy are often considered in UPMSP; however, the existing researches seldom deal with these three things together in UPMSP. In this study, energy-efficient UPMSP with additional resources and PM is addressed, and a new algorithm called DABC is proposed to minimize makespan and total energy consumption. In DABC, some dynamical optimization mechanisms are implemented. The dynamic employed bee phase involves computing resource shifting and solution migration. The dynamical onlooker bee phase is applied by computing resource shifting and feedback. Extensive experiments are conducted on 300 instances. The computational results show that the new strategies such as the dynamical employed bee phase are effective and DABC can provide better results than its comparative algorithms.
UPMSP with several real-life conditions and constraints has attracted some attention. We will focus on UPMSP by involving additional resources, machine eligibility, and SDST, addressing these problems through meta-heuristics combined with new optimization mechanisms such as reinforcement learning and competition among sub-populations. We also handle distributed hybrid flow shop scheduling problems with some practical constraints in the near future. Additionally, distributed assembly scheduling problems involving transportation will be among our future research topics.
Acknowledgement: The authors would like to thank the editors and reviewers for their valuable work, as well as the supervisor and family for their valuable support during the research process.
Funding Statement: This research was funded by the National Natural Science Foundation of China (grant number 61573264).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Deming Lei, Shaosi He; data collection: Yizhuo Zhu; analysis and interpretation of results: Deming Lei, Shaosi He, Yizhuo Zhu; draft manuscript preparation: Deming Lei, Yizhuo Zhu, Shaosi He. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data supporting this study are described in the first paragraph of Section 4.1.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. T. C. E. Cheng and C. C. S. Sin, “A state-of-the-art review of parallel-machine scheduling research,” Eur. J. Oper. Res., vol. 47, no. 3, pp. 271–292, 1990. doi: 10.1016/0377-2217(90)90215-W. [Google Scholar] [CrossRef]
2. E. Mokotoff, “Parallel machine scheduling problems: A survey,” Asia-Pacific. J. Oper. Res., vol. 18, pp. 193–242, 2011. [Google Scholar]
3. B. Shahidi-Zadeh, R. Tavakkoli-Moghaddam, A. Taheri-Moghadam, and I. Rastgar, “Solving a bi-objective unrelated parallel batch processing machines scheduling problem: A comparison study,” Comput. Oper. Res., vol. 88, no. 6, pp. 71–90, 2017. doi: 10.1016/j.cor.2017.06.019. [Google Scholar] [CrossRef]
4. C. Wang, X. Li, and Y. Gao, “A novel collaborative evolutionary algorithm with two-population for multi-objective flexible job shop scheduling,” Comput. Model. Eng. Sci., vol. 137, no. 2, pp. 1849–1870, 2023. doi: 10.32604/cmes.2023.028098. [Google Scholar] [CrossRef]
5. L. Wang and Y. Qi, “Scheduling an energy-aware parallel machine system with deteriorating and learning effects considering multiple optimization objectives and stochastic processing time,” Comput. Model. Eng. Sci., vol. 135, no. 1, pp. 325–339, 2023. doi: 10.32604/cmes.2022.019730. [Google Scholar] [CrossRef]
6. J. A. Ventura and D. Kim, “Parallel machine scheduling with earliness-tardiness penalties and additional resource constraints,” Comput. Oper. Res., vol. 30, no. 13, pp. 1945–1958, 2003. doi: 10.1016/S0305-0548(02)00118-1. [Google Scholar] [CrossRef]
7. X. L. Zheng and L. Wang, “A two-stage adaptive fruit fly optimization algorithm for unrelated parallel machine scheduling problem with additional resource constraints,” Expert. Syst. Appl., vol. 65, no. 9–12, pp. 28–39, 2016. doi: 10.1016/j.eswa.2016.08.039. [Google Scholar] [CrossRef]
8. L. Fanjul-Peyro, F. Perea, and R. Ruiz, “Models and matheuristics for the unrelated parallel machine scheduling problem with additional resources,” Eur. J. Oper. Res., vol. 260, no. 2, pp. 482–493, 2017. doi: 10.1016/j.ejor.2017.01.002. [Google Scholar] [CrossRef]
9. K. Fleszar and K. S. Hindi, “Algorithms for the unrelated parallel machine scheduling problem with a resource constraint,” Eur. J. Oper. Res., vol. 271, no. 3, pp. 839–848, 2018. doi: 10.1016/j.ejor.2018.05.056. [Google Scholar] [CrossRef]
10. X. L. Zheng and L. Wang, “A collaborative multiobjective fruit fly optimization algorithm for the resource constrained unrelated parallel machine green scheduling problem,” IEEE Trans. Syst. Man Cyber. Syst., vol. 48, no. 5, pp. 790–800, 2018. doi: 10.1109/TSMC.2016.2616347. [Google Scholar] [CrossRef]
11. F. Villa, E. Vallada, and L. Fanjul-Peyro, “Heuristic algorithms for the unrelated parallel machine scheduling problem with one scarce additional resource,” Expert. Syst. Appl., vol. 93, pp. 28–38, 2018. doi: 10.1016/j.eswa.2017.09.054. [Google Scholar] [CrossRef]
12. M. Afzalirad and M. Shafipour, “Design of an efficient genetic algorithm for resource-constrained unrelated parallel machine scheduling with machine eligibility restrictions,” J. Intell. Manuf., vol. 29, no. 2, pp. 423–437, 2018. doi: 10.1007/s10845-015-1117-6. [Google Scholar] [CrossRef]
13. E. Vallada, F. Villa, and L. Fanjul-Peyro, “Enriched metaheuristics for the resource unrelated parallel machine scheduling problem,” Comput.Oper. Res., vol. 111, pp. 415–424, 2019. [Google Scholar]
14. I. M. Al-Harkan and A. A. Qamhan, “Optimize unrelated parallel machine scheduling problems with multiple limited additional resources, sequence-dependent setup times and release date constraints,” IEEE Access, vol. 7, pp. 171533–171547, 2019. doi: 10.1109/ACCESS.2019.2955975. [Google Scholar] [CrossRef]
15. L. Fanjul-Peyro, “Models and an exact method for the unrelated parallel machine scheduling problem with setups and resources,” Expert Syst. Appl. X, vol. 5, 2020, Art. no. 100022. [Google Scholar]
16. A. Lopez-Esteve, F. Perea, and J. C. Yepes-Borrero, “GRASP algorithm for the unrelated parallel machines scheduling problem with additional resources during processing and setups,” Int. J. Prod. Res., vol. 61, no. 17, pp. 6013–6029, 2023. doi: 10.1080/00207543.2022.2121869. [Google Scholar] [CrossRef]
17. Y. Pinar and T. Y. Seyda, “Constraint programming approach for multiresource-constrained unrelated parallel machine scheduling problem with sequence-dependent setup times,” Int. J. Prod. Res., vol. 60, no. 7, pp. 2212–2229, 2022. doi: 10.1080/00207543.2021.1885068. [Google Scholar] [CrossRef]
18. D. L. Yang, T. C. E. Cheng, S. J. Yang, and C. J. Hsu, “Unrelated parallel machine scheduling with aging effects and multi-maintenance activities,” Comput. Oper. Res., vol. 39, no. 7, pp. 1458–1464, 2012. doi: 10.1016/j.cor.2011.08.017. [Google Scholar] [CrossRef]
19. S. J. Wang and M. Liu, “Multi-objective optimization of parallel machine scheduling integrated with multi-resources preventive maintenance planning,” J. Manuf. Syst., vol. 37, no. 7, pp. 182–192, 2015. doi: 10.1016/j.jmsy.2015.07.002. [Google Scholar] [CrossRef]
20. A. Gara-Ali, G. Finke, and G. Espinouse, “Parallel-machine scheduling with maintenance: Praising the assignment problem,” Eur. J. Oper. Res., vol. 252, no. 1, pp. 90–97, 2016. doi: 10.1016/j.ejor.2015.12.047. [Google Scholar] [CrossRef]
21. O. Avalos-Rosales, F. Angel-Bello, A. lvarez, and Y. Cardona-Valds, “Including preventive maintenance activities in an unrelated parallel machine environment with dependent setup times,” Comput. Ind. Eng., vol. 123, pp. 364–377, 2018. doi: 10.1016/j.cie.2018.07.006. [Google Scholar] [CrossRef]
22. M. Wang and G. H. Pan, “A novel imperialist competitive algorithm with multi-elite individuals guidance for multi-object unrelated parallel machine scheduling problem,” IEEE Access, vol. 7, pp. 121223–121235, 2019. doi: 10.1109/ACCESS.2019.2937747. [Google Scholar] [CrossRef]
23. D. M. Lei and T. Yi, “A novel shuffled frog-leaping algorithm for unrelated parallel machine scheduling with deteriorating maintenance and setup time,” Symmetry, vol. 13, no. 9, 2021, Art. no. 1574. doi: 10.3390/sym13091574. [Google Scholar] [CrossRef]
24. J. H. Pang, Y. C. Tsai, and F. D. Chou, “Feature-extraction-based iterated algorithm to solve the unrelated parallel machine problem with periodic maintenance activities,” IEEE Access, vol. 9, pp. 139089–139108, 2021. doi: 10.1109/ACCESS.2021.3118986. [Google Scholar] [CrossRef]
25. D. M. Lei and M. Y. Liu, “An artificial bee colony with division for distributed unrelated parallel machine scheduling with preventive maintenance,” Comput. Ind. Eng., vol. 141, no. 6, 2020, Art. no. 106320. doi: 10.1016/j.cie.2020.106320. [Google Scholar] [CrossRef]
26. D. M. Lei and S. S. He, “An adaptive artificial bee colony for unrelated parallel machine scheduling with additional resource and maintenance,” Expert. Syst. Appl., vol. 205, no. 2, 2022, Art. no. 117577. doi: 10.1016/j.eswa.2022.117577. [Google Scholar] [CrossRef]
27. A. Che, S. B. H. Zhang, and X. Q. Wu, “Energy-conscious unrelated parallel machine scheduling under time-of-use electricity tariffs,” J. Clean. Prod., vol. 156, no. 2, pp. 688–697, 2017. doi: 10.1016/j.jclepro.2017.04.018. [Google Scholar] [CrossRef]
28. L. P. Cota, V. N. Coelho, F. G. Guimaraes, and M. J. F. Souza, “Bi-criteria formulation for green scheduling with unrelated parallel machines with sequence-dependent setup times,” Int. Trans. Oper. Res., vol. 28, no. 2, pp. 996–1017, 2021. doi: 10.1111/itor.12566. [Google Scholar] [CrossRef]
29. J. B. Abikarram, K. McConky, and R. Proano, “Energy cost minimization for unrelated parallel machine scheduling under real time and demand charge pricing,” J. Clean. Prod., vol. 208, no. 1, pp. 232–242, 2019. doi: 10.1016/j.jclepro.2018.10.048. [Google Scholar] [CrossRef]
30. L. K. Zhang, Q. W. Deng, G. L. Gong, and W. W. Han, “A new unrelated parallel machine scheduling problem with tool changes to minimise the total energy consumption,” Int. J. Prod. Res., vol. 58, no. 22, pp. 6826–6845, 2020. doi: 10.1080/00207543.2019.1685708. [Google Scholar] [CrossRef]
31. Z. Wang and T. Y. Liu, “A novel multi-objective scheduling method for energy based unrelated parallel machines with auxiliary resource constraints,” IEEE Access, vol. 7, pp. 168688–168699, 2019. doi: 10.1109/ACCESS.2019.2954601. [Google Scholar] [CrossRef]
32. H. Saberi-Aliabad, M. Reisi-Nafchi, and G. Moslehi, “Energy-efficient scheduling in an unrelated parallel-machine environment under time-of-use electricity tariffs,” J. Clean. Prod., vol. 249, no. 2, 2020, Art. no. 119393. doi: 10.1016/j.jclepro.2019.119393. [Google Scholar] [CrossRef]
33. Z. Pei, M. Z. Wan, Z. Z. Jiang, Z. T. Wang, and X. Dai, “An approximation algorithm for unrelated parallel machine scheduling under TOU electricity tariffs,” IEEE Trans. Auto. Sci. Eng., vol. 18, no. 2, pp. 743–756, 2020. doi: 10.1109/TASE.2020.2995078. [Google Scholar] [CrossRef]
34. L. K. Zhang, Q. W. Deng, R. H. Lin, G. L. Gong, and W. W. Han, “A combinatorial evolutionary algorithm for unrelated parallel machine scheduling problem with sequence and machine-dependent setup times, limited worker resources and learning effect,” Expert. Syst. Appl., vol. 175, 2021, Art. no. 114843. doi: 10.1016/j.eswa.2021.114843. [Google Scholar] [CrossRef]
35. J. Q. Li, Q. K. Pan, and K. Z. Gao, “Pareto-based discrete artificial bee colony algorithm for multi-objective flexible job shop scheduling problem,” Int. J. Adv. Manuf. Techno., vol. 55, no. 9-12, pp. 1159–1169, 2011. doi: 10.1007/s00170-010-3140-2. [Google Scholar] [CrossRef]
36. K. C. Ying and S. W. Lin, “Unrelated parallel machine scheduling with sequence and machine-dependent setup times and due date constraints,” Int. J. Innov. Comput., vol. 8, pp. 3279–3297, 2012. [Google Scholar]
37. K. C. Ying and S. W. Lin, “ABC-based manufacturing scheduling for unrelated parallel machines with machine-dependent and job sequence-dependent setup times,” Comput. Oper. Res., vol. 51, no. 5, pp. 172–181, 2014. doi: 10.1016/j.cor.2014.05.013. [Google Scholar] [CrossRef]
38. E. Caniyilmaz, B. Benli, and M. S. Ilkay, “An artificial bee colony algorithm approach for unrelated parallel machine scheduling with processing set restrictions, job sequence-dependent setup times, and due date,” Int. J. Adv. Manuf. Technol., vol. 77, no. 9–12, pp. 2105–2115, 2015. doi: 10.1007/s00170-014-6614-9. [Google Scholar] [CrossRef]
39. S. J. Lu, X. B. Liu, J. Pei, M. T. Thai, and P. M. Pardalos, “A hybrid ABC-TS algorithm for the unrelated parallel-batching machines scheduling problem with deteriorating jobs and maintenance activity,” Appl. Soft Comput., vol. 66, no. 2, pp. 168–182, 2018. doi: 10.1016/j.asoc.2018.02.018. [Google Scholar] [CrossRef]
40. D. M. Lei, Y. Yuan, and J. C. Cai, “An improved artificial bee colony for multi-objective distributed unrelated parallel machine scheduling,” Int. J. Prod. Res., vol. 59, no. 17, pp. 5259–5271, 2020. doi: 10.1080/00207543.2020.1775911. [Google Scholar] [CrossRef]
41. J. Q. Li and Y. Q. Han, “A hybrid multi-objective artificial bee colony algorithm for flexible task scheduling problems in cloud computing system,” Cluster Comput., vol. 23, no. 4, pp. 2483–2499, 2020. doi: 10.1007/s10586-019-03022-z. [Google Scholar] [CrossRef]
42. T. Meng and Q. K. Pan, “A distributed heterogeneous permutation flowshop scheduling problem with lot-streaming and carryover sequence-dependent setup time,” Swarm Evol. Comput., vol. 60, no. 9, 2021, Art. no. 100804. doi: 10.1016/j.swevo.2020.100804. [Google Scholar] [CrossRef]
43. D. W. Gong, Y. Y. Han, and J. Y. Sun, “A novel hybrid multi-objective artificial bee colony algorithm for blocking lot-streaming flow shop scheduling problems,” Knowl-Based Syst., vol. 148, pp. 115–130, 2018. [Google Scholar]
44. J. Wang, D. M. Lei, and J. C. Cai, “An adaptive artificial bee colony with reinforcement learning for distributed three-stage assembly scheduling with maintenance,” Appl. Soft Comput., vol. 117, no. 2, 2022, Art. no. 108371. doi: 10.1016/j.asoc.2021.108371. [Google Scholar] [CrossRef]
45. J. Wang, H. T. Tang, and D. M. Lei, “A feedback-based artificial bee colony algorithm for energy-efficient flexible flow shop scheduling problem with batch processing machines,” Appl. Soft Comput., vol. 153, no. 1, 2024, Art. no. 111254. doi: 10.1016/j.asoc.2024.111254. [Google Scholar] [CrossRef]
46. K. Deb, A. Pratap, S. Agarwal, and T. Meyarivan, “A fast and elitist multiobjective genetic algorithm: NSGA-II,” IEEE Trans. Evolu. Comput., vol. 6, no. 2, pp. 182–197, 2002. doi: 10.1109/4235.996017. [Google Scholar] [CrossRef]
47. E. Zitzler and L. Thiele, “Multi-objective evolutionary algorithms: A comparative case study and the strength Pareto approach,” IEEE Trans. Evolu. Comput., vol. 3, no. 4, pp. 257–271, 1999. doi: 10.1109/4235.797969. [Google Scholar] [CrossRef]
48. D. M. Lei, “Pareto archive particle swarm optimization for multi-objective fuzzy job shop scheduling problems,” Int. J. Adv. Manuf. Tech., vol. 37, no. 1–2, pp. 157–165, 2008. doi: 10.1007/s00170-007-0945-8. [Google Scholar] [CrossRef]
49. J. D. Knowles and D. W. Corne, “On metrics for comparing nondominated sets,” in Proc. ICAIS, New York, NY, USA, 2002, pp. 711–716. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools