
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Enhancing Safety in Autonomous Vehicle Navigation: An Optimized Path Planning Approach Leveraging Model Predictive Control
Graduate Institute of Vehicle Engineering, National Changhua University of Education, Changhua, 50007, Taiwan
* Corresponding Author: Shih-Lin Lin. Email:
Computers, Materials & Continua 2024, 80(3), 3555-3572. https://doi.org/10.32604/cmc.2024.055456
Received 27 June 2024; Accepted 07 August 2024; Issue published 12 September 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper explores the application of Model Predictive Control (MPC) to enhance safety and efficiency in autonomous vehicle (AV) navigation through optimized path planning. The evolution of AV technology has progressed rapidly, moving from basic driver-assistance systems (Level 1) to fully autonomous capabilities (Level 5). Central to this advancement are two key functionalities: Lane-Change Maneuvers (LCM) and Adaptive Cruise Control (ACC). In this study, a detailed simulation environment is created to replicate the road network between Nantun and Wuri on National Freeway No. 1 in Taiwan. The MPC controller is deployed to optimize vehicle trajectories, ensuring safe and efficient navigation. Simulated onboard sensors, including vehicle cameras and millimeter-wave radar, are used to detect and respond to dynamic changes in the surrounding environment, enabling real-time decision-making for LCM and ACC. The simulation results highlight the superiority of the MPC-based approach in maintaining safe distances, executing controlled lane changes, and optimizing fuel efficiency. Specifically, the MPC controller effectively manages collision avoidance, reduces travel time, and contributes to smoother traffic flow compared to traditional path planning methods. These findings underscore the potential of MPC to enhance the reliability and safety of autonomous driving in complex traffic scenarios. Future research will focus on validating these results through real-world testing, addressing computational challenges for real-time implementation, and exploring the adaptability of MPC under various environmental conditions. This study provides a significant step towards achieving safer and more efficient autonomous vehicle navigation, paving the way for broader adoption of MPC in AV systems.Keywords
The automotive industry is witnessing significant advancements, including the development of new energy vehicles, electric vehicles, and improved combustion efficiency for fuel vehicles. These advancements pave the way for the transition towards fully autonomous driving cars. However, control systems for autonomous vehicles (AVs) face a complex challenge: accounting for vehicle dynamics, road conditions, traffic regulations, and surrounding vehicle/pedestrian behavior. Achieving safe and comfortable autonomous driving necessitates efficient and reliable control methods. Model Predictive Control (MPC) offers a promising solution. It leverages mathematical models to predict future states and generate optimal control commands [1]. MPC controllers excel at handling system constraints within a finite time horizon, leading to enhanced stability and optimization. The work by Mayne et al. [1] highlighted the significant progress in MPC since the 1990s, particularly in its ability to manage constraints and achieve improved stability and optimality. A cornerstone of MPC is constrained nonlinear discrete-time system control, pioneered by Keerthi et al. [2]. This approach necessitates careful consideration of objective functions, constraints, and control inputs. The accuracy of the model, prediction timing, control parameters, and available computational resources all play critical roles in successful MPC implementation. Despite its complexity, MPC demonstrates strong applicability in handling nonlinear and time-varying systems, making it a valuable tool for various industrial applications. Marino et al. [3] proposed nested PID control, a feedback design employing proportional-integral-derivative (PID) operations for steering angle control. This approach contrasts with MPC, which leverages a predictive model to generate optimal control commands [1]. Both methods have been shown to be effective in sensor-equipped autonomous vehicles [4]. For intersection management, Wang et al. [5] presented a decentralized MPC method for resolving conflicts, addressing optimization problems with various constraints [6]. This approach optimizes vehicle passage within a finite horizon, often used in conjunction with PID controllers for lateral and longitudinal control [5]. The effectiveness of both MPC and PID control in this context is well-documented [4,5].
Focusing on path tracking and speed control, Chen et al. [7] investigated a novel MPC-based lateral and longitudinal controller for autonomous vehicles [8,9]. Similarly, Mata et al. [10] employed MPC for path tracking while considering input and output limitations, along with longitudinal speed adaptation. For lateral control design, Jiang et al. [11] utilized MPC to determine optimal steering angles, while a separate PID controller managed longitudinal speed. Recent advancements include distributed MPC strategies for heterogeneous vehicle platoons. Yang et al. [12] proposed a novel approach that predicts the leading human-driven vehicle’s acceleration, enhancing platoon coordination and efficiency across diverse traffic scenarios. Liu et al. [13] explored MPC for path planning, emphasizing the development of algorithms for route optimization and safety in autonomous vehicles, with the ability to adapt to dynamic driving conditions. Beyond conventional MPC, Attia et al. [14] explored Nonlinear Model Predictive Control (NMPC) for longitudinal and lateral control in fully autonomous vehicles. This method addresses challenges in lateral motion control and has shown promise in improving overall control performance through simulations [15]. Rafaila et al. [15] further explored NMPC for steering control, incorporating a lateral dynamics model, optimal control problems, and a steering control system. Their method optimizes vehicle models by minimizing a predefined loss function within a prediction horizon, demonstrating effectiveness in practical applications.
Real-time trajectory planning (RTTP) stands as a cornerstone of autonomous vehicle navigation, enabling dynamic adaptation to ever-changing environments. Febbo et al. [16] underscored the significance of RTTP by introducing a methodology that accounts for real-time modifications, ensuring optimal performance amidst dynamic conditions. Similarly, Quirynen et al. [17] and Bulsara et al. [18] proposed integrated solutions seamlessly blending motion planning with predictive control, demonstrating the effectiveness of these integrated approaches in navigating complex and unpredictable environments. Model predictive control (MPC) has emerged as a powerful tool in the arsenal of autonomous vehicle control strategies. Ostafew et al. [19] highlighted the benefits of learning-based nonlinear MPC for enhancing path tracking accuracy in vision-based mobile robots. Furthermore, Liu et al. [20–22] delved into the critical role of model fidelity in MPC-based hazard avoidance, emphasizing the impact of model accuracy on the effectiveness of obstacle avoidance strategies.
Innovations in MPC extend to hybrid and nonlinear models, as demonstrated by Zhang et al. [23] and Du et al. [24], who explore computationally aware control and genetic-algorithm-based MPC schemes, respectively. These studies contribute to the development of more efficient and adaptable control mechanisms for autonomous vehicles, addressing the computational challenges associated with complex models. Recent research has explored multi-modal model predictive control as a means to enhance vehicle control on highways. Adajania et al. [25] and Ye et al. [26] discussed the implementation of such approaches, highlighting their potential to improve lateral control and overall vehicle safety, particularly in the context of high-speed highway driving scenarios. Decentralized planning and control are gaining traction as a promising approach for tackling complex autonomous vehicle navigation challenges. Studies like those by Toumieh et al. [27] and Yanumula et al. [28] examined the benefits of decentralized MPC and trajectory planning in multi-agent systems and lane-free traffic environments, respectively. These decentralized approaches offer enhanced scalability and robustness in dynamic and unpredictable environments. The breadth of research in autonomous vehicle control strategies extends beyond the aforementioned techniques. Interactive motion planning [29] enables real-time interactions between the autonomous vehicle and its environment, while robust MPC [30] addresses the challenges of high-speed overtaking maneuvers. Additionally, comprehensive surveys of control techniques [31] provide valuable insights into the diverse landscape of autonomous vehicle control approaches. Experiments and system implementations play a crucial role in validating these theoretical approaches. Xu et al. [32–35] provided valuable insights into the practical aspects of motion planning, control, and the integration of perception, planning, and control systems in autonomous vehicles. These practical endeavors bridge the gap between theoretical advancements and real-world applications. One notable effort in the domain of autonomous vehicle control is the study by Khosravian et al. [36], which investigates the integration of multi-stage MPC with quantized Convolutional Neural Networks (CNNs) within a Hardware-in-the-Loop (HIL) framework. This approach aims to optimize computational load and enhance the real-time performance of MPC algorithms on embedded systems, a critical consideration for resource-constrained autonomous vehicles. By leveraging quantized CNNs, the study demonstrates significant improvements in computational efficiency, thereby making it feasible to deploy sophisticated control strategies on memory-constrained hardware platforms.
This work differentiates itself from prior research by leveraging OpenStreetMap (OSM) data for real-world road modeling in autonomous vehicle simulations. This approach offers significant advantages for developing robust autonomous driving systems that can handle diverse traffic scenarios. The simulation environment can be tailored to include various complexities, such as major and minor intersections, slow-moving or parked vehicles, and unexpected road events. Furthermore, the methodology incorporates the behavior of all road users, including emergency braking, lane changes, and obstacles, leading to a more comprehensive and realistic testing environment. This enables the simulation and validation of a wider range of scenarios, ultimately promoting the development of safer and more reliable autonomous vehicles.
2 Description of the Research Methodology
The ACC system is a driver-assistance technology that dynamically adjusts a vehicle’s speed based on prevailing road conditions. Onboard sensors are utilized to detect the preceding target vehicle. The system must accurately identify the target amongst multiple vehicles ahead and calculate a safe distance, defined by Eq. (1):
If the actual distance measured by sensors is greater than or equal to the safe distance calculated by Eq. (1), the vehicle accelerates to the pre-set speed and maintains it until the condition in Eq. (2) is met, switching the vehicle control to speed mode:
Conversely, if the relative distance is less than the safe distance calculated by the controller as in Eq. (3), the vehicle decelerates to maintain a safe distance, switching the control to distance mode:
Here,
The formula for computing a safe path in Lane Change Maneuver (LCM) is as follows: Unsafe target:
Safe target:
Here, TTC stands for Time to Collision. Depending on the target vehicle’s position on the lane, two control methods can be distinguished.
This study employs MPC [1] as the control strategy for autonomous vehicle driving. MPC is a novel approach that leverages mathematical models for prediction and decision-making control. Unlike traditional Proportional-Integral-Derivative (PID) control methods, MPC can handle non-linear, time-varying, and multi-variable systems while considering constraints and optimization objectives. The control process of MPC, as illustrated in Fig. 1, is particularly well-suited for autonomous driving applications. Due to its ability to perform long-term optimization based on predictive models, MPC can account for dynamic vehicle characteristics, traffic constraints, and varying road conditions, resulting in more precise and safer control. In autonomous vehicles, MPC plays a crucial role in various aspects, including route planning, speed control, and vehicle stability control, contributing significantly to the advancement of autonomous driving technology.
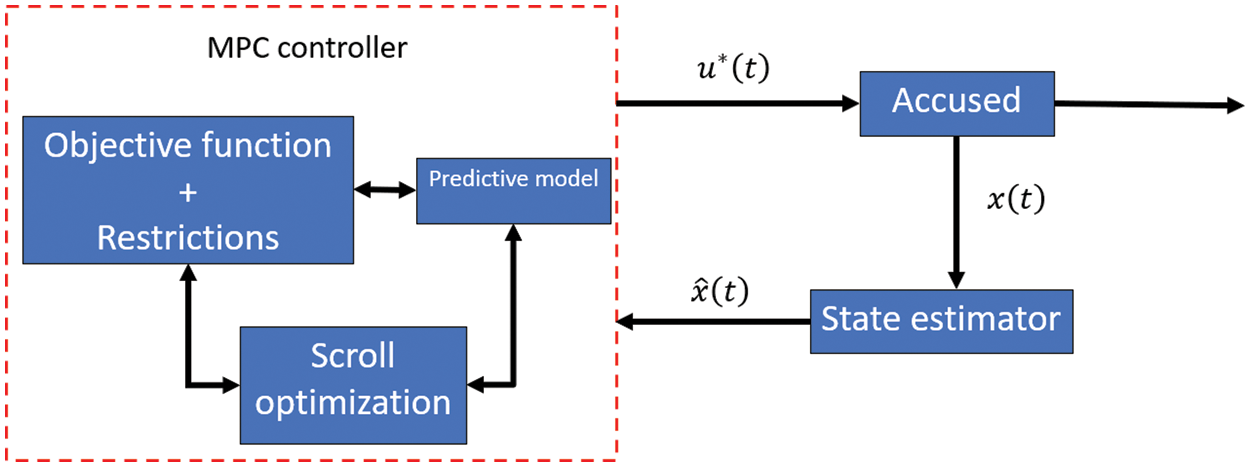
Figure 1: Block diagram of model predictive control principles
Model Predictive Control (MPC) is an advanced control strategy that leverages existing system models, the current system state, and anticipated future control inputs to predict the system’s future behavior. This enables MPC to handle systems with multiple variables and constrained control inputs. Additionally, MPC can simulate various scenarios under uncertain conditions, providing robustness. By employing a rolling horizon approach, MPC optimizes control actions over a finite time window to achieve desired control objectives. The core features of MPC control include [1,4,5,7–12]:
1. Predictive Model: The cornerstone of MPC is a mathematical model that utilizes past system information and control inputs to predict future system outputs. This model plays a crucial role in enabling MPC to anticipate the system’s response to various control strategies.
2. Rolling Horizon Optimization: MPC optimizes the control problem over a defined time window, referred to as the rolling horizon. Within this window, the controller focuses on optimizing a specific performance metric, such as minimizing tracking error or fuel consumption, to determine the optimal control sequence for the near future. After implementing the first control input from the sequence, the horizon is rolled forward, incorporating new system state information for the next optimization cycle.
3. Feedback Correction: MPC incorporates a closed-loop feedback mechanism. The actual system outputs are continuously fed back and compared with the predicted outputs. This feedback allows the controller to make real-time adjustments to the control sequence, accounting for any modeling uncertainties or unexpected disturbances.
This section details the research methodology employed to investigate safe route planning for autonomous vehicles through a combination of Lane Change Maneuver (LCM) and Adaptive Cruise Control (ACC). The methodology encompasses the research flowchart, experimental equipment, software tools, simulation scenario construction, and parameter settings within the simulation environment. These details are elaborated upon in the following subsections. Fig. 2 presents the system flowchart that outlines the research approach. The process commences with data acquisition using various onboard sensors, such as LiDAR, cameras, and ultrasonic radars. These sensors provide crucial information for signal analysis, object identification, and tracking. Subsequently, the system extracts the position and speed of surrounding objects to facilitate safe path planning and control for the autonomous vehicle.
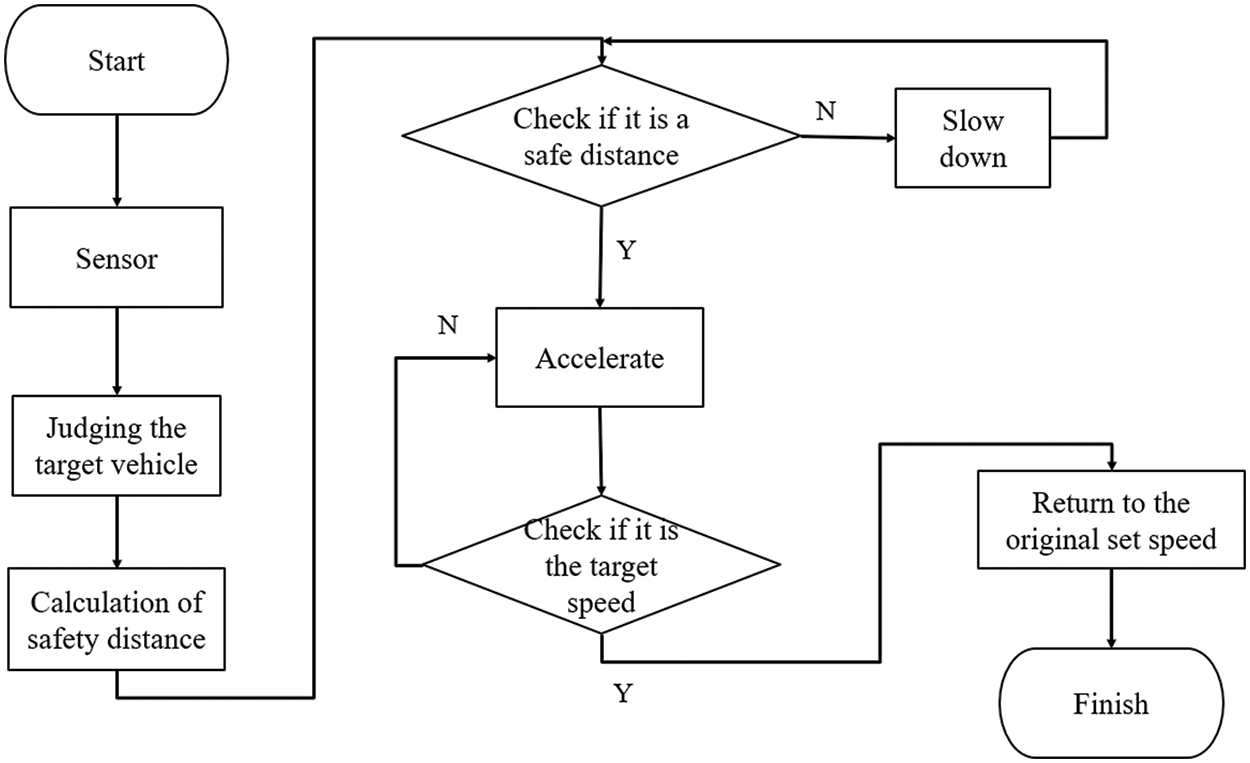
Figure 2: Research process diagram
The acquired sensor data is processed to determine the distance to the preceding vehicle and assess if it falls within the pre-defined safe operating range. If the distance is safe, the vehicle accelerates; otherwise, it decelerates to maintain the desired speed. The simulation scenarios are constructed within a dedicated simulation software. Two primary methods exist for scenario generation: command-based and graphical user interface (GUI). This research leverages the GUI approach offered by the Driving Scenario Designer software for scenario planning. The simulation process involves utilizing OpenStreetMap to select a specific road segment for the simulation, as illustrated in Fig. 3. The chosen area is a highway segment with curves, allowing for the evaluation of the MPC controller’s performance in managing both lateral and longitudinal vehicle movements during cruise control and automatic lane change maneuvers. Once the desired area is identified, it is exported from OpenStreetMap as a .OSM file. Subsequently, the .OSM file is imported into the Driving Scenario Designer software, and the specific road segment for testing is selected.
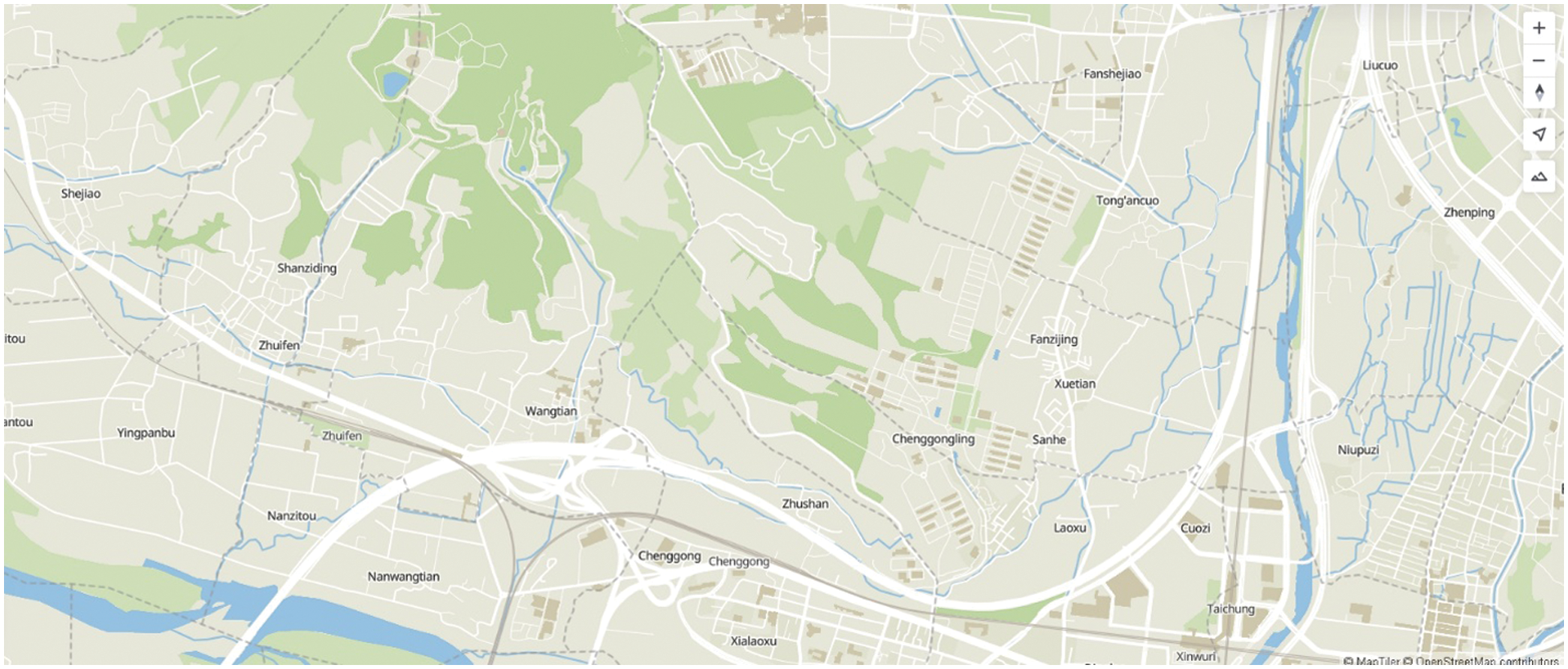
Figure 3: Depicts the selection of roads in the Taichung area of Taiwan using OpenStreetMap
The rationale behind selecting a highway segment with curves for the simulation is to assess the MPC controller’s ability to handle more complex driving scenarios that involve both lateral and longitudinal control. This evaluation is crucial for ensuring the controller’s robustness and effectiveness in real-world driving conditions. The subsequent subsections will delve into the specific details regarding the experimental equipment employed in the research, along with a comprehensive discussion on the various parameters configured within the simulation environment. These parameters include vehicle mass, sensor placement locations, and controller tuning parameters.
This study leverages a simulation environment to investigate the proposed control algorithms. Various vehicle and environmental parameters are incorporated into the simulation model to achieve realistic behavior. These parameters are detailed below:
Vehicle Parameters:
• Road Geometry: The simulated road is a two-way, six-lane configuration with each lane measuring 3.6 m in width.
• Vehicle Model: A sedan-type vehicle is employed within the simulation. The vehicle dimensions are: length 4.625 m, width 1.825 m, and height 1.62 m. Both the front and rear axles utilize a double-wheel configuration.
• Mass and Inertia: The vehicle mass is set to 1600 kg. The center of gravity (CG) location relative to the front and rear axles is 1.2 m and 1.6 m, respectively. The distance from the chassis to the ground is 0.35 m. The rotational inertia of the vehicle is 2875 kg/m2.
Initial Conditions:
• Longitudinal Dynamics: The initial longitudinal position of the vehicle is set to 9.7328 m, and the initial longitudinal speed is 28 m per second.
• Lateral Dynamics: The initial lateral position of the vehicle is set to 757.5769 m, and the initial lateral speed is 0 m per second.
• Rotational Dynamics: The initial yaw angle of the vehicle is set to 0.0246 radians, and the initial yaw rate is 0 radians per second.
Environmental Parameters:
• Atmospheric Conditions: The absolute pressure within the simulation environment is set to 101325 Pascals, representing standard atmospheric pressure. The air temperature is set to 273 Kelvin (0 degrees Celsius).
• Gravity: The acceleration due to gravity within the simulation environment is set to the standard value of 9.81 m per second squared.
This research utilizes a suite of onboard sensors to provide the perception system with critical environmental information. The sensor configuration incorporates both cameras and millimeter-wave (mmWave) radars, offering adjustable mounting positions and varying detection ranges. Details regarding the individual sensors are provided below:
1. Front-Facing Camera: A camera is mounted on the front windshield, providing a field of view of 43.6° and a maximum detection range of 150 m. This camera is primarily used for lane marking detection.
2. Long-Range mmWave Radar: A long-range mmWave radar is positioned at the front of the vehicle, offering a field of view of 20° and a maximum detection range of 170 m. This sensor plays a crucial role in detecting preceding vehicles.
3. Short-Range mmWave Radars: Two short-range mmWave radars are installed on the center of the vehicle’s roof, each with a field of view of 140° and a maximum detection range of 30 m. These sensors are employed to detect objects in the vehicle’s blind spots on both sides.
4. Medium-Range Front Bumper Radar: A medium-range mmWave radar is mounted on the front bumper, providing a field of view of 90° and a maximum detection range of 80 m. This sensor is used for additional detection of vehicles in the forward direction.
5. Rear Bumper Radars: Two additional medium-range mmWave radars are installed on the rear bumpers, one on each side. Each radar offers a field of view of 30° and a maximum detection range of 70 m. These sensors are primarily used for detecting vehicles approaching from behind.
The adjustable mounting positions of these sensors allow for optimization of the overall perception system’s field of view, ensuring comprehensive environmental awareness for the autonomous vehicle.
This research prioritizes the real-time response capability of the Model MPC controller, particularly within the context of path planning for autonomous vehicles. To achieve this, the MPC controller leverages a predictive model to forecast future system states and optimize control actions over a rolling horizon. This approach enables the system to adapt rapidly to dynamic environmental changes. The specific controller parameters employed in this study are presented in Table 1.

By limiting the optimization iterations to a maximum of 8, the controller can produce control actions within a suitable time frame for real-time implementation.
Regarding detection latency and response times, our system integrates data from onboard sensors, including optical LiDAR, vehicular cameras, and millimeter-wave radar. These sensors provide real-time information about the vehicle’s surroundings, which is crucial for the MPC to make accurate predictions and adjustments. The latency of the detection system and the response times of the MPC controller were tested in our simulations. The detection latency of the millimeter-wave radar and optical LiDAR is approximately 20 milliseconds, and the MPC controller processes this data within 50 milliseconds, resulting in an overall response time of around 70 milliseconds. A simulation environment was developed to model a section of National Highway No. 1 between Nantun and Wuri. This environment integrates a Model Predictive Control (MPC) controller for vehicle path planning, replicating highway driving scenarios. Onboard vehicle sensors, including cameras and millimeter-wave radar, were simulated to capture dynamic changes in the surrounding environment. This facilitated the implementation of functionalities like Lane Change Maneuver (LCM) and Adaptive Cruise Control (ACC). The simulation results demonstrate the capability of vehicles to navigate the simulated highway segment while maintaining safe distances from preceding vehicles and accurately identifying primary targets.
Fig. 4 presents an aerial and third-person view of the simulated vehicle on the highway. Vehicle camera and radar detections of preceding vehicles are also shown, enabling analysis of obstacle detection and trajectory planning based on sensor data. The figure further illustrates the generated trajectories for vehicles on the road. For the test vehicle, four potential paths are displayed:
1. Optimal Trajectory: Identified by the MPC controller after iterative optimization.
2. Unsafe Path: Potential collisions with surrounding vehicles or obstacles.
3. Non-Viable Path: Proximity to other vehicles or a collision time violating the safety threshold.
4. Unevaluated Path: Navigable but not currently considered optimal.
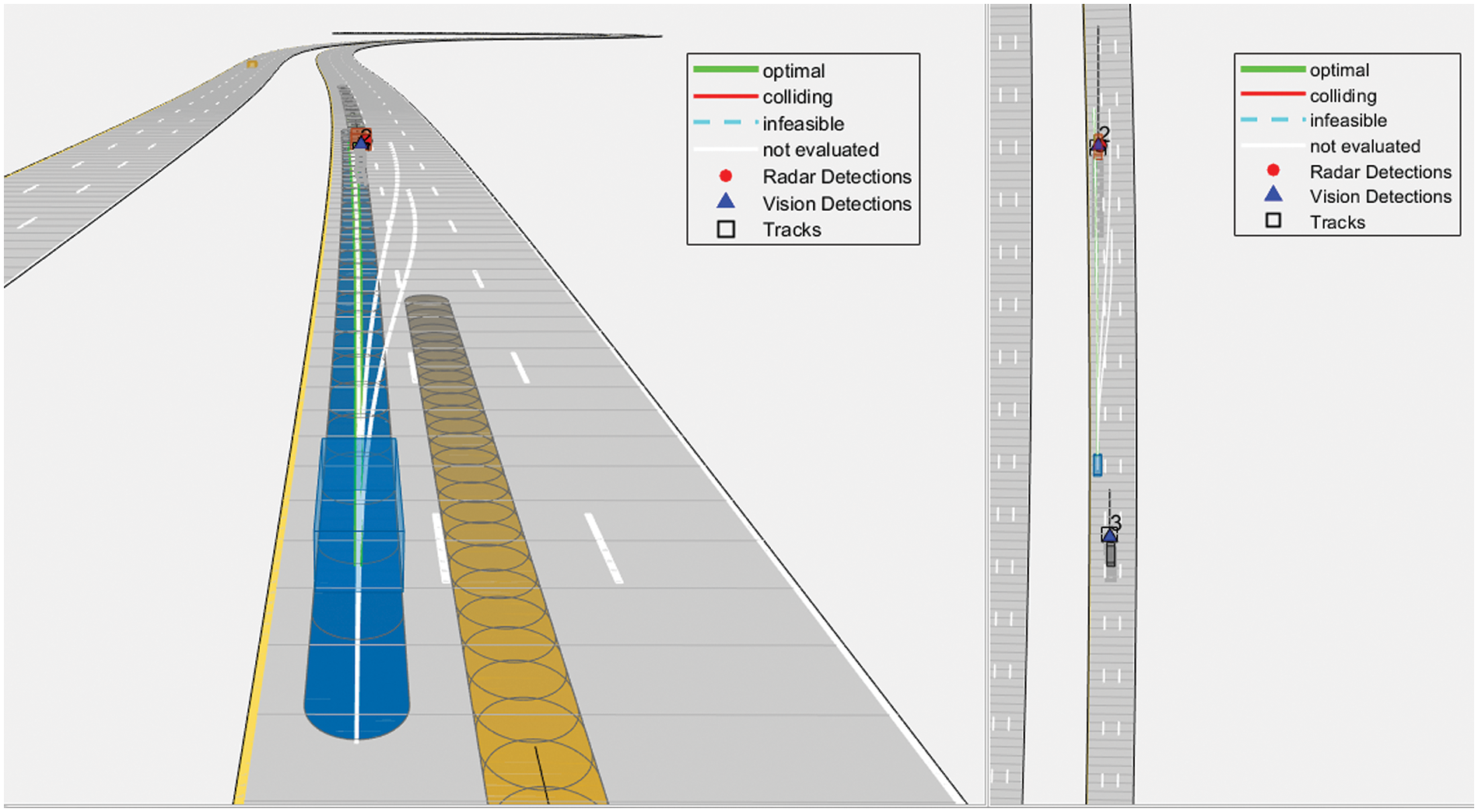
Figure 4: Simulated scenario of vehicle driving on a highway
The simulation utilizes various perspectives to observe vehicle movement and employs system analysis and judgment to determine safe and efficient driving paths. At the simulation start, the vehicle occupies the middle lane. As shown in Fig. 5, sensors detect three vehicles ahead (blue for camera, red for radar). Due to the significant distance, lane changing is deemed unnecessary, and the vehicle maintains its speed. While vehicles are present in adjacent lanes, they are far enough away that the system deems lane changing possible but not optimal.
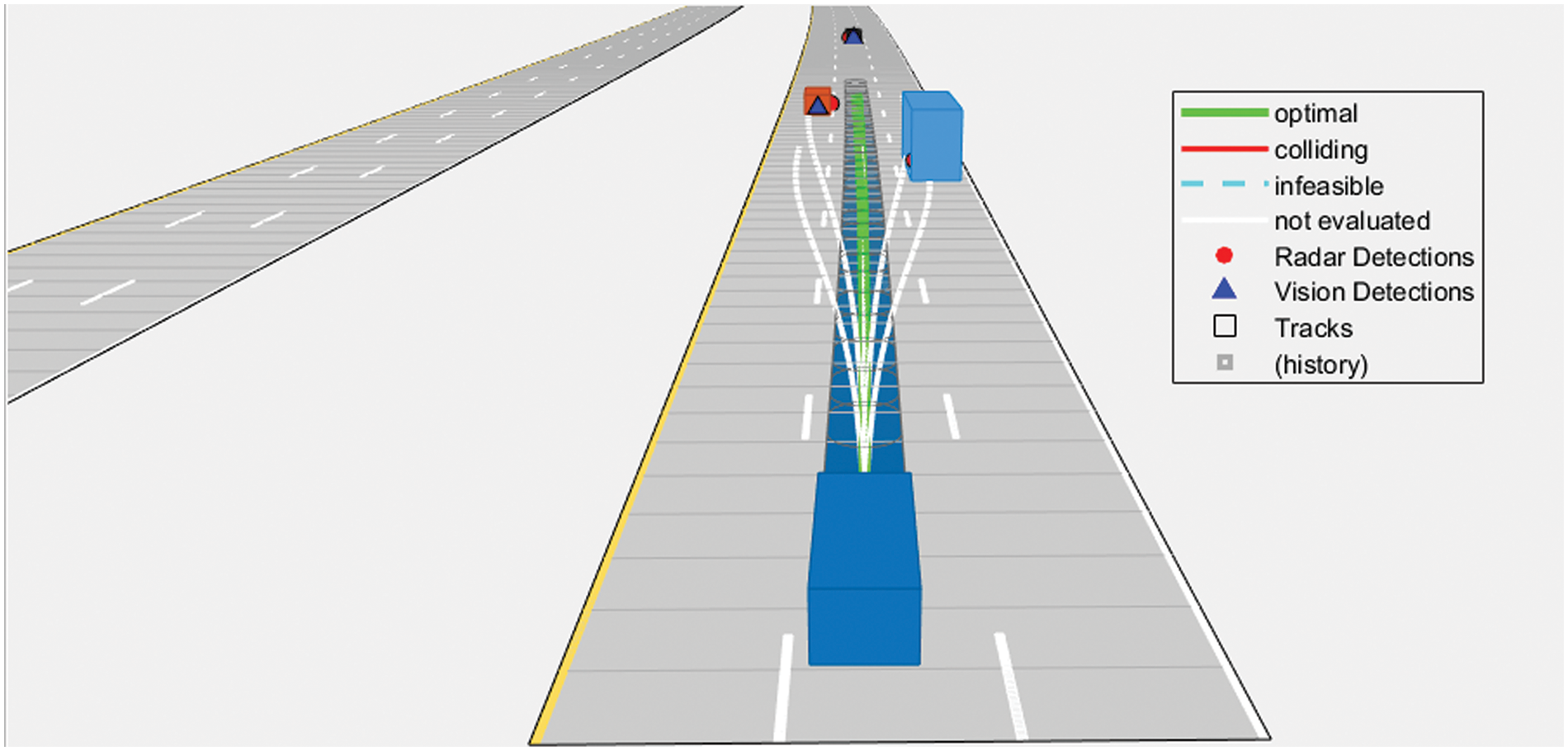
Figure 5: Vehicle beginning to drive
As the simulation progresses, sensors detect slower-moving vehicles ahead in the middle lane, while vehicles in the inner lane are traveling faster at a safe distance. This makes the inner lane the most desirable path at this point. The system calculates the relative speed of the preceding vehicle and determines that maintaining the current speed in the middle lane poses a collision risk. To mitigate this, the system evaluates the distance between vehicles in the inner lane and the test vehicle to ensure a safe gap. Subsequently, the system designates the inner lane as the optimal path and marks the original path as non-viable. This triggers a lane change maneuver, as depicted in Figs. 6 and 7.
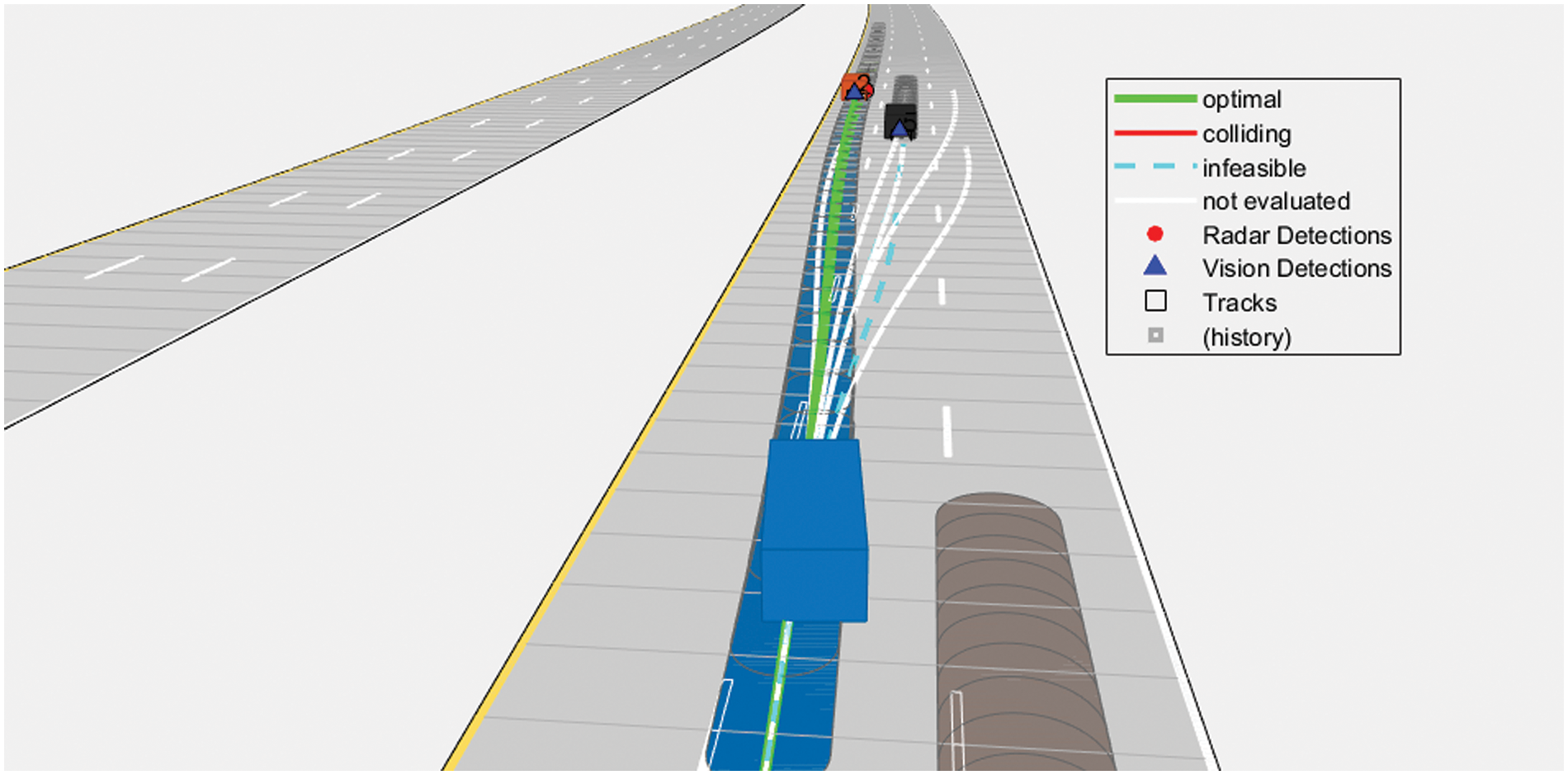
Figure 6: Vehicle initiating lane change
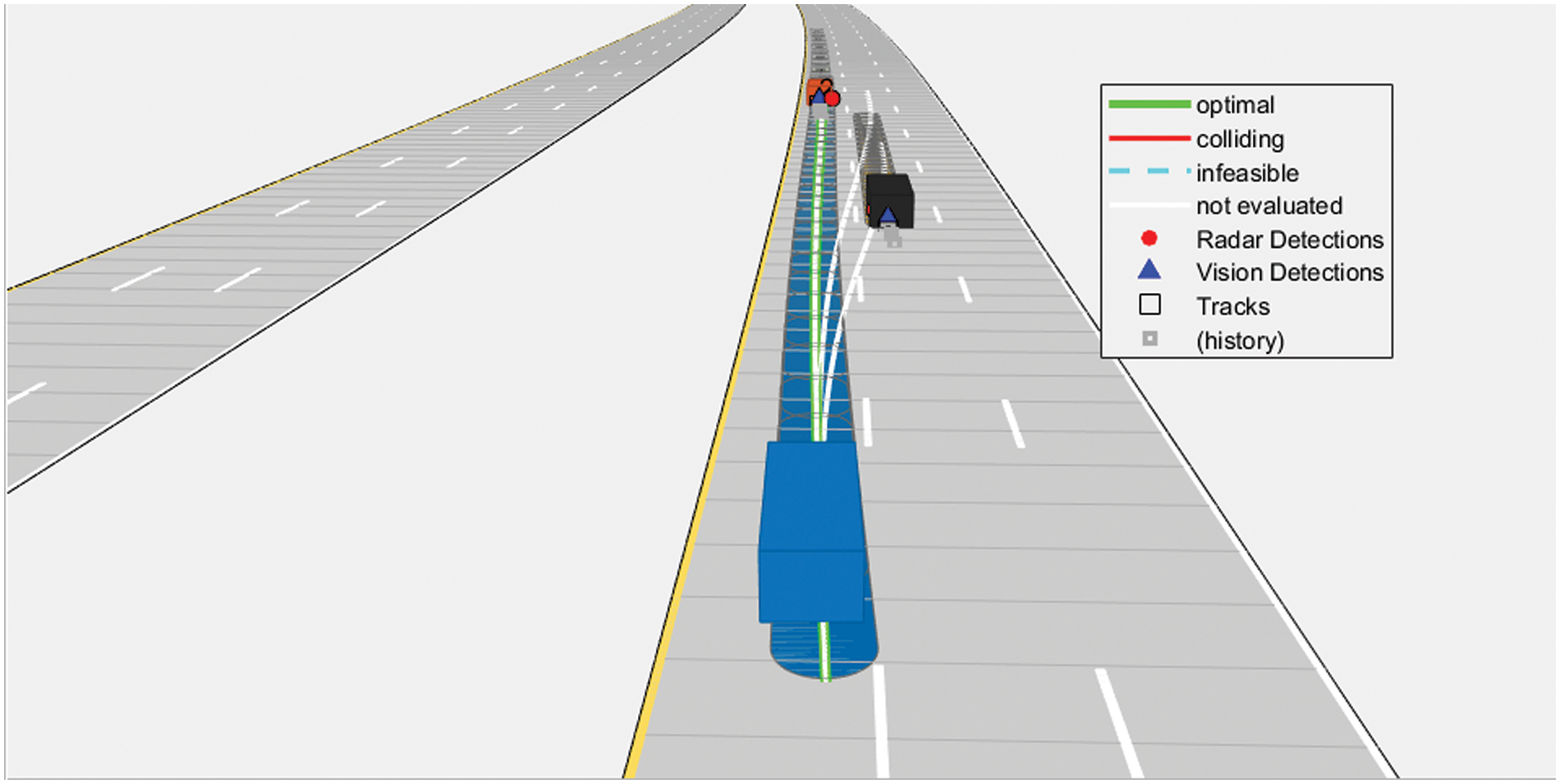
Figure 7: Vehicle completing lane change
Following the lane change maneuver, the onboard sensors detected two vehicles ahead. The vehicle in the middle lane posed a potential collision risk within the predefined safety time due to insufficient distance for safe lane changing. Consequently, the system reverted to the original path as the optimal choice. The ACC functionality employed the primary target vehicle identification (orange car) to monitor relative speeds of preceding vehicles. This allows the system to determine the necessity of deceleration to maintain a safe following distance, as illustrated in Fig. 8.

Figure 8: Unsafe path identification
Simulation data generated by Simulink was exported to MATLAB for post-processing and visualization. Key parameters such as vehicle trajectory, speed, angular velocity, acceleration, and following distance were analyzed. Figs. 9 through 14 depict these parameters graphically. The simulation spanned 31.5 s and investigated vehicle dynamics on a highway segment. Fig. 9 shows the vehicle’s trajectory within the environment. Figs. 10 and 11 illustrate the lateral (steering) and longitudinal (forward) velocities, respectively. The red dashed line in Fig. 10 represents the target speed set by the ACC system. During lane changes and cornering, as shown in Fig. 11, lateral forces temporarily reduced the speed, as illustrated in Fig. 12. However, the system accelerated to regain the target speed upon identifying safe travel conditions. Fig. 13 depicts the following distance maintained from the preceding vehicle, with the red dashed line indicating the minimum safety threshold set by the MPC controller. This visualization confirms the system’s ability to maintain a safe following distance. Initially, the vehicle traveled in the center lane but needed to change lanes due to a decreasing following distance, as shown in Fig. 13. The MPC controller identified the inner lane as the optimal path, as depicted in Fig. 14, prompting a Lane Change Maneuver (LCM) to avoid a collision. Consequently, the target vehicle became the one ahead in the inner lane, resulting in a safe following distance. At 11 s, the initial target vehicle moved away, leaving a clear lane ahead, as shown in Fig. 13. The system deemed the distance sufficient and maintained the current lane. ACC mode was then engaged to increase speed towards the preset maximum. In ACC mode, the system continuously monitored the relative speed of preceding vehicles and adjusted speed accordingly to maintain a safe following distance and comply with changing road conditions. By 30.1 s, the vehicle returned to the inner lane after initially changing to the center lane. Sensors detected a vehicle ahead with a safe following distance (approximately 70 m). No deceleration or lane change was necessary, allowing continuous travel in the inner lane. However, cornering maneuvers caused a temporary decrease in speed due to lateral forces. The system then increased acceleration to return to the target speed, as illustrated in Fig. 12.
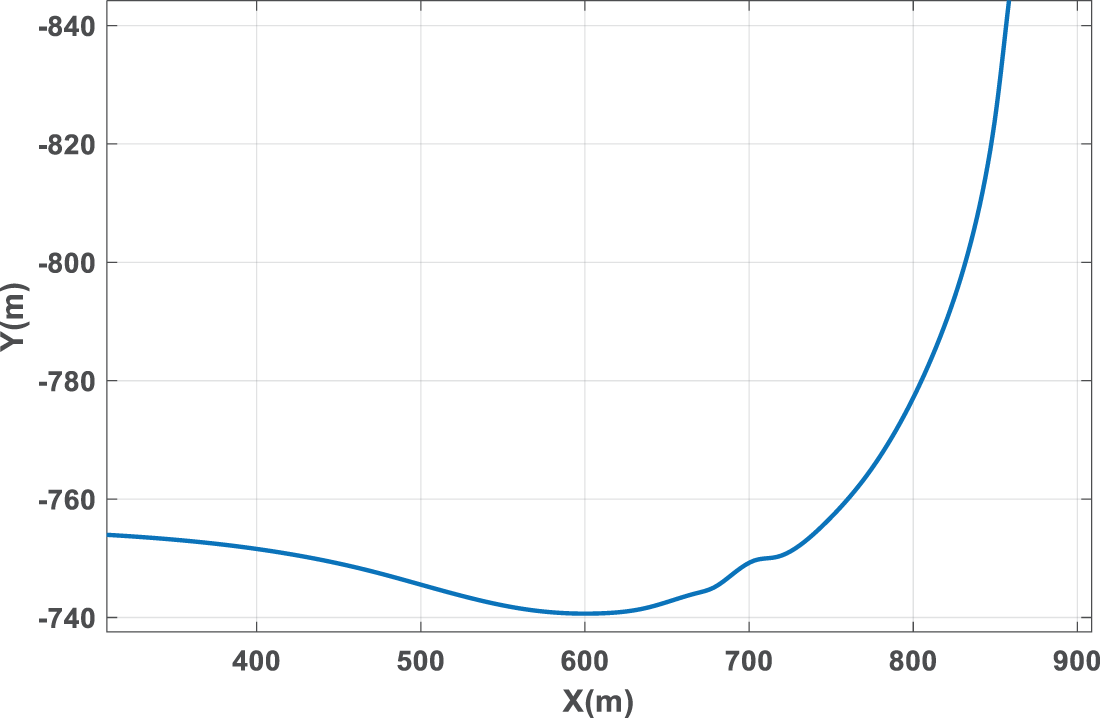
Figure 9: Vehicle’s driving path
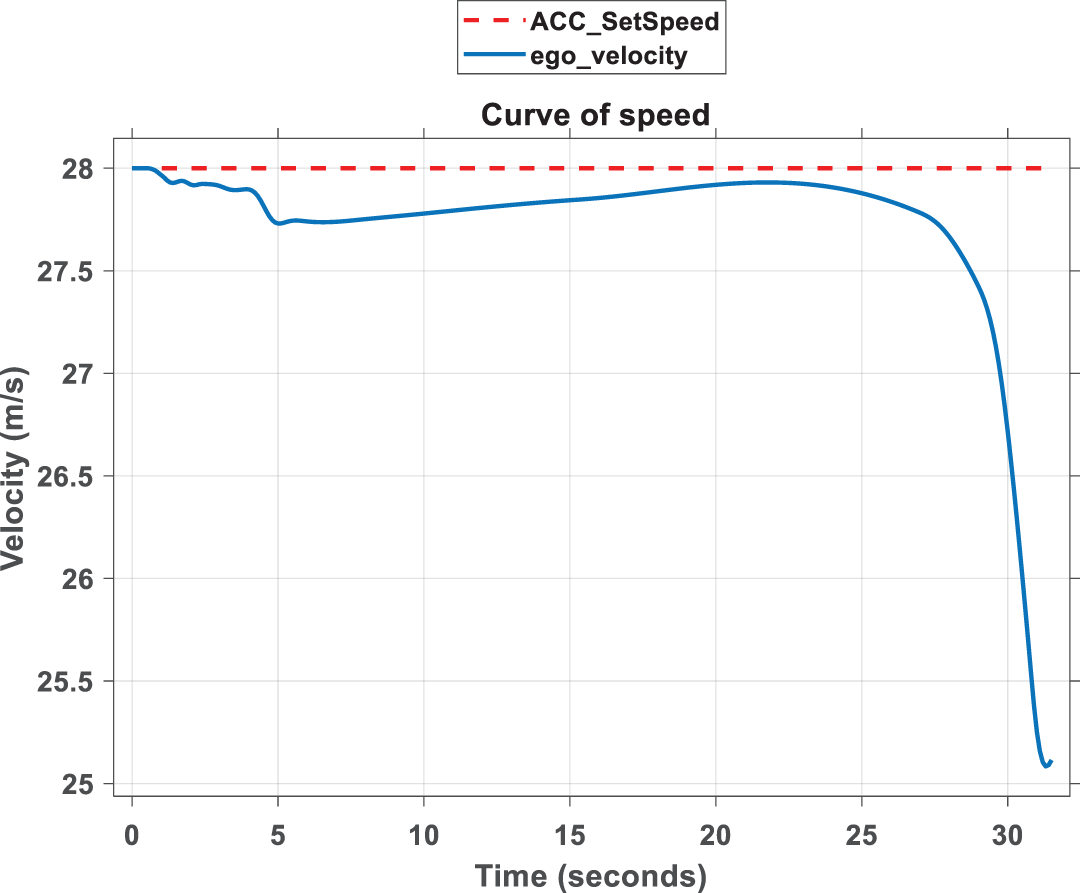
Figure 10: Vehicle speed
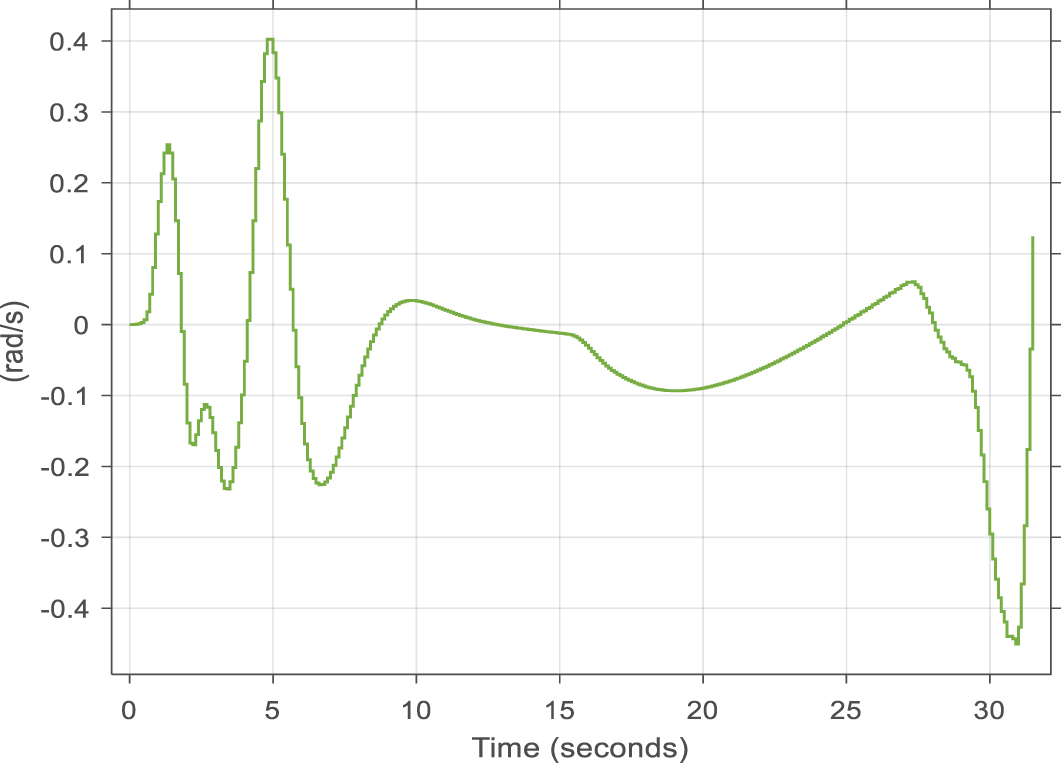
Figure 11: Vehicle angular velocity
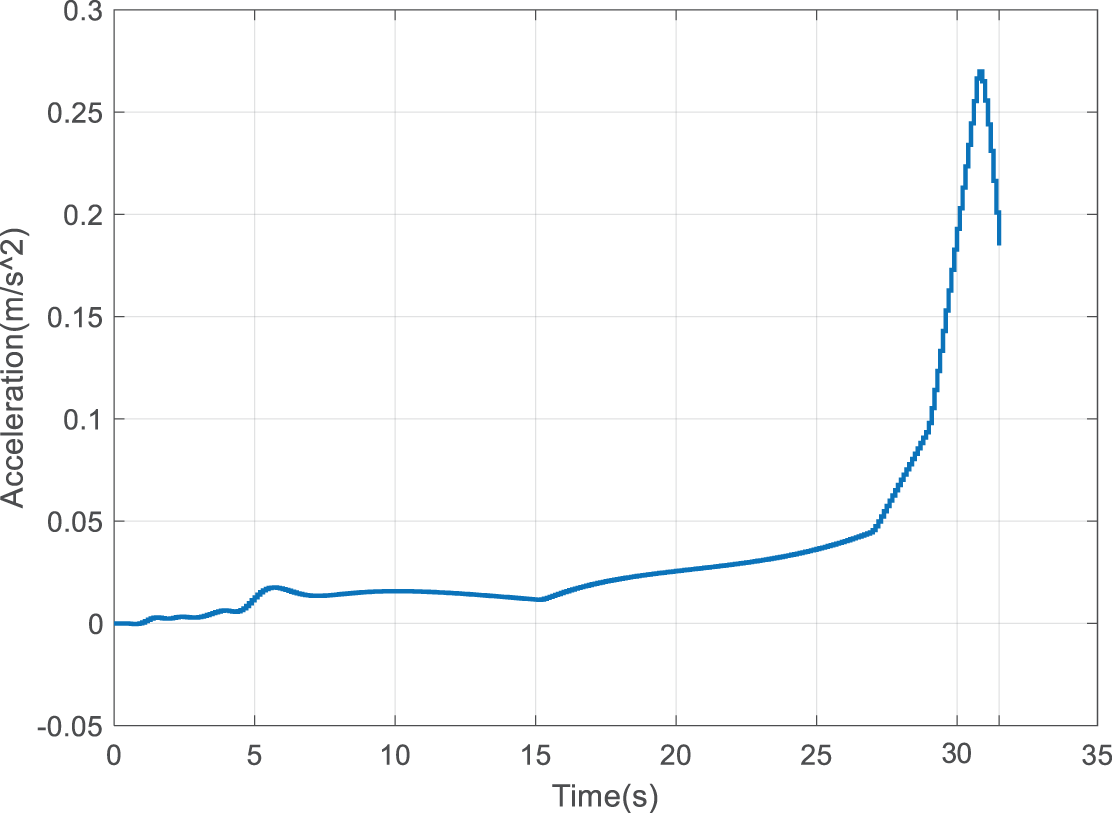
Figure 12: Vehicle acceleration

Figure 13: Detection of safe distance from the vehicle ahead
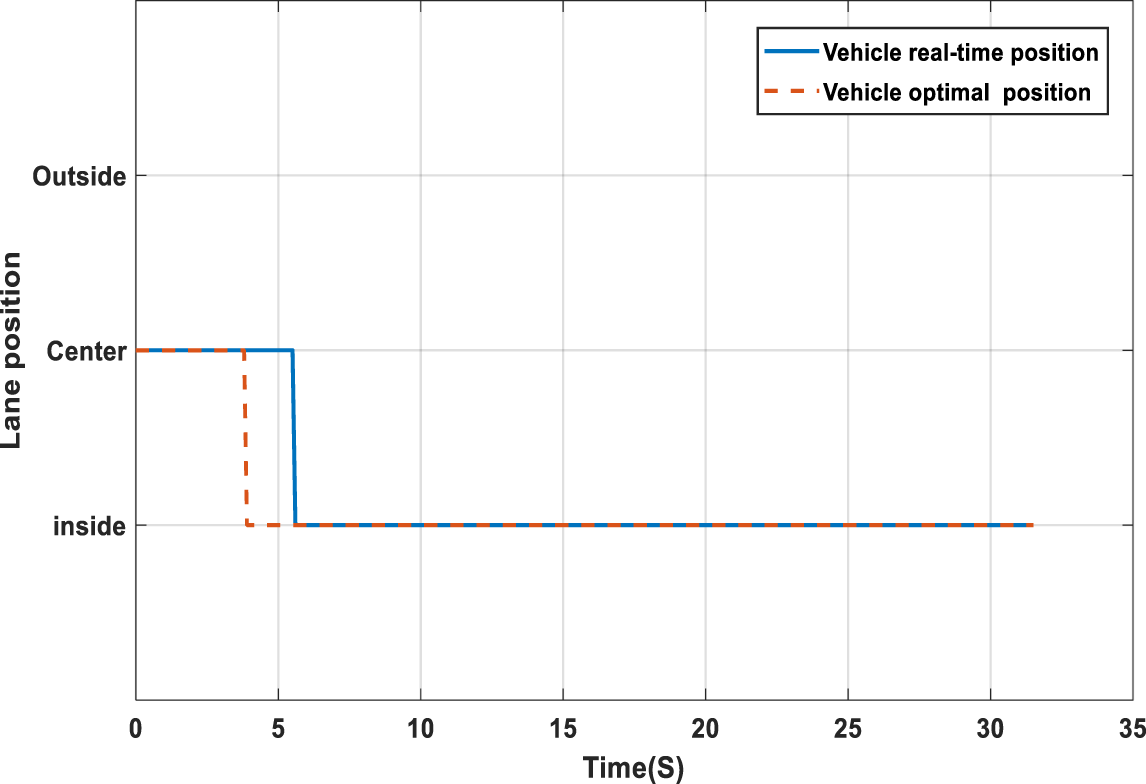
Figure 14: Diagram of vehicle’s lane position
This study evaluated MPC performance in highway driving scenarios on National Freeway No. 1 in Taiwan. Compared to traditional methods, MPC demonstrated superior safety and efficiency. Collision avoidance, lane change maneuvers, and ACC were effectively handled by MPC, enhancing road safety. Additionally, MPC optimized vehicle speed and path, resulting in improved fuel efficiency and reduced travel time. Traffic flow was also enhanced through intelligent lane change and speed decisions. These findings highlight MPC’s potential for real-world autonomous driving applications.
While this study provides valuable insights into the application of MPC in autonomous vehicle navigation, it acknowledges the inherent limitations of simulations. To enhance the robustness and applicability of the findings, future research should include real-world testing under various weather conditions, traffic densities, and road types to validate MPC performance. Introducing more variability in simulations by modeling unpredictable human behaviors and adverse weather conditions will help bridge the gap between simulations and real-world scenarios. Additionally, testing hardware reliability by simulating sensor malfunctions and communication breakdowns, along with incorporating redundancy and fault-tolerant mechanisms, is crucial. Collaborating with automotive industry partners for advanced simulation tools and testing facilities will further ensure realistic and comprehensive evaluations.
While this study demonstrates the effectiveness of MPC for highway navigation, future research should encompass testing in diverse environments, including urban streets, rural roads, and complex intersections. Real-world validation under these varied conditions is crucial to confirm the MPC’s generalizability and applicability in practical driving scenarios. By addressing these limitations, we can ensure the MPC approach is robust and adaptable to the complexities of real-world driving situations, paving the way for more reliable and generalizable autonomous vehicle navigation systems.
Further investigations should focus on the critical importance of sensor reliability in real-world applications. Future research should enhance the robustness of the MPC approach by testing sensor reliability through simulations of potential failures, malfunctions, and interferences, and developing redundancy and fault-tolerant systems. Additionally, formulating emergency response plans for sensor failures, investigating advanced sensor fusion techniques to improve overall system reliability, and conducting real-world testing under diverse conditions will validate both the MPC approach and the sensor systems.
Future research should address the computational requirements for real-time implementation of the MPC approach in autonomous vehicles. This includes optimizing MPC algorithms to reduce computational load, utilizing high-performance embedded systems like NVIDIA Jetson platforms, and employing software optimization techniques. Additionally, leveraging parallel processing capabilities and conducting thorough benchmarking under various scenarios are crucial to validate computational performance. By focusing on these strategies, future studies can ensure both the theoretical effectiveness and practical feasibility of MPC implementations in real-time autonomous vehicle navigation systems.
Assessing the MPC system’s adaptability to different environmental conditions, including rain, snow, fog, and night driving, is also essential. This involves conducting real-world testing and simulations under these conditions to evaluate the system’s robustness and performance. Integrating advanced sensor fusion techniques can further enhance the system’s ability to handle adverse weather and low-visibility scenarios. Addressing these aspects will ensure the MPC system’s reliability and effectiveness in a wide range of driving environments.
This study investigated the application of Model Predictive Control (MPC) for Automated Lane Change (LCM) and Adaptive Cruise Control (ACC) within a simulated highway environment. Leveraging sensor data, the system dynamically determined safe following distances and optimal trajectories for lane changes. The results demonstrate the effectiveness of MPC in achieving safe lane changes while avoiding collisions and accurately tracking preceding vehicles. These findings can be integrated into existing driver-assistance systems and future autonomous vehicles. Furthermore, the real-map data employed in this simulation paves the way for further testing in diverse map scenarios, facilitating the validation and improvement of the control system. Continuous research and development based on this approach hold promise for advancing the level of autonomy in self-driving vehicles, ultimately leading to safer and more efficient autonomous driving systems.
Acknowledgement: Not applicable.
Funding Statement: The authors would like to thank the National Science and Technology Council, Taiwan, for financially supporting this research (Grant No. NSTC 113-2221-E-018-011) and Ministry of Education’s Teaching Practice Research Program, Taiwan (PSK1120797 and PSK1134099).
Author Contributions: Conceptualization, Shih-Lin Lin; Formal analysis, Bo-Chen Lin; Funding acquisition, Shih-Lin Lin; Investigation, Shih-Lin Lin; Methodology, Shih-Lin Lin; Project administration, Shih-Lin Lin; Resources, Shih-Lin Lin; Software, Bo-Chen Lin; Supervision, Shih-Lin Lin; Validation, Shih-Lin Lin; Visualization, Bo-Chen Lin; Writing—original draft, Bo-Chen Lin; Writing—review & editing, Shih-Lin Lin. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. Scokaert, “Constrained model predictive control: Stability and optimality,” Automatica, vol. 36, no. 6, pp. 789–814, Jun. 2000. doi: 10.1016/S0005-1098(99)00214-9. [Google Scholar] [CrossRef]
2. S. S. Keerthi and E. G. Gilbert, “Optimal infinite-horizon feedback laws for a general class of constrained discrete-time systems: Stability and moving-horizon approximations,” J. Optim. Theory Appl., vol. 57, no. 3, pp. 265–293, Mar. 1988. doi: 10.1007/BF00938540. [Google Scholar] [CrossRef]
3. R. Marino, S. Scalzi, G. Orlando, and M. Netto, “A nested PID steering control for lane keeping in vision-based autonomous vehicles,” presented at the 2009 Am. Control Conf., St. Louis, MO, USA, Jun. 10–12, 2009, pp. 2885–2890. [Google Scholar]
4. D. Chu, H. Li, C. Zhao, and T. Zhou, “Trajectory tracking of autonomous vehicle based on model predictive control with PID feedback,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 2, pp. 2239–2250, Feb. 2022. doi: 10.1109/TITS.2022.3150365. [Google Scholar] [CrossRef]
5. K. Wang, Y. Wang, L. Wang, H. Du, and K. Nam, “Distributed intersection conflict resolution for multiple vehicles considering longitudinal-lateral dynamics,” IEEE Trans. Veh. Technol., vol. 70, no. 5, pp. 4166–4177, May 2021. doi: 10.1109/TVT.2021.3072629. [Google Scholar] [CrossRef]
6. J. Ji, A. Khajepour, W. W. Melek, and Y. Huang, “Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints,” IEEE Trans. Veh. Technol., vol. 66, no. 2, pp. 952–964, Feb. 2016. doi: 10.1109/TVT.2016.2555853. [Google Scholar] [CrossRef]
7. S. Chen and H. Chen, “MPC-based path tracking with PID speed control for autonomous vehicles,” IOP Conf. Ser.: Mater. Sci. Eng., vol. 892, no. 1, 2020, Art. no. 012034. doi: 10.1088/1757-899X/892/1/012034. [Google Scholar] [CrossRef]
8. Z. Zuo et al., “MPC-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles,” IEEE Trans. Intell. Veh., vol. 6, no. 3, pp. 513–522, Sep. 2020. [Google Scholar]
9. Y. Lu, J. Zhu, Z. Wang, N. Du, and J. Zhang, “Path preview tracking for autonomous vehicles based on model predictive control,” presented at the 2022 IEEE Int. Conf. Unmanned Syst. (ICUS), Guangzhou, China, Oct. 28–30, 2022, pp. 405–410. [Google Scholar]
10. S. Mata, A. Zubizarreta, and C. Pinto, “Robust tube-based model predictive control for lateral path tracking,” IEEE Trans. Intell. Veh., vol. 4, no. 4, pp. 569–577, Dec. 2019. doi: 10.1109/TIV.2019.2938102. [Google Scholar] [CrossRef]
11. J. Jiang and A. Astolfi, “Lateral control of an autonomous vehicle,” IEEE Trans. Intell. Veh., vol. 3, no. 2, pp. 228–237, Jun. 2018. doi: 10.1109/TIV.2018.2804173. [Google Scholar] [CrossRef]
12. J. Yang, D. Chu, J. Yin, D. Pi, J. Wang and L. Lu, “Distributed model predictive control for heterogeneous platoon with leading human-driven vehicle acceleration prediction,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 5, pp. 3944–3959, May 2024. doi: 10.1109/TITS.2023.3330941. [Google Scholar] [CrossRef]
13. C. Liu, S. Lee, S. Varnhagen, and H. E. Tseng, “Path planning for autonomous vehicles using model predictive control,” presented at the 2017 IEEE Intell. Veh. Symp. (IV), Los Angeles, CA, USA, Jun. 11–14, 2017, pp. 174–179. [Google Scholar]
14. R. Attia, R. Orjuela, and M. Basset, “Combined longitudinal and lateral control for automated vehicle guidance,” Veh. Syst. Dyn., vol. 52, no. 2, pp. 261–279, Feb. 2014. doi: 10.1080/00423114.2013.874563. [Google Scholar] [CrossRef]
15. R. C. Rafaila and G. Livint, “Nonlinear model predictive control of autonomous vehicle steering,” presented at the 2015 19th Int. Conf. Syst. Theory Control Comput. (ICSTCC), Cheile Gradistei, Romania, Oct. 14–16, 2015, pp. 466–471. [Google Scholar]
16. H. Febbo, P. Jayakumar, J. L. Stein, and T. Ersal, “Real-time trajectory planning for automated vehicle safety and performance in dynamic environments,” J. Autom. Veh. Syst., vol. 1, no. 4, 2021, Art. no. 041001. doi: 10.1115/1.4053243. [Google Scholar] [CrossRef]
17. R. Quirynen, K. Berntorp, K. Kambam, and S. Di Cairano, “Integrated obstacle detection and avoidance in motion planning and predictive control of autonomous vehicles,” presented at the 2020 Am. Control Conf. (ACC), Denver, CO, USA, Jul. 1–3, 2020, pp. 1203–1208. [Google Scholar]
18. A. Bulsara, A. Raman, S. Kamarajugadda, M. Schmid, and V. N. Krovi, “Obstacle avoidance using model predictive control: An implementation and validation study using scaled vehicles,” Warrendale, PA, USA, vol. 1, 2020. Tech. Rep. 2020-01-0109. doi: 10.4271/2020-01-0109. [Google Scholar] [CrossRef]
19. C. J. Ostafew, A. P. Schoellig, T. D. Barfoot, and J. Collier, “Learning-based nonlinear model predictive control to improve vision-based mobile robot path tracking,” J. Field Robot, vol. 33, no. 1, pp. 133–152, Jan. 2016. doi: 10.1002/rob.21587. [Google Scholar] [CrossRef]
20. J. Liu, P. Jayakumar, J. L. Overholt, J. L. Stein, and T. Ersal, “The role of model fidelity in model predictive control based hazard avoidance in unmanned ground vehicles using LIDAR sensors,” presented at the Dyn. Syst. Control Conf., Palo Alto, California, USA, Oct. 21–23, 2013, vol. 56147. [Google Scholar]
21. J. Liu, P. Jayakumar, J. L. Stein, and T. Ersal, “A nonlinear model predictive control formulation for obstacle avoidance in high-speed autonomous ground vehicles in unstructured environments,” Veh. Syst. Dyn., vol. 56, no. 6, pp. 853–882, Jun. 2018. doi: 10.1080/00423114.2017.1399209. [Google Scholar] [CrossRef]
22. J. Liu, P. Jayakumar, J. L. Stein, and T. Ersal, “A study on model fidelity for model predictive control-based obstacle avoidance in high-speed autonomous ground vehicles,” Veh. Syst. Dyn., vol. 54, no. 11, pp. 1629–1650, Nov. 2016. doi: 10.1080/00423114.2016.1223863. [Google Scholar] [CrossRef]
23. K. Zhang, J. Sprinkle, and R. G. Sanfelice, “Computationally aware control of autonomous vehicles: A hybrid model predictive control approach,” Auton Robots, vol. 39, no. 4, pp. 503–517, Jul. 2015. doi: 10.1007/s10514-015-9469-5. [Google Scholar] [CrossRef]
24. X. Du, K. K. K. Htet, and K. K. Tan, “Development of a genetic-algorithm-based nonlinear model predictive control scheme on velocity and steering of autonomous vehicles,” IEEE Trans. Ind. Electron., vol. 63, no. 11, pp. 6970–6977, Nov. 2016. doi: 10.1109/TIE.2016.2585079. [Google Scholar] [CrossRef]
25. V. K. Adajania, A. Sharma, A. Gupta, H. Masnavi, K. M. Krishna and A. K. Singh, “Multi-modal model predictive control through batch non-holonomic trajectory optimization: Application to highway driving,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 4220–4227, Apr. 2022. doi: 10.1109/LRA.2022.3148460. [Google Scholar] [CrossRef]
26. N. Ye, D. Wang, and Y. Dai, “Enhancing autonomous vehicle lateral control: A linear complementarity model-predictive control approach,” Appl. Sci., vol. 13, no. 19, Oct. 2023, Art. no. 10809. doi: 10.3390/app131910809. [Google Scholar] [CrossRef]
27. C. Toumieh and A. Lambert, “Decentralized multi-agent planning using model predictive control and time-aware safe corridors,” IEEE Robot. Autom. Lett., vol. 7, no. 4, pp. 11110–11117, Oct. 2022. doi: 10.1109/LRA.2022.3196777. [Google Scholar] [CrossRef]
28. V. K. Yanumula, P. Typaldos, D. Troullinos, M. Malekzadeh, I. Papamichail and M. Papageorgiou, “Optimal trajectory planning for connected and automated vehicles in lane-free traffic with vehicle nudging,” IEEE Trans. Intell. Veh., vol. 8, no. 3, pp. 2385–2399, Sep. 2023. doi: 10.1109/TIV.2023.3241200. [Google Scholar] [CrossRef]
29. Y. Chen, U. Rosolia, W. Ubellacker, N. Csomay-Shanklin, and A. D. Ames, “Interactive multi-modal motion planning with branch model predictive control,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 5365–5372, Apr. 2022. doi: 10.1109/LRA.2022.3156648. [Google Scholar] [CrossRef]
30. S. Dixit et al., “Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 6, pp. 2310–2323, Jun. 2019. doi: 10.1109/TITS.2019.2916354. [Google Scholar] [CrossRef]
31. W. Liu et al., “A systematic survey of control techniques and applications in connected and automated vehicles,” IEEE Internet Things J., vol. 10, no. 24, pp. 21892–21916, Dec. 2023. doi: 10.1109/JIOT.2023.3307002. [Google Scholar] [CrossRef]
32. S. Xu et al., “System and experiments of model-driven motion planning and control for autonomous vehicles,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 9, pp. 5975–5988, Sep. 2021. doi: 10.1109/TSMC.2021.3131141. [Google Scholar] [CrossRef]
33. S. Xu and H. Peng, “Design, analysis, and experiments of preview path tracking control for autonomous vehicles,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 1, pp. 48–58, Jan. 2019. doi: 10.1109/TITS.2019.2892926. [Google Scholar] [CrossRef]
34. S. D. Pendleton et al., “Perception, planning, control, and coordination for autonomous vehicles,” Machines, vol. 5, no. 1, Mar. 2017, Art. no. 6. doi: 10.3390/machines5010006. [Google Scholar] [CrossRef]
35. C. Shen, Y. Shi, and B. Buckham, “Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control,” IEEE Trans. Ind. Electron., vol. 65, no. 7, pp. 5796–5805, Jul. 2017. doi: 10.1109/TIE.2017.2779442. [Google Scholar] [CrossRef]
36. A. Khosravian, M. Masih-Tehrani, A. Amirkhani, and S. Ebrahimi-Nejad, “Robust autonomous vehicle control by leveraging multi-stage MPC and quantized CNN in HIL framework,” Appl. Soft Comput., vol. 111, 2024, Art. no. 111802. doi: 10.1016/j.asoc.2024.111802. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools