
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Real-Time Prediction of Urban Traffic Problems Based on Artificial Intelligence-Enhanced Mobile Ad Hoc Networks (MANETS)
1 Department of Computer Engineering, College of Computer and Information Sciences, Majmaah University, Al-Majmaah, 11952, Saudi Arabia
2 Department of Information Technology, College of Computer and Information Sciences, Majmaah University, Al-Majmaah, 11952, Saudi Arabia
* Corresponding Author: Arshiya S. Ansari. Email:
Computers, Materials & Continua 2024, 79(2), 1903-1923. https://doi.org/10.32604/cmc.2024.049260
Received 01 January 2024; Accepted 06 March 2024; Issue published 15 May 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Traffic in today’s cities is a serious problem that increases travel times, negatively affects the environment, and drains financial resources. This study presents an Artificial Intelligence (AI) augmented Mobile Ad Hoc Networks (MANETs) based real-time prediction paradigm for urban traffic challenges. MANETs are wireless networks that are based on mobile devices and may self-organize. The distributed nature of MANETs and the power of AI approaches are leveraged in this framework to provide reliable and timely traffic congestion forecasts. This study suggests a unique Chaotic Spatial Fuzzy Polynomial Neural Network (CSFPNN) technique to assess real-time data acquired from various sources within the MANETs. The framework uses the proposed approach to learn from the data and create prediction models to detect possible traffic problems and their severity in real time. Real-time traffic prediction allows for proactive actions like resource allocation, dynamic route advice, and traffic signal optimization to reduce congestion. The framework supports effective decision-making, decreases travel time, lowers fuel use, and enhances overall urban mobility by giving timely information to pedestrians, drivers, and urban planners. Extensive simulations and real-world datasets are used to test the proposed framework’s prediction accuracy, responsiveness, and scalability. Experimental results show that the suggested framework successfully anticipates urban traffic issues in real-time, enables proactive traffic management, and aids in creating smarter, more sustainable cities.Keywords
In heavily populated places, urban traffic offers serious issues since many cars compete for the same road space. Increased travel times, air pollution, and declining locals’ quality of life are all effects of heavy urban traffic. Different approaches are used to overcome these problems. Signal timings can be improved, traffic flow can be improved, and congestion can be decreased using intelligent traffic management systems. Additionally, encouraging modal shifts and reducing traffic volume may be accomplished by supporting environmentally friendly transportation alternatives, including public transportation, bicycle lanes, and pedestrian-friendly infrastructure [1]. Urban planners also place a premium on mixed-use zoning and compact city forms to mitigate the need for long-distance travel. Additionally, encouraging shared mobility and reducing the number of automobiles on the road may be accomplished via education campaigns on safe driving and carpooling. Urban traffic problems may be reduced through a thorough and diversified strategy, resulting in more effective and sustainable transportation networks for cities [2]. Systems for Urban Traffic Control and Management are essential for enhancing the effectiveness and security of urban transportation networks. These systems use cutting-edge technology and data-driven methodologies to monitor, analyze, and regulate traffic flow in real-time. Urban traffic control and management aim to optimize the flow of automobiles, pedestrians, and bicycles by integrating intelligent transportation systems, traffic signals, sensors, and communication networks. Congestion may be lessened, and travel times shortened by dynamically altering signal timings depending on traffic conditions [3]. Urban traffic systems make coordinating traffic lights at junctions and along arterial highways easier, resulting in less congestion and better traffic flow. These systems can anticipate traffic patterns and react adaptably to shifting needs by using predictive algorithms and machine learning approaches. Ultimately, urban traffic control and management systems provide higher safety, better air quality, and more mobility in urban settings [4].
Urban transportation systems’ effectiveness and efficiency are significantly impacted by traffic speed, that is a critical factor. Speed may be severely affected in cities by heavy traffic and a variety of poor road conditions. Traffic speed must be monitored and managed for the best travel times, the least congestion, and the smoothest possible traffic flow. Traffic speed data is essential for urban planners and politicians to identify areas for improvement, evaluate the success of traffic management techniques, and make educated judgments on infrastructure development and capacity increases [5]. The widespread violation of traffic laws by motor vehicles seriously affects day-to-day traffic management, making the independent evaluation of vehicle operations during urban traffic surveillance an important and pressing topic. Surveillance systems aid in implementing efficient traffic management methods, such as altering signal timings, redirecting traffic, or quickly deploying emergency services by spotting congested regions, accidents, or other interruptions [6]. Real-time data regarding the roads’ condition and the traffic volume in metropolitan areas are available via traffic information. Congestion levels, traffic incidents, lane closures, and construction zones are just a few of the many factors it includes. Sensors, cameras, GPS information, and crowdsourcing via mobile apps are some technologies used to gather this data. Traffic data is essential for improving the effectiveness, security, and dependability of urban transportation networks, which benefits commuters by improving mobility and cutting down on trip time [7]. MANETs significantly address the difficulties of managing urban traffic. MANETs provide a flexible option for effective communication between cars and infrastructure in highly populated metropolitan regions involving widespread traffic congestion and unpredictability. By enabling ad hoc connections between cars, these networks allow for transmitting real-time data such as traffic conditions, accidents on the road, and alternate routes [8]. Managing traffic overload in MANETs is essential for ensuring effective and trustworthy communication between mobile devices. The available network resources in MANETs, where devices dynamically create networks without centralized infrastructure, are constrained and shared among the participating devices. High traffic loads on the network may cause congestion and performance degradation, impairing network performance as a whole [9].
MANETs with enhancements provide interesting approaches for improving traffic management in dynamic and resource-restricted settings.AI systems can evaluate and forecast traffic trends, allowing proactive load balancing and routing choices. Furthermore, AI-enhanced MANETs can detect and reduce network traffic, identify possible bottlenecks, and adjust the network architecture for effective data transmission. By incorporating AI, MANETs may self-configure, self-optimize, and self-heal, improving the scalability and dependability of communication in mobile and dynamic situations [10]. Urban communities all across the globe continue to struggle with traffic congestion. There are several difficulties due to the sheer number of automobiles on the roadways. First, congested traffic results in lengthy delays and aggravation for commuters, wasting time and lowering productivity. A hazard to public health is also posed by the excessive number of automobiles, contributing to environmental damage and air pollution. The response times of emergency services may be hampered by traffic congestion, possibly endangering lives [11]. This study evaluated the difficulties associated with urban traffic and suggested the CSFPNN technique to anticipate and solve urban traffic problems.
The critical requirement to address the growing issues of urban congestion drives the development of artificial intelligence-enhanced Mobile Ad Hoc Networks (MANETs) for real-time prediction of traffic problems in cities. Conventional traffic management methods are unable to maintain to create the growing urban population and increasing vehicle density. By integrating AI into MANETs, traffic estimates become dynamic and adaptable, allowing for proactive interventions to reduce congestion, optimize traffic flow, and improve urban mobility as an entire. By reducing fuel consumption and emissions linked to traffic delays, this novel strategy not only improves transport systems but also supports preservation of assets and a sustainable environment.
The goal of using Mobile Ad Hoc Networks (MANETs) supplemented by artificial intelligence to handle urban traffic issues is to develop a dynamic and effective traffic control system. The aim is to improve overall urban mobility, optimize traffic flow, and lessen congestion by utilizing AI algorithms within MANETs. The objective of this strategy is to facilitate adaptive and data-driven decision-making by enabling real-time communication and coordination among cars, traffic signals, and infrastructure. In the end, the goal is to enhance the whole urban transit experience, reduce travel time, and support the development of an ecologically friendly and sustainable urban environment.
Effective transport systems are severely hampered by urban traffic congestion, which also increases travel times and pollutes the environment. Innovative solutions are required since traditional traffic management systems frequently fail to accommodate the changing traffic circumstances seen in metropolitan areas. The development of AI-enhanced MANETs is required since the present urban traffic systems are unable to optimize traffic flow due to a lack of intelligent communication and decision-making capabilities
1.4 Contributions of the Study
• To examine travel times, environmental impacts, and financial resources are all severely impacted by traffic in modern cities.
• A real-time prediction paradigm for urban traffic difficulties is presented in this study, which is supplemented with artificial intelligence (AI) and based on Mobile Ad Hoc Networks (MANETs).
• In order to evaluate real-time data collected from different sources inside MANETs, this research proposes a novel Chaotic Spatial Fuzzy Polynomial Neural Network (CSFPNN) method.
• To identify potential traffic issues and their severity in real time, the framework employs the suggested method to learn from the data and generate prediction models.
The rest of the paper is divided into sections. The objective based on the related works is provided in Section 2. The proposed methodology is shown in Section 3. The result analysis is provided in Section 4. The paper was concluded in Section 5.
The study [12] suggested the transportation infrastructure has advanced significantly in the last several decades, yet traffic issues persist since more people are living in metropolitan areas and using these modes of transportation. The techniques used are explained and examined in order to comprehend the benefits as well as limitations of these clever strategies. The article [13] looked at in order to construct and implement a system for predicting traffic flows that is both efficient and accurate. When it comes to practical use, current traffic flow prediction methods still fall short. That effort to translate theoretical advancements into responsible, real-world traffic flow prediction technologies have not advanced very far. The study [14] suggested the simulated findings demonstrate the multi-factor modeling prediction technology uses a forecasting regulator that outperforms programming in the fixed-time technique in order to ensure the reliability of each model intersecting. Vehicles’ moments in queue are shortened. Its endured well acknowledged that traffic jam is an acute problem. Two important challenges are controlling traffic and the direct effects of urban transit systems on traffic flow. It also demonstrates a model predictive control strategy for each intersection’s stability, the predictive model controller in this multi-factor model predictive system beats scheduling in the fixed-time methodology. It shortens the time drivers have to wait in line. The study [15] provided the Bayesian meta-learning tack on the age-old problem of traffic dynamics prediction and offers a fresh solution: The continuous spatial-temporal meta-learner (CST-ML). The model learns from a set of traffic prediction tasks divided up by historical traffic data to swiftly adjust its approach to similar but previously unseen tasks. The experiment’ standards requiring regular through periodic data application are inaccurate since the information, they have only contained six months’ worth of traffic information. The article [16] recommended Internet of Things (IoT) enables large cities to collect data from numerous sensors, allowing smart cities. Smart city sensors may have APIs from multiple administrative domains. The paper introduces a full method for combining diverse sensor, service, and external data into a hybrid spatial-temporal feature space. To reduce model over fitting issues, handle missing data, insufficient data, and stack LSTM to take time series trends into account. The study [17] suggested new concurrent learning framework for traffic control and execution, the study presented PL-WGAN, a technique for short-term traffic speed estimation for urban roadways. The suggested approach uses a hybrid of generative and discriminative neural networks called Wasserstein Generative Adversarial Nets (WGAN) to simulate traffic in a reliable way that is driven by data. The correctness and diversity of the input data are critical factors that affect how well the model generalizes to actual urban traffic settings and how reliable the simulated patterns of traffic.
The article [18] provided “Dynamic Traffic Correlation-based Spatio-Temporal Graph Convolutional Network (DTC-STGCN)” is a novel deep learning framework that tracks the dynamic spatio-temporal correlations among traffic data in order to accurately forecast traffic flow and speed. Dynamic adjacency matrices explain spatio-temporal correlations, and DTC-STGCN generates them from a number of traffic factors. The current frameworks still have several drawbacks that make them less effective in predicting urban traffic due to their subsequent dynamical spatio-temporal relationships. The study [19] examined policymakers might use the work to inform measures to reduce the negative effects of growing urban noise. In cities like Mumbai, where mixed-category zones are prevalent, this would pave the way for a new method of estimating background noise levels from patterns of land use, which would be a huge step forward in policymaking. Noise is defined as sound levels that are greater than the acceptable limit and cause aggravation. The article [20] provided a thorough outline of traffic forecast algorithms, this poll is designed to accomplish just that. Given the current state of the art and future prospects of AI-based traffic prediction approaches, particularly multivariate traffic time series modelling, we will be concentrating on these areas of study. One drawback is their reliance on historical data; the accuracy of forecasts may be questioned by unforeseen or sudden occurrences like accidents or road closures. The study [21] suggested the intelligent transport systems (ITS) rely on traffic forecasts for their operation. While current approaches pay attention to spatial-temporal dependency modeling, two inherent features of the traffic forecasting issue are disregarded. The limits the ability of intelligent transports systems to adapt to the dynamic and unpredictable conditions of urban traffic. The study [22] identified the most heavily populated parts of the road network and established a correlation between these areas and driver demand. The research determines the traffic congestion using the Floating Car Data technique and assesses how well the observed congestion clusters reflect the patterns of congestion on a larger metropolitan road network. The study determines the traffic congestion using the Floating Car Data technique and assesses how well the observed congestion clusters reflect the patterns of congestion on a larger metropolitan road network.
The study [23] introduced a multi-directional two-dimensional continuous urban traffic model in the paper. The (North, East, West, South) NEWS model uses four partial differential equations to show vehicle density propagation in the cardinal directions. The NEWS model can predict traffic on any metropolitan network based on its topology, infrastructure parameters, and boundary flows. Its capacity to provide real-time forecasts could be tested by unforeseen circumstances or abrupt changes in traffic dynamics. To enhance the precision of urban traffic condition forecasting, the study [24] suggested the construction of an electronic graph including the most essential sections of road. A graph convolutional neural network, a bidirectional gated recurrent unit network, and an attention mechanism are all part of an end-to-end design. The intricate and ever-changing nature of urban traffic patterns can pose challenges to effectively capturing them, which might have an influence on predicting accuracy even with the use of sophisticated neural network designs. The research [25] proposed a deep learning-based accident prediction mechanism. To forecast potential dangers, this recently proposed model takes into account both the fixed characteristics of the road, like its length and speed limit, and the dynamic ones, such the amount of traffic on the road, the sun’s inclination and elevation, and so on. The recent presented approach considers both the fluid and permanent properties of the roadway, such as its width and velocity restriction, to predict possible hazards. The speed limit is higher on continuing flow vs. interrupting flow due to the greater highway duration.
The study [26] presented a single-line detection-based time-tracking model for a solitary bus using the Kalman filter included in the model, which stand for route travel time forecast and stop dwell time prediction, respectively. The study also supplied assessment criteria and indexes for the models. A case study based on AVL data is used to conduct the error analysis of the prediction findings. The paper [27] discussed a unique approach to enhancing urban MANET routing efficacy is presented. To provide a new method for route optimization and that it might perform noticeably better than traditional protocols. The study [28] evaluated machine learning and based on data statistical approaches for predicting urban traffic travel times with a 15-min resolution over the following 24 h. For effective supply chain logistics and precise navigation services, travel time and traffic predictions in metropolitan settings are crucial. The study [29] suggested a big worldwide public health concern; the COVID-19 epidemic has disrupted people’s regular production and daily lives. In order to help municipal administrators create policies pertaining to traffic and epidemic prevention, it is possible to predict the traffic revitalization index. The study [30] recommended traffic signal control is to maximize the efficiency of transportation infrastructure use, minimize travel and waiting times, and optimize traffic flows in road networks. To address the issue of traffic signal regulation, we created a new method based on hybrid reinforcement learning and presented it in the work.
The first stage in addressing urban traffic issues is to compile the appropriate dataset, including numerous traffic characteristics. Following the collection of the dataset, preprocessing methods, such as Min-Max Normalization (MMN), are used to normalize the data and prepare it for analysis. After preprocessing, an advanced technique known as the CSFPNN is used to anticipate urban traffic issues. This ground-breaking model effectively predicts traffic patterns and degrees of congestion by combining the strengths of chaos theory, spatial analysis, and fuzzy logic. Finally, a comprehensive performance study is carried out to assess how well the CSFPNN performs in foretelling and treating urban traffic issues (Fig. 1).

Figure 1: Evaluating the efficacy of the suggested approach
Statistics on user-to-user file sharing beginning in August 2002 is included in the Gnutella MANET dataset, which was compiled by Stanford University. The dataset was constructed using PyTorch Geometric, a popular GNN framework. The dataset contains 8846 nodes that are connected by 31839 undirected edges. The MANET dataset’s meta-data is included in the Table 1. I ran a link prediction operation on the MANET dataset. The goal is to foretell the presence or absence of edges that connect two nodes. Apply the dataset to the framework after setting the train-test split mask to 80% and 20%, respectively.

3.2 Preprocessing for Min-Max Normalization
The original data set is subjected to a linear modification using the MMN. An approach that maintains the original data’s associations is called MMN. A simple method known as MMN fits data exactly within a preset limit. When applied to traffic problems in cities, MMN is an efficient solution. In this way, urban planners and traffic experts may standardize and normalize the vast amounts of traffic data collected from all sorts of different places and things.
Using the MMN method,
where,
A predefined boundary is- [
If
The process of converting unstructured source data into normalized values or ranges using notions such as mean and standard deviation is known as z-score normalization. Therefore, using the z-score parameter and the following formulas, the unstructured data may be normalized:
where,
Assume for this approach that we have five rows, X, Y, Z, U, and V, with various variables or columns that are ‘n’ in each row. Therefore, the normalized ones in each row above may be calculated using the z-score method. All values for a row are set to zero if, for example, a row’s standard deviation equals zero and all values are similar. The z-score provides the range of variables between 0 and 1, the same as that Min-Max normalization.
Decimal scaling is the method that creates a range between –1 and 1. Consequently, using the decimal scaling method:
where,
But these methods stated above are widely known to us all. But the recommended strategy, which talks about in part after this, is as follows:
3.3 Prediction of Urban Traffic Problem Using Chaotic Spatial Fuzzy Polynomial Neural Network (CSFPNN)
This study employs CSFPNN, a hybrid design combining fuzzy systems and neural networks. Fuzzy neural networks (FNNs) and polynomial neural networks (PNNs) are the two primary components of the system. FNN serves as the system’s premise, while PNN serves as its consequence in a rule-based framework. FNN uses both the BP method and the condensed fuzzy inference system as the If-Part of FPNN. The PNN is constructed and utilizes the Group Method of Data Handling (GMDH) as the Then-Part of FPNN, and the FNN has two spots where it may be coupled with PNN. This system’s design is adaptable, allowing the learning process to change the topology. As a result, FPNN is an autonomous map. CSFPNNs, which are AI-enhanced MANETs, have great potential for forecasting traffic issues in cities. The CSFPNN uses the MANETs’ capacity for self-organization to gather real-time traffic statistics from a network of linked mobile devices. The neural network design of the CSFPNN incorporates chaotic dynamics to represent the inherently complex and nonlinear nature of urban traffic patterns.
The premise element of the system in this research employs a fuzzy neural network, as was already explained. The FNN’s construction is seen in Fig. 2. FNN is created in this figure by using space partitioning for distinct variables. In this instance, the performed granulation was defined by the fuzzy sets included in each input variable. The circle with (

Figure 2: Structure of the CSFPNN premise section
where
By changing the connection weights of neurons
where,
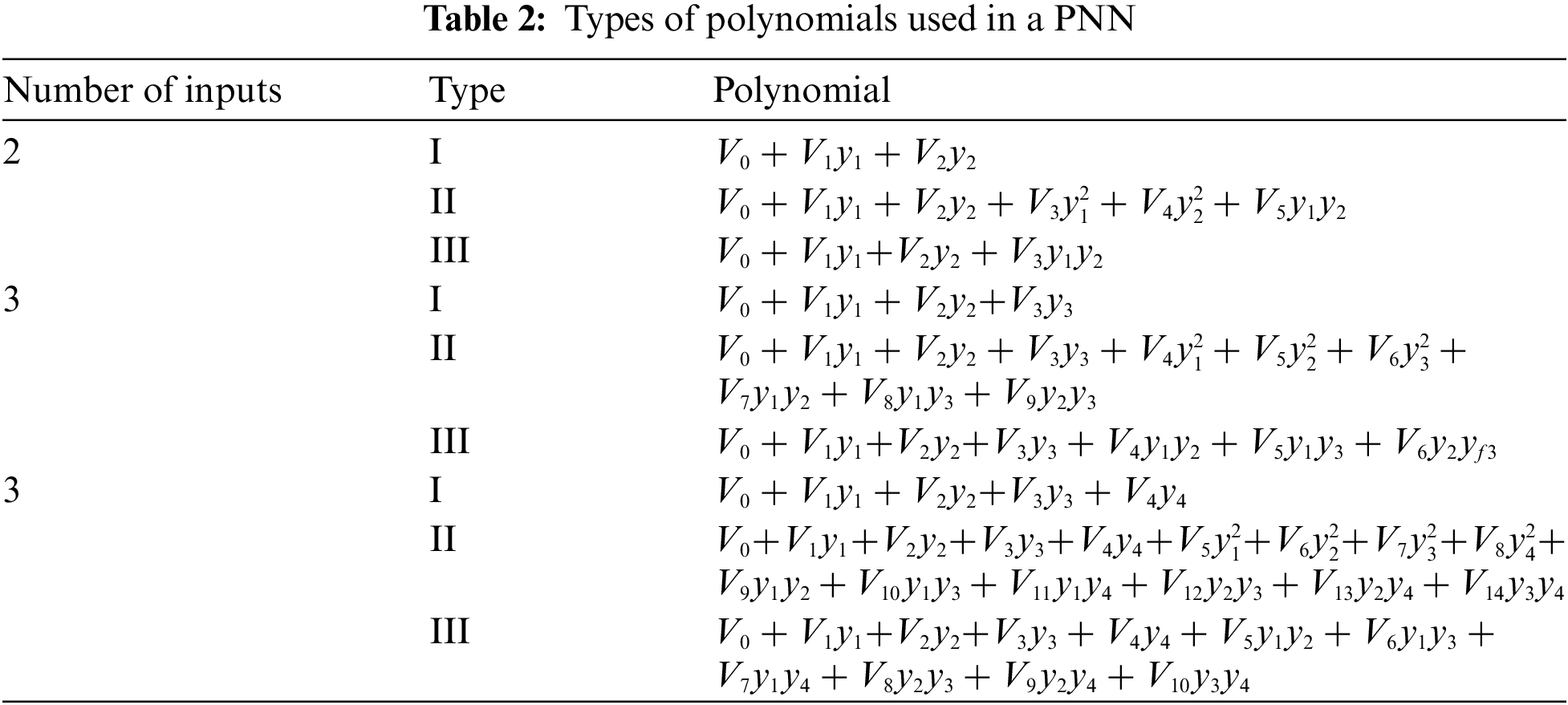
3.3.2 Neural Networks Using Polynomials
PNN is used in this study to represent the part of a fuzzy rules-based system, as was already mentioned. The method is based on the GMDH technique that employs a family of polynomials called partial descriptions (PDs), including linear, altered quadratic, etc. Selecting the most substantial input variables and polynomials ordering from these publicly accessible forms, followed by choosing each node of each layer and adding more layers until maximum performance is attained, is the most efficient technique to employ extracted PDs. The following statement can represent the input-output relationship that the PNN algorithm creates:
According to actual production
where model’s to-be-optimized coefficients are denoted as

Figure 3: An illustration of a polynomial neural network
The utilization of artificial intelligence-enhanced MANETs in conjunction with the CSFPNN to tackle urban traffic issues represents a significant development. A detailed grasp of intricate traffic patterns is provided by the spatial modeling powers of CSFPNN, enhanced by chaotic dynamics. The system’s capacity that adapts to change urban traffic circumstances is improved by including this novel neural network into MANETs. To achieve maximum performance, strong data quality must be ensured, and handling the computational complexity brought forth by chaotic dynamics might provide some obstacles. Into account the complex dynamics of urban traffic, this strategy emphasizes accuracy in predicting and flexibility, offering a viable path forward for intelligent traffic management. The subsequent action, which is to integrate the two structures that have already been explained, is the formation of CSFPNN. This means that, as shown in Fig. 4, there are two possibilities for merging the FNN and PNN. You may use any of these two potential connections positions to build an CSFPNN: Additionally, Figs. 4 and 5 show the CSFPNN final architectural designs after joining the PNN and FNN at relationship positions 1 and 2, respectively.
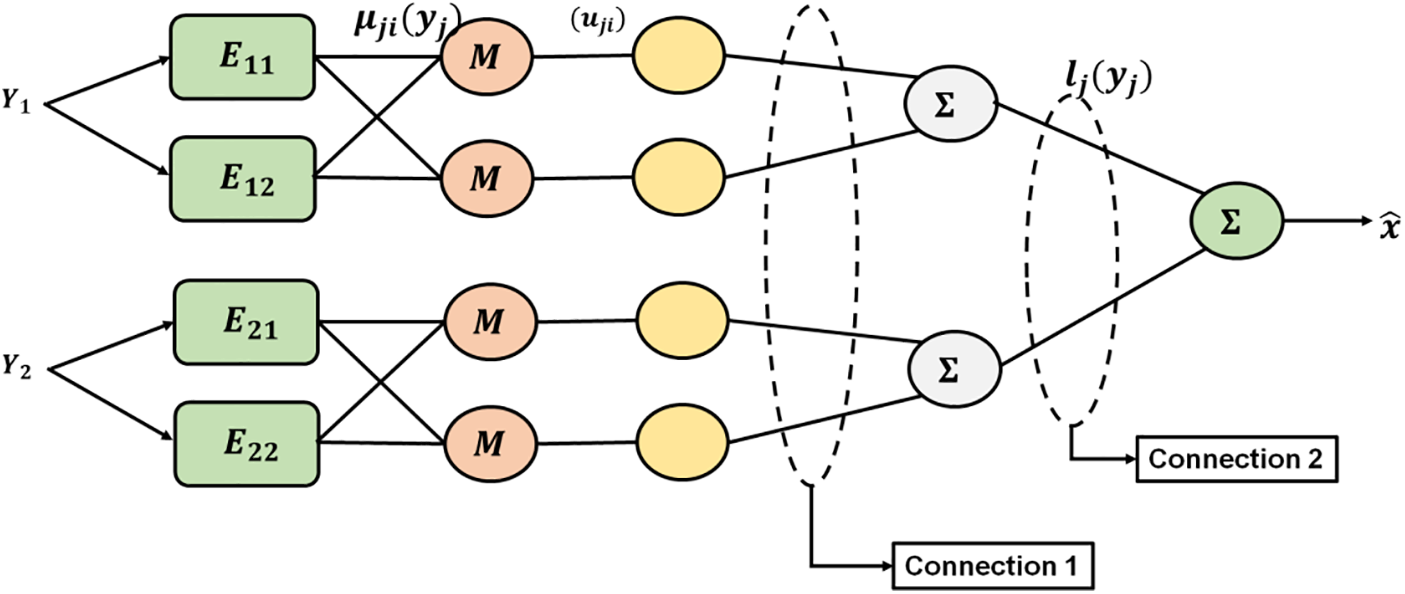
Figure 4: Two possible connecting locations in the FNN organization for building the CSFPNN
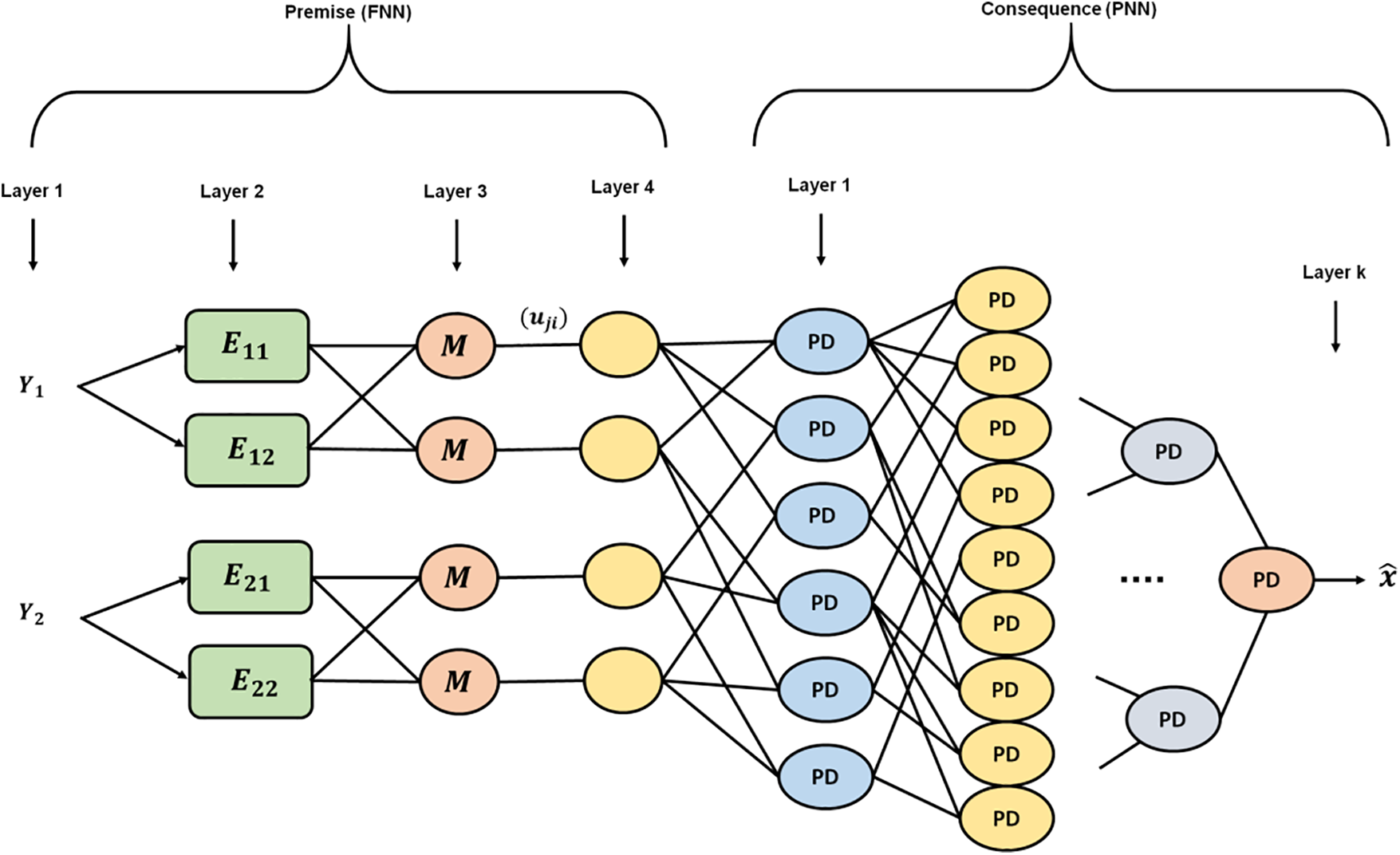
Figure 5: FNN-PNN connection point 1 (CSFPNN-Type1)
The system’s ultimate design, if we employ an initial connection point, will resemble Fig. 5. Using this method, an alternate architecture depicted in Fig. 6 will be developed if the second potential connection point (CP) (Fig. 4) is employed. In other words, for each structure depicted in Figs. 5 and 6,
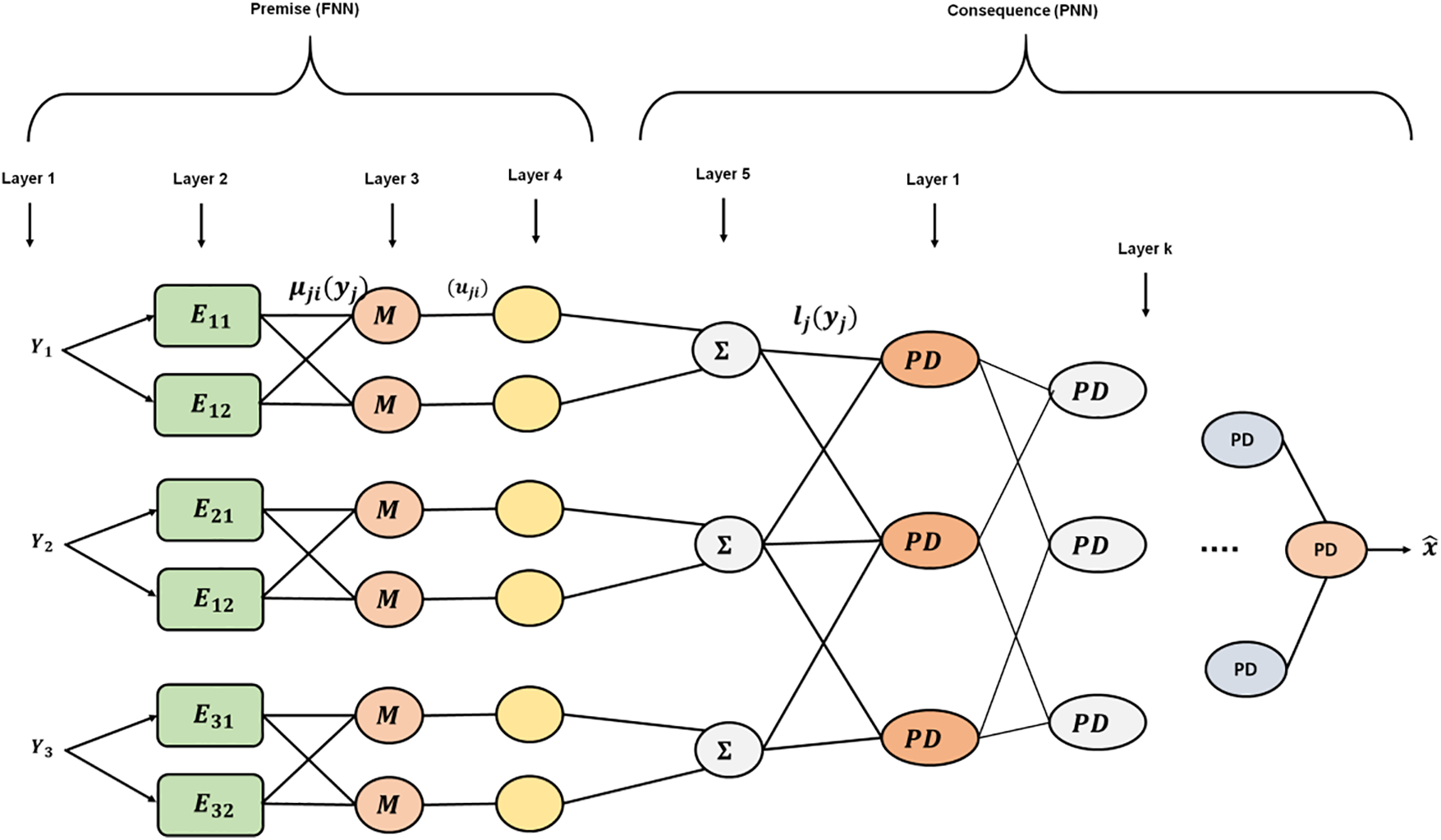
Figure 6: FNN-PNN connection point 2 (CSFPNN-Type2)
According to the CSFPNN premise and result, the design process for each Layer (L) is as follows (shown in Figs. 5 and 6):
L1: Direct distribution of signal inputs to the nodes in the following L occurs at this L.
L2: Every node in this layer corresponds to a different L1 linguistic variable. The L chooses how much of this label’s input activates.
L3: The following equation is used in this L to normalize the L activation below:
L4: Multiplied by the connection weights, the computed activation degree at L3.
In Fig. 5, the input variable for PNN is supplied as aij if connection point 1 is used for merging the FNN and PNN structures. They select a point of contact 2; Fig. 6’s aij represents an input signal to basic FNN’s output layer when regarded as an input variable for PNN.
L5: This L applies fuzzy inference using the center of gravity approach to the rules’ output.
As a result of this CSFPNN, fi becomes the input variable of PNN in this case and selects connection point 2 (Fig. 6). Output L of FNN: In this layer, the FNN’s output is determined using the following formula:
3.4.1 Steps for the CSFPNN Consequence Section
Phase P1: The input variables for the system’s consequential section are defined during this step. As previously noted, there are two ways to join FNN and PNN to create the CSFPNN. If we select the first connection point, Z appears as the input variable for the system’s consequence section. It follows that:
Additionally, X is provided as the put-in variable of the system’s outcome section if we select the second connection point. Furthermore, as shown in Fig. 3, there are:
Phase P2: Put variables for the PNN and the PD order are produced during this step, which also involves forming the PNN structure. For instance, the equation below might provide an example using three input integers and a SO polynomial.
where,
This stage involves estimating PD coefficients.
Each layer can represent a set of output equations using a training data subset, Y.
Using the LSE technique, a coefficient of PD would be calculated as follows:
Such that:
In the aforementioned phrase:
where,
Phase P3: This step ends with selecting PDs with the highest predictive capability.
A hybrid model that combines fuzzy systems with neural networks, the CSFPNN, is presented in this paper. FNN uses the condensed fuzzy inference system and the BP approach, whereas PNN utilizes the GMDH for processing. Since of its flexible architecture, FPNN may change its topology as it learns, making it a self-sufficient mapping. Self-organization is used by CSFPNNs to collect traffic statistics in real-time when they are included into AI-enhanced MANETs. The use of chaotic dynamics by the neural network emphasizes adaptation over simplifying by capturing the intrinsic complexity of urban traffic patterns.
Evaluate current data from various Mobile Ad Hoc Networks (MANETs) sources. To demonstrate its effectiveness, a suggested method’s Chaotic Spatial Fuzzy Polynomial Neural Network (CSFPNN) is compared to those of modern approaches like the graph Quantum Support Vector Machine (SVM) [30], Deep Neural Networks (DNN) [31], and K-Nearest Neighbor (KNN) [32] The outcome of the provided approach demonstrates that use in assessing the suggested system’s adaptability, responsiveness, and prediction accuracy.
In terms of information or data, accuracy relates to accuracy. When it comes to getting dependable and trustworthy outcomes, it is an important factor. Accuracy is essential to assuring the validity and efficacy of the results in many disciplines, including science, journalism, and decision-making processes.
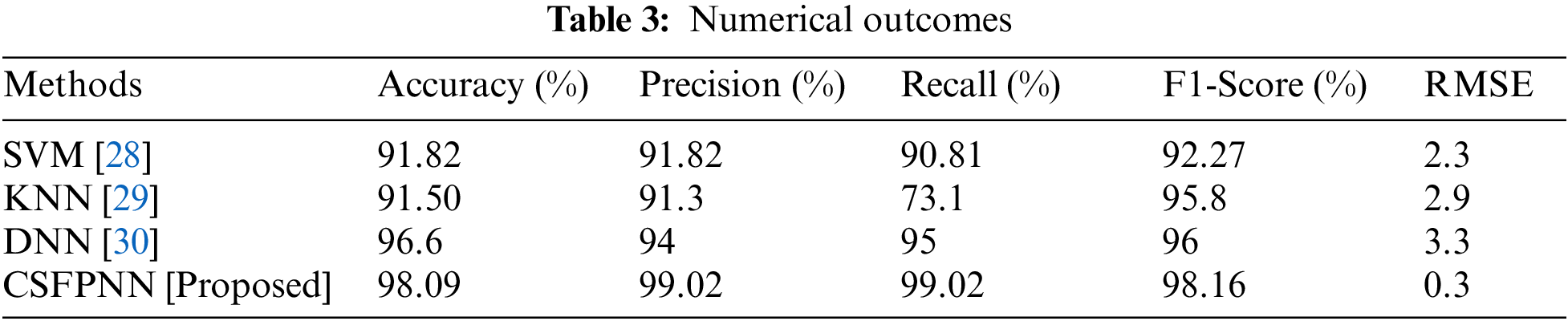
Fig. 7 shows the accuracy of the proposed system. The accuracy of consumption forecasting in current systems and the suggested method is indicated. The highest accuracy 98.09%, the suggested CSFPNN approach outperformed SVM (91.82%), KNN (91.50%), and DNN (96.6%) among the evaluated models. It demonstrates that the suggested course of action is more successful than the existing one.
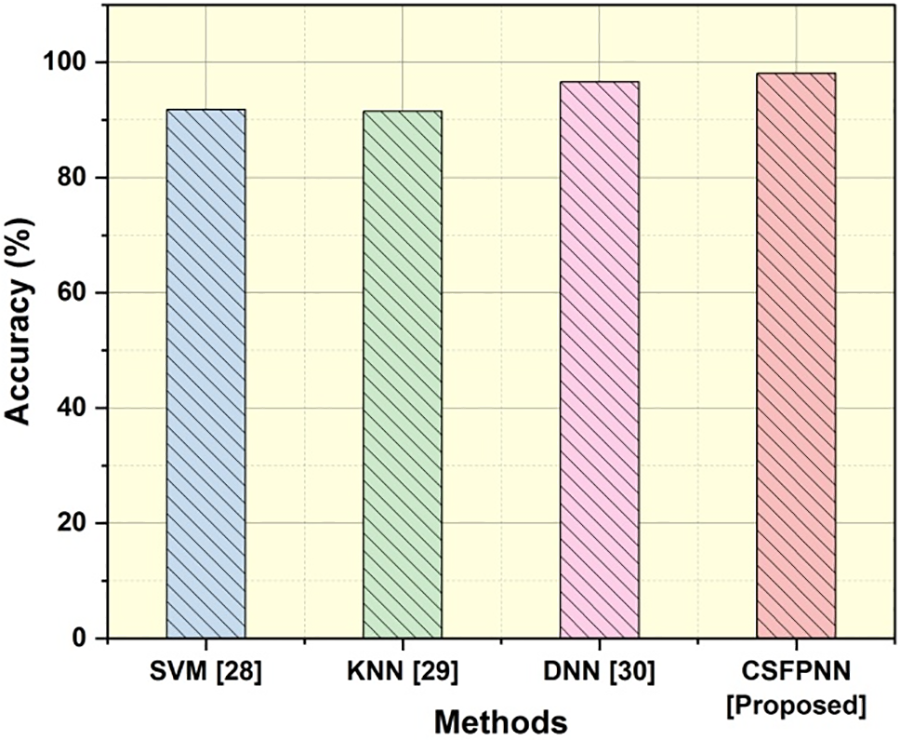
Figure 7: Accuracy
To achieve accuracy and dependability in any endeavor, precision is a key component. It entails paying close attention to every little detail and carrying out activities carefully, ensuring that every action is conducted with the highest correctness and precision. Precision is essential for reducing mistakes and attaining intended results, whether in scientific investigations, engineering designs, or interpersonal interactions.
Fig. 8 shows the precision of the proposed system. Where FP denotes a false positive, and TP indicates a true positive. In the comparison investigation, the suggested CSFPNN approach outperformed SVM (91.82%), KNN (91.3%), and DNN (94%), exhibiting the greatest precision at (99.02%). It shows that the proposed approach has more effective than the existing one.
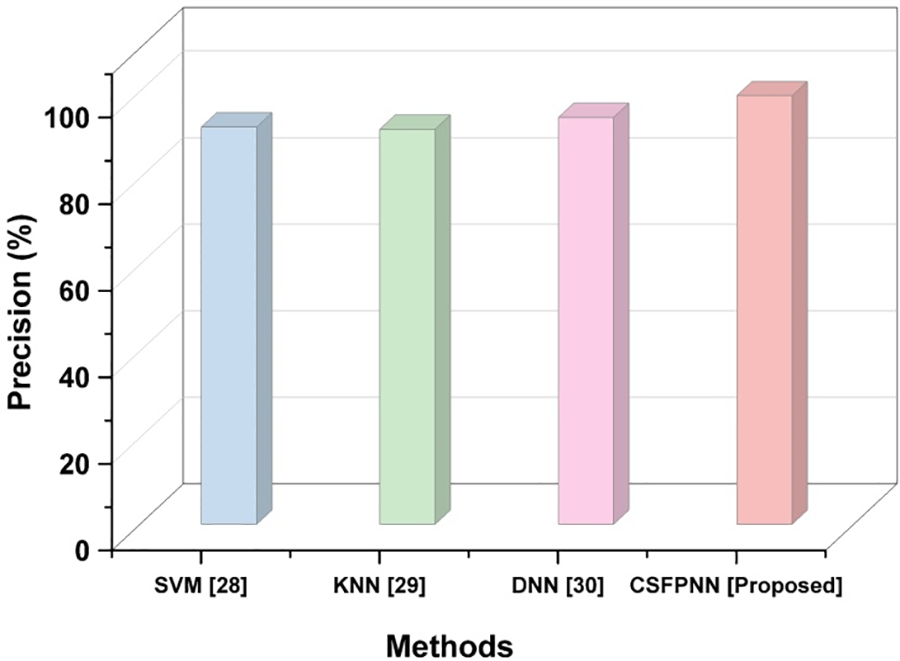
Figure 8: Precision
Recall is a crucial component of being thorough and comprehensive in any task. Making educated judgments, spotting patterns, and coming to meaningful conclusions depend on recall. By giving recollection priority, we may improve our capacity to analyze events, draw lessons from the past, and successfully tackle problems from all angles.
Fig. 9 shows the recall of the proposed system.
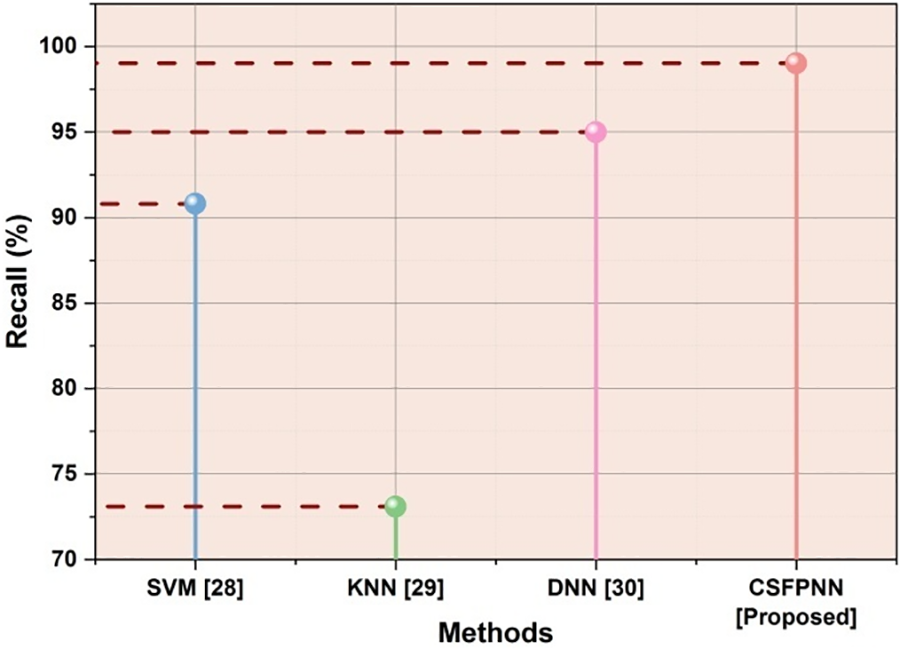
Figure 9: Recall
F1-Score is a popular statistic for assessing the effectiveness of classification models. It yields a single score that verifies a model’s efficacy by combining the accuracy and recall metrics. A model’s precision and recall are both considered when calculating the F1-Score. Precision measures how well a model can detect positive examples. The F1-Score offers a more thorough assessment of a model’s overall performance by considering both factors.
Fig. 10 shows the F1-score of the proposed system. The following are the F1-Scores for the different approaches on the dataset: The results for SVM were 92.27%, KNN was 95.8%, and DNN was 96% the F1-Score for the suggested CSFPNN technique was 98.16%. It demonstrates how successful the suggested strategy is than the current one.
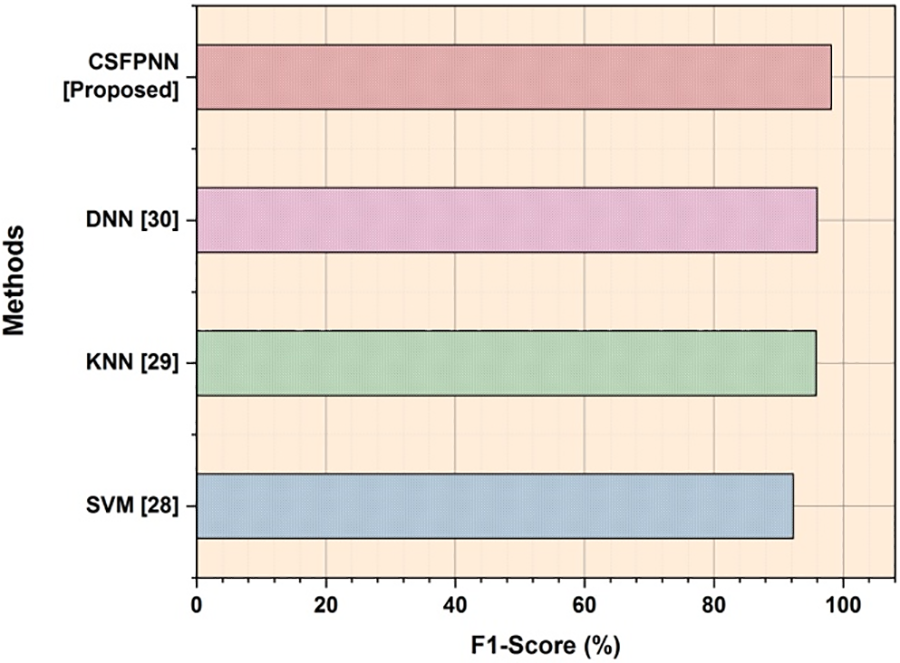
Figure 10: F1-Score
4.5 Root Mean Square Error (RMSE)
Root Mean Square Error (RMSE) assigns more importance to bigger mistakes by calculating the square root of average square discrepancies between expected and actual values. The RMSE provides a thorough evaluation of overall model performance by accounting for both the direction and size of errors. It is a useful tool in many disciplines, including machine learning, statistics, and data analysis. Lower RMSE values suggest higher predicted accuracy.
Fig. 11 shows the RMSE of the proposed system. Table 3 shows the numerical outcomes for proposed method. The consumption prediction of RMSE in existing systems and the proposed method is denoted. The following are the Root Mean Square Error (RMSE) values for the different methods: The highest RMSE obtained was 2.3 by SVM, 2.9 by KNN, 3.3 by DNN, and 0.3 by the suggested CSFPNN technique, which combine all other methods. It shows that the proposed approach has more effective than the existing one.
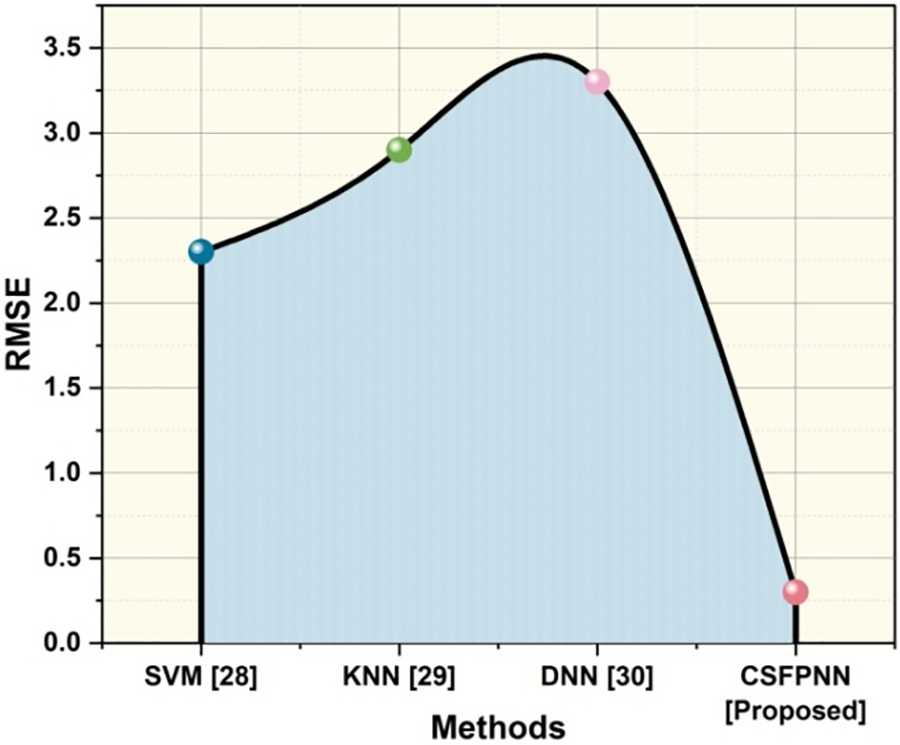
Figure 11: RMSE
The variety of reasons, including accidents, road closures, and modifications to traffic patterns, urban traffic conditions are quite dynamic. Since SVMs usually assume a relatively static environment during training, they could find it difficult to adjust rapidly to these changes [30]. In order to exchange data or update models, DNN deployment in a MANET frequently requires connection between devices. The connection generates increased traffic clouds and network overhead, especially for large models [31]. This may affect the system’s overall efficiency in circumstances involving urban traffic, when network capacity cloud is constrained. The scalability of KNN presents a challenge when the number of nodes (vehicles) in the MANET rises [32]. Consequently, a DNN with fifteen time-dependent layers is built to address the issue of traffic congestion within modern cities. DNN use in urban areas will enable architectural architects to do their work more effectively. Furthermore, the addition of more amenities to contemporary metropolitan centers will be aided by the efforts of other engineering specialties, such communication technology [33]. The decision-making framework for precise and effective traffic regulation and urban pollution reduction is provided by resulting to enhance living conditions and lead to high-quality, sustainable urban growth [34]. Still these methods have some of the limitations in real world scenarios. To overcome those drawbacks, we have proposed a novel CSFPNN to assess real-time data acquired from various sources within the MANETs. As the dataset expands, the algorithm’s performance can deteriorate, which would affect its capacity for reacting in real time to a highly dynamic urban traffic situation. Our approach produces better results as compared to the current way using the CSFPNN. The addition of a polynomial neural network component raises the bar for sophistication and improves the model’s capacity for learning and identifying complex links in the data. This enhances the MANET’s capacity to forecast traffic, manage congestion, and optimize connections. This dynamic element is further introduced. For solving complicated AI issues, fuzzy logic, neural networks, and polynomial solutions are well-balanced combined in CSFPNN, a paradigm that shows promise.
• Strength and Limitation
Improvements are shown when modeling complicated spatial interactions among data using the CSFPNN. The network’s capacity to recognize complex patterns is boosted by the addition of chaotic dynamics, which also improves accuracy across a range of applications. CSFPNN has adaptability in several fields, including as pattern recognition, time-series analysis, and image recognition. Because of its ability to handle geographical data, it is especially well-suited for jobs involving complex spatial relationships, such medical imaging and satellite imagery processing. CSFPNN’s ability to capture spatial relationships in data makes it useful for situations where element arrangement is important. The complicated nature restricts the model’s usefulness in fields where interpretability is critical by making it difficult to interpret and comprehend the decision-making process.
Urban traffic concerns are difficulties and problems with automobiles and people traveling through highly populated urban regions. Numerous causes contribute to these issues, including an abundance of automobiles, a lack of suitable road infrastructure, poor transit options, ineffective traffic control, and population increase. Using the decentralized nature of MANETs and the efficacy of AI methods, this framework aims to provide accurate and timely traffic forecasts. This study presents a unique CSFPNN technique for assessing data in real-time that has been acquired from different sources within MANETs. To anticipate potential traffic issues and their severity in real-time, the framework employs the suggested method to learn from the data and develop prediction models. The intricate and ever-changing character of urban surroundings is a significant restriction. Road infrastructure, weather, driving behavior, and unanticipated occurrences like accidents or road closures are just a few of the variables affecting traffic flow. Estimating traffic patterns and congestion levels is challenging because of the high amount of unpredictability introduced by these elements. Future studies on forecasting urban traffic issues must emphasize the use of cutting-edge technology, the integration of multiple data sources, and the encouragement of cooperation between different stakeholders to create creative solutions for effective and sustainable urban mobility.
Acknowledgement: Dr. Arshiya Sajid Ansari would like to thank the Deanship of Scientific Research at Majmaah University for supporting this work under Project No. R-2024-1008.
Funding Statement:: The authors received no specific funding for this study.
Author Contributions: All work was done by both the authors Ahmed Alhussen and Arshiya S. Ansari equally.
Availability of Data and Materials: Compiled Gnutella MANET dataset is used. All references are from Google Scholar.
Ethics Approval: Not applicable.
Conflicts of Interest: The author declares that they have no conflicts of interest to report regarding the present study.
References
1. B. Du et al., “Deep irregular convolutional residual LSTM for urban traffic passenger flows prediction,” IEEE Trans. Intell. Transport. Syst., vol. 21, no. 3, pp. 972–985, 2019. doi: 10.1109/TITS.2019.2900481. [Google Scholar] [CrossRef]
2. Q. Hou, J. Leng, G. Ma, W. Liu, and Y. Cheng, “An adaptive hybrid model for short-term urban traffic flow prediction,” Physica A: Stat. Mech. Appl., vol. 52, no. 7, pp. 121065, 2019. doi: 10.1016/j.physa.2019.121065. [Google Scholar] [CrossRef]
3. F. Zhu, Y. Lv, Y. Chen, X. Wang, G. Xiong and F. Y. Wang, “Parallel transportation systems: Toward IoT-enabled smart urban traffic control and management,” IEEE Trans. Intell. Transport. Syst., vol. 21, no. 10, pp. 4063–4071, 2019. doi: 10.1109/TITS.2019.2934991. [Google Scholar] [CrossRef]
4. A. Essien, I. Petrounias, P. Sampaio, and S. Sampaio, “A deep-learning model for urban traffic flow prediction with traffic events mined from twitter,” World Wide Web, vol. 24, no. 4, pp. 1345–1368, 2021. doi: 10.1007/s11280-020-00800-3. [Google Scholar] [CrossRef]
5. J. Wang, R. Chen, and Z. He, “Traffic speed prediction for urban transportation network: A path based deep learning approach,” Transp. Res. Part C Emerg. Technol., vol. 100, no. 2, pp. 372–385, 2019. doi: 10.1016/j.trc.2019.02.002. [Google Scholar] [CrossRef]
6. F. Zhang, C. Li, and F. Yang, “Vehicle detection in urban traffic surveillance images based on convolutional neural networks with feature concatenation,” Sens., vol. 19, no. 3, pp. 594, 2019. doi: 10.3390/s19030594. [Google Scholar] [PubMed] [CrossRef]
7. J. Ma, J. Chan, G. Ristanoski, S. Rajasegarar, and C. Leckie, “Bus travel time prediction with real-time traffic information,” Transp. Res. Part C Emerg. Technol., vol. 105, pp. 536–549, 2019. doi: 10.1016/j.trc.2019.06.008. [Google Scholar] [CrossRef]
8. D. van Anh, N. D. Tan, C. D. Truong, N. van Hau, and V. K. Quy, “Performance analysis of routing protocols for mobile ad hoc networks in urban scenarios,” J. Community, vol. 16, no. 12, pp. 545–552, 2021. doi: 10.12720/jcm.16.12.545-552. [Google Scholar] [CrossRef]
9. Y. H. Robinson et al., “Link-disjoint multipath routing for network traffic overload handling in mobile ad-hoc networks,” IEEE Access, vol. 7, pp. 143312–143323, 2019. doi: 10.1109/ACCESS.2019.2943145. [Google Scholar] [CrossRef]
10. A. Sharma et al., “Communication and networking technologies for UAVs: A survey,” J. Netw. Comput. Appl., vol. 168, no. 6, pp. 102739–102748, 2020. doi: 10.1016/j.jnca.2020.102739. [Google Scholar] [CrossRef]
11. N. R. Sabar, A. Bhaskar, E. Chung, A. Turky, and A. Song, “A self-adaptive evolutionary algorithm for dynamic vehicle routing problems with traffic congestion,” Swarm Evol. Comput., vol. 44, no. 2, pp. 1018–1027, 2019. doi: 10.1016/j.swevo.2018.10.015. [Google Scholar] [CrossRef]
12. B. Medina-Salgado, E. Sanchez-DelaCruz, P. Pozos-Parra, and J. E. Sierra, “Urban traffic flow prediction techniques: A review,” Sustain. Comput.: Inf. Syst., vol. 35, 8, no. 7, pp. 100739–100750, 2022. doi: 10.1016/j.suscom.2022.100739. [Google Scholar] [CrossRef]
13. K. Ramana et al., “A vision transformer approach for traffic congestion prediction in urban areas,” IEEE Trans. Intell. Transport. Syst., vol. 24, no. 4, pp. 3922–3934, 2023. doi: 10.1109/TITS.2022.3233801. [Google Scholar] [CrossRef]
14. S. Jafari, Z. Shahbazi, and Y. C. Byun, “Designing the controller-based urban traffic evaluation and prediction using model predictive approach,” Appl. Sci., vol. 12, no. 4, pp. 1992–1999, 2022. doi: 10.3390/app12041992. [Google Scholar] [CrossRef]
15. Y. Zhang, Y. Li, X. Zhou, J. Luo, and Z. L. Zhang, “Urban traffic dynamics prediction a continuous spatial-temporal meta-learning approach,” ACM Trans. Intell. Syst. Technol., vol. 13, no. 2, pp. 1–19, 2022. doi: 10.1145/3474837. [Google Scholar] [CrossRef]
16. N. Zafar, I. U. Haq, J. U. R. Chughtai, and O. Shafiq, “Applying hybrid LSTM-GRU model based on heterogeneous data sources for traffic speed prediction in urban areas,” Sens., vol. 22, no. 9, pp. 3348–3360, 2022. doi: 10.3390/s22093348. [Google Scholar] [PubMed] [CrossRef]
17. J. Jin et al., “A GAN-based short-term link traffic prediction approach for urban road networks under a parallel learning framework,” IEEE Trans. Intell. Transport. Syst., vol. 23,9, no. 9, pp. 16185–16196, 2022. doi: 10.1109/TITS.2022.3148358. [Google Scholar] [CrossRef]
18. Y. Xu, X. Cai, E. Wang, W. Liu, Y. Yang and F. Yang, “Dynamic traffic correlations based spatio-temporal graph convolutional network for urban traffic prediction,” Inf. Sci., vol. 621, pp. 580–595, 2023. doi: 10.1016/j.ins.2022.11.086. [Google Scholar] [CrossRef]
19. A. R. Soni, K. Makde, K. Amrit, R. Vijay, and R. Kumar, “Noise prediction and environmental noise capacity for urban traffic of Mumbai,” Appl. Acoust, vol. 188, no. 1, pp. 108516–108528, 2022. doi: 10.1016/j.apacoust.2021.108516. [Google Scholar] [CrossRef]
20. M. Shaygan, C. Meese, W. Li, X. G. Zhao, and M. Nejad, “Traffic prediction using artificial intelligence: Review of recent advances and emerging opportunities,” Transp. Res. Part C Emerg. Technol., vol. 145, no. 4, pp. 103921–103930, 2022. doi: 10.1016/j.trc.2022.103921. [Google Scholar] [CrossRef]
21. C. Chen, Y. Liu, L. Chen, and C. Zhang, “Bidirectional spatial-temporal adaptive transformer for urban traffic flow forecasting,” IEEE Trans. Neur. Netw. Learn. Syst., vol. 34, no. 4, pp. 1121–1133, 2022. [Google Scholar]
22. K. M. Almatar, “Traffic congestion patterns in the urban road network: (Dammam metropolitan area),” Ain Shams Eng. J., vol. 14, no. 3, pp. 101886–101891, 2023. doi: 10.1016/j.asej.2022.101886. [Google Scholar] [CrossRef]
23. L. Tumash, C. Canudas-de-Wit, M. L. Delle Monache, “Multi-directional continuous traffic model for large-scale urban networks,” Transp. Res. Part B: Methodol., vol. 158, no. 1, pp. 374–402, 2022. doi: 10.1016/j.trb.2022.02.011. [Google Scholar] [CrossRef]
24. W. Lu, Z. Yi, R. Wu, Y. Rui, and B. Ran, “Traffic speed forecasting for urban roads: A deep ensemble neural network model,” Physica A: Stat. Mech. Appl., vol. 593, no. 4, pp. 126988, 2022. doi: 10.1016/j.physa.2022.126988. [Google Scholar] [CrossRef]
25. R. C. Park and E. J. Hong, “Urban traffic accident risk prediction for knowledge-based mobile multimedia service,” Pers. Ubiquit. Comput., vol. 51, no. 3, pp. 1–11, 2022. doi: 10.1007/s00779-020-01442-y. [Google Scholar] [CrossRef]
26. X. Zhang, L. Lauber, H. Liu, J. Shi, M. Xie and Y. Pan, “Travel time prediction of urban public transportation based on detection of single routes,” PLoS One, vol. 17, no. 1, pp. e0262535–e0262543, 2022. doi: 10.1371/journal.pone.0262535. [Google Scholar] [PubMed] [CrossRef]
27. S. S. Priya and P. Ssvidan, “Routing optimization for mobile ad hoc networks (MANETs) in urban environments,” in 2023 Int. Conf. Self Sustain. Artif. Intell. Syst. (ICSSAS), 2023, pp. 1–6. [Google Scholar]
28. H. Novak, F. Bronić, A. Kolak, and V. Lešić, “Data-driven modeling of urban traffic travel times for short-and long-term forecasting,” IEEE Trans. Intell. Transport. Syst., vol. 24, no. 10, pp. 11198–11209, 2023. doi: 10.1109/TITS.2023.3287980. [Google Scholar] [CrossRef]
29. Y. Wang, Z. Lv, Z. Sheng, H. Sun, and A. Zhao, “A deep spatio-temporal meta-learning model for urban traffic revitalization index prediction in the COVID-19 pandemic,” Adv. Eng. Inform., vol. 53, no. 4, pp. 101678–101688, 2022. doi: 10.1016/j.aei.2022.101678. [Google Scholar] [CrossRef]
30. A. A. Agafonov and V. V. Myasnikov, “Hybrid prediction-based approach for traffic signal control problem,” Opt. Mem. Neural Netw., vol. 31, no. 3, pp. 277–287, 2022. doi: 10.3103/S1060992X2203002X. [Google Scholar] [CrossRef]
31. T. Tekdogan, “Analyzing the traffic of MANETs using graph neural networks,” in Proc. IEEE Int. Conf. Mach. Learn. Appl. Netw. Technol. (ICMLANT), Soyapango, El Salvador, 2022, pp. 1–4. [Google Scholar]
32. M. Anjaneyulu and M. Kubendiran, “Short-term traffic congestion prediction using hybrid deep learning technique,” Sustain., vol. 15, no. 1, pp. 74, 2022. doi: 10.3390/su15010074. [Google Scholar] [CrossRef]
33. A. H. A. Hussain et al., “Urban traffic flow estimation system based on gated recurrent unit deep learning methodology for internet of vehicles,” IEEE Access, vol. 11, pp. 58516–58531, 2023. doi: 10.1109/ACCESS.2023.3270395. [Google Scholar] [CrossRef]
34. W. Du et al., “Deciphering urban traffic impacts on air quality by deep learning and emission inventory,” J. Environ. Sci., vol. 124, pp. 745–757, 2023. doi: 10.1016/j.jes.2021.12.035. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools