
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Anomaly Detection Algorithm of Power System Based on Graph Structure and Anomaly Attention
Zhaoqing Power Supply Bureau of Guangdong Power Grid Co., Ltd., Zhaoqing, 526060, China
* Corresponding Author: Yifan Gao. Email:
(This article belongs to the Special Issue: AI and Data Security for the Industrial Internet)
Computers, Materials & Continua 2024, 79(1), 493-507. https://doi.org/10.32604/cmc.2024.048615
Received 13 December 2023; Accepted 11 February 2024; Issue published 25 April 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In this paper, we propose a novel anomaly detection method for data centers based on a combination of graph structure and abnormal attention mechanism. The method leverages the sensor monitoring data from target power substations to construct multidimensional time series. These time series are subsequently transformed into graph structures, and corresponding adjacency matrices are obtained. By incorporating the adjacency matrices and additional weights associated with the graph structure, an aggregation matrix is derived. The aggregation matrix is then fed into a pre-trained graph convolutional neural network (GCN) to extract graph structure features. Moreover, both the multidimensional time series segments and the graph structure features are inputted into a pre-trained anomaly detection model, resulting in corresponding anomaly detection results that help identify abnormal data. The anomaly detection model consists of a multi-level encoder-decoder module, wherein each level includes a transformer encoder and decoder based on correlation differences. The attention module in the encoding layer adopts an abnormal attention module with a dual-branch structure. Experimental results demonstrate that our proposed method significantly improves the accuracy and stability of anomaly detection.Keywords
As China’s computer technology and artificial intelligence technology continue to mature, more and more industrial equipment to pursue the realization of industrial intelligence. As the core hub of our production and life, the power system is developing rapidly in the direction of large capacity, ultra-high voltage and long distance, and the requirements for safe and reliable operation of power equipment are becoming more and more strict. Therefore, the research and application of fault diagnosis technology for power equipment is of great practical significance. How to improve the accuracy and speed of the fault diagnosis system, so that the system can quickly and effectively find faults, locate faults, and analyze faults, is an important issue in power grid protection. A number of scholars and industry practitioners are currently working on the detection of anomalies in equipment, which can be defined as the problem of finding instances or models in data that deviate from normal behaviors [1]. Depending on the application area, these ‘deviations’ can also be referred to as anomalies, outliers or singularities. Anomaly detection is used in a wide variety of fields, such as cyber security [2], anomaly detection in industrial systems [3], and network security [4] among others. One of the main reasons why anomaly detection is important is that anomalies often indicate important, critical and hard-to-capture information that is crucial to a company. Sheng [5] used multi-sensors to monitor the three main parameters of temperature, smoke and firelight, and uses multi-sensor fusion technology to solve the contradiction between alarm sensitivity and false alarm rate. Liu et al. [6] analyzed the sound data and vibration data of communication room equipment to determine whether the current health status of communication room equipment is abnormal; and predict the development tendency of the health status of communication room equipment and the time point of reaching the dangerous level. Li [7] used a fuzzy neural network combining neural networks and fuzzy theory to analyze the relationship between the various influencing factors and the equipment status in the power dispatch system, and to accurately describe the operation status of the equipment. The above methods do not work well for the detection of high-dimensional time series data. How to capture complex inter-sensor relationships and detect and interpret anomalies that deviate from these relationships is a challenging problem today? In addition to this, existing anomaly detection methods have several drawbacks, such as incorrect data collection, difficulty in parameter tuning, and the need for annotated datasets for training [8]. Recently, deep learning methods have enabled improved anomaly detection in high-dimensional datasets. Transformers [9] has achieved excellent performance in many tasks in natural language processing and computer vision, and as a result an increasing number of researchers are applying Transformers to anomaly detection. Yin et al. [10] proposed an integrated model of convolutional neural networks (CNN) and recursive autoencoders for anomaly detection and used two-stage sliding windows in data preprocessing to learn data features, with results showing better performance on multiple classification metrics. Li et al. [11] used self-supervised models to construct a high-performance defect detection model that detects unknown anomalous patterns in images in the absence of anomalous data. Xu et al. [12] used the Transformer model and incorporated a very large and very small strategy to amplify, the gap between normal and abnormal data points to improve the correct detection rate of the model. To improve the feature extraction of models for non-linear variables, graphs are widely used to describe real-world objects and their interactions. Graph Neural Networks (GNN) [13–16] as de facto models for analyzing graph structured data, are highly sensitive to the quality of a given graph structure. This paper introduces an algorithm for anomaly detection in power systems based on graph structure and anomaly attention [17–19] which uses an unsupervised deep learning approach to detect anomalies in power equipment, omitting the step of manually annotating the dataset. The anomalous data and states are detected by exploiting correlations between multidimensional time series variables. Its validation results show that multidimensional variables can effectively capture the relationships and correlations between equipment operating states, avoiding the problems of limited prediction accuracy and lack of stability associated with single-dimensional data. Its contributions are summarized below:
• In this paper, a graph structure is established to represent multidimensional time series as directed graphs, enabling the model to learn the dependencies and correlations between multidimensional time data more effectively;
• In terms of technology, we propose a power system anomaly detection algorithm based on graph structure and anomaly concern to evaluate the healthy operation status of power plant rooms and to conduct unsupervised research on early faults;
• Based on the traditional transformer model, the Coding-Decoding Anomaly Detection Model (CD-ADM) model proposed in this paper uses a network structure with multiple encoders in series, which solves the problem that there may be too many data features and the anomaly detection capability of the model decreases.
The remainder of the paper is organized as follows. We describe the methodology in Section 2, which includes the utilization of graph structures, graph convolutional networks, and an abnormal attention mechanism. Section 3 outlines the model’s flow, from data preprocessing to the final output. In Section 4, we present the results of our experiments, including evaluation metrics and performance comparisons. Finally, we provide discussion and conclusions in Sections 5 and 6.
The text graph structure is a more complex data structure than linear tables and tree structures, which can transform data from two-dimensional to multidimensional representation. A node can be connected to any node, and the structure formed by connecting all nodes is called a graph structure. In the graph structure, there may be an association between any two nodes, that is, there are various adjacency relationships between nodes. The graph structure is usually expressed as:
where G represents a graph, V is the set of all nodes in the graph, and E is the set of edges between nodes.
In a power machine room that needs to detect faults, sensors are used to read data such as main bearing temperature, fan speed, N1 CPU temperature, PCH, power supply voltage, etc., to form a multidimensional time series as the input vector X, (1) Multivariate time series: Multivariate time. The sequence can be expressed as:
where
Figure 1: Schematic diagram of graph structure
The definition of a graph is
where N represents the number of sensors.
where
Since the model does not know the edge information in the graph structure when it is initialized, that is, E is unknown, we randomly initialize E and put it and the adjacency matrix in the model’s graph structure into the graph feature extraction network for training. Here we use the adjacency matrix A to represent the graph structure in a matrix. The sensors corresponding to the multidimensional time series are regarded as nodes in the graph structure, the correlation between sensors is regarded as the edges between nodes in the graph structure, and an adjacency matrix is constructed based on the correlation between nodes in the graph structure.
First, for each sensor node, select relevant nodes to form a candidate node set:
which does not contain i.
In order to express the correlation between sensor node j and candidate node i, the correlation measurement relationship is introduced, expressed by
where the first part is cosine correlation, which is used to measure the correlation between nodes in space, and the latter part is P probability correlation,
where
Using Eq. (6), first calculate the correlation between sensor i and candidate node j, and then select the first k values, ( N 3 < K < N), where the k value here can be selected according to the complexity of the graph structure expected to be designed by the user, and k the adjacency matrix element corresponding to the value is set to 1, and the rest are 0.
Merge the adjacency matrix A with the additional weight E of the graph structure to obtain the aggregation matrix
where
2.2 Graph Convolutional Network (GCN)
Graph convolutional neural network [20–22], is a type of neural network that convolves the graph structure and is essentially a feature extractor. Since the graph structure is more complex and irregular than the tree structure, it can be regarded as a kind of infinite dimensional data, and it does not have translation invariance during data processing. Therefore, CNN and Recurrent Neural Network (RNN) cannot be used for feature extraction. However, because nodes in the graph structure are easily affected by neighboring nodes, they will also affect other nearby nodes. Under the influence of this interdependence, the nodes will reach a final equilibrium state. Taking advantage of this feature, graph convolutional neural networks can complete feature extraction of graph structures. This article builds a lightweight convolutional neural network to extract features of the graph structure. The parameters of the convolution kernel here are 3 * 3. The input of the network is an aggregation matrix, which is an N-order square matrix, where N represents the number of sensors. That is, the dimensions of multidimensional time series. Due to the lightweight characteristics of the convolutional network, the network is easy to transplant and embed. The graph convolutional neural network shown in Fig. 2, can be used to learn the correlation of adjacent nodes, that is, to build a feature extractor based on the aggregation matrix to learn the information in the graph structure and connect the nodes with surrounding nodes.

Figure 2: Graph convolutional neural network for feature extraction of graph structures
The input aggregation matrix is
where
where
Through the convolutional neural network extracted from graph structure features, the model output is the representation of N nodes, that is
2.3 Abnormal Attention Mechanism
Literature [12] improved the structure of the transformer and proposed two methods for calculating correlation, namely a priori correlation and a sequence correlation. The prior correlation mainly represents the correlation between each time point and adjacent time points, while the sequence correlation The focus is on the correlation between each time point and the entire sequence. In view of this, the network structure diagram used in the proposed model is shown in Fig. 3. Coding-Decoding Anomaly Detection Model (CD-ADM). That is, the multidimensional time series perceived by the power system is intercepted through a sliding window, and a time series of length T is intercepted. An encoder based on the anomaly attention mechanism is used for feature extraction, and then the decoder based on the multi-head attention mechanism is used for prediction.

Figure 3: Abnormal attention mechanism structural mode
The reconstruction error of its output is:
where
where
Due to the rarity of equipment anomalies in power equipment rooms and the dominance of the normal mode, it is difficult to establish a strong correlation between anomalies and the entire sequence. Anomalous correlations should be clustered at adjacent time points, which are more likely to contain similar anomalous patterns due to continuity. This adjacent correlation bias is called a priori correlation. The present invention calculates it and records it as P, and uses the learnable Gaussian kernel r to calculate it. The calculation method is as follows:
where
Rescale(.) represents the division by row sum operation, which is used to transform the associated weight into a discrete distribution. The model structure of the decoder is shown in Fig. 4 below.

Figure 4: The model structure of the decoder
The reconstruction error is:
As an unsupervised task, we employ a reconstruction loss to optimize our model. The reconstruction loss will guide the series of correlations to find the most informative correlation. To further amplify the differences between normal and abnormal time points, we also use additive losses to amplify the correlation differences. The loss function is:
where e is the additional weight of each node, w is the parameter of the neural network, h(t) is the output obtained after the adjacency matrix of the graph structure passes through the graph neural network,
In the formula,
where
Set the threshold to the maximum value of the validation set data, that is, exceed the maximum anomaly score of the validation data set. If A(t), exceeds a fixed threshold, the time is marked as an anomaly. We use the data of the previous few days at the current moment for training modeling, and then use the data of the current day as the test set to obtain the anomaly score. This improvement also achieves the ability to detect device anomalies in real time.
3 Equations and Mathematical Expressions
In the experiment, the operating health status of the power computer room is displayed in the form of data, which is used as an evaluation indicator for computer room maintenance. Through a reasonable diagnosis mechanism and status operation monitoring mechanism, the probability of failure in the power machine room will be effectively reduced. The proposed model constructs the following six parts for the abnormal diagnosis process, as shown below: 1. Perceive the signal; 2. Perform preprocessing operations on multidimensional l time series signals and convert them into graph structures; 3. Input the adjacency matrix obtained from the graph structure into the graph neural network, and the model output is a weighted set result between multidimensional time series variables; 4. Pass the original signal through a sliding window of length T and input it into the encoder based on the self-attention mechanism. Multiple encoders are connected in series, and then input into the decoder containing the multi-head attention module, and then the model output is the reconstruction error; 5. Establish a threshold and define anomaly scores exceeding the threshold as anomaly sequences; 6. After an abnormality occurs, start the early warning mode. The abnormal diagnosis flow chart construction is shown in Fig. 5.

Figure 5: Anomaly detection flow chart
First, the abnormal model training of the power computer room data set and the verification result analysis are performed. Figs. 6 and 7 below respectively show the verification results of the (long short-term memory) LSTM model and the CD-ADM model on the power computer room test set. The blue solid line represents the real data, the orange dotted line represents the predicted data, and the residual value of the two. It is the green curve.
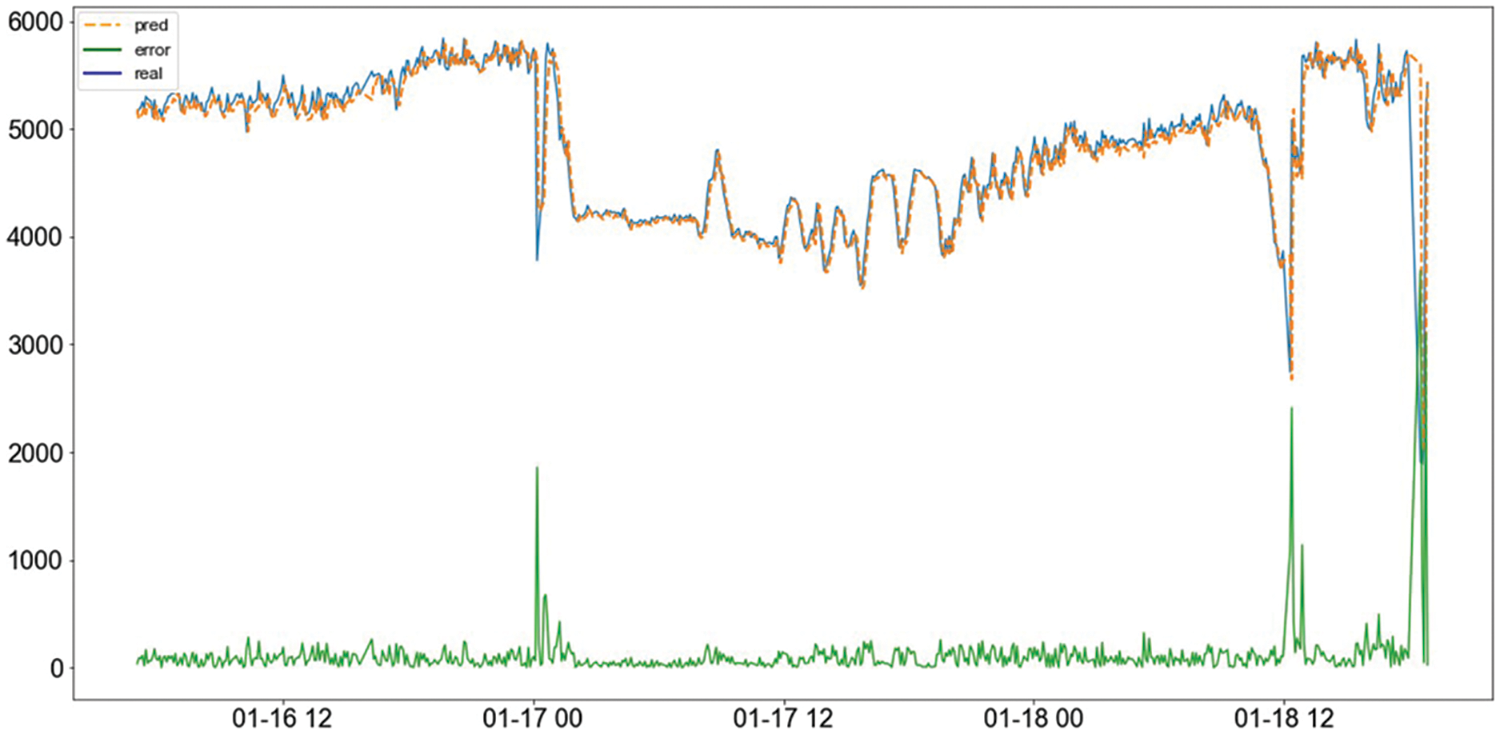
Figure 6: LSTM model test results chart

Figure 7: CD-ADM model test results char
In Figs. 6 and 7, the LSTM model test results show smaller fitting errors, while CD-ADM shows a more obvious residual amount. It is impossible to judge the pros and cons of the two methods just from the above picture. Next, real anomaly points are added, and the prediction error (green curve) is used as the evaluation criterion to determine equipment anomalies. The anomaly detection results in Fig. 8, below are obtained:
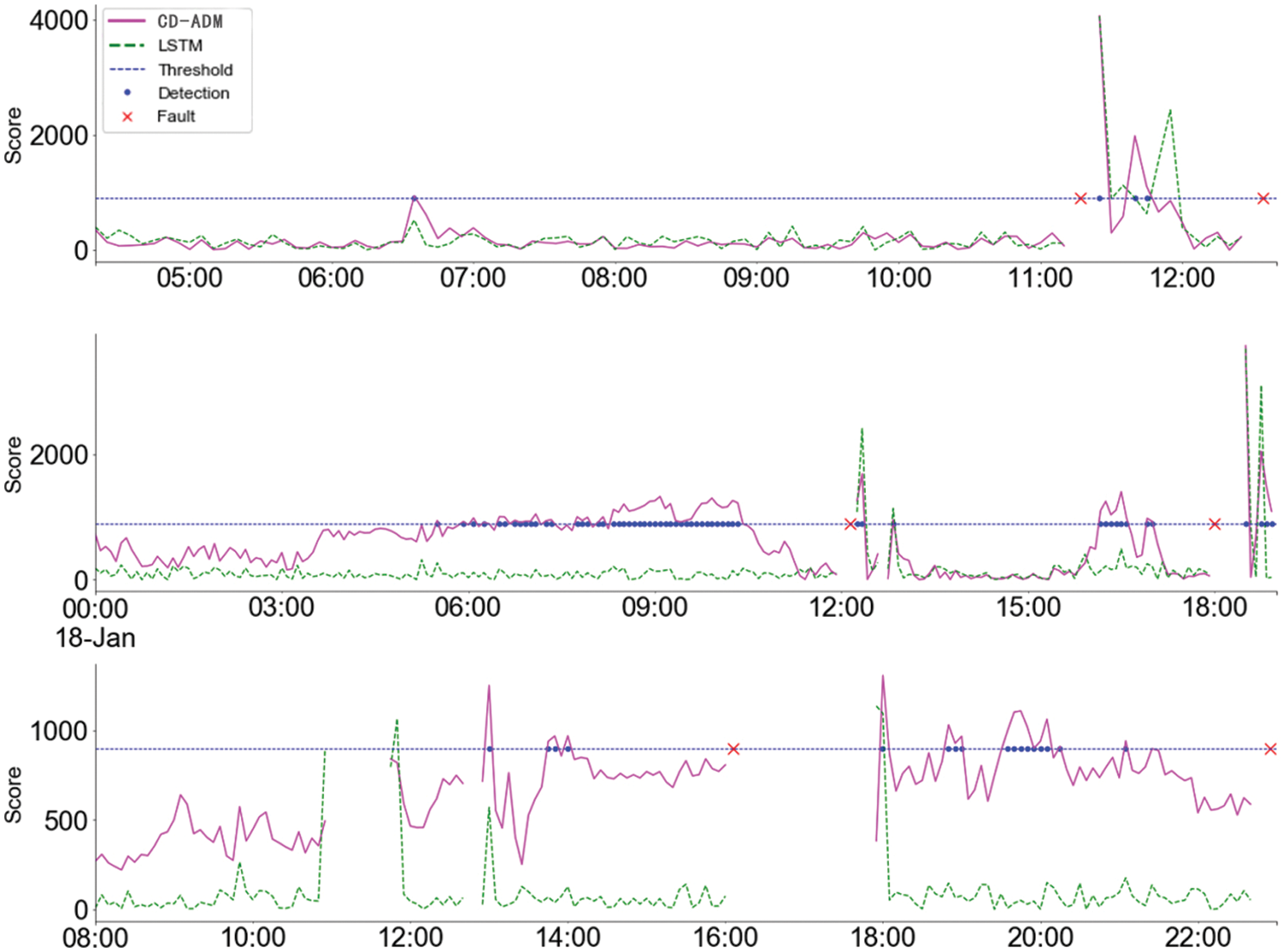
Figure 8: Comparison chart of anomaly detection between LSTM model and CD-ADM model
The pink curve in Fig. 8, above is the anomaly score curve of the CD-ADM model, the green is the anomaly score curve of the LSTM model, and the blue dotted line is the artificially set anomaly judgment threshold. If it is higher than the blue dotted line, it is considered an anomaly. The real points are abnormal alarms detected by the model, and the red crosses are the actual fault occurrence points of the data. The above figure shows that the CD-ADM model can fully learn the characteristics that the device health status should display, and it will also show a gradual upward trend when it is closer to the abnormal point. This is what this experiment hopes the model can learn. Important information. In the first section of the curve, the CD-ADM model and the LSTM model show similar characteristics; in the second section, the former shows a gradually increasing trend than the latter and generates multiple times before the first shutdown for maintenance, warning information, and also showed similar characteristics before the second shutdown; in the third paragraph, it can be seen that the improved model clearly shows an increasing trend, but the trend cannot be seen in the unimproved model. The upward trend shown in the CD-ADM model provides valuable information about the operational health of the equipment, because failures caused by this slow wear are often progressive and avoidable. Figs. 9 and 10 show the fitting performance of the CD-ADM model and LSTM model on normal datasets in power rooms. Comparing the prediction error curves, except for some differences in the time period when the real curve fluctuates, the overall prediction modeling accuracy and fitting effect are maintained very well.

Figure 9: The fitting of CD-ADM on normal data sets in power rooms

Figure 10: The fitting of LSTM on normal data sets in power rooms
In this study, we proposed a novel approach for abnormal warning detection in power equipment rooms based on graph convolutional attention mechanism. Our results demonstrate that the use of graph convolutional networks with attention mechanism yields promising performance in identifying abnormal patterns within the power equipment rooms. The model showed high accuracy in detecting various anomalies such as temperature fluctuations, humidity deviations, and equipment malfunctions. One of the key strengths of our approach lies in its ability to capture complex relationships and dependencies among different sensors and equipment within the power equipment rooms. By leveraging the graph convolutional attention mechanism, the model can effectively learn and adapt to the dynamic interactions among the various data points, leading to improved abnormal detection capability. However, it is important to acknowledge the limitations of our study. One potential limitation is the dependency on the quality and quantity of the training data. Collecting sufficient and diverse datasets to represent all possible abnormal scenarios remains a challenge. Additionally, the computational complexity associated with graph convolutional networks may hinder real-time deployment in some practical settings.
In future work, it would be beneficial to explore methods for enhancing the robustness of the model against noisy or incomplete data. Furthermore, investigating techniques to optimize the computational efficiency of the graph convolutional attention mechanism would facilitate its implementation in real-time abnormal warning systems. Additionally, the integration of multi-modal data sources and the incorporation of domain knowledge could further improve the model’s performance in capturing complex abnormal patterns.
This article uses the encoding-decoding anomaly detection model (CD-ADM) to reproduce the process of abnormal warning in the computer room. This paper proposes the application of deep learning to intelligent detection methods of power equipment room equipment faults, and the use of unsupervised deep learning methods to reduce the labeling of data sets, which greatly saves labor costs and thus improves traditional detection methods. This paper proposes a graph structure to establish correlations between multidimensional data. Traditional anomaly detection methods do not know which sensors are related to each other, so it is difficult to build sensor data with many potential correlations. In addition, traditional graph neural networks use the same model to establish the graph structure for each node, which limits the flexibility of the model. Therefore, we improve the graph-structured feature learning network, add additional weights to each edge, and select the k value for training according to the complexity of the model. Therefore, we can accurately understand the interdependencies between sensors. That is, the multidimensional time series is represented by a graph structure, and the aggregation matrix obtained by the graph structure is input to the feature learning network of the graph structure. Taking advantage of the lightweight characteristics of the network, it is easy to transplant and embed the network, realize nonlinear transformation, enhance the expression ability of the model, and perform end-to-end learning of node feature information and structural information. Finally, this method can effectively learn the correlation between multidimensional time variables, establish the topology of time series, and convert from two-dimensional space to multidimensional space. In addition, based on the self-attention mechanism, the single-branch self-attention module is changed to a dual-branch anomaly attention detection module to improve the model’s ability to distinguish between normal data and abnormal data. In the prediction time series module, in order to avoid the “over-fitting” phenomenon, the gradient disappears and the prediction results are often volatile, which makes the prediction performance of the model unstable. The proposed model can effectively solve the above problems by connecting multiple encoders in series.
Acknowledgement: Thanks to Prof. Dr. Jiande Zhang from Nanjing Institute of Technology for his comments. The authors thanks to all individuals who contributed to the planning, implementation, editing, and reporting of this work but are not listed as authors. Their invaluable support played a significant role in the success of this research.
Funding Statement: This paper was funded by the Science and Technology Project of China Southern Power Grid Company, Ltd. (031200KK52200003), the National Natural Science Foundation of China (Nos. 62371253, 52278119).
Author Contributions: Conceptualization, Yifan Gao; Data curation, Xianchao Chen; Formal analysis, Yifan Gao; Investigation, Zhanchen Chen; Methodology, Yifan Gao, Jieming Zhang and Xianchao Chen; Software, Yifan Gao; Supervision, Xianchao Chen; Validation, Zhanchen Chen; Writing–original draft, Jieming Zhang; Writing–review editing, Zhanchen Chen. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Due to the nature of this research, participants of this study did not agree for their data to be shared publicly, so supporting data is not available. We provide the author’s contact information so that readers in need can get in touch with us and learn more about relevant information.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. X. Xia et al., “GAN-based anomaly detection: A review,” Neurocomputing, vol. 493, pp. 497–535, 2022. doi: 10.1016/j.neucom.2021.12.093. [Google Scholar] [CrossRef]
2. L. Rettig et al., “Online anomaly detection over big data streams,” in Applied Data Science. Cham: Springer, 2019, pp. 289–312. [Google Scholar]
3. X. Zhou, Y. Hu, W. Liang, J. Ma, and Q. Jin, “Variational LSTM enhanced anomaly detection for industrial big data,” IEEE Trans. Industr. Inform., vol. 17, no. 5, pp. 3469–3477, 2021. doi: 10.1109/TII.2020.3022432. [Google Scholar] [CrossRef]
4. R. Ahmad, R. Wazirali, and T. Abu-Ain, “Machine learning for wireless sensor networks security: An overview of challenges and issues,” Sensors, vol. 22, no. 13, pp. 4730, Jun. 2022. doi: 10.3390/s22134730 [Google Scholar] [PubMed] [CrossRef]
5. M. A. Sheng, “Research and design of remote inspection and monitoring system for communication equipment room,” Ph.D. dissertation, Chongqing Univ., China, 2002. [Google Scholar]
6. W. F. Liu, J. P. Yang, H. Zhang, and X. P. Chen, “A method for detecting and analyzing the health status of communication equipment room,” 2018. CN201810293767.6. [Google Scholar]
7. P. Li, “Research and application of the health state assessment method of power dispatch automation equipment,” M.S. thesis, Univ. of Chinese Academy of Sciences, China, 2019. [Google Scholar]
8. T. S. Buda, B. Caglayan, and H. Assem, “Deepad: A generic framework based on deep learning for time series anomaly detection,” in Pacific-Asia Conf. Knowl. Discovery Data Min., Cham, Springer International Publishing, Jun. 2018, pp. 577–588. doi: 10.1007/978-3-319-93034-3_46. [Google Scholar] [CrossRef]
9. A. Vaswani et al., “Attention is all you need,” in NIPS’17, Adv. Neural Inf. Process. Systems, Long Beach California, USA, vol. 30, Dec. 4–9, 2017. [Google Scholar]
10. C. Yin, S. Zhang, J. Wang, and N. N. Xiong, “Anomaly detection based on convolutional recurrent autoencoder for IoT time series,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 52, no. 1, pp. 112–122, Jan. 2022. doi: 10.1109/TSMC.2020.2968516. [Google Scholar] [CrossRef]
11. C. L. Li, K. Sohn, J. Yoon, and T. Pfister, “CutPaste: Self-supervised learning for anomaly detection and localization,” in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), Jun. 19–25, 2021, pp. 9664–9674. [Google Scholar]
12. J. Xu, H. Wu, J. Wang, and M. S. Long, “Anomaly transformer: Time series anomaly detection with association discrepancy,” ICLR, Apr. 25–29, 2022. 10.48550/arXiv.2110.02642 [Google Scholar] [CrossRef]
13. Y. Zhu et al., “A survey on graph structure learning: Progress and opportunities,” IJCAI, Jul. 23–29, 2022. 10.48550/arXiv.2103.03036 [Google Scholar] [CrossRef]
14. A. Chaudhary, H. Mittal, and A. Arora, “Anomaly detection using graph neural networks,” in 2019 Int. Conf. Mach. Learning, Big Data, Cloud and Parallel Comput. (COMITCon), Faridabad, India, 2019, pp. 346–350. doi: 10.1109/COMITCon.2019.8862186. [Google Scholar] [CrossRef]
15. O. Atkinson, A. Bhardwaj, C. Englert, V. S. Ngairangbam, and M. Spannowsky, “Anomaly detection with convolutional graph neural networks,” J. High Energy Phys., vol. 2021, no. 8, pp. 1–19, 2021. doi: 10.1007/JHEP08(2021)080. [Google Scholar] [CrossRef]
16. A. Deng and B. Hoi, “Graph neural network-based anomaly detection in multivariate time series,” in AAAI-21, Vancouver, Canada, vol. 35, May 2021, pp. 4027–4035. doi: 10.1609/aaai.v35i5.16523. [Google Scholar] [CrossRef]
17. C. Ding, S. Sun, and J. Zhao, “MST-GAT: A multimodal spatial-temporal graph attention network for time series anomaly detection,” Inf. Fusion., vol. 89, pp. 527–536, Aug. 2022. doi: 10.1016/j.inffus.2022.08.011. [Google Scholar] [CrossRef]
18. L. Zhou, Q. Zeng, and B. Li, “Hybrid anomaly detection via multihead dynamic graph attention networks for multivariate time series,” IEEE Access, vol. 10, pp. 40967–40978, Apr. 2022. doi: 10.1109/ACCESS.2022.3167640. [Google Scholar] [CrossRef]
19. Y. Yu, Z. Zha, B. Jin, G. Wu, and C. X. Dong, “Graph-based anomaly detection via attention mechanism,” in ICIC 2022: Intelligent Computing Theories and Application, Xi’an, China, Aug. 7–11, 2022. pp. 401–411. [Google Scholar]
20. Y. Djenouri, A. Belhadi, G. Srivastava, J. Chun, and W. Lin, “Hybrid graph convolution neural network and branch-and-bound optimization for traffic flow forecasting,” Future Gener. Comput. Syst., vol. 139, no. 9, pp. 100–108, Oct. 2022. doi: 10.1016/j.future.2022.09.018. [Google Scholar] [CrossRef]
21. A. Ali, Y. Zhu, and M. Zakarya, “Exploiting dynamic spatio-temporal graph convolutional neural networks for citywide traffic flows prediction,” Neural Netw., vol. 145, no. 2, pp. 233–247, Nov. 2021. doi: 10.1016/j.neunet.2021.10.021 [Google Scholar] [PubMed] [CrossRef]
22. M. Ravinder et al., “Enhanced brain tumor classification using graph convolutional neural network architecture,” Sci. Rep., vol. 13, no. 1, pp. 14938, Sep. 2023. doi: 10.1038/s41598-023-41407-8 [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools