
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Road Traffic Monitoring from Aerial Images Using Template Matching and Invariant Features
1 Department of Creative Technologies, Air University, Islamabad, 46000, Pakistan
2 Department of Computer Science, College of Computer Science and Information System, Najran University, Najran, 55461, Saudi Arabia
3 Department of Information Systems, College of Computer Engineering and Sciences, Prince Sattam bin Abdulaziz University, Al-Kharj, 16273, Saudi Arabia
4 Department of Information Technology, College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, P.O. Box 84428, Riyadh, 11671, Saudi Arabia
5 Department of Computer Engineering, Tech University of Korea, Gyeonggi-do, 15073, South Korea
* Corresponding Author: Jeongmin Park. Email:
(This article belongs to the Special Issue: Advanced Artificial Intelligence and Machine Learning Frameworks for Signal and Image Processing Applications)
Computers, Materials & Continua 2024, 78(3), 3683-3701. https://doi.org/10.32604/cmc.2024.043611
Received 07 July 2023; Accepted 04 December 2023; Issue published 26 March 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Road traffic monitoring is an imperative topic widely discussed among researchers. Systems used to monitor traffic frequently rely on cameras mounted on bridges or roadsides. However, aerial images provide the flexibility to use mobile platforms to detect the location and motion of the vehicle over a larger area. To this end, different models have shown the ability to recognize and track vehicles. However, these methods are not mature enough to produce accurate results in complex road scenes. Therefore, this paper presents an algorithm that combines state-of-the-art techniques for identifying and tracking vehicles in conjunction with image bursts. The extracted frames were converted to grayscale, followed by the application of a georeferencing algorithm to embed coordinate information into the images. The masking technique eliminated irrelevant data and reduced the computational cost of the overall monitoring system. Next, Sobel edge detection combined with Canny edge detection and Hough line transform has been applied for noise reduction. After preprocessing, the blob detection algorithm helped detect the vehicles. Vehicles of varying sizes have been detected by implementing a dynamic thresholding scheme. Detection was done on the first image of every burst. Then, to track vehicles, the model of each vehicle was made to find its matches in the succeeding images using the template matching algorithm. To further improve the tracking accuracy by incorporating motion information, Scale Invariant Feature Transform (SIFT) features have been used to find the best possible match among multiple matches. An accuracy rate of 87% for detection and 80% accuracy for tracking in the A1 Motorway Netherland dataset has been achieved. For the Vehicle Aerial Imaging from Drone (VAID) dataset, an accuracy rate of 86% for detection and 78% accuracy for tracking has been achieved.Keywords
As urbanization has intensified, traffic in metropolitan areas has increased significantly, as they have highways or motorways that connect urban areas. Real-time traffic monitoring on freeways could provide advanced traffic data that could be used to make better plans and strategies for transportation in both cities and suburbs [1–3]. Traffic control and flow management demand a quick response to the current event for which traffic data must be acquired in real-time circumstances. There are several ways to collect traffic data which include stationary cameras mounted on roadsides or inductive loops. However, the limitations of these methods include the need for special equipment to be installed. Also, they cannot cover a large road network such as highways [4,5]. On the contrary, Unmanned Aerial Vehicles (UAVs) are powered aircraft that can broadcast real-time, high-resolution aerial images from remote locations at a low cost. Moreover, UAVs provide the flexibility of on-demand traffic monitoring. Methods based on aerial images must be able to deal with low frame rates, different altitudes, and camera movement to produce efficient and accurate results with a low computational cost [6,7]. Although deep learning-based methods have made a lot of progress these methods require specialized hardware along with a large amount of data for training and testing. The computational and memory requirements of deep learning models are very high. Moreover, these models are not completely understandable and controllable which makes it difficult to understand the features being learned to propose future improvements. Therefore, we proposed a novel technique that uses lightweight algorithms and can be used for different traffic scenarios with little modifications.
In this paper, a novel technique for the detection and tracking of vehicles based on aerial images of the highway is presented. For model development, two publicly available datasets, i.e., Traffic flow A1 Beekbergen Deventer and VAID were used. To reduce the overall computational cost, irrelevant data elimination has been done using the masking technique. Then, noise reduction is performed by using a combination of different techniques, i.e., Sobel edge detection to detect edges, Canny edge detection for edge refinement, and then applying the Hough line transform to detect the road lane markings. These edge-detection methods are still widely used in object-detection applications. They can detect refined edges by focusing on the minor details of the object [8,9]. The detected lines are then removed from the images leaving behind only the vehicles. The vehicles are then detected by using the blob detection technique based on the convexity, color, size, and inertia of the blobs. After vehicles were found in the image, each object found in the next frame was matched to a template using the template matching algorithm to find out where the vehicle might be. Furthermore, Scale Invariant Feature Transform (SIFT) was applied to the vehicle model to find SIFT features and its corresponding patches were found across image frames to get the best possible match and to reduce false positives. The main contribution of our proposed model includes:
• The blob detection technique has been combined with different thresholding schemes to detect vehicles of varying size and having a minute color difference between the background and vehicles.
• Template matching combined with SIFT features is used to track vehicles across bursts of frames.
• The proposed model is lightweight and computationally less expensive with the least memory requirements which makes it efficient for aerial data.
• The models provide a clear insight of all the techniques being implemented which allows the flexibility to improve further.
The paper has been divided into sections as it includes sections on related work, materials, and methodologies, which illustrate an overview of our proposed technique and a comprehensive study including data elimination, vehicle detection, matching, and finally vehicle tracking. Then, the results section presents the experiments conducted and the outcomes of the system, and finally, the paper concludes with an overall synopsis.
A variety of advanced vehicle detection and tracking analysis approaches have been studied. Table 1 presents a literature review of existing traffic monitoring models which are mainly based on image processing and machine learning techniques.
Table 1 shows that traffic monitoring is still a challenging task. There are various methods implemented using machine learning and deep learning methodologies. Deep learning models are hardware as well as computationally expensive. Therefore, we combined different machine learning models to improve the accuracy of vehicle detection and tracking. Multiple vehicle detection and tracking using UAV video frames on complex roads with different backgrounds and illumination conditions, heavy traffic, and low image resolution make it hard for the model to be as accurate as it could be.
Data has been collected from two publicly available datasets, namely, the VAID dataset and the Traffic flow A1 Beekbergen Deventer dataset. After data collection, image pre-processing techniques which include gray scale conversion and geospatial referencing have been applied followed by irrelevant data elimination techniques. After eliminating irrelevant data from the images using the mask elimination technique and Sobel, Canny, and Hough transform, vehicles were detected using the blob detection algorithm. The detected vehicles were matched across the image frames to get the possible match of each vehicle. To increase the tracking algorithm efficiency and to reduce the false positive rate for tracking purposes. The matching vehicles were also subjected to SIFT feature matching to get improved results. Fig. 1 shows the overall workflow methodology of the proposed model.
Figure 1: Flowchart demonstrating the proposed traffic surveillance model
The raw images must undergo pre-processing to remove noise, irrelevant data, and other shortcomings before passing it to the detection phase. For this, all the images were converted to a grayscale, and then georeferencing was performed.
As the original images of the dataset contain only gray shades; therefore, before detecting the vehicles all the images were converted to a gray-scale image. Each pixel’s value in a grayscale image is a single sample containing data about the intensity of the light [22]. The weighted method was used for the conversion as described in Eq. (1).
where R is Red, G is green, and B is blue.
Georeferencing is the process of assigning coordinates to geographical objects inside a frame of reference [23]. The coordinates of each image were approximated by using the Keyhole Markup Language (KML) file of the dataset. It was implemented by using the Geospatial Data Abstraction Library (GDAL) Python. The images with coordinates information embedded were saved with the .tiff extension. Georeferencing of images was performed by using Eqs. (2) and (3).
where image coordinates (i, j) are transformed into map coordinates (x, y) using (a-f) ground control points (GCPs). The result can be visualized in Fig. 2.
Figure 2: Visualization (a) gray-scale image and (b) georeferenced image
3.2 Irrelevant Data Elimination
The pre-processed data contains a lot of areas that are not useful for further processing and will also increase the computational complexity of the proposed model. The road masking technique was used to address this issue and to pass only the relevant area to the next phase, the road masking technique was used. Further, the noise was removed using a combination of the Sobel edge detector and Hough line transform.
To eliminate areas other than the road, the masking technique was used. A binary image of zero-and non-zero values is referred to as a mask. For this purpose, manual masks were generated as an image which was used for further image processing.
In the image masking technique, when a mask is applied to another binary or grayscale image of the same size, all the pixels that are zero in the mask are set to zero in the output image. The rest of the pixels remain unaltered [24]. The output image can be obtained by simply multiplying the two input images as shown in Eq. (4)
.where
Figure 3: Visualization (a) manually created image masks to eliminate irrelevant areas and (b) resultant images after irrelevant areas are removed
To remove the noise from the image, i.e., road markings and lanes Sobel edge detection, Canny edge detection, and Hough line transform techniques were applied. First of all, a median filter was applied to eradicate unnecessary details from the image A median filter is a nonlinear filter that computes each output sample as the median value of the input samples inside the window; the outcome is the middle value following the sorting of the input values as seen in Eq. (5)
.where
where the partial derivatives in the y and x directions are represented by
To find edges, the Sobel edge filter employs a horizontal and vertical filter. After applying both filters to the image, the results were merged. Eq. (8) shows the convolution filters
.For edge refinement, Canny edge detection was applied. A multi-stage method is used by the Canny edge detector to find a variety of edges in images. The false edges are suppressed by using non-maxima suppression and double thresholding methods [26]. The edges are calculated by using Eq. (9)
.The next step, after edge detection, involves the removal of road lanes and markings to get all the vehicles left behind. To detect the lines, the Hough line transform was applied. To focus on certain shapes (vehicles) inside an image, the Hough transform was utilized. Since the desired features must be provided in some parametric form, the classical Hough transform is usually used for the identification of regular curves like lines, circles, ellipses, etc. [27]. For the Hough line transform, the lines must be expressed in the polar system as shown in Eq. (10)
.For each given line values of ρ and Θ are determined. Then, any x, y point along this line fulfills Eq. (11)
.where
The steps of the noise reduction algorithm can be seen in Fig. 4.

Figure 4: The result of noise reduction algorithm (a) output of the median filter (b) Sobel edge detection (c) Canny edge detection (d) Hough line transforms for noise reduction
Before blob detection, the image frames were divided into bursts of 5 images. The first image of each burst was used for detection while tracking was done on the other 4 images. The detection of vehicles was accomplished by a blob detection algorithm [28]. The images were dilated to improve the visibility of the blobs by using Eq. (12). Dilation increases the boundaries of the regions of the foreground pixels [29]
.where
Then, the blob detection algorithm was applied with a minimum threshold value of area equal to 40 and the maximum threshold was set to 300. Blobs can be defined as a collection of pixel values that resembles a colony or as a sizable object that stands out against the background [30]. The blobs were also filtered by circularity, circularity, inertia, and distance between the blobs. The output of the blob detection algorithm is shown in Fig. 5.
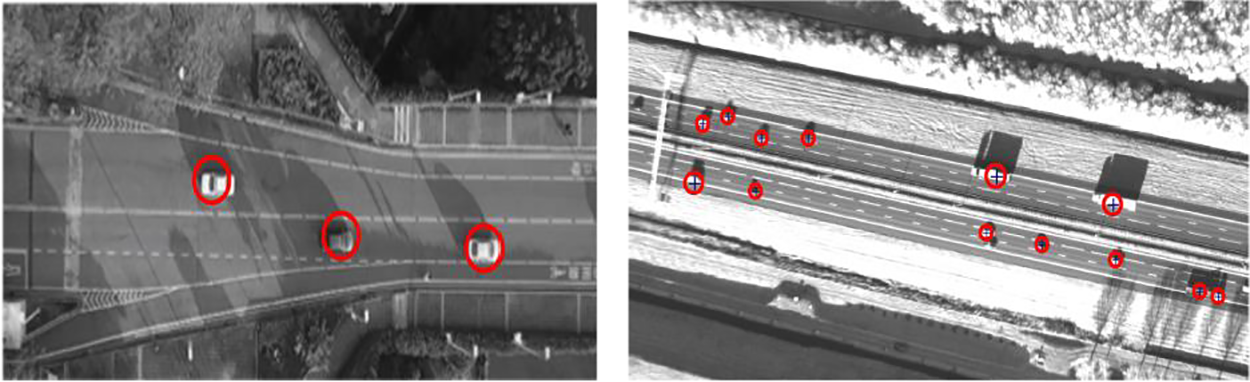
Figure 5: Vehicle detection using a blob detection algorithm
Before performing vehicle tracking, the vehicles detected in the burst’s initial image are geometrically set up. It should be noted that not all cars can be designed geometrically. The position of the vehicle is determined using the explicit shape models, which are then utilized in template matching to find the possible match in the other two images of the burst. The template matching process comprises panning the template across the entire image and assessing how much it resembles the covered window in the image. To evaluate the similarity, the normalized correlation coefficient was used as shown in Eq. (13)
.The matrix
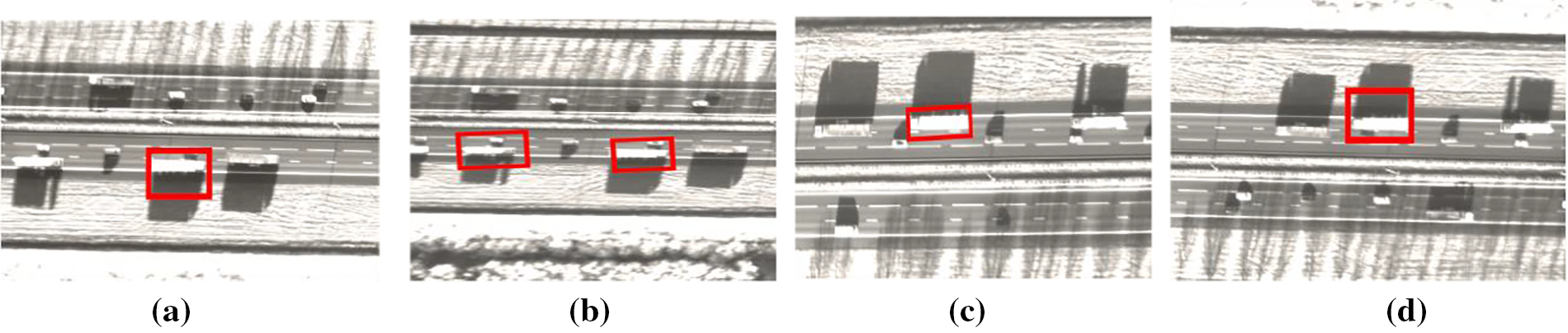
Figure 6: Vehicle tracking based on template matching algorithm across image bursts (a) Frame 1 (b) Frame 2 (c) Frame 3 and (d) Frame 4
The output of the template matching algorithm contains more than one matching for a large number of vehicles. To improve the accuracy and to get only one best-match Scale, Invariant Feature Transform (SIFT) features were extracted for motion estimation and filtering. To get a reliable match of the object within the images, SIFT was designed to extract highly identifiable invariant features from image bursts [31]. The SIFT method primarily involves four phases.
3.5.1 Scale-Space Extrema Prediction
The difference of Gaussians used by the SIFT method approximates the Laplacian of Gaussian. The feature points are found by using the difference of Gaussian (DoG) at different scales of the image to look for local maxima. If the input image is
When an image is blurred with two different
where
To acquire more precise findings, possible key point locations must be revised after being discovered. They expanded the scale space using the Taylor series (Eq. 16) to locate the extrema with more accuracy, and if the intensity at these extrema is less than a certain threshold, it is rejected
.Now, each key point has an orientation given to it to achieve image rotation invariance. Depending on the scale, a neighborhood is selected around the keypoint position, and the gradient’s amplitude and direction are determined as given in Eqs. (17) and (18)
.where
Around the key point, a 16 × 16 neighborhood was taken. It was divided into 16 subblocks of 4 × 4 size each. An 8-bin orientation histogram was produced for each sub-block. There are 128 possible bin values in all. To create a key point descriptor, it can be visualized as a vector.
Keypoint between two images are matched by measuring the Euclidean distance as calculated in Eq. (19). A thresholding scheme described in Eq. (20) is used to get the best possible match
.where
The SIFT feature matching can be visualized in Fig. 7.
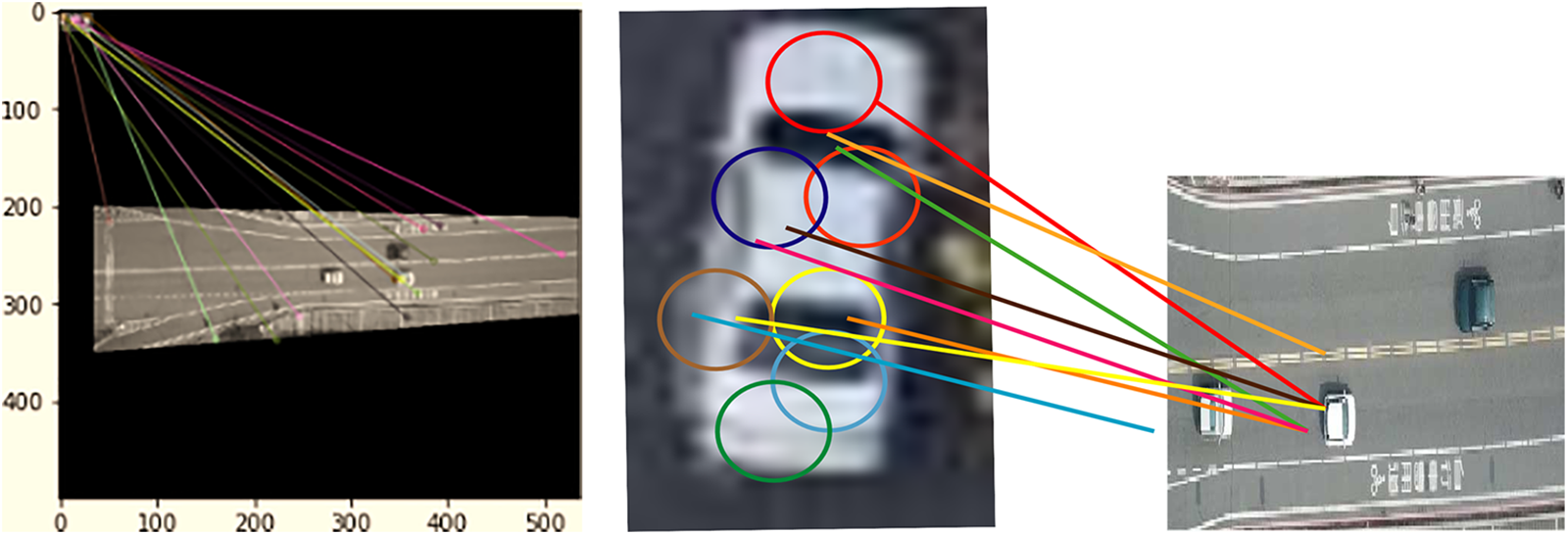
Figure 7: SIFT feature matching for vehicle tracking
The Traffic flow A1 Beeksbergen Deventer dataset has been collected along with geolocation, latitude, and longitude. Each video contains 2000 frames which were extracted in .png format. It has been created to monitor the traffic on Highway A1 (91.7 km) in the Netherlands. 2000 image frames were used to evaluate the proposed model.
The Vehicle Aerial Imaging from Drone (VAID) dataset is based on 5985 aerial images taken from drones at different angles and illumination conditions in Taiwan. All the images have a resolution of 1137 × 640 pixels in .jpg format [32]. The frames from both datasets were divided into bursts of 5 images. Detection was done on the very first image of each burst whereas the tracking was done in the succeeding four images.
4.2 Experimental Settings and Results
The system was trained and assessed using a PC with an Intel Core i7 and 64-bit Windows 10, and Python (3.7). The computer has a 5 Giga Hertz (GHz) CPU and 16 GB of Random Access Memory (RAM). The effectiveness of the system is tested by using the above-mentioned datasets.
4.2.1 Experiment I: Vehicle Count and Type Analysis over Image Frames
An analysis of both datasets with respect to vehicle color and vehicle count in each image frame is presented. It helps to select and improve appropriate light-weight method to detect vehicles as per the color difference from the background and number of vehicles in each frame with an acceptable precision rate. Fig. 8 illustrates vehicle color type and vehicle count of the dataset Traffic flow A1 Beekbergen Deventer.
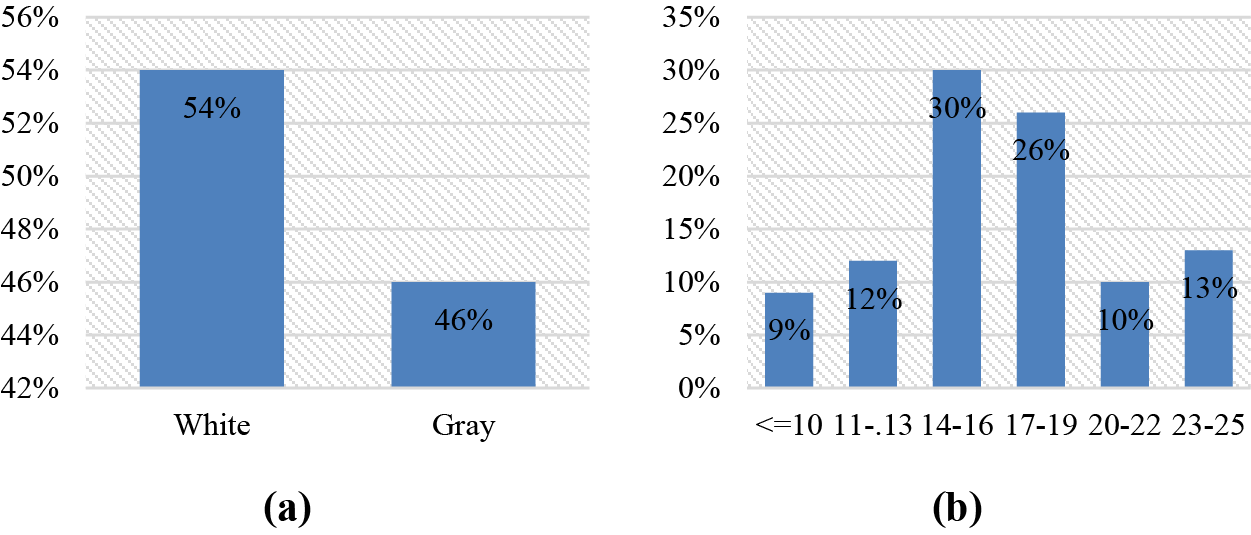
Figure 8: Distribution of traffic flow A1 Beekbergen Deventer (a) vehicle color type (b) vehicles per image
4.2.2 Experiment II: Comprehensive Analysis of Selected Datasets
Both the Traffic Flow A1 Beekbergen Deventer and the VAID datasets have been used in the experiment to test the outcomes in terms of true positives, false positives, false negatives, precision, recall, and F1-scores. False positives are non-vehicle detections, true positives are the number of vehicles marked, and false negatives are missed vehicle detections. For tracking, the number of successfully tracked cars is known as the true positives, the number of inaccurately tracked vehicles is known as the false positives, and the number of detected but untracked vehicles is known as the false negatives (vehicles not tracked due to occlusion are not counted as false positives. Table 2 shows the outcomes for the detection algorithm over both the Traffic flow A1 Beekbergen Deventer and VAID datasets.
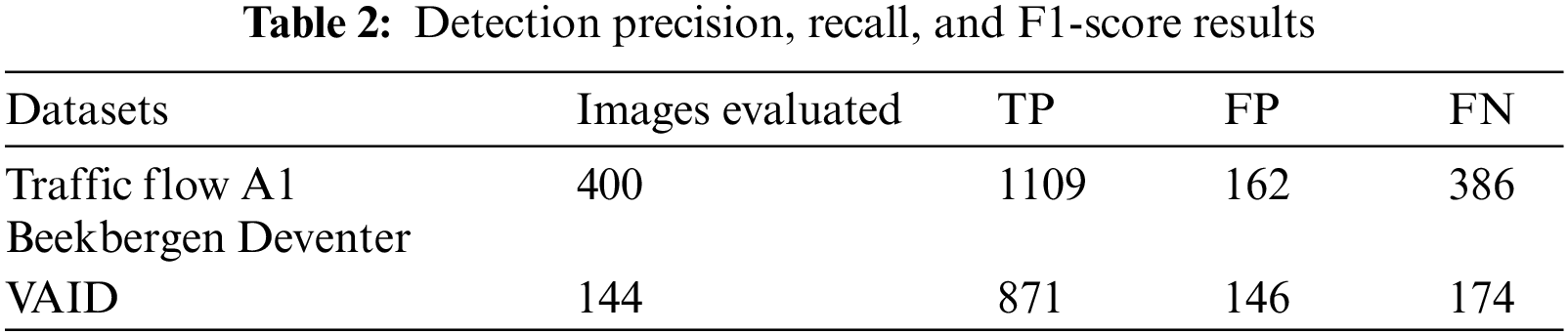
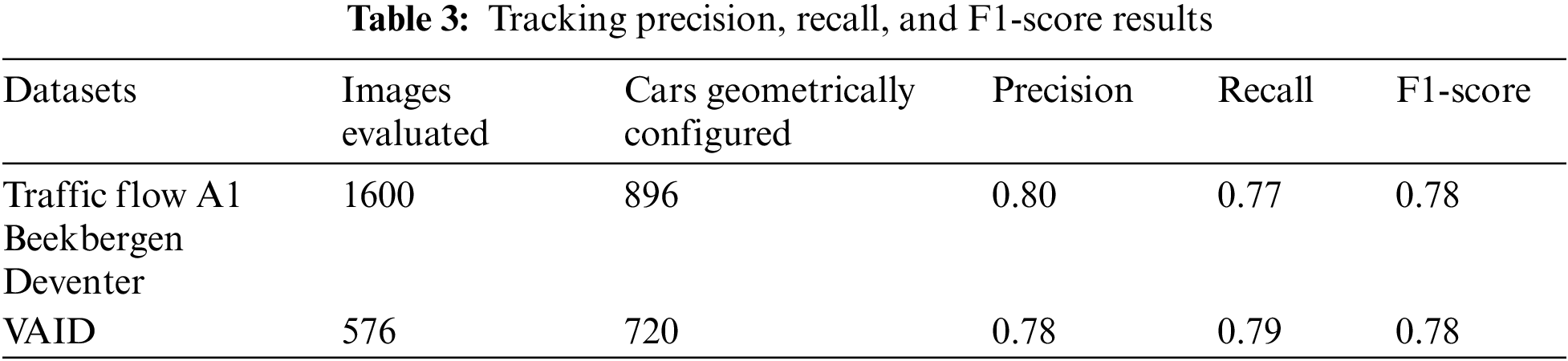
Table 3 represents the results of the tracking algorithm over both datasets.
4.2.3 Experiment III: Comparison with Other State-of-the-Art Models
In this experiment, we compared our model with state-of-the-art models. For the region of interest extraction from the images, frame differencing or background image differencing techniques produce reasonable results, but these techniques are not flexible and do not produce consistent results on other datasets. Moreover, differencing methods are not available for stationary vehicles. Also, these techniques increase the computational and memory requirements of the overall model. For vehicle detection, a comparison of k-mean clustering and blob detection was used. K-mean clustering is sensitive to noise which hinders the accuracy of the model. Blob detection implements thresholding criteria which helps to overlook any noise left behind after the pre-processing phase. Template matching is the simplest and most commonly used tracking algorithm. but evaluating its preciseness, it results in more than one match of a car with a low threshold value or no match if the threshold value for the matching score increases. Therefore, to get reasonable results for matching and to further reduce the number of false positives, a combination of template matching with Histogram of Gradient (HOG) and SIFT was evaluated. HOG was not suitable for the motion configuration of very small-sized vehicles or bikes. However, this limitation can be minimized by using invariant features i.e., SIFT algorithm. However, the Convolutional Neural Network (CNN) has a better preciseness rate than our proposed method, but its computational time and memory consumption have significantly increased. Table 4 presents a comparison of our proposed model results over Traffic flow A1 Beekbergen Deventer with the other state-of-the-art systems.
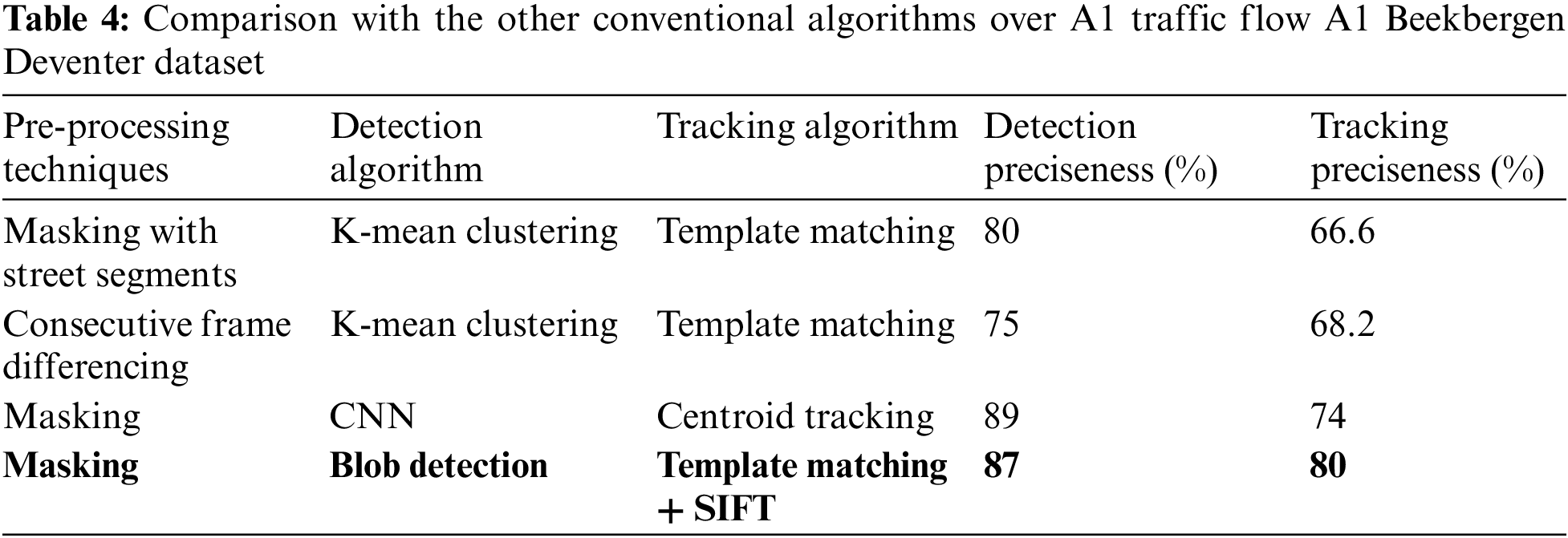
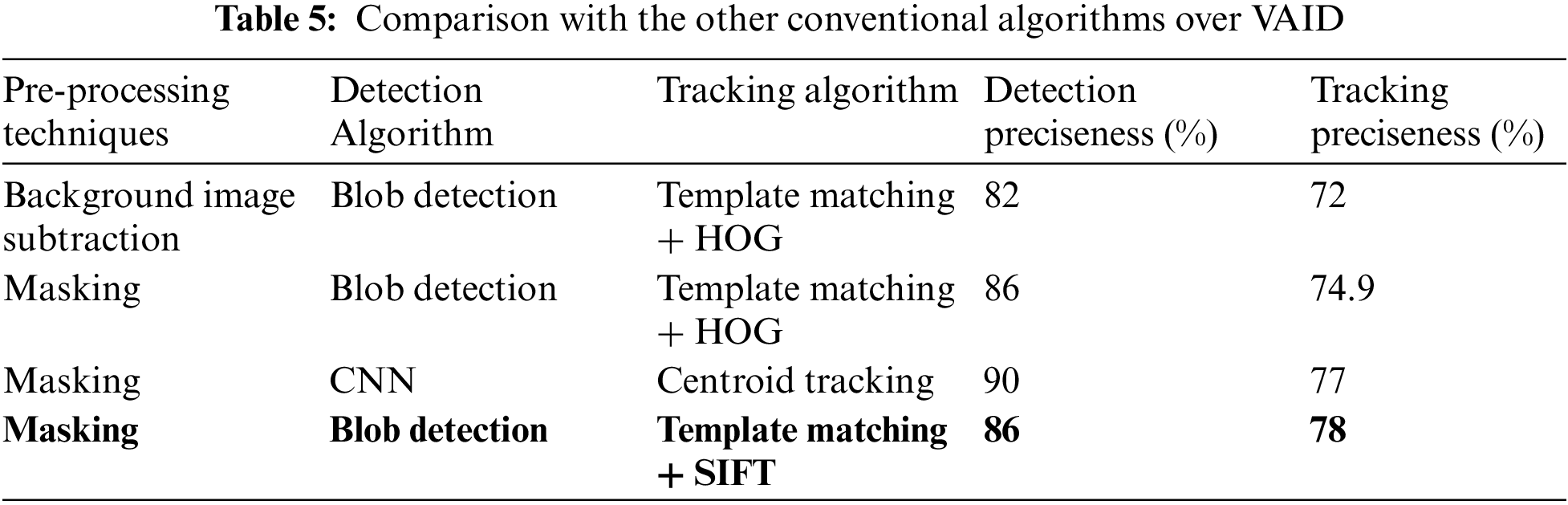
Table 5 presents a comparison of VAID dataset results with other techniques. It can be seen that our proposed model tracks the vehicle more precisely when compared with other state-of-the-art algorithms.
The proposed traffic monitoring model is based on masking, noise reduction, blob detection for pattern recognition, and template matching combined with SIFT for vehicle tracking. To evaluate the performance of the proposed model, two datasets, namely, the traffic flow A1 Beekbergen Deventer dataset and VAID were used. To remove the irrelevant area and noise masking a state-of-the-art technique was proposed along with the Hough line transform method. For the tracking of vehicles, the research built and employed car models in template matching. Besides, SIFT, features helped get the best possible match for each vehicle, which makes the results more accurate. Future work includes methods to deal with different illumination conditions for higher accuracy.
Acknowledgement: The authors are thankful to Princess Nourah bint Abdulrahman University Researchers Supporting Project Number (PNURSP2023R54), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Funding Statement: This work was supported by a grant from the Basic Science Research Program through the National Research Foundation (NRF) (2021R1F1A1063634) funded by the Ministry of Science and ICT (MSIT), Republic of Korea. The authors are thankful to the Deanship of Scientific Research at Najran University for funding this work under the Research Group Funding Program Grant Code (NU/GP/SERC/13/30). Also, the authors are thankful to Prince Satam bin Abdulaziz University for supporting this study via funding from Prince Satam bin Abdulaziz University project number (PSAU/2024/R/1445). This work was also supported by Princess Nourah bint Abdulrahman University Researchers Supporting Project Number (PNURSP2023R54), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Author Contributions: Study conception and design: Asifa Mehmood Qureshi, Jeongmin Park, data collection: Mohammed Alonazi; analysis and interpretation of results: Asifa Mehmood Qureshi, Naif Al Mudawi and Samia Allaoua Chelloug; draft manuscript preparation: Asifa Mehmood Qureshi. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: All publicly available datasets are used in the study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. S. H. Yu, J. W. Hsieh, Y. S. Chen, and W. F. Hu, “An automatic traffic surveillance system for vehicle tracking and classification,” Lect. Notes Comput. Sci., vol. 2749, pp. 379–386, 2003. doi: 10.1007/3-540-45103-X. [Google Scholar] [CrossRef]
2. A. Azim and O. Aycard, “Detection, classification and tracking of moving objects in a 3D environment,” in 2012 IEEE Intell. Vehicles Symp., Alcala de Henares, Spain, 2012, pp. 802–807. [Google Scholar]
3. A. Ahmed, A. Jalal, and K. Kim, “Multi-objects detection and segmentation for scene understanding based on Texton forest and kernel sliding perceptron,” J. Electr. Eng. Technol., vol. 16, no. 2, pp. 1143–1150, 2021. doi: 10.1007/s42835-020-00650-z. [Google Scholar] [CrossRef]
4. A. Angel, M. Hickman, P. Mirchandani, and D. Chandnani, “Methods of analyzing traffic imagery collected from aerial platforms,” IEEE. Trans. Intell. Transp. Syst., vol. 4, no. 2, pp. 99–107, 2003. doi: 10.1109/TITS.2003.821208. [Google Scholar] [CrossRef]
5. M. Schreuder, S. P. Hoogendoorn, H. J. van Zulyen, B. Gorte, and G. Vosselman, “Traffic data collection from aerial imagery,” IEEE. Trans. Intell. Transp., vol. 1, pp. 779–784, 2003. doi: 10.1109/ITSC.2003.1252056. [Google Scholar] [CrossRef]
6. R. S. de Moraes and E. P. de Freitas, “Multi-UAV based crowd monitoring system,” IEEE. Trans. Aero. Electron. Syst., vol. 56, no. 2, pp. 1332–1345, Apr. 2020. doi: 10.1109/TAES.2019.2952420. [Google Scholar] [CrossRef]
7. M. Elloumi, R. Dhaou, B. Escrig, H. Idoudi, and L. A. Saidane, “Monitoring road traffic with a UAV-based system,” in IEEE Wirel. Commun. Netw. Conf. (WCNC), Barcelona, Spain, Jun. 2018, pp. 1–6. [Google Scholar]
8. D. R. D. Varma and R. Priyanka, “Performance monitoring of novel iris detection system using sobel algorithm in comparison with canny algorithm by minimizing the mean square error,” in 2022 3rd Int. Conf. Intell. Eng. Manage. (ICIEM), London, UK, 2022, pp. 509–512. [Google Scholar]
9. J. S. Yadav and P. Shyamala Bharathi, “Edge detection of images using prewitt algorithm comparing with sobel algorithm to improve accuracy,” in 2022 3rd Int. Conf. Intell. Eng. Manage. (ICIEM), London, UK, 2022, pp. 351–355. [Google Scholar]
10. M. Shafiq, Z. Tian, A. K. Bashir, X. Du, and M. Guizani, “CorrAUC: A malicious Bot-IoT traffic detection method in IoT network using machine-learning techniques,” IEEE Internet Things J., vol. 8, no. 5, pp. 3242–3254, 2021. doi: 10.1109/JIOT.2020.3002255. [Google Scholar] [CrossRef]
11. S. Hinz, D. Lenhart, and J. Leitloff, “Detection and tracking of vehicles in low framerate aerial image sequences,” Image, vol. 24, pp. 1–6, 2006. [Google Scholar]
12. J. Gleason, A. V. Nefian, X. Bouyssounousse, T. Fong, and G. Bebis, “Vehicle detection from aerial imagery,” in 2011 IEEE Int. Conf. Robot. Autom., Shanghai, China, 2011, pp. 2065–2070. [Google Scholar]
13. M. Poostchi, K. Palaniappan, and G. Seetharaman, “Spatial pyramid context-aware moving vehicle detection and tracking in urban aerial imagery,” in 2017 14th IEEE Int. Conf. Adv. Video and Signal Based Surveill. (AVSS), Lecce, Italy, 2017, pp. 1–6. [Google Scholar]
14. K. V. Najiya and M. Archana, “UAV video processing for traffic surveillence with enhanced vehicle detection,” in 2018 Second Int. Conf. Inven. Commun. Comput. Technol. (ICICCT), Coimbatore, India, 2018, pp. 662–668. [Google Scholar]
15. S. Drouyer and C. Franchis, “Highway traffic monitoring on medium resolution satellite images,” in IGARSS 2019-2019 IEEE Int. Geosci. Remote Sens. Symp., Yokohama, Japan, 2019, pp. 1228–1231. [Google Scholar]
16. D. Sitaram, N. Padmanabha, S. Supriya, and S. Shibani, “Still image processing techniques for intelligent traffic monitoring,” in 2015 Third Int. Conf. Image Inform. Process. (ICIIP), Waknaghat, India, 2015, pp. 252–255. [Google Scholar]
17. R. J. López-Sastre, C. Herranz-Perdiguero, R. Guerrero-Gómez-olmedo, D. Oñoro-Rubio, and S. Maldonado-Bascón, “Boosting multi-vehicle tracking with a joint object detection and viewpoint estimation sensor,” Sens., vol. 19, no. 19, pp. 1–24, 2019. [Google Scholar]
18. K. Mu, F. Hui, and X. Zhao, “Multiple vehicle detection and tracking in highway traffic surveillance video based on sift feature matching,” J. Inform. Process. Syst., vol. 12, no. 2, pp. 183–195, 2016. doi: 10.3745/JIPS.02.0040. [Google Scholar] [CrossRef]
19. M. Betke, E. Haritaoglu, and L. S. Davis, “Real-time multiple vehicle detection and tracking from a moving vehicle,” Mach. Vision Appl., vol. 12, no. 2, pp. 69–83, 2000. doi: 10.1007/s001380050126. [Google Scholar] [CrossRef]
20. A. N. Rajagopalan and R. Chellappa, “Vehicle detection and tracking in video,” in Proc. 2000 Int. Conf. Image Process., Vancouver, Canada, 2000, vol. 1, pp. 351–354. [Google Scholar]
21. M. F. Alotaibi, M. Omri, S. Abdel-Khalek, E. Khalil, and R. F. Mansour, “Computational intelligence-based harmony search algorithm for real-time object detection and tracking in video surveillance systems,” Mathematics., vol. 10, no. 5, pp. 733, Feb. 2022. doi: 10.3390/math10050733. [Google Scholar] [CrossRef]
22. C. Saravanan, “Color image to grayscale image conversion,” in 2nd Int. Conf. Comput. Eng. Appl. ICCEA, Bali, Indonesia, 2010, vol. 2, pp. 196–199. [Google Scholar]
23. A. Hackeloeer, K. Klasing, J. M. Krisp, and L. Meng, “Georeferencing: A review of methods and applications,” Annals GIS., vol. 1, no. 20, pp. 61–69, 2014. doi: 10.1080/19475683.2013.868826. [Google Scholar] [CrossRef]
24. S. Sen, M. Dhar, and S. Banerjee, “Implementation of human action recognition using image parsing techniques,” in Emerg. Trends in Electron. Dev. Comput. Tech., Kolkata, India, Jul. 2018, pp. 1–6. [Google Scholar]
25. A. A. Kumar, N. Lal, and R. N. Kumar, “A comparative study of various filtering techniques,” in 2021 5th Int. Conf. Trends in Electron. Inform. (ICOEI), Tirunelveli, India, Jun. 2021, pp. 26–31. [Google Scholar]
26. L. Yuan and X. Xu, “Adaptive image edge detection algorithm based on canny operator,” in 2015 4th Int. Conf. Adv. Inform. Technol. Sens. Appl. (AITS), Harbin, China, Feb. 2016, pp. 28–31. [Google Scholar]
27. D. H. H. Tingting, “Transmission line extraction method based on Hough transform,” in Proc. 2015 27th Chin. Control Decis. Conf. CCDC 2015, Qingdao, China, Jul. 2015, pp. 4892–4895. [Google Scholar]
28. X. Luo, Y. Wang, B. Cai, and Z. Li, “Moving object detection in traffic surveillance video: New MOD-AT method based on adaptive threshold,” ISPRS Int. J. Geo-Inf., vol. 10, no. 11, pp. 742, Nov. 2021. doi: 10.3390/ijgi10110742. [Google Scholar] [CrossRef]
29. A. Soni and A. Rai, “Automatic colon malignancy recognition using sobel & morphological dilation,” in 2020 Third Int. Conf. Multimed. Process., Commun. & Inform. Technol. (MPCIT), Shivamogga, India, Dec. 2020, pp. 63–68. [Google Scholar]
30. A. Goshtasby, “Template matching in rotated images,” IEEE. Trans. Pattern. Anal., vol. 7, no. 3, pp. 338–344, 1985. doi: 10.1109/TPAMI.1985.4767663. [Google Scholar] [PubMed] [CrossRef]
31. S. Battiato, G. Gallo, G. Puglisi, and S. Scellato, “SIFT features tracking for video stabilization,” in 14th Int. Conf. Image Anal. Process. (ICIAP), Modena, Italy, 2007, pp. 825–830. [Google Scholar]
32. H. Y. Lin, K. C. Tu, and C. Y. Li, “VAID: An aerial image dataset for vehicle detection and classification,” IEEE Access, vol. 8, pp. 212209–212219, 2020. doi: 10.1109/ACCESS.2020.3040290. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools