
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

MCWOA Scheduler: Modified Chimp-Whale Optimization Algorithm for Task Scheduling in Cloud Computing
1 School of Computer Science and Engineering, Vellore Institute of Technology, Chennai, 600127, India
2 Center for Cyber Physical Systems, School of Computer Science and Engineering, Vellore Institute of Technology, Chennai, 600127, India
* Corresponding Author: Pradeep Krishnadoss. Email:
Computers, Materials & Continua 2024, 78(2), 2593-2616. https://doi.org/10.32604/cmc.2024.046304
Received 26 September 2023; Accepted 14 December 2023; Issue published 27 February 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Cloud computing provides a diverse and adaptable resource pool over the internet, allowing users to tap into various resources as needed. It has been seen as a robust solution to relevant challenges. A significant delay can hamper the performance of IoT-enabled cloud platforms. However, efficient task scheduling can lower the cloud infrastructure’s energy consumption, thus maximizing the service provider’s revenue by decreasing user job processing times. The proposed Modified Chimp-Whale Optimization Algorithm called Modified Chimp-Whale Optimization Algorithm (MCWOA), combines elements of the Chimp Optimization Algorithm (COA) and the Whale Optimization Algorithm (WOA). To enhance MCWOA’s identification precision, the Sobol sequence is used in the population initialization phase, ensuring an even distribution of the population across the solution space. Moreover, the traditional MCWOA’s local search capabilities are augmented by incorporating the whale optimization algorithm’s bubble-net hunting and random search mechanisms into MCWOA’s position-updating process. This study demonstrates the effectiveness of the proposed approach using a two-story rigid frame and a simply supported beam model. Simulated outcomes reveal that the new method outperforms the original MCWOA, especially in multi-damage detection scenarios. MCWOA excels in avoiding false positives and enhancing computational speed, making it an optimal choice for structural damage detection. The efficiency of the proposed MCWOA is assessed against metrics such as energy usage, computational expense, task duration, and delay. The simulated data indicates that the new MCWOA outpaces other methods across all metrics. The study also references the Whale Optimization Algorithm (WOA), Chimp Algorithm (CA), Ant Lion Optimizer (ALO), Genetic Algorithm (GA) and Grey Wolf Optimizer (GWO).Keywords
Cloud computing has revolutionized the way businesses and individuals’ access and utilize computational resources. It offers a diverse and adaptable resource pool accessible over the internet, providing users with the flexibility to tap into a wide array of resources as per their requirements. This paradigm shift in computing has been perceived as a robust solution to tackle an array of challenges in a world that demands scalability, efficiency, and accessibility [1–4]. In the context of cloud computing, Service Level Agreements (SLAs) play a pivotal role in ensuring customer satisfaction and maintaining a competitive edge. SLAs are contractual agreements that delineate the quality of service expected from the service providers, establishing a binding commitment between the provider and the customer. Within this framework, two critical parameters that SLAs predominantly focus on are makespan, which is the time taken to complete a particular service requested by a user, and energy consumption associated with executing the process, along with latency, which signifies the waiting time associated with each task. It is paramount for these service providers to offer superior service quality to maintain customer loyalty and uphold their reputation in the highly competitive cloud computing environment [5–9].
Cloud computing, although a promising technology, faces several inherent challenges, and one of the most prominent among them is the scheduling of tasks. Task scheduling in cloud computing is a complex and computationally intensive problem that falls under the category of NP-hard problems [10–13]. The objective is to optimally allocate computing resources to execute multiple tasks while meeting the stringent SLAs and minimizing operational costs. This is where the realm of meta-heuristic algorithms comes into play. These algorithms are employed to address the intricate task scheduling challenges in the cloud environment. Meta-heuristic algorithms are optimization techniques that guide the search for an optimal solution by iteratively exploring and exploiting the search space. They have been widely adopted due to their adaptability and effectiveness in handling complex and dynamic environments.
Each of these algorithms has its advantages and disadvantages, and they may encounter unique challenges depending on the problem characteristics and the optimization objectives. Some of the challenges faced by these algorithms in the context of task scheduling in cloud computing include:
1. Balancing the trade-off between exploration and exploitation which involves avoiding being trapped in local optima while also exploiting promising regions of the search space.
2. Adapting to the dynamic and uncertain nature of cloud environments: This requires the algorithms to adjust to changes in resource availability, task arrival rate, network latency, and other factors that influence the scheduling process.
3. Handling the multi-objective and multi-constrained nature of task scheduling problems: This entails optimizing multiple conflicting objectives (such as makespan, cost, energy consumption, reliability, etc.) while satisfying various constraints (such as deadlines, budget, security levels, etc.).
In light of these challenges, this research paper proposes a novel solution to enhance task scheduling in cloud computing. Moreover, the motivation behind developing the Modified Chimp-Whale Optimization Algorithm (MCWOA) arises from the common goal of task-scheduling algorithms to enhance cloud computing performance. Existing algorithms, particularly those categorized as deadline-sensitive task-schedulers, face limitations in selecting parameters like makespan, energy consumption, and latency due to their time-sensitive nature. To overcome the challenges of complex search spaces and time consumption associated with current algorithms, MCWOA is introduced. The proposed algorithm, known as the Modified Chimp-Whale Optimization Algorithm (MCWOA), combines elements of the Chimp Optimization Algorithm (COA) and the Whale Optimization Algorithm (WOA) to address the intricate task scheduling problems. MCWOA aims to strike an optimal balance by minimizing the triad of key metrics: makespan, energy consumption, and latency. Unlike rudimentary heuristics, MCWOA leverages a fusion of nature-inspired tactics and computational intelligence, making it a tailor-made solution for the intricate demands of contemporary cloud ecosystems. In the subsequent sections, this paper provides a detailed exposition of MCWOA, explaining its intricate design and its potent ability to recalibrate the paradigms of task scheduling in cloud computing. Furthermore, to ensure the efficient initialization of the population, MCWOA employs the Sobol sequence, which ensures an even distribution of the population across the solution space. The use of this sequence contributes to the algorithm’s ability to explore the search space effectively from the outset. In the following sections of this research, we will present the detailed mechanics of MCWOA and the results of comprehensive experimental evaluations. The comparative analysis against benchmark algorithms will provide insights into the efficiency and effectiveness of MCWOA. This paper aims to establish MCWOA not as just another alternative, but as an efficient algorithm that can yield optimal solutions in the context of task scheduling for cloud computing environments. Through rigorous testing and thorough evaluations, the contributions of this article become apparent, as it endeavors to advance the state of the art in cloud computing task scheduling. Therefore, the following are some of the contributions that this article aims to provide:
1. The introduction of the Modified Chimp-Whale Optimization Algorithm (MCWOA) is the main contribution of this research. This novel algorithm offers a strong answer to the challenging task scheduling problems in cloud computing by fusing components of the Whale Optimization Algorithm (WOA) and the Chimp Optimization Algorithm (COA). The goal of MCWOA is to provide a unique method that surpasses conventional heuristics by finding the ideal compromise between makespan, energy consumption, and latency.
2. Moreover, the Modified Chimp-Whale Optimization Algorithm (MCWOA) is meticulously designed to function as a deadline-sensitive task scheduler, emphasizing the efficiency of task processing and the generation of an optimal solution set within minimal time constraints. In its role as a deadline-sensitive scheduler, MCWOA prioritizes the timely execution of tasks, aiming to fulfill predefined deadlines while simultaneously optimizing critical performance parameters such as makespan, energy consumption, and latency.
3. By using the features from WOA and COA, the proposed algorithm is able to navigate and exploit diverse regions of the solution space and produce a better optimized solution-set. In addition to this, MCWOA aims to overcome the local minimal trap, a common concern in optimization problems where algorithms may get stuck in suboptimal solutions.
4. By offering a thorough analysis of MCWOA and contrasting it with benchmark algorithms such as the Whale Optimization Algorithm (WOA), Chimp Algorithm (CA), Ant Lion Optimizer (ALO), Genetic Algorithm (GA), and Grey Wolf Optimizer (GWO), the research paper advances the field. The comparative analysis demonstrates MCWOA’s superiority and verifies its efficacy and efficiency in resolving cloud computing task scheduling issues. Thus, the study provides insightful information about the algorithm’s functionality and potential applications in real-world settings.
The subsequent portions of this document are structured as follows: Section 2delves into a review of prior studies and literature. Section 3 is dedicated to the presentation and discussion of the newly proposed algorithm. In Section 4, a recap of the experimental results is provided, and Section 5 rounds off the document with conclusions and directions for future research.
Several research endeavors have been conducted to enhance the efficiency of resource consumption and task scheduling in cloud computing environments. All of these efforts have focused on optimization, aiming to find the ideal resource configuration that minimizes Quality of Services (QoS) parameters and enhances task scheduling performance while considering various workload constraints like budget and deadlines. While progress has been made in resource scheduling research, the anticipated results have not been fully achieved. This section provides an overview of the most commonly used multi-objective scheduling strategies and reviews the relevant literature in our research domain.
To address issues of load balancing, energy consumption, latency, and computational costs in the cloud environment, the Dueling Deep Q-Learning Based Chaotic Levy Flight (DDQ-CLF) algorithm proposed in [14] is used in a secure healthcare system with IoT, fog, and cloud tiers for effective data processing and secure transmission, evaluated for factors like energy consumption, latency, and network usage. A new hybrid algorithm merges a Chaotic Grasshopper Optimization Algorithm (CGOA) with a genetic algorithm (GA) for Fog-tier scheduling and is used in [15] to overcome challenges using chaos theory and opposition-based learning principles. Tested on the Google trace dataset for efficiency. The Hybrid Fuzzy Archimedes (HFA) algorithm introduced in [16] optimizes Mobile Edge Computing (MEC) node selection for cost and security. It combines with LGBM and XGBoost to reduce energy usage and latency in task scheduling. HFA refines Archimedes by introducing fuzzy factors and a normalized objective function, prioritizing security and cost efficiency. Light Gradient Boosting Machine LGBM-XGBoost minimizes energy and latency, considering makespan and energy metrics. The approach’s effectiveness is evaluated using resource usage, completion time, rate, and Computation Workload Completion Rate.
A layer fit algorithm is presented for task distribution between fog and cloud based on priorities in [17]. It combines with Modified Harris-Hawks Optimization (MHHO) to minimize makespan, task cost, and power usage while enhancing resource efficiency in both layers. Simulations using iFogSim reveal that MHHO surpasses traditional algorithms such as Ant Colony Optimization (ACO), Harris-Hawks Optimization (HHO), Firefly Algorithm (FA), and Particle Swarm Optimization (PSO) in energy, cost, and makespan. The Enhancing Container-Based Task Scheduling algorithm (ECBTSA-IRA) algorithm in [18] balances performance, cost, and energy efficiency. It assesses workloads for scheduling and shows task interdependencies using a Directed acyclic graph (DAG). Workloads are prioritized by an efficiency factor, which divides them up among processing nodes (FN or cloud) according to schedule duration, cost, and energy. Furthermore, Markov Decision Process (MDP)-based reinforcement learning finds the best resources.
The study proposed in [19] focuses on a resource-constrained fog system managing diverse real-time tasks. It introduces two modules: Task Classification and Buffering (TCB) for task categorization and buffering, and Task Offloading and Optimal Resource Allocation (TOORA) for efficient task delegation and resource allocation. It also presents a new algorithm, Whale Optimized Resource Allocation (WORA), compared to established models for performance evaluation. EPRAM, designed in [20] is for healthcare applications in Fog environments, which addresses resource management challenges. EPRAM integrates real-time resource allocation and a prediction algorithm. It comprises three modules: Resource Allocation Module (RAM), Effective Prediction Module (EPM), and Data Preprocessing Module (DPM). EPM employs PNN for forecasting, like predicting heart attacks based on IoT user data to minimize latency and enhance QoS metrics. The HHOLS algorithm proposed in [21] is an energy-focused metaheuristic that aims to enhance Task Scheduling in Fog Computing (TSFC) for improved Industrial Internet of Things (IIoT) Quality of Service (QoS). It addresses complex challenges through techniques like normalization and scaling. HHOLS is compared to other metaheuristics for performance evaluation.
A heuristic load balancing strategy is presented in [22] to improve the efficiency of cloud services by reducing makespan and task completion time. This dynamic task allocation approach takes energy efficiency, latency, and bandwidth into account for networks. Experiments with synthetic data are conducted to compare it with a queue-based approach, and the results show significant improvements in terms of energy, cost, and time savings in task scheduling when compared to current approaches. The study presents a task offloading strategy for wearable computing in [23], taking into account task requirements, mobility, cloud and network resources, and user payment patterns. Experimental results demonstrate significant improvements in many metrics when compared to baseline methods.
A smart edge-cloud model for efficient data processing is introduced in [24]. To process data between the cloud and IoT devices, it makes use of an edge node close to IoT nodes. A Deep Q-Network (DQN) minimizes makespan and energy by optimizing workflow scheduling in the device-edge-cloud continuum. ELECT is verified by a SHM service simulation in remote areas. The outcomes demonstrate how well ELECT reduced communication, energy, and makespan costs. The study done in [25], introduces a Multi-Objectives Particle Swarm Optimization (MOPSO) algorithm, incorporating a non-dominance sort, aimed at addressing the scheduling issues of time-sensitive business processes with several conflicting objectives. The algorithm endeavors to optimize three conflicting factors: makespan (total execution time), financial costs, and energy usage, all while respecting the budgetary and temporal restrictions of the business process. The work carried out in [26] proposed a framework called Subspace Clustering using Evolutionary algorithm, Off-Spring generation and Multi-Objective Optimization (SCEOMOO) to find the optimal subspace clusters.
Based on the conducted study, it can be deduced that all task-scheduling algorithms share a common goal, which is to improve the performance of cloud computing environments. To achieve this objective, these algorithms consider various parameters. However, when it comes to selecting specific parameters such as makespan, energy consumption, and latency, the options are limited. This limitation arises from the time-sensitive nature of these parameters, categorizing such algorithms as deadline-sensitive task-schedulers. In simpler terms, these algorithms aim to execute requested tasks within an expected time frame, indicating that latency should be minimized for each task, and energy consumption should be kept to a minimum. While there are several algorithms designed for deadline-sensitive task scheduling, they often involve complex search space mechanisms that consume a significant amount of time to identify the optimal results. To address this challenge, a novel algorithm is introduced to achieve the same optimal results but with reduced time consumption. This enhanced task-scheduling algorithm takes into account the minimization of makespan, energy consumption, and latency from various perspectives, including ecological and economic considerations. The algorithm, known as the Modified Chimp-Whale Optimization Algorithm (MCWOA), focuses on optimizing task scheduling and resource allocation among virtual machines in the cloud environment. MCWOA builds upon the Chimp Optimization Algorithm (COA) and the Whale Optimization Algorithm (WOA) to streamline the time and energy constraints, effectively fulfilling the intended objectives. Therefore, the algorithm is aptly named the Modified Chimp-Whale Optimization Algorithm.
The subsequent sections of this research paper are structured as follows: Section 3 delves into the theoretical formulation of the introduced MCWOA algorithm for enhancing task scheduling methods. Section 4 outlines the results obtained and their subsequent analysis. Finally, Section 5 provides a summary of the conclusions drawn from this work.
Cloud service providers have devised a cloud environment featuring both Physical Machines (PMs) and Virtual Machines (VMs), complete with a public-access interface for task submission. Once tasks are submitted, a resource manager collects, supervises, and maintains updates of all cloud resources, spanning CPU, storage, and memory. Efficiency hinges on optimal resource utilization, necessitating constant monitoring and updates. After resource management, the scheduler assumes control, aiming to schedule tasks in a way that minimizes the resultant fitness function. The scheduling process only begins when the scheduler has received all necessary data from the virtual machine manager and resource manager, aiding in optimal scheduling decisions. After data collation, the decision-making process determines which tasks should be assigned to which virtual machines. This assignment process can be significantly enhanced by knowing the exact position of the VMs and having a complete list of the tasks. Incorporating such data streamlines the process, leading to reductions in migration costs, total task execution time, load utilization, and overall cost. Effective task management and scheduling, combined with a comprehensive understanding of available resources and task specifics, can enhance efficiency and result in substantial cost savings. This leads to an optimized, user-friendly, and cost-effective cloud environment, maximizing resource utilization.
In summary, within the sphere of cloud computing, when users delegate a specific task to the cloud with the expectation of a result, a series of dedicated processes and methodologies are enacted. These ensure that the task carried out by the cloud is executed both effectively and efficiently. Work distribution is evident within the cloud environment to manage distinct tasks, optimizing performance and throughput. When end-users send their specific tasks to the cloud framework, the task manager takes charge. This entity is entrusted with monitoring and archiving all tasks incoming from different users. Following this, a task scheduler algorithm is implemented to arrange the tasks. In this context, a newly introduced algorithm, named the MCWO algorithm, is applied. Key parameters such as makespan, latency, and energy consumption are taken into consideration when assessing the performance of the algorithm. Subsequently, control is transferred to the cloud service provider, which hosts a multitude of processes like resource management, and resource monitoring, among others. Following this, each task is directed to a data center equipped with a set of Virtual Machines (VMs). Here, each task is executed by the appropriate virtual machine as determined by the task scheduler. Consequently, the cloud is equipped to handle various tasks from users and assign the correct VMs to each task using the introduced task scheduler. This systematic approach ensures an efficient allocation and execution of tasks within the cloud environment. The below diagram Fig. 1 shows the architecture diagram of the cloud with MCWOA implemented in the task scheduler section.

Figure 1: Architecture diagram
Consider a set of
Based on the provided equation, the term
3.2.1 Makespan Calculation Formula
In this context,
3.2.2 Energy Consumption Formula
Typically, multiple components contribute to energy consumption in a cloud environment. These include host machines, electrical and network components, cooling systems, and storage devices. Among these, Host Machines (HMs), which are characterized by components like Central Processing Unit (CPU), Random Access Memory (RAM), and disk storage, are the primary contributors to energy consumption. The energy usage of HMs can be divided into two distinct categories: static energy (
The total energy consumed within a cloud environment is the cumulative sum of both static and dynamic energies. This combined energy consumption encapsulates the entire power usage, accounting for both idle and active operational states of the host machines. Therefore, both these energy categories play a pivotal role in understanding and managing the overall energy consumption in a cloud environment.
This study primarily concentrates on the dynamic energy (
Let,
Now for the static energy, the energy is directly proportional to the energy it consumes in its idle state. Moreover, a set
Therefore, the final energy consumption formula combining Eqs. (4) and (6) can be expressed as:
3.2.3 Latency Calculation Formula
In the above-mentioned equation, the variable
3.3 Task Scheduling Process Using MCWO Algorithm
The algorithm being proposed in this research is a confluence of principles and strategies derived from two well-established optimization algorithms, namely, the Chimp Optimization Algorithm (COA) and the Whale Optimization Algorithm (WOA). Each of these algorithms is known for its unique merits, with the COA recognized for its superior search capabilities, global optimization ability, and other beneficial features. A distinguishing feature of the COA is its capability to adeptly balance between exploration (wide-ranging search) and exploitation (focused search). This equilibrium is integral to preserving the diversity of solutions while facilitating a steady convergence speed. Such a dynamic interplay allows the COA to generate accurate results consistently while delivering an impressive level of throughput. Despite its myriad of advantages, the COA is not without limitations. It encounters issues relating to local search constraints, as well as difficulties with updating the position of its four core category variables. Conversely, the WOA, another widely used algorithm in optimization problems, boasts of its high performance and swift convergence speed. However, its proficiency tends to decrease as the number of tasks increases, indicating a predilection for optimal performance with smaller tasks. Aiming to address the identified drawbacks of both the COA and WOA, this research introduces an innovative algorithm known as the Modified Chimp-Whale Optimization (MCWO) algorithm. This novel algorithm is not merely a patchwork of the two preceding algorithms; instead, it ingeniously builds upon the strengths of both COA and WOA. The MCWO algorithm aspires to consistently generate high-performance results and sustain throughput, regardless of the size of the task at hand. Its inherent design principles and mechanisms have been honed to respond efficiently to any situation, ensuring it remains versatile and adaptable.
Furthermore, this algorithm leverages exploration and exploitation procedures at the onset of every iteration, aimed at reducing the overall time to reach the desired solution. The primary novelty in the proposed algorithm lies in its superior performance and throughput concerning energy consumption, makespan, and latency (Quality of Service parameters), as compared to the two foundational algorithms. Additionally, due to its hybrid approach, the algorithm adeptly manages complexities such as heterogeneous resources, fluctuating workloads, inter-task dependencies, and real-time constraints. Most notably, it serves as a deadline-sensitive algorithm, ensuring tasks are completed within their specified timeframes. The following sections are the breakdown and explanation of the proposed MCWO algorithms.
3.3.1 Chimp Optimization Algorithm (COA)
The Chimp Optimization Algorithm (COA) is an ingenious bio-inspired optimization method used for task scheduling in cloud computing, drawing inspiration from the food-foraging behavior of chimpanzees [27]. In the wild, chimpanzees use a balance of exploration, exploiting known food sources, and exploration, searching for new ones. Similarly, COA employs this principle of balancing exploration (global search) and exploitation (local search), ensuring a dynamic approach towards finding optimal solutions for complex computational problems. In the realm of task scheduling within cloud computing, the COA operates by assigning tasks (indicated as food sources) to virtual machines (similar to chimpanzees). In this ecosystem, each task represents a job to be executed, and each virtual machine serves as a computational resource with the capacity to perform these tasks. The algorithm begins with random initialization, where each virtual machine is assigned a task randomly. This scenario mirrors the way a group of chimpanzees would disperse in different directions to find food.
The key to COA’s efficacy is its dynamic adaptation ability. Just as a chimpanzee may switch from exploiting a known food source to exploring new sources based on various factors, the COA also strategically shifts between exploration and exploitation based on the problem’s characteristics and the stage of optimization. During the exploration phase, the algorithm allows for a wide-ranging search of the solution space. This phase is crucial to avoid being trapped in local optima and to ensure diverse solutions are considered. In the exploitation phase, the algorithm fine-tunes the solutions, converging towards the optimal solution. Moreover, the COA incorporates a social hierarchy behavior observed in chimpanzee groups, further enhancing its optimization capabilities. It classifies solutions into four categories, namely, driver, barrier, chaser, and attackers, representing the lowest to the highest quality solutions, respectively. These categories influence the search strategy, with higher-ranked solutions contributing more to the global search phase and lower-ranked ones contributing more to the local search phase.
3.4 Mathematical Model Related to COA
In the following section, the equations and formulas used in the Chimp optimization algorithm are discussed. As mentioned earlier, there are 4 different independent groups of chimps involved, each of which is driving, blocking, chasing, and attacking groups. The objective of these groups is to obtain the required solution (here the correct mapping of a user-defined task to the available virtual machine). The complete COA is divided into 2 stages which are the exploration and exploitation stage.
The exploration stage suggests the process of global search within the solution space. It is the phase where the algorithm conducts a widespread search to discover new potential solutions. The exploration stage is inspired by the behavior of chimpanzees when they are searching for food in the wild. In this phase, each ``chimp" (a potential solution in the algorithm) embarks on a search for ``food" (the optimal solution). This is achieved by creating new potential solutions through random perturbations of the current solutions, akin to a chimpanzee moving in different directions in search of food. The objective during this stage is to ensure diversity in the search process and to avoid premature convergence to a suboptimal solution. By exploring a broad scope of the solution space, the algorithm is more likely to discover global optima. To perform this process and discover the potential solution, the following equations are utilized:
In the above Eq. (9),
In the equations mentioned above, the variable
The exploitation stage in the Chimp Optimization Algorithm (COA) is the phase where the algorithm focuses on refining the current best solutions to find local optima. This phase draws inspiration from the behavior of chimpanzees when they are exploiting a known food source, concentrating on gathering as much as possible from it. During the exploitation phase, the algorithm takes the current best solutions (often represented by the driving, blocking, chasing, and attacking group solutions in the COA) and generates new potential solutions in their vicinity. This is done by applying small perturbations to the current best solutions, effectively probing the solution space around these points to find even better solutions. The goal here is to locate a near-optimal or optimal solution once a promising region of the solution space has been identified. To perform this process, equations similar to the ones seen in the exploration stage are utilized.
As previously mentioned, in the last phase, the chimps launch their attack and end the hunt when the prey ceases movement. The mathematical modeling of this attacking process involves reducing the value of
The above two mentioned stages are the most important stages that display the mathematical working of the Chimp Optimization algorithm. An important fact of the COA in task scheduling is its effectiveness in handling various complexities inherent in cloud computing environments. These include the heterogeneity of resources, where different virtual machines may have varying capabilities, and the dynamic nature of workloads, where the number and characteristics of tasks can change over time. The COA’s flexible and adaptive nature allows it to effectively navigate these complexities, dynamically adjusting its search strategy based on the current state of the system and the tasks at hand.
3.5 Whale Optimization Algorithm (WOA)
The Whale Optimization Algorithm (WOA) is an optimization technique rooted in nature, specifically designed for task scheduling in cloud computing [28]. It takes cues from the hunting patterns of humpback whales. Notably, the algorithm emulates the bubble-net hunting strategy, where whales ascend in a spiral motion and exhale bubbles to create a ‘net’, effectively entrapping their target. In the realm of task scheduling in cloud computing, the WOA is adept at efficiently allocating tasks to virtual machines (VMs) to optimize specific objectives, such as minimizing total execution time, reducing cost, or balancing load. In the WOA, each whale represents a potential solution or a specific task-to-VM assignment in the context of task scheduling. The WOA begins with a population of whales dispersed randomly in the search space. It then performs a series of mathematical operations to model the hunting behavior of the whales. These operations involve shrinking encircling and spiral updating positions that correspond to the formation of the bubble-net and the spiraling behavior of the whales, respectively.
3.5.1 Mathematical Model Related to WOA
In the subsequent segment, we delve into the mathematical underpinnings and formulas inherent to the Whale Optimization Algorithm. The WOA, tailored for task scheduling within cloud computing, incorporates various mathematical principles, drawing inspiration from the predatory patterns of humpback whales. The algorithm’s initiation comprises a collection of prospective solutions, each epitomized as a point within a multi-faceted space. Every such point denotes a distinct task assignment to a Virtual Machine (VM).
During the exploitation phase, the whales (potential solutions) encircle their prey (the current best solution). This behavior is mathematically modeled by gradually updating the position of each whale towards the location of the optimal result found so far. This is done using equations that shrink the distance between each prey and whale over time, driving the whales to converge towards the best solution. the equation used in this stage is similar to Eqs. (9) and (10).
3.5.3 Bubble-Net Attacking Method
In the exploration phase, the WOA uses a mathematical model of the spiral-shaped bubble-net hunting behavior of whales. This is modeled using a logarithmic spiral equation that generates a spiral path moving toward the best solution. This allows the algorithm to conduct a local search around the current best solution while also maintaining some degree of exploration. In the Logarithmic Spiral position updating System approach, Initially, humpback whales embark on an exploration of their prey, assessing the distance that separates them. Following this, they engage in a distinctive logarithmic spiral motion akin to a cone’s shape to pursue their prey. Each whale adjusts its position in sync with this spiral movement path. The mathematical representation of this strategy is provided as follows:
In this context, Eq. (17) delineates the distance between the tth whale and its prey. The term
In the aforementioned description,
If the whales cannot improve their solutions through encircling prey or bubble-net attacks, they will search for prey randomly. This is modeled by randomly updating the position of the whales within the search space. Eqs. (20) and (21) represent the search for prey.
In this context,
3.6 Modified Chimp-Whale Optimization Algorithm
As mentioned before, the proposed algorithm MCWO is based on two optimization algorithms the COA and WOA. Both these optimization algorithms are nature-inspired algorithms that can solve the required problem which is to improve the performance of the task scheduler. While the Chimp Optimization Algorithm (COA) offers several advantages in task scheduling for cloud computing, like all optimization algorithms, it also has certain limitations or drawbacks. While COA is designed to maintain a balance between exploitation and exploration to avoid local optima, it may still get trapped in local optima for certain complex or high-dimensional problems. As with any heuristic algorithm, COA does not guarantee to find the optimal solution. While it may find high-quality solutions in a reasonable time frame, there is no guarantee that these solutions are globally optimal. Moreover, the initial population calculation is assumed and there is no actual calculation involved due to which there is no guarantee of getting optimal solution all the time. Therefore, to enhance the performance of the COA, this study tries to propose a new algorithm called the modified Chimp-Whale Optimization algorithm, which tries to jump out of the local extreme value or optima using the technique called Bubble-net attacking method inspired by WOA. But by doing so the proposed algorithm will be able to provide a better solution with improved performances and throughput. Moreover, Both COA and WOA algorithms use random values to initial the population at the beginning, due to which the quality of the discovered solution reduces and the algorithm becomes less optimal. Thus, to understand the proposed better the algorithm is divided into 4 stages.
3.6.1 Stage 1–Population Initialization and Sequencing
As previously highlighted, population initialization is an integral component of an optimization algorithm. This stage involves two distinct yet interrelated processes: the initialization of pertinent parameters and their subsequent sequencing. The latter is employed to reduce computational time and strive towards enhanced algorithm performance. Initially, upon defining all the necessary parameters, such as tasks, available virtual machines, host machines, and so forth, it is essential to assign specific values to them. In this study, the primary emphasis is on the initialization and sequencing of the available set of tasks and the identification of the prey, this is done by taking their characteristics into account. The proposed algorithm utilizes the following equations during this crucial stage:
In Eq. (22), the term
In the above Eq. (23), the two variables
From the equations discussed above, the algorithm can derive a set of tasks or prey, determined by the characteristics of each task. Once this is achieved, the elements of the set
In stage 2, the available set of chimps or virtual machines is divided into 4 different independent groups namely, attacking, blocking, chasing, and driving groups. Therefore, the objective of this stage is to create 4 different groups and assign the available virtual machines to each of these groups depending on certain properties (like the execution time of a task by the individual virtual machine, energy consumption, and many more). To create clusters, first, all the available set of virtual machines is represented in the same arbitrary space as that of the prey. After which 4 points are selected randomly in the space. These selected points are termed the centroid. Let
Eq. (26) is executed only once at the beginning after the centroids are selected. The updation of the centroid value of a cluster is done using Eq. (27), where
where variable
3.6.3 Stage 3-Bubble-Net Attacking Method
In this stage, the chimps from the different clusters or groups move towards the prey or the task in a move-defined manner compared to the COA exploration and exploitation stage, as the location of the prey is not known. However, due to the equation from stages 1 and 2, the locations of the prey as well as the centroids of the clusters are known. Based on this knowledge the chimps approach the prey or the target in a Logarithmic Spiral manner so that at any given point in time, the algorithm does not get trapped in local extreme values. In this methodology, the chimps, or centroids, initially gauge their distance from the prey. Subsequently, they navigate using a conical logarithmic spiral trajectory to capture the prey. Every chimp within the groups refines their position anchored to this spiral trajectory. This technique is articulated mathematically as follows:
In Eq. (32), the distance from the centroid of each cluster or group to the prey is calculated, and based on this value the centroid moves in a spiral manner toward the prey, the cluster which is far moves faster compared to the cluster which is close to the prey, this will ensure that all the cluster completer surround the prey after tth iteration. After tth iteration, using Eq. (33) if the value of the
3.6.4 Stage 4–Evaluation Using Objective Function
In stage 4, once the mapping of the chimp to the prey is done, the solution is stored in the set
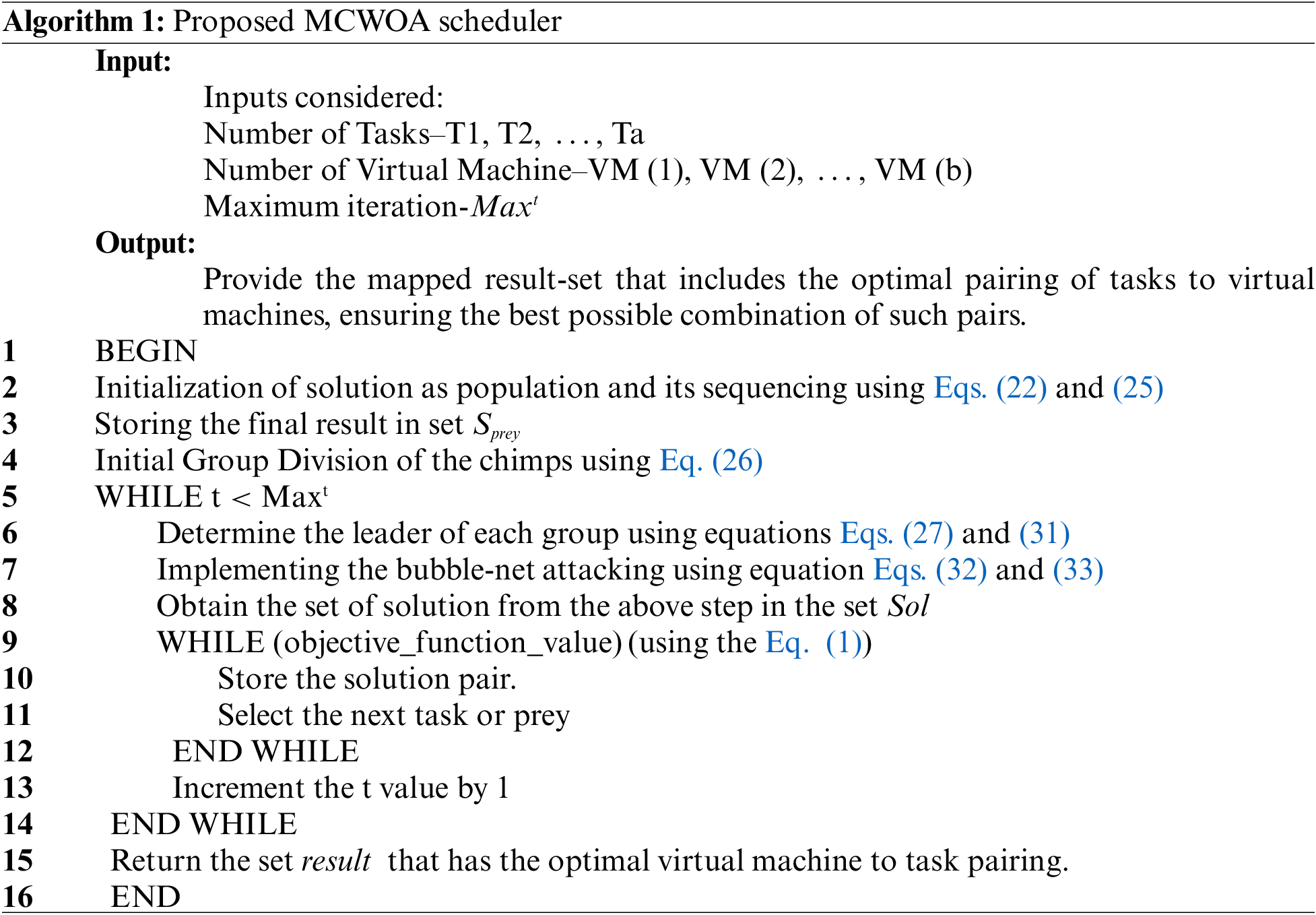
In Eq. (34), the value of the threshold varies from task to task. Therefore, all the formulas and explanations mentioned above suggest that the proposed algorithm is enhanced compared to the COA and WOA algorithms. The algorithm for MCWOA is shown below:
In this section, an intricate exploration of the experimental assessment of the Modified Chimp-Whale Optimization Algorithm is presented. The intention behind this in-depth evaluation is to gain a clearer understanding of how the algorithm fares under scrutiny, especially when compared with other renowned meta-heuristic strategies. The techniques chosen for comparison are among the most widely recognized and esteemed in the research community. These include the Whale Optimization Algorithm (WOA), the chimp algorithm (CA), the Genetic Algorithm (GA), the Ant Lion Optimizer (ALO), and, not the Grey Wolf Optimizer (GWO). CloudSim toolkit is identified as the platform for conducting the simulations. This choice is attributed to its robust capabilities and its recognition in the research domain for similar projects [29]. This toolkit was vital in verifying that the simulation results were both valid and reliable. A proper experimental setup is paramount for reproducibility and comprehension of the conditions under which results were obtained. In this context, the testing was performed on a formidable desktop computer. This device is driven by an Intel i7 processor, housing 4 CPUs, each operating at a speed of 2 GHz. Furthermore, to cater to the intensive computational demands of the simulations, the computer is outfitted with 8 GB of RAM. It runs on a Windows 64-bit platform, ensuring a stable and compatible environment for the tests. A central aspect of the experimental design was the software development environment. Java was the chosen language, with the Java Development Kit (JDK) employed for constructing the simulator. Java’s selection was influenced by its flexibility, its ubiquity, and the convenience it provides in formulating complex algorithms and simulation frameworks.
4.1 Initialization of Variables
The input incorporated several variables, as shown in the table below. Specifically, Table 1 lists these variables and the initial values assigned to them during the setup phase.

In Table 1, parameters such as the number of iterations and the number of tasks considered for evaluation under each section are limited to a small value. The reason for this is, by focusing on a few select quantities of tasks, it becomes easier to benchmark the proposed Modified Chimp-Whale Optimization Algorithm against existing algorithms which are the Whale Optimization Algorithm (WOA), the chimp algorithm (CA), the Genetic Algorithm (GA), the Ant Lion Optimizer (ALO) and Grey Wolf Optimizer (GWO). This allows for a more controlled and direct comparison, enabling a clear assessment of how the proposed algorithm performs in different scenarios. Moreover, based on this result, the proposed algorithm can easily be projected to a higher number of iterations and tasks.
This section evaluates the performance of the presented algorithm, focusing on its execution time for a task set. For a comprehensive evaluation, between 100 to 400 tasks are taken into account. The execution is based on different arrival rates, specifically analyzing makespan at rates of 10 and 40. The arrival rate indicates the time gap (in microseconds) between tasks reaching the scheduler. Without regulating this rate, there is potential for the scheduler to be overwhelmed by a sudden flood of tasks. Using varied arrival rate values ensures efficient functioning and maintains low communication bus bandwidth. The algorithm’s results are compared to others such as WOA, CA, GWO, ALO, and GA. The outcomes from the experimental simulations are depicted in Figs. 2 and 3.

Figure 2: Makespan for the tasks with an arrival rate of 10

Figure 3: Makespan for the tasks with an arrival rate of 40
The performance, measured by task execution time, was evaluated. Simulations used 100 to 400 tasks, all with an arrival rate of 10. The results of the proposed algorithm were benchmarked against WOA, CA, GWO, ALO, and GA, in terms of the seconds each algorithm takes to complete a particular set of tasks and displayed in Fig. 2. For 100 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 13.78, 15.01, 16.21, 18.9, 15.73 and 32.32 s, respectively. For 200 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 25.9, 27.23, 31.09, 34.61, 29.05 and 67 s, respectively. For 300 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 36.56, 38.31, 46.31, 50.31, 40.02 and 75.5 s, respectively. Finally, for 400 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 50.4, 52.3, 58.42, 66, 53.1 and 124 s, respectively. From the data provided, it is evident that the MCWOA technique showcases superior performance in makespan values when compared with other methods like WOA, CA, GWO, ALO, and GA. Specifically, MCWOA yields improvements in makespan of 4.67%, 16.70%, 25.42%, 8.16%, and 57.61% when contrasted with the performance of WOA, CA, GWO, ALO, and GA algorithms, respectively.
The performance, measured by task execution time, was evaluated. Simulations used 100 to 400 tasks, all with an arrival rate of 40. The results of the proposed algorithm were benchmarked against WOA, CA, GWO, ALO, and GA, in terms of the seconds each algorithm takes to complete a particular set of tasks and displayed in Fig. 3. For 100 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 16.98, 17.01, 19.67, 22.68, 18.786 and 38.784 s, respectively. For 200 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 30.76, 32.36, 38.12, 41.53, 34.86 and 80.4 s, respectively. For 300 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 45.13, 46.12, 55.41, 60.37, 48.02 and 90.6 s, respectively. Finally, for 400 tasks, the makespan values for MCWOA, WOA, CA, GWO, ALO, and GA are 60.8, 62.3, 71.01, 79.2, 63.98 and 148.8 s, respectively. From the data provided, it is evident that the MCWOA technique showcases superior performance in makespan values when compared with other methods like WOA, CA, GWO, ALO, and GA. Specifically, MCWOA yields improvements in makespan of 2.61%, 16.57%, 24.59%, 7.22%, and 57.14% when contrasted with the performance of WOA, CA, GWO, ALO, and GA algorithms, respectively.
In this segment, the efficiency of the proposed algorithm is gauged based on the energy consumed by the virtual machine to process a series of tasks. For an in-depth analysis, batches of 200 and 400 tasks are examined. These tasks are carried out according to different iteration values, starting from the 5th iteration to the 25th iteration. The energy consumption results from this innovative method are compared with those of alternative algorithms such as WOA, CA, GWO, ALO, and GA. Moreover, each of the values recorded in this section is expressed in terms of Kilowatt-hour (KWh). The findings from the experimental simulation are illustrated in Figs. 4 and 5.
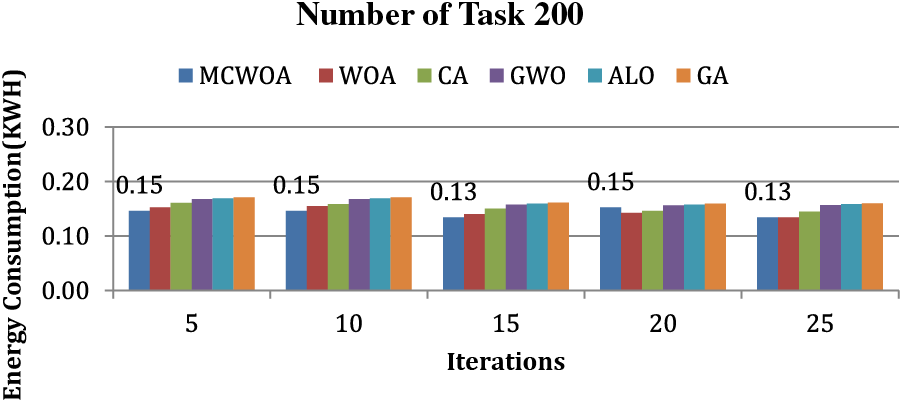
Figure 4: Energy consumption for 200 tasks

Figure 5: Energy consumption for 400 tasks
4.3.1 Energy Consumption for 200 Tasks
In this context, an energy consumption analysis is undertaken. For this simulation, 200 tasks were evaluated across diverse iterations. The outcomes of this analysis are showcased in Fig. 4. From the simulation data, it is clear that the newly introduced MCWOA algorithm effectively reduces energy consumption. From the graph, it is clear that during the 5th iteration, the consumption of energy for MCWOA, WOA, CA, GWO, ALO, and GA are 0.15, 0.15, 0.16, 0.17, 0.17 and 0.17 KWH. The consumption of energy during the 10th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.15, 0.16, 0.16, 0.17, 0.17 and 0.17 KWH. The consumption of energy during the 15th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.13, 0.14, 0.15, 0.16, 0.16 and 0.16 KWH. The consumption of energy during the 20th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.15, 0.14, 0.15, 0.16, 0.16 and 0.16 KWH and finally, the consumption of energy during the 25th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.13, 0.13, 0.14, 0.16, 0.16 and 0.16 KWH. From the data presented, it becomes evident that the MCWOA method is more energy-efficient than its counterparts, namely WOA, CA, GWO, ALO, and GA. When benchmarked against these methods, MCWOA demonstrated energy consumption of 1.47%, 6.17%, 11.49%, 12.37%, and 13.24% in comparison to WOA, CA, GWO, ALO, and GA, respectively.
4.3.2 Energy Evaluation for 400 Tasks
In this context, an energy consumption analysis is undertaken. For this simulation, 400 tasks were evaluated across diverse iterations. The outcomes of this analysis are showcased in Fig. 5. From the simulation data, it is clear that the newly introduced MCWOA algorithm effectively reduces energy consumption. From the graph, it is clear that during the 5th iteration, the consumption of energy for MCWOA, WOA, CA, GWO, ALO, and GA are 0.24, 0.25, 0.26, 0.28, 0.28 and 0.28 KWH. The consumption of energy during the 10th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.24, 0.25, 0.26, 0.28, 0.28 and 0.28 KWH. The consumption of energy during the 15th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.22, 0.23, 0.25, 0.26, 0.26 and 0.26 KWH. The consumption of energy during the 20th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.25, 0.23, 0.24, 0.26, 0.26 and 0.26 KWH. And finally, the consumption of energy during the 25th iteration for MCWOA, WOA, CA, GWO, ALO, and GA are 0.22, 0.22, 0.24, 0.26, 0.26 KWH and 0.26 KWH. From the data presented, it becomes evident that the MCWOA method is more energy-efficient than its counterparts, namely WOA, CA, GWO, ALO, and GA. When benchmarked against these methods, MCWOA demonstrated energy consumption of 1.47%, 6.17%, 11.49%, 12.37%, and 13.24% in comparison to WOA, CA, GWO, ALO, and GA, respectively.
In this segment, the efficacy of the suggested algorithm is analyzed through its latency, meaning an examination of its response time performance. The evaluation involves measuring the interval from when a request is made to when a response is received, or the duration from task submission to its execution in a cloud setting. This algorithm’s latency values are then compared against those from benchmark algorithms, namely WOA, CA, GWO, ALO, and GA. To assess the latency across different algorithms, tasks ranging from 100 to 400 are provided and their average waiting time is expressed in milliseconds (ms) which is graphically represented in Fig. 6. For 100 tasks, the latency values for MCWOA, WOA, CA, GWO, ALO, and GA are 7.60, 7.68, 8.14, 8.06, 8.05 and 7.88 ms, respectively. For 200 tasks, the latency values for MCWOA, WOA, CA, GWO, ALO, and GA are 8.17, 8.26, 8.73, 8.64, 8.62 and 8.45 ms, respectively. For 300 tasks, the latency values for MCWOA, WOA, CA, GWO, ALO, and GA are 8.53, 8.62, 9.22, 9.13, 9.11 and 8.93 ms, respectively. And finally, for 400 tasks, the latency values for MCWOA, WOA, CA, GWO, ALO, and GA are 8.91, 9.01, 9.59, 9.50, 9.48 and 9.29 ms, respectively. From the data provided, it is evident that the MCWOA technique showcases superior performance in latency values when compared with other methods like WOA, CA, GWO, ALO, and GA. Specifically, MCWOA yields improvements in latency of 1.1%, 6.96%, 6.02%, 5.83%, and 3.91% when contrasted with the performance of WOA, CA, GWO, ALO, and GA algorithms, respectively.

Figure 6: Latency Evaluation
One novel approach to the complex problems of effective task scheduling in cloud computing environments is the proposed MCWOA (Modified Chimp-Whale Optimization Algorithm). This novel algorithm functions in the cloud computing environment, where Quality-of-Service (QoS) characteristics—latency, energy consumption, and makespan—are critical to task scheduling. Motivated by its multi-objective optimization methodology, MCWOA aims to balance these factors, guaranteeing that cloud-based systems perform at maximum effectiveness while meeting strict QoS requirements. When MCWOA is compared with a range of popular algorithms, such as the Whale Optimization Algorithm (WOA), Cuckoo Algorithm (CA), Grey Wolf Optimization (GWO), Ant Lion Optimizer (ALO), and Genetic Algorithm (GA), its uniqueness becomes evident. Through a series of rigorous experiments, MCWOA consistently shows the best results; it excels in makespan metrics and energy efficiency in particular. There were several different scenarios included in these experiments, with task quantities ranging from 100 to 500 and virtual machine (VM) quantities varying between 20 40, and 60. Every time, the results of these tests confirm the substantial and ongoing advancements that MCWOA brings to the field of cloud-based task scheduling. Focusing on the observable advantages that MCWOA provides to the sector makes it clear that the algorithm has a significant influence that goes well beyond research and development. Through a significant reduction in task turnaround times and an improvement in resource utilization, MCWOA embodies efficiency in task execution. Furthermore, the algorithm’s built-in capacity to reduce waste and conserve energy results in significant cost savings, which is crucial at a time when operating costs are constantly rising. The operational efficiency of MCWOA has a cascading effect on various industries and organizations. Companies that frequently struggle with the constant problem of cost optimization find in MCWOA a dependable ally that not only speeds up task completion but also significantly lowers operating costs.
Acknowledgement: The authors wish to express their thanks to Vellore Institute of Technology (VIT) Chennai for their extensive support during this work.
Funding Statement: The authors received no specific funding for this work.
Author Contributions: Conceptualization: C. Chandrashekar and P. Krishnadoss, methodology: V. K. Poornachary, software: B. Ananthakrishnan, validation: B. Ananthakrishnan and P. Krishnadoss, formal analysisb: P. Krishnadoss, investigation: P. Krishnadoss, resources: V. K. Poornachary, data curation: V. K. Poornachary, writing-original draft preparation: P. Krishnadoss, V. K. Poornachary, B. Ananthakrishnan, writing-review and editing: P. Krishnadoss, visualization: P. Krishnadoss, supervision: V. K. Poornachary, project administration: V. K. Poornachary, funding acquisition: V. K. Poornachary. All authors have read and agreed to the published version of the manuscript. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data can be shared on valid request made to corresponding author.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. L. Zuo, L. Shu, S. Dong, C. Zhu, and T. Hara, “A multi-objective optimization scheduling method based on the ant colony algorithm in cloud computing,” IEEE Access, vol. 3, no. 1, pp. 2687–2699, 2015. doi: 10.1109/ACCESS.2015.2508940. [Google Scholar] [CrossRef]
2. B. G. Batista et al., “Performance evaluation of resource management in cloud computing environments,” PLoS One, vol. 10, no. 11, pp. e0141914, 2015. doi: 10.1371/journal.pone.0141914. [Google Scholar] [PubMed] [CrossRef]
3. X. Zuo, G. Zhang, and W. Tan, “Self-adaptive learning PSO-based deadline constrained task scheduling for hybrid IaaS cloud,” IEEE Trans. Autom. Sci. Eng., vol. 11, no. 2, pp. 564–573, 2013. doi: 10.1109/TASE.2013.2272758. [Google Scholar] [CrossRef]
4. M. Abdullahi and M. A. Ngadi, “Symbiotic organism search optimization based task scheduling in cloud computing environment,” Future Gener. Comput. Syst., vol. 56, pp. 640–650, 2016. doi: 10.1016/j.future.2015.08.006. [Google Scholar] [CrossRef]
5. G. Natesan, N. Manikandan, K. Pradeep, and L. Sherly Puspha Annabel, “Task scheduling based on minimization of makespan and energy consumption using binary GWO algorithm in cloud environment,” Peer Peer Netw. Appl., vol. 2023, no. 5, pp. 1–14, 2023. [Google Scholar]
6. M. Nanjappan, G. Natesan, and P. Krishnadoss, “HFTO: Hybrid firebug tunicate optimizer for fault tolerance and dynamic task scheduling in cloud computing,” Wirel. Pers. Commun., vol. 129, no. 1, pp. 323–344, 2023. doi: 10.1007/s11277-022-10099-0. [Google Scholar] [CrossRef]
7. G. Natesan, J. Ali, P. Krishnadoss, R. Chidambaram, and M. Nanjappan, “Optimization techniques for task scheduling criteria in IaaS cloud computing atmosphere using nature inspired hybrid spotted hyena optimization algorithm,” Concurr. Comput. Pract. Exp., vol. 34, no. 24, pp. e7228, 2022. doi: 10.1002/cpe.7228. [Google Scholar] [CrossRef]
8. F. S. Prity, M. H. Gazi, and K. A. Uddin, “A review of task scheduling in cloud computing based on nature-inspired optimization algorithm,” Clust. Comput., vol. 26, no. 5, pp. 3037–3067, 2023. doi: 10.1007/s10586-023-04090-y. [Google Scholar] [CrossRef]
9. P. Krishnadoss, V. K. Poornachary, P. Krishnamoorthy, and L. Shanmugam, “Improvised seagull optimization algorithm for scheduling tasks in heterogeneous cloud environment,” Comput. Mater. Contin., vol. 74, no. 2, pp. 2461–2478, 2023. doi: 10.32604/cmc.2023.031614. [Google Scholar] [CrossRef]
10. S. Chakraborty, A. K. Saha, and A. Chhabra, “Improving whale optimization algorithm with elite strategy and its application to engineering-design and cloud task scheduling problems,” Cogn. Comput., vol. 15, pp. 1–29, 2023. doi: 10.1007/s12559-022-10099-z. [Google Scholar] [CrossRef]
11. S. Mangalampalli, G. R. Karri, and U. Kose, “Multi objective trust aware task scheduling algorithm in cloud computing using Whale Optimization,” J. King Saud Univ.-Comput. Inf. Sci., vol. 35, no. 2, pp. 791–809, 2023. doi: 10.1016/j.jksuci.2023.01.016. [Google Scholar] [CrossRef]
12. A. Y. Hamed, M. K. Elnahary, F. S. Alsubaei, and H. H. El-Sayed, “Optimization task scheduling using cooperation search algorithm for heterogeneous cloud computing systems,” Comput. Mater. Contin., vol. 74, no. 1, pp. 2133–2148, 2023. doi: 10.32604/cmc.2023.032215. [Google Scholar] [CrossRef]
13. P. Pirozmand, H. Jalalinejad, A. A. R. Hosseinabadi, S. Mirkamali, and Y. Li, “An improved particle swarm optimization algorithm for task scheduling in cloud computing,” J. Ambient Intell. Humaniz. Comput., vol. 14, no. 4, pp. 4313–4327, 2023. doi: 10.1007/s12652-023-04541-9. [Google Scholar] [CrossRef]
14. V. Gowri and B. Baranidharan, “An energy efficient and secure model using chaotic levy flight deep q-learning in healthcare system,” Sustain. Comput.: Inform. Syst., vol. 39, pp. 100894, 2023. doi: 10.1016/j.suscom.2023.100894. [Google Scholar] [CrossRef]
15. S. Singh and D. P. Vidyarthi, “An integrated approach of ML-metaheuristics for secure service placement in fog-cloud ecosystem,” Internet of Things, vol. 22, no. 9, pp. 100817, 2023. doi: 10.1016/j.iot.2023.100817. [Google Scholar] [CrossRef]
16. G. Kumaresan, K. Devi, S. Shanthi, B. Muthusenthil, and A. Samydurai, “Hybrid fuzzy archimedes-based Light GBM-XGBoost model for distributed task scheduling in mobile edge computing,” Trans. Emerg. Telecommun. Technol., vol. 34, no. 4, pp. e4733, 2023. doi: 10.1002/ett.4733. [Google Scholar] [CrossRef]
17. I. Z. Yakubu and M. Murali, “An efficient meta-heuristic resource allocation with load balancing in IoT-Fog-cloud computing environment,” J. Ambient Intell. Humaniz. Comput., vol. 14, no. 3, pp. 2981–2992, 2023. doi: 10.1007/s12652-023-04544-6. [Google Scholar] [CrossRef]
18. V. Sindhu and M. Prakash, “Energy-efficient task scheduling and resource allocation for improving the performance of a cloud-fog environment,” Symmetry, vol. 14, no. 11, pp. 2340, 2022. doi: 10.3390/sym14112340. [Google Scholar] [CrossRef]
19. R. Sing, S. K. Bhoi, N. Panigrahi, K. S. Sahoo, N. Jhanjhi and M. A. AlZain, “A whale optimization algorithm based resource allocation scheme for cloud-fog based IoT applications,” Electronics, vol. 11, no. 19, pp. 3207, 2022. doi: 10.3390/electronics11193207. [Google Scholar] [CrossRef]
20. F. M. Talaat, “Effective prediction and resource allocation method (EPRAM) in fog computing environment for smart healthcare system,” Multimed. Tools Appl., vol. 81, no. 6, pp. 8235–8258, 2022. doi: 10.1007/s11042-022-12223-5. [Google Scholar] [CrossRef]
21. M. Abdel-Basset, D. El-Shahat, M. Elhoseny, and H. Song, “Energy-aware metaheuristic algorithm for industrial-Internet-of-Things task scheduling problems in fog computing applications,” IEEE Internet Things J., vol. 8, no. 16, pp. 12638–12649, 2020. doi: 10.1109/JIOT.2020.3012617. [Google Scholar] [CrossRef]
22. D. Mukherjee, S. Nandy, S. Mohan, Y. D. Al-Otaibi, and W. S. Alnumay, “Sustainable task scheduling strategy in cloudlets,” Sustain. Comput.: Inform. Syst., vol. 30, pp. 100513, 2021. doi: 10.1016/j.suscom.2021.100513. [Google Scholar] [CrossRef]
23. M. Chowdhury, “A prediction and budget-aware offloading scheme for wearable computing,” Int. J. Sens. Netw., vol. 36, no. 4, pp. 204–215, 2021. doi: 10.1504/ijsnet.2021.117481. [Google Scholar] [CrossRef]
24. J. Yuan, H. Xiao, Z. Shen, T. Zhang, and J. Jin, “ELECT: Energy-efficient intelligent edge-cloud collaboration for remote IoT services,” Future Gener. Comput. Syst., vol. 147, pp. 179–194, 2023. doi: 10.1016/j.future.2023.04.030. [Google Scholar] [CrossRef]
25. F. Fakhfakh, S. Cheikhrouhou, B. Dammak, M. Hamdi, and M. Rekik, “Multi-objective approach for scheduling time-aware business processes in cloud-fog environment,” J. Supercomput., vol. 79, no. 8, pp. 8153–8177, 2023. doi: 10.1007/s11227-022-04690-2. [Google Scholar] [CrossRef]
26. R. Khamkar, P. Das, and S. Namasudra, “SCEOMOO: A novel subspace clustering approach using evolutionary algorithm, off-spring generation and multi-objective optimization,” Appl. Soft Comput., vol. 139, no. 1, pp. 1–11, 2023. doi: 10.1016/j.asoc.2023.110185. [Google Scholar] [CrossRef]
27. M. Khishe and M. R. Mosavi, “Chimp optimization algorithm,” Expert Syst. Appl., vol. 149, pp. 113338, 2020. doi: 10.1016/j.eswa.2020.113338. [Google Scholar] [CrossRef]
28. S. Mirjalili and A. Lewis, “The whale optimization algorithm,” Adv. Eng. Softw., vol. 95, no. 12, pp. 51–67, 2016. doi: 10.1016/j.advengsoft.2016.01.008. [Google Scholar] [CrossRef]
29. R. N. Calheiros, R. Ranjan, A. Beloglazov, C. A. de Rose, and R. Buyya, “CloudSim: A toolkit for modeling and simulation of cloud computing environments and evaluation of resource provisioning algorithms,” Softw.-Pract. Exp., vol. 41, no. 1, pp. 23–50, 2011. doi: 10.1002/spe.995. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools