
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

A Trusted Edge Resource Allocation Framework for Internet of Vehicles
1 State Key Laboratory of Networking and Switching Technology, Beijing University of Posts and Telecommunications, Beijing, 100876, China
2 State Grid Henan Information & Telecommunication Company, Zhengzhou, 450018, China
3 School of Information Studies, Syracuse University, Syracuse, 13244, USA
* Corresponding Author: Xingyu Chen. Email:
Computers, Materials & Continua 2023, 77(2), 2629-2644. https://doi.org/10.32604/cmc.2023.035526
Received 24 August 2022; Accepted 08 December 2022; Issue published 29 November 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
With the continuous progress of information technique, assisted driving technology has become an effective technique to avoid traffic accidents. Due to the complex road conditions and the threat of vehicle information being attacked and tampered with, it is difficult to ensure information security. This paper uses blockchain to ensure the safety of driving information and introduces mobile edge computing technology to monitor vehicle information and road condition information in real time, calculate the appropriate speed, and plan a reasonable driving route for the driver. To solve these problems, this paper proposes a trusted edge resource allocation framework for assisted driving service, which includes two stages: the blockchain generation stage (the first stage) and assisted driving service stage (the second stage). Furthermore, in the first stage, a delay-and-throughput-oriented block generation model for the mobile terminal is designed. In the second stage, a balanced offloading algorithm for assisted driving service based on edge collaboration is proposed to solve the problems of unbalanced load of cluster mobile edge computing (MEC) servers and low resource utilization of the system. And this paper optimizes the throughput of blockchain and delay of the transportation network through deep reinforcement learning (DRL) algorithm. Finally, compared with joint computation and communication resources’ allocation (JCCR) and resource allocation method based on binary offloading (RAB), our proposed scheme can optimize the delay by 7.4% and 26.7%, and support various application services of the vehicular networks more effectively.Keywords
The Internet of Vehicles (IoV) is a new mobile ad hoc network recent years, which ensures road safety and improves people’s driving experience. With the increasing traffic flow of urban road networks, drivers inevitably encounter congested areas in the process of driving, which greatly increases travel time, fuel consumption, and additional gas emissions. To solve this problem, assisted driving technology is introduced to reduce the probability of accidents, and correct the vehicle driving routes in time after detecting accidents to improve transportation efficiency. We can obtain the current vehicle position, direction, speed, and other driving data through the onboard unit (OBU), and infer the driver’s dangerous driving intensity, to verify the driver’s behavior and curb the accident from the source [1]. We comprehensively consider the current vehicle information (such as vehicle identification (ID), location, acceleration, speed, and destination) and road condition information, calculate the reasonable speed, and plan a recommended driving route to prompt the driver.
In the traditional assisted driving scheme, information processing is concentrated on one side, which is vulnerable to attack. And each server needs to maintain a large amount of account information, resulting in a waste of resources for many servers, which may also lead to server performance bottlenecks [2]. Blockchain technology can establish trust relationships for nodes in vehicular networks, effectively solve the security problems such as decentralized management and privacy protection of the IoV, and reduce the risk of information tampering and data center attacks [2]. However, many existing public blockchains cannot meet the requirements of high throughput and low delay of assisted driving tasks.
In the application of smart transportation, the frequent driving operation of vehicles makes the nearby data processing and strict delay requirements become extremely important. MEC has the ability of high bandwidth and low latency. It can provide computing services for all kinds of mobile network edges, which can reduce the latency caused by long-distance communication transmission, and make higher performance. Therefore, we use MEC to realize the real-time processing of computing-intensive tasks generated by driving assistance and reduce the total delay of service [3].
The demand for a large number of vehicles for assisted driving makes vehicle computing services face great challenges. Many schemes to solve the problem of assisted driving have been proposed. A driving assistance scheme based on the driver’s behavior was proposed in [1,4], which obtains driving information through sensors and cameras, and provides reasonable suggestions to drivers after processing. But it cannot adjust the driving route dynamically. References [2,5] proposed anonymous identity authentication schemes, which applied blockchain in the IoV service to protect the security of vehicle information, but they did not consider improving the throughput of blockchain. References [3,6] designed a scheme to deploy the edge computing function to roadside units (RSUs). However, they did not consider the task allocation of collaborative offloading and load balancing of MEC servers. To sum up, the existing researches still have many problems [1–6].
To solve these problems, we first uses a digital map to configure road condition information such as ramp geometry and traffic information on the road-side unit (RSU) and then generates a block on the vehicle to store some parameters of the vehicle obtained through OBU, such as vehicle ID, location, acceleration, speed, destination. In this process, the block size, block interval, and offloading decision of tasks are jointly optimized to reduce delay and maximize transaction throughput. Then the parameters of the vehicle will be uploaded to the RSU, and the destination, speed, and other attributes will be comprehensively analyzed to plan the appropriate speed and route. At the same time, the block will be generated on the RSU and the processing results will be stored in it. Aiming at the computing-intensive tasks generated in this stage, we propose a balanced offloading algorithm for assisted driving service based on edge cooperation and jointly optimize the offloading mode and ratio to further optimize the total delay of the system. The main contributions of this paper are as follows:
(1) A trusted processing framework for assisted driving service is established, the whole framework includes two stages: the first stage designs a delay-and-throughput oriented block generation model for mobile terminals, and the second stage proposes a balanced offloading algorithm for assisted driving service based on edge collaboration. The two-stage optimization problem is modeled as the Markov decision process (MDP), and the paper introduces the deep reinforcement learning (DRL) algorithm to solve it.
(2) A load-balancing model for clustered MEC servers is proposed by comprehensively considering the usage of storage and computing resources of MEC servers. The paper designs a load factor based on the model, and models the MEC server as the M/M/1 queue, which affects the task offloading ratio in the collaborative computing mode and further optimized the total delay of the system.
The rest of this paper is organized as follows. Section 2 reviews the related works. Section 3 designs the trusted processing framework for assisted driving services. Section 4 proposes the two-stage joint optimization problems, and uses the DRL algorithm to solve these problems. Section 5 analyses the simulation results, and Section 6 draws a conclusion.
This section introduces the existing assisted driving technology, the application of blockchain in vehicular networks, and the computing offloading methods based on MEC.
2.1 Assisted Driving Technology
To improve the efficiency of traffic operations and ensure the safety of drivers, many assisted driving schemes have been proposed. Many schemes [1,4,7,8] deal with the driving information but do not consider the efficiency of the processing. All the calculation tasks are completed on the vehicle. Zhang et al. [9] proposed an abnormal behavior detection scheme for autonomous vehicles. The scheme offloads the computing tasks to the MEC server with strong computing power and large storage space, which greatly improves the efficiency of service processing. However, the scheme ignores the security of data. Therefore, to solve computing-intensive tasks generated in assisted driving process and security problems, we introduce MEC technology and blockchain to the paper.
2.2 Application of Blockchain in the Vehicular Networks
To guarantee the safety of data, several works [10,11] built blockchain systems for IoV. Bai et al. [12] proposed a driving behavior warning scheme based on blockchain. The road information and driving data are regarded as transactions to ensure that the correct road condition is broadcast to other vehicle locations. Yao et al. [2] proposed an anonymous authentication mechanism, which can effectively resist the attack of data tampering by combining encryption with blockchain. Yang et al. [13] proposed a consensus mechanism based on proof-of-work (PoW) and proof-of-stake (PoS) for blockchain in the IoV. To prevent the dissemination of forged information from interior terminals, Zheng et al. [14] designed an anonymous authentication scheme based on blockchain, which ensures the safety of communication between vehicles.
The use of blockchain technology can effectively guarantee the security requirements of the IoV, but the above schemes all ignore the transaction throughput of blockchain. In order to improve transaction throughput, this paper optimizes the size and interval of generated blocks.
2.3 Computing Offloading Methods Based on Mobile Edge Computing
MEC servers can provide flexible computing and storage resources for various terminals at the edge of the network. Many pieces of literature [15–17] have proposed various solutions to solve the problem of computing offload in mobile edge computing. Feng et al. [3] proposed an edge computing framework for autonomous vehicles. It arranges the vehicles on the road for scheduling according to the information collected from the adjacent vehicles, to ensure that the vehicle computing resources are fully utilized. Zhao et al. [18] designed a collaborative computing offloading scheme, which made full use of computing resources and reduced the completion time of tasks. However, the above two schemes do not consider the impact of vehicle movement on task offloading. Boukerche et al. [19] proposed a data retrieval scheme for computing offloading in vehicle edge computing (VEC), which modeled the computing offloading task in VEC, estimated the user’s position, and then selected the appropriate access point. Yang et al. [20] proposed a mobile-aware task offloading scheme, which optimized the task offloading decision, delay, and computing resource allocation.
Many schemes adopt a binary offloading decision, which does not consider the problem of computing task allocation in the process of multi-device collaborative offloading. We propose a load-balance-based offloading ratio decision model, which takes the resources of the MEC server into account. And we model the resource allocation process in the system as an MDP and introduce A3C to solve the problem.
We propose a trusted edge resource allocation framework for assisted driving service, which consists of a blockchain system, multiple MEC servers, and multiple vehicles, as shown in Fig. 1. In the vehicular network,
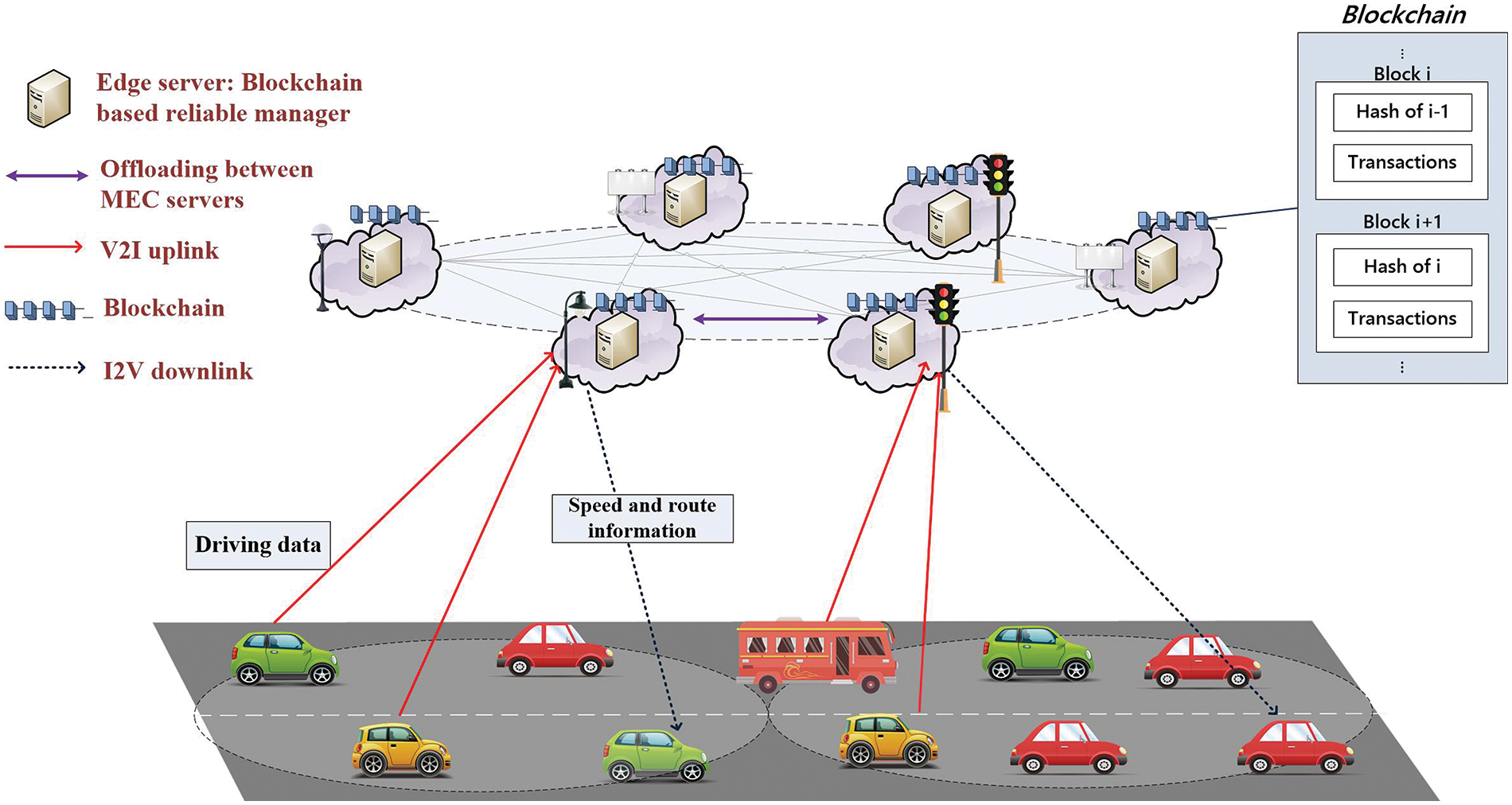
Figure 1: The blockchain-based processing framework for assisted driving service
We deploy the blockchain system on the mobile terminal and RSU to store the vehicular parameter information (storage transaction) and result information (policy transaction) into the block generated by the terminal and RSU, respectively. A blockchain is a digital ledger in which all executed transactions are stored. It uses a distributed point-to-point network to generate a continuous, ordered list of records. Each block contains a set of signed transactions, which are verified by a consensus mechanism. Using blockchain technology, we can maintain a reliable and consistent database [13], and ensure the safety and credibility of the vehicular network. We introduce the delegated Byzantine fault tolerance (dBFT) consensus mechanism and participate in consensus through proxy voting.
To improve efficiency, the consensus nodes are MEC servers that have a high voting rate. In addition, the voting rate depends on the staking and available resources [21]. We use
where
Assuming that
3.3 Mobile Communication Model
Assuming that the coverage area of RSU is
where
where
There are two stages in the proposed framework. In the first stage of mobile terminal blockchain generation, a mining task
We use
3.4.1 Local Computing Mode (Mode 1)
(1) Local mobile terminal independent computing mode (mode 1-V)
For the local mobile terminal, we use a parameter tuple
(2) Local MEC server independent computing mode (mode1-R)
The task
where
3.4.2 Collaborative Computing Mode for Adjacent Mobile Edge Computing Servers (Mode 2)
Similar to [23], we analyze the performance of mode 1. The calculation task
Moreover, the task offloaded to the surrounding RSU
where
The transmission rate
where
Therefore, the total delay of the system in the assisted driving service stage can be denoted as:
3.4.3 Collaborative Computing Mode for Mobile Terminals and Mobile Edge Computing Servers (Mode 3)
Similar to mode 2, we analyze the performance of mode 3. The mining task
The time taken to offload the remaining tasks from the vehicle to RSU
where
Therefore, the average time delay
The total delay of the system in blockchain generation stage is:
We use
where
We define the load rate of RSU
where
The average load rate
The more balanced the load of the cluster, the more stable it will be. We use the standard deviation
Finally, we define the load factor
Since the wireless channel has Markovian property, we modeled the blockchain-based processing framework for assisted driving service as MDP. Generally speaking, reinforcement learning (RL) can solve MDP problems greatly. The RL adjusts the strategy adaptively according to the reward function through learning, and then obtains the optimal strategy. However, due to traditional RL has low learning efficiency and quality in complex environment, we use DRL to solve the problem of resource allocation [24].
4.1 Blockchain Generation Stage (The First Stage)
In the process of driving, the vehicle acquires the driver and vehicle data and generates a block on the vehicle. At this time, the blockchain mining process on the mobile terminal will produce computing-intensive tasks, which seriously affects the system delay. To solve this problem, we consider an optimization problem with a delay-and-throughput focus that jointly optimize the offloading location, block size, and block interval, which is defined in formula (26):
where
The state space of the current timeslot can be expressed as the combination of the number of stacks
We denote the state transition probability density function by
Offloading mode
To improve the efficiency and security of consensus process, we select the MEC server which has a high voting rate as the consensus node according to the stake and available resources held by the node, and use the dBFT algorithm as the consensus mechanism. Using the limit fraction method [21], as the equations below, the size of a block and the interval between blocks are determined:
where
Finally, the reward function can be expressed as:
where
4.2 Assisted Driving Service Stage (The Second Stage)
To optimize the resource allocation and realize the balanced offloading of the assisted driving service, we put forward an optimization problem to further reduce total latency and jointly optimize the offloading mode and offloading rate:
Among them, constraints C1 and constraints C2 guarantee the decision on the offloading mode and offloading ratio of the task is effective. Constraint C3 represents that the RSU’s CPU frequency does not exceed its maximum value
Our state space includes available computing resources
The probability of leaving the current state
The action space consists of offloading mode
We express the reward function as:
Since optimization algorithms have the problem of falling into the local optimal solution or using too long a solution time, the computation speed or quality of them is low. By comparison, the DRL algorithm can effectively solve these problems. Value-based approach and policy-based approach are two main types of RL. The value-based approach solve problems by predicting the total value of a given state from now to the future. The policy-based approach adjusts the probability distribution of each action in a given state. A3C is an asynchronous RL algorithm [25]. A3C can work in discrete and continuous action spaces, which combines the advantages of two RL methods. Through the A3C algorithm, computing resources are fully utilized and data correlations are effectively broken. We apply A3C algorithm for our problem.
As in Fig. 2, the blockchain-based processing framework for assisted driving service includes two stages: the blockchain generation stage and assisted driving service stage. First of all, we use the sensors to get the dynamic and driving data of the vehicle and store some parameters of the vehicle, such as vehicle ID, location, acceleration, speed, destination, etc., into the block generated on the terminal. Then, the collected vehicle information and road condition information are comprehensively calculated and analyzed. This stage will produce computing-intensive tasks. To optimize the total latency and realize the load balancing among cluster MEC servers, we propose a balanced offloading algorithm for assisted driving service based on edge collaboration, and jointly optimize the offloading mode and offloading ratio. And the processing results of assisted driving service will be stored in the block generated on the RSU.
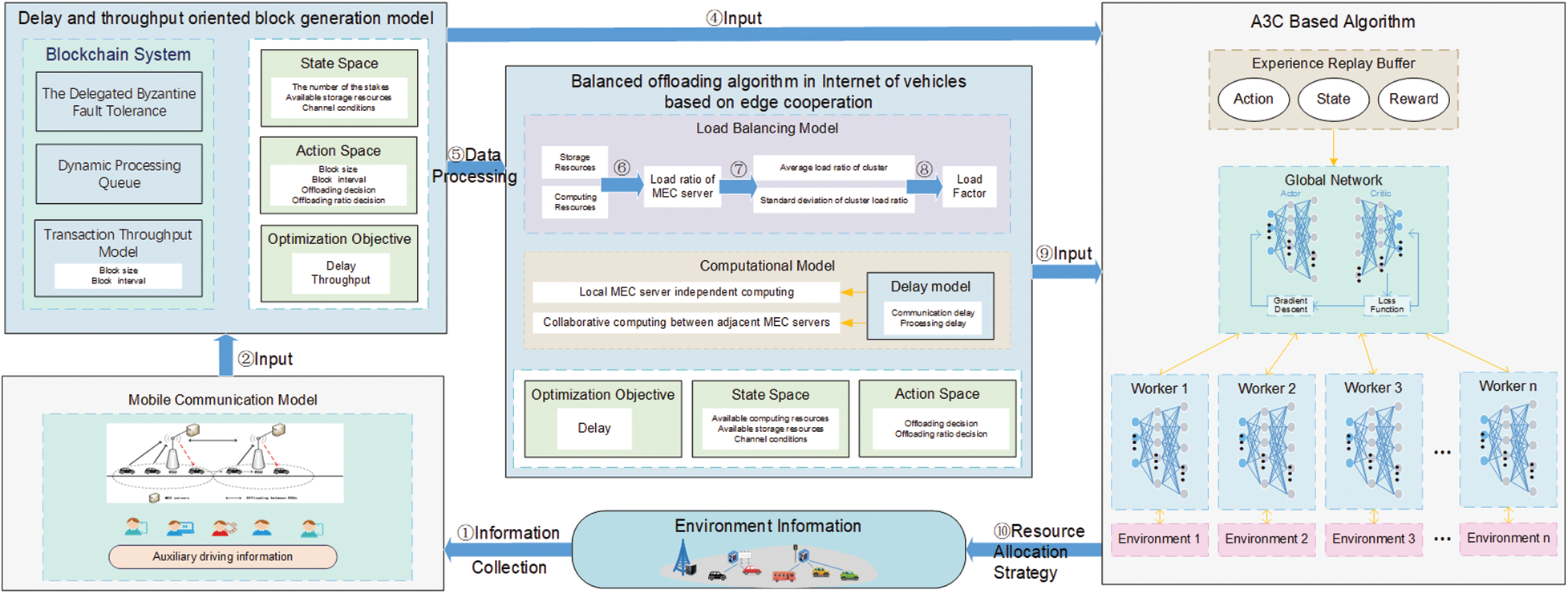
Figure 2: The flow chart of the algorithm
5 Simulation Results and Analysis
5.1 Parameter Settings and Comparison Algorithms
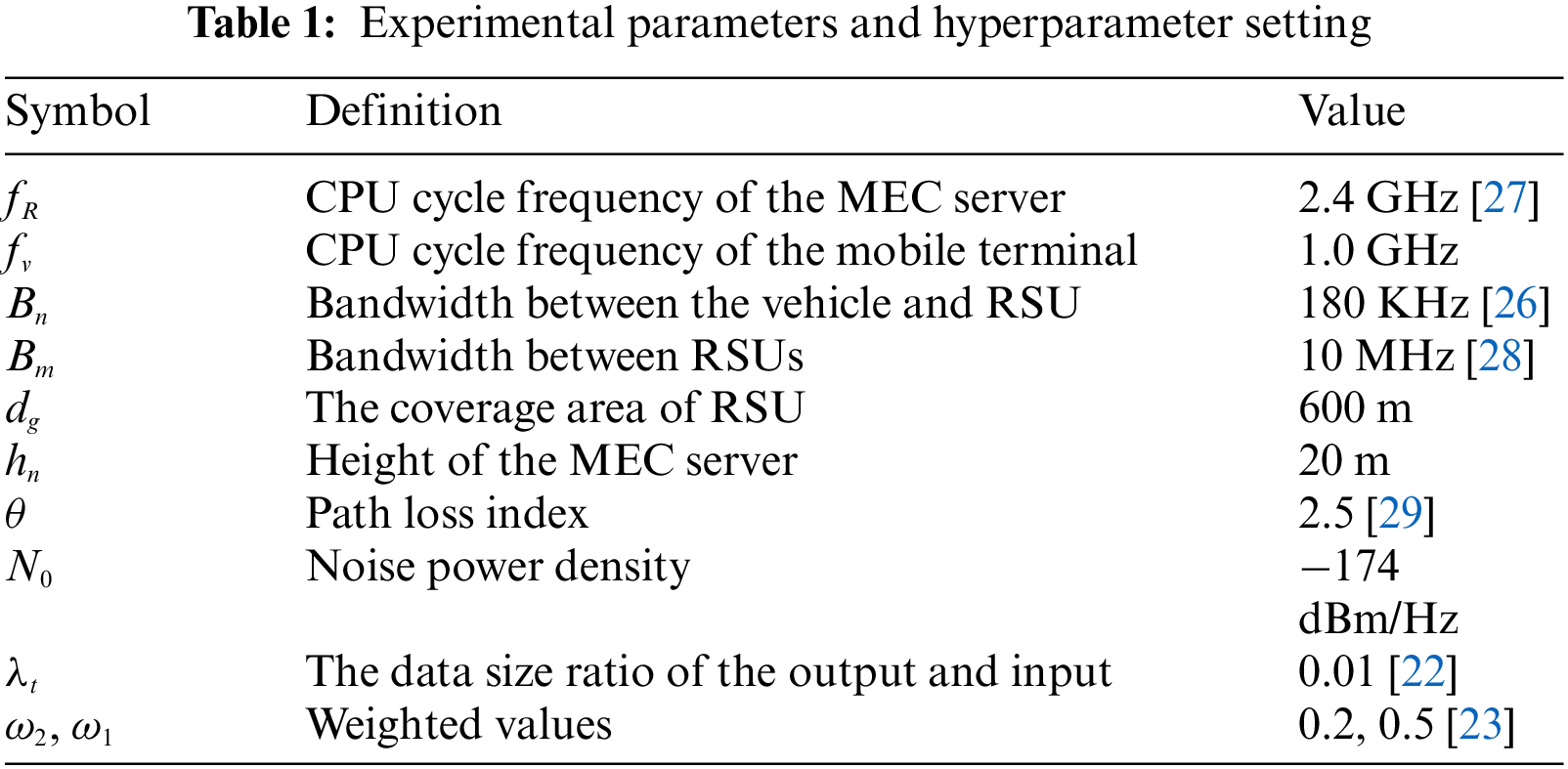
We use TensorFlow2.0 for simulation on a Python 3.7-based simulator. Table 1 lists relevant parameters and super parameters in the simulation. To validate the efficiency of the first stage algorithm, we use several algorithms for comparison: (1) FAJORA [26]: The size of block is fixed; (2) FBT [21]: The block interval is fixed.
At the same time, to validate the performance of the second stage algorithm, the following comparison algorithms are selected: (1) JCCR [23]: A joint allocation scheme of computing and communication resources is proposed by optimizing the offloading ratio in the process of computing offload, but the load difference of cluster MEC servers is not considered; (2) RAB: A resource allocation scheme for collaborative offloading, but with binary offloading; (3) Simulated annealing algorithm (SA): Obtain a near-optimal solution through reducing the temperature parameter from its initial parameter in polynomial time.
This part compares the performance of the above algorithms and analyze the influence of different parameter settings.
Fig. 3 shows the learning curve based on A3C, in which we compare the changes in the reward and loss function of the proposed algorithm in different stages with other comparison algorithms. From Figs. 3a and 3c, it can be found that the proposed algorithm has the highest reward, and its overall performance is better than the other two algorithms. Figs. 3b and 3d show that the loss function of the proposed algorithm converges faster and has better robustness.
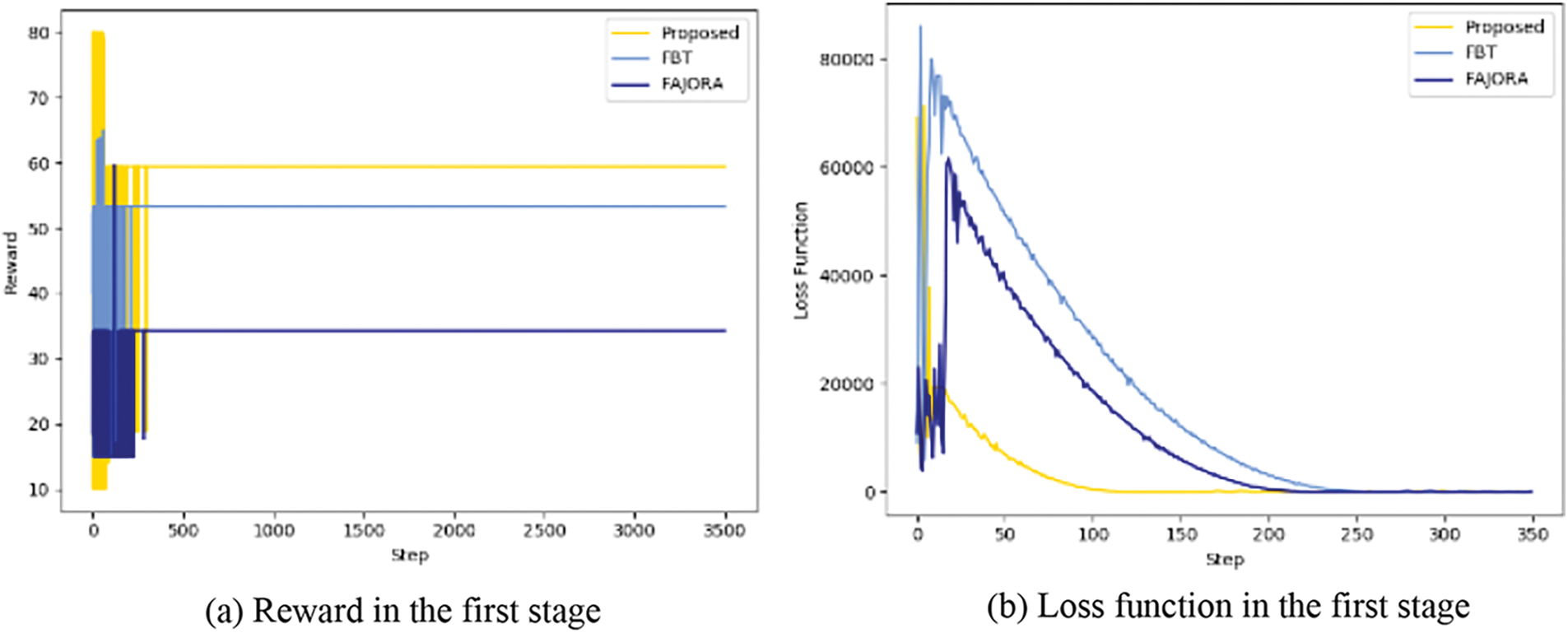
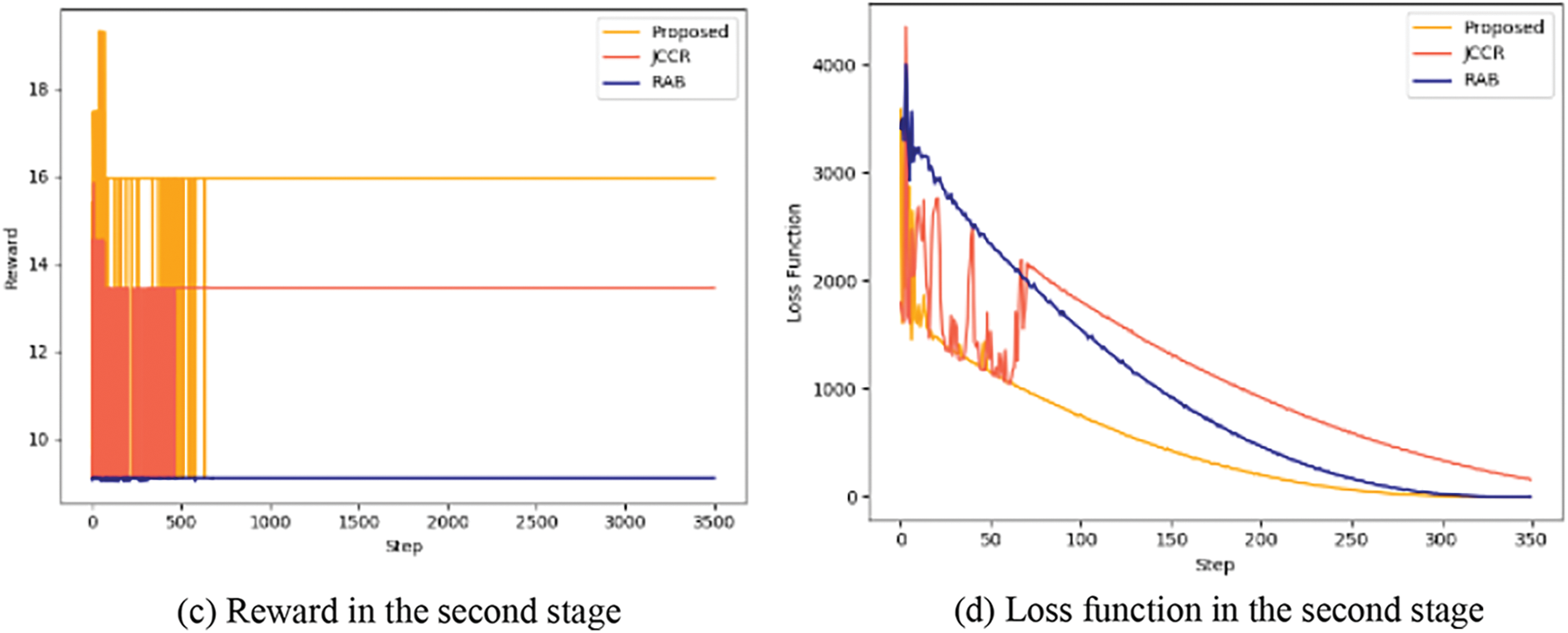
Figure 3: The learning curve of the DRL-based methods
Fig. 4 compares the effects of block size and block interval on the reward under FAJORA, FBT, and the proposed algorithm. As we can see from Fig. 4a, except for the FAJORA, when block size increases, the reward increases slowly accordingly. Meanwhile, Fig. 4b illustrate that, except for FBT, as block interval increases, the reward decreases accordingly. This is because the impact of block interval on transaction throughput is inverse, while the impact of block size is positive, which has an impact on the reward. And the proposed algorithm has better performance, it is because the size of blocks algorithm is the same in the FAJORA, and the block interval is the same in the FBT, which affects the transaction throughput of the blockchain.
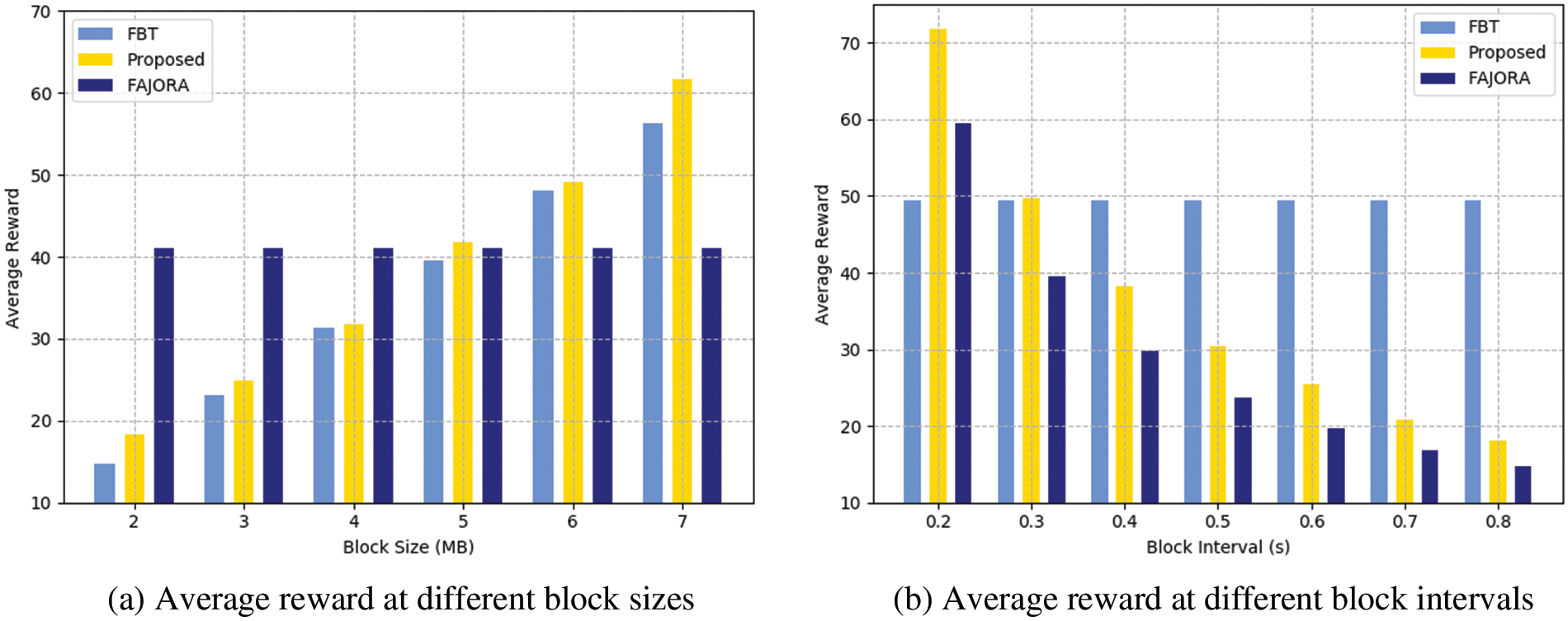
Figure 4: Influence of block size and block interval on reward
We can see the variation of the system’s total delay under different CPU cycle frequency
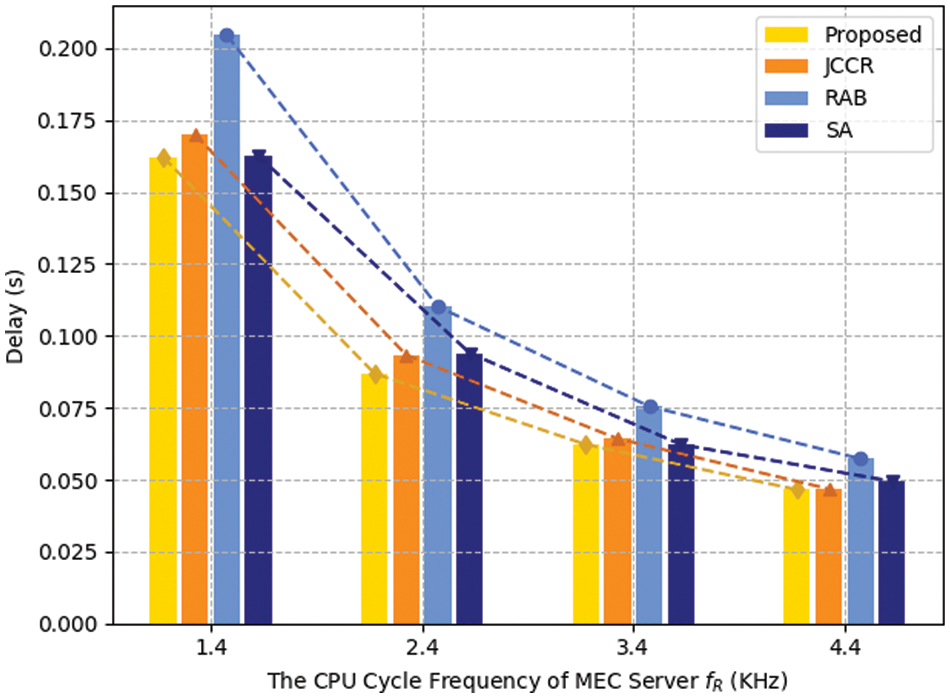
Figure 5: The effect of CPU cycle frequency
From Fig. 6, we can see the impact of different data sizes of tasks on the average reward and the offloading ratio in the proposed algorithm. Fig. 6 shows that, as the
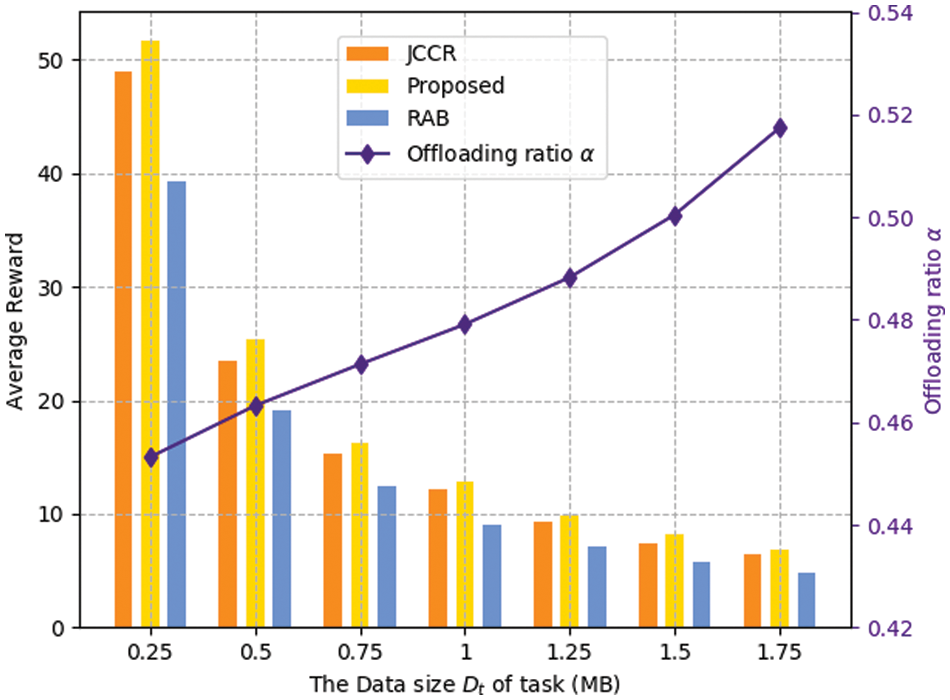
Figure 6: The change of average reward and offloading ratio under different data sizes
To solve the security problems in vehicular networks, we propose a trusted edge resource allocation framework for assisted driving service, which includes two stages: the blockchain generation stage and assisted driving service stage. The framework improves the transaction throughput of the blockchain and reduces total latency of the transportation system by establishing the delay-and-throughput-oriented block generation model for mobile terminals. At the same time, we design a balanced offloading algorithm for assisted driving service based on edge collaboration to realize the balanced offloading of the cluster MEC servers. Simulation results show that our algorithm performs better than compared algorithms in average delay. In future work, we will study differentiated service processing to be suitable for more application scenarios, such as IoT, and industrialization scenarios.
Acknowledgement: Thanks for the technical support provided by the State Key Laboratory of Networking and Switching Technology.
Funding Statement: This work has been supported by State Grid Corporation of China Science and Technology Project “Key Technology and Application of New Multi-Mode Intelligent Network for State Grid” (5700-202024176A-0-0-00).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Yuxuan Zhong, Siya Xu, Boxian Liao; data collection: Jizhao Lu, Huiping Meng; analysis and interpretation of results: Zhili Wang, Xingyu Chen; draft manuscript preparation: Boxian Liao, Qinghan Li. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: If readers are interested in the experimental data, you can contact with the email: xxuan@bupt.edu.cn.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. J. Yin, B. Chen, K. R. Lai and Y. Li, “Automatic dangerous driving intensity analysis for advanced driver assistance systems from multimodal driving signals,” IEEE Sensors Journal, vol. 18, no. 12, pp. 4785–4794, 2018. [Google Scholar]
2. Y. Yao, X. Chang, J. Mišić, V. B. Mišić and L. Li, “BLA: Blockchain-assisted lightweight anonymous authentication for distributed vehicular fog services,” IEEE Internet of Things Journal, vol. 6, no. 2, pp. 3775–3784, 2019. [Google Scholar]
3. J. Feng, Z. Liu, C. Wu and Y. Ji, “AVE: Autonomous vehicular edge computing framework with ACO-based scheduling,” IEEE Transactions on Vehicular Technology, vol. 66, no. 12, pp. 10660–10675, 2017. [Google Scholar]
4. Y. Xing, C. Lv, Z. Zhang, H. Wang, X. Na et al., “Identification and analysis of driver postures for in-vehicle driving activities and secondary tasks recognition,” IEEE Transactions on Computational Social Systems, vol. 5, no. 1, pp. 95–108, 2018. [Google Scholar]
5. Z. Lu, W. Liu, Q. Wang, G. Qu and Z. Liu, “A privacy-preserving trust model based on blockchain for VANETs,” IEEE Access, vol. 6, pp. 45655–45664, 2018. [Google Scholar]
6. I. Sorkhoh, D. Ebrahimi, R. Atallah and C. Assi, “Workload scheduling in vehicular networks with edge cloud capabilities,” IEEE Transactions on Vehicular Technology, vol. 68, no. 9, pp. 8472–8486, 2019. [Google Scholar]
7. F. Wael, “A lightweight vehicle detection and tracking technique for advanced driving assistance systems,” Journal of Intelligent and Fuzzy Systems, vol. 39, no. 3, pp. 2693–2710, 2020. [Google Scholar]
8. M. J. Fazel Ashrafi, S. Yousefi, H. Karimi, S. M. Hosseini, H. Rostami et al., “Highway chain collision avoidance using inter-vehicular communications,” in ICCKE 2013, Mashhad, Iran, pp. 135–140, 2013. [Google Scholar]
9. R. Zhang, K. Cai and Y. Huang, “Scheme of autonomous vehicle abnormal behavior detection technology based on edge computing,” in Proc. of HPCCT & BDAI ’20, Qingdao, China, pp. 131–136, 2020. [Google Scholar]
10. X. Wang, X. She, L. Bai, Y. Qing and F. Jiang, “A novel anonymous authentication scheme based on edge computing in Internet of Vehicles,” Computers, Materials & Continua, vol. 67, no. 3, pp. 3349–3361, 2021. [Google Scholar]
11. P. Wang and W. Susilo, “Data security storage model of the Internet of Things based on blockchain,” Computer Systems Science and Engineering, vol. 36, no. 1, pp. 213–224, 2021. [Google Scholar]
12. H. Bai, C. Wu, Y. Yang, G. Xia and Y. Jiang, “A blockchain-based traffic conditions and driving behaviors warning scheme in the Internet of Vehicles,” in 2019 IEEE 19th Int. Conf. on Communication Technology (ICCT), Xi’an, China, pp. 1160–1164, 2019. [Google Scholar]
13. Z. Yang, K. Yang, L. Lei, K. Zheng and V. C. M. Leung, “Blockchain-based decentralized trust management in vehicular networks,” IEEE Internet of Things Journal, vol. 6, no. 2, pp. 1495–1505, 2019. [Google Scholar]
14. D. Zheng, C. Jing, R. Guo, S. Gao and L. Wang, “A traceable blockchain-based access authentication system with privacy preservation in VANETs,” IEEE Access, vol. 7, pp. 117716–117726, 2019. [Google Scholar]
15. Y. Xu, Z. Jin, X. Zhang and L. Zhang, “An optimization scheme for task offloading and resource allocation in vehicle edge networks,” Journal of Internet of Things, vol. 2, no. 4, pp. 163–173, 2020. [Google Scholar]
16. J. Almutairi and M. Aldossary, “Resource management and task offloading issues in the edge-cloud environment,” Intelligent Automation & Soft Computing, vol. 30, no. 1, pp. 129–145, 2021. [Google Scholar]
17. A. Xiong, M. Chen, S. Guo, Y. Li, Y. Zhao et al., “An energy aware algorithm for edge task offloading,” Intelligent Automation & Soft Computing, vol. 31, no. 3, pp. 1641–1654, 2022. [Google Scholar]
18. J. Zhao, Q. Li, Y. Gong and K. Zhang, “Computation offloading and resource allocation for cloud assisted mobile edge computing in vehicular networks,” IEEE Transactions on Vehicular Technology, vol. 68, no. 8, pp. 7944–7956, 2019. [Google Scholar]
19. A. Boukerche and V. Soto, “An efficient mobility-oriented retrieval protocol for computation offloading in vehicular edge multi-access network,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 6, pp. 2675–2688, 2020. [Google Scholar]
20. C. Yang, Y. Liu, X. Chen, W. Zhong and S. Xie, “Efficient mobility-aware task offloading for vehicular edge computing networks,” IEEE Access, vol. 7, pp. 26652–26664, 2019. [Google Scholar]
21. J. Feng, F. Richard Yu, Q. Pei, X. Chu, J. Du et al., “Cooperative computation offloading and resource allocation for blockchain-enabled mobile-edge computing: A deep reinforcement learning approach,” IEEE Internet of Things Journal, vol. 7, no. 7, pp. 6214–6228, 2020. [Google Scholar]
22. Q. Wang, S. Shao, S. Guo, X. Qiu and Z. Wang, “Task allocation mechanism of power Internet of Things based on cooperative edge computing,” IEEE Access, vol. 8, pp. 158488–158501, 2020. [Google Scholar]
23. J. Wang, D. Feng, S. Zhang, J. Tang and T. Q. S. Quek, “Computation offloading for mobile edge computing enabled vehicular networks,” IEEE Access, vol. 7, pp. 62624–62632, 2019. [Google Scholar]
24. Z. Tong, X. Deng, F. Ye, S. Basodi, X. Xiao et al., “Adaptive computation offloading and resource allocation strategy in a mobile edge computing environment,” Information Sciences, vol. 537, no. 2, pp. 116–131, 2020; [Google Scholar]
25. V. Mnih, A. P. Badia, M. Mirza, A. Graves, T. Lillicrap et al., “Asynchronous methods for deep reinforcement learning,” in Int. Conf. on Machine Learning, New York, USA, pp. 1928–1937, 2016. [Google Scholar]
26. J. Du, L. Zhao, X. Chu, F. R. Yu, J. Feng et al., “Enabling low-latency applications in LTE-A based mixed fog/cloud computing systems,” IEEE Transactions on Vehicular Technology, vol. 68, no. 2, pp. 1757–1771, 2019. [Google Scholar]
27. Y. Kim, H. Lee and S. Chong, “Mobile computation offloading for application throughput fairness and energy efficiency,” IEEE Transactions on Wireless Communications, vol. 18, no. 1, pp. 3–19, 2019. [Google Scholar]
28. Y. Dai, D. Xu, S. Maharjan and Y. Zhang, “Joint load balancing and offloading in vehicular edge computing and networks,” IEEE Internet of Things Journal, vol. 6, no. 3, pp. 4377–4387, 2019. [Google Scholar]
29. B. Zhang, X. Jia, K. Yang and R. Xie, “Design of analytical model and algorithm for optimal roadside AP placement in VANETs,” IEEE Transactions on Vehicular Technology, vol. 65, no. 9, pp. 7708–7718, 2016. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools