
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Automated Pavement Crack Detection Using Deep Feature Selection and Whale Optimization Algorithm
Faculty of Engineering, China University of Geosciences, Wuhan, 430074, China
* Corresponding Author: Li Wu. Email:
(This article belongs to the Special Issue: Machine Vision Detection and Intelligent Recognition)
Computers, Materials & Continua 2023, 77(1), 63-77. https://doi.org/10.32604/cmc.2023.042183
Received 22 May 2023; Accepted 29 August 2023; Issue published 31 October 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Pavement crack detection plays a crucial role in ensuring road safety and reducing maintenance expenses. Recent advancements in deep learning (DL) techniques have shown promising results in detecting pavement cracks; however, the selection of relevant features for classification remains challenging. In this study, we propose a new approach for pavement crack detection that integrates deep learning for feature extraction, the whale optimization algorithm (WOA) for feature selection, and random forest (RF) for classification. The performance of the models was evaluated using accuracy, recall, precision, F1 score, and area under the receiver operating characteristic curve (AUC). Our findings reveal that Model 2, which incorporates RF into the ResNet-18 architecture, outperforms baseline Model 1 across all evaluation metrics. Nevertheless, our proposed model, which combines ResNet-18 with both WOA and RF, achieves significantly higher accuracy, recall, precision, and F1 score compared to the other two models. These results underscore the effectiveness of integrating RF and WOA into ResNet-18 for pavement crack detection applications. We applied the proposed approach to a dataset of pavement images, achieving an accuracy of 97.16% and an AUC of 0.984. Our results demonstrate that the proposed approach surpasses existing methods for pavement crack detection, offering a promising solution for the automatic identification of pavement cracks. By leveraging this approach, potential safety hazards can be identified more effectively, enabling timely repairs and maintenance measures. Lastly, the findings of this study also emphasize the potential of integrating RF and WOA with deep learning for pavement crack detection, providing road authorities with the necessary tools to make informed decisions regarding road infrastructure maintenance.Keywords
Pavement crack detection is a crucial task in transportation engineering and is essential for maintaining road safety and reducing maintenance costs [1]. Pavement cracks indicate the pavement’s structural integrity and can cause accidents, damage vehicles, and reduce the road’s lifespan [2]. Recently, there has been a growing interest in developing automated pavement crack detection systems using deep learning techniques [3,4]. DL is a subset of machine learning that uses artificial neural networks to learn from data and extract relevant features for classification [5]. The importance of automated pavement crack detection systems lies in their ability to reduce the time and cost associated with manual pavement inspection [6]. Manual pavement inspection is a time-consuming and labor-intensive task, and the human eye can miss small cracks that are not easily visible to the naked eye [7]. Automated pavement crack detection systems can improve the accuracy and speed of pavement inspection and help transportation agencies identify and repair pavement cracks before they become a safety hazard [8,9].
Several studies have been conducted on pavement crack detection using deep learning techniques [5–9]. These studies have demonstrated the effectiveness of deep learning in detecting pavement cracks and have achieved high accuracy rates. However, selecting relevant features for classification remains a challenge in pavement crack detection using deep learning [10]. Feature selection is a crucial step in machine learning, as it helps reduce the input data’s dimensionality and improve the classification model’s accuracy [11]. Feature selection involves identifying informative attributes, while feature extraction transforms raw data into a representative representation. Both processes are crucial for enhancing machine learning models’ performance for the classification task.
Despite the growing interest in pavement crack identification DL methods, there is a lack of research on feature selection using WOA in this field. Existing studies on pavement crack detection using deep learning have focused on feature extraction using numerous DL methods, like convolutional neural networks (CNN) [12], autoencoders [13,14], and deep belief networks [15]. However, selecting relevant features for classification remains a challenge in pavement crack detection, and this field has not explored the use of WOA for feature selection. Feature selection and feature extraction are fundamental processes in developing effective detection systems. Feature selection aims to identify a subset of relevant features from a larger feature set, eliminating redundant or irrelevant information. This process reduces dimensionality, enhances computational efficiency, and improves classification performance by focusing on the most informative features. On the other hand, feature extraction involves transforming raw data into a new set of representative features that capture essential characteristics of the input data.
Metaheuristic algorithms are optimization algorithms that can solve complex engineering problems involving nonlinear functions, multiple objectives, and large solution spaces [16–18]. These algorithms are often inspired by natural phenomena, such as the behavior of ants, bees, and birds, or even the physical properties of liquids and gases. In civil engineering, metaheuristic algorithms have been widely used to solve various optimization problems related to transportation [19], structural [20], and geotechnical engineering [21]. One of the gains of metaheuristic algorithms is their ability to search for global optimal solutions in large solution spaces. This is particularly useful in civil engineering applications, where the search space can be extremely large and complex. Metaheuristic algorithms can also handle multiple objectives and constraints, which are common in civil engineering optimization problems [19–21]. For instance, some commonly used metaheuristic algorithms for feature selection are Particle Swarm Optimization (PSO), Genetic Algorithms (GA), and Differential Evolution (DE) and WOA. However, WOA exhibits several advantages over commonly used metaheuristic algorithms for feature selection. Firstly, WOA’s exploration and exploitation balance, inspired by the social behavior of humpback whales, enables efficient global search in high-dimensional feature spaces, making it more effective in handling complex and non-linear optimization landscapes. Secondly, WOA’s faster convergence and reduced computational overhead outperform PSO, GA, and DE making it a more efficient choice for feature selection tasks, especially in large-scale dataset.
Additionally, WOA is a nature-inspired optimization algorithm that mimics the hunting behavior of humpback whales [22]. WOA has been shown to be effective in solving optimization problems, including feature selection in machine learning. The combination of deep learning for feature extraction and WOA for feature selection has been shown to enhance the accuracy of classification models in several applications, including medical diagnosis, fault diagnosis, and image classification [23,24].
In this study, we propose a new approach for pavement crack detection that combines deep learning for feature extraction, WOA for feature selection, and random forest classification. The proposed approach aims to improve the accuracy of pavement crack detection and reduce the time and cost associated with manual pavement inspection. This study aims to evaluate the proposed approach’s performance and compare it with existing methods for pavement crack identification utilizing DL. Finally, the results of this work are expected to provide a promising solution for the automatic detection of pavement cracks and help transportation agencies identify and repair pavement cracks before they become a safety hazard.
The paper presents a comprehensive study on road pavement and cracking detection, a critical civil engineering problem. Section 1 provides an overview of pavement and cracking detection background, highlighting the need for accurate and efficient prediction models. Section 2 presents an extensive literature review and discusses the current state-of-the-art pavement recognition methods, outlining their strengths, weaknesses, and limitations. Section 3 describes this research methodology and outlines the proposed pavement detection model, incorporating deep learning and feature selection techniques for improved accuracy and efficiency. Section 4 attends to the results and analysis of the proposed model, demonstrating its effectiveness in accurately detecting pavement. Finally, Section 5 concludes the study and provides insights for future work, highlighting the potential for further research in this domain, such as developing hybrid models that combine multiple detection techniques for improved performance.
Image processing techniques, including DL, be an effective method for identifying pavement distresses [4]. Deep learning has become gradually widespread due to its excellent ability to process and classify images using CNNs [12]. Compared to other deep learning architectures, CNNs have proven to be superior in image processing and classification tasks, as they can perform sparse processing and extraction on a layer-by-layer basis [13–15]. One advantage of DL-based methods, such as CNNs, for pavement distress detection is their ability to extract meaningful features from raw data. Meaningful features are the subset of image characteristics or descriptors with significant discriminative power for accurately detecting and classifying pavement cracks. These features capture relevant information related to crack morphology, texture, intensity, or other pertinent attributes that contribute to the differentiation between cracks and non-crack areas. This contrasts with individually created features that are typically used in other approaches. Furthermore, the structure of deep learning models allows for feature extraction and prediction to be performed concurrently within a single body block, which can result in improved accuracy and efficiency in pavement distress detection.
In order to train CNN networks for pavement distress detection, the procedure of regular error back-propagation can be utilized. This technique is simpler than other types of deep and unidirectional neural networks, as CNNs possess fewer optimal parameters [12]. Additionally, CNNs have been shown to be easier to train than other types of neural networks due to their architecture and parameter optimization methods. Besides, deep learning and CNNs have significant potential for detecting pavement distresses through image processing [13]. However, further research is needed to optimize the performance of CNNs for pavement distress detection and fully understand their capabilities and limitations in this application. Additionally, developing new techniques that integrate deep learning with other image-processing methods may further improve the accuracy and efficiency of pavement distress detection [14,15].
To date, researchers have employed a variety of approaches, including supervised and unsupervised learning techniques, DL-based methods, and metaheuristic algorithms, among others, to detect and classify pavement distress [3–5]. These techniques have been used to extract features from pavement images, which are then used to train machine learning models to classify different pavement distresses [6–11].
Moreover, researchers have also explored using multiple datasets to enhance the accuracy and robustness of pavement distress identification models. These datasets have been collected using various sensors, including high-resolution cameras, LiDAR, and GPS. In addition, researchers have also investigated the use of different pavement surface types, such as asphalt and concrete, to evaluate the effectiveness of different pavement distress detection algorithms [25–27].
Despite the progress made in pavement and cracking detection, some research gaps still need to be addressed. For instance, the development of more accurate and efficient feature extraction techniques, as well as the integration of multiple data sources [28], could further enhance the performance and robustness of pavement distress identification models [29]. Additionally, developing real-time asphalt distress identification systems could help identify and address pavement distresses before they become severe, thereby reducing maintenance costs and enhancing road safety [30].
For instance, Nguyen et al. [12] presented a road surface cracking recognition approach utilizing Convolutional Neural Networks (CNN). The researchers utilized a dataset of road pavement images and trained CNN to identify cracks in the pavement. They evaluated the performance of the suggested method by calculating precision, recall, and F1 score. Liu et al. [27] suggested an automated pavement crack recognition and segmentation method via a two-step CNN. The first step of the CNN detected potential cracks using a patch-based CNN, and the second step refined the segmentation results using a fully convolutional neural network. The proposed method was tested on a publicly available pavement crack dataset and outperformed existing methods in terms of accuracy, precision, recall, and F1 score. The study confirms the capability of using DL-based methods for automated pavement crack detection and segmentation. Thus, this study was motivated by the remarkable results obtained by deep CNN and used for feature extraction and use WOA for feature selection and a strong classifier for classification to enhance the limited performance of concrete recognition in the literature.
In this section, we outline the methodology employed to accomplish the primary objective of this study, namely, the detection of pavement cracks using deep learning techniques. Fig. 1 provides an overview of the proposed method for achieving this objective. The prediction pipelines have four crucial stages: benchmark data collection, pre-processing, modeling prediction, and result analysis. Each of these steps and the techniques employed are discussed briefly in the following subsections.

Figure 1: Proposed pavement detection approach
The dataset utilized in this study comprises 30,000 images depicting concrete and pavement surfaces, categorized into two classes, namely “crack” and “non-crack”. These images are distributed across two folders, “positive” and “negative”, each containing images of cracked and non-cracked concrete surfaces, respectively. The image data is in JPEG format, with a 227 × 227 pixels resolution in RGB format. The dataset serves as a critical input to the pavement and concrete surface inspection system, contributing significantly to the field of automated pavement and crack detection. Fig. 2 shows some samples of pavement cracking from the dataset used in this study.

Figure 2: Samples of pavement and cracking
In the field of pavement and cracking detection, numerous techniques are available for information extraction from datasets. However, conventional techniques often result in a feature space that contains redundant information. In this work, we have implemented convolutional neural network (CNN) architectures for feature extraction, which have been shown to be effective in extracting relevant features from images. Data augmentation techniques have been applied prior to feature extraction to prevent overfitting of the training data and to increase the number of training samples. The augmentation process has been guided by enhancing contrasting features between the various classes, thus leading to a more distinct classification output. In addition, to ensure unambiguous input samples, a sharpness improviser (as shown in Fig. 3) has also been employed.

Figure 3: The augmentation process applied in this study
3.2.1 Feature Extraction Using ResNet-18 Architecture
In this study, deep feature extraction was performed using a pre-trained model for 2-class tasks. The ResNet-18 model is trained for 40 epochs utilizing the Adam optimizer and cross-entropy loss calculation. The learning rate of 0.0001 is set via Adam for each epoch. The ResNet-18 model weights were stored and stocked in evaluation mode to produce feature space for validation and test sets. The flattened vector-based pre-final layer is extracted for feature generation for each image. Therefore, the ResNet-18 architecture illustrates the original operations immersed in training the model, as depicted in Fig. 4. The class number in the source dataset is denoted by N. For the 2-class categorization problem, ResNet-18 generated 1024 significant features with less time complexity in terms of time. Consequently, a vector of length 1024 was produced for each image and row-wise concatenated to generate the feature space with lengths R * 1024. This approach aimed to produce a compact feature space with optimal pavement and cracking detection performance.

Figure 4: ResNet-18 model used for feature selection
3.2.2 Whale Optimization Algorithm (WOA)
The whale Optimization Algorithm (WOA) is a nature-inspired optimization algorithm that imitates the hunting behavior of humpback whales. It is a metaheuristic algorithm that has been used in various optimization problems, including feature selection. In feature selection, WOA works by assigning a fitness score to each candidate subset of features and then iteratively improving the subset by simulating the hunting behavior of whales. The method starts by randomly initializing a population of candidate subsets and then evaluates their fitness using a suitable performance metric, such as accuracy or F1 score. In each iteration, the algorithm updates the position of each whale by three operators: search, encircle, and bubble-net. The search operator mimics a whale’s behavior of searching for prey by moving towards a random direction. The encircle operator simulates the behavior of whales encircling a school of fish and updates the best solution position found so far. The bubble-net operator models the behavior of whales creating a bubble-net to catch fish, and it aims to explore new solutions by generating random perturbations around the current position. After a certain number of iterations, WOA returns the subset with the highest fitness score as the selected features for classification. These selected features can then be fed into a classification algorithm like Random Forest to train a predictive model. The proposed optimization algorithm.

During the WOA exploration phase, the variation of
The Sigmoid function is utilized as the transferal function to map the continuous search of WOA to binary search, thereby making it applicable to the feature selection problems. The Sigmoid function is given by:
In addition to the previous information, it is essential to note that the fitness function utilized to evaluate a candidate solution “C” of dimension “Dim” in the population is essential for the optimization process the fitness function utilized in this study is defined by Eq. (4). Within the equation, “FeatSel (C)” denotes the number of features selected by the candidate solution C, while “accu (C)” represents the classification accuracy achieved by the candidate solution. The fitness function is computed as a weighted sum by incorporating both the fraction of non-selected features and the accuracy. Consequently, the optimization problem seeks to maximize the fitness function to achieve optimal results. The weight γ used in the fitness function plays a crucial role in balancing the accuracy and the number of selected features. After conducting several experiments, the value of γ has been set to 0.7 for this study. This value has been determined based on the performance of the algorithm in achieving the desired accuracy and reducing the number of selected features.
RF is an ensemble-based learning algorithm that constructs multiple decision trees and chains their estimates to enhance classifier performance and reduce overfitting. In RF, each decision-based tree is trained on a randomly chosen subset of features from the original dataset, and the final prediction is made by aggregating all the trees’ predictions. This approach helps to reduce variance and improve generalization performance, making Random Forest a popular choice for classification tasks.
By using deep learning for feature extraction and combining WOA for feature selection and Random Forest for classification, the proposed work can achieve a more efficient and accurate predictive model by selecting the most relevant features and reducing overfitting.
3.4 Evaluation of Model Performance
In this work, the effectiveness of the proposed pavement and cracking detector model is evaluated using various performance measures to assess its ability to detect cracks in pavement surfaces accurately. It is crucial to review the standard evaluation measures used in the scientific community to grasp the performance of the presented model. The most widely utilized evaluation measures in the literature are as follows:
• Accuracy measure: This formula gives the proportion of correct predictions made by the model out of all predictions made. It is a commonly used measure of performance for classification models.
where:
True Positive: The count of accurately identified pavement cracking instances.
True Negative: The count of accurately identified non-pavement cracking instances.
False Positive: The count of incorrectly identified pavement cracking instances.
False Negative: The count of incorrectly identified non-pavement cracking instances.
• The precision measure is a commonly used evaluation metric in pavement crack detection to assess the model’s accuracy in correctly identifying positive samples. It measures the fraction of relevant cracks among the True Positive (TP) and False Positive (FP) instances predicted by the model. Precision is calculated as the ratio of TP instances to the total instances classified as positive (TP + FP). A high precision score indicates that the model has a low rate of misclassifying non-crack instances as cracks, thereby achieving a high level of accuracy in identifying true cracks in pavement surfaces. Precision can be combined with other evaluation metrics like recall, F1 score, and accuracy to evaluate the performance of pavement crack detection models comprehensively.
• Recall measure computes the ratio of total relevant pavement cases retrieved relative to the total number of non-pavement cases.
• F-measure combines accuracy and recalls into a single metric to capture both properties.
Utilizing the performance evaluation measures mentioned above, the proposed detector model performance was evaluated, and the results have been compared to the performance of similar models described in related literature. This evaluation aims to determine the effectiveness of the optimized model compared to previous approaches and provide insight into potential improvements that can be made to future models.
This section presents and discusses the results obtained from our three developed deep-learning models for pavement detection in road images. We employed two crucial evaluation metrics, namely the receiver operating characteristics (ROC) curve and the precision-recall curve, to assess the performance of our models. The ROC curve visually illustrates the balance between true positive and false-positive rates. A distinct set of test data, unrelated to the training phase, was used to ensure the models’ generalization capabilities. This approach ensures unbiased and dependable outcomes. The subsequent discussion elaborates on the results obtained in this study.
4.1 Receiver Operating Characteristics Curve (ROC)
This section outlines the importance of the Area Under the Curve (AUC) as an evaluation metric for classifiers, particularly in the context of binary classification problems. A higher AUC value indicates better classification performance in terms of distinguishing positive and negative samples. The trade-off between the genuine positive rate and the false positive rate is graphically depicted by the ROC curve, with the AUC being a summary statistic of the ROC curve. The ROC curve is a useful tool in evaluating the performance of a classifier by providing insights into the trade-offs between costs and benefits. The ratio of false positives to all the negative samples is used to compute the false positive rate, representing the cost of the classifier’s false positive predictions. On the other hand, the true positive rate, defined as the proportion of positive cases correctly identified, represents the benefits of the classifier’s true positive predictions. Therefore, a high true positive rate and a low false positive rate are desired in a classifier, resulting in a higher AUC value. Fig. 5 shows the AUC curve of ResNet-18, WOA and RF model and Fig. 6 shows the training and validation curves of the proposed model.
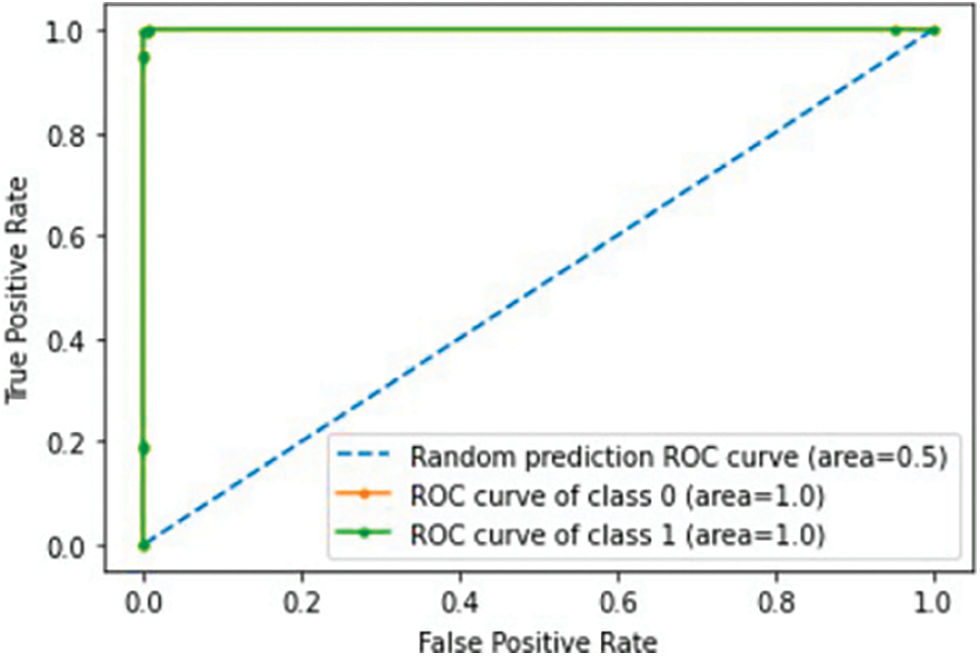
Figure 5: AUC curve of ResNet-18, WOA and RF model

Figure 6: Training and validation curves of the proposed ResNet-18, WOA, and RF model
Table 1 compares three different models for image classification using the ResNet-18 architecture with various feature counts and additional techniques, including Random Forest (RF) and the WOA. The evaluation measures for the models include accuracy, recall, precision, F1 score, and AUC.

Model 1, which is ResNet-18 without any additional techniques, achieves an accuracy of 0.9034, recall of 0.9056, precision of 0.9052, F1 score of 0.9190, and AUC of 0.9072. Model 2, which incorporates RF into ResNet-18, achieves higher accuracy, recall, precision, F1 score, and AUC than Model 1, with values of 0.9239, 0.9667, 0.9331, 0.9231, and 0.9431, respectively.
The proposed model, which combines ResNet-18 with both WOA and RF, achieves significantly higher accuracy, recall, precision, and F1 score than the other two models, with values of 0.9716, 0.9889, 0.9524, and 0.96091, respectively. However, the proposed model’s AUC value is slightly lower than that of Model 2, with a value of 0.9594. Overall, the proposed model with ResNet-18, WOA, and RF shows superior performance in terms of four evaluation measures listed in Table 1. However, the decision to use this model over others may depend on the specific application and the importance of the AUC value.
When evaluating the performance of prediction models in pavement crack identification, accuracy and recall are essential measures. Precision tests the relevance of the expected positive outcomes. At the same time, recall measures the model’s ability to predict positive samples and have a high ratio of true positives (high precision) when calculating the most positive type samples in the dataset (high recall). However, when an optimum combination of precision and recall is required, the F1 measure is frequently employed. The F1 score is a model’s harmonic mean of precision and recall scores. Thus, Table 1 shows the comparative analysis of fourteen classical ML classifiers that have been tested and evaluated in their performance compared to the optimized ResNet-18 model for pavement crack detection in terms of Accuracy, AUC, Recall, Precision, and F1. Fig. 7 summarizes the evaluation measures for the proposed three pavement detection models.

Figure 7: Summary of the evaluation measures
The experimental results and findings demonstrate that the model, which combines ResNet-18 with both WOA and RF, achieves significantly better accuracy, recall, precision, and F1 score performance than the other two models. The proposed model achieved an accuracy of 0.9716, recall of 0.9889, precision of 0.9524, and F1 score of 0.96091, while Model 1 achieved an accuracy of 0.9034, recall of 0.9056, precision of 0.9052, and F1 score of 0.9190, and Model 2 achieved an accuracy of 0.9239, recall of 0.9667, precision of 0.9331, and F1 score of 0.9231. However, the AUC value for the proposed model was slightly lower than Model 2, indicating that the model’s performance may depend on the specific application and the importance of the AUC value. Overall, the proposed model’s superior performance suggests that the combination of ResNet-18, WOA, and RF can improve image classification accuracy and has potential for various applications in computer vision.
In our study, we have utilized the WOA for feature selection, and we agree with the reviewer it is important to discuss the advantages of using WOA over other commonly employed metaheuristic algorithms in this context. One key advantage of WOA is its inspiration from the social behavior of humpback whales, allowing it to exhibit certain characteristics beneficial for feature selection tasks. WOA leverages humpback whales’ exploration and exploitation abilities, enabling it to effectively search the feature space and identify an optimal subset of features that contribute significantly to the crack detection process. This ability is particularly valuable in surface crack detection, where selecting relevant features is essential for accurate classification. Compared to other metaheuristic algorithms commonly used in feature selection tasks, such as Genetic Algorithms (GA), Particle Swarm Optimization (PSO), and Ant Colony Optimization (ACO), WOA offers several advantages. Firstly, WOA has a simpler and more intuitive mechanism, which makes it easier to implement and understand. This simplicity can be advantageous in crack detection applications, where interpretability and transparency of the feature selection process are essential. Secondly, WOA exhibits a fast convergence rate, enabling efficient exploration and exploitation of the feature space. This is particularly beneficial in surface crack detection, where timely detection and classification of cracks are crucial for effective maintenance planning and ensuring road safety. The fast convergence rate of WOA allows quicker identification of a subset of features that yield optimal classification performance. Additionally, WOA demonstrates good global search capabilities, allowing it to explore a wide range of feature combinations and search for the most informative features for crack detection. This global search capability helps to mitigate the risk of getting trapped in local optima, which can be a challenge in feature selection tasks.
Hyperparameter tuning is crucial in developing deep learning models for any computer vision task. In this study, we focus on the pavement detection task and propose the use of the Adam optimizer for hyperparameter tuning of the DL models. The Adam optimizer is a popular gradient-based optimization algorithm that has been shown to perform well in deep learning applications. The hyperparameters of the DL model that we tune using the Adam optimizer include the learning rate, number of epochs, batch size, and the number of filters in each convolutional layer. The DL model’s performance is assessed using standard evaluation measures, including accuracy, precision, recall, and F1 score. Hyperparameter tuning is conducted through a grid search approach, where a range of values is defined for each hyperparameter, and the DL model is evaluated for every combination of hyperparameters. We then select the combination of hyperparameters that results in excellent performance based on the evaluation measures. In our approach, grid search involves systematically exploring a predefined range of hyperparameter values for each component of our proposed model. The purpose is to identify the optimal combination of hyperparameters that maximizes the performance metrics.
On the other hand, for WOA, we considered the population size, maximum iterations, exploration, and exploitation parameters, among others. We conducted extensive experiments to determine the optimal values for these parameters, varying the parameter settings within reasonable ranges. We employed performance evaluation metrics, such as convergence rate and solution quality, to guide our parameter-tuning process. Additionally, we consulted existing literature on WOA and other related metaheuristic algorithms to inform our decision-making.
The convergence curve for 2-class classification using the WOA is presented in Fig. 8. The average fitness function is in the range of 49–55, and the number of iterations is 50 with WOA and 20 without WOA. It can be observed from the curve that the WOA algorithm significantly improves the convergence speed compared to the standard algorithm without WOA. The convergence curve starts at a high value and quickly drops, indicating that the algorithm rapidly improves the model’s accuracy. However, after a certain point, the curve flattens out, indicating that further iterations may not lead to significant improvements. Hence, the WOA algorithm proves to be an effective optimization technique for 2-class classification tasks, improving convergence speed and accuracy.

Figure 8: Convergence curve for 2-class classification using a whale optimization algorithm
Surface crack detection is a decisive problem in roadway maintenance, and accurate detection can prevent accidents and increase pavement longevity. In this work, we proposed a new approach for surface crack classification using deep learning and metaheuristic optimization techniques. It anticipated an approach for surface crack detection utilizing ResNet-18 for deep feature extraction, whale optimization-based method for the selection of the optimal subset of features, and random forest for classification. The proposed model outperformed the traditional crack-based identification methods in terms of commonly used evaluation measures in the literature. The proposed approach achieved an impressive accuracy of 97.16% and an AUC of 0.984 on a dataset of pavement images. This indicates the effectiveness of our method in automatic identification of pavement cracks. By leveraging deep learning’s powerful feature extraction, WOA’s optimization capabilities, and RF’s classification robustness, we offer a robust and efficient solution for pavement crack detection, contributing significantly to road safety and maintenance cost reduction. The experimental results demonstrated that the ResNet-18 feature extraction approach with the whale optimization algorithm achieved a high classification performance, which is promising for real-world applications. The proposed approach holds significant implications for road maintenance authorities. By automatically identifying pavement cracks, the method enables timely repairs, reducing potential safety hazards and optimizing maintenance resources. The accurate and efficient detection of road surface defects enhances road safety, ultimately benefitting both commuters and road infrastructure stakeholders. However, it is vital to acknowledge the limitations of our study. Firstly, our approach relies on a specific deep learning model (ResNet-18), and future research could explore the use of other deep learning models for feature extraction and compare their performance with the proposed detector. Secondly, while our proposed detector showed effectiveness for surface crack detection, further investigation is needed to evaluate its performance in detecting defects in other materials or objects. In the future work we aim to explore the generalizability of our model to different types of road surfaces and crack patterns.
Acknowledgement: Not applicable.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: Study conception and design: L. Wu, D. Dong; data collection: Y. Cheng; analysis and interpretation of results: S. Alshawabkeh, L. Li; draft manuscript preparation: S. Alshawabkeh, M. Alanqreh. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used in the study is publicly available in Kaggle (https://www.kaggle.com/datasets/oluwaseunad/concrete-and-pavement-crack-images).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. A. Ji, X. Xue, Y. Wang, X. Luo and W. Xue, “An integrated approach to automatic pixel-level crack detection and quantification of asphalt pavement,” Automation in Construction, vol. 114, pp. 103176, 2020. [Google Scholar]
2. G. Loprencipe and A. Pantuso, “A specified procedure for distress identification and assessment for urban road surfaces based on PCI,” Coatings, vol. 7, no. 5, pp. 65, 2017. [Google Scholar]
3. Q. Mei and M. Gül, “A cost effective solution for pavement crack inspection using cameras and deep neural networks,” Construction and Building Materials, vol. 256, pp. 119397, 2020. [Google Scholar]
4. K. Gopalakrishnan, “Deep learning in data-driven pavement image analysis and automated distress detection: A review,” Data, vol. 3, no. 3, pp. 28, 2018. [Google Scholar]
5. A. Muneer and S. M. Fati, “Efficient and automated herbs classification approach based on shape and texture features using deep learning,” IEEE Access, vol. 8, pp. 196747–196764, 2020. [Google Scholar]
6. M. Gavilán, D. Balcones, O. Marcos, D. Llorca, F. Sotelo et al., “Adaptive road crack detection system by pavement classification,” Sensors, vol. 11, no. 10, pp. 9628–9657, 2011. [Google Scholar]
7. A. Tedeschi and F. Benedetto, “A real-time automatic pavement crack and pothole recognition system for mobile android-based devices,” Advanced Engineering Informatics, vol. 32, pp. 11–25, 2017. [Google Scholar]
8. Y. Hu, C. X. Zhao and H. N. Wang, “Automatic pavement crack detection using texture and shape descriptors,” IETE Technical Review, vol. 27, no. 5, pp. 398–405, 2010. [Google Scholar]
9. T. Saar and O. Talvik, “Automatic asphalt pavement crack detection and classification using neural networks,” in 2010 12th Biennial Baltic Electronics Conf., Tallinn, Estonia, pp. 345–348, 2010. [Google Scholar]
10. F. Yang, L. Zhang, S. Yu, D. Prokhorov, X. Mei et al., “Feature pyramid and hierarchical boosting network for pavement crack detection,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 4, pp. 1525–1535, 2019. [Google Scholar]
11. N. D. Hoang and Q. L. Nguyen, “A novel method for asphalt pavement crack classification based on image processing and machine learning,” Engineering with Computers, vol. 35, pp. 487–498, 2019. [Google Scholar]
12. N. T. H. Nguyen, T. H. Le, S. Perry and T. T. Nguyen, “Pavement crack detection using convolutional neural network,” in Proc. of the 9th Int. Symp. on Information and Communication Technology, New York, NY, USA, pp. 251–256, 2018. [Google Scholar]
13. Y. Tang, A. A. Zhang, L. Luo, G. Wang and E. Yang, “Pixel-level pavement crack segmentation with encoder-decoder network,” Measurement, vol. 184, pp. 109914, 2021. [Google Scholar]
14. R. Augustauskas and A. Lipnickas, “Improved pixel-level pavement-defect segmentation using a deep autoencoder,” Sensors, vol. 20, no. 9, pp. 2557, 2020. [Google Scholar] [PubMed]
15. A. Zhang, K. C. P. Wang, B. Li, E. Yang, X. Dai et al., “Automated pixel-level pavement crack detection on 3D asphalt surfaces using a deep-learning network,” Computer-Aided Civil and Infrastructure Engineering, vol. 32, no. 10, pp. 805–819, 2017. [Google Scholar]
16. I. Naruei and F. Keynia, “Wild horse optimizer: A new meta-heuristic algorithm for solving engineering optimization problems,” Engineering with Computers, vol. 38, no. 4, pp. 3025–3056, 2022. [Google Scholar]
17. A. Askarzadeh, “A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm,” Computers & Structures, vol. 169, pp. 1–12, 2016. [Google Scholar]
18. X. S. Yang, “Bat algorithm for multi-objective optimization,” International Journal of Bio-Inspired Computation, vol. 3, no. 5, pp. 267–274, 2011. [Google Scholar]
19. A. Lashgari, H. Hosseinzadeh, M. Khalilzadeh, B. Milani, A. Ahmadisharaf et al., “Transportation energy demand forecasting in Taiwan based on metaheuristic algorithms,” Energy Sources, Part A: Recovery, Utilization, and Environmental Effects, vol. 44, no. 2, pp. 2782–2800, 2022. [Google Scholar]
20. N. D. Lagaros, V. Plevris and N. A. Kallioras, “The mosaic of metaheuristic algorithms in structural optimization,” Archives of Computational Methods in Engineering, vol. 29, no. 7, pp. 5457–5492, 2022. [Google Scholar]
21. J. S. Chou and J. P. P. Thedja, “Metaheuristic optimization within machine learning-based classification system for early warnings related to geotechnical problems,” Automation in Construction, vol. 68, pp. 65–80, 2016. [Google Scholar]
22. S. Mirjalili and A. Lewis, “The whale optimization algorithm,” Advances in Engineering Software, vol. 95, pp. 51–67, 2016. [Google Scholar]
23. M. Q. Tran, M. Elsisi and M. K. Liu, “Effective feature selection with fuzzy entropy and similarity classifier for chatter vibration diagnosis,” Measurement, vol. 184, pp. 109962, 2021. [Google Scholar]
24. P. Bansal, K. Gehlot, A. Singhal and A. Gupta, “Automatic detection of osteosarcoma based on integrated features and feature selection using binary arithmetic optimization algorithm,” Multimedia Tools and Applications, vol. 81, no. 6, pp. 8807–8834, 2022. [Google Scholar] [PubMed]
25. T. B. Coenen and A. Golroo, “A review on automated pavement distress detection methods,” Cogent Engineering, vol. 4, no. 1, pp. 1374822, 2017. [Google Scholar]
26. Z. Du, J. Yuan, F. Xiao and C. Hettiarachchi, “Application of image technology on pavement distress detection: A review,” Measurement, vol. 184, pp. 109900, 2021. [Google Scholar]
27. J. Liu, X. Yang, S. Lau, X. Wang, S. Luo et al., “Automated pavement crack detection and segmentation based on two-step convolutional neural network,” Computer-Aided Civil and Infrastructure Engineering, vol. 35, no. 11, pp. 1291–1305, 2020. [Google Scholar]
28. A. Dipankar and S. K. Suman, “Pavement crack detection based on a deep learning approach and visualization by using GIS,” International Journal of Pavement Engineering, vol. 24, no. 1, pp. 2173754, 2023. [Google Scholar]
29. P. Sankarasubramanian and E. Ganesh, “An optimal segmentation framework for early crack and fire detection using Potoo swarm optimization algorithm,” Journal of Harbin Engineering University, vol. 44, no. 7, pp. 217–233, 2023. [Google Scholar]
30. P. Lu, K. Ye, T. Jin, Y. Ma, S. Huang et al., “Design method for polyurethane-modified asphalt by using Kriging-Particle swarm optimization algorithm,” Engineering Applications of Artificial Intelligence, vol. 117, pp. 105609, 2023. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools