
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Energy Efficient and Intelligent Mosquito Repellent Fuzzy Control System
1 School of Software, Institute of Electronic and Information Engineering, Xi’an Jiaotong University, Xi’an, China
2 School of Intelligent Manufacturing and Control Engineering, Qilu Institute of Technology, Jinan, 250200, China
3 Department of Medicine, Islam Medical College, Sialkot, Pakistan
4 Department of Electronics, G.C. University, Lahore, Punjab, 54000, Pakistan
* Corresponding Author: Zhu Li. Email:
(This article belongs to the Special Issue: The Next Generation of Artificial Intelligence and the Intelligent Internet of Things)
Computers, Materials & Continua 2023, 77(1), 699-715. https://doi.org/10.32604/cmc.2023.039707
Received 12 February 2023; Accepted 13 June 2023; Issue published 31 October 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Mosquitoes are of great concern for occasionally carrying noxious diseases (dengue, malaria, zika, and yellow fever). To control mosquitoes, it is very crucial to effectively monitor their behavioral trends and presence. Traditional mosquito repellent works by heating small pads soaked in repellant, which then diffuses a protected area around you, a great alternative to spraying yourself with insecticide. But they have limitations, including the range, turning them on manually, and then waiting for the protection to kick in when the mosquitoes may find you. This research aims to design a fuzzy-based controller to solve the above issues by automatically determining a mosquito repellent’s speed and active time. The speed and active time depend on the repellent cartridge and the number of mosquitoes. The Mamdani model is used in the proposed fuzzy system (FS). The FS consists of identifying unambiguous inputs, a fuzzification process, rule evaluation, and a defuzzification process to produce unambiguous outputs. The input variables used are the repellent cartridge and the number of mosquitoes, and the speed of mosquito repellent is used as the output variable. The whole FS is designed and simulated using MATLAB Simulink R2016b. The proposed FS is executed and verified utilizing a microcontroller using its pulse width modulation capability. Different simulations of the proposed model are performed in many nonlinear processes. Then, a comparative analysis of the outcomes under similar conditions confirms the higher accuracy of the FS, yielding a maximum relative error of 10%. The experimental outcomes show that the root mean square error is reduced by 67.68%, and the mean absolute percentage error is reduced by 52.46%. Using a fuzzy-based mosquito repellent can help maintain the speed of mosquito repellent and control the energy used by the mosquito repellent.Keywords
Mosquitoes are the most hazardous insects on the earth. Malaria infects approximately 200 million people annually and kills around 500,000 after being bitten by a female Anopheles mosquito [1]. These staggering figures are increasingly attracting worldwide attention. Using insecticides as a countermeasure, formulate anti-malarial drugs. However, the situation worsens as mosquitoes become resistant to insecticides and drugs. Other than malaria, mosquitoes carry approximately 100 different diseases, for example, yellow fever, Zika virus, and dengue. Almost 800,000 people die every year from mosquito-borne diseases, according to statistics. Hence, effectively monitoring mosquito species and distribution is essential to minimize the damage caused by these hazardous disease vectors [2,3].
Individuals are often disturbed by mosquitoes when they are working and resting, and enough attention can accurately identify the types and number of mosquitoes through hearing and vision. The eyes pick up the structural features of the mosquito, whereas the ears recognize the sound of wing flapping. In a similar approach, mosquitoes can also be captured by cameras and microphones [4].
However, recent studies have shown that most mosquito habitats located in urban areas are found close to rainwater collection wells [5] and cesspools [6] under buildings. These urban/indoor facilities keep mosquito populations up year-round, not just in summer; it often rains. Additionally, it is impossible to spray bacillus thuringiensis israelensis (Bti) larvicides on every candidate water hole or area where mosquito larvae can grow, utilizing human power only. Furthermore, global warming scenarios may introduce more favorable circumstances for the survival and mosquito life cycle completion and might affect their distribution and abundance [7].
Successful combating of mosquito disease transmission will only be possible if insecticide resistance surveillance and management programs are fully and effectively implemented globally. To this end, extensive research has focused on investigating insecticide resistance mechanisms in mosquitoes and how they develop resistance to chemical applications over time. The research also focuses on novel compounds that are safer, more effective, and more environmentally friendly to improve mosquito vector management [8]. Machine learning methods excel at prediction, classification tasks, and clustering, creating them esteemed for all characteristics of mosquito control. Joshi et al. selected more than 100 papers related to the current state of machine learning for mosquito control in urban settings. The work reviewed covered various dissimilar methods, goals, and assessment criteria from different contexts [9]. The prevalence of mosquito-borne pathogens is tough to monitor and control and is considered a quiet danger that can not be achieved. Significantly, therapeutic vaccines are developed to boost immunity to evade life-threatening conditions. Mosquitoes live with humans in society. Generally speaking, they will bring germs to people. Boonprakong et al. were interested in classifying 5 species of mosquitoes. Therefore, they applied LeNet 5. The results showed that the trained network was 96%–99% accurate for each species [10]. Fuchida et al. proposed the experimental and design validation of a vision-based automatic mosquito categorization unit that can arrange in enclosed mosquito habitats. This unit can identify mosquitoes, extract morphological features from other bugs, such as flies and bees, and then support classification based on vector machines [11]. Motta et al. implemented a convolution-based computational model neural network (CNN) that extracts features from images of mosquitoes to classify adult mosquitoes. Train CNN for automatic morphological classification of mosquitoes. The authors use a dataset that includes more than 4,000 images of mosquitoes. The results specify information crucial for the automatic morphological classification of adult mosquito species in the field. The utilization of CNNs is a significant technique for autonomous recognition. It is an invaluable and readily available resource for taxonomists and health workers to identify certain insects that can spread infectious pathogens to individuals [12].
The working principle of the electric mosquito repellent is to use electricity to heat the mosquito repellent liquid, generate steam, and distribute it into the air. The electronic mosquito repellent emanates steam when plugged into an electrical outlet. It consists of two essential parts: the repellant bottle and the heating element. When plugged in, the heating element heats the bottle, and the resulting steam generates a barrier that incapacitates the mosquitoes and effectively kills them. As the steam travels to every corner of the room, hidden mosquitoes are also quickly targeted and eradicated. The next morning, the mosquitoes will find in a dizzy or dead state. Hence, individuals’ nights are protected from the continuous threat of mosquito bites and contracting mosquito-related diseases at night. Individuals can even use the device during the day to protect themselves from mosquitoes that carry zika and dengue viruses [13,14].
BG-Counter (Biogents, Germany) is the only optical sensor product in the market for remote monitoring of mosquito populations. As described by Biogents, it can differentiate and count mosquitoes from different insects. Nevertheless, the sensor may not specify information regarding the mosquito sex, species, genus, or other attributes [15].
Recommend installing automated mosquito detection and larvicide spraying systems at candidate sites rather than monitoring each water-associated facility in any urban area for mosquito habitat. To automate this procedure, the sensors were used to detect input parameters. The speed and active time of the mosquito repellent are then resolute from available data. Unfortunately, there is no simple approach to establishing an exact mathematical relationship between inputs and output. Therefore, this problem has not been solved until recently. Traditionally, people just turn on the mosquito repellent at a continuous speed, and there is no mechanism for the mosquito repellent to be active for a time. Due to the unclear input/output correlation, the design of mosquito repellent in the past is not suitable for conventional control design methods. The authors use fuzzy logic (FL) to solve this design problem. FL plays an important role in various branches of science, especially in the field of technology. FL is a non-classical logic that not only exhibits uncertainty but also measures and deals with it in ways that probabilistic logic cannot consider. Fuzzy sets do not have defined, clear, and sharp boundaries but have continuous values between the range [0, 1] for better knowledge representation. FL simulates the human ability to think in incomplete, imprecise, and vague situations. FL is used because the mosquito repellent based on fuzzy logic adjusts the accurate speed and active time even without a precise model of the input/output correlation [16–20]. Various algorithms have been reported for model design in the literature. These algorithms include the ant colony algorithm, genetic algorithm, artificial neural networks, and particle swarm optimization. However, all these algorithms are relatively time-consuming because convergence requires complex calculations. These algorithms require extensive network training in advance or need to update many particles, which is why the time consumption increases. Therefore, practically implementing these algorithms using commercial microcontrollers is not feasible [21].
Computational intelligence (CI) is a branch of computer science relevant to all engineering, technology, and science fields. FSs are an important example of CI. Modern-day techniques in automatic control and processing make use of fuzzy sets. FL based microcontrollers lead the way in the contemporary design of home appliances. Nowadays, various appliance manufacturers and autonomous systems are using FL based microcontrollers to innovate and save energy in their product designs. The FL based microcontroller is responsible for making logical decisions. In numerous home appliances (microwave ovens, washing machines, air conditioners, rice cookers, etc.), FL based microcontrollers have proven their performance to operate intelligently in any situation. The basic advantage of FL based microcontrollers is their capability to efficiently handle nonlinear systems [22].
This research targets the idea of utilizing FL control to regulate the speed and active time of the mosquito repellent. The research describes techniques that can be used to achieve accurate speed and active time of the mosquito repellent. The method is exclusively based on taking imprecise inputs from two sensors, fuzzing them, and obtaining a crisp output value for the speed and active time of the mosquito repellent. It is clear from the research itself that this technique could be used in practice to automate mosquito repellent more precisely. The key motivation of this research is to improve the performance of the mosquito repellent with the help of FL, transforming the mosquito repellent into an intelligent, cost-effective, and energy-saving device to provide a safe and comfortable operating/living space.
In Section 2, the basic design of the FS is described. The algorithm design of the FL-based mosquito repellent control system is defined in Section 3. Section 4 explained the experimental setup in detail. The simulation outcomes of the model are expressed in Section 5. A detailed analysis of the experimental and simulation setups is explained in Section 6. Section 7 explains the comparative analysis. Conclusions and future work are described in Section 8.
The transistor-transistor logic (TTL) compatible output voltage levels (i.e., 0–5 V) are available in modern sensors these days, so it can be assumed that these types of sensors are used in the proposed model. The system output in the form of a pulse width modulated (PWM) signal was chosen for its lower power loss and higher efficiency. Isosceles triangles describe the membership functions (MFs) of these fuzzy sets. All membership function has two parameters.
The proposed mosquito repellent is designed to accept two input variables, the repellent cartridge, and several mosquitoes, and provide the speed and active time of the mosquito repellent as an output control variable. The block diagram of the proposed FS is shown in Fig. 1. The FS uses two sensors for two input variables. Each sensor produces a signal proportionate to the value of its corresponding sensing parameter. The generated signal is fed to two fuzzifiers, each producing two linguistic variables after forced signal conditioning. These linguistic variables are then passed to the inference engine. The rule blocks, including pre-defined rules, are also allied with the inference engine. Based on predefined rules and four different fuzzy inputs, the inference engine provides eight outputs to the defuzzifier using a min-AND process. Finally, the defuzzifier provides a clean output value (speed of the mosquito repellent).
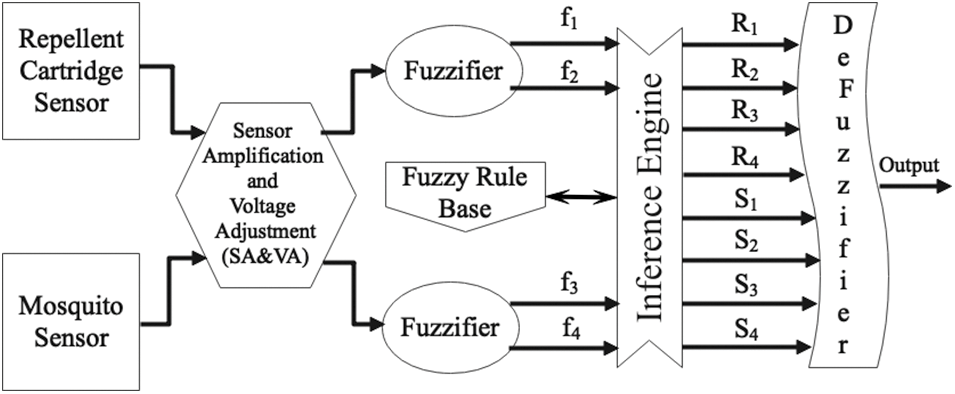
Figure 1: FL-based mosquito repellent’s block diagram
The FL-based mosquito repellent was planned for the following input parameter ranges: repellent cartridge = 0–50, number of mosquitoes = 0–5. It is assumed that the sensor output voltage levels over the complete range of input parameters are compatible with TTL devices (0–5 V). The SA&VA unit converts the signal from the sensor into a range for each input parameter accounted for in the proposed FS, as shown in Fig. 1.
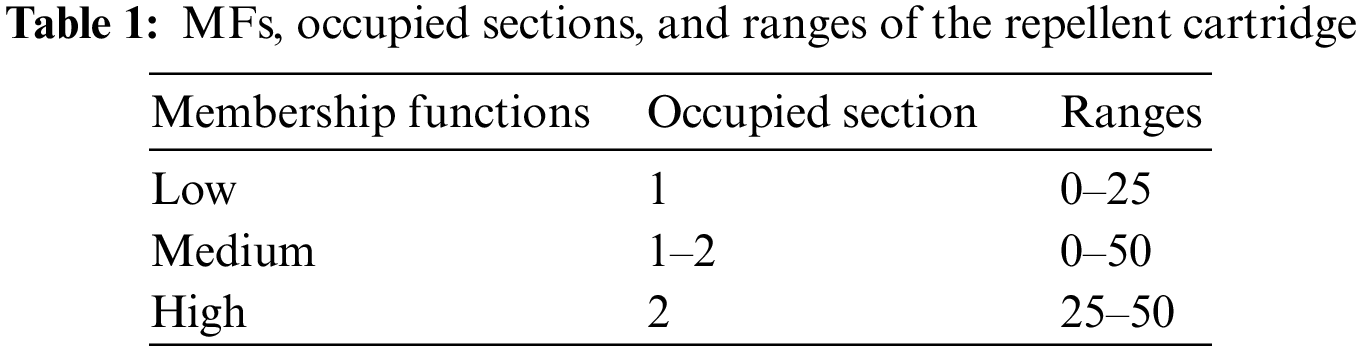
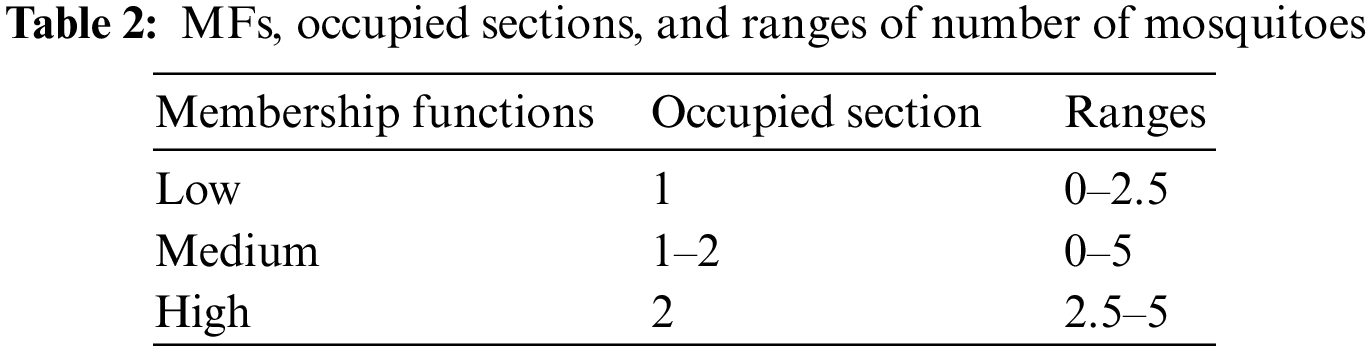
The fuzzy inputs are transformed into linguistic values by a fuzzifier, and the output is provided as linguistic variables of fuzzy sets. For the full range of each input variable, three triangular shaped MFs are defined in the design with two sections. The names of the MFs and their allied sections and ranges are mentioned in Tables 1 and 2.
Figs. 2 and 3 show graphical views of the three MF distributions, with two sections for each input variable.
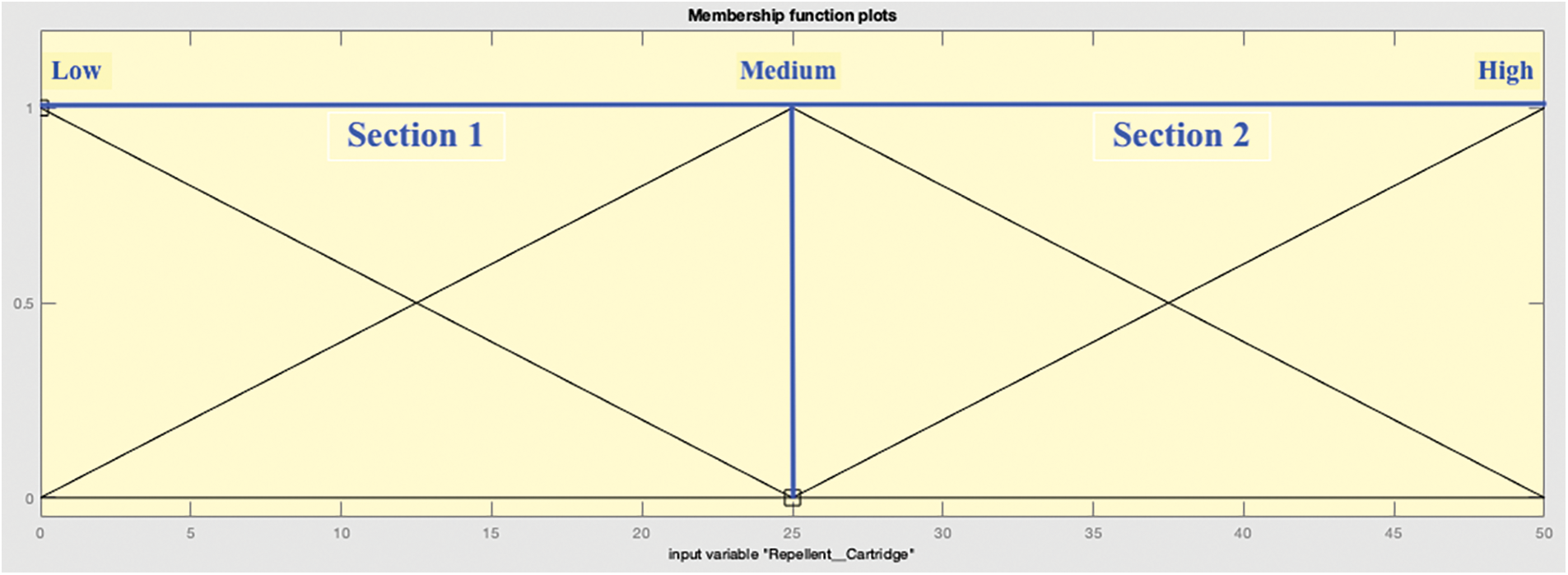
Figure 2: MFs for “Repellent cartridges”
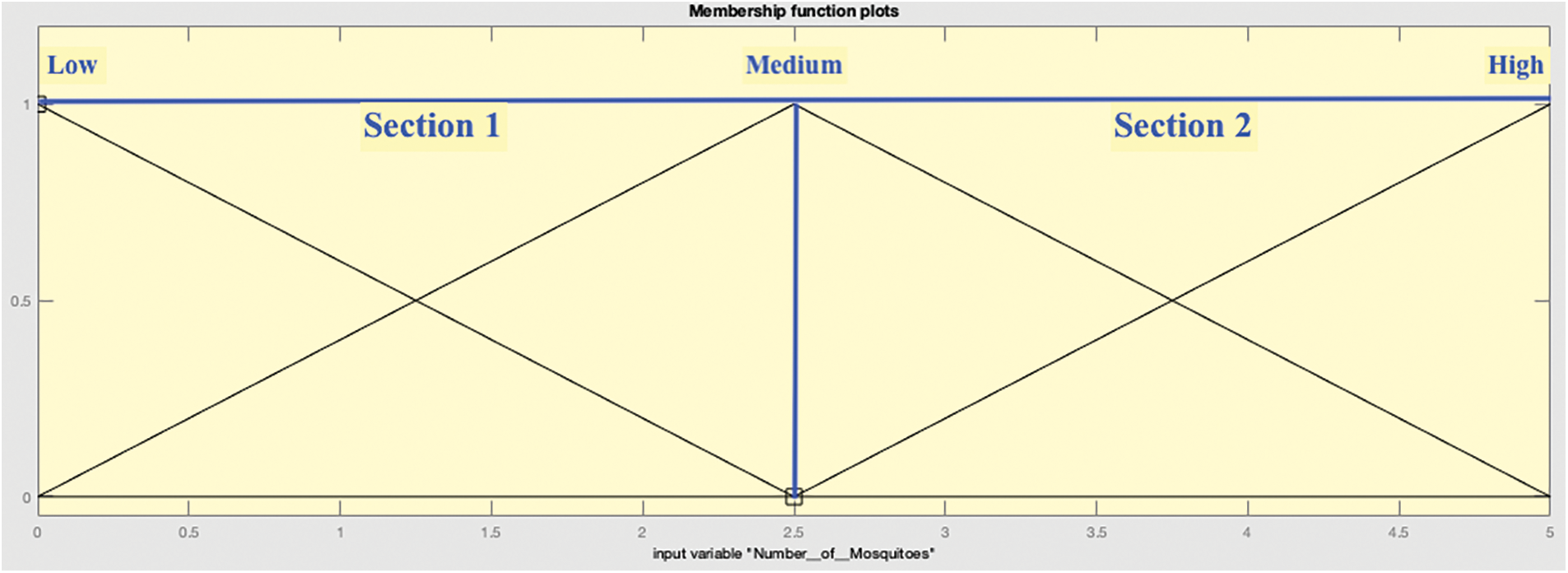
Figure 3: MFs for “Number of mosquitoes”
As shown in Fig. 1, a fuzzifier is required for each input variable. Since a similar fuzzification topology is used for each input variable, Fig. 4 shows the internal architecture of each input fuzzifier. Multiplier: Interprets fuzzy input range of 0–5 volts as clear value 0–50 times 25 for repellent cartridge input, clear value 0–5 times 2.5 for a number of mosquitoes input, Generator; arranges interpretation placed by fuzzy variable input value sections, Subtractor; arrange modification to determine crisp value from decisive values of each section, Multiplexer; possibility to use section address information and two different subtractors to pass input, multiplex the two values, as this proposed FS is shown for two pre-defined sections, a divider, prescribed to divide the adapted value in each selected section by 25 or 2.5 to determine the relevant values of repellent cartridge and a number of mosquitoes input for that section, and another fuzzy set subtractor, by subtracting from 1. The first clear value of the defuzzifier set is used to decide the active value of subsequent fuzzy sets [23].
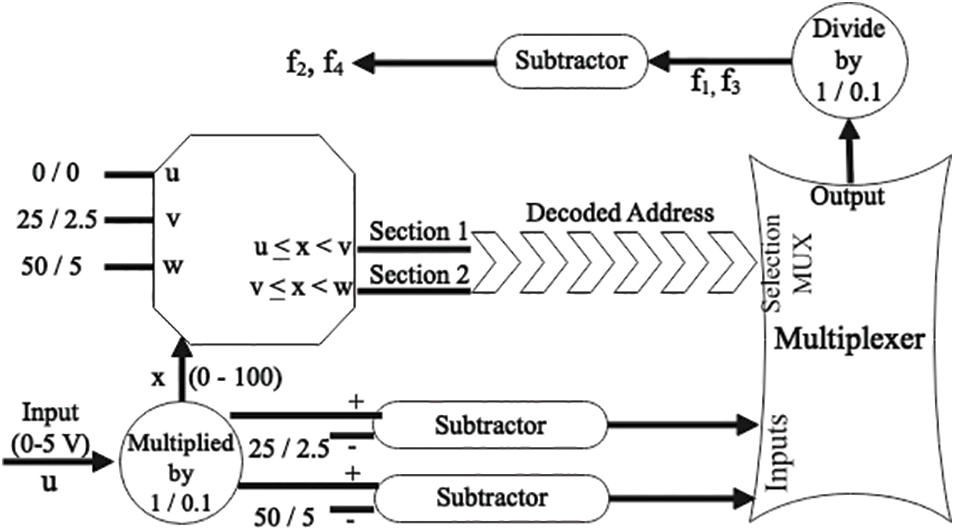
Figure 4: Internal structure of both fuzzifiers
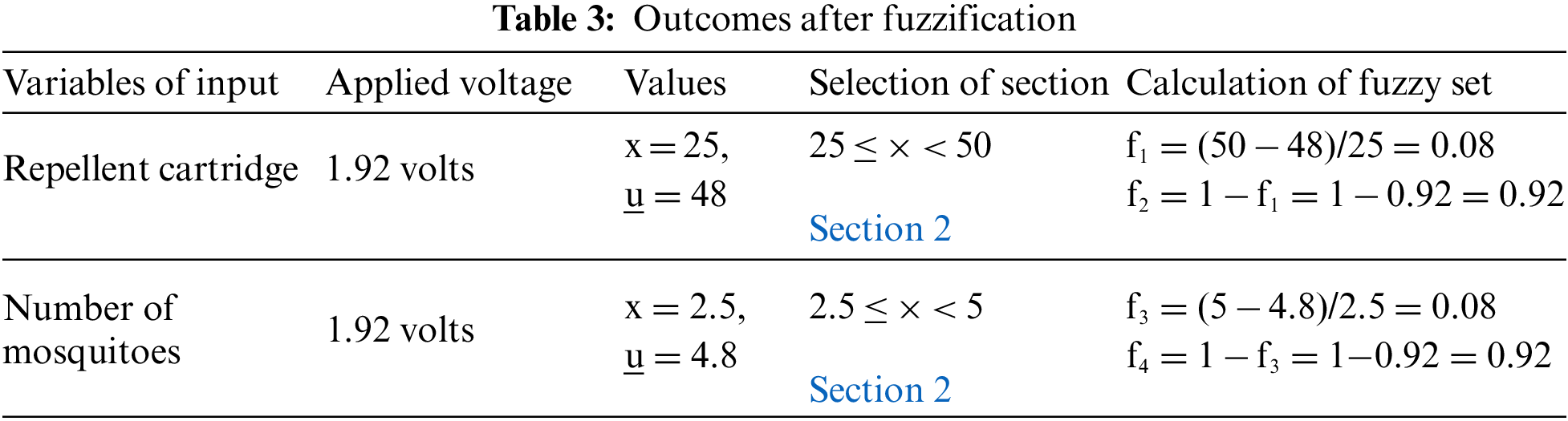
Let us now consider an example utilizing input values 48 and 4.8 for the repellent cartridge and the number of mosquitoes. After passing through the fuzzifier, the subsequent linguistic value is obtained as shown in Table 3.
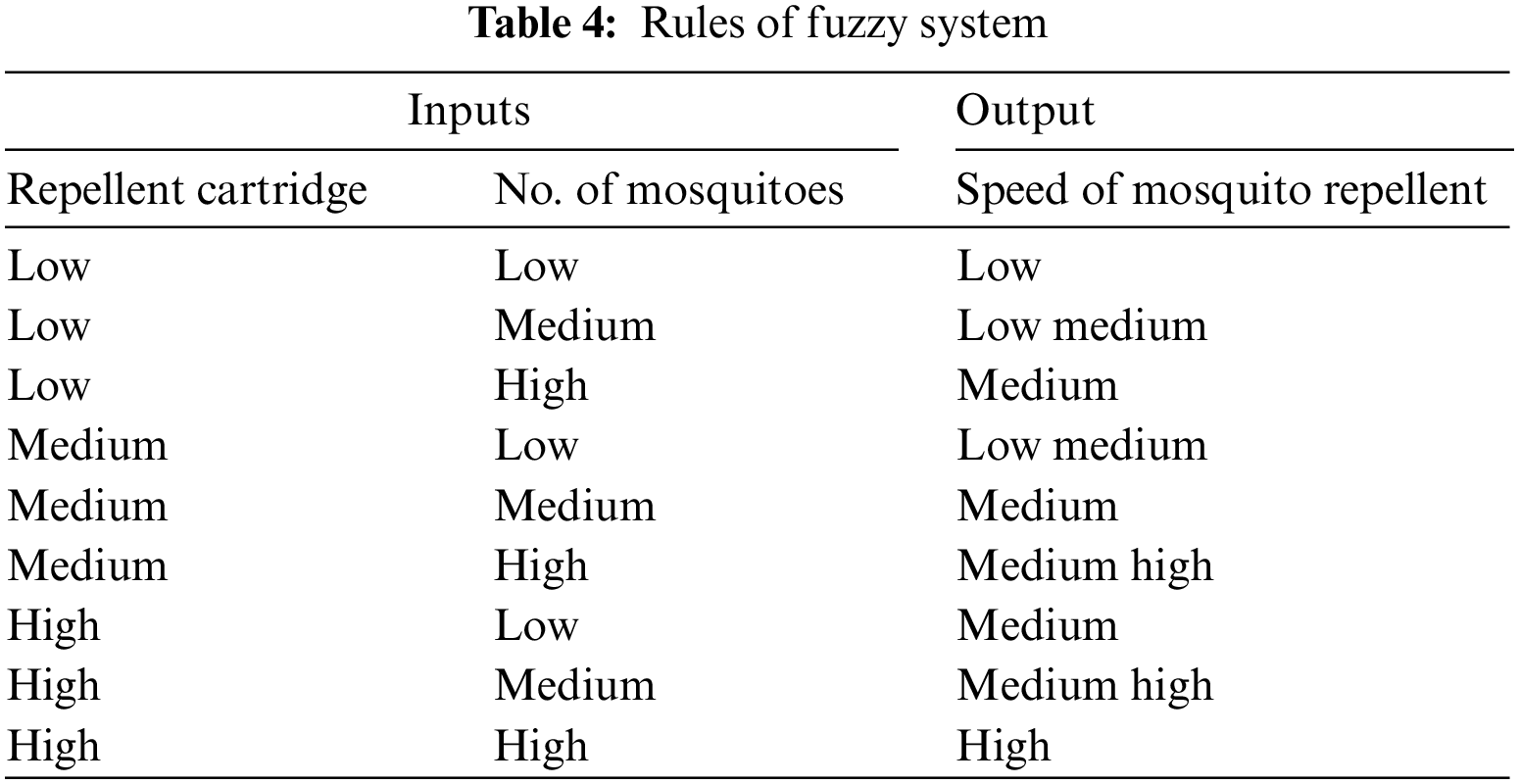
In this model, the IE consists of four Min-AND operators. These Min-AND operators cannot function similarly to typical AND operators, but they choose the smallest value of the inputs for precise output. The fuzzifier provides four inputs to the IE and enforces a min-max configuration to achieve “R” output. The fuzzy rules necessary for all ranges of the model are resolute by mn, where m = max. no. of fuzzy sets and n = no. of inputs. Hence, a maximum of nine fuzzy rules are possible, as shown in Table 4.
In this scenario, the precise values of the two input variables must follow the rule of four because the values of the two input variables in one section are allied with two parameters.
The result of the IE is:
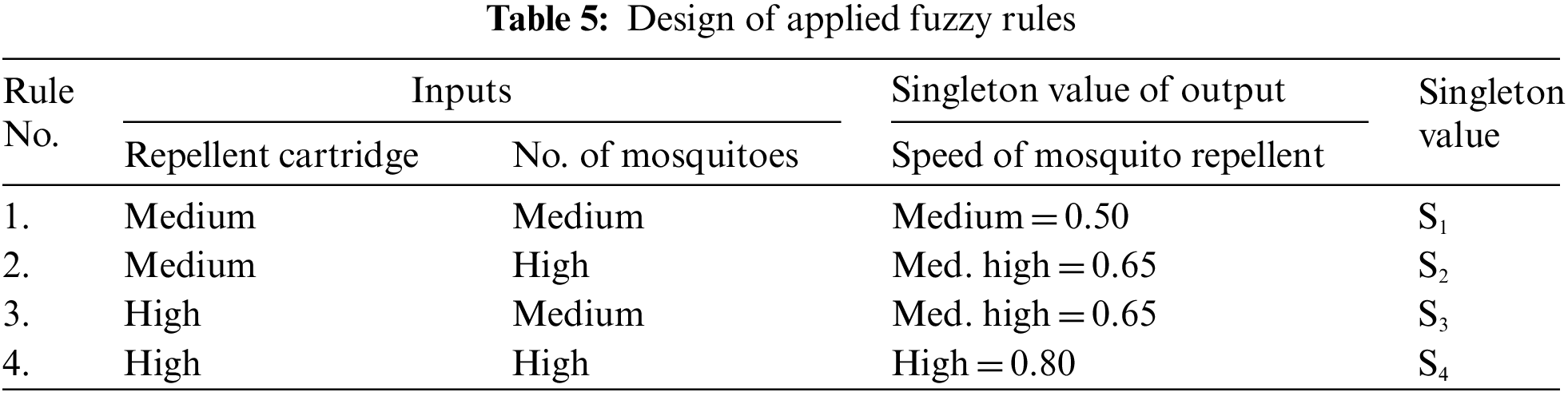
Rule block gets two explicit values of the repellent cartridge and the number of mosquitoes. A numerical procedure generates singleton values according to defined algorithmic rules. Four rules must be used for two variables to achieve matching values for S1, S2, S3, and S4. A rule block receives two crisp input values, partitions the discourse into sections that produce two FL variables per section, triggers fuzzy rules and generates crisp outputs [24]. Four rules are mandatory for both input variables to obtain corresponding singleton values. Table 5 shows every variable according to these rules.
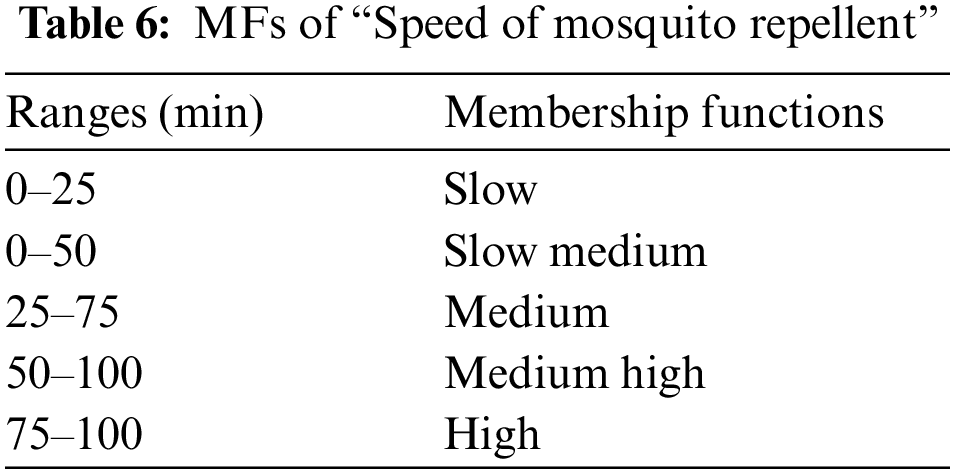
The defuzzifier sets the speed in (%) as output in this proposed FL-based mosquito repellent. The MF of the speed of mosquito repellent is shown in Fig. 5, and Table 6 explains the output MF.
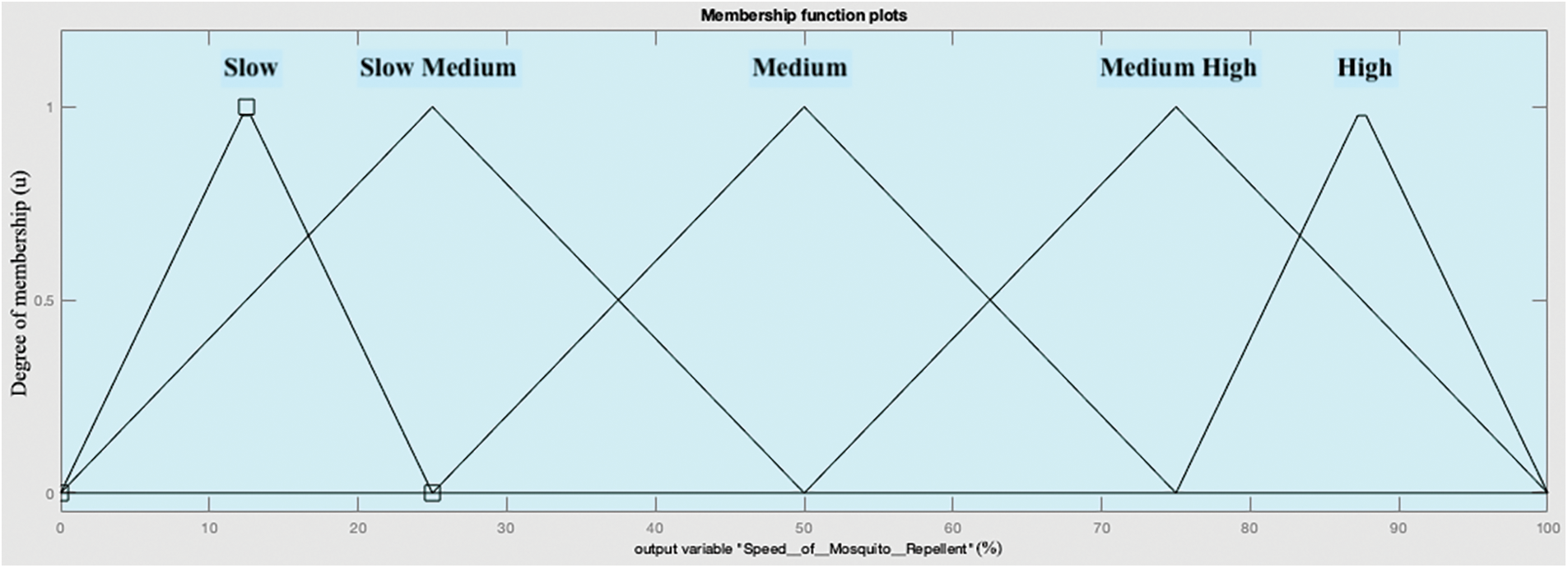
Figure 5: MFs for the speed of mosquito repellent
After assessing its input, the defuzzification method delivers a clear output (speed of mosquito repellent). In this model, the defuzzifier requires eight (8) inputs. The IE generates four values (R1, R2, R3, R4), and the rule block produces four values (S1, S2, S3, S4). The center of the averaging process estimates the output value using the mathematical expression (∑Si * Ri∑Ri), where i = 1 to 4. The defuzzifier includes four multipliers for Si * Ri. The defuzzifier design consists of two adders, one for ∑Si * Ri and another for ∑Ri, and a divider for ∑Si * Ri∑Ri. Finally, the defuzzifier provides expected output values [25].
For the performance evaluation of the proposed FS, The mean absolute percentage error (MAPE) and the root mean square error (RMSE) are expressed in Eqs. (1) and (2):
where ‘X’ is the simulated value, ‘Y’ is the measured value, and ‘Z’ indicates the no. of observations.
4 Implementation of the Fuzzy Model
A low-cost microcontroller (ATmega 328P) has been utilized to implement the proposed FS. The microcontroller’s analog pins are designed to accept analog voltages (0–5 volts) applied straight to the analog input pins. An analog-to-digital converter converts an input analog signal into a digital signal for further manipulation. The microcontroller runs at 16 MHz and generates PWM on the output pin. To emulate the full range of signal voltages that every TTL-compatible input sensor can produce, a circuit for a voltage divider can be utilized to deliver variable voltages on the analog pins. The FS’s output is connected to the PWM module through encoding, and the duty cycle of the output pulse changes with the FS’s output. To determine the actual variation of the output pulse, a digital oscilloscope (MCP model: CQ620A), which works at 100 MHz, has been utilized [26]. The experimental setup is shown in Fig. 6.
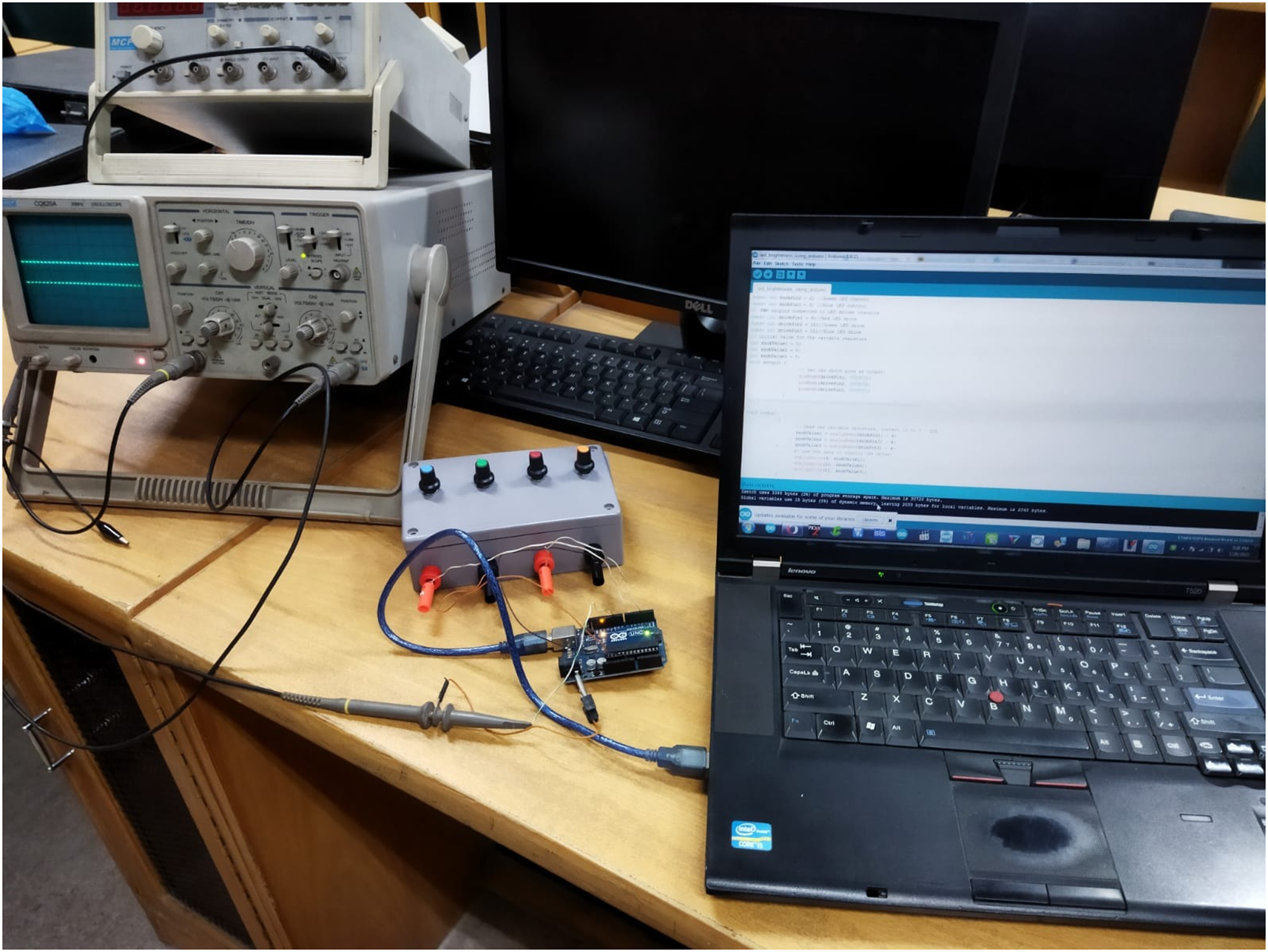
Figure 6: Setup of the experiment
The defined rules of the fuzzy system must be transferred to an array of numbers for accumulation in memory. The most straightforward technique is to translate fuzzy sets for indexing numbers. Consequently, each rule needs Y numbers in the sction of arguments and a single output in the resulting section. Presume that the number of indexes accumulates in two bytes. The fuzzy system is implemented in the ATmega 328P equipment, carried out at a speed of 16 MHz, the execution of instruction takes 10 clocks roughly; after that, an inference takes almost 45 ms. One inference takes approximately one millisecond, which is about 100 flops. Therefore, the conclusion using the table of the rules is 45 times quicker than online inference.
To calculate the output of the system, use the rule viewer editor to display the rules graphically. In principle, this is the comprehensive route of the fuzzy output method. The rule viewer confirms that the algorithm tests the rule by observing the crisp value, assigns the input value to two input variables (repellent cartridge = 48, number of mosquitoes = 4.8), and utilizes ΣSi * Ri/ΣRi to generate a crisp output (speed of mosquito repellent = 78.6) as shown in Fig. 7.
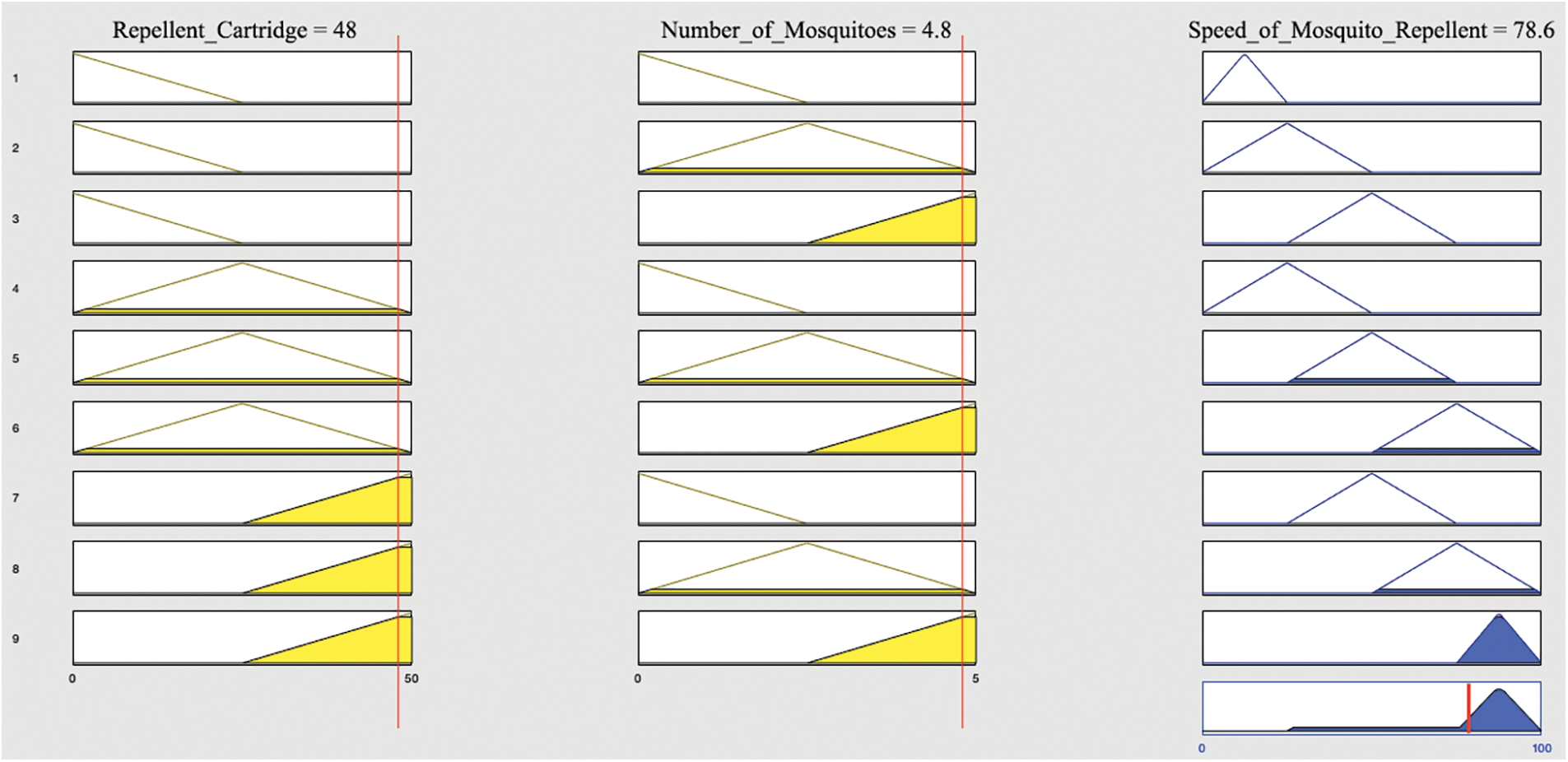
Figure 7: Rule viewer of the speed of mosquito repellent
Fig. 8 shows that when the repellent cartridge and the number of mosquitoes increase linearly, the speed of mosquito repellent increases simultaneously. In contrast, when the repellent cartridge and the number of mosquitoes decrease, the speed of mosquito repellent decreases linearly. The 3D graph is a non-linear overall graph showing the speed of mosquito repellent for a given input.
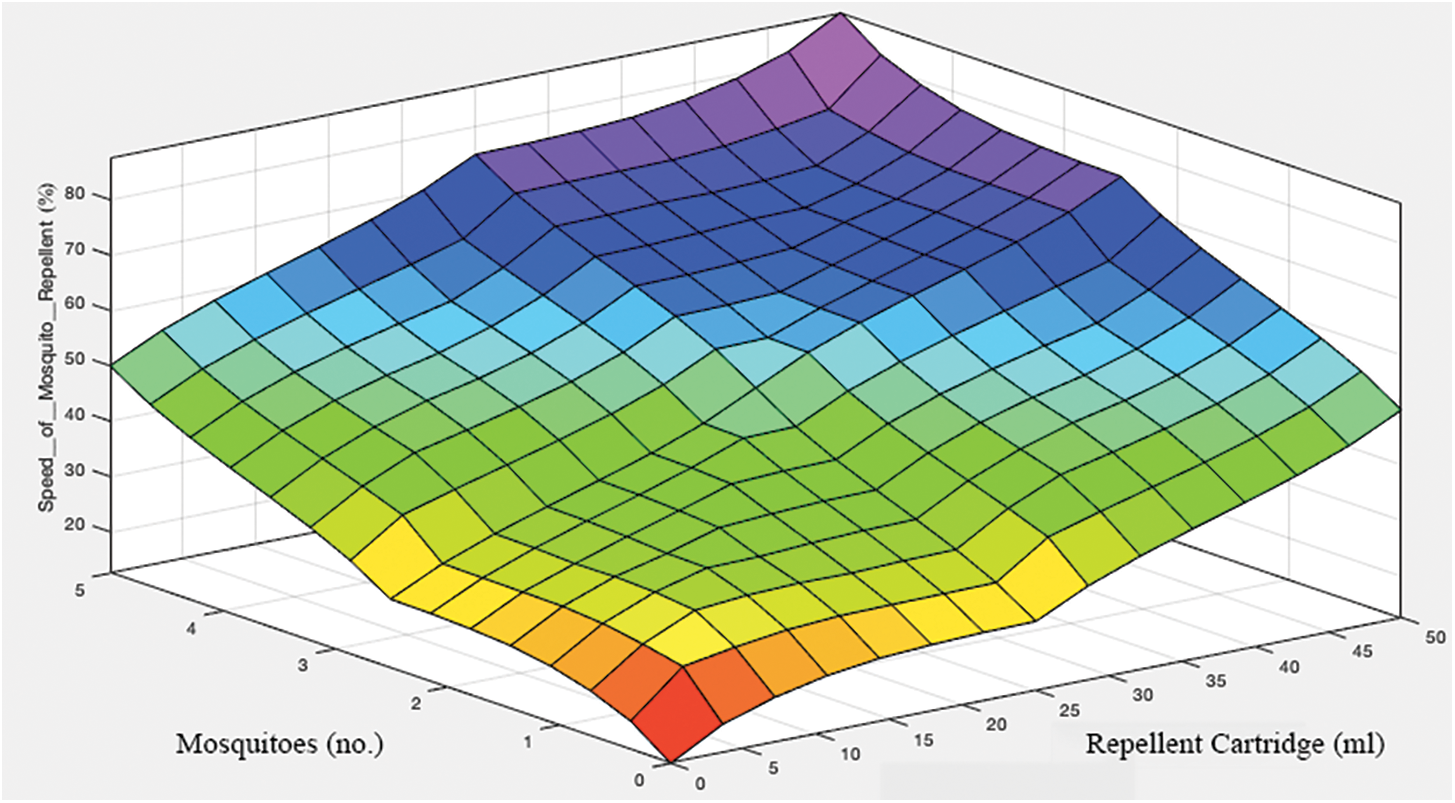
Figure 8: Graph between repellent cartridge, no. of mosquitoes, and speed of mosquito repellent
The system was developed using MATLAB Simulink R2016b, and MATLAB simulation was performed to authenticate the efficiency of the designed MFs. As shown in Fig. 9, the conventional (3 input and output MFs) and the proposed (3 input and 5 output MFs) FL systems of linear systems are simulated, maintaining three input MFs and different output MFs. To find the best solution to reduce errors and enhance the accuracy of the FS, many cases were simulated utilizing the same input values for both sensors over the entire range. In the literature, the FL controller model is usually based on the same number of input and output MFs [21,23–26]. In Fig. 9, the experimental results show that the traditional FL controller design is prone to large relative errors even when applied to linear systems. It is clear that, in various scenarios, relative error values higher than 10% are produced, which ultimately lead to greater RMSE and MAPE values for these FL controller models, as described in Table 7.
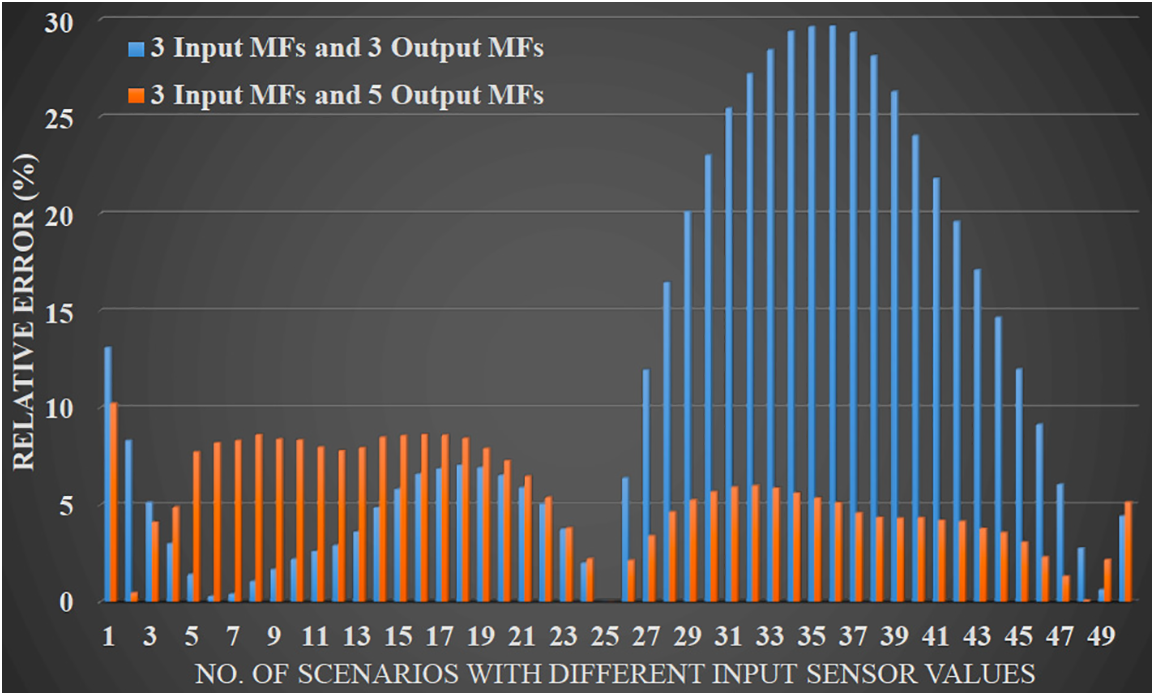
Figure 9: The relative error’s comparison of two models

It can be seen that the relative error in the scenario of 3-input MF and 5-output MF is still well below 10% over the entire input range. This is the opposite of the scenario of the same number of input/output MFs, wherever nearly each MFs essential to be tuned for superior accuracy. The proposed model delivers precise outcomes resolute in terms of maximum relative error (%), RMSE, and MAPE.
The validity of the proposed model for designing an accurate FL controller with nonlinear output is also determined. The error comparison view in Table 8 clearly shows that the proposed model also exhibits superior efficiency in the case of non-linear output values. Even in this case, Fig. 10 indicates that the relative error for the 3-input MF and 5-output MF cases is still well below 10% over the complete range of the input.

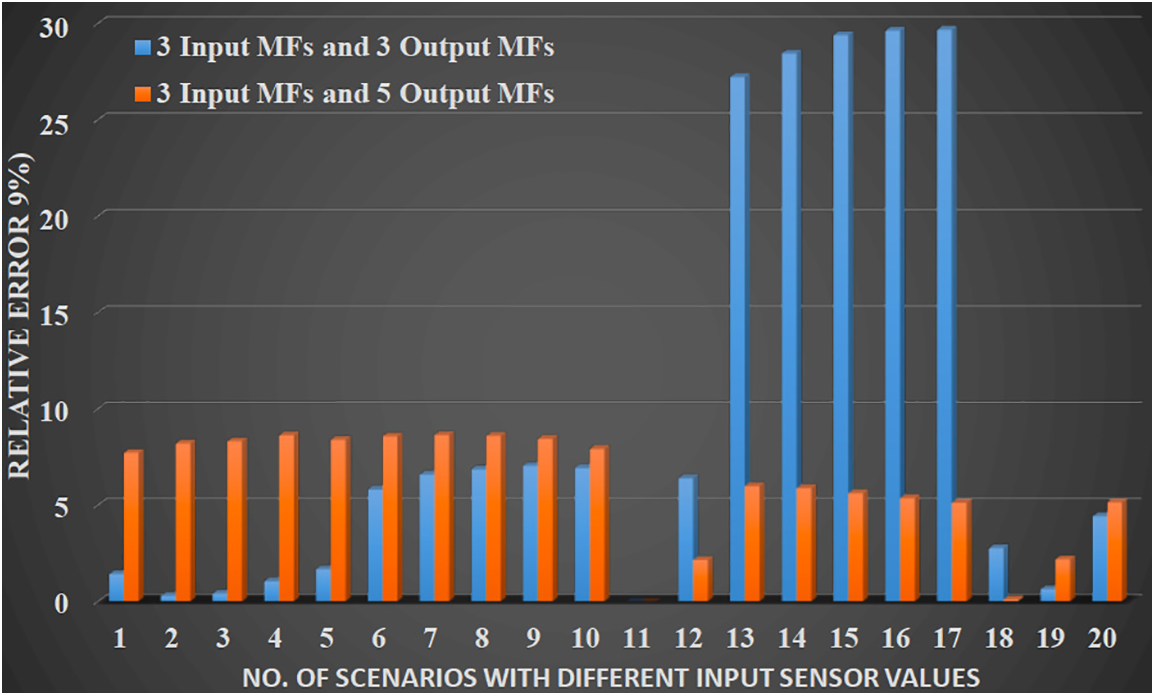
Figure 10: The relative error’s comparison of nonlinear models
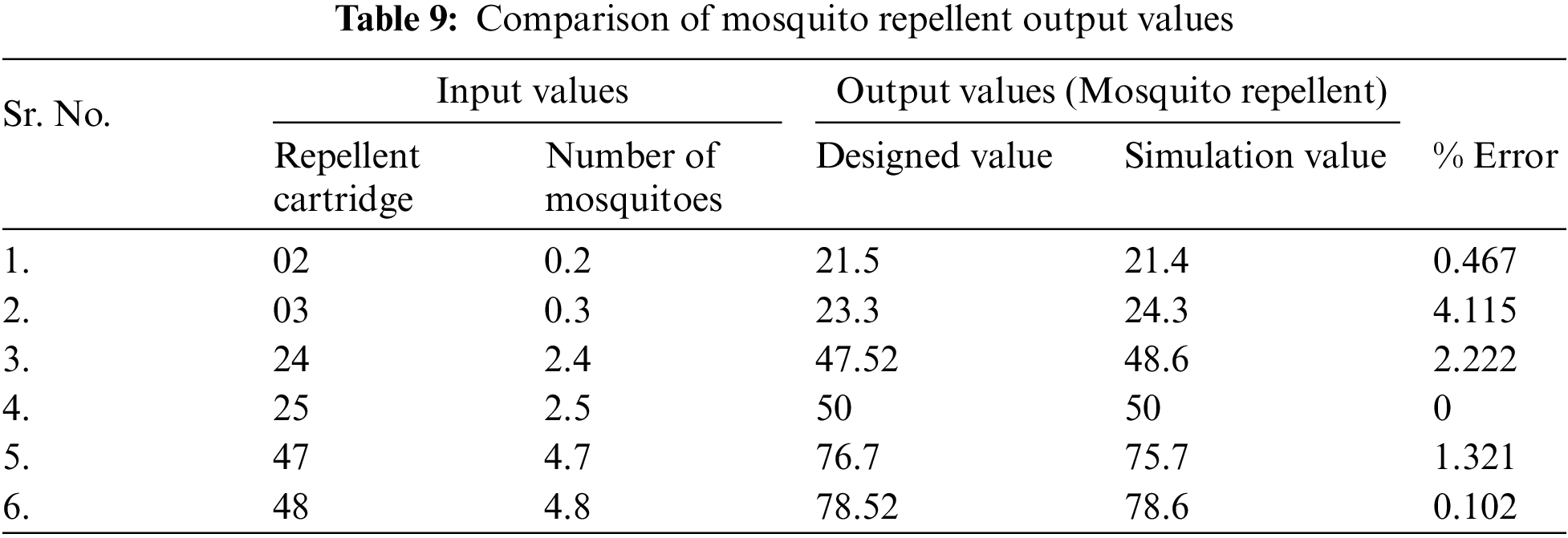
The outcomes of the design algorithm are coherent with the simulation outcomes. Due to certain errors in the MATLAB software, the display is roughly the same, as described in Table 9. The results show that the fuzzy-based mosquito repellent proves to be valuable with less error.
The Mamdani model is the most effective method utilized in fuzzy logic, which has several applications in various fields of modern days. However, the Mamdani model used in fuzzy systems has some substantial issues to address. The key issue is the choice of the particular shape and boundaries of membership functions in the universe of discourse. The Mamdani model had been used for simplicity, so the weight is “1” in all models, and the authors did not collect the data anywhere. Still, the authors designed, tested, and simulated various models and then finalized the results.
The proposed method determines high-performance fuzzy membership functions to reduce relative error and increase the system’s accuracy. The new approach uses the actual figure of encoding parameters of the membership functions’ base length and peak position. It combines the assessment of the effectiveness of the fuzzy system to present the corresponding membership functions assessment mechanism to achieve accurate results. A comparison has been mentioned to illustrate the considerably increased system’s performance, optimized by the proposed technique. The exact definition of membership functions needs not only a decrease in relative error but also an improvement in the system’s accuracy and stability. Various simulations were performed utilizing the proposed technique in identical scenarios. The outcomes show that the proposed technique reduces the RMSE by 67.68% and MAPE by 52.46%.
Moreover, the proposed FS achieves better accuracy and stability than any FS in the literature. Based on fuzzy reasoning, an approximate reasoning model is an efficient tool for designing artificial intelligence models. FSs are frequently used to make decisions and predict multiple scenarios in ambiguity. The efficiency of the proposed FL based mosquito repellent in terms of prediction accuracy is assessed utilizing the loss function parameter MAPE; the achieved outcomes are compared with the FS outcomes to verify its prediction accuracy.
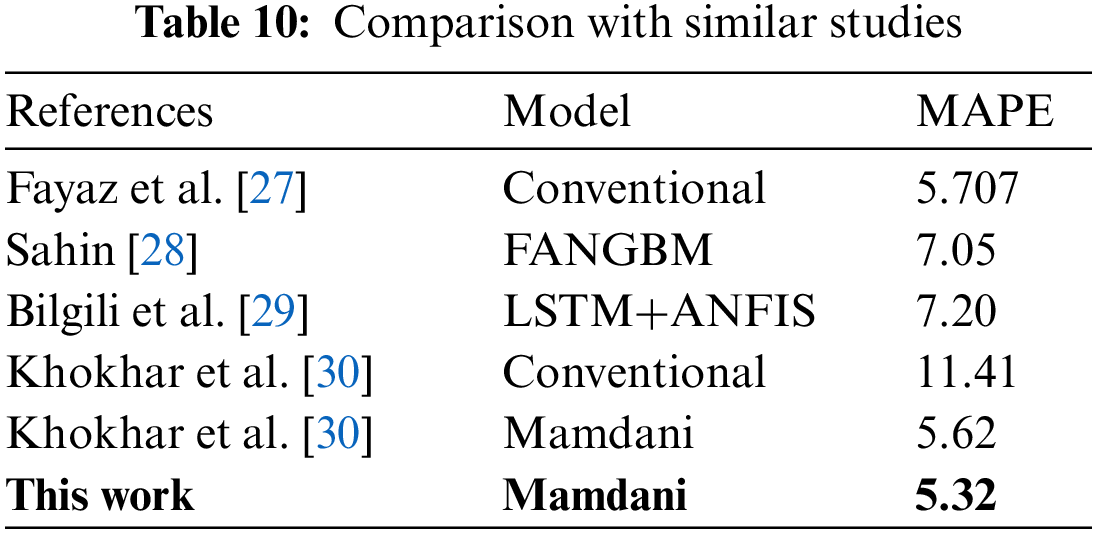
Fayaz et al. [27] introduced a Learning Control (LtC) approach to address the problem of choosing precise shapes and MF boundaries. The proposed method consists of two main parts, the learning algorithm (LA) unit and the control algorithm (CA) unit. The Mamdani model is used in the CA unit, while the LA unit uses the artificial neural network (ANN) algorithm. Sahin [28] investigated the forecasts for Turkey’s total installed capacity and electricity generation of renewable energy and hydropower from 2019 to 2030. For this purpose, the fractional nonlinear gray Bernoulli model (FANGBM) and its simplified form are utilized and compared. The forecasting technique was applied to the dataset from 2009 to 2018, and the forecasting performance of different models was measured by calculating the MAPE value. Bilgili et al. [29] applied two diverse data driven techniques, for example, long short-term memory (LSTM) neural network and adaptive neuro fuzzy inference system (ANFIS) with fuzzy c-means (FCM), to execute short term forecasting one day ahead. Furthermore, short-term hydroelectric (HEG), bioenergy (BEG), and geothermal (GEG) electricity generation forecasts are also performed utilizing these techniques. The MAPE was used as an evaluation criterion. Khokhar et al. [30] proposed a fuzzy logic controller that implements an augmented output MF compared to the input MF to enhance the FS’s accuracy, performance, and robustness. The work introduced the best possible combination of input/output MFs to distribute uniform input MFs and augmented output MFs. Table 10 compares the fuzzy-based mosquito repellent control system with results from recent articles in the literature. Moreover, Table 10 presents the experimental outcomes based on the MAPE criterion, proving that the proposed model is the best.
Therefore, fuzzy-based mosquito repellent best meets the goals of residential comfort. It permits users to minimize energy usage and save repellent cartridges maintaining residential comfort. Precisely, with the proposed system, the required control accuracy (≤ ±1.5%) is obtained in this scope, thus confirming the efficiency of the proposed system. Hence, the proposed system can be utilized as a design tool for fuzzy systems in any industry.
The design model of the FL based mosquito repellent control system is effectively obtained through the experimental and simulation results of various parts of the FL based mosquito repellent control system. Algorithmic design techniques create a very efficient, fully controlled, intelligent fuzzy-based model. The proposed FS forms the ability of a processing plant to regulate a fuzzy-based mosquito repellent control system without keeping the complexity of the enforcing environment. The new method uses the peak position and base length of the MF. It combines the evaluation of the validity of the FS to propose a corresponding MF evaluation mechanism to obtain perfect results.
In the future, the proposed FS will assist advanced fuzzy control systems and various industrial layouts in designing autonomous control systems and environmental monitoring systems utilizing modern FPGA-based nano chips. We further plan to implement our proposed model on multiple output fuzzy systems. We also want to apply more input and output membership functions to enhance the accuracy and stability of the system.
Acknowledgement: This research was conducted in the laboratories of the Department of Computer Science and the Department of Physics (Electronics), GC University, Lahore, Pakistan. We thank all personnel for their cooperation and participation in facilitating our experiments, especially Dr. M. Saleem Khan and Dr. Ali Asif. We are thankful to all the reviewers for their valuable comments; because of those comments, we can improve the quality of this article.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Aaqib Inam, Zhu Li, Salah-ud-din Khokhar; data collection: Aaqib Inam, Zubia Zafar, Salah-ud-din Khokhar, Muhammad Imran; analysis and interpretation of results: Aaqib Inam, Zhu Li, Zubia Zafar, Salah-ud-din Khokhar, Muhammad Imran; draft manuscript preparation: Aaqib Inam, Zhu Li, Zubia Zafar, Salah-ud-din Khokhar, Muhammad Imran. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. J. G. Beeson, L. Kurtovic, C. Dobao, D. H. Opi, J. A. Chan et al., “Challenges and strategies for developing efficacious and long-lasting malaria vaccines,” Science Translational Medicine, vol. 11, no. 474, pp. 1–17, 2019. [Google Scholar]
2. S. Bhatt, P. W. Gething, O. J. Brady, J. P. Messina, A. W. Farlow et al., “The global distribution and burden of dengue,” Nature, vol. 496, no. 7446, pp. 504–507, 2013. [Google Scholar] [PubMed]
3. M. A. Johansson, P. F. Vasconcelos and J. E. Staples, “The whole iceberg: Estimating the incidence of yellow fever virus infection from the number of severe cases,” Transactions of the Royal Society of Tropical Medicine and Hygiene, vol. 108, no. 8, pp. 482–487, 2014. [Google Scholar] [PubMed]
4. J. Wang, S. Zhu, Y. Lin, S. Svanberg and G. Zhao, “Mosquito counting system based on optical sensing,” Applied Physics B, vol. 126, no. 2, pp. 1–10, 2020. [Google Scholar]
5. Y. K. Kim, J. B. Lee, E. J. Kim, A. H. Chung, Y. H. Oh et al., “Mosquito prevalence and spatial and ecological characteristics of larval occurrence in Eunpyeong Newtown, Seoul Korea,” Korean Journal of Nature Conservation, vol. 9, pp. 59–68, 2015. [Google Scholar]
6. R. Burke, R. Barrera, M. Lewis, T. Kluchinsky and D. Claborn, “Septic tanks as larval habitats for the mosquitoes Aedes aegypti and Culex quinquefasciatus in Playa-Playita, Puerto Rico,” Medical and Veterinary Entomology, vol. 24, pp. 117–123, 2010. [Google Scholar] [PubMed]
7. K. Kim, J. Hyun, H. Kim, H. Lim and H. Myung, “A deep learning-based automatic mosquito sensing and control system for urban mosquito habitats,” Sensors, vol. 19, no. 12, pp. 2785, 2019. [Google Scholar] [PubMed]
8. Ş. Demirak, Ş. Meryem and E. Canpolat, “Plant-based bioinsecticides for mosquito control: Impact on insecticide resistance and disease transmission,” Insects, vol. 13, no. 2, pp. 162, 2022. [Google Scholar]
9. A. Joshi and C. Miller, “Review of machine learning techniques for mosquito control in urban environments,” Ecological Informatics, vol. 61, pp. 101241, 2021. [Google Scholar]
10. P. Boonprakong, K. Chamnongthai, W. Patchoo and P. Mongkalangoon, “Deep learning to mosquitoes species pattern recognition,” in 2021 25th Int. Computer Science and Engineering Conf. (ICSEC), Chiang Rai, Thailand, pp. 464–468, 2021. [Google Scholar]
11. M. Fuchida, T. Pathmakumar, R. E. Mohan, N. Tan and A. Nakamura, “Vision-based perception and classification of mosquitoes using support vector machine,” Applied Sciences, vol. 7, no. 1, pp. 51, 2017. [Google Scholar]
12. D. Motta, A. A. B. Santos, I. Winkler, B. A. S. Machado and D. A. D. I. Pereira, “Application of convolutional neural networks for classification of adult mosquitoes in the field,” PLoS One, vol. 14,no. 1, pp. e0210829, 2019. [Google Scholar] [PubMed]
13. W. J. Laursen, G. Budelli, E. C. Chang, R. Gerber, R. Tang et al., “Heat and humidity sensors that alert mosquitoes to nearby human hosts,” Neuroscience, 2022. https://doi.org/10.1101/2022.04.05.487046 [Google Scholar] [CrossRef]
14. Y. F. A. Bouoto, “MOSQUITOBELL2: A mosquito detection system through the timbre attribute of the wing-beat frequency using an acoustic sensor,” in 2020 35th Int. Technical Conf. on Circuits/Systems, Computers and Communications (ITC-CSCC), Nagoya, Japan, pp. 187–192, 2020. [Google Scholar]
15. M. I. González-Pérez, B. Faulhaber, M. Williams, J. Brosa and C. Aranda, “A novel optical sensor system for the automatic classification of mosquitoes by genus and sex with high levels of accuracy,” Parasites & Vectors, vol. 15, no. 1, pp. 1–11, 2022. [Google Scholar]
16. A. Enayati, J. Hemingway and P. Garner, “Electronic mosquito repellents for preventing mosquito bites and malaria infection,” Cochrane Database of Systematic Reviews, 2007. https://doi.org/10.1002/14651858.CD005434.pub2 [Google Scholar] [CrossRef]
17. I. Choi and H. Kim, “Reducing energy consumption and health hazards of electric liquid mosquito repellents through TinyML,” Sensors, vol. 22, no. 17, pp. 6421, 2022. [Google Scholar] [PubMed]
18. S. U. D. Khokhar, Q. Peng and M. Y. Noor, “2 in 1 humidifier + air purifier fuzzy control system,” Journal of Uncertain Systems, 2022. https://doi.org/10.1142/S1752890922500155 [Google Scholar] [CrossRef]
19. S. U. D. Khokhar, Q. Peng, R. Touqir and M. S. Khan, “Medical condition monitoring system using fuzzy logic,” in 2020 IEEE Int. Conf. on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, pp. 211–216, 2020. [Google Scholar]
20. R. F. Mansour, H. Alhumyani, S. A. Khalek, R. A. Saeed and D. Gupta, “Design of cultural emperor penguin optimizer for energy-efficient resource scheduling in green cloud computing environment,” Cluster Computing, vol. 26, no. 1, pp. 575–586, 2023. [Google Scholar] [PubMed]
21. S. Farajdadian and S. H. Hosseini, “Design of an optimal fuzzy controller to obtain maximum power in solar power generation system,” Solar Energy, vol. 182, pp. 161–178, 2019. [Google Scholar]
22. M. Y. Noor, Q. Peng, U. Khokhar, A. Asif, N. Abid et al., “Low cost and energy efficient fuzzy based kitchen ventilation control system,” in 2019 Int. Conf. on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, pp. 1–6, 2019. [Google Scholar]
23. S. K. Jeong, C. H. Han, L. Hua and W. K. Wibowo, “Systematic design of membership functions for fuzzy logic control of variable speed refrigeration system,” Applied Thermal Engineering, vol. 142, pp. 303–310, 2018. [Google Scholar]
24. A. Esboei and K. Gavareshki, “Using a fuzzy expert system as a decision support system to decrease time consumption in the uast development process: A case study,” Iranian Journal of Fuzzy Systems, vol. 18,no. 3, pp. 27–38, 2021. [Google Scholar]
25. G. Selvachandran, S. G. Quek, L. T. H. Lan, N. L. Giang, W. Ding et al., “A new design of mamdani complex fuzzy inference system for multiattribute decision making problems,” IEEE Transactions on Fuzzy Systems, vol. 29, no. 4, pp. 716–730, 2019. [Google Scholar]
26. S. U. D. Khokhar and Q. Peng, “Utilizing enhanced membership functions to improve the accuracy of a multi-inputs and single-output fuzzy system,” Applied Intelligence, vol. 53, pp. 7818–7831, 2023. [Google Scholar]
27. M. Fayaz, I. Ullah and D. Kim, “An optimized fuzzy logic control model based on a strategy for the learning of membership functions in an indoor environment,” Electronics, vol. 8, no. 2, pp. 132–148, 2019. [Google Scholar]
28. U. Şahin, “Projections of Turkey’s electricity generation and installed capacity from total renewable and hydro energy using fractional nonlinear grey Bernoulli model and its reduced forms,” Sustainable Production and Consumption, vol. 23, pp. 52–62, 2020. [Google Scholar]
29. M. Bilgili, A. Yildirim, A. Ozbek, K. Celebi and F. Ekinci, “Long short-term memory (LSTM) neural network and adaptive neuro-fuzzy inference system (ANFIS) approach in modeling renewable electricity generation forecasting,” International Journal of Green Energy, vol. 18, no. 6, pp. 578–594, 2021. [Google Scholar]
30. S. U. D. Khokhar, Q. Peng, A. Asif, M. Y. Noor and A. Inam, “A simple tuning algorithm of augmented fuzzy membership functions,” IEEE Access, vol. 8, pp. 35805–35814, 2020. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools