
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Reliability Analysis of Correlated Competitive and Dependent Components Considering Random Isolation Times
1 School of Computer and Communication Engineering, Changsha University of Science and Technology, Changsha, 410114, China
2 Department of Computing Science, University of Aberdeen, Aberdeen, UK
3 School of Automotive and Mechanical Engineering, Changsha University of Science and Technology, Changsha, 410114, China
* Corresponding Author: Fei Yu. Email:
Computers, Materials & Continua 2023, 76(3), 2763-2777. https://doi.org/10.32604/cmc.2023.037825
Received 17 November 2022; Accepted 23 February 2023; Issue published 08 October 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the Internet of Things (IoT) system, relay communication is widely used to solve the problem of energy loss in long-distance transmission and improve transmission efficiency. In Body Sensor Network (BSN) systems, biosensors communicate with receiving devices through relay nodes to improve their limited energy efficiency. When the relay node fails, the biosensor can communicate directly with the receiving device by releasing more transmitting power. However, if the remaining battery power of the biosensor is insufficient to enable it to communicate directly with the receiving device, the biosensor will be isolated by the system. Therefore, a new combinatorial analysis method is proposed to analyze the influence of random isolation time (RIT) on system reliability, and the competition relationship between biosensor isolation and propagation failure is considered. This approach inherits the advantages of common combinatorial algorithms and provides a new approach to effectively address the impact of RIT on system reliability in IoT systems, which are affected by competing failures. Finally, the method is applied to the BSN system, and the effect of RIT on the system reliability is analyzed in detail.Keywords
With the advancement of communication technology, the development of the IoT has reached a new stage [1,2]. In the IoT environment, all objects in our daily lives are part of the Internet, due to their communication and computing capabilities (including microcontrollers and digital communication transceivers). The IoT extends the concept of the Internet and makes it more pervasive, allowing different devices to interact while keeping their data secure (e.g., medical sensors, surveillance cameras, household appliances, etc.) [3,4]. Body Sensor Network technology [5] is one of the most critical technologies in modern IoT-based healthcare systems. The BSN system is often used to detect some physiological characteristics of people [6,7], and it is widely used in medical care, military, fitness, firefighting, and sports fields.
A BSN system consists of the following three parts: biomedical sensors [8], relay nodes, and sink nodes. In this work, sink nodes are considered to be completely reliable. Other BSN components will only suffer from local failure (LFs) and propagation failure (PFs). LF will only lead to the failure of the component itself without affecting other components in the system, while PF will not only cause the failure of the component itself but also affect other components in the system [9,10]. Note that the PFs used in this article are propagation failure with global effects (PFGEs), if one PF occurs, the entire system will fail. In the BSN system, the energy of the biosensor comes from the batteries [11,12]. If the transmission distance is long, the perceived information can be transmitted to the target through relay communication [13–15] to achieve the purpose of energy saving.
When the relay node fails, the remaining time during which a sensor node can communicate directly with the receiving device is determined by its remaining battery energy. In other words, the timing of the isolation effect is random. When the isolation effect occurs, it may have a dual effect: on the one hand, the performance of the system will be degraded, because when the biosensor is isolated, the receiving device will not receive the information it perceives on time; on the other hand, because the biosensor is isolated at this point, the PFs from this biosensor can be prevented from damaging other components in the system (such as jamming attacks [16,17], overheating, and short-circuits [18]). However, when the PF of the biosensor in the system occurs before the relay failure or the biosensor PF occurs after a relay failure but the biosensor has enough power to transmit data directly to the receiving node, there will be a propagation effect and make the whole system fail. Therefore, a time-domain competition exists between the PF isolation effect and the PF propagation effect. When the isolation effect occurs first, the system will not fail, and the BSN system will continue to work with reduced performance. Otherwise, if the propagation effect prevails, the system will fail. So, there are many existing papers on competition failure. Unfortunately, there are few papers that consider random isolation time (RIT). More details are given in Section 2.
The rest of this paper is structured as follows: Section 2 is the related work. Section 3 introduces the new combinatorial analysis algorithm. Section 4 takes the BSN system as an example to analyze the proposed algorithm. The numerical analysis is carried out in Section 5. Section 6 summarizes the work and discusses future directions.
Solving competition failure problems has become a deep research field. There are different approaches to reliability analysis for different types of functional-dependent systems. The simulation method is highly applicable to all kinds of systems in the modeling of system behavior, but the results calculated by the simulation method are usually not accurate enough and can only provide rough results. If the calculation accuracy needs to be improved, the time cost will increase, so it is not suitable for accurate calculation of the reliability of large-scale systems [19,20]. Markov method can flexibly simulate all kinds of dynamic behavior and is common to solve the problem of dynamic system reliability analysis method, but the method of Markov has the state space explosion problem [21,22].
This combination method has the advantages of high precision and high efficiency and is widely used in the reliability analysis of systems with competing faults. The combinatorial algorithm is used to solve the reliability analysis problem of single-stage [23] and multi-stage [24] systems in deterministic competitive faults. For probabilistic competitive faults [25], random fault propagation time [26] is considered. The failure propagation time [27] is considered from the multi-function dependency group and the cascading [28] behavior is considered in competitive failure.
In the case of relay failure, the study of random isolation time (RIT) and competition effect becomes very important in reliability analysis. However, as far as we know, few existing works consider or assume zero RIT when conducting reliability analyses. Although the literature [29] considered the effect of competing failures and random isolation times on system reliability, the approach in this work assumes that when transmitting data, the biosensors cannot use the same relay node, and is therefore not applicable to systems in which the same relay needs to be used for transmission.
In this paper, the failure of the competition combination method was improved compared with existing methods. This article considers the effects of competitive failure and random isolation time on system reliability and allow different biological sensors to use the same relay when transmitting data, solving the problem of data transmission among different biological sensors in the system that need to use the same relay. At the same time, the system element in this method can follow any failure time distribution. Please note that although this article is based on a discussion of BSN systems, the competitive failure behavior and the proposed method can be applied to other application systems, such as computer networks, smart homes, smart grids, etc.
According to the total probability theorem and divide-and-conquer principle, the reliability of the BSN system with competitive effect can be decomposed into several independent simplified problems without competitive effect.
3.1 Establish Fault Tree(FT) Model and Separate PF
The FT model is used to express the system’s fault behavior by ignoring the components’ propagating failure behavior. In the BSN system, the BSN system failing is the top event, and the relay component failure and the dependent component failure is the basic event. The sensor communicates with the receiver through the relay; thus, there is a functional dependency between the sensor and the relay. The functional dependency (FDEP) behavior in the dynamic FT model can be modeled in Fig. 1.

Figure 1: Functional dependency behavior in BSN
Note that the failure probability of component i should be replaced by the conditional failure probability of component i (denoted as
3.2 Build Event Space according to Relay LF and Dependent Components PF
The next step is to construct an event space to consider all possible combinations of failure states for the relay component and dependent components. In the system under consideration, there exists one relay node T and n dependent nodes
Table 1 provides the definition of

In BSN system, SR is used to indicate system reliability. According to the event space
Because the system will occur propagation effects at
3.3 Address Propagation Effects and Isolation Effects
where
where
3.4 Reliability of the Integrated BSN
By calculating
Fig. 2 gives a BSN system with five nodes. More specifically, biosensors

Figure 2: BSN model
When T experiences LF,
4.1 Establishing the FT Model and Separating PF
The modeling of the BSN system is shown in Fig. 3. The top event of this dynamic FT model is the BSN system fault, the basic event is the local fault of the relay node and biosensor nodes, and the FDEP gate simulates functional dependence behavior in the relay node and biosensor nodes. Applying Eq. (1),

Figure 3: FT of the BSN mode
4.2 Constructing the Event Space
According to Fig. 2, this BSN system has one relay node and two dependent nodes. The event space is built as defined in Section 3.2, as shown in Table 2. According to Eq. (5) and the event space definition provided in Table 2,

4.3 Calculating
Fig. 4a presents the simplified system FT model for evaluating
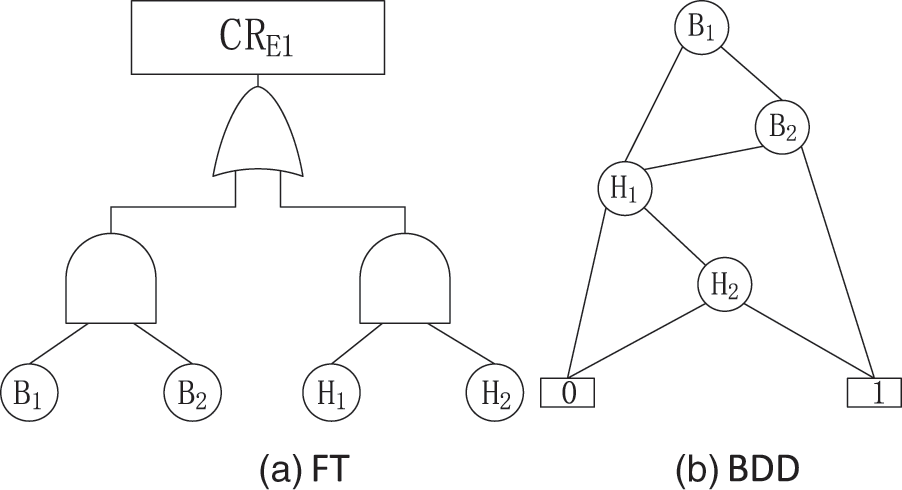
Figure 4: The FT and BDD of
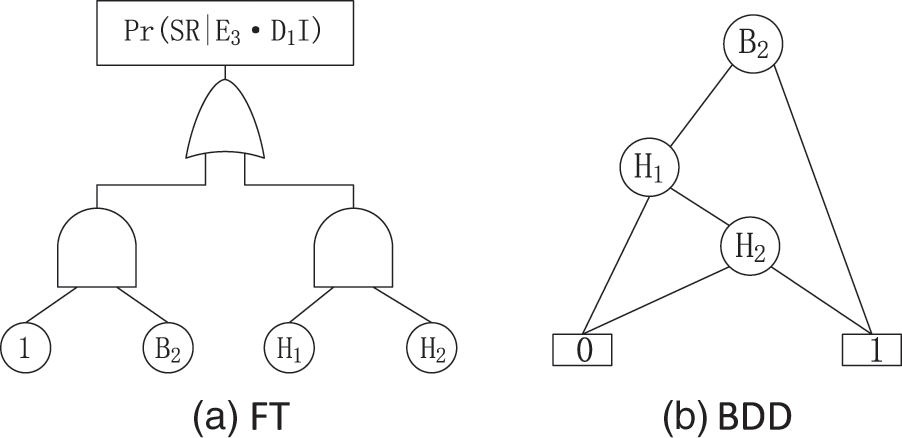
Figure 5: The FT and BDD of
Similarly,
4.4 Integrated System Reliability
By calculating
The combined method employed herein is suitable for any failure time distributions of biosensors. The numerical analysis of system reliability in this paper is based on Weibull distribution in Weibull distribution. The probability density function for a random variable c conforming to a Weibull distribution is given below; where,
The expectation or average of c is as follows:
Let

5.1 Impact of RIT on System Reliability
This section studies the effect of RIT of dependent components
For ease of calculation,

According to the data given in Table 4, the reliability of the system decreases with an increase in task duration. Because the probability of failure of a biosensor in the system increases with increasing mission time. Obviously, the reliability of the system will continue to decrease under these circumstances.
In all cases, the system will exhibit different levels of reliability with different values of
In more detail, with the increase of

5.2 PF Impact on System Reliability
As summarized in Table 6, when the value of

As can be seen from the results in Table 6, when the
5.3 Impact of LF on System Reliability
Table 7 summarizes when the value of

The results in Table 7 show that the reliability of the entire system will change to a certain extent when the
As far as we know, there are few algorithms for random isolation time. Table 8 lists the combinatorial algorithms for calculating system reliability with three competing failures.

Note that when the number of dependent nodes is reduced to one, the method presented in this article is the same as for C3. Assume that only
In IoT systems, the energy of the biosensor comes from the batteries. Because of the existence of FDEPs, there are propagation effects and isolation effects compete with each other in time and have to consider the RIT problem However, to the best of our knowledge, existing working assumptions assume that isolation time is zero or that the relay node supports only one dependent node. In this paper, a combination method is proposed for computational reliability analysis to analyze RIT behavior. Although the Weibull distribution is used in this case, the method can be used for any type of failure time distribution. This method can decompose complex problems and then calculate them by traditional methods. Note that although the BSN system is used in this case study, the method can be used for any wireless communication system. Notably, this method assumes that the biosensor can only use one relay for data transmission. In our future work, we intend to allow multiples of the same sensor to use different relay nodes for data transmission, solving the problem of correlation between multiple groups of related FDEP.
Acknowledgement: The authors also gratefully acknowledge the helpful comments and suggestions of the reviewers, which have improved the presentation.
Funding Statement: This work was supported by the National Natural Science Foundation of China (NSFC) (Grant No. 62172058) and the Hunan Provincial Natural Science Foundation of China (Grant Nos. 2022JJ10052, 2022JJ30624).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Shuo Cai and Tingyu Luo; data collection: Tingyu Luo and Fei Yu; analysis and interpretation of results: Shuo Cai and Pradip Kumar Sharma; draft manuscript preparation: Weizheng Wang. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used for the findings of this study are available within this article.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. K. R. S. Reddy, C. Satwika, G. Jaffino and M. K. Singh, “Monitoring of infrastructure and development for smart cities supported by IoT method,” in Proc. of Int. Conf. in Mechanical and Energy Technology, Singapore, Springer, pp. 21–28, 2023. [Google Scholar]
2. S. Ali and S. Parveen, “IoT-based smart healthcare monitoring system: A prototype approach,” Ph.D. Dissertation, Jamia Hamdard University, India, 2023. [Google Scholar]
3. J. Wang, W. Chen, L. Wang, Y. Ren and R. S. Sherratt, “Blockchain-based data storage mechanism for industrial Internet of Things,” Intelligent Automation and Soft Computing, vol. 26, no. 5, pp. 1157–1172, 2020. [Google Scholar]
4. A. Vangala, A. K. Das, Y. H. Park and S. S. Jamal, “Blockchain-based robust data security scheme in IoT-enabled smart home,” Computers, Materials & Continua, vol. 72, no. 2, pp. 3549–3570, 2022. [Google Scholar]
5. N. I. Hossain and S. Tabassum, “An IoT-enabled electronic textile-based flexible body sensor network for real-time health monitoring in assisted living during pandemic,” in ISQED, Santa Clara, CA, USA, pp. 1–5, 2022. [Google Scholar]
6. I. Borz, T. Palade, E. Puschita and A. Pastrav, “Wireless sensor networks for healthcare monitoring,” in Int.Conf. on Advancements of Medicine and Health Care Through Technology, Cham, Springer, pp. 232–239, 2020. [Google Scholar]
7. A. M. Abbas, “Body sensor networks for healthcare: Advancements and solutions,” Ph.D. Dissertation, Aligarh Muslim University, India, 2022. [Google Scholar]
8. J. Wang, Y. Gao, C. Zhou, S. Sherratt and L. Wang, “Optimal coverage multi-path scheduling scheme with multiple mobile sinks for WSNs,” Computers, Materials & Continua, vol. 62, no. 2, pp. 695–711, 2020. [Google Scholar]
9. L. Xing and G. Levitin, “Combinatorial analysis of systems with competing failures subject to failure isolation and propagation effects,” Reliability Engineering & System Safety, vol. 95, no. 11, pp. 1210–1215, 2010. [Google Scholar]
10. G. Levitin and L. Xing, “Reliability and performance of multi-state systems with propagated failures having selective effect,” Reliability Engineering & System Safety, vol. 95, no. 6, pp. 655–661, 2010. [Google Scholar]
11. J. Liang, Q. Sun, X. Wang, J. Xu, H. Wang et al., “Coverage control for underwater sensor networks based on residual energy probability,” Computers, Materials & Continua, vol. 73, no. 3, pp. 5459–5471, 2022. [Google Scholar]
12. J. Wang, Y. Gao, X. Yin, L. Feng and J. K. Hye, “An enhanced PEGASIS algorithm with mobile sink support for wireless sensor networks,” Wireless Communications and Mobile Computing, vol. 2018, no. 1, pp. 5459–5471, 2018. [Google Scholar]
13. S. Yousaf, N. Javaid, Z. A. Khan, Q. Umar, I. Muhammad et al., “Incremental relay based cooperative communication in wireless body area networks,” Procedia Computer Science, vol. 52, no. 1, pp. 552–562, 2015. [Google Scholar]
14. D. K. Rout and S. Das, “Hybrid relaying for sensor to external communication in multi relay body area networks,” in IEEE. Int. Conf. on SPICES, Kozhikode, India, pp. 1–5, 2015. [Google Scholar]
15. A. Dasgupta, M. M. Mennemanteuil, M. Buret, C. Nicolas, A. Bouhelier et al., “Optical wireless link between a nanoscale antenna and a transducing rectenna,” Nature Communications, vol. 9, no. 1, pp. 1–7, 2018. [Google Scholar]
16. K. Grover, A. Lim and Q. Yang, “Jamming and anti-jamming techniques in wireless networks: A survey,” International Journal of Ad Hoc and Ubiquitous Computing, vol. 17, no. 4, pp. 197–215, 2014. [Google Scholar]
17. X. Fu and Y. Yang, “Analysis on invulnerability of wireless sensor networks based on cellular automata,” Reliability Engineering & System Safety, vol. 212, no. 1, pp. 110–123, 2021. [Google Scholar]
18. J. Lamb, C. J. Orendorff, A. M. Steele and S. W. Spangler, “Failure propagation in multi-cell lithium ion batteries,” Journal of Power Sources, vol. 283, no. 1, pp. 517–523, 2015. [Google Scholar]
19. E. Gascard and A. Simeu-Abazi, “Quantitative analysis of dynamic fault trees by means of Monte Carlo simulations: Event-driven simulation approach,” Reliability Engineering & System Safety, vol. 180, no. 1, pp. 487–504, 2018. [Google Scholar]
20. G. Ökten and Y. Liu, “Randomized quasi-Monte Carlo methods in global sensitivity analysis,” Reliability Engineering & System Safety, vol. 210, no. 1, pp. 300–309, 2021. [Google Scholar]
21. O. Yevkin, “An efficient approximate Markov chain method in dynamic fault tree analysis,” Quality and Reliability Engineering International, vol. 32, no. 4, pp. 1509–1520, 2016. [Google Scholar]
22. B. Wu and L. Cui, “Reliability evaluation of Markov renewal shock models with multiple failure mechanisms,” Reliability Engineering & System Safety, vol. 202, no. 1, pp. 109–121, 2020. [Google Scholar]
23. C. Wang, L. Xing and G. Levitin, “Competing failure analysis in phased-mission systems with functional dependence in one of phases,” Reliability Engineering & System Safety, vol. 108, no. 1, pp. 90–99, 2012. [Google Scholar]
24. Y. Wang, L. Xing, G. Levitin and N. Huang, “Probabilistic competing failure analysis in phased-mission systems,” Reliability Engineering & System Safety, vol. 176, no. 1, pp. 37–51, 2018. [Google Scholar]
25. P. Su and G. Wang, “Reliability analysis of network systems subject to probabilistic propagation failures and failure isolation effects,” Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, vol. 236, no. 2, pp. 290–306, 2022. [Google Scholar]
26. L. Xing, G. Zhao, Y. Wang and Y. Xiang, “Reliability modeling of correlated competitions and dependent components with random failure propagation time,” Quality and Reliability Engineering International, vol. 36, no. 3, pp. 947–964, 2020. [Google Scholar]
27. C. Wang, L. Xing, R. Peng and Z. Pan, “Competing failure analysis in phased-mission systems with multiple functional dependence groups,” Reliability Engineering & System Safety, vol. 164, no. 1, pp. 24–33, 2017. [Google Scholar]
28. G. Zhao and L. Xing, “Reliability analysis of IoT systems with competitions from cascading probabilistic function dependence,” Reliability Engineering & System Safety, vol. 198, no. 1, pp. 35–50, 2020. [Google Scholar]
29. G. Zhao and L. Xing, “Reliability analysis of body sensor networks subject to random isolation time,” Reliability Engineering & System Safety, vol. 207, no. 1, pp. 50–62, 2021. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools