
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Efficient Power Control for UAV Based on Trajectory and Game Theory
1 Information Assurance and Security Research Group (IASRG), School of Computing, Faculty of Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
2 Faculty of Computing and Informatics, University Malaysia Sabah, Kota Kinabalu, Malaysia
3 Department of Computer Science, College of Computers and Information Technology, Taif University, Taif, Saudi Arabia
* Corresponding Author: Fadhil Mukhlif. Email:
Computers, Materials & Continua 2023, 74(3), 5589-5606. https://doi.org/10.32604/cmc.2023.034323
Received 13 July 2022; Accepted 28 September 2022; Issue published 28 December 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Due to the fact that network space is becoming more limited, the implementation of ultra-dense networks (UDNs) has the potential to enhance not only network coverage but also network throughput. Unmanned Aerial Vehicle (UAV) communications have recently garnered a lot of attention due to the fact that they are extremely versatile and may be applied to a wide variety of contexts and purposes. A cognitive UAV is proposed as a solution for the Internet of Things ground terminal’s wireless nodes in this article. In the IoT system, the UAV is utilised not only to determine how the resources should be distributed but also to provide power to the wireless nodes. The quality of service (QoS) offered by the cognitive node was interpreted as a price-based utility function, which was demonstrated in the form of a non-cooperative game theory in order to maximise customers’ net utility functions. An energy-efficient non-cooperative game theory power allocation with pricing strategy abbreviated as (EE-NGPAP) is implemented in this study with two trajectories Spiral and Sigmoidal in order to facilitate effective power management in Internet of Things (IoT) wireless nodes. It has also been demonstrated, theoretically and by the use of simulations, that the Nash equilibrium does exist and that it is one of a kind. The proposed energy harvesting approach was shown, through simulations, to significantly reduce the typical amount of power that was sent. This is taken into consideration to agree with the objective of 5G networks. In order to converge to Nash Equilibrium (NE), the method that is advised only needs roughly 4 iterations, which makes it easier to utilise in the real world, where things aren’t always the same.Keywords
Rapid changes in mobile internet have also made it difficult for mobile wireless networks to be designed well, especially when it comes to delivering very high data speeds with very little time delay. This is especially the case because of the rapid changes in mobile internet. According to a recent report by the International Telecommunication Union (ITU), the amount of data that is transmitted through cellular networks is expected to increase 10,000 times over the course of the next five years in comparison to 2010. The ultra-dense network (UDN) strategy ought to have the ability to accommodate the requirements of an increasing volume of data flow [1,2]. The network coverage can be successfully expanded, and the overall throughput may be increased, by utilising flexible deployment and the establishment of several small cell base stations (SBSs) with low transmit power [3]. The majority of the research that is being done on UDNs right now is geared toward enhancing the functionality of terrestrial heterogeneous cellular networks. This is accomplished through the management of components such as user association in heterogeneous ultra-dense scenarios, Wi-Fi, and energy-efficient frequency reuse in heterogeneous small cell networks [4,5].
In recent years, networking and communication between UAVs have been quite popular due to the fact that they are highly speedy and may be employed in a variety of various ways. There is the potential for a great deal of success to result from combining the usage of UAVs and UDNs [6,7]. It is simple to employ UAVs as an alternative to the conventional land-based infrastructure in order to deliver wireless services to customers in any location. Another prospective usage for these devices is as base stations (BSs) in public gathering places like stadiums and campuses where there is no existing cellular infrastructure [8,9]. When users are located in various areas and are unable to communicate with one another in a direct manner, flying relays may be utilised. UAVs have the potential to assist in ensuring a smooth transition for users who are relocating. The majority of the time, line of sight (LOS) communication links, also known as “nearly line of sight” links, can be created by manoeuvring UAVs in a variety of different ways. As a direct consequence of this, the functionality of the system can be significantly enhanced. UAVs have the potential to either transport energy sources for wireless nodes or act as energy sources for wireless nodes themselves, so extending the lifespan of the network. Cable charging is incompatible with certain software platforms and networks, including the IoT and wireless sensor networks [10,11].
The IoT will be a significant contributor to the development of successful wireless networks and the subsequent generation of mobile communications [12]. Recent advancements in the installation of the Internet of Things have resulted in a substantial rise in the volume of information that is being shared [13]. Communication systems need to have greater room, quicker speeds, faster arrival times, and less energy consumption in order for the internet to be a successful venture [14]. IoT applications and advances must also overcome significant challenges that have never been encountered before because of energy restrictions of wireless devices. For the Internet of Things to become more widespread, it will need to find a solution to one of its most significant challenges: how to make use of renewable energy (IoT). Wireless Power Transfer (WPT) technology might be a good approach to deliver sustainable energy and overcome the energy bottleneck that the Internet of Things is experiencing [15]. Soon, more wireless devices will make use of WPT technology, which will reduce the amount of battery power they require. Numerous technologies, including as electric cars and medical devices that are implanted in the body, use wireless power transmission to provide power to their components. UAV, which stands in contrast to typical wireless networks, makes it possible for Internet of Things devices to freely move around, collect data, share services, and obtain power [16,17]. In a hypothetical scenario, high-altitude UAV navigation may also deliver all the power that wireless devices require in a more expedient and adaptable manner [18,19]. The UAV was able to assist WPT in improving the functionality of IoT-UDN by dynamically switching between different power sources.
This research project investigates how the Internet of Things (IoT) system allocates its resources and how unmanned aerial vehicles (UAVs) can assist in wirelessly powering the IoT. In order to investigate how resources are distributed among UAV nodes and wireless IoT devices, a non-cooperative game theory was utilised. To collect energy for Internet of Things nodes, drones are deployed. This is the solution that has been suggested. When wireless power transmission is utilised to power wireless nodes, drones are employed as a floating power source to power the drones themselves. The resources are going to be split between the drones and the wireless nodes. The method of game theory is applied to locate the Nash equilibrium and discover a solution to this problem. Unmanned Aerial Vehicles (UAVs) utilise Nash Equilibrium to determine the most efficient way to distribute their power sources, which enables them to transmit electricity without the usage of wires.
The most significant takeaways from the research are as follows:
1. IoT wireless power can be generated by UAVs; even just one UAV with a large number of wireless nodes is sufficient. Drones utilise wireless power transfer technology for the purpose of harvesting wireless nodes. The data transmission process is powered by the energy that is collected by wireless nodes.
2. A simulation of the process by which wireless local area network (WLAN) nodes and UAVs must share resources might be carried out with the help of a competitive game of power control. In the made-up game, the drone has perfect control over its source of energy transfer, and the wireless node has perfect control over its source of information transfer.
3. Ground sensors that have a lot of internet of things capabilities are being looked at as a solution to the problem of non-cooperative power control game theory.
4. The game of power control has reached a point of Nash equilibrium at this point. In addition, it has been demonstrated that the game that has been proposed and its Nash do in fact exist and are one of a kind.
5. An iterative power control strategy is a good fit for the unmanned aerial vehicle situation, as well as its Sigmoid and Spiral trajectories, which are presented in this study.
6. The findings of the simulation indicate that the method of the proposed algorithm is beneficial.
The rest parts of the text are organised as follows: In Section 2, we discuss the overall system model as well as the construction process for games. In order to demonstrate, in a mathematical sense, that the proposed equations in Section 3 are accurate, game theory was utilised. Information pertaining to the algorithm is presented in Section 4 of the aforementioned document. New concepts for the green transmission algorithm were conceived as a direct result of the simulation results and the throughput performance, which are covered in Section 5. The most important findings of the study and a conclusion are outlined in the 6th section.
2 System Model and Game Formulation
As a result of their mobility, unmanned aerial vehicles (UAVs) offer advantages that cannot be matched by conventional infrastructures on the ground, which are rooted in one location. The manner in which and the timing of any changes made to UDNs will be significantly influenced by UAVs. UAVs, sometimes famous as drones, are depicted functioning as mobile energy generators in Fig. 1. Additionally, unmanned aerial vehicles (UAVs) have the ability to transport a source of energy or even provide that source of energy themselves, so extending the network’s operational lifetime. The IoT and sensor networks are required to be employed in situations when cable charging is not a possibility.
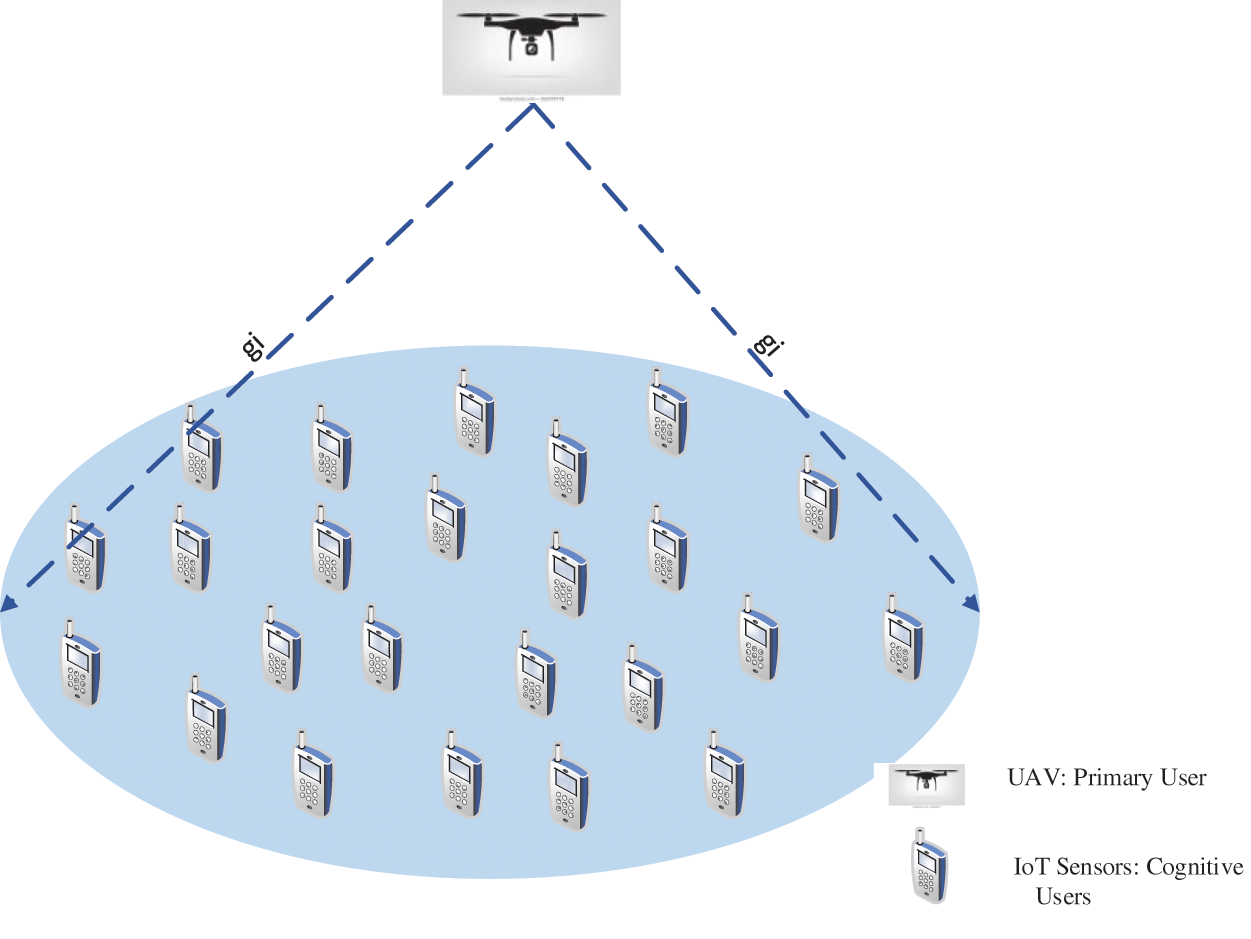
Figure 1: System model of UAV supported IoT energy transfer
UDNs typically consist of sensor nodes, communication nodes that are used for device-to-device (D2D) and machine-to-machine (M2M) connections, and other wireless nodes that are dispersed throughout a large region. It is difficult to reduce energy consumption while keeping networks operational for an extended period of time due to the fact that batteries continue to be the primary source of power for many networks. It is possible to spend a significant amount of time and resources in order to regularly recharge or replace the battery packs in large nodes [10]. It is necessary for the unmanned aerial vehicle (UAV) to be able to hover close to the wireless nodes for it to be able to transfer data and charge them. We searched for the most efficient method of putting the system’s resources to use to wirelessly transmit data and power to the IoT. The IoT nodes that are a part of our complex systems transmit data to the UAVs that are powered by those same nodes. Wireless nodes have the potential to be powered by moving sources like UAVs or drones. Drones have the ability to collect any and all data transmitted by wireless nodes. In this particular research project, wireless nodes throughout the IoT ecosystem were powered by drones.
In this article, we take a look at the most significant aspects of UAV-based wireless communication, which is based on UAV-drones and IoT nodes that are located on the ground. The three-dimensional (3D) position of the unmanned aerial vehicle’s (UAV) trajectory design is shown as
We determine the route of the unmanned aerial vehicle (UAV) by taking into consideration its position
Most of the time, a UAV’s path is set by the following time intervals:
Maximum speed (Vmax), and the fastest speed that is allowed (
In this case, q[0]=[x[0],y[0]]T stands for where the UAV starts in the horizontal plane.
Communication between aircraft and ground stations is different because the line of sight (LoS) is most probably to spread out in a three-dimensional space [20]. So, the environment has a bigger effect on the amount of LoS than was thought before. However, the effects of propagation blockage [21] like building blockage still exist for the complete channel models. So, large-scale Rayleigh and free-space fading models are the best for ATG channels. The distance between ground nodes and UAVs can be written as for each elemental time slot:
Here, at t
Here
They are written as
When a UAV is linked to its ground nodes, the path loss expression is:
In this case, the average extra losses for LoS and non-line of sight (NLoS) are given by
Los is thought to be the most important model for free-space path loss [24]. Here’s how to figure out the channel gain for time slot t, defined as:
Actually,
The drone’s power is used to send data from a wireless node to a drone. Using the power source of a wireless contract, data can be sent, and generate revenue. All IoT nodes in a protected zone are in the same class and use the same channel to talk to each other [26] can utilizing signal to interference ratio (SIR) to imply the income based on the data transmission, it can be displayed as control level relating to data transmission:
where,
Except for the
Cognitive IoTs make it illegal to cause more interference than is allowed by the interference temperature, interference temperature limit is expressed as:
In the non-cooperative game theory power allocation approach for spectrum sharing, the amount of power each node uses are lowered to meet the predefined requirements for SIR to find the target and to give communication systems a maximum amount of interference they can handle. Using the non-cooperative game theory, IoT nodes that are connected to the system can work in a Nash game in a way that maximises their own utility. There is no doubt that the Nash equilibrium exists and is the only one of its kind. Because of what we found, we’ve made an iterative power allocation method with low processing costs and shown that fast convergence is important in games with multiple nodes. Due to a predetermined SIR need for target identification and a maximum interference tolerance limit, this work can’t reach its main goal, which is to reduce each node’s power consumption and make the best use of transmission power. This is why game theory is seen as a good mathematical tool that considers the rational and self-interested actions of the players. Nodes often compete against each other to win a reward, and they choose a strategy based on how well they can send information.
The way players interact in the non-cooperative power allocation game can be thought of in the following ways:
The integers
In cognitive networks, information is sent from transmitters to receivers using M bit frames or packets of data. With a data rate of
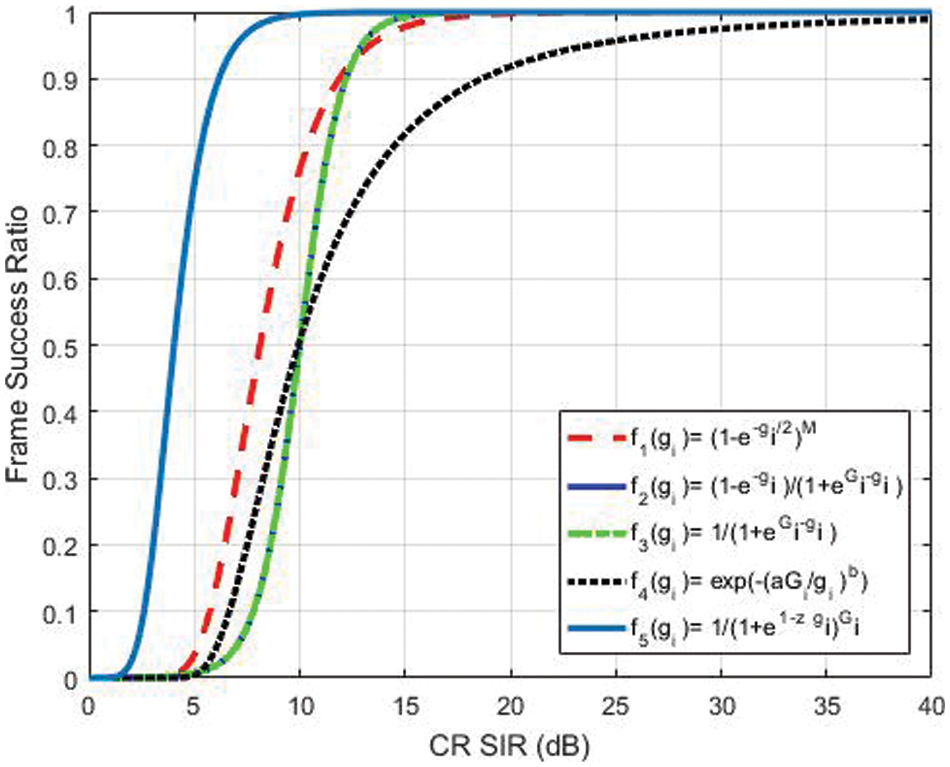
Figure 2: Proposed efficiency function (f5) compared to functions in [30–32] and [33]
Furthermore, the user’s transmission power and pricing function have been considered to improve efficiency even more. Also included, as shown below, are a sigmoid efficiency function as a fraction of exponential power ratio power multiplied by tuning factor (z) and total power to target SIR:
Fig. 3 presents how the proposed utility can be made more efficient by tuning factor vs. others in the literature. The decrease in value of the parameter z results in an increase in utility and a decrease in the transmitting power, but it also results in a decrease in target of SIR pertaining to the system. Furthermore, the primary system can transmit the tuning factor z with the help of cognitive networks for adjusting the targeted SIR based on interference. When the sum of interference is about to reach the limit of interference temperature, a lower value of z is sent by the primary system. Eq. (14) can be used to show the utility function for the i th cognitive node.
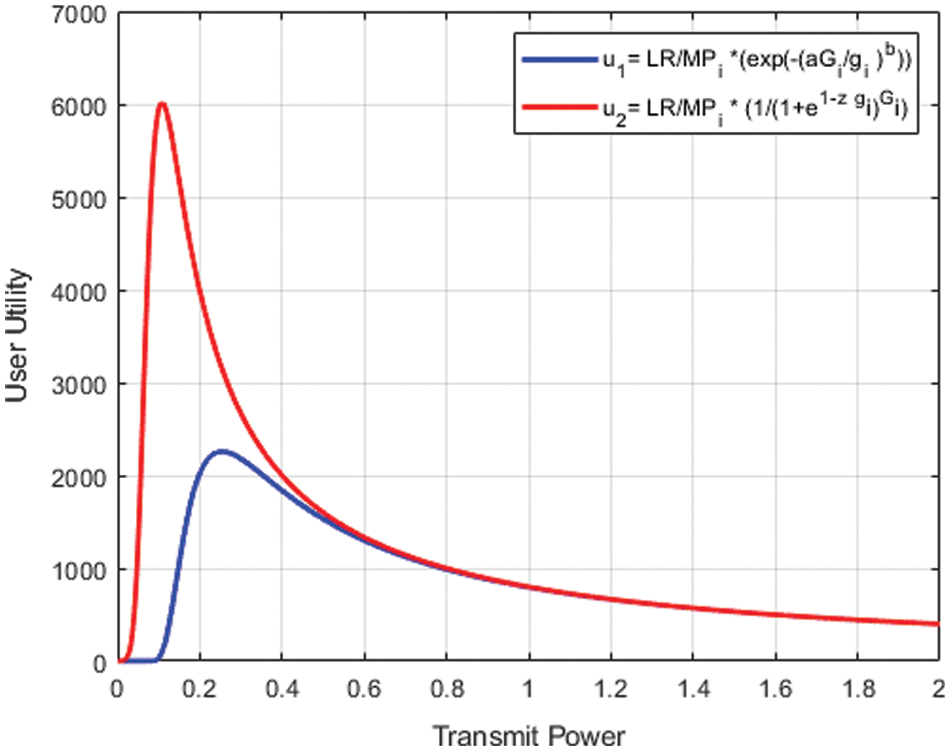
Figure 3: Proposed utility u2 compared to u1 [30]
Power control that doesn’t work with other nodes hurts them and costs them money. This makes the Nash equilibrium less effective than it should be. The pricing idea was put in place to get users to use as many network resources as possible. Here’s how a power-control game based on prices works when players don’t work together:
where,
Therefore, the proposed pricing function is detailed as:
One of our ideas for improving system performance is to change the way prices work so that CRs are rewarded for making better use of system resources. This design participates by influencing the next taken a toll for clients who are most remote from the base station and utilize more power.
So, instead of the usual linear way of pricing transmission power, we use an exponential power function. Pricing functions for the power strategy [0, 1] have probably been completed numerically, with power transferred by different users covering a range from minimum to maximum. If the transmission power is low and the network is close, it’s easier to get lower prices.
If the transmission power is high and the network is far away, it’s harder. So, the pricing system for this paper can be summed up as follows:
In this case, the price factor is shown by the c and
3 Existence and Uniqueness of Nash Equilibrium
In this part, a mathematical illustration related to the individuality and existence is given in the next section [34]:
Definition 3.1: Nash equilibrium in the EE-NGPAP method can be described as the power vector, e.g.,
3.1 Nash Equilibrium Existence
The Nash equilibrium in the suggested method gives a stable and predictable results where numerous CRs with opposing activities contribute and go to a position where no contributor can request to set its own method form. To emphasize NE’s being exist, the below theorem is suggested:
Theorem 3.1: The Nash equilibrium is appeared in
1) The profile action approach (i.e.,
2) The function of utility
Proof: It can be obtained by proving that both the criteria provided in Theorem 3.1 are satisfied by EE-NGPAP. It is corroborated by the following evidence:
1) As every cognitive uses a strategy outline well-defined by optimal and minimal power as given in Eq. (15), the first condition is promptly satisfied.
2) For proving that the second criterion is also satisfied, the given utility function based on variable pricing must be shown to be concave in
Definition 3.2: Based on [35] Super Modular definition 5, The utility function
To show this condition is true, the Equations:
Lemma 3.1: The utility function based on pricing provided in Eq. (20) is concave in
Considering that both the criteria are given in Theorem 3.1 are satisfied, the recommended EE-NPGP is a concave n-player game having one or more NE in it.
3.2 Nash Equilibrium Uniqueness
The approach defines of the players consists of the recommender concave and continuous application function accordingly, NE is present in EE-NGPAP. However, a question can also rise at this juncture obviously: Is the existence of the NE unique? the distinctiveness of NE may be tested as follows:
Definition 3.3: An alternative NE definition is the best response strategy which can be defined as per the following:
Additionally, the best approach for reaction is a set consist of exactly a single maximum point that will increase the objective function, which is mathematically formulated as follows:
Likewise, the second derivative has been demonstrated to be bigger than zero, which means that the maximum point is the optimal unique point.
Theorem 3.2: The NE of the EE-NGPAP game is
Proof: The key feature of the uniqueness of NE is to confirm that a typical function is the best approach for response. For the suggested game, EE-NGPAP =
To prove the uniqueness of NE, the function for the most suitable response must be a regular function and be required to have the following traits as well [37]:
1) Positivity:
2) Monotonicity: given
3) Scalability: given, for all
Furthermore, it’s been proven in [38] that if a fixed point from Eq. (21) satisfies the traits as stated previously, so the BR(P-i) proceeds towards a fixed point. For this reason, based on [38], a fixed point in Eq. (21) meets the positivity, monotonicity and scalability under the particular conditions stated in theorem 3.1.
Finally, a standard function should be utilized as the most excellent reaction function. Hence, the proposed non-cooperative has as it been an only one NE solution that fulfils the prove of the uniqueness of the Nash Equilibrium.
In order to locate the point at which the model proposed in this article is in a state of equilibrium, an iterative distributed technique of power allocation is applied. To locate the Nash Equilibrium, point for the model that has been provided, the suggested algorithm approach requires that each cognitive node decide on its own what the ideal transmission power SIR value is at each time step. It is believed that EE-NGPAP is the ideal protocol for this paradigm due to the fact that each IoT node just needs to know how to send to all of the other nodes. It is not necessary for it to have any knowledge of the system. A distributed process with pseudo-code can be used to describe the iterative power allocation and pricing method. This method assumes a unique Nash equilibrium with the proposed model.
Nevertheless, we assume that each cognitive node updates it’s transmit power at time instances
_________________________________________________________________________________________________________________________________________
EE-NGPAP
I. Initialize vector of transmit power
II. Initialize UAV’s Trajectory
a) Sigmoid
b) Spiral
III. Inner Iteration:
For all
a) Update
b) Update
c) Given
d) Assign the transmit power as
IV. Convergence Step:
If
Else:
V. Exit Inner Iteration (Best Response (BR) Iteration)
VI. End
_________________________________________________________________________________________________________________________________________
Actually,
5 Simulation Results & Discussion
To set up the simulation environment, the MATLAB software was utilised. The suggested algorithm was put to the test in an area that was

This regulation cannot be broken in any way, shape, or form. The spiral trajectory is depicted in Fig. 4, in which blue colour refer to the default nodes, that can be interpreted as a spiral path with IoT sensor nodes scattered all over the place to demonstrate the system model. In this particular instance, the default colour for the nodes is blue. Furthermore, sigmoid trajectory is demonstrating in Fig. 5 in which yellow colour refer to the default nodes. However, in order to fulfil their contractual duties and generate the most money feasible, drones are required to transmit power to wireless nodes. As the game progresses, the drones will be required to transfer an increasing amount of electricity in order to fulfil the terms of their cell phone contracts and earn more money. In addition, spiral, sigmoid paths and a power-management game are utilised to transport energy to nodes at the precise moment that it is required.
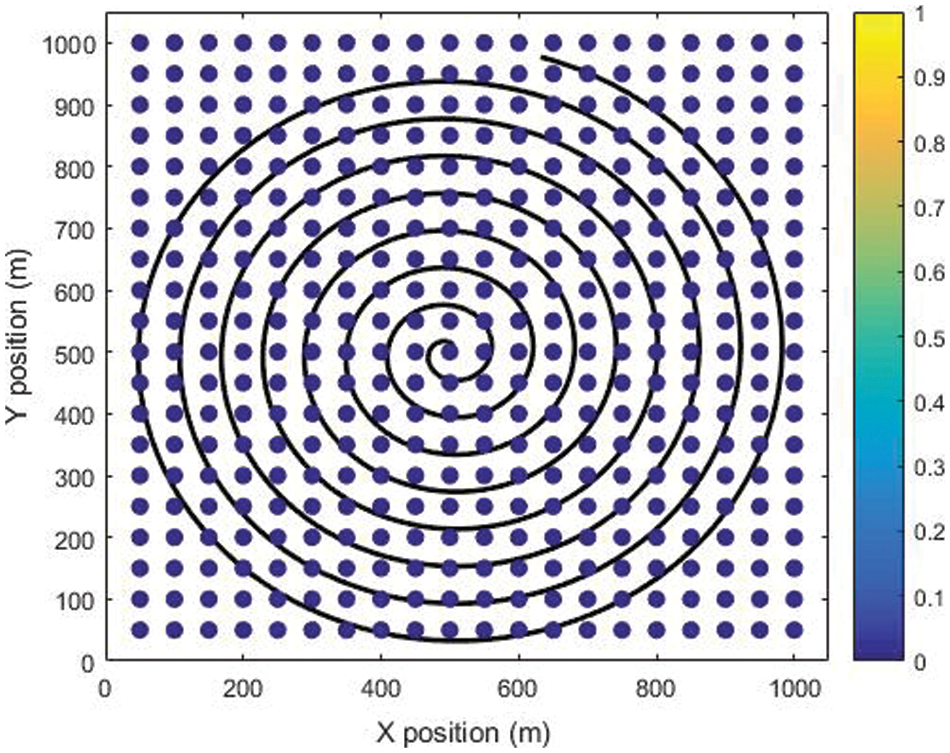
Figure 4: Spiral trajectory UAV scenario based dense IoT sensors

Figure 5: Sigmoid trajectory UAV scenario based dense IoT sensors
It has been determined that a maximum flight speed of

Figure 6: UAV sigmoid & spiral trajectories without game of different flying time for H = 100 m
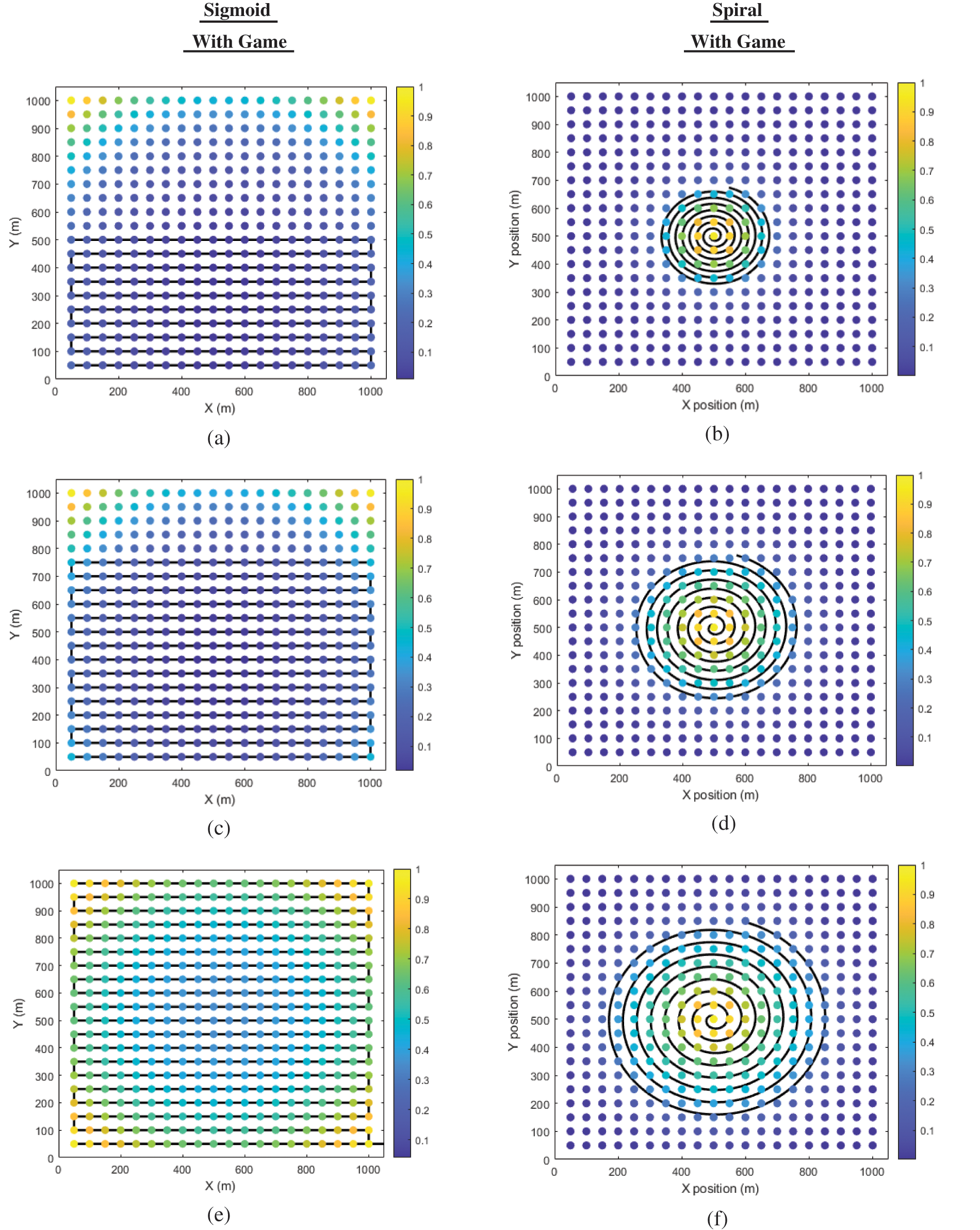
Figure 7: UAV sigmoid & spiral trajectories with game of different flying time for H = 100 m
The discount factor influences the best policies for wireless nodes when utilizing Nash equilibrium among players, which our approach represents as an IoT node, at a height of 100 metres and with multiple average flying times as
Hence, we assumed that all nodes belonging to the same category are the same so that consumers would have an easier time comprehending the simulations we created. Figs. 6 and 7 are presented below. By lingering for longer, drones increase the amount of energy they use to convey information, which in turn increases the amount of energy they use. Even as energy unit prices are transferred over time by increasing hover time. IoT contracts are getting stronger as a result of drones increasing the level of wireless power delivery by increasing their average flight time to meet more wireless contract requirements. This is demonstrated in Fig. 7 with its sub-figures (e) and (f), separately. If the IoT node is able to generate more energy on its own, it will be able to transfer data for a longer period of time.
The EE-NGPAP algorithm which stands for non-cooperative game theory power allocation with pricing, was proposed as a method for controlling power in cognitive UAV networks with two trajectories (Sigmoid and Spiral) that contain IoT wireless nodes by the authors of this paper. In addition to this, a new energy harvesting function was proposed and simulations as well as mathematical arguments were utilised to demonstrate that the Nash equilibrium does in fact exist and is distinct from any other equilibrium. The simulations demonstrated that the method of non-cooperative power control was superior to other ways in terms of its ability to save energy. The recommended approach to energy collecting requires only 4 iterations to achieve NE, which makes it a more attractive option for potential enhancements to IoT technology in the near future. More research needs to be done on the concept of employing an unmanned aerial vehicle (UAV) as a moveable source of energy so that it can be put to use in the not-too-distant future. The application of machine learning in unmanned aerial vehicle (UAV) communications will be the subject of one of our next research projects.
Funding Statement: The authors are grateful to the Taif University Researchers Supporting Project number (TURSP-2020/36), Taif University, Taif, Saudi Arabia.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. F. Mukhlif, K. A. B. Noordin, A. M. Mansoor and Z. M. Kasirun, “Green transmission for C-RAN based on SWIPT in 5G: A review,” Wireless Networks, vol. 25, no. 5, pp. 2621–2649, 2019. [Google Scholar]
2. N. Bhushan, J. Li, D. Malladi, R. Gilmore, D. Brenner et al., “Network densification: The dominant theme for wireless evolution into 5G,” IEEE Communications Magazine, Article, vol. 52, no. 2, pp. 82–89, 2014. [Google Scholar]
3. M. Kamel, W. Hamouda and A. Youssef, “Ultra-dense networks: A survey,” IEEE Communications Surveys & Tutorials, vol. 18, no. 4, pp. 2522–2545, 2016. [Google Scholar]
4. L. Y. Su, C. Y. Yang and C. L. I, “Energy and spectral efficient frequency reuse of ultra dense networks,” IEEE Transactions on Wireless Communications, vol. 15, no. 8, pp. 5384–5398, 2016. [Google Scholar]
5. S. Samarakoon, M. Bennis, W. Saad, M. Debbah and M. Latva-Aho, “Ultra dense small cell networks: Turning density into energy efficiency,” IEEE Journal on Selected Areas in Communications, vol. 34, no. 5, pp. 1267–1280, 2016. [Google Scholar]
6. Y. Zeng, R. Zhang and T. J. Lim, “Wireless communications with unmanned aerial vehicles: Opportunities and challenges,” IEEE Communications Magazine, vol. 54, no. 5, pp. 36–42, 2016. [Google Scholar]
7. R. Alroobaea, R. Arul, S. Rubaiee, F. S. Alharithi, U. Tariq et al., “AI-Assisted bio-inspired algorithm for secure IoT communication networks,” Cluster Computing, vol. 25, no. 3, pp. 1805–1816, 2022. [Google Scholar]
8. F. Yang, J. Song, W. Xiong and X. Cui, “UAV-Based collaborative electronic reconnaissance network for 6G,” Wireless Communications and Mobile Computing, vol. 2021, Article ID 5827665, pp. 7, 2021. https://doi.org/10.1155/2021/5827665. [Google Scholar]
9. A. Anwar, I. U. Haq, I. A. Mian, F. Shah, R. Alroobaea et al., “Applying real-time dynamic scaffolding techniques during tutoring sessions using intelligent tutoring systems,” Mobile Information Systems, vol. 2022, Article ID 6006467, pp. 9, 2022. https://doi.org/10.1155/2022/6006467. [Google Scholar]
10. H. C. Wang, G. R. Ding, F. F. Gao, J. Chen, J. L. Wang et al., “Power control in UAV-supported ultra dense networks: Communications, caching, and energy transfer,” IEEE Communications Magazine, vol. 56, no. 6, pp. 28–34, 2018. [Google Scholar]
11. J. Niu, R. Alroobaea, A. M. Baqasah and L. Kansal, “Implementation of network information security monitoring system based on adaptive deep detection.” Journal of Intelligent Systems, vol. 31, no. 1, pp. 454–465, 2022. [Google Scholar]
12. H. Yu and Y. B. Zikria, “Cognitive radio networks for internet of things and wireless sensor networks,” Sensors, vol. 20, no. 18, pp. 5288 2020. [Google Scholar]
13. C. Lee, G. Jang, N. -N. Dao, D. S. Lakew, C. Lee et al., “Competitive game theoretic clustering-based multiple UAV-assisted NB-IoT systems,” Electronics, vol. 10, no. 3, pp. 356, 2021. [Google Scholar]
14. A. Majeed, R. Bhana and S. Parvez, “Retracted: Controlling energy consumption by internet of things (IoT) applications,” Journal of Fundamental and Applied Sciences, vol. 10, no. 4S, pp. 608–611, 2018. [Google Scholar]
15. S. Y. R. Hui, W. X. Zhong and C. K. Lee, “A critical review of recent progress in mid-range wireless power transfer,” IEEE Transactions on Power Electronics, vol. 29, no. 9, pp. 4500–4511, 2014. [Google Scholar]
16. Z. Zhang, H. L. Pang, A. Georgiadis and C. Cecati, “Wireless power transfer-an overview,”, IEEE Transactions on Industrial Electronics, vol. 66, no. 2, pp. 1044–1058, 2019. [Google Scholar]
17. S. Y. Lien, K. C. Chen and Y. H. Lin, “Toward ubiquitous massive accesses in 3GPP machine-to-machine communications,” IEEE Communications Magazine, vol. 49, no. 4, pp. 66–74, 2011. [Google Scholar]
18. B. Liu, H. Xu and X. Zhou, “Resource allocation in unmanned aerial vehicle (UAV)-assisted wireless-powered internet of things,” Sensors, vol. 19, no. 8, pp. 1908, 2019. [Google Scholar]
19. F. Mukhlif, J. O. Hodonu-Wusu, K. A. Bin Noordin and Z. M. Kasirun, “Major trends in device to device communications research: A bibliometric analysis,” in 2018 IEEE Student Conf. on Research and Development (SCOReD), Malaysia, pp. 1–6, 2018. [Google Scholar]
20. R. I. Bor-Yaliniz, A. El-Keyi and H. Yanikomeroglu, “Efficient 3-D placement of an aerial base station in next generation cellular networks,” in 2016 IEEE Int. Conf. on Communications, New York, pp. 985–989, 2016. [Google Scholar]
21. A. Al-Hourani, S. Kandeepan and A. Jamalipour, “Modeling air-to-ground path loss for low altitude platforms in urban environments,” in 2014 IEEE Global Communications Conf., New York, pp. 2898–2904, 2014. [Google Scholar]
22. M. Mozaffari, W. Saad, M. Bennis and M. Debbah, “Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage,” IEEE Communications Letters, vol. 20, no. 8, pp. 1647–1650, 2016. [Google Scholar]
23. A. Al-Hourani, S. Kandeepan and S. Lardner, “Optimal LAP altitude for maximum coverage,” IEEE Wireless Communications Letters, vol. 3, no. 6, pp. 569–572, 2014. [Google Scholar]
24. J. Xu, Y. Zeng and R. Zhang, “UAV-Enabled wireless power transfer: Trajectory design and energy optimization,” IEEE Transactions on Wireless Communications, vol. 17, no. 8, pp. 5092–5106, 2018. [Google Scholar]
25. L. D. Nguyen, A. Kortun and T. Q. Duong, “An introduction of real-time embedded optimisation programming for UAV systems under disaster communication,” EAI Endorsed Transactions on Industrial Networks and Intelligent Systems, vol. 5, no. 17, pp. e5, 2018. [Google Scholar]
26. F. Mukhlif, K. A. Bin Noordin and O. B. Abdulghafoor, “Energy harvesting technique for efficient wireless cognitive sensor networks based on SWIPT game theory,” KSII Transactions on Internet and Information Systems (TIIS), vol. 14, no. 6, pp. 2709–2734, 2020. [Google Scholar]
27. F. Mukhlif, N. Ithnin, O. B. Abdulghafoor, F. Alotaibi and N. S. Alotaibi, “Game theory-based IoT efficient power control in cognitive UAV,” CMC-Computers, Matrials and Continua, vol. 72, no. 1, pp. 1561–1578, 2022. [Google Scholar]
28. F. Mukhlif, K. A. Bin Noordin, O. B. Abdulghafoor and T. Izam, “Green communication for cognitive radio networks based on game and utility-pricing theories,” Plos One, vol. 15, no. 8, pp. 21, 2020. [Google Scholar]
29. D. Goodman and N. Mandayam, “Power control for wireless data,” IEEE Personal Communications, vol. 7, no. 2, pp. 48–54, 2000. [Google Scholar]
30. Y. A. Al-Gumaei, K. A. Noordin, A. W. Reza and K. Dimyati, “A novel utility function for energy-efficient power control game in cognitive radio networks,” Plos One, vol. 10, no. 8, p. e0135137, 2015. [Google Scholar]
31. X. Z. Xie, H. L. Yang, A. V. Vasilakos and L. He, “Fair power control using game theory with pricing scheme in cognitive radio networks,” Journal of Communications and Networks, vol. 16, no. 2, pp. 183–192, 2014. [Google Scholar]
32. Y. H. Kuo, J. H. Yang and J. Chen, “Efficient swarm intelligent algorithm for power control game in cognitive radio networks,” Iet Communications, vol. 7, no. 11, pp. 1089–1098, 2013. [Google Scholar]
33. X. D. Zhang, Y. F. Zhang, Y. H. Shi, L. Zhao and C. R. Zou, “Power control algorithm in cognitive radio system based on modified shuffled frog leaping algorithm,” AEU-International Journal of Electronics and Communications, vol. 66, no. 6, pp. 448–454, 2012. [Google Scholar]
34. J. O. Neel, J. H. Reed and R. P. Gilles, “Convergence of cognitive radio networks,” in 2004 IEEE Wireless Communications and Networking Conf. (IEEE Cat. No. 04TH8733), Atlanta, GA, USA, vol. 4, pp. 2250–2255, 2004. [Google Scholar]
35. C. U. Saraydar, N. B. Mandayam and D. J. Goodman, “Efficient power control via pricing in wireless data networks,” IEEE Transactions on Communications, vol. 50, no. 2, pp. 291–303, 2002. [Google Scholar]
36. J. S. Pang, G. Scutari, D. P. Palomar and F. Facchinei, “Design of cognitive radio systems under temperature-interference constraints: A variational inequality approach,” IEEE Transactions on Signal Processing, vol. 58, no. 6, pp. 3251–3271, 2010. [Google Scholar]
37. R. D. Yates, “A framework for uplink power-control in cellular radio systems,” IEEE Journal on Selected Areas in Communications, vol. 13, no. 7, pp. 1341–1347, 1995. [Google Scholar]
38. S. Koskie and Z. Gajic, “A nash game algorithm for SIR-based power control in 3G wireless CDMA networks,” IEEE ACM Transactions on Networking, vol. 13, no. 5, pp. 1017–1026, 2005. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools