
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Adapted Speed System in a Road Bend Situation in VANET Environment
1 EST Essaouira, Cadi Ayad University, Essaouira, 44000, Morocco
2 Department of Computer Science, COMSATS University Islamabad, Islamabad, 45550, Pakistan
3 Industrial Engineering Department, College of Engineering, King Saud University, P.O. Box 800, Riyadh, 11421, Saudi Arabia
4 Department of Information Technology, University of the Punjab Gujranwala Campus, Gujranwala, 52250, Pakistan
5 Department of Information and Communication Engineering, Yeungnam University, Gyeongsan, 38541, Korea
* Corresponding Author: Muhammad Shafiq. Email:
Computers, Materials & Continua 2023, 74(2), 3781-3794. https://doi.org/10.32604/cmc.2023.033119
Received 08 June 2022; Accepted 09 August 2022; Issue published 31 October 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Today, road safety remains a serious concern for governments around the world. In fact, approximately 1.35 million people die and 2–50 million are injured on public roads worldwide each year. Straight bends in road traffic are the main cause of many road accidents, and excessive and inappropriate speed in this very critical area can cause drivers to lose their vehicle stability. For these reasons, new solutions must be considered to stop this disaster and save lives. Therefore, it is necessary to study this topic very carefully and use new technologies such as Vehicle Ad Hoc Networks (VANET), Internet of Things (IoT), Multi-Agent Systems (MAS) and Embedded Systems to create a new system to serve the purpose. Therefore, the efficient and intelligent operation of the VANET network can avoid such problems as it provides drivers with the necessary real-time traffic data. Thus, drivers are able to drive their vehicles under correct and realistic conditions. In this document, we propose a speed adaptation scheme for winding road situations. Our proposed scheme is based on MAS technology, the main goal of which is to provide drivers with the information they need to calculate the speed limit they must not exceed in order to maintain balance in dangerous areas, especially in curves. The proposed scheme provides flexibility, adaptability, and maintainability for traffic information, taking into account the state of infrastructure and metering conditions of the road, as well as the characteristics and behavior of vehicles.Keywords
Traffic safety is one of the most concerned issues around the world. As a result, statistics show that more than 1.25 million people die on public roads every year worldwide, and more than 3,500 people die every year in Morocco. Loss of vehicle control is one of the leading causes of accidents (1/3 of the fatalities), the risk of accidents in curves is 5 to 10 times higher than on straights, and 40% of fatal accidents occur on curves. The most important inseparable and interdependent elements of road transport are: drivers, vehicles and infrastructure. Any analysis of road safety levels requires an understanding of the basic system of these three factors. In fact; failure of at least one of these factors could lead to an accident. The effective use of new technologies can reduce the number of road accidents, regardless of their cause. Among these technologies we find: Vehicle Networks and Multi-Agent Systems.
Vehicle Ad Hoc Network (VANET) is abbreviated as a Characteristic Mobile Ad hoc Network (MANET) in which the mobile element consists of an intelligent vehicle and an embedded computer called an on-board unit (OBU), network adapters, and sensor devices. With other ad hoc Network-like, these cars are able to interact with each other (e.g., by exchanging traffic data) or with base stations called roadside units (RSUs) that can be located anywhere along the road (e.g., searching for information or accessing other networks) [1]. As shown in Fig. 1, the VANET architecture is based on vehicle-to-vehicle (V-to-V) and vehicle-to-infrastructure (V-to-I) communication systems for data exchange between OBU and RSU-vehicle or remote network components (e.g., traffic lights, traffic lights) [2].
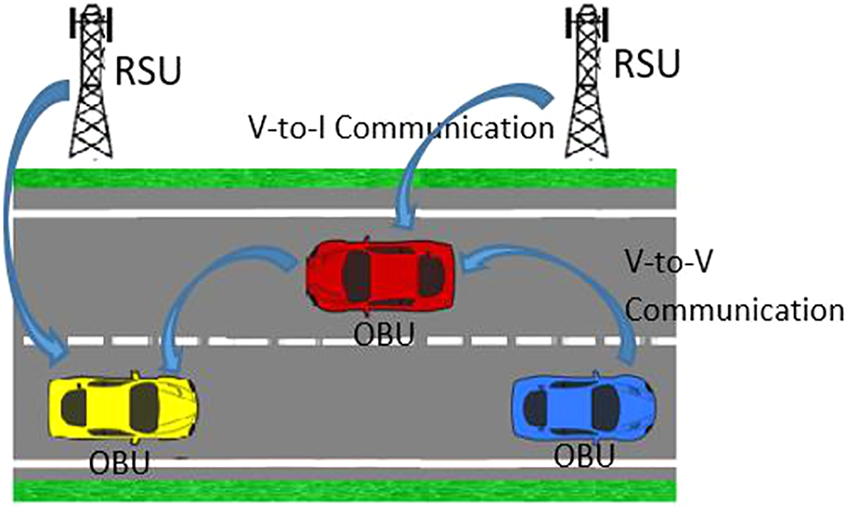
Figure 1: Architecture of vehicular ad hoc network [2]
The main uses of VANET networks can be divided into three categories [3]. The application of prevention and road safety becomes necessary, especially with the increase in the number of accidents related to the large number of vehicles used by citizens and road conditions. VANET can avoid accidents and activities on the road, identify moving or fixed obstacles, and disseminate weather conditions by sending alerts. Traffic optimization and driver assistance applications can significantly improve traffic conditions by collecting and sharing data from cars. For example, moving vehicles can be warned of abnormal braking situations (traffic jams, congestion, rockfalls, or construction sites) [4]. In driver and passenger comfort applications, vehicle connectivity can improve driver and passenger comfort. An example is access to the internet, email, car-to-car chat, etc. Passengers in the car can participate in connected games, download MP3 files, send maps to friends, and access other services [5].
In this paper, we are interested in proposing a scheme based on VANET network and multi-agent system communication that enables intelligent management of winding roads, making road traffic more flexible and efficient in this complex place, thereby avoiding huge accident caused by traffic accident. Vehicle overturns and skids. This is achieved by providing the driver with the necessary information to calculate the speed limit that should not be exceeded in order to balance on the bends.
The rest of the current work is structured as follows. Section 2 describes related work. Section 3 provides brief definitions of agents and multi-agent systems. Section 4 presents vehicle dynamics studies on curvy roads. In Section 5, our proposed scheme is described. Section 6 presents the simulations and results. We then present our conclusions in the last section.
In order to improve the stability of the vehicle and reduce the number of accidents caused by loss of control when cornering, several studies have been carried out and several models have been proposed to determine the speed limit based on road conditions, such as in the case of corves.
Gallen et al. [6] proposed a new method to calculate the recommended speed for use by Intelligent Speed Adaptation (ISA) or Advanced Driver Assistance Systems (ADAS) to control the speed limit. From the measured road characteristics, the correct speed trajectory can be determined during hard braking. This approach can handle a variety of adverse conditions that alter friction and visibility, including rain, fog, or both. The proposed method is flexible and can be applied to specific situations, such as nighttime driving. It also applies to the number of countries, networks, drivers and vehicles using the relevant statistics.
Since safety performance indicators (SPIs) are indicators that reflect the technical characteristics of road transport systems, the authors in [7] propose a new study aimed at developing relevant safety performance indicators that not only have a solid theoretical foundation, but also can also be applied. EU in the short term, as relevant data will be available immediately in the future. The SafetyNet Committee works closely with representatives from all 27 countries, as well as Norway and Switzerland. Delegates provided data from their countries and feedback on research findings.
In [8], the authors present their paper that summarizes the curvature data of the Bézier curve to estimate the maximum possible speed on a highway, and uses a check between heuristics and the Bézier method to find the maximum allowed speed. In addition, Montella et al. [9] reported driver behavior while cornering on a rural dual carriageway based on various enhanced hazard warning signs, perception measurements, and boundary processing. The implemented application is designed to warn the driver about the curve, encourage a reduction in the speed approaching the curve and influence the speed at which the driver enters the curve. Compared with the horizontal rumble strips, the perceptual processing, painted horizontal strips, dragon teeth pattern, and painted Center Island all show obvious deceleration effects.
The authors in [10] introduced a nested clustering method to group curves to extract driving patterns. Road type, speed limit and driving style seem to be the most important factors in generating this driving pattern. Furthermore, road characteristics appear to have a greater impact on driving behavior than driving style. The authors claim that the clustering method is not yet optimal and further improvements are needed to adequately describe drivers traveling on different types of roads. On the other hand, Chu et al. [11] proposed an improved cornering speed model that takes into account driving patterns, vehicle and road conditions. In this work, the authors introduce driver behavioral factors based on vehicle-road interaction patterns, including the quantification of driving strategies for turning speed options. They used a comprehensive fuzzy rating method to classify the driving styles of 30 professional drivers into three different types (cautious, moderate, and aggressive). The classification results using fuzzy comprehensive evaluation are compared and checked with the K-means clustering method, resulting in a similarity of over 60%. Furthermore, the proposed curvilinear velocity model is constructed and then compared with four existing models.
Our contribution lies in the use of vehicle models by applying dynamical rules in an intelligent environment that allows communication through active agents (vehicle and RSU) to better utilize the VANET network to immediately exchange information appropriate to driving conditions to allow.
3 Agents and Multi-Agents System
An agent system is itself a concrete or well-defined structure capable of responding to and collecting data about itself and one of its environments, and can easily communicate with other agents. Furthermore, its actions are the result of its knowledge and cooperation with other players. Each participant has its own resources and capabilities [12]. Furthermore, a multi-agent system consists of a set of independent agents that operate in a shared location in a cooperative, competitive, and even conflicting manner to achieve an overall goal. Such agents form a complex system containing what can be called collective comprehensibility [13]. Therefore, each agent in a multi-agent structure has many key characteristics, including independence, local view, and decentralization.
Multi-agent systems (MAS) are capable of exhibiting self-management, self-leadership, and other control-oriented behaviors. These systems are also capable of correlating complex behavioral patterns, although the individual policies of each agent are fairly simple. MAS tend to find the best solution for their task on their own without intervention. This is very similar to physical phenomena such as energy minimization, where physical things try to achieve the lowest possible energy in a naturally limited environment [14]. These systems also tend to avoid failure propagation, automatic recovery, and fault tolerance [15]. The MAS is used worldwide for real-time graphics applications, including video games. A proxy system is used for thin films. They have found use in decentralized defense systems. Some other applications [16–19] are in transportation, logistics, computer graphics and geographic information systems. They are widely supported in networked and wireless environments to provide automated and dynamically shared workloads, higher scale, and resilient networks with self-healing capabilities. MAS is also used in machine learning to reduce the complexity of problem solving by dividing the required information into subsets, assigning autonomous intelligent agents to each subset, and coordinating the activities of these agents. Hence it is called artificial distributed intelligence [20–22].
To study vehicle dynamics and its behavior, several models have been proposed in the literature. These models can be as simple as bicycle models [23] or as complex but more realistic as four-wheel models [24,25].
We consider the following parameters (Fig. 2a):
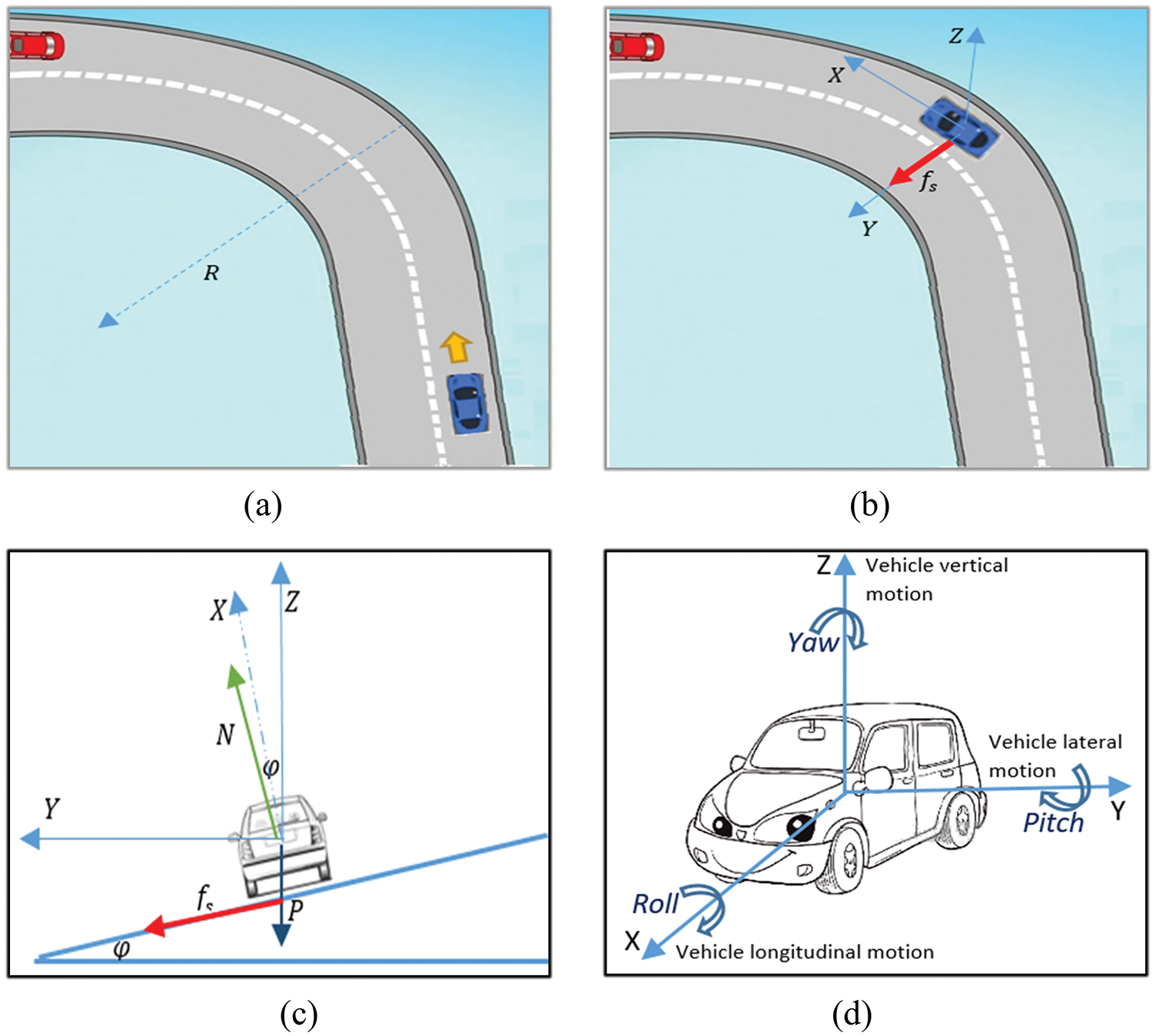
Figure 2: Dynamics of vehicle in bend: (a) R radius of bend; (b) Mark (X, Y, Z) linked to the vehicle; (c) Forces applied to the vehicle; (d) Different vehicle movements
R = Bend radius
V = Constant speed of the vehicle
m = Vehicle weight
g = 9,81 m/s/s
Identification of forces:
N: Normal force
P: Vehicle weight
fs: Static friction
Applying the fundamental principle of dynamics (Newton’s laws) and neglecting the aerodynamic forces, we have Eq. (1).
The projection in the X, Y and Z (Figs. 2b and 2c) directions gives the Eq. (2).
The speed is constant
Following the Y axis (Eq. (4)),
The transverse acceleration is given in Eqs. (5) and (6),
Following the Z axis Eqs. (7) and (8),
We have (Eq. (9)),
Thus, (Eq. (10)),
Since (Eq. (11)),
where
Division Eq. (12) out of Eq. (13) gives (Eqs. (14)–(16)):
Finally, we have Eq. (17),
In case:
In case without recovery:
Bearing angle as a function of speed is expressed in the Eqs. (20)–(23):
When a vehicle takes a bend a fictitious force is created which tends to eject the vehicle towards the outside of the bend, this force is known as “centrifugal force” (Fig. 3), which is calculated by Eq. (24).
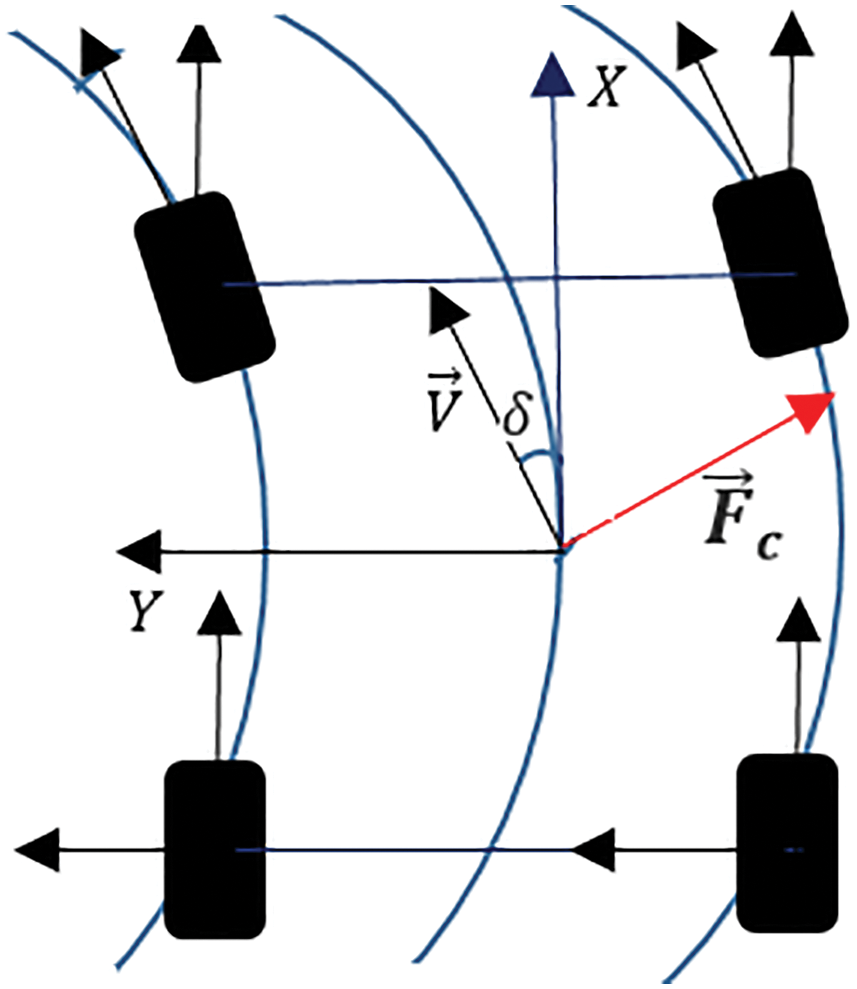
Figure 3: The centrifugal force
In the X direction (Eq. (25)):
In the Y direction (Eq. (26)):
The calculation of the normal of this force gives (Eq. (27)),
Thus, we have (Eq. (28)),
Our proposed model is designed to warn drivers and provide them with the information they need to calculate the maximum vehicle speed to prevent them from entering the VANET environment. To this end, we plan to implement an RSU at the edge of the curve (Fig. 4), which is able to collect and generate the necessary information from vehicles at a sufficient distance through sensors at the end of the transmitter. After receiving the information, with the help of the calculator built into the OBU, each car calculates the limit speed for adapting to the relevant curve in order to stay within the stable area so that the vehicle does not slip.
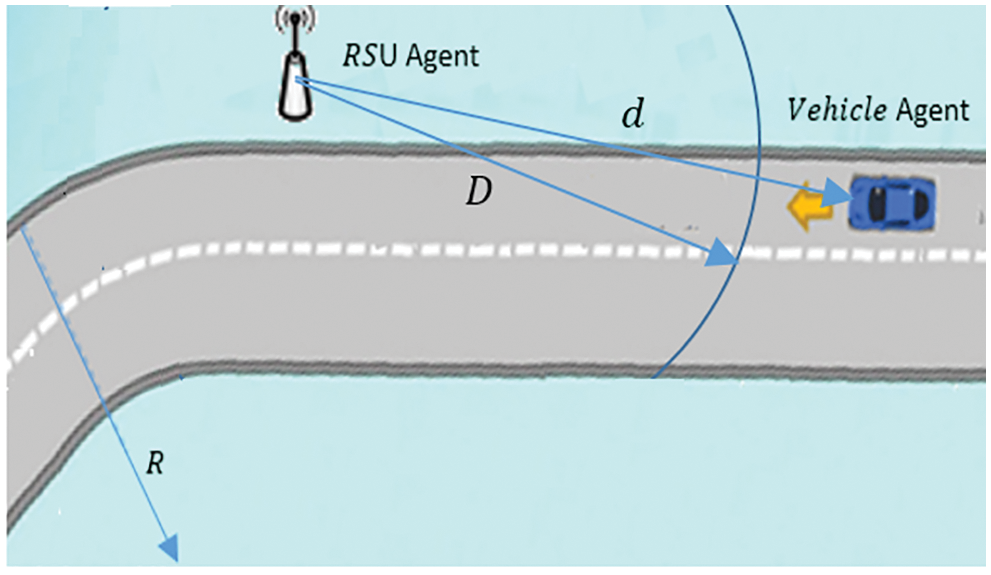
Figure 4: RSU agent and vehicle agent
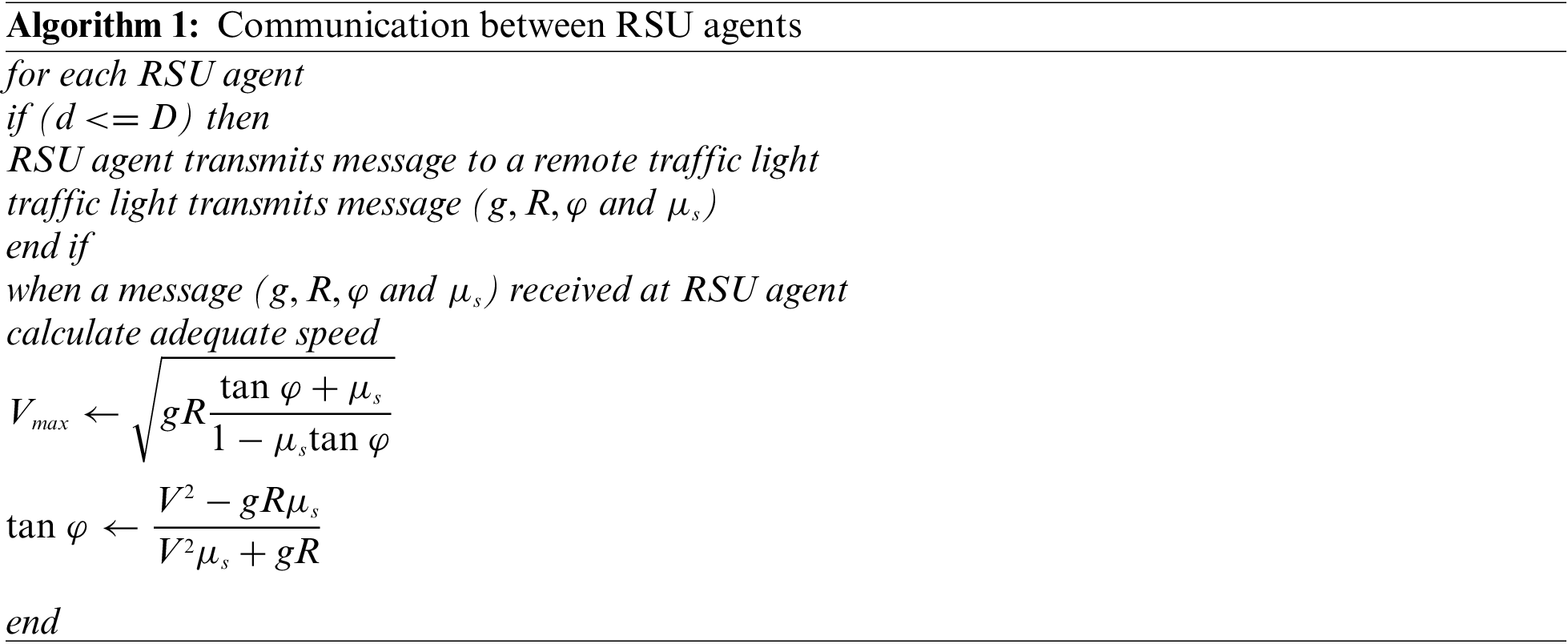
5.1 Algorithm of Communication
An RSU is an active device that sends messages with curve (infrastructure, weather) information in radio wave format. Assuming its transmission radius is D, the communication between these two agents starts according to Algorithm 1 when the vehicle enters its coverage area (d ≤ D).
To validate the proposed method, we implement a Java system based on the Java Agent Development Framework (DF). As shown in Fig. 5, two types of agents are designed, including vehicle/car agent and RSU agent. These agents are executed by the Agent Management System (AMS) and Directory Facilitator (DF) for naming and paging services respectively.

Figure 5: RSU and vehicle platforms
The topology is a bend road consisting of an RSU and a car. DF-based agents for Java agents exchange messages according to the Agent Communication Language Specification developed by the Foundation for Intelligent Physical Agents (FIPA). Due to the communication between the different agents, the management of this complex place becomes more flexible and intelligent, which can avoid several problems such as an eventual accident.
Using the model and the previous formulas, we obtain the results shown in Figs. 6 and 7.
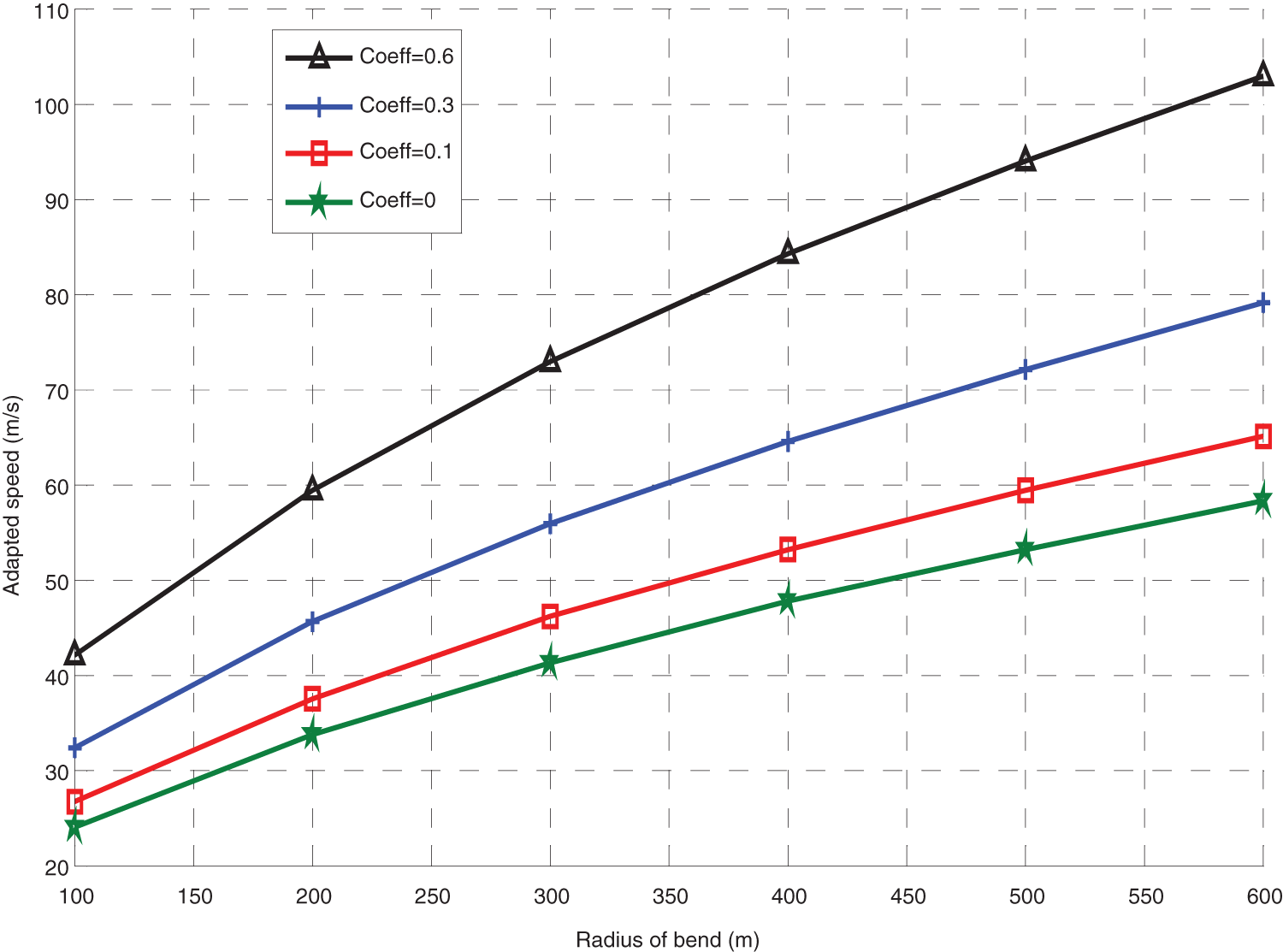
Figure 6: Speed limit according to R and
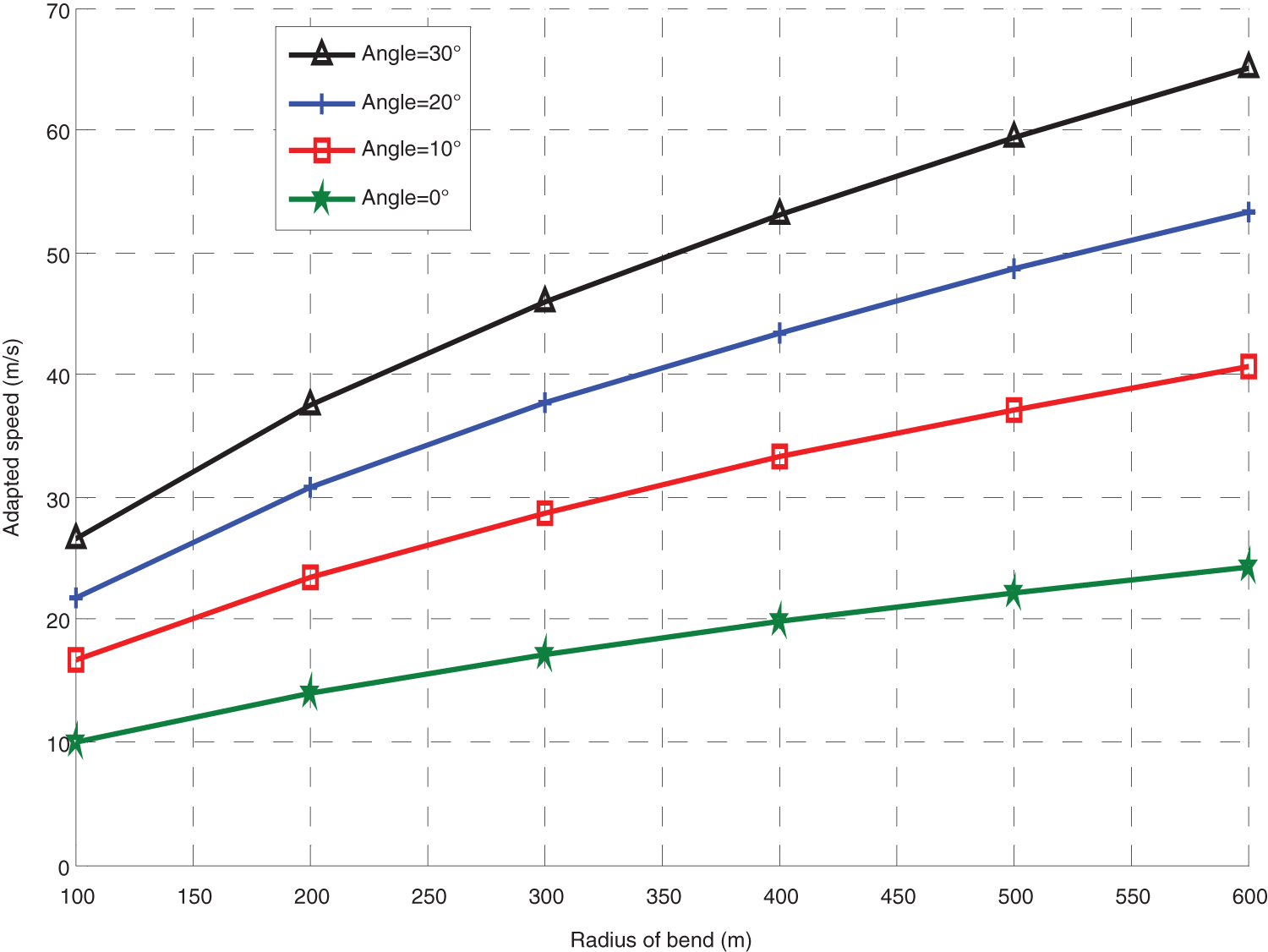
Figure 7: Speed limit according to R and
Fig. 6 shows a set of fitted velocities (limits) as a function of radius of curvature and coefficient of static friction. We find that for a fixed coefficient (e.g.,
Fig. 7 shows the variation of the limiting speed with the radius of curvature by changing the azimuth angle. We found that, as before, as the radius increases, the speed increases, and similarly, as the angle increases, the speed limit increases.
Fig. 8 illustrates the different limit speeds of the vehicle for different values of the bearing angle by varying the coefficient of static friction. As the angle and factor increase, the speed limit increases. Fig. 9 shows the process of centrifugal force, which tends to push the vehicle out of the curve, as a function of angle and coefficient of static friction. We find that as the angle and coefficient increase, the centrifugal force increases, given by Eq. (28), which gives the dependence of force on velocity when two parameters (angle and coefficient) increase according to the Eq. (17).
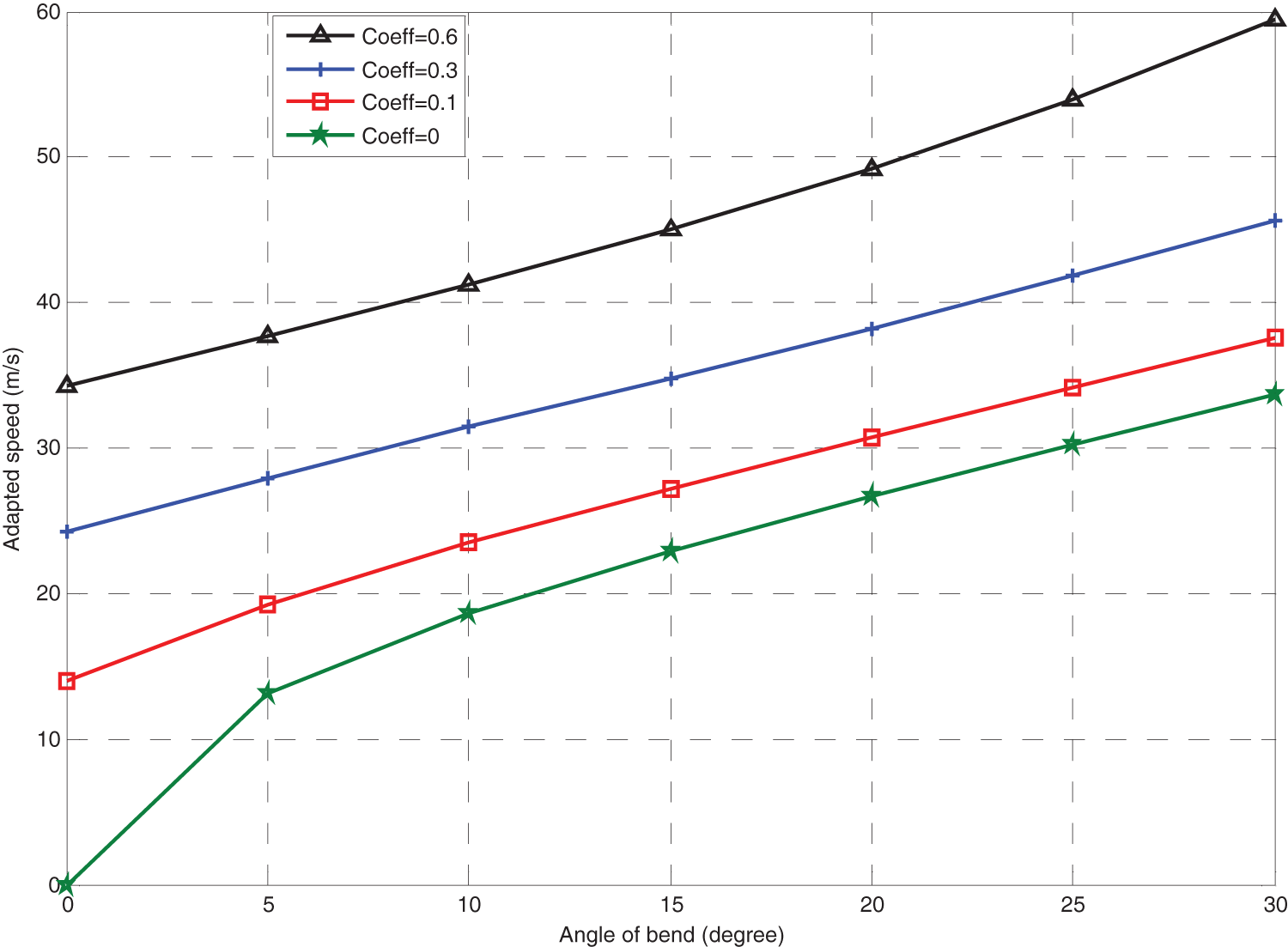
Figure 8: Speed limit according to
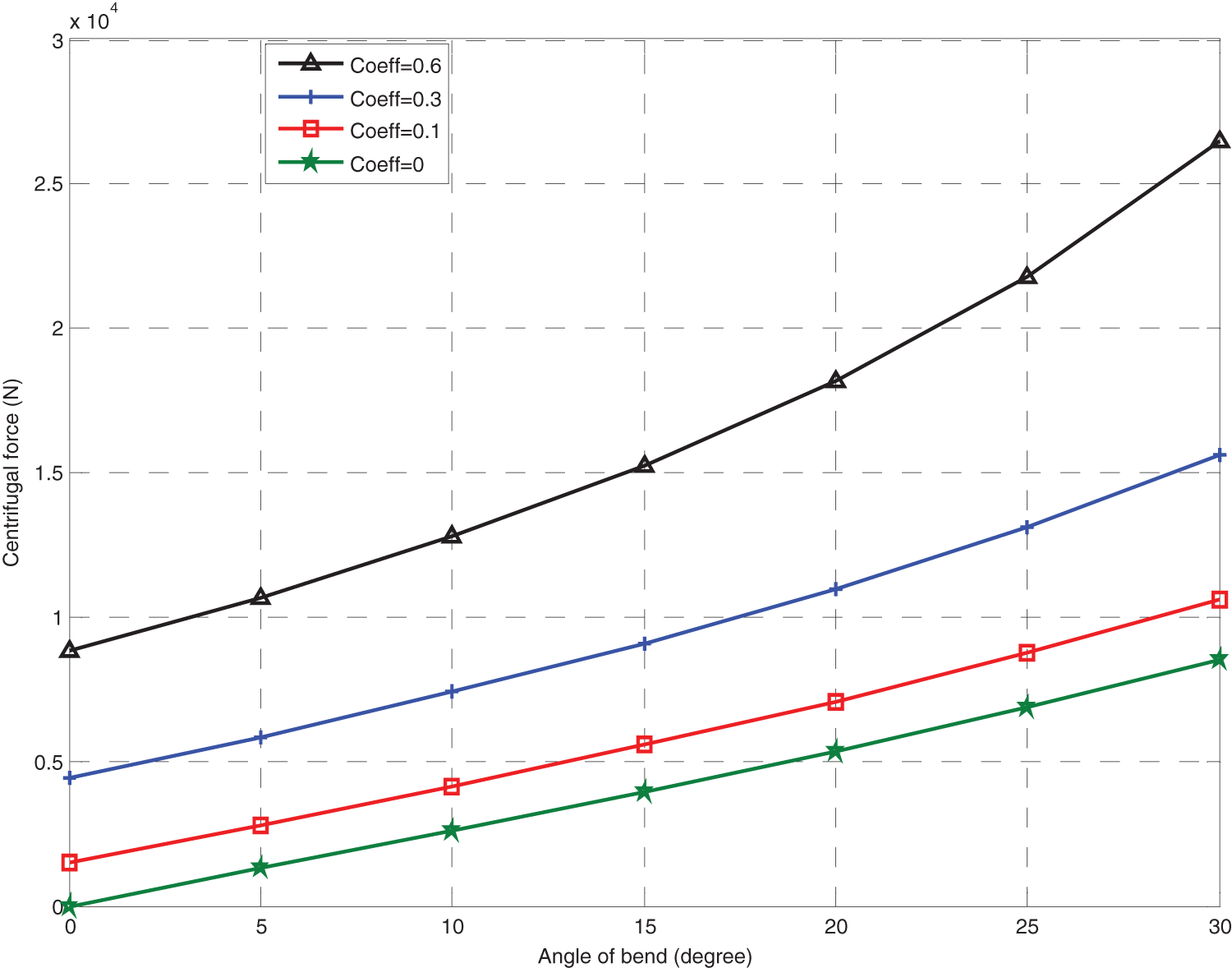
Figure 9: Centrifugal force cording to
Due to the communication between the RSU agent and the vehicle agent, the management of this complex site becomes more flexible and intelligent, which can avoid several problems of eventual accidents such as skidding and vehicle reversing.
In modern times, transportation and roads are essential to all people in the world. Everyone is involved in road traffic in one way or another. In fact, road traffic crashes kill thousands each year and millions suffer severe physical disability. On the other hand, multi-agent systems form the core research field in the field of modern artificial intelligence. Multi-agent systems consist of multiple interacting intelligent agents working together in a distributed environment to achieve common or overlapping goals. Various different types of application uses can be handled using the MAS method, such as: B. Automated vehicle operations, multi-robot factories, distributed transactions, automated games, distributed teaching, etc. The proposed framework provides drivers with predictions about the speed limit they must not exceed. The purpose of the proposal is to ensure that the vehicle remains within the stability range in cornering situations. Our proposed model is based on information exchange in a multi-agent system, exploiting the fundamentals of dynamics in a vehicle network environment. In contrast to what currently exists (fixed speed), our model can provide variable speed based on the meteorological conditions of the infrastructure and curves, avoiding several accidents in this critical area. Finally, in future work, we plan to use machine learning and deep learning methods to protect messages exchanged between agents (vehicle and RSU) from possible attacks.
Acknowledgement: The authors extend their appreciation to King Saud University for funding this work through Researchers Supporting Project number (RSP-2021/387), King Saud University, Riyadh, Saudi Arabia.
Funding Statement: This work was supported by King Saud University through Researchers Supporting Project number (RSP-2021/387), King Saud University, Riyadh, Saudi Arabia.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. K. C. Dey, A. Rayamajhi, M. Chowdhury, P. Bhavsar and J. Martin, “Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network-performance evaluation,” Transportation Research Part C: Emerging Technologies, vol. 68, no. 1, pp. 168–184, 2016. [Google Scholar]
2. S. Benkirane and A. Jadir, “Adapted speed mechanism for collision avoidance in vehicular ad hoc networks environment,” International Journal of Advanced Computer Science & Applications, vol. 9, no. 10, pp. 315–319, 2018. [Google Scholar]
3. P. Pereira, A. Casaca, J. Rodrigues, V. Soares, J. Triay et al., “From delay-tolerant networks to vehicular delay-tolerant networks,” IEEE Communications Surveys & Tutorials, vol. 14, no. 4, pp. 1166–1182, 2012. [Google Scholar]
4. S. Al-Sultan, M. M. Al-Doori, A. H. Al-Bayatti and H. Zedan, “A comprehensive survey on vehicular ad Hoc network,” Journal of Network & Computer Applications, vol. 37, no. 3, pp. 380–392, 2014. [Google Scholar]
5. H. Hartenstein and K. P. Laberteaux, “A tutorial survey on vehicular ad hoc networks,” IEEE Communications Magazine, vol. 46, no. 6, pp. 164– 171, 2008. [Google Scholar]
6. R. Gallen, N. Hautière, A. Cord and S. Glaser, “Supporting drivers in keeping safe speed in adverse weather conditions by mitigating the risk level,” IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 4, pp. 1558–1571, 2013. [Google Scholar]
7. V. Gitelman, M. Vis, W. Weijermars and S. Hakkert, “Development of road safety performance indicators for the European countries,” Advances in Social Sciences Research Journal, vol. 1, no. 4, pp. 138–158, 2014. [Google Scholar]
8. M. Y. Misro, A. Ramli and J. M. Ali, “Approximating maximum speed on road from curvature information of Bézier curve,” International Journal of Mathematical, Computational, Physical, Electrical & Computer Engineering, vol. 9, no. 12, pp. 705–712, 2015. [Google Scholar]
9. A. Montella, F. Galante, F. Mauriello and L. Pariota, “Low-cost measures for reducing speeds at curves on two-lane rural highways. Transportation Research Record,” Journal of the Transportation Research Board, vol. 2472, no. 1, pp. 142–154, 2015. [Google Scholar]
10. C. Kanter, “Kanter extraction of driving modes for dynamic speed adaptation in curves,” M.S. Dissertation, KTH Royal Institute of Technology, Sweden, 2017. [Google Scholar]
11. D. Chu, Z. Deng, Y. He, C. Wu, C. Sun et al., “Curve speed model for driver assistance based on driving style classification IET Intelligent,” Transport Systems, vol. 11, no. 8, pp. 501–510, 2017. [Google Scholar]
12. A. Julie Adams, “Multiagent systems: A modern approach to distributed artificial intelligence,” AI Magazine, vol. 22, no. 2, pp. 105–108, 2001. [Google Scholar]
13. N. Chopra and M. W. Spong, “Passivity-based control of multi-agent systems,” in Proc. Advances in Robot Control, Heidelberg: Berlin, pp. 107–134, 2006. [Google Scholar]
14. Y. Orcun and K. Geylani, “A multi-agent system for minimizing energy costs in cement production,” Computers in Industry, vol. 65, no. 7, pp. 1076–1084, 2014. [Google Scholar]
15. M. Oprea, Applications of Multi-Agent Systems. 2nd ed., Boston, Dordrecht, London: Kluwer Academic Publishers, pp. 239–270, 2004. [Google Scholar]
16. S. Xiao-Feng, X. Smith and G. Barlow, “Schedule-driven coordination for real-time traffic network control,” in Proc. Int. Conf. on Automated Planning & Scheduling, São Paulo, Brazil, pp. 323–331, 2012. [Google Scholar]
17. T. S. Máhr, J. Srour, M. de Weerdt and R. Zuidwijk, “Can agents measure up? A comparative study of an agent-based and on-line optimization approach for a drayage problem with uncertainty,” Transportation Research Part C: Emerging Technologies, vol. 18, no. 1, pp. 99–119, 2010. [Google Scholar]
18. H. Kim and J. -M. Chung, “VANET jamming and adversarial attack defense for autonomous vehicle safety,” Computers, Materials & Continua, vol. 71, no. 2, pp. 3589–3605, 2022. [Google Scholar]
19. S. Sultan, Q. Javaid, E. Rehman, A. A. Alahmadi, N. Ullah et al., “Incentive-driven approach for misbehavior avoidance in vehicular networks,” Computers, Materials & Continua, vol. 70, no. 3, pp. 6089–6106, 2022. [Google Scholar]
20. S. Ahmad, S. Jha, A. Alam, M. Alharbi and J. Nazeer, “Intelligent DoS attack detection with congestion control technique for VANETs,” Computers, Materials & Continua, vol. 72, no. 1, pp. 141–156, 2022. [Google Scholar]
21. M. A. Shah, F. Z. Khan and G. Abbas, “A robust emergency messages routing scheme for urban VANETs,” Computers, Materials & Continua, vol. 72, no. 2, pp. 2617–2632, 2022. [Google Scholar]
22. A. Rehman, M. F. Hassan, Y. K. Hooi, M. A. Qureshi, D. T. Chung et al., “Context and machine learning based trust management framework for internet of vehicles,” Computers, Materials & Continua, vol. 68, no. 3, pp. 4125–4142, 2021. [Google Scholar]
23. S. Ponomarev and A. Voronkov, “Multi-agent systems and decentralized artificial superintelligence,” arXiv preprint arXiv:1702.08529, 2017. [Google Scholar]
24. M. L. Segel, “Theorical prediction and experimental substantiation of the response of the automobile to steering control,” Automobile Division of the Institute of Mechanical Engineers, vol. 7, no. 1, pp. 310–330, 1956. [Google Scholar]
25. W. J. Yang, P. P. Dong, W. S. Tang, X. P. Lou, H. J. Zhou et al., “A MPTCP scheduler for web transfer,” Computers, Materials & Continua, vol. 57, no. 2, pp. 205–222, 2018. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools