
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Intelligent Aquila Optimization Algorithm-Based Node Localization Scheme for Wireless Sensor Networks
1 Department of Information Technology, KIET Group of Institutions, Delhi, 201206, India
2 Department of Computer Science and Engineering, Indira Gandhi Delhi Technical University for Women, New Delhi, Delhi, 110006, India
3 Department of Computer Science and Engineering, KL University, Vaddeswaram, Andhra Pradesh, 522502, India
4 Department of Electronics & Communication Engineering, Saveetha Engineering College, Chennai, 602105, India
5 Department of Computer Science and Engineering, K. Ramakrishnan College of Engineering, Tiruchirapalli, 621112, India
6 Department of Information Systems, College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, P. O. Box 84428, Riyadh, 11671, Saudi Arabia
7 Department of Computer Science, College of Science & Art at Mahayil, King Khalid University, Muhayel Aseer, 62529, Saudi Arabia
8 Department of Digital Media, Faculty of Computers and Information Technology, Future University in Egypt, New Cairo, 11835, Egypt
* Corresponding Author: Sami Dhahbi. Email:
Computers, Materials & Continua 2023, 74(1), 141-152. https://doi.org/10.32604/cmc.2023.030074
Received 17 March 2022; Accepted 26 April 2022; Issue published 22 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In recent times, wireless sensor network (WSN) finds their suitability in several application areas, ranging from military to commercial ones. Since nodes in WSN are placed arbitrarily in the target field, node localization (NL) becomes essential where the positioning of the nodes can be determined by the aid of anchor nodes. The goal of any NL scheme is to improve the localization accuracy and reduce the localization error rate. With this motivation, this study focuses on the design of Intelligent Aquila Optimization Algorithm Based Node Localization Scheme (IAOAB-NLS) for WSN. The presented IAOAB-NLS model makes use of anchor nodes to determine proper positioning of the nodes. In addition, the IAOAB-NLS model is stimulated by the behaviour of Aquila. The IAOAB-NLS model has the ability to accomplish proper coordinate points of the nodes in the network. For guaranteeing the proficient NL process of the IAOAB-NLS model, widespread experimentation takes place to assure the betterment of the IAOAB-NLS model. The resultant values reported the effectual outcome of the IAOAB-NLS model irrespective of changing parameters in the network.Keywords
Wireless Sensor Network (WSN) can be defined as self-arranged and foundation less networks used to screen physical or ecological circumstances, like temperature, sound, vibration, strain, etc. A sink or base station (BS) behaves like a point of interaction among clients and the organization [1]. The user can recover required data from the organization by infusing inquiries and social occasion results from the sink. Ordinarily, WSN comprises countless sensor nodes (SNs). The SNs can impart among themselves utilizing radio transmissions [2]. For most existing utilization of WSNs, the node localization (NL) is urgent [3]. For instance, in the primary observing application, we can reason that the construction is in a bad way assuming issue is distinguished by at least one sensor in the organization of sensors mounted wherever on the design. In any case, we can’t precisely report the broken situation without localization ability of the WSN. Rather than other sorts of organizations, e.g., Internet, a conspicuous contrast is that WSNs are area based networks. In this manner, the NL tool and localization calculations is a significant methodology in the advancement of a WSN framework [4,5]. The strucutre of WSN is shown in Fig. 1.
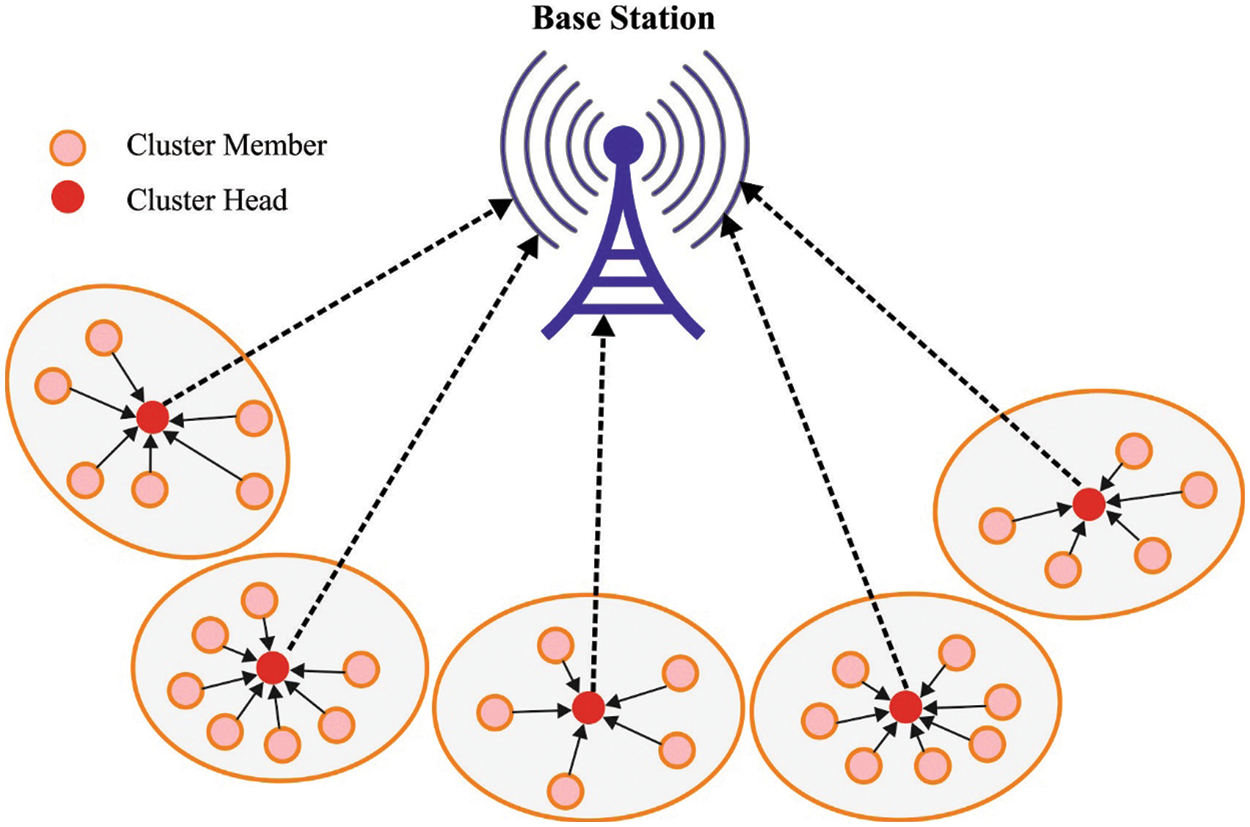
Figure 1: Structure of WSN
Node data might be handled either halfway or in a dispersed way. In concentrated localization, distance estimations are gathered by a focal processor before computation. In appropriated calculations, the sensors share their data just with neighbors yet conceivably iteratively [6]. The two techniques face the significant expense of correspondence, however, by and large, concentrated localization creates more exact area data, though appropriated localization offers greater adaptability and vigor to connect disappointments [7]. NL depends on the estimations of distances between the nodes to be confined and various reference or anchor nodes. Precise area data is significant in practically all genuine utilizations of WSNs. Specifically, localization in a three-layered (3D) space is essential as it yields more precise outcomes. Trilateration and multilateration situating techniques [8] are insightful strategies utilized in two-layered (2D) and three-layered (3D) spaces, individually. These techniques use distance estimations to assess the objective area systematically and experience the ill effects of horrible showing, diminished exactness, and computational intricacy, particularly in the 3D case [9]. All the more explicitly, trilateration is the assessment of node area through distance estimations from three reference nodes with the end goal that the crossing point of three circles is figured, in this manner finding the node [10].
In [11], an enhanced DV-Hop technique dependent upon hop thinning and distance correction was presented. The minimal hop was modified by presenting Received Signal Strength Indication (RSSI) ranging technologies, and the average hop distance was modified by weight average value of hop distance error and evaluated distance errors. Next, the entire enhancement on the place performance of Hop-DV place technique was recognized. In [12], optimized distance range free (ODR) resolves this hop size and after that, a centroid was attained in the minimal far away anchor nodes to unknown nodes. At this point, a minimal probable distance identified as base distance was measured with routing table support. During the final step, the DV-Hop utilizes least square regression for localizing, but ODR exploits linear optimized for comprehending the base distance to localize.
Messous et al. [13] present an enhanced DV-Hop technique in this work. The distance amongst unknown nodes and anchors was evaluated utilizing the RSSI and polynomial approximation. Besides, the presented technique utilizes a recursive computation of localized procedures for improving the accuracy of place estimation. In [14], a new soft computing approach such as Adaptive Plant Propagation Algorithm (APPA) was established for attaining the optimization places of these mobile nodes. These mobile target nodes were heterogeneous and utilized in an anisotropic environment containing an Irregularity (Degree of Irregularity (DOI)) value fixed to 0.01.
This study focuses on the design of Intelligent Aquila Optimization Algorithm Based Node Localization Scheme (IAOAB-NLS) for WSN. The presented IAOAB-NLS model makes use of anchor nodes to determine proper positioning of the nodes. In addition, the IAOAB-NLS model is stimulated by the behaviour of Aquila. The IAOAB-NLS model has the ability to accomplish proper coordinate points of the nodes in the network. For guaranteeing the proficient NL process of the IAOAB-NLS model, widespread experimentation takes place to assure the betterment of the IAOAB-NLS model.
In this study, a novel IAOAB-NLS model has been developed for NL in WSN. The presented IAOAB-NLS model makes use of anchor nodes to determine proper positioning of the nodes. In addition, the IAOAB-NLS model is stimulated by the behaviour of Aquila.
AO is a population-based method, the heightened rule starts by the population of candidate solution (X) as shown in Eq. (1) that is stochastically formed among the upper bounds
whereas
whereas
whereas,
In which
In the next method
Now
Here,
Then,
whereas,
In the third process
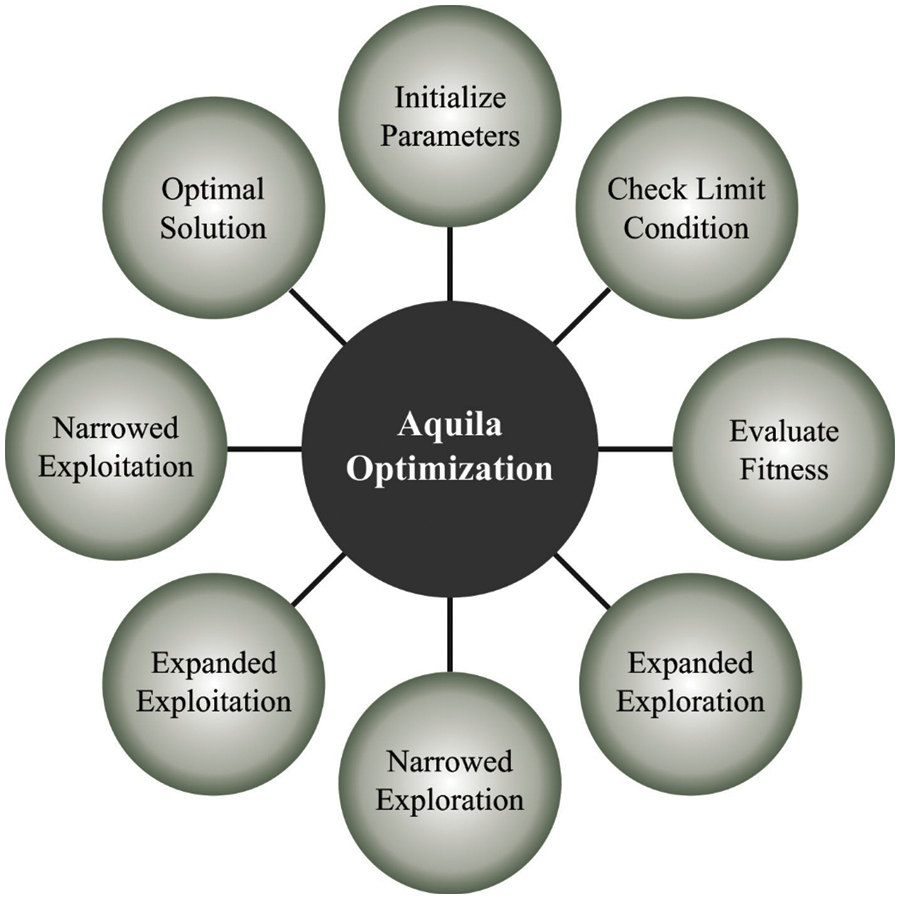
Figure 2: Process involved in AO algorithm [17]
In the fourth method
Here
2.2 Process Involved in IAOAB-NLS Model
The IAOAB-NLS model was executed to estimate the co-ordinate of sensor nodes. An essential purpose of NL in WSN lies in computing the co-ordinate of chosen nodes by minimizing of objective function. IAOAB-NLS model contains the subsequent stages to localize the sensor node from WSN [18]:
• Uploaded
• The distance among the target and ANs were estimated and distinct with additive Gaussian noise. The TN determines the distance as
The parameter
• The desired node was named as localizable node once it contains 3 ANs inside the transmission radius of TN. Next, the reason is dependent upon trilateral positioning model, co-ordinates of 3 ANs
• In event of a localizable node, the IAOAB-NLS model was executed autonomously for recognizing the place of TN. The AO algorithm has been applied to employ the centroid of ANs inside a transmits radius employing the offered function:
In which
• The IAOAB-NLS model was suitable to identify the co-ordinate
whereas
• Once the highest amount of iterations is reached, then the optimum place co-ordination
• The whole localization error was defined then estimating the localize TN
• Steps 2 to 6 obtain repeated still the TNs is localization. The localized method dependent upon the superior error localization
In this section, a widespread examination of the IAOAB-NLS model with recent models [18–20] is carried out under distinct aspects such as AN, transmission error (TE), and ranging error (RE). Tab. 1 and Fig. 3 reports a brief number of localized nodes (NOLN) examination of the IAOAB-NLS model under dissimilar ANs. The experimental outcomes implied that the IAOAB-NLS model has gained maximum NOLN under every AN. For instance, with 10 ANs, the IAOAB-NLS model has offered higher NOLN of 135 whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have obtained lower NOLN of 126, 118, 105, and 99 respectively. Similarly, with 50 ANs, the IAOAB-NLS model has provided increased NOLN of 194 whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained decreased NOLN of 176, 161, 144, and 146 respectively.
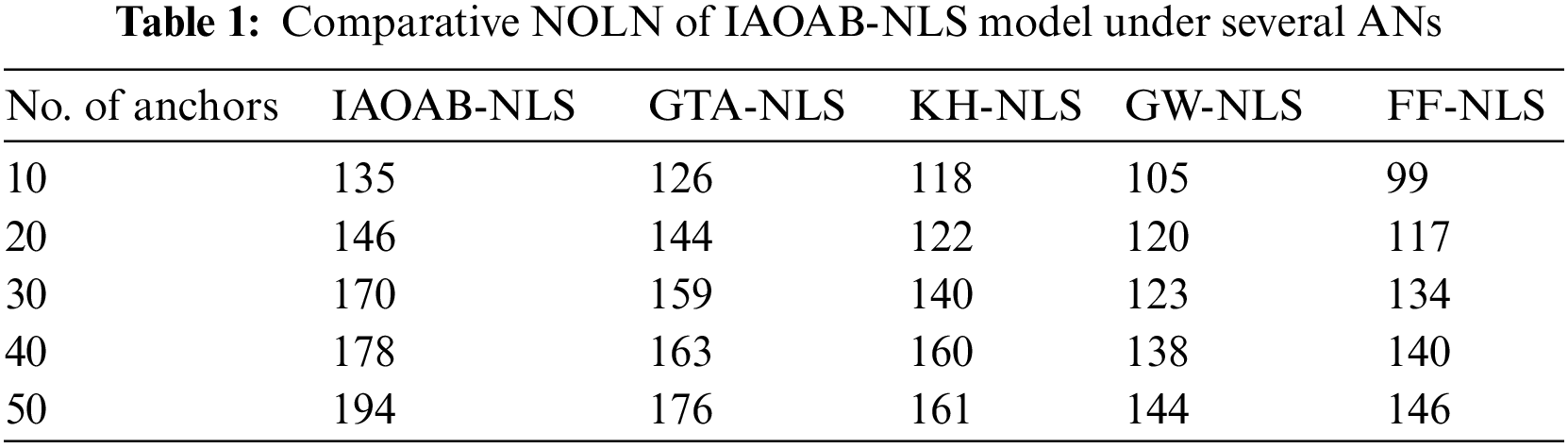
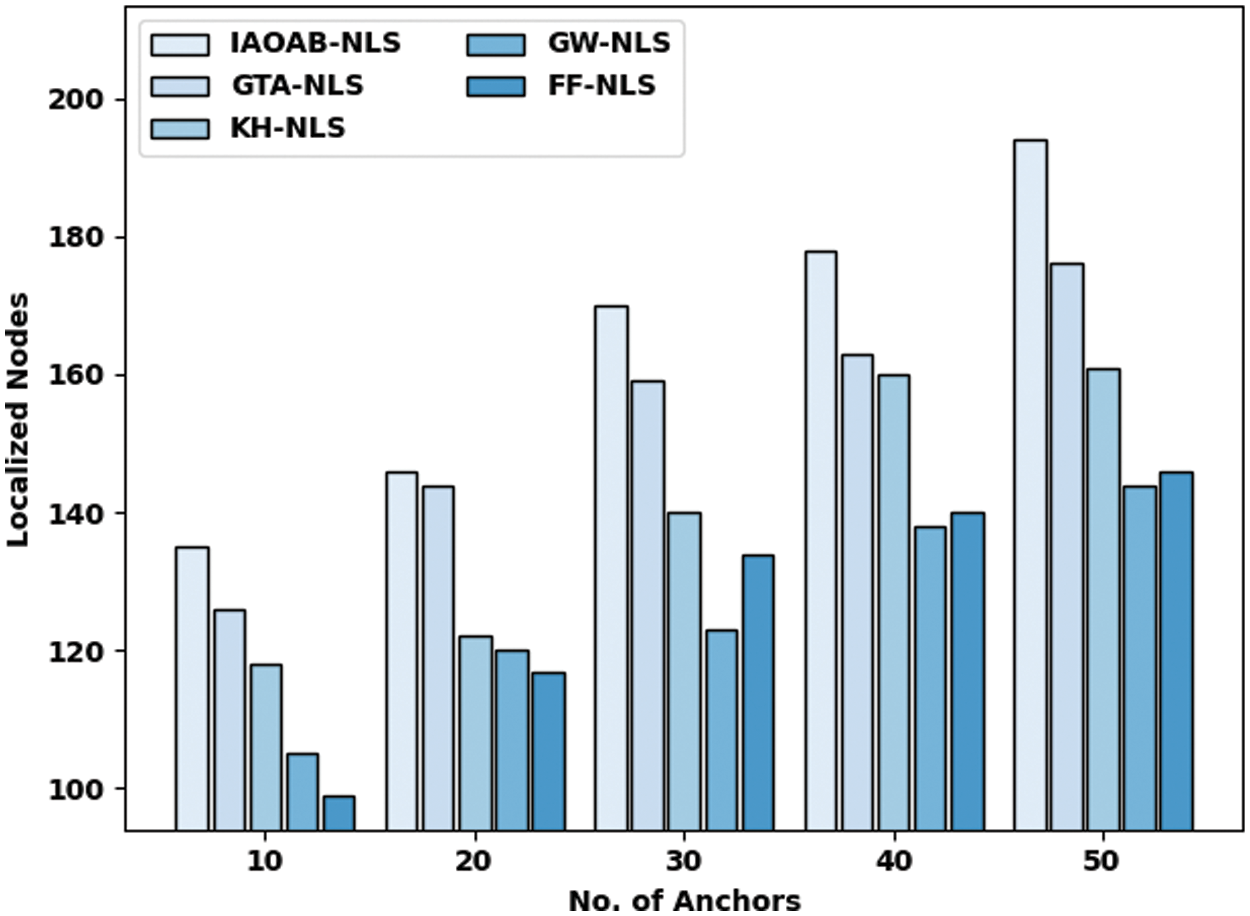
Figure 3: NOLN examination of IAOAB-NLS with recent models
Tab. 2 and Fig. 4 provide a comprehensive localization error (LE) investigation of the IAOAB-NLS model under dissimilar ANs. The experimental outcomes signified that the IAOAB-NLS model has accomplished least LE under every AN. For instance, with 10 ANs, the IAOAB-NLS model has offered reduced LE of 32.50% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gotten increased LE of 37%, 41%, 47.50%, and 50.50% respectively. Likewise, with 50 ANs, the IAOAB-NLS model has provided least LE of 3% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 12%, 19.50%, 28%, and 27% respectively.
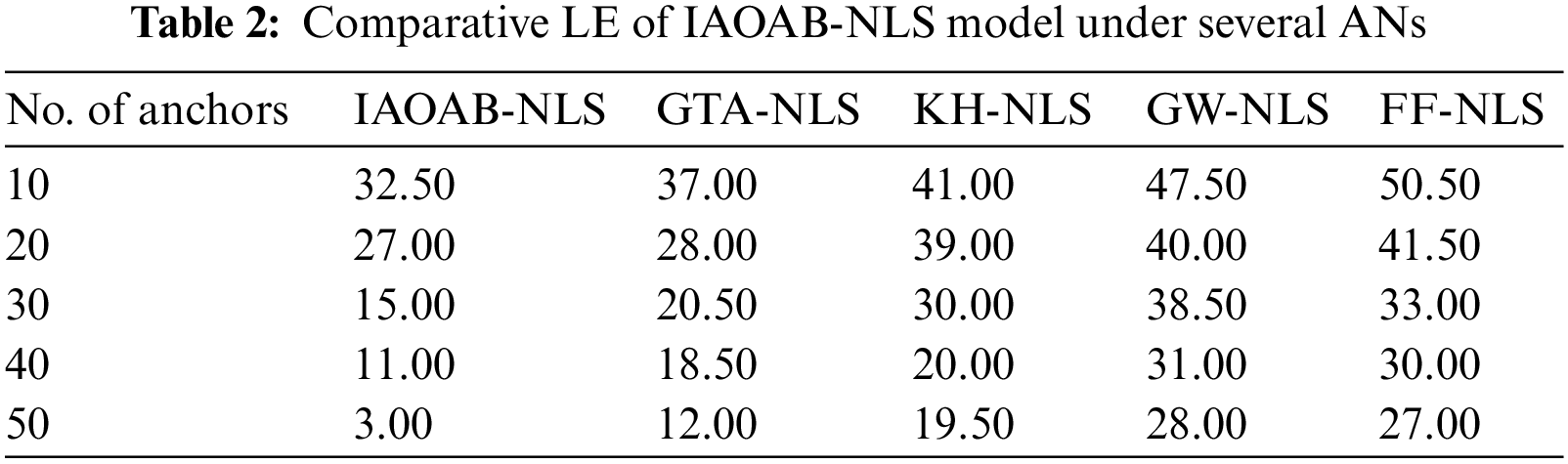
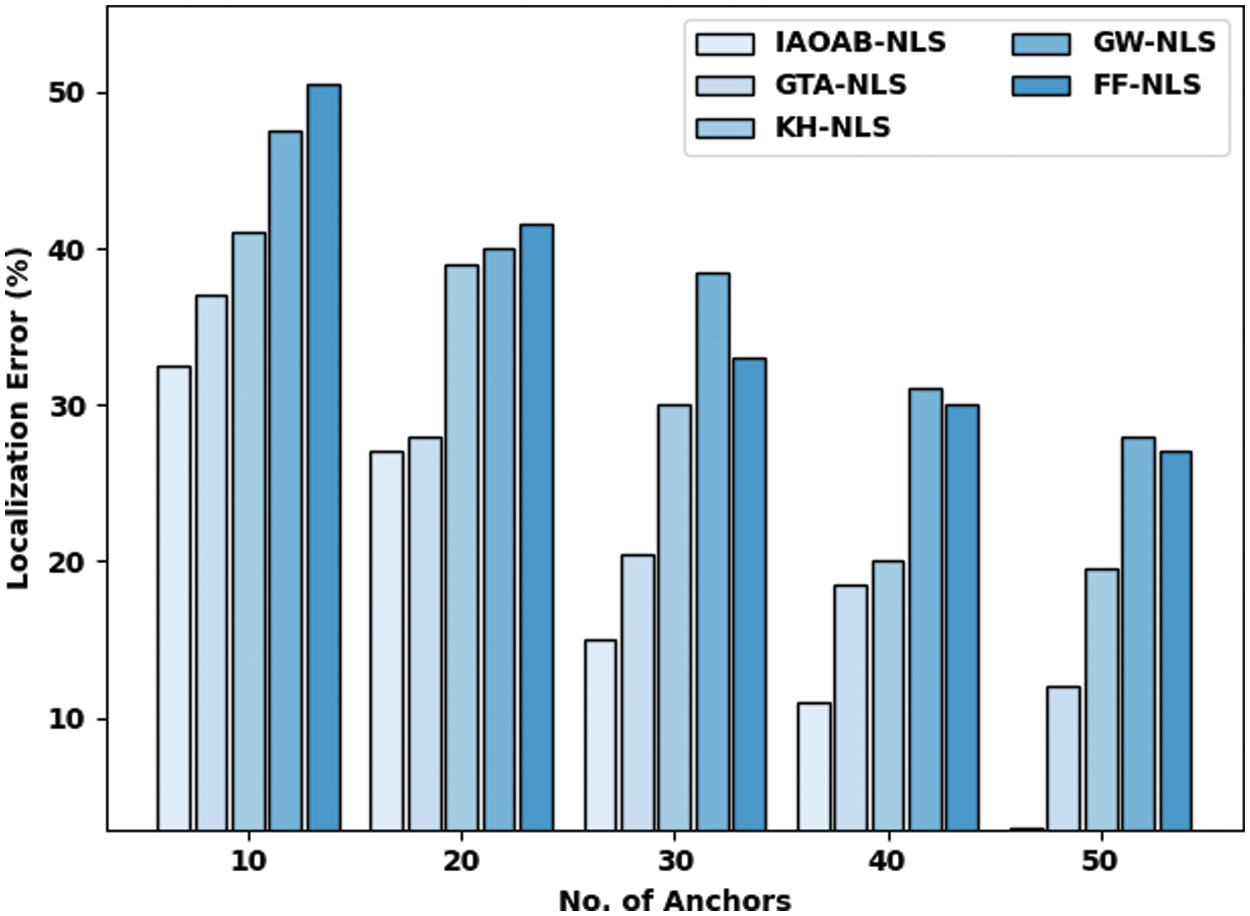
Figure 4: LE examination of IAOAB-NLS with recent models
Tab. 3 and Fig. 5 study a detailed localization rate (LR) inspection of the IAOAB-NLS model under divergent ANs. The investigational outcomes inferred that the IAOAB-NLS model has extended maximum LR under every AN. For instance, with 10 ANs, the IAOAB-NLS model has presented greater LR of 67.50% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have attained lesser NOLN of 63%, 59%, 52.50%, and 49.50% respectively. Likewise, with 50 ANs, the IAOAB-NLS model has provided increased NOLN of 97% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained decreased NOLN of 88%, 80.50%, 72%, and 73% respectively.
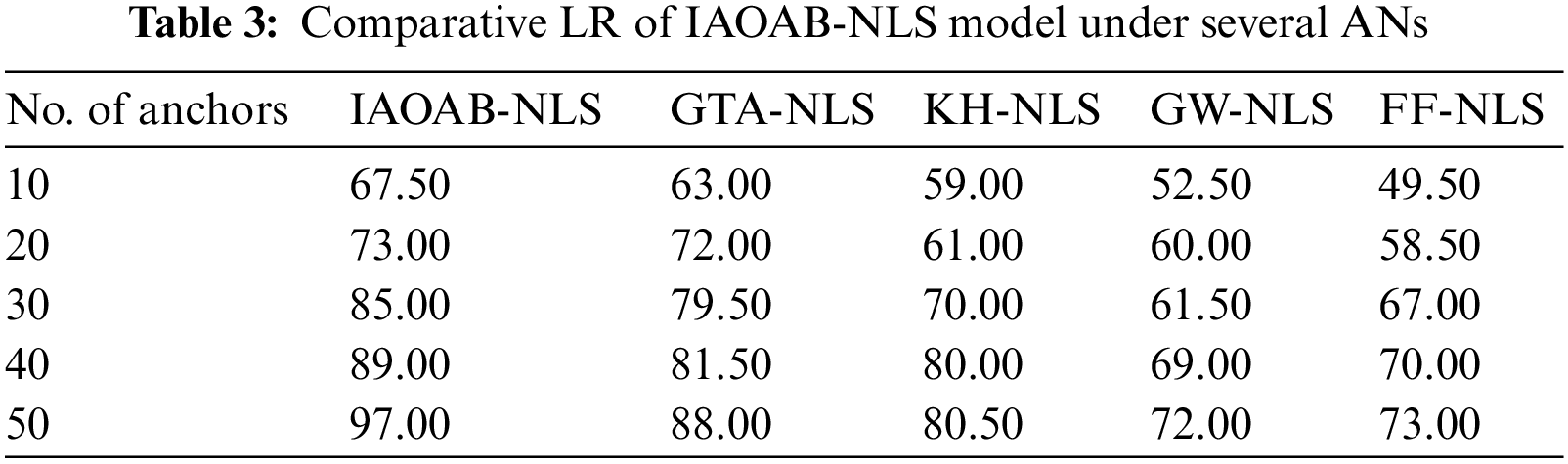
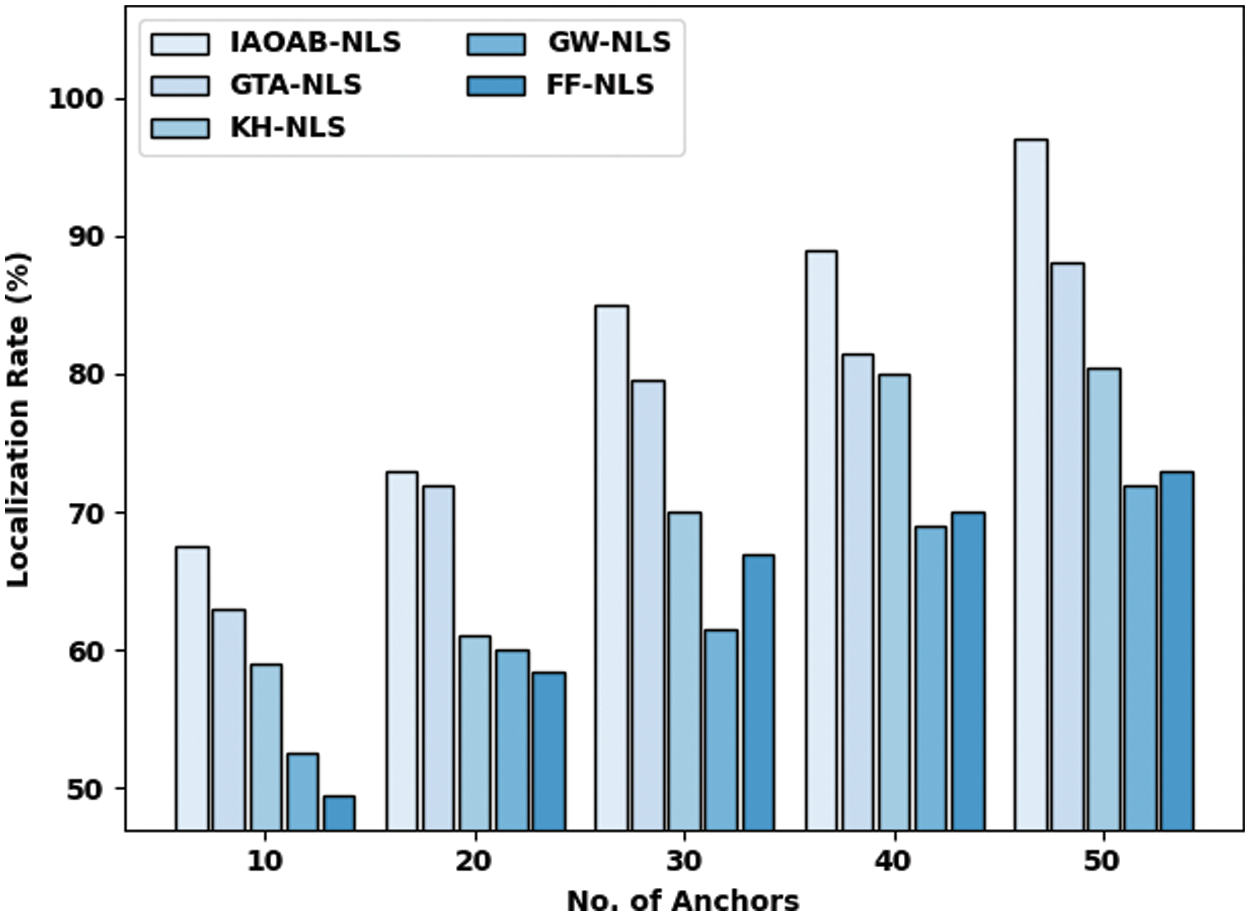
Figure 5: LR examination of IAOAB-NLS with recent models
Tab. 4 and Fig. 6 offer an inclusive LE exploration of the IAOAB-NLS model under dissimilar RE. The experimental outcomes implied that the IAOAB-NLS model has gifted least LE under every AN. For instance, with 5% of REs, the IAOAB-NLS model has offered reduced LE of 29.47% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gotten increased LE of 39.39%, 68.33%, 44.78%, and 66.93% respectively.
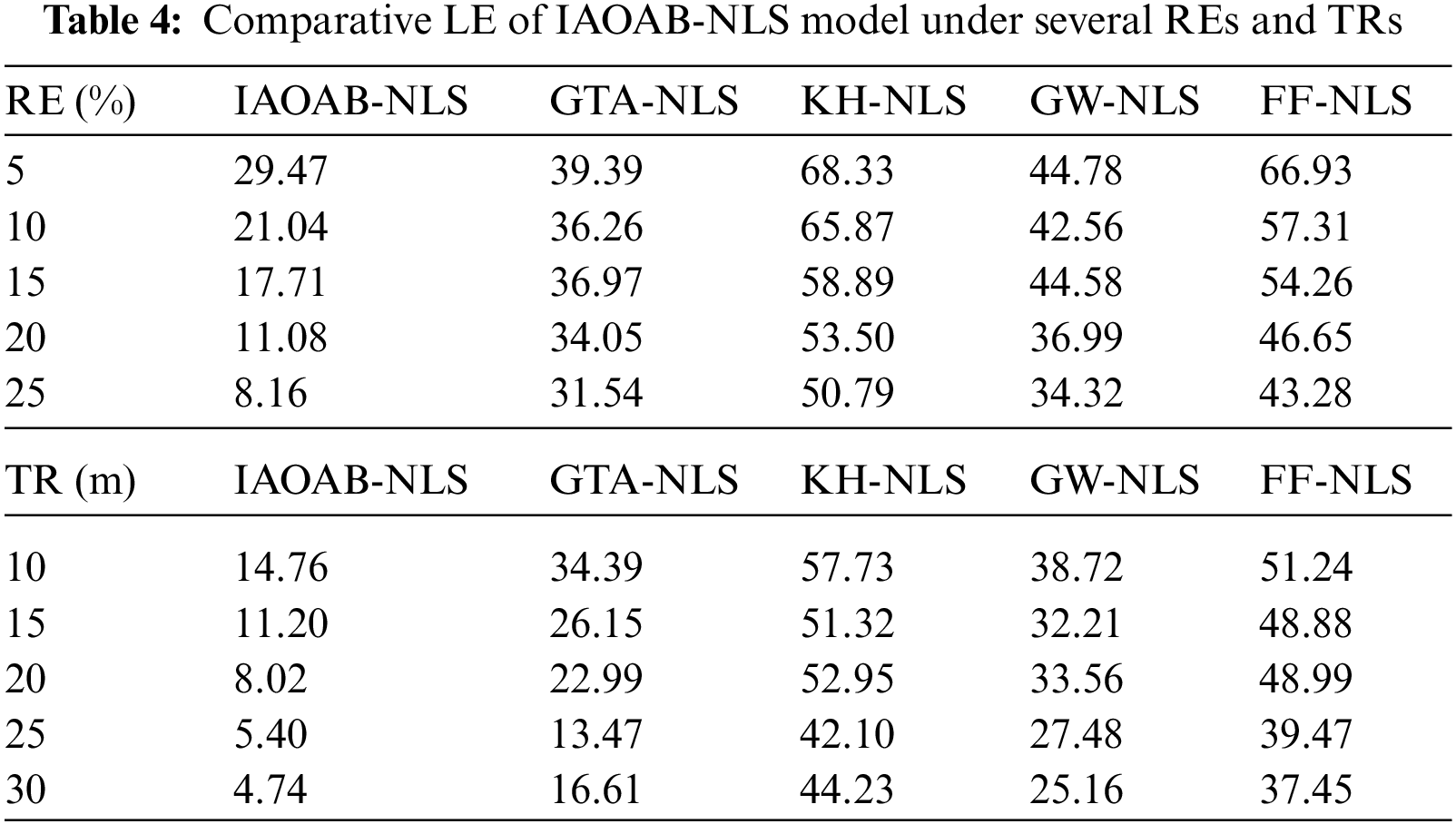
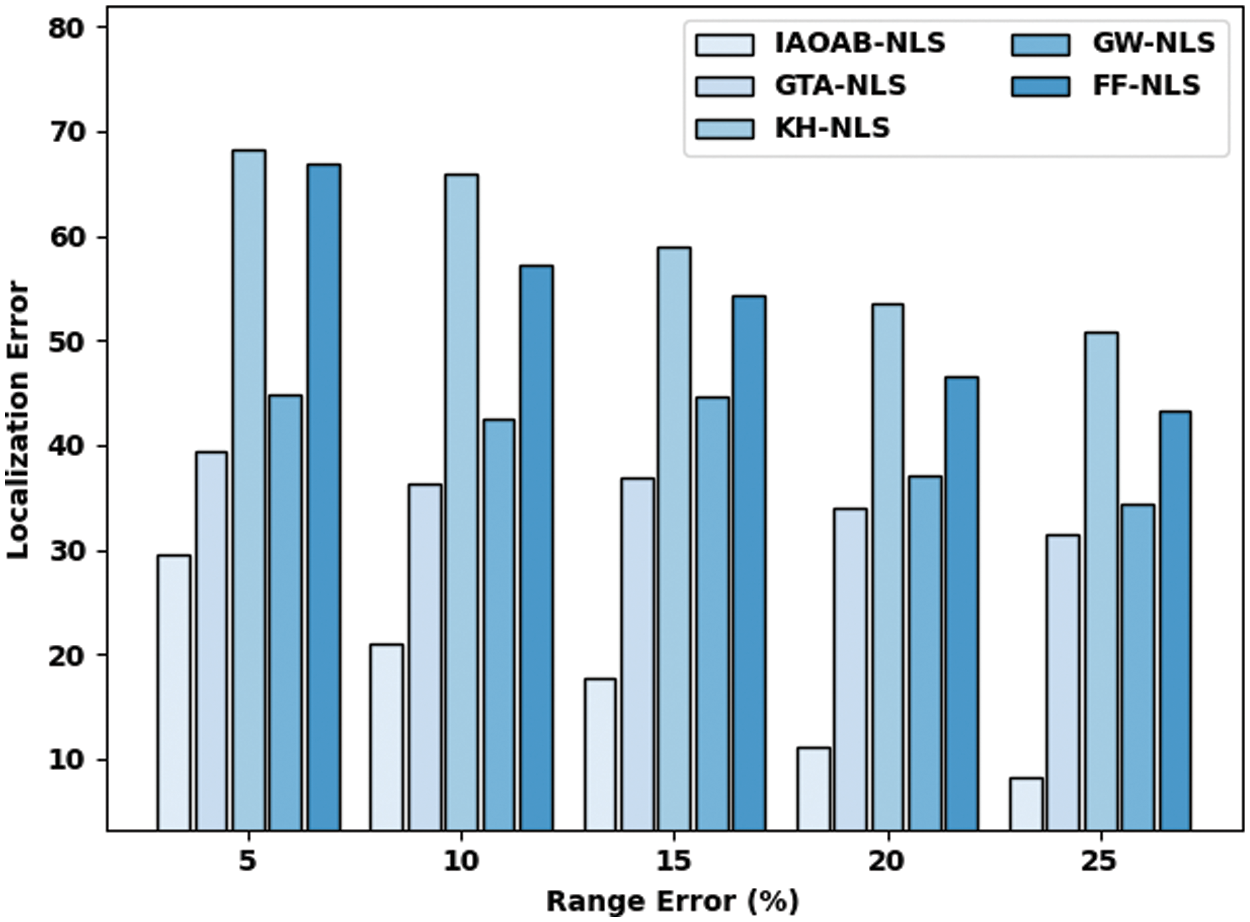
Figure 6: LE examination of IAOAB-NLS model under several REs
Then, with 10% of REs, the IAOAB-NLS model has offered reduced LE of 21.04% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gotten increased LE of 36.26%, 65.873%, 42.56%, and 57.31% respectively.
At last, with 15% of RE, the IAOAB-NLS model has provided least LE of 17.71% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 36.97%, 58.89%, 44.58%, and 54.26% respectively. Eventually, with 25% of RE, the IAOAB-NLS model has provided least LE of 8.16% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 31.54%, 50.79%, 34.32%, and 43.28% respectively.
Finally, Fig. 7 delivers a complete LE investigation of the IAOAB-NLS model under dissimilar TR. The experimental outcomes directed that the IAOAB-NLS model has accomplished least LE under every AN. For instance, with 10TR, the IAOAB-NLS model has offered reduced LE of 14.76% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gotten increased LE of 34.39%, 57.73%, 38.72%, and 51.24% respectively. Moreover, with 15 TR, the IAOAB-NLS model has provided least LE of 11.20% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 26.15%, 51.32%, 32.21%, and 48.88% respectively. Furthermore, with 20 TR, the IAOAB-NLS model has provided least LE of 8.02% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 22.99%, 52.95%, 33.56%, and 48.99% respectively. In line with, under 25 TR, the IAOAB-NLS model has provided least LE of 5.40% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 13.47%, 42.10%, 27.48%, and 39.47% respectively.
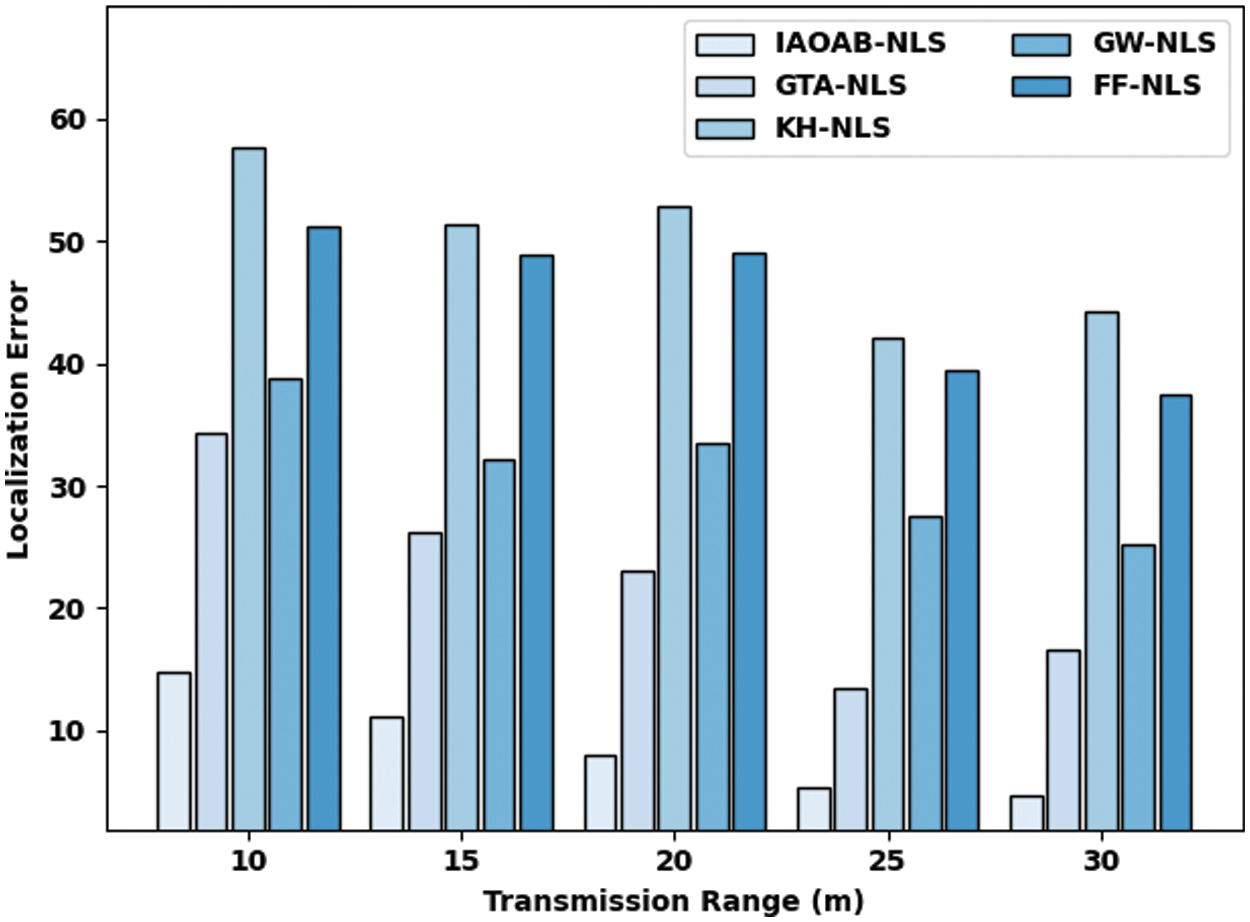
Figure 7: LE examination of IAOAB-NLS model under several REs and TRs
Equally, with 30 TR, the IAOAB-NLS model has provided least LE of 4.74% whereas the GTA-NLS, KH-NLS, GW-NLS, and FF-NLS models have gained increased NOLN of 16.61%, 44.23%, 25.16%, and 37.45% respectively.
The above mentioned experimental outcome pointed out that the IAOAB-NLS model has outperformed other models in accomplishing superior NL outcomes in WSN.
In this study, a novel IAOAB-NLS model has been developed for NL in WSN. The presented IAOAB-NLS model makes use of anchor nodes to determine proper positioning of the nodes. In addition, the IAOAB-NLS model is stimulated by the behaviour of Aquila. The IAOAB-NLS model has the ability to accomplish proper coordinate points of the nodes in the network. For guaranteeing the proficient NL process of the IAOAB-NLS model, widespread experimentation takes place to assure the betterment of the IAOAB-NLS model. The resultant values reported the effectual outcome of the IAOAB-NLS model irrespective of changing parameters in the network. Thus, the IAOAB-NLS model can appear as a novel tool for precise NL in the network. In future, hybrid AOA can be derived by the use of local searching techniques.
Funding Statement: The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work under Grant Number (RGP 1/322/42). Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2022R303), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Y. Robinson, S. Vimal, E. Julie, K. L. Narayanan and S. Rho, “3-dimensional manifold and machine learning based localization algorithm for wireless sensor networks,” Wireless Personal Communications, vol. 77, no. 3, pp. 1, 2021. [Google Scholar]
2. S. Arjunan and S. Pothula, “A survey on unequal clustering protocols in Wireless Sensor Networks,” Journal of King Saud University - Computer and Information Sciences, vol. 31, no. 3, pp. 304–317, 2019. [Google Scholar]
3. J. Qiao, J. Hou, J. Gao and Y. Wu, “Research on improved localization algorithms RSSI-based in wireless sensor networks,” Measurement Science and Technology, vol. 32, no. 12, pp. 125113, 2021. [Google Scholar]
4. S. Arjunan and P. Sujatha, “Lifetime maximization of wireless sensor network using fuzzy based unequal clustering and ACO based routing hybrid protocol,” Applied Intelligence, vol. 48, no. 8, pp. 2229–2246, 2018. [Google Scholar]
5. J. Uthayakumar, T. Vengattaraman and P. Dhavachelvan, “A new lossless neighborhood indexing sequence (NIS) algorithm for data compression in wireless sensor networks,” Ad Hoc Networks, vol. 83, no. 2009, pp. 149–157, 2019. [Google Scholar]
6. S. Arjunan, S. Pothula and D. Ponnurangam, “F5N-based unequal clustering protocol (F5NUCP) for wireless sensor networks,” International Journal of Communication Systems, vol. 31, no. 17, pp. e3811, 2018. [Google Scholar]
7. S. Famila, A. Jawahar, A. Sariga and K. Shankar, “Improved artificial bee colony optimization based clustering algorithm for SMART sensor environments,” Peer-to-Peer Networking and Applications, vol. 13, no. 4, pp. 1071–1079, 2020. [Google Scholar]
8. W. Sun, L. Dai, X. R. Zhang, P. S. Chang and X. Z. He, “RSOD: Real-time small object detection algorithm in UAV-based traffic monitoring,” Applied Intelligence, vol. 92, no. 6, pp. 1–16, 2021. [Google Scholar]
9. W. Fang, W. Zhang, L. Shan, B. Assefa and W. Chen, “Ldpc code’s decoding algorithms for wireless sensor network: A brief review,” Journal of New Media, vol. 1, no. 1, pp. 45–50, 2019. [Google Scholar]
10. T. K. Mohanta and D. K. Das, “Advanced localization algorithm for wireless sensor networks using fractional order class topper optimization,” The Journal of Supercomputing, vol. 78, no. 8, pp. 10405–10433, 2022. [Google Scholar]
11. D. Xue, “Research of localization algorithm for wireless sensor network based on DV-Hop,” EURASIP Journal on Wireless Communications and Networking, vol. 2019, no. 1, pp. 218, 2019. [Google Scholar]
12. S. Kumar, S. Kumar and N. Batra, “Optimized distance range free localization algorithm for WSN,” Wireless Personal Communications, vol. 117, no. 3, pp. 1879–1907, 2021. [Google Scholar]
13. S. Messous, H. Liouane, O. Cheikhrouhou and H. Hamam, “Improved recursive dv-hop localization algorithm with rssi measurement for wireless sensor networks,” Sensors, vol. 21, no. 12, pp. 4152, 2021. [Google Scholar]
14. G. S. Walia, P. Singh, M. Singh, M. Abouhawwash, H. J. Park et al., “Three dimensional optimum node localization in dynamic wireless sensor networks,” Computers, Materials & Continua, vol. 70, no. 1, pp. 305–321, 2022. [Google Scholar]
15. L. Abualigah, D. Yousri, M. A. Elaziz, A. A. Ewees, M. A. A. Al-qaness et al., “Aquila optimizer: A novel meta-heuristic optimization algorithm,” Computers & Industrial Engineering, vol. 157, no. 11, pp. 107250, 2021. [Google Scholar]
16. A. M. AlRassa, M. A. A. Al-qaness, A. A. Ewees, S. Ren, M. A. Elaziz et al., “Optimized ANFIS model using aquila optimizer for oil production forecasting,” Processes, vol. 9, no. 7, pp. 1194, 2021. [Google Scholar]
17. M. R. Hussan, M. I. Sarwar, A. Sarwar, M. Tariq, S. Ahmad et al., “Aquila optimization based harmonic elimination in a modified h-bridge inverter,” Sustainability, vol. 14, no. 2, pp. 929, 2022. [Google Scholar]
18. P. Sekhar, E. L. Lydia, M. Elhoseny, M. A. Akaidi, M. M. Selim et al., “An effective metaheuristic based node localization technique for wireless sensor networks enabled indoor communication,” Physical Communication, vol. 48, no. 6, pp. 101411, 2021. [Google Scholar]
19. L. Singh, A. K. Singh and P. K. Singh, “Secure data hiding techniques: A survey,” Multimedia Tools and Applications, vol. 79, no. 23–24, pp. 15901–15921, 2020. [Google Scholar]
20. Y. Kumar and P. K. Singh, “Improved cat swarm optimization algorithm for solving global optimization problems and its application to clustering,” Applied Intelligence, vol. 48, no. 9, pp. 2681–2697, 2018. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools