| Computers, Materials & Continua DOI:10.32604/cmc.2022.029362 | |
| Article |
Coverage Control for Underwater Sensor Networks Based on Residual Energy Probability
1School of Artificial Intelligence, Beijing Technology and Business University, Beijing, 100048, China
2Beijing Laboratory for Intelligent Environmental Protection, Beijing, 100048, China
3Beijing Institute of Fashion Technology, Beijing, 100029, China
4Smart City College, Beijing Union University, Beijing, 100101, China
5University College Dublin, Dublin4, Ireland
*Corresponding Author: Qian Sun. Email: sunqian0403@hotmail.com
Received: 02 March 2022; Accepted: 17 May 2022
Abstract: Underwater sensor networks have important application value in the fields of water environment data collection, marine environment monitoring and so on. It has some characteristics such as low available bandwidth, large propagation delays and limited energy, which bring new challenges to the current researches. The research on coverage control of underwater sensor networks is the basis of other related researches. A good sensor node coverage control method can effectively improve the quality of water environment monitoring. Aiming at the problem of high dynamics and uncertainty of monitoring targets, the random events level are divided into serious events and general events. The sensors are set to sense different levels of events and make different responses. Then, an event-driven optimization algorithm for determining sensor target location based on self-organization map is proposed. Aiming at the problem of limited energy of underwater sensor nodes, considering the moving distance, coverage redundancy and residual energy of sensor nodes, an underwater sensor movement control algorithm based on residual energy probability is proposed. The simulation results show that compared with the simple movement algorithm, the proposed algorithm can effectively improve the coverage and life cycle of the sensor networks, and realize real-time monitoring of the water environment.
Keywords: Random event; self-organizing map algorithm; redundancy; energy consumption; coverage
The ocean is an important base for human survival and sustainable development of society, and water environmental protection is an important part of ecological protection. In recent years, human beings have paid more and more attention to the monitoring of the water environment [1,2]. In addition, China has a vast sea area and a long coastline, so the improvement of ocean monitoring capabilities can effectively safeguard maritime rights and interests. Therefore, the research on coverage control of underwater sensor network has important strategic significance [3], and it has gradually become a hot issue for experts and scholars.
Underwater Wireless Sensor Networks (UWSNs) have a certain number of wireless sensor nodes which are deployed in a given target water area as a tool for collecting physical information in the environment. The information collected by each underwater sensor node is transmitted to the sink node or base station. Furthermore, the collected information is sent to data monitoring agency for processing via satellite or the Internet.
At present, underwater sensor networks are widely used in underwater applications such as oceanographic data acquisition, environmental pollution monitoring, and underwater military monitoring [4,5]. The research of sensor coverage control is the basis of underwater wireless sensor network research. An excellent sensor coverage control strategy can effectively ensure the overall performance of the underwater wireless sensor network.
In this paper, aiming at the problem of high dynamics and uncertainty of monitoring targets, the random event level is divided into serious events and general events. The sensors are set to sense different levels of events and make different responses, and an event-driven optimization algorithm for determining sensor target location based on self-organization map is proposed. And then aiming at the problem of limited energy of underwater sensor nodes, considering the moving distance, coverage redundancy and residual energy of sensor nodes, an underwater sensor movement control algorithm based on residual energy probability is proposed. We also verify the feasibility and effectiveness of the proposed algorithm through the simulation. The remainder of this article is organized as follows. Firstly, we introduce the research status of event-driven underwater sensor coverage control to understand the latest research trends in Section 2. Then, in Section 3, considering the high cost of deployment in the water environment, we build heterogeneous sensor networks to reduce the node cost, and then divide the event levels into serious events and general events, and establish an underwater sensor network model based on random events. In Section 4, aiming at the problem of high dynamics and uncertainty of monitoring targets, sensors are set to sense different levels of events and make different responses, and an event-driven optimization algorithm for determining sensor target location based on self-organization map is proposed. In Section 5, aiming at the problem of limited energy of underwater sensor nodes, considering the moving distance, coverage redundancy and residual energy of sensor nodes, an underwater sensor movement control algorithm based on residual energy probability is proposed. In Section 6, we analyze and verify the feasibility and effectiveness of the proposed algorithm. Finally, in Section 7, we conclude the paper and introduce the future direction of the current work.
Due to the particularity of underwater environment, the research on coverage control of underwater sensor networks has unique characteristics compared with the research on coverage control of terrestrial wireless sensor networks. Underwater environment is complex and changeable, random events are dynamic, sensor nodes have good mobility and limited energy [6,7]. Therefore, how to dynamically adjust the node position according to the underwater situation and the occurrence of random events in order to achieve the best monitoring effect is an urgent problem to be studied and dealt with.
For the occurrence of random events, experts and scholars have done a lot of research. For example, reference [8] proposed a fish swarm inspired underwater sensor node deployment algorithm for random events, which makes the nodes tend to and cover the events independently by simulating the behavior of fish swarm and combined with congestion control. The algorithm can solve the coverage control problem of underwater sensor nodes, and has the advantages of low complexity and small amount of calculation. However, there are some problems, such as long deployment time, confused and long distances movement of nodes, too many nodes participating in network reconstruction and so on. Reference [9] proposed a redeployment algorithm based on virtual force. According to the detected event information, the sensor moves based on the virtual force method, and by introducing the idea of clustering control, the node movement range is limited to each cluster, so as to reduce the scale of reconstruction and ensure the connectivity of the network. Reference [10] proposed a distributed multi-target tracking algorithm based on event triggering strategy combined with K-means clustering algorithm. The distributed multi-target tracking algorithm based on event triggering measurement and communication strategy can not only ensure the tracking accuracy, but also significantly reduce the energy consumption of the network. Reference [11] proposed an event driven dynamic deployment model of key area monitoring stations and the corresponding local search algorithm. The algorithm further improves the search performance of the algorithm by adding redundant parameters, so that the monitoring nodes can search for other new targets in the area on the premise of maintaining effective monitoring of previous targets. It also improves the overall monitoring performance. Reference [12] adopts the self-organization map algorithm (SOM) to make the nodes tend to the area with high event density through the attraction of events to the nodes, so as to achieve effective coverage of events. Reference [13] studies the underwater sensor node layout problem. The event-driven sensor node placement problem model in underwater three-dimensional space is established, and the algorithm of event-driven three-dimensional underwater sensor node placement is optimized. The simulation results show that the algorithm makes the sensor nodes cover events independently, and match the distribution density of sensor nodes with the distribution density of events. The algorithm has the advantages of low complexity, small amount of computation and fast convergence. Reference [14] proposed a method of underwater sensor node deployment based on pure strategic Nash Equilibrium. In view of the fact that game theory can be used to solve the problems of resource allocation, behavior decision, routing protocol and so on, the method of game theory is applied to the deployment of underwater sensor nodes. The underwater sensor node is regarded as a rational, intelligent individual who pursues the maximization of interests, and can make rational analysis and choice according to the environment in order to maximize its own interests. In this method, a limited number of nodes play the game according to the method of pure strategic Nash Equilibrium, which makes the nodes independently tend to and cover the events, and at the same time matches the node distribution density with the event distribution density. The simulation results show that the algorithm is effective in solving the underwater node deployment problem. Reference [15] proposed a distributed underwater sensor node deployment algorithm inspired by particle swarm. The optimal control of underwater sensor coverage is carried out by simulating the moving behavior of particles in the search space. Combined with the water flow field, the simulation results show that the algorithm applied to the deployment of underwater nodes can approximately achieve the performance of the centralized algorithm and has the advantage of distributed implementation.
Although experts and scholars have done a lot of research, due to the high dynamic and uncertain characteristics of random events in underwater environment, the problem of how to independently adjust the position of sensors to achieve the optimal monitoring effect under the condition of limited energy is still needed to be solved better. In order to solve the above problems, we firstly determine the position where the sensor nodes need to move based on random events. Then considering the moving distance and redundancy, a sensor moving algorithm based on residual energy probability is proposed.
The underwater wireless sensor networks consist of m sensor nodes,
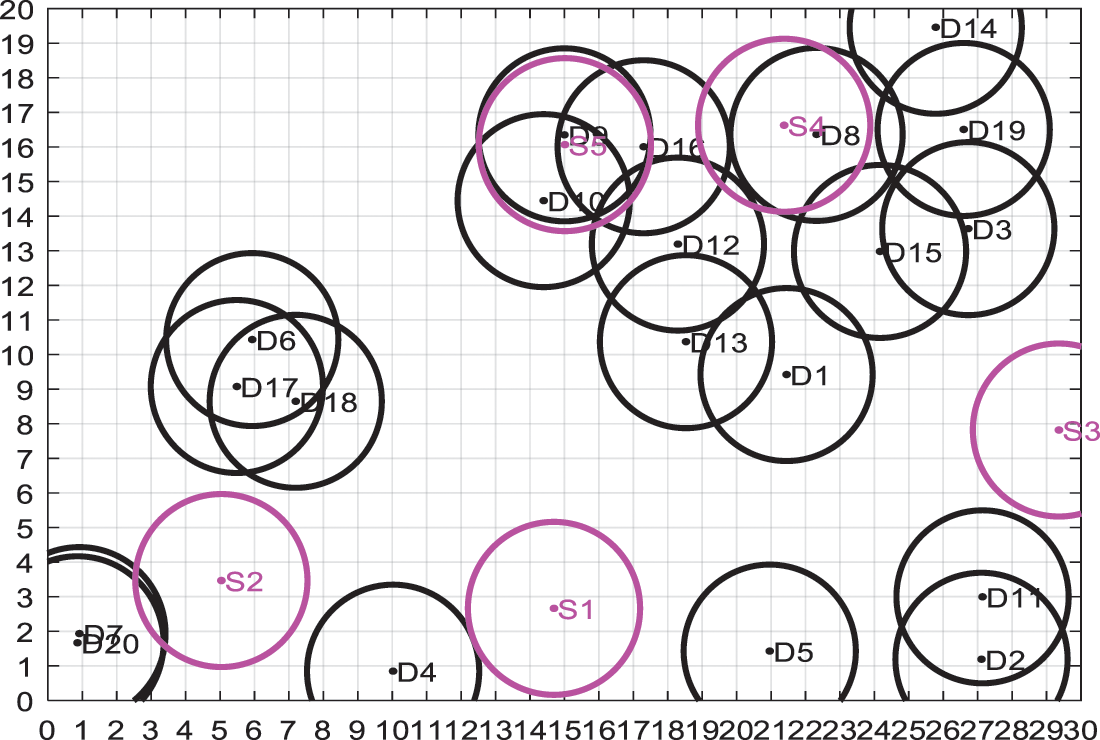
Figure 1: The initial deployment of the sensors
3.2 The Regional Model Based on Random Events
Compared with the deployment of land sensors, underwater sensor deployment is unique. The underwater environment is complex and changeable, and random events are highly dynamic and uncertain. In view of the above characteristics, it is necessary to consider how the sensor can autonomously adjust the position according to the changes of the environment and random events, so as to achieve the purpose of real-time monitoring of random events. In the process of water environment monitoring, preset events occur. Considering the influence of different factors on water environment, the set of events is presupposed as follows: events = {‘toxic’, ‘water bloom’, ‘temperature’, ‘rainfall’}, in which toxic and water bloom are serious random events, temperature and rainfall are general random events.
In this section, it is assumed that random events in the water environment are L-shaped unevenly distributed. The regional model based on random events is shown in Fig. 2, where the red solid hexagonal star represents serious random events and red stars represent general random events.
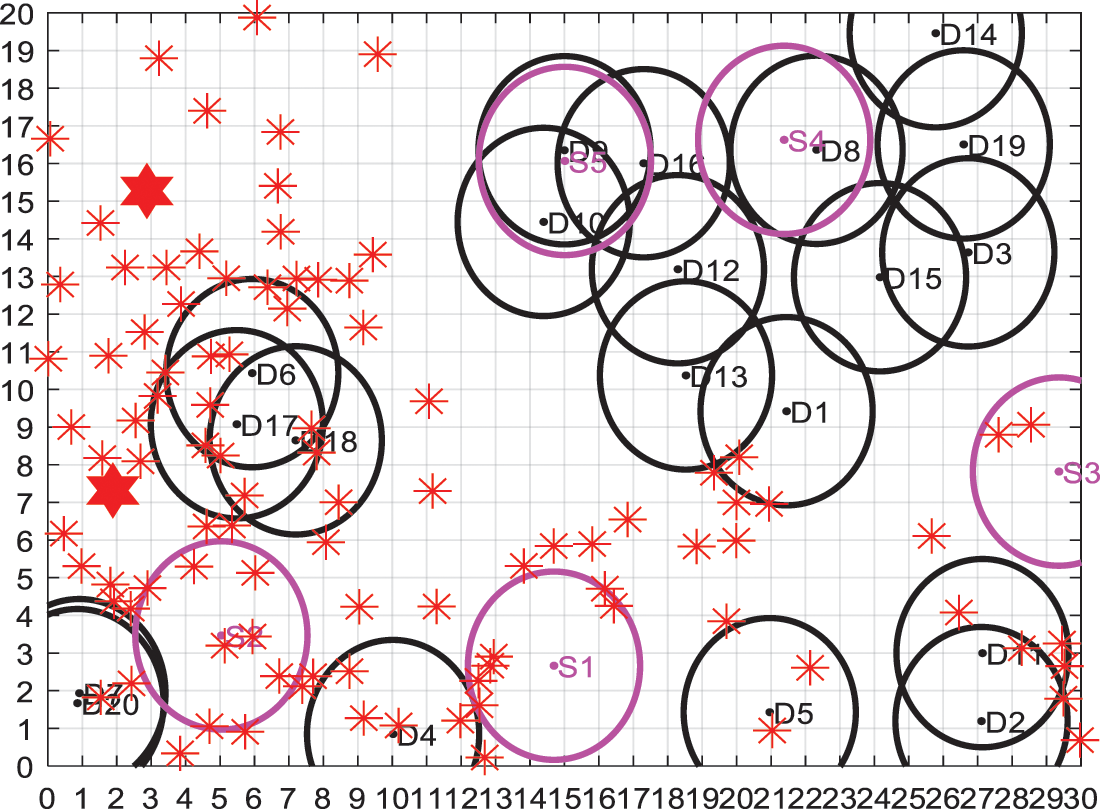
Figure 2: The regional model based on random events
4 Determine the Target Position of the Sensor Based on Random Events
When a random event occurs in a complex underwater environment which is not covered by the sensor, it is necessary to monitor the real-time event by moving the sensor to the location of the event. Mobile sensors can be moved after deployment, which enables nodes to move to the area where random events occur. The main focus of UWSNs is to determine the ideal position to which the sensor needs to move, and select the appropriate sensor to move, in order to achieve the best monitoring effect.
In the process of water environment monitoring, random events are divided into serious events and general events. The influence range of the serious event is different from that of the general event. When a random event occurs, the type of the event is judged first. If it is a serious event, the location of the serious event is determined as the target position where the sensor needs to be moved. If it is a general event, the self-organizing map algorithm [17,18] is used to determine the target position where the sensor needs to be moved. If serious events and general events occur at the same time, serious events have the priority.
The SOM algorithm is an unsupervised clustering method, which is to classify the target through a certain method [19]. Its network structure is hierarchical and its simplest structure has an input layer and a competition layer. The network obtains the response opportunity of the input pattern through the competition between neurons, and finally only one neuron becomes the winner, then correspondingly adjusts the connection weights of other neurons and the winner’s neuron to make them easier to win in the subsequent competition, and the final competition winner shows the classification of the input pattern [20,21]. When general random events occur in the underwater environment, we hope to get the ideal position where the sensor needs to be moved, and we can also regard it as clustering, that is, classifying the target so that it is covered by a certain underwater node to achieve the purpose of monitoring.
In this paper, it is presupposed that serious events and general events occur at the same time, and the ideal position where the sensor needs to be moved is determined based on random events is shown in Fig. 3, The small green square represents the target position of the sensor.
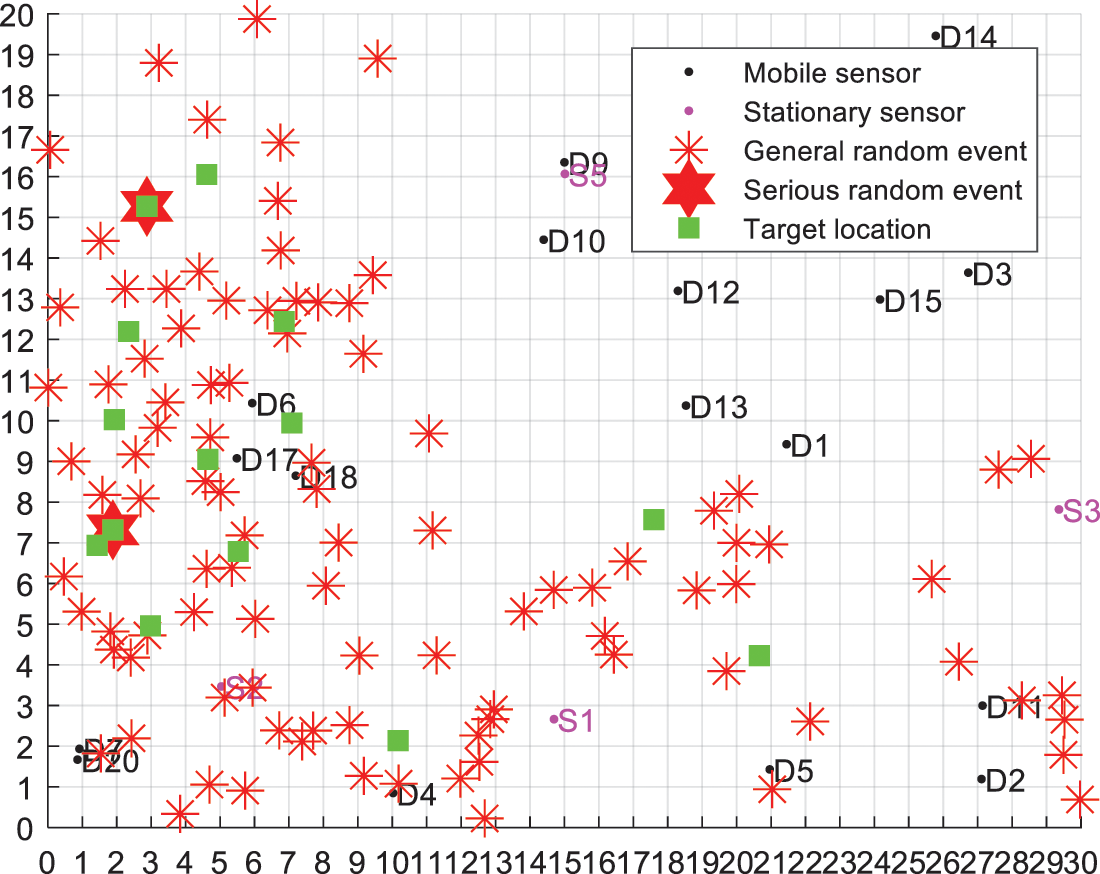
Figure 3: Sensor target location determined based on random event
5 Sensor Mobility Strategy Based on Residual Energy Probability
When random events occur, the UWSNs network needs to select appropriate nodes and move them to the ideal location to monitor the target [22,23]. The target location where the sensor needs to be moved has been determined above, and then it is necessary to consider how to select the appropriate node to move. The traditional simple movement algorithm selects the neighbor nodes closest to the ideal location to move, but it has the following two problems. Firstly, it does not consider the remaining energy of the sensor. Also, if some nodes are far away from the event, the nodes cannot be fully utilized. In response to the above problems, a sensor movement algorithm based on the residual energy probability is proposed, which also considers the moving distance and redundancy at the same time.
Redundancy is defined as the overlap ratio among sensor nodes’ sensing range, denoted as R, as shown in Fig. 4.
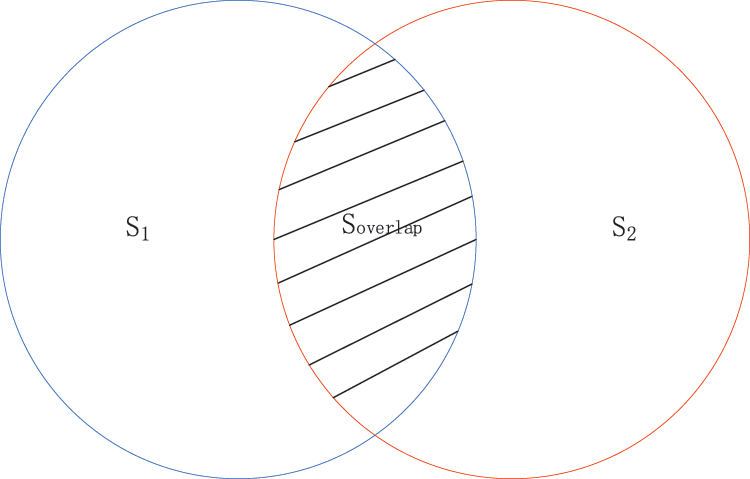
Figure 4: Redundant area where two circles intersect
Since we assume that all sensor nodes are have the same sensing radius, so Eq. (1) can be rewritten as Eq. (2):
The redundancy requires calculating the area of intersection between circles. The overlapping area of the two circles can be obtained by Eq. (3):
where, r is the radius of the sensor, and d is the distance between the centers of the two circles.
5.2 The Probability of Residual Energy
In the deployment of water environment, firstly, the sensors are randomly deployed and L-shaped unevenly distributed events are set, then determine the target location where the sensors need to be moved based on random event, and finally, the appropriate sensors need to be selected to move to monitor random events.
The traditional simple moving algorithm selects the neighbor node closest to move to the ideal position. In this algorithm, the moving distance refers to the linear distance from one point
However, there are two problems in the simple mobility algorithm. One is that the sensor residual energy is not considered. The other is that if some nodes are far away from the event, the nodes cannot be made full use of. Aiming at the above problems, a sensor movement algorithm based on residual energy probability is proposed from the following aspects.
(1) The residual energy of mobile nodes is high. Select the node with high residual energy, so that the node can maintain the life cycle as long as possible after moving to the new location, and the node will not dead soon after moving to the new location because of insufficient residual energy.
(2) The redundancy of mobile nodes is large. Because most nodes with high redundancy overlap with other sensor nodes, even if the node with high redundancy is selected as a mobile node to leave its original position. Its sensing area is mostly the same as other sensor nodes and has little impact on the whole network system, so the node with high redundancy is selected as the target node.
(3) The moving distance of the moving sensor is small. Nodes will dynamically consume energy in the process of moving to the ideal position. If the moving distance of each selected node is large, a lot of energy will be consumed in the process of moving, which will reduce the life cycle of the network. Therefore, nodes with smaller moving distance are selected [24].
Based on the above three conditions, the residual energy probability is proposed in this section, as shown in Eq. (5).
where
where,
The closer the sensor is to the event, the greater the probability of becoming a mobile node. The greater the redundancy of a node, the greater the probability of becoming a mobile node. In this section, the probability of each node becoming a mobile node is calculated, so that the appropriate sensor can be selected to move.
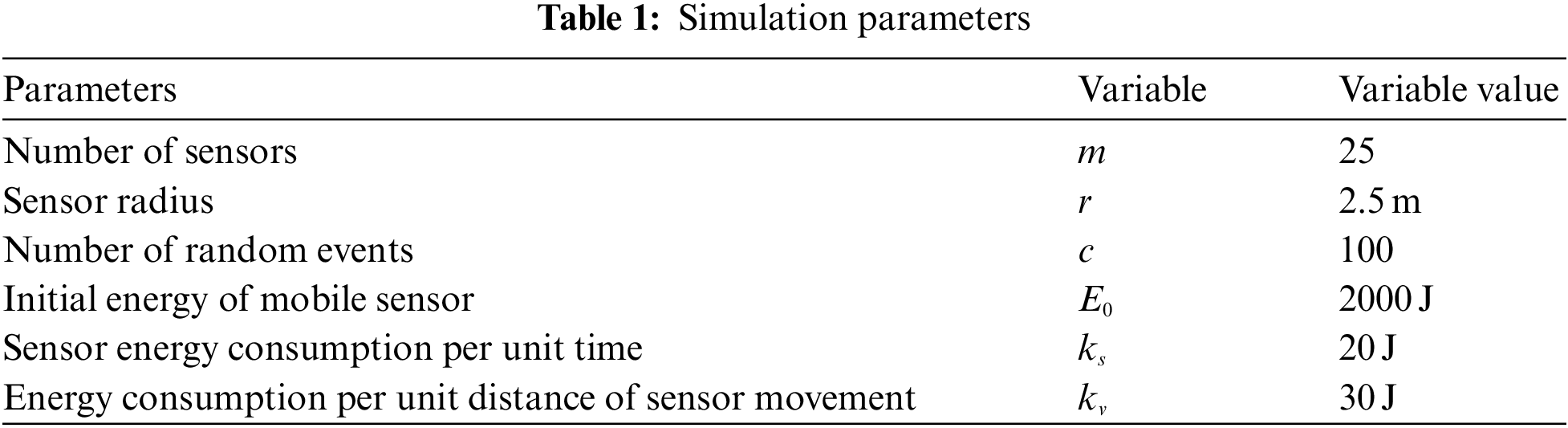
In this paper, the sensor movement algorithm based on residual energy probability is used to move the sensor to achieve the purpose of monitoring events. The experiment is set in the water area of 20 m × 30 m, 25 sensors are deployed, including 5 static sensors and 20 moving sensors. And the radius of the sensor is 2.5 m. Set 100 events randomly, including serious events and general events. The initial energy of mobile nodes is 2000 J, and the energy consumption of the sensor is 30 J when moving 1 m. The energy consumption is 20 J per hour.
The parameters used in the experiment are shown in Tab. 1.
6.2 Experimental Results and Analysis
When random events occur, the sensor needs to move to the area where the event is not monitored. Aiming at the problem that the traditional simple mobility algorithm does not consider the sensor residual energy and node utilization, a sensor mobility algorithm based on residual energy probability is proposed in this paper. The simple mobile algorithm is compared with the residual energy probability strategy. Fig. 5 shows the position of the sensor by using the simple moving algorithm to move the sensor. Fig. 6 shows the position of the sensor by using the residual energy probability strategy to move the sensors. As can be seen from Figs. 5 and 6, node 14 and node 15 are located at the edge of the area and are not effectively utilized. However, Edge nodes can be used effectively by the residual energy probability strategy.
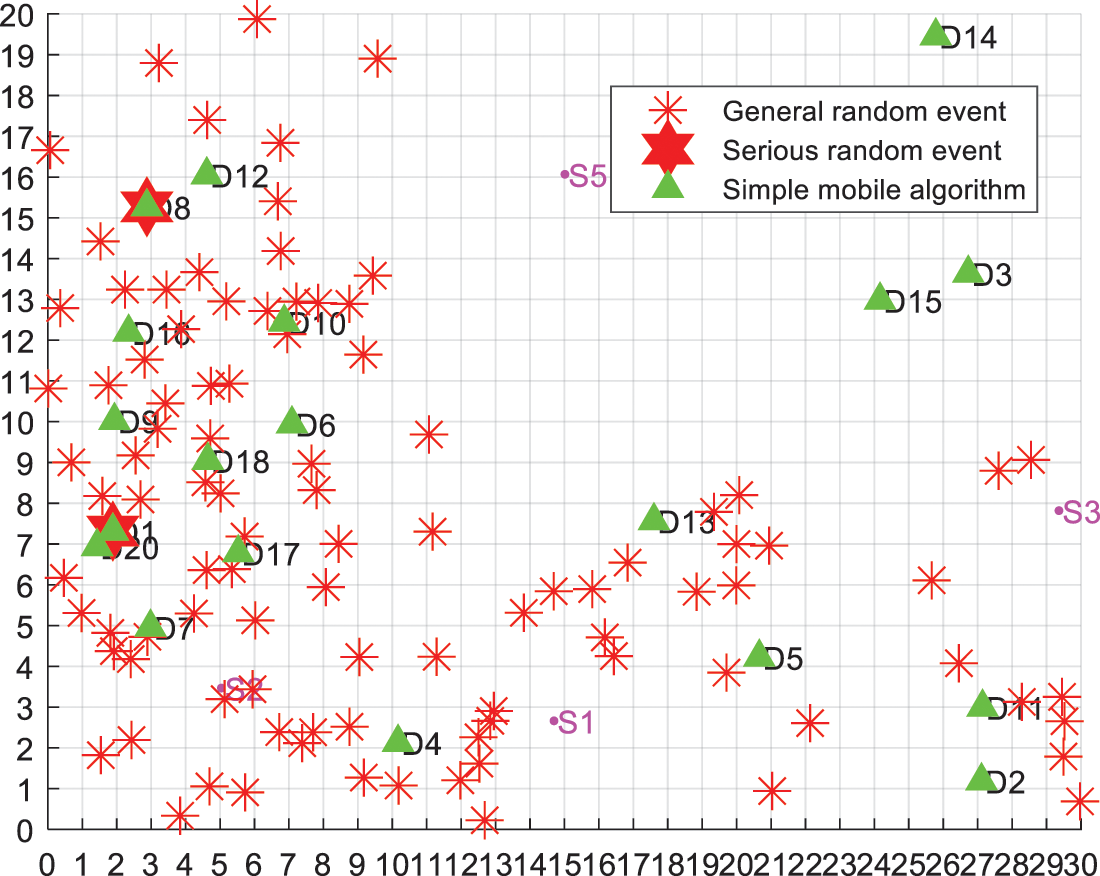
Figure 5: Moving the sensors based on simple movement algorithm
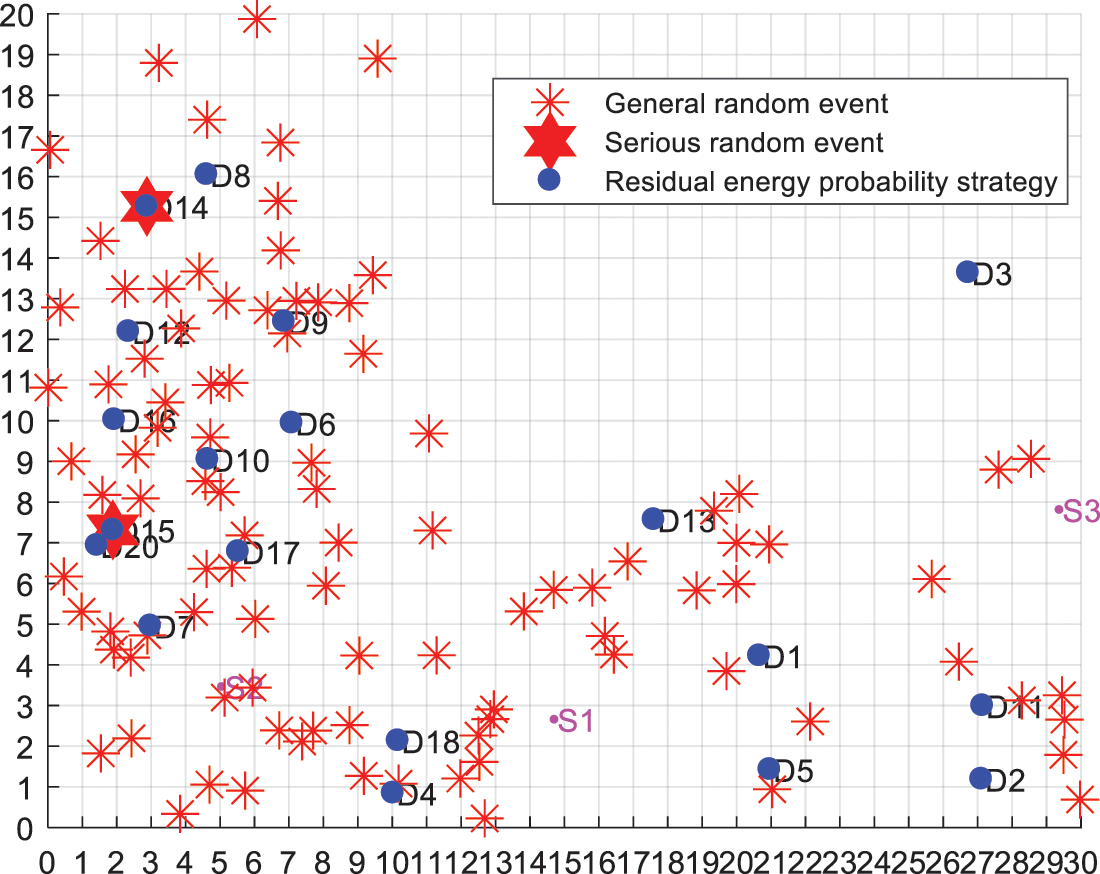
Figure 6: Moving sensors based on residual energy probability
Mobile sensor utilization is defined as the ratio of the number of mobile sensors which can monitor events to the total number of mobile sensors. Tab. 2 shows the comparison of the mobile sensor utilization between the simple mobile algorithm and residual energy probability strategy after 5 experiments. It can be seen from Tab. 2 that simple moving algorithm will cause waste of remote sensors, and the residual energy probability strategy can effectively improve the utilization of the sensors.

We also compare the mobile node residual energy and event coverage of the two algorithms. Fig. 7 shows the comparison diagram of the residual energy of the nodes. As can be seen from Fig. 7, some nodes’ residual energy are too low when using the simple mobile algorithm. Using the residual energy probability strategy to move the sensor, we can make better use of the remote nodes, and the residual energy of the nodes is relatively balanced, which can effectively prolong the life cycle of the network.
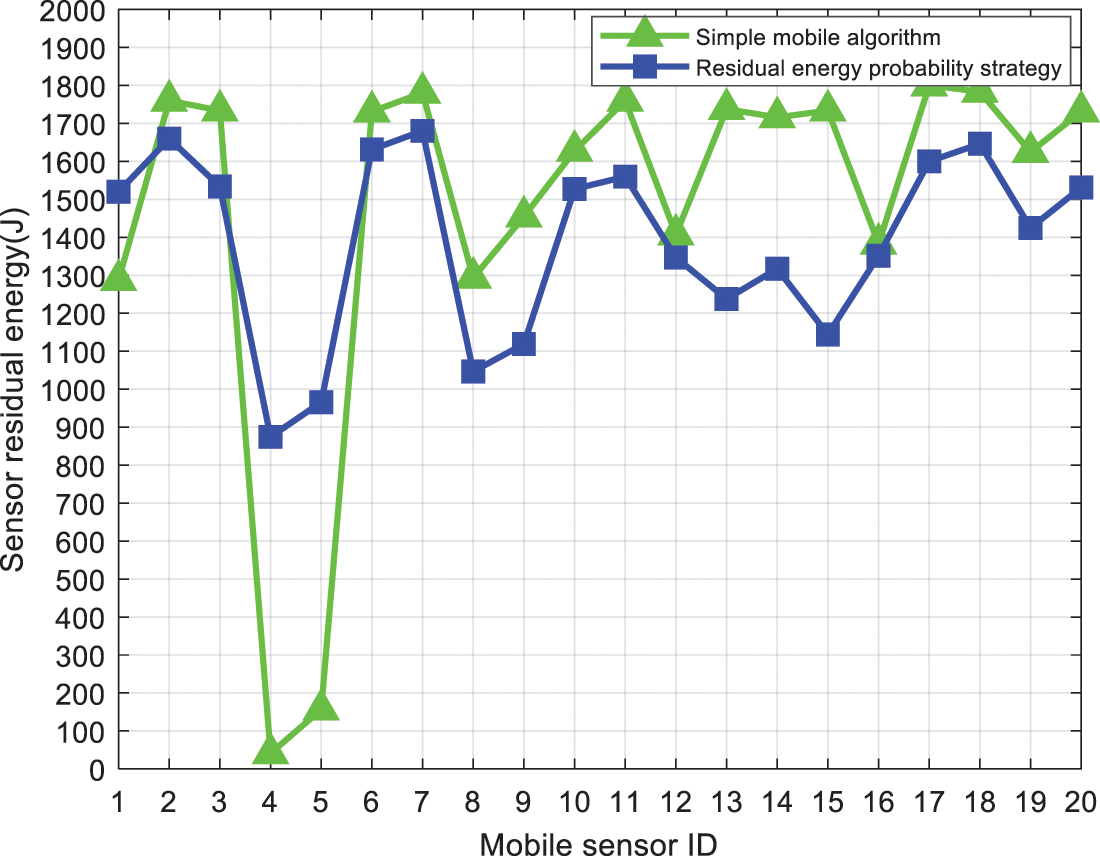
Figure 7: Comparison of residual energy of mobile sensors
Event coverage refers to the network deployment which is driven by events. Fig. 8 is a comparison diagram of event coverage. As can be seen from Fig. 8, the event coverage is about 80% when using the residual energy probability strategy, which is higher than that of simple mobile algorithm. While the coverage of random deployment is only about 45%.
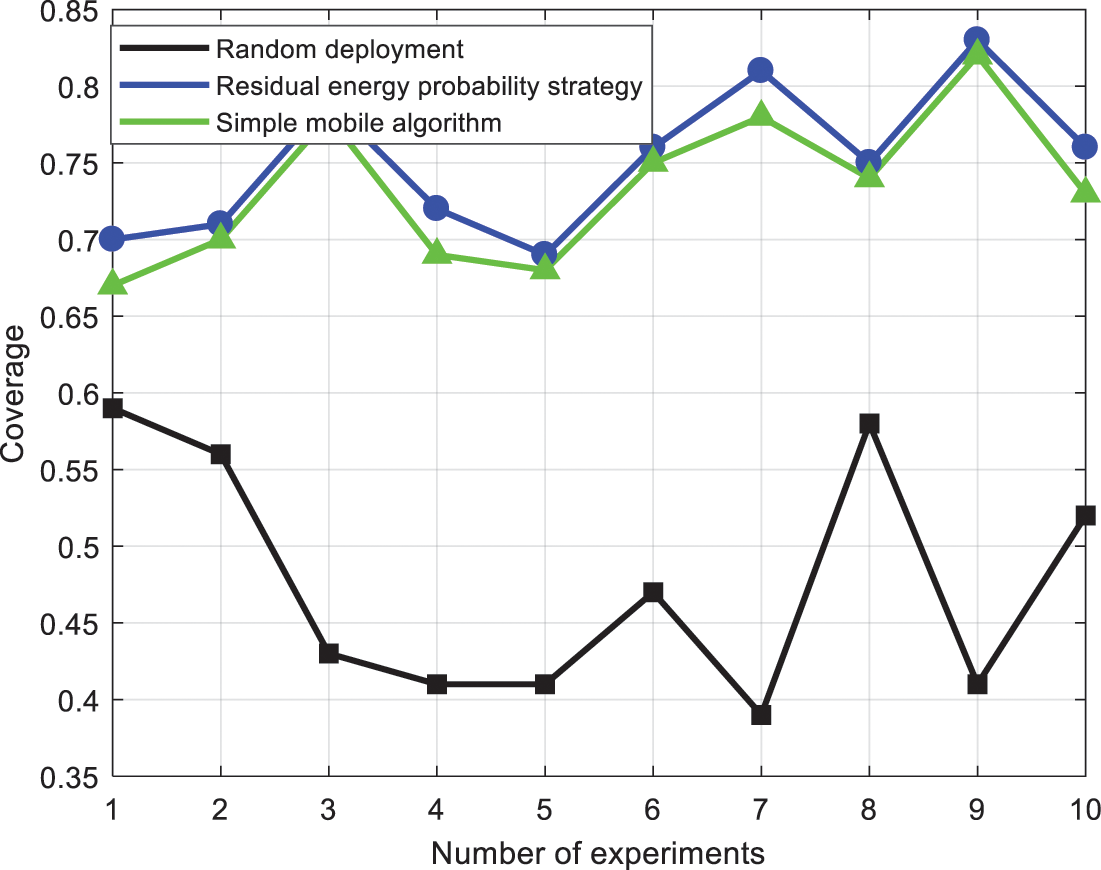
Figure 8: Comparison of event coverage
The deployment of underwater sensor network nodes is unique. Because the underwater environment is extremely complex, random events are dynamic and changeable, and sensor nodes have good mobility but limited energy. It is necessary to move the sensors to an area where the event can not be monitored when a random event occurs. The traditional simple mobile algorithm does not consider the remaining energy of the sensor and the utilization of the node when selecting the sensor. In view of the above situation, we firstly determine the position where the sensor needs to be moved based on random events. Then, considers the moving distance and redundancy at the same time, a sensor movement algorithm based on residual energy probability is proposed. The simulation results show that, compared with the traditional simple mobile algorithm, this method can effectively improve the coverage of sensors, node utilization and survival time, which can make sure of monitoring the random events better. In the future, the communication energy consumption in the network will be studied to better prolong the network life cycle on the premise of ensuring the effective monitoring of the network.
Acknowledgement: The authors extend their appreciation to the National Natural Science Foundation of China for funding this work and would like to thank the editors and reviewers for their review and recommendations.
Funding Statement: This research was funded by the National Natural Science Foundation of China, No. 61802010; Hundred-Thousand-Ten Thousand Talents Project of Beijing No. 2020A28; National Social Science Fund of China, No.19BGL184; Beijing Excellent Talent Training Support Project for Young Top-Notch Team No. 2018000026833TD01 and Academic Research Projects of Beijing Union University, No. ZK30202103.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. G. Ahmed, S. Islam, I. Ali, I. A. Hayder, A. Ibrahim et al., “Adaptive power control aware depth routing in underwater sensor networks,” Computers, Materials & Continua, vol. 69, no. 1, pp. 1301–1322, 2021. [Google Scholar]
2. X. Y. Wang, G. X. Cheng, Q. Sun, J. P. Xu, H. Y. Zhang et al., “An event-driven energy-efficient routing protocol for water quality sensor networks,” Wireless Networks, vol. 26, no. 8, pp. 5855–5866, 2020. [Google Scholar]
3. A. Sun, X. Cao, X. Xiao and L. Xu, “A fuzzy-based bio-inspired neural network approach for target search by multiple autonomous underwater vehicles in underwater environments,” Intelligent Automation & Soft Computing, vol. 27, no. 2, pp. 551–564, 2021. [Google Scholar]
4. S. P. Deepak and M. B. Mukeshkrishnan, “Secured route selection using e-aco in underwater wireless sensor networks,” Intelligent Automation & Soft Computing, vol. 32, no. 2, pp. 963–978, 2022. [Google Scholar]
5. A. Mehbodniya, S. Bhatia, A. Mashat, M. Elangovan and S. Sengan, “Proportional fairness based energy efficient routing in wireless sensor network,” Computer Systems Science and Engineering, vol. 41, no. 3, pp. 1071–1082, 2022. [Google Scholar]
6. A. Al Guqhaiman, O. Akanbi and A. Aljaedi, “A survey on MAC protocol approaches for underwater wireless sensor networks,” IEEE Sensors Journal, vol. 21, no. 3, pp. 3916–3932, 2021. [Google Scholar]
7. M. Y. Zhang, W. Y. Cai and X. D. Zheng, “Energy balance and delay optimization depth routing protocol for underwater sensor networks,” Journal of Sensing Technology, vol. 32, no. 8, pp. 1239–1244, 2019. [Google Scholar]
8. N. Xia, C. S. Wang and R. Zheng, “Swarm inspired underwater sensor deployment,” Journal of Automation, vol. 38, no. 2, pp. 295–302, 2012. [Google Scholar]
9. L. L. Wang, C. Huang and Z. L. Xu, “Research on event-driven deployment of underwater sensor networks,” Journal of Automation, vol. 32, no. 9, pp. 50–52, 57, 2013. [Google Scholar]
10. L. L. Zhang, “Research on event-driven target tracking algorithm in wireless sensor networks,” M.S. dissertation, Dongnan University, China, 2019. [Google Scholar]
11. W. Hu, B. Zheng and L. Yao, “Research on event-driven deployment algorithm of monitoring stations in key sea areas,” Computer Engineering and Application, vol. 53, no. 7, pp. 136–140, 2017. [Google Scholar]
12. C. Koutsougeras, Y. Liu and R. Zheng, “Event-driven sensor deployment using self-organizing maps,” International Journal of Sensor Networks, vol. 3, no. 3, pp. 142 − 151, 2008. [Google Scholar]
13. J. Z. Gao, “Event-driven arrangement of underwater sensor nodes,” Mine Warfare & Ship Self-Defence, vol. 2, pp. 53–57, 2016. [Google Scholar]
14. S. S. Dong, “Deployment of underwater sensor nodes based on pure strategy nash equilibrium,” M.S. dissertation, Hefei University of Technology, China, 2016. [Google Scholar]
15. H. Z. Du, “Deployment of underwater sensor nodes inspired by particle swarm,” M.S. dissertation, Hefei University of Technology, China, 2011. [Google Scholar]
16. Q. Sun, Z. P. Shen, J. L. Liang, X. Y. Wang, J. P. Xu et al., “Energy-efficient deployment of water quality sensor networks,” Computers Materials & Continua, vol. 68, no. 3, pp. 3967–3977, 2021. [Google Scholar]
17. S. Patra and L. Bruzzone, “A novel SOM-SVM-based active learning technique for remote sensing image classification,” IEEE Transactions on Geoscience and Remote Sensing, vol. 52, no. 11, pp. 6899–6910, 2014. [Google Scholar]
18. H. Hikawa and Y. Maeda, “Improved learning performance of hardware self-organizing map using a novel neighborhood function,” IEEE Transactions on Neural Networks and Learning Systems, vol. 26, no. 11, pp. 2861–2873, 2015. [Google Scholar]
19. F. An, X. Zhang, L. Chen and H. J. Mattausch, “A Memory-based modular architecture for SOM and LVQ with dynamic configuration,” IEEE Transactions on Multi-Scale Computing Systems, vol. 2, no. 4, pp. 234–241, 2016. [Google Scholar]
20. X. Li and D. Zhu, “An adaptive SOM neural network method for distributed formation control of a group of AUVs,” IEEE Transactions on Industrial Electronics, vol. 65, no. 10, pp. 8260–8270, 2018. [Google Scholar]
21. C. Yang, S. Su, X. Ju and J. Song, “A mobile sensors dispatch scheme based on improved SOM algorithm for coverage hole healing,” IEEE Sensors Journal, vol. 21, no. 18, pp. 21080–21089, 2021. [Google Scholar]
22. J. Luo, Y. Chen, M. Wu and Y. Yang, “A survey of routing protocols for underwater wireless sensor networks,” IEEE Communications Surveys & Tutorials, vol. 23, no. 1, pp. 137–160, 2021. [Google Scholar]
23. A. Mathias, S. Dhanalakshmi, R. Kumar and R. Narayanamoorthi, “Deep neural network driven automated underwater object detection,” Computers, Materials & Continua, vol. 70, no. 3, pp. 5251–5267, 2022. [Google Scholar]
24. M. Jouhari, K. Ibrahimi, H. Tembine and J. Ben-Othman, “Underwater wireless sensor networks: A survey on enabling technologies, localization protocols, and internet of underwater things,” IEEE Access, vol. 7, pp. 96879–96899, 2019. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |