DOI:10.32604/cmc.2022.023392
| Computers, Materials & Continua DOI:10.32604/cmc.2022.023392 | |
| Article |
Support-Vector-Machine-based Adaptive Scheduling in Mode 4 Communication
1Riphah School of Computing & Innovation, Faculty of Computing, Riphah International University, Lahore Campus, Lahore, 54000, Pakistan
2Pattern Recognition and Machine Learning Lab, Department of Software, Gachon University, Seongnam, 13557, Korea
3College of Computing & Informatics, Saudi Electronic University, Riyadh, 11673, Saudi Arabia
4School of Computer Science, Minhaj University Lahore, Lahore, 54000, Pakistan
5Center for Cyber Security, Faculty of Information Science and Technology, Universiti Kebangsaan Malaysia (UKM), 43600, Bangi, Selangor, Malaysia
6School of Information Technology, Skyline University College, University City Sharjah, 1797, Sharjah, UAE
7School of Computer Science, National College of Business Administration & Economics, Lahore, 54000, Pakistan
*Corresponding Author: Sang-Woong Lee. Email: slee@gachon.ac.kr
Received: 06 September 2021; Accepted: 30 March 2022
Abstract: Vehicular ad-hoc networks (VANETs) are mobile networks that use and transfer data with vehicles as the network nodes. Thus, VANETs are essentially mobile ad-hoc networks (MANETs). They allow all the nodes to communicate and connect with one another. One of the main requirements in a VANET is to provide self-decision capability to the vehicles. Cognitive memory, which stores all the previous routes, is used by the vehicles to choose the optimal route. In networks, communication is crucial. In cellular-based vehicle-to-everything (CV2X) communication, vital information is shared using the cooperative awareness message (CAM) that is broadcast by each vehicle. Resources are allocated in a distributed manner, which is known as Mode 4 communication. The support vector machine (SVM) algorithm is used in the SVM-CV2X-M4 system proposed in this study. The k-fold model with different values of k is used to evaluate the accuracy of the SVM-CV2X-M4 system. The results show that the proposed system achieves an accuracy of 99.6%. Thus, the proposed system allows vehicles to choose the optimal route and is highly convenient for users.
Keywords: Mode-4 communication; ad-hoc vehicular network; CV2X; support vector machine
Automobiles are important because they allow people to travel from one location to another. Various systems are used to find an ideal route as well as the exact route details, such as traffic lights, schools, and universities. Using cognitive memory and CV2X communication, the proposed framework aims to boost or advance ad-hoc networking in order to enable vehicles to select the best route and share resources. Support vector machines (SVMs) constitute a machine learning approach that focuses on the principle of statistical education and is used for classification. Cognitive memory is used to store data and record all the routes taken by a vehicle, thereby enabling the vehicle to select the best route. The current vehicle route search is conducted until the original location of the vehicle is found; then, the destination is searched, the route to the destination is checked, and the route information is shown on the screen. The proposed method aims to provide vehicles with the ability to make their own choices in order to determine the best route. The scheme uses the vehicle concept; therefore, the best approach in this field is based on applying human reasoning to vehicles [1].
As numerous road constraints are involved, such as optimal approach and timely travel, a structure for human understanding is required in the automotive sector. The proposed scheme allows vehicles to select the best route on their own. The choice of the best route is a significant aspect of the scheme, and appropriate storage can be used to encode paths [2]. The proposed method provides secure and safe routes that are determined by the vehicle itself. Academic experience is important because learning and recording all the aspects is essential. This is important for users, and vehicles with information memory will be straightforward to operate. Note that the selected route is not the shortest route but the fastest route [3].
A framework that provides road safety and efficient traffic control is important for vehicular ad-hoc networks (VANETs). VANET vehicles use onboard units (OBUs) in various V2X use cases, which allow wireless communication. Mode 4 networking is used by LTE Node B for communication between vehicles without coverage. Mode 4 adopts the new PC5 framework for directly connected vehicles. The vehicles can periodically deliver information on the basic conditions to neighboring vehicles [4]. CV2X is endorsed by most mobile network operators and equipment manufacturers as well as leading automobile manufacturers, including Audi, BMW, Daimler, Ford, PSA, SAIC Motor Corporation, Tesla, and Toyota, who had teamed up for CV2X trials in preparation for the first commercial launch at the end of 2018. China is on track to become one of the first countries to implement CV2X, while some European countries are also at the forefront of adopting this technology. For instance, Huawei has conducted tests for China Mobile, SAIC Motor Corporation, Deutsche Telekom, Audi, and Toyota, including organizing events at the Hangzhou G20 summit in September 2016 [5].
CV2X aims to be completely compatible with the state-of-the-art 5G mobile technology, which will facilitate progress in future networks and devices. CV2X has been further improved, and its capabilities have been extended with the introduction of 15 of the 3 GPP specifications in June 2018 as well as 16 releases in June 2019. More than 800 mobile operators have set up 3GPP-enabled networks worldwide, allowing them to profit from global economies and cooperation. 3GPP has finalized all cellular vehicle technologies with the release of 14 specifications (Hirai et al., 2019). The purpose of this LTE-based communication system is to provide protection and information services for vehicles, thereby enabling cooperative intelligent transport (CIT) systems to minimize congestion and pollution while making travel faster and more efficient. Thus, it is expected to facilitate VANET development. Compared to previous dedicated vehicle networking systems, an updated 4G platform allows CV2X to support a broad range of features, typically based on the Wi-Fi variant known as 802.11p. In addition, CV2X uses two complementary transmission modes to provide a wide range of driving safety features [6].
In recent years, VANETs have attracted considerable attention in terms of applications of different V2X communication systems, especially in road safety implementation and effective traffic management. Using OBUs that enable communication systems for various V2X use cases, vehicles form an ad-hoc network. Wireless awareness is an indispensable feature for VANETs [7] in the practical configuration of vehicles. The WAVE protocol implements the IEEE 802.11p framework and provides a basic radio standard for dedicated short-distance communication (DSRC) operations in the frequency band of 5.9 GHz. Many recent studies in the literature have exemplified real-time applications of VANETs. A detailed survey on the criteria for wireless communication, technological status and future problems, and various tests and simulators for VANETs has been reported [8].
People use vehicles to find the optimal route from one location to another. The Global Positioning System (GPS) is essential for efficient transport because it provides information on all potential facilities and service routes, including colleges, schools, traffic lights, traffic environment, and driving conditions. The route input to the GPS can be output through voice and touch-screen patterns for users [8]. Each search provides a set of new and up-to-date information to the user. Thus, it is possible to compile all possible route information. Through subsequent retention, information is learned and processed and stored in the memory. In terms of route information, researchers have proposed a concept for vehicles that is similar to how humans recall past experiences from memory and make better decisions based on them. The computer in the car retrieves previous road information using semantic memory and makes better decisions. This develops the knowledge base of vehicles; however, the evolution of such knowledge requires time and typically depends on the vehicles [9].
SVMs are a group of methods for monitoring information relevant to learning. They are used for training and testing. They belong to the family of biased linear classification. Moreover, SVMs reduce the experimental classification error and improve the destination accuracy, which is their unique property. Therefore, through SVMs, calls for maximum margin classifiers are issued. SVMs also focus on reducing the systemic risk [10]. Consequently, a user typically needs to perform complete cross-validation to detect the environment with the maximum parameters. This technique is generally called the collection of prototypes. A practical issue in model selection is that this process is time consuming. The proposed system manipulates an extensive range of variables that influence the outcomes associated with the SVM algorithm. These parameters include the set of kernel functions, the standard deviation of the Gaussian kernel, the corresponding positions associated with the labeled slack variables to counteract the uneven distribution of the labeled results, and the number of instances of training [11].
Vehicles are essential to humans for traveling from one location to another. Many approaches and strategies have been adopted to enhance and automate transportation. In addition, various apps are available for finding the optimal path from one’s location to one’s destination. This topic has attracted considerable attention. Therefore, a system is developed to automate vehicles and provide them with self-decision capability. Through self-decision, human users feel more comfortable because the vehicles themselves are responsible for finding the route. Although various methods are used to automate cars, the methodology used in the proposed system has not been adopted previously. This system aims to improve user convenience and enhance transportation systems. The vehicles select the best route. A network of vehicles is established, and resource coordination and allocation are achieved via Mode 4 communication. The vehicles function as the network nodes, and the paths are stored in the cognitive memory. Both previous and new routes are stored in the cognitive memory so that the vehicle can easily select the best route. SVM algorithms are employed to obtain the results, and the proposed system shows excellent performance.
VANETs constitute a fascinating research area with a wide range of useful and essential applications, including security programs. Most of these applications require each vehicle to know its current location in real time. The most prevalent positioning strategy for VANETs is GPS. However, this strategy is invalid when GPS signals cannot be obtained in certain locations, such as caves, underwater areas, or adjacent tall buildings. As such, at these sites, no positioning service can be accessed even with high-precision information provided by differential GPS (DGPS). In this study, we propose positioning techniques that can provide precise positioning services in areas where GPS signals are disrupted. Experimental studies have demonstrated a significant increase in the positioning accuracy. When combined with DGPS, continuity in the exact positioning services used by most VANET applications can be achieved. Sufficient accuracy has been achieved in 95% of all the readings [12].
Many recent studies have focused on the Mode 4 algorithm by implementing different resource allocation schemes in the literature. The authors proposed a device-level evaluation for LTE-V2 V for decentralized programming of the Mode 4 algorithm in an urban environment. When using the SBSPS protocol, the aim is to detect several transmission errors. In general, vehicular networks present an intangible hidden node problem with increasing distance from the transceiver. The adaptive transmission scheme has been proposed to change the module level by targeting vehicle data rates [13].
Researchers have focused on setting the transmission power to ensure that the power level limits are met. To investigate the performance of SBSPS, an open-source simulator implemented in NS3 with optimized SBSPS parameters has been implemented. However, it does not consider the strength of the transmission. Device-level simulation analysis has been performed for the physical and MAC layer parameters; however, the transmission power control function has not been examined. An SBSPS power adaptation algorithm has been proposed based on the traffic intensity, in which the system capacity was set to 23 or 10. The scope of this method is limited to highway scenarios, and the optimization of the SBSPS parameters has been left for future research. Several recent studies have been conducted for the performance improvement of CV2X Mode 4; however, they have all been restricted to fundamental performance indicators, one or more parameters, and traffic situations. To the best of our knowledge, the TPC mechanism for CV2X Mode 4 has not been thoroughly investigated thus far, and it may provide a significant means for improving efficiency [14].
Using appleton, researchers have measured the efficiency of Mode 4, and they have concluded that Mode 4 is better than IEEE 802.11p. Traffic accidents have been studied in platoon terms. The friction coefficient between platoon vehicles is smaller than that in the case of collision warning systems (CWSs). The use of Mode 4 in CWSs was the subject of our previous study. To address the problem of Mode 4 congestion, the notion of non-orthogonal multiple access (NOMA) has been proposed. The operation of the slot selection system of Mode 4 has been investigated. However, our previous study did not cover the feasibility of Mode 4 in different crash scenarios, as earlier work focused on evaluating communication networks in CWS [15].
Cognitive modeling is essential for a machine to have cognitive capacity, and a model that covers human vision, memory, and vision is an innovative model for self-driving cars. To improve the productivity of scientific agents, scientists must use permanent memory in the future. Imagining the relationship between the mind and the body from a scientific point of view facilitates the analysis of theories required for different domains to establish successful AI systems. For example, cognitive factors such as the perception of moving right or left, darkness, glare due to bright light, imminent vehicle forecasting, vision, and reaction time during a mishap should be considered by vehicle drivers in order to avoid accidents [16].
GPS errors are automatically linked temporarily; errors found in GPS points can improve the accuracy of forward-moving GPS points. Thus, the probability of finding the suitable class is increased by map-matching algorithms. The capability of a software-based approach to enhance the horizontal accuracy of GPS points in order to increase the percentage of correct class recognition has been validated. Although the proposed solution might not be as successful as the DGPS or similar approaches that require additional resources, it is advantageous in that no additional hardware or external data is required. Nevertheless, there remains scope to improve the accuracy of GPS points and mapping algorithms. As shown in the article on ANN integration, where continuous training is performed by the algorithms found in the map, the horizontal error for GPS points can be predicted. The map-matching algorithm increases the percentage of correctly defined classes from 94.95% to 96.22% and reduces the overall calculation time by 15% [17].
The research community is developing new communication protocols for VANETs despite the lack of functional testbeds and other limitations. In reality, in new innovative applications, ranging from community-based projects to street pollution control and entertainment media such as online gaming, communication between vehicles can be useful to some degree. Moreover, ‘, in addition to pre-existing entities (e.g., mobile, Internet, and cellular networks), platoon vehicles can provide a dynamic communication infrastructure, which can protect the vehicles from various accidents, and also provide additional advantages such as shutting down the power grid (in the event of earthquakes, hurricanes, terrorist attacks, etc.). In summary, vehicular networks remain a research hotspot despite the lack of comprehensive experimental findings on successful architectures. Any tangible progress in this field is expected to be inspired by the general public, and the mass media also reflect this fact [18,19].
The main contributions of the proposed SVM-CV2X-M4 system are as follows:
a. vehicle route optimization;
b. mitigation of the miss rate for the optimal path of the VANET;
c. providing vehicles with the capability to select the optimal route using Mode 4 communication.
Finally, we compare the proposed SVM-CV2X-M4 system with other existing approaches [2,12,17]. In addition, the SVM-CV2X-M4 system is evaluated on a feature-based route optimization dataset.
The proposed approach involves training and validation phases, and cognitive memory communication occurs in both phases. The training phase is further divided into three main layers. First, the data acquisition layer accomplishes real-time data acquisition. It uses sensors as well as the Internet of things and artificial inspection. The remaining two layers are the data processing layer and application training layer. Sensors acquire environmental data through wireless networking. The connection may encounter noise, technical problems, or breakdowns. Hence, some sensors cannot convey data. At this stage, missing values occur, and the raw data are recovered through pre-processing techniques. The proposed model handles the missing values in the data pre-processing layer using different techniques such as moving-average methods and normalization.
At the end of data pre-processing, the application training layer is enabled. In addition, the system training layer is divided into two sub-layers: the prediction layer and the layer for the performance of different statistical parameters. The SVM algorithm is a robust algorithm used for classification. In the proposed model, the SVM algorithm is used in the prediction layer. The output layer estimates the precision and miss rate for the trained model. To reach a certain threshold, the learning parameters are evaluated, as shown in Fig. 1. The predictive layer is retrieved before the learning needs are met. Otherwise, the model needs to be retrained and stored in the cloud. After the training period, the validation process starts. The data acquisition and intelligent prediction layers are further divided into two layers in the verification process. Similarly, in data acquisition, the IoT creates and transmits devices to intelligent forecasting models that transmit environmental data. The proposed model imports the trained model from the cognitive memory for intelligent prediction. If the root is optimal, then the recommended path is followed; otherwise, it is discarded.
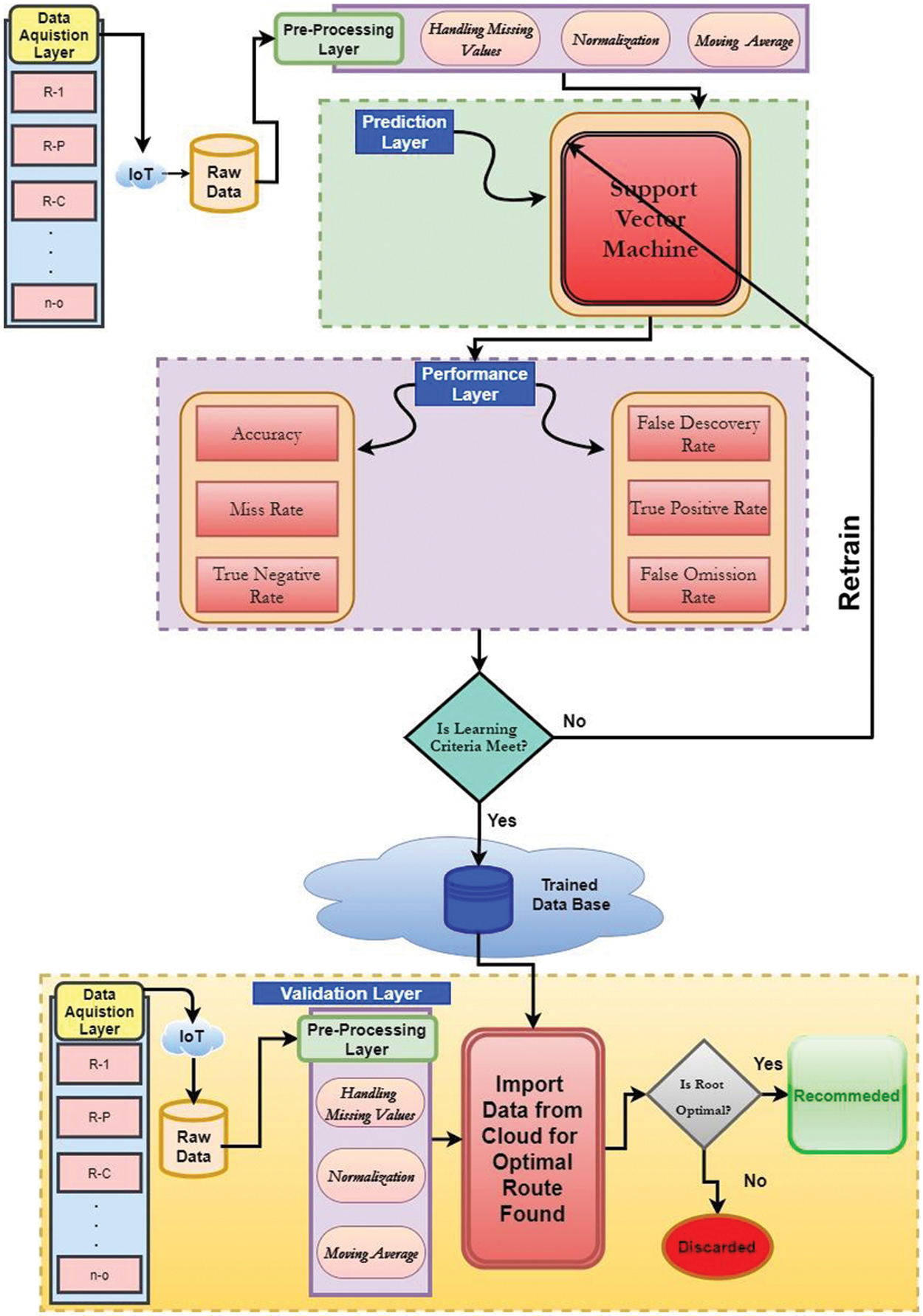
Figure 1: Proposed SVM-CV2X-M4 system
This approach is efficient on datasets with various attributes, such as financial or medical details. Moreover, it is effective in cases where the number of features is greater than the number of data points. To achieve memory efficiency, a subset of training points called support vectors is used in the decision function. Various kernel functions can be defined for the decision function. Although regular kernels can be used, it is also possible to specify custom kernels.
The line equation is expressed as
where q is the slope and s is the intercept. Thus,
Let
The equation is obtained from vectors in two dimensions. Eq. (2) is the general equation of the hyperplane and is also applicable to higher dimensions.
The direction of a vector
where
As is well known,
Eq. (3) can be rewritten as
Let
If sin (u) > 0 is properly classified and if sin (u) < 0 is wrongly classified, then the proposed system measures f on a training dataset, given a dataset D:
Then, U, which is called the functional margin of the dataset, is expressed as
The hyperplane with the largest U will be chosen, where U denotes the geometrical margin of the dataset. The primary objective is to consider the optimal hyperplane, which involves finding the corresponding values of
The Lagrangian function is expressed by the following equation:
After substituting the Lagrangian function
Thus,
subject to
The Lagrangian multiplier method can be extended to the Karush–Kuhn–Tucker conditions method; the constraints will be disproportionate. The Karush–Kuhn–Tucker conditions can be expressed as
where
Hence,
These are called support vectors, which are the closest points to the hyperplane. According to the Eq. (10),
To compute the value of y, we have
Multiplying both sides of Eq. (12) by m, we get
where
Then,
The number of support vectors is A for the hyperplane. A hyperplane is used to make predictions. The hypothesis function is as follows:
The above point on the hyperplane will be classified as class 1 (optimal route found) and the point below the hyperplane will be classified as 0 (optimal route not found). The objective of the SVM algorithm is to find a hyperplane that can separate the data accurately, and we need to find the best one, which is often referred to as the optimal hyperplane. A hyperplane in an n-dimensional Euclidean space is a flat, n-1-dimensional subset of space with two disconnected sections. In two dimensions, the SVM algorithm allows the dividing line to be the hyperplane. Similarly, a two-dimensional plane divides a 3D space into two three-dimensional components and thus acts as a hyperplane. For a space of n dimensions, the proposed methodology has a hyperplane of n-1 dimensions that divides it into two parts.
The proposed model was implemented in MATLAB. The dataset includes 20112 samples that are identified by the SVM algorithms. The model is evaluated using several statistical parameters, including the accuracy, miss rate, true positive rate (TPR), true negative rate (TNR), false positive rate (FPR), false negative rate (FNR), positive predictive value (PPV), negative predictive value (NPV), false omission rate (FOR), and false discovery rate (FDR). These parameters can be expressed as
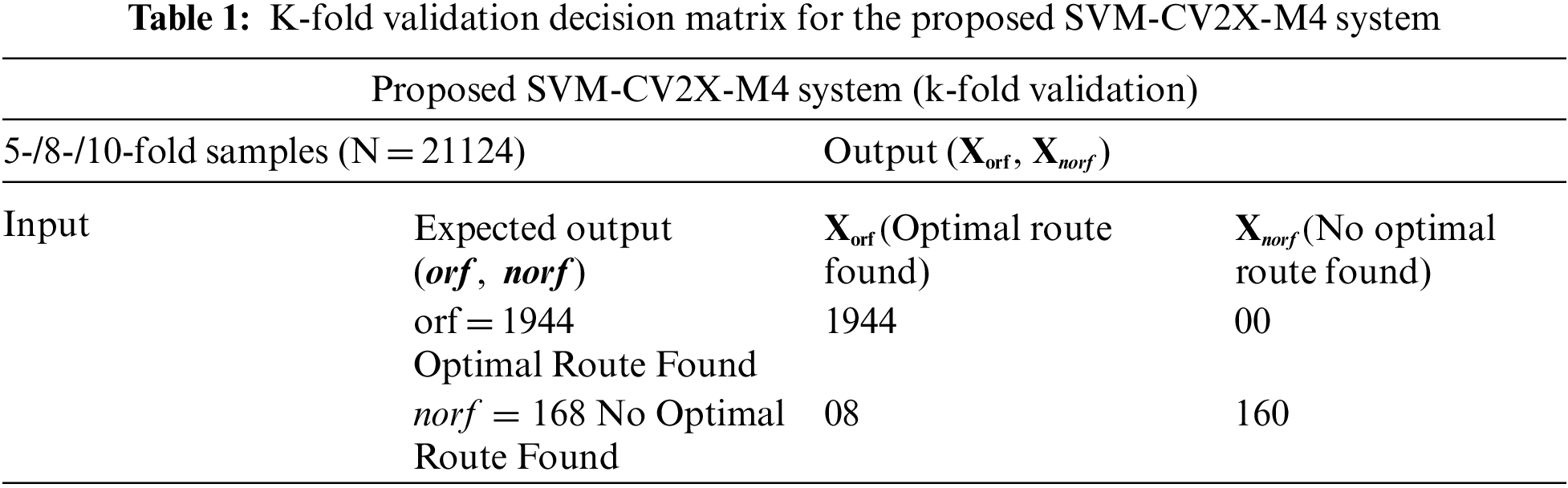
The k-fold method was used to obtain the results of the proposed SVM-CV2X-M4 system, as shown in Tab. 1. The validation phase consisted of two parts. In the first part, 1944 values were taken, an all values could truly find the optimal route, i.e., 0 values found the wrong route. Similarly, for no optimal route found, 168 instances were taken, and the proposed model predicted 160 correctly, representing no optimal route found, and 8 were mispredicted.
The Kaggle dataset was used to analyze the accuracy of the proposed SVM-CV2X-M4 system (see Fig. 2). It can be seen that the SVM model predicted the result accurately after applying the k-fold method to the dataset. Different values of k (5, 8, and 10) were used, and the same accuracy was achieved. The accuracy of the SVM-CV2X-M4 system was 99.6% and the miss rate was 0.4%.
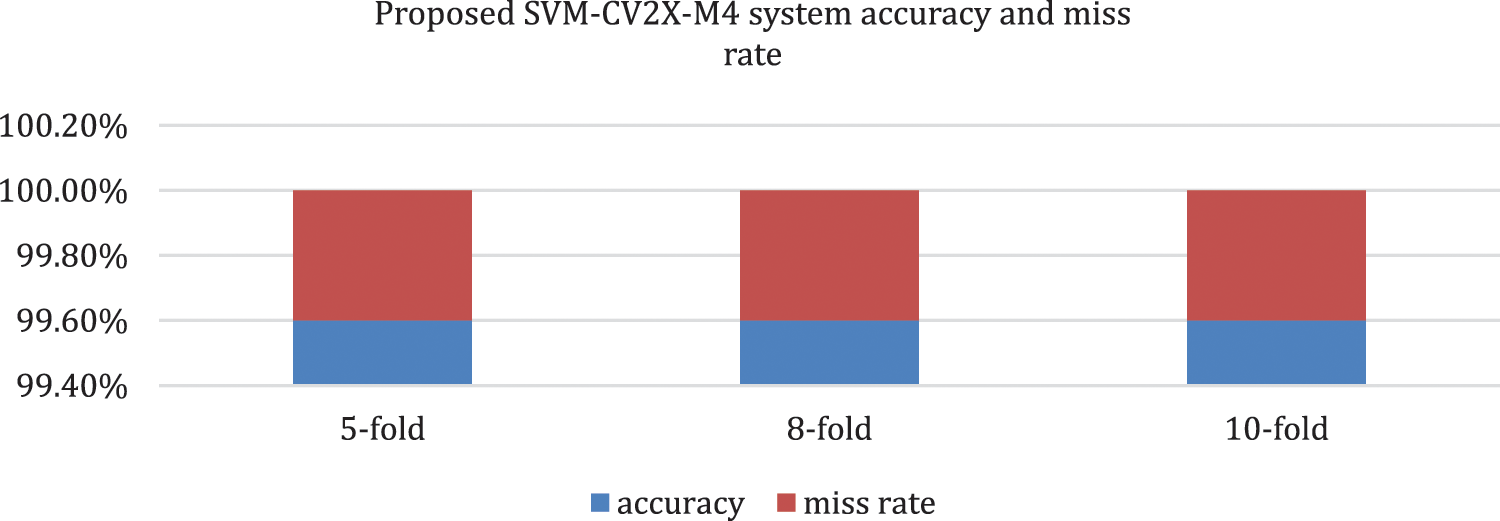
Figure 2: Accuracy of 5-, 8-, and 10-fold validation for the proposed SVM-CV2X-M4 system
Fig. 3 shows a comparison where different statistical parameters are considered for evaluating the performance of the proposed model. The proposed SVM-CV2X-M4 system achieved an accuracy of 99.6%. The miss rate was 0.40%, true positive rate was 99.59%, true negative rate was 100%, false positive rate was 0%, false negative rate was 0.40%, positive predicted value was 100%, negative predicted value was 92.3%, false omission rate was 0.40%, and false discovery rate was 0%.
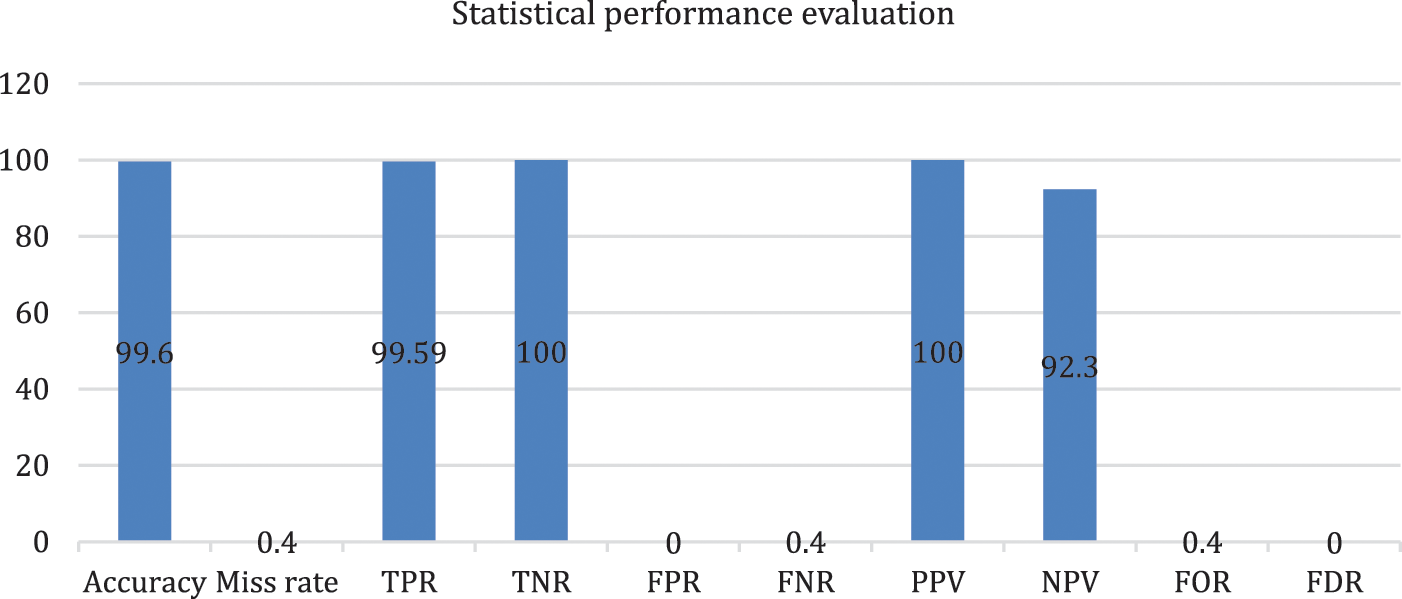
Figure 3: Statistical performance evaluation of the proposed SVM-CV2X-M4 system
Jain et al. [12] proposed an accurate positioning system for vehicles and achieved an accuracy of 95%. Carvalho et al. [17] used the map-matching algorithm for positioning vehicles and achieved an accuracy of 94.95%. The proposed SVM-CV2X-M4 system uses SVM algorithms to enable vehicles to choose the best path. Thus, it achieves an accuracy of 99.6%, as shown in Fig. 4.
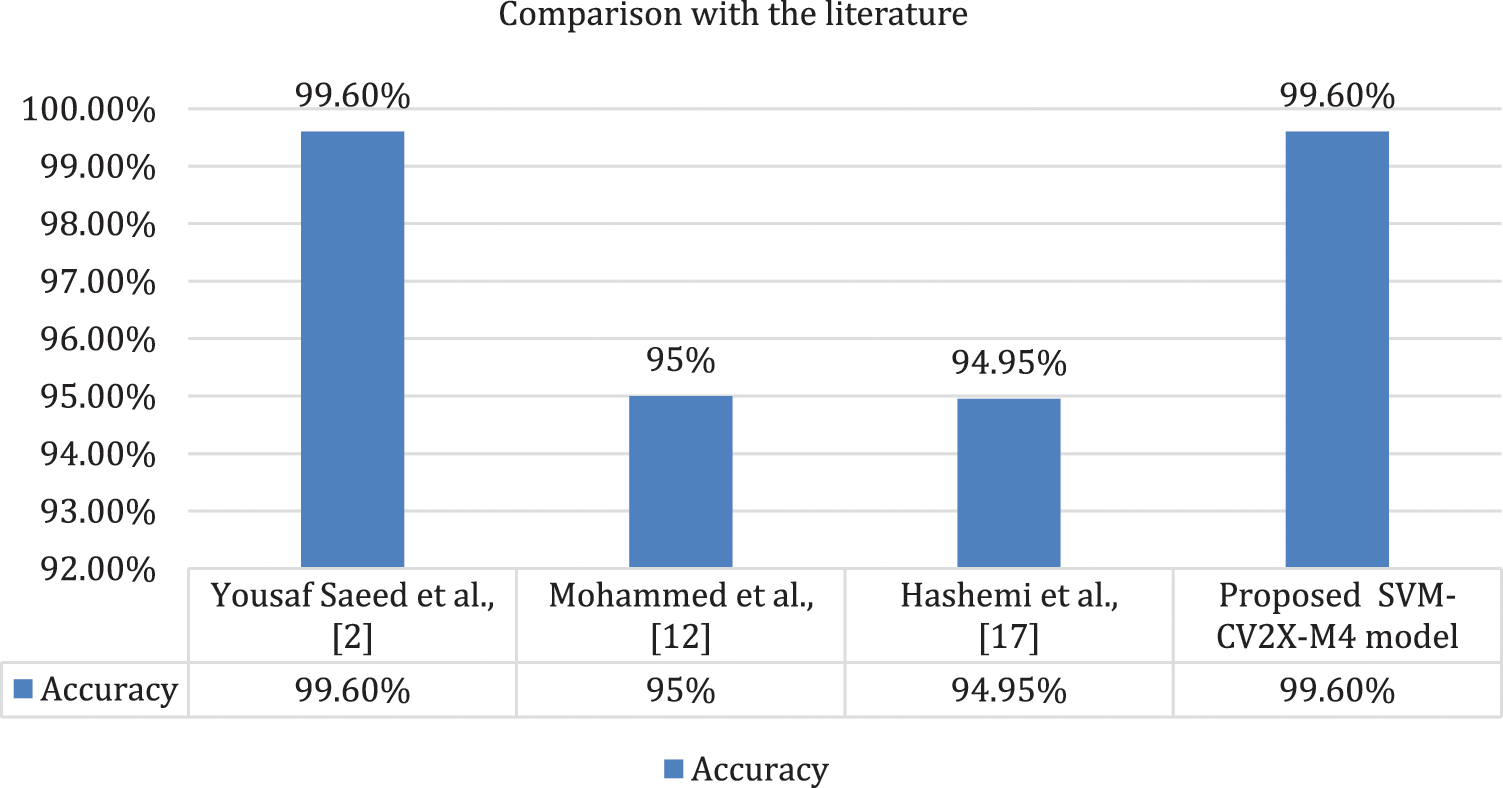
Figure 4: Comparison with the literature
VANET is a technology for developing a mobile network that uses and transfers vehicles as network nodes. A VANET is essentially a mobile ad-hoc network (MANET). VANETs allows all the nodes to communicate and connect with one another. One of the main requirements of a transport network is to provide the VANET vehicles with self-decision capability. The VANET is a mobile network creation technique that uses vehicles as network nodes and transfers them. Furthermore, it enables all the nodes to collaborate and interact with one another. The patterns of routes in the VANET are retained through cognitive memory, which stores all the previous paths. Thus, vehicles can select the best route. SVM algorithms provided the best results; an accuracy rate of 99.6% was achieved by applying different methods. The k-fold method with different values of k (5, 8, and 10) was applied to the data, for which the same results were obtained. Thus, the proposed SVM-CV2X-M4 system achieves accurate results. Therefore, the vehicles can self-decide their optimal route. Through different techniques and algorithms, the proposed system is successful and is easy to use. The purpose of the proposed SVM-CV2X-M4 system is to support users and facilitate transportation.
Acknowledgement: We thank our families and colleagues for their moral support.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. B. Zeeb, Q. Kong, J. Xia and E. Chang, “Development of landmark based routing system for in-car GPS navigation,” in IEEE Int. Conf. on Digital Ecosystems and Technologies, Stanford, California, USA, vol. 2, no. 6, pp. 132–136, 2013. [Google Scholar]
2. Y. Saeed, K. Ahmed, M. Lohi, S. Abbas and A. Athar, “Impact of cognition on user authentication scheme in vehicle using fuzzy logic and artificial neural network,” International Journal of Computer Science and Information Security, vol. 14, no. 10, pp. 285–297, 2016. [Google Scholar]
3. A. Haider and S. H. Hwang, “Adaptive transmit power control algorithm for sensing-based semi-persistent scheduling in C-V2X mode 4 communication,” Electronics, vol. 8, no. 8, pp. 846–852, 2019. [Google Scholar]
4. H. Abdi, “A generalized approach for connectionist auto-associative memories: Interpretation, implications and illustration for face processing,” Artificial Intelligence and Cognitive Sciences, vol. 6, no. 3, pp. 149–164, 2013. [Google Scholar]
5. S. Chen, S. Zhang, J. Shang, B. Chen and N. Zheng, “Brain-inspired cognitive model with attention for self-driving cars,” IEEE Transactions on Cognitive and Developmental Systems, vol. 11, no. 1, pp. 13–25, 2017. [Google Scholar]
6. V. Le, Z. Feng, D. Bourse and P. Zhang, “A cell based dynamic spectrum management scheme with interference mitigation for cognitive networks,” Wireless Personal Communications, vol. 49, no. 2, pp. 275–293, 2009. [Google Scholar]
7. H. Hasrouny, A. E. Samhat, C. Bassil and A. Laouiti, “VANet security challenges and solutions: A survey,” Vehicular Communications, vol. 7, no. 3, pp. 7–20, 2017. [Google Scholar]
8. Z. Liu, “A new approach for cycle slip detection and fix using single GPS receiver’s single satellite dual frequency data containing arbitrarily large pseudorange errors,” The Journal of Global Positioning Systems, vol. 16, no. 1, pp. 1–21, 2018. [Google Scholar]
9. M. Serrão, J. M. Rodrigues and J. H. D. Buf, “Navigation framework using visual landmarks and a GIS,” Procedia Computer Science, vol. 27, no. 2, pp. 28–37, 2014. [Google Scholar]
10. Y. C. Du and A. Stephanus, “Levenberg-marquardt neural network algorithm for degree of arteriovenous fistula stenosis classification using a dual optical photoplethysmography sensor,” Sensors, vol. 18, no. 7, pp. 2322–2328, 2018. [Google Scholar]
11. Y. Zhang, Y. Wang, G. Zhou, J. Jin, B. Wang et al., “Multi-kernel extreme learning machine for EEG classification in brain-computer interfaces,” Expert Systems with Applications, vol. 96, no. 3, pp. 302–310, 2018. [Google Scholar]
12. V. Jain, A. Merchant, S. Roy and J. B. Ford, “Developing an emic scale to measure ad-evoked nostalgia in a collectivist emerging market,” Journal of Business Research, vol. 99, no. 8, pp. 140–156, 2019. [Google Scholar]
13. S. A. E. Mohamed, A. Nasr and G. A. Ansari, “Precise positioning systems for vehicular ad-hoc networks,” Arxiv, vol. 3, no. 1, pp. 1205–1633, 2012. [Google Scholar]
14. A. Horzyk, J. A. Starzyk and J. Graham, “Integration of semantic and episodic memories,” IEEE Transactions on Neural Networks and Learning Systems, vol. 28, no. 12, pp. 3084–3095, 2017. [Google Scholar]
15. B. Kang, S. Jung and S. Bahk, “Sensing-based power adaptation for cellular V2X mode 4,” IEEE International Symposium on Dynamic Spectrum Access Networks, vol. 2, no. 1, pp. 1–4, 2018. [Google Scholar]
16. V. Bianchi, P. Ciampolini and I. D. Munari, “RSSI-based indoor localization and identification for ZigBee wireless sensor networks in smart homes,” IEEE Transactions on Instrumentation and Measurement, vol. 68, no. 2, pp. 566–575, 2018. [Google Scholar]
17. L. L. Carvalho, D. J. Pereira and S. A. Coelho, “Origins and evolution of enactive cognitive science: Toward an enactive cognitive architecture,” Biologically Inspired Cognitive Architectures, vol. 16, no. 1, pp. 169–178, 2016. [Google Scholar]
18. M. Hashemi and H. A. Karimi, “A machine learning approach to improve the accuracy of GPS-based map-matching algorithms,” International Conference on Information Reuse and Integration, vol. 3, no. 1, pp. 77–86, 2016. [Google Scholar]
19. R. Karimi and S. Shokrollahi, “PGRP: A predictive geographic routing protocol for vanets,” Computer Networks, vol. 141, no. 7, pp. 67–81, 2018. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |