DOI:10.32604/cmc.2022.026066
| Computers, Materials & Continua DOI:10.32604/cmc.2022.026066 | |
| Article |
Sustainable Energy Management with Traffic Prediction Strategy for Autonomous Vehicle Systems
1Department of Computer and Self Development, Preparatory Year Deanship, Prince Sattam bin Abdulaziz University, AlKharj, Saudi Arabia
2Department of Computer Engineering, College of Computers and Information Technology, Taif University, Taif, 21944, Saudi Arabia
3Department of Industrial Engineering, College of Engineering at Alqunfudah, Umm Al-Qura University, Saudi Arabia
4Department of Computer Science, College of Science & Art at Mahayil, King Khalid University, Saudi Arabia
*Corresponding Author: Manar Ahmed Hamza. Email: Ma.hamza@psau.edu.sa
Received: 14 December 2021; Accepted: 21 February 2022
Abstract: Recent advancements of the intelligent transportation system (ITS) provide an effective way of improving the overall efficiency of the energy management strategy (EMSs) for autonomous vehicles (AVs). The use of AVs possesses many advantages such as congestion control, accident prevention, and etc. However, energy management and traffic flow prediction (TFP) still remains a challenging problem in AVs. The complexity and uncertainties of driving situations adequately affect the outcome of the designed EMSs. In this view, this paper presents novel sustainable energy management with traffic flow prediction strategy (SEM-TPS) for AVs. The SEM-TPS technique applies type II fuzzy logic system (T2FLS) energy management scheme to accomplish the desired engine torque based on distinct parameters. In addition, the membership functions of the T2FLS scheme are chosen optimally using the barnacles mating optimizer (BMO). For accurate TFP, the bidirectional gated recurrent neural network (Bi-GRNN) model is used in AVs. A comprehensive experimental validation process is performed and the results are inspected with respect to several evaluation metrics. The experimental outcomes highlighted the supreme performance of the SEM-TPS technique over the recent state of art approaches.
Keywords: Sustainable energy; transportation; energy management; traffic flow prediction; soft computing; deep learning
An Autonomous Vehicle (AV) is called a vehicle which could manoeuvre automatically without human interference. They are employed with the purpose of (i) avoiding crashes, (ii) enhancing road safety, (iii) new potential market opportunities, and (iv) releasing driver time and business opportunities [1]. In order to discover map, localization, tracking for itself, and path learning, AV requires mobile navigation tools onboard. Estimation, Sensor fusion, and software accuracy are key elements of AV mobility [2]. Smart EMSs could observe or sense and learn vehicle conditions, drivers’ behaviour, and environmental to manage the process of the vehicle independently to reduce the energy consumption of the vehicles and hence its greenhouse gas emission. Several studies have been performed to enhance the fuel economy for reducing the energy consumption and Hybrid Electric Vehicles (HEVs) and Internal Combustion Engine (ICE) of traditional vehicles. In this research, they focus on enhancing the energy efficacy of a conventional autonomous vehicle (CAV). Reference [3] presented an energy management method that has been utilized for producing and saving electrical energy at accurate times at the time of trip. The experimental result shows that the fuel utilization can be enhanced by 2% without utilizing the predictions for driving cycles. In other researches, [4] focused on using regenerative braking protocols for decreasing emission levels and fuel consumption. Using the presented approach, the alternator based energy of vehicle is controlled to preserve the torque of the engine in its high efficacy functional region that produced an enhancement in consumption of fuel. Reference [5] proposed a smart energy management technique for vehicles i.e., based on making decisions on partitioning the energy manually. With optimum methods for 2 processes, charging the battery and distributing the engine torque, the result shows that the energy consumption of the vehicle was reduced.
AVs are broadly expected to be conventional in the upcoming days, basically converting how human travels and revolutionizing the automobile related industry by making an effectual, effective, and safe interoperable wireless transmission network. In spite of the relative summary of AVs, there have been many researches in the works concentrating on modelling and understanding several features of AV involving significant progress and traffic flow have been previously introduced [6]. It appears to be consensus that the summary of AVs contain significant capacity as solution to these huge road transportation problems in the area of mobility, environment, and safety, also to eventually improve the quality of life and mobility. Particularly, AVs are predicted to have high safety limits compared to human drivers, low carbon emissions, and power consumption. Moreover, AVs are assumed to enhance traffic operation efficacy in several situations [7].
In brief, by placing traffic condition observing device using wireless transmission abilities in present traffic infrastructures [8], the real-time traffic condition data could be transmitted and collected to the appropriate traffic control agencies in a more accurate and timely manner, allowing the agencies for creating moderate replies depending on the real-time traffic flow of traffic scheme for improving traffic control measures for minimizing the likelihood of traffic congestion. Consequently, significant study works have been dedicated to ITS related systematic study, and a huge amount of ITS related approaches have been presented recently. In ITS, traffic prediction mostly focuses on 2 features: speed prediction and traffic volume prediction [9]. Since flow predictions are more instinctive to directly illustrate the possible traffic condition, it can be generally considered as a significant manner to assist traffic aware data dissemination, travel plan, traffic management, and so on. Specifically, by giving beneficial flow data earlier, users could evade peak volume and create smart travel ideas. There are mostly 2 kinds of methods are utilized for implementing short term flow predictions, machine learning (ML) based method and statistical model. For example for the statistical model, i.e., extensively utilized in previous days because of its well-rounded implementation experience and good model interpretability [10]. Alternatively, ML based methods are leading novel predictive trends nowadays, by using their strong computation ability and higher accuracy for big data.
This paper presents novel sustainable energy management with traffic flow prediction strategy (SEM-TPS) for AVs. The SEM-TPS technique aims to accomplish effectual energy management and traffic prediction process. It involves a type II fuzzy logic system (T2FLS) based EMS model to accomplish the desired engine torque based on distinct parameters. Also, the membership functions of the T2FLS scheme are chosen optimally using the barnacles mating optimizer (BMO). For accurate TFP, the bidirectional gated recurrent neural network (Bi-GRNN) model is used in AVs. A wide-ranging set of simulations are carried out to guarantee the enhanced performance of the SEM-TPS technique with respect to several evaluation metrics.
Ghasemi and Song [11] introduced a flexible power demand framework, in which they provide flexibility to driveline power demand hence the powertrain control doesn't have to accurately trace the power demand from the vehicle level. The emphasis of this summary is on a novel powertrain management technique which could efficiently leverage this flexibility. The optimization problems are resolved by Pontryagin's minimum principle. Phan et al. [12] study the EMS of a CAV, in an effort to improve its powertrain efficacy. The developed EMS including 2 NF schemes for producing an optimum torque of the engine.
Wan et al. [13] proposed a new CPS application for EMF towards AEV in smart grids. First, they provide a summary of related technology, includes enabling wireless transmission technology for CPS, open research issues of CPS, energy efficient design for AEV, AEV and path planning, smart grid, and so on. Later, they designed EMF from the succeeding factors like AEV charging stations, smart grid transmission framework for EMF, and AEV using WSN navigation. The presented EMF is can gather the real-time charging stations, energy usage conditions, and demand from AEV. Also, they addressed EMF for overcoming few problems like real-time traffic data. In Phan et al. [14], hybrid electric AVs are examined in substantial amounts of ambiguity and uncertainty in the driver behaviour and road environment. A Type 1 FL controller is built for addressing the uncertainty of driving conditions. The strategy includes constructing a smart energy management scheme for the hybrid electrical AV. They have also studied the potential of Interval Type 2 FS control, particularly for power utilization management.
Emami et al. [15] developed a Kalman filter to predict traffic flows at urban arterial depends on data attained from interconnected vehicles. The projected method is computationally effective and provides a realtime predictions because it invokes the interconnected vehicle data beforehand the predictions time. Furthermore, it could forecast the traffic flows for several penetration rates of interconnected vehicles (the ratio of several interconnected vehicles to the overall amount of vehicles). Initially, the Kalman filter equation is calibrated by data acquired from Vissim traffic simulators for distinct signal settings, penetration rate, and fluctuating arrival rate of vehicles. Later, the filter is calculated for different traffic situations made in Vissim simulators. Lee et al. [16] proposed a traffic control scheme on the basis of ML prediction and a routing technique that dynamically defines AVS routes with decreased congestion rates. They performed an investigational calculation for comparing the prediction efficiency of 4 common methods.
Song et al. [17] proposed an online rolling traffic flow predictive technique for providing a facility for the CAVs could be viewed into practice. The novel matrix factorization methods presented could learn the lower dimension embedding in the online setting and at the same time impute the lost one. Furthermore, rather than directly forecasting the higher dimension traffic flow data, a regular VAR method is applied on lower dimension embedding for predicting upcoming values. Moreover, a multi-dimension Cadzow technique is projected for solving the coefficient matrices of VAR effectively even though exists noise. Manne et al. [18] focus on the proposal of IEMTFP method for AVs utilizing multi-objective RWOA and DL approaches. The presented method includes an energy management model with FL method for reaching the stated engine torque regarding distinct methods. For an optimum tuning of the parameters included in the FS-MFs, RWOA is applied for reducing additional power consumption. As well, the presented method utilized a DL based Bi-LSTM method for performing TFP.
In Phan et al. [19], an energy management scheme is analyzed and constructed with the help of road power demand method and a smart system for reducing energy usage for a CAV. The road power demand method uses 3 influencing aspects (i) vehicle specifications (ii), environment conditions and (iii) driver behavior. The presented smart energy management system consists of an FL system for producing the desired engine torque, according to the vehicle road power demand, and a PID regulator for controlling the air or fuel ratio, by altering the throttle angle. Yang et al. [20] presented a new MPC architecture for energy optimum point-to-point movement control of an AUV. In this system, the energy management challenge of an AUV is recreated as a surge movement optimization issue in 2 phases. Firstly, system level energy minimization problems are resolved by handling the tradeoffs among the energies needed to overcome the surge drag force and positive buoyancy in static optimization. Second, an MPC using special cost function formulations is presented for managing system dynamics and transients. A switching logic to handle the transitions among the dynamic and static phases is integrated for reducing the computation work.
In this study, a new SEM-TPS technique is developed to accomplish effectual energy management and traffic prediction process in ITS. The SEM-TPS technique involves two major processes namely BMO-T2FLS technique based energy management and Bi-GRNN based TFP. Primarily, The SEM-TPS technique has presented a BMO-T2FLS technique to manage the available energy in the AVs and the choice of MFs of the T2FLS technique is performed using the BMO algorithm helps to significantly achieve improved energy management performance. Next, in the second stage, the Bi-GRNN technique is employed for the prediction of traffic flow in the AVs.
3.1 Design of Proposed EMS for AVs
In the first stage, the energy management process takes place using the BMO-T2FLS technique. The T2FLS connects input and output via various phases as shown in Fig. 1. The major variance in the Type 1 and 2 controllers is the output processing block. Other blocks are (1) a fuzzifier, (2) the KB, (3) the inference engine; and (4) the output processing block generates an individual value for type-1 FL controller and an interval for type-2 FL controller (in this latter instance, a novel block, “type reducer”, is utilized for obtaining the output) and (5) the defuzzifier. The reason for utilizing an interval type-2 FL could be summarised in the following [21]: (1) it is easy to develop fuzzy rule from natural language and experts knowledge since the membership grade of an IT2 is an interval rather than a crisp number, that raises the strength of the method, and (2) T2FLC is highly adoptive compared to type-1 fuzzy system because of the complicated relations among their outputs and inputs, i.e., major significance in system with higher level of uncertainties such as AV.
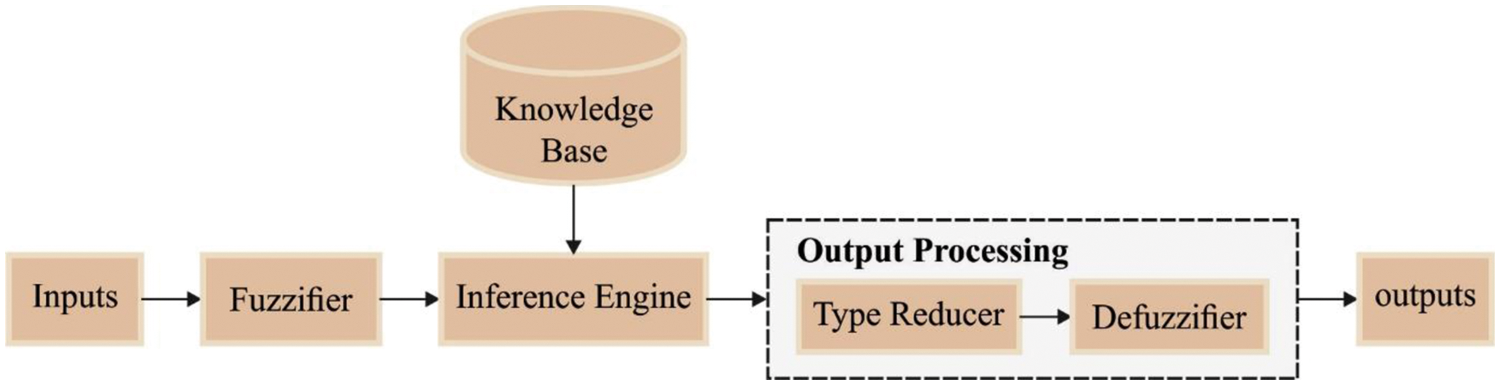
Figure 1: Process of T2FLS
Firstly, an FLS is employed to produce the essential engine torque depending upon road power demand of vehicles that have been processing. As stated before, it is applied due to robust processing, tedious systems, simple application of massive, simple implementation, etc. FLS is a technique that simulates the human mind. The road power demand is categorized into five classifications: High, PN, N, SN, and Low. The fuzzy rule is calculated for torque of engine in optimum area to enhance the energy performance. The engine torque is divided into 3 classes: PO, SO, O. The MF of inputs and outputs are produced. In the application of MF, a rule based method has emerged. Later, the PID controllers are employed to manage an ETC therefore engine torque employs required engine torque achieved using FLS. The PID controllers apply the variants amongst actual and desired torques as input. The theoretical (unique) A/F ratio, for whole combustions, is called as stoichiometric A/F ratio. An ETC is employed to change the air mass flows in engine cylinder for attaining efficient A/F ratio. Eq. (1) determine the PID regulators.
Whereas kp denotes the proportional, kD indicates derivative, and kI signifies the integral parameter. The signal e(t) represents differences between required and actual torques. The PID controllers are performed in MATLAB Simulink. The parameters kp, kD, kI are tuned to achieve optimum results.
The fuzzy MF should be evolved by a professional. Once it is modeled, the fuzzy systems offer an optimum result using energy consumption. At the same time, this study employs the BMO algorithm to find an optimal MF using the BWO algorithm.
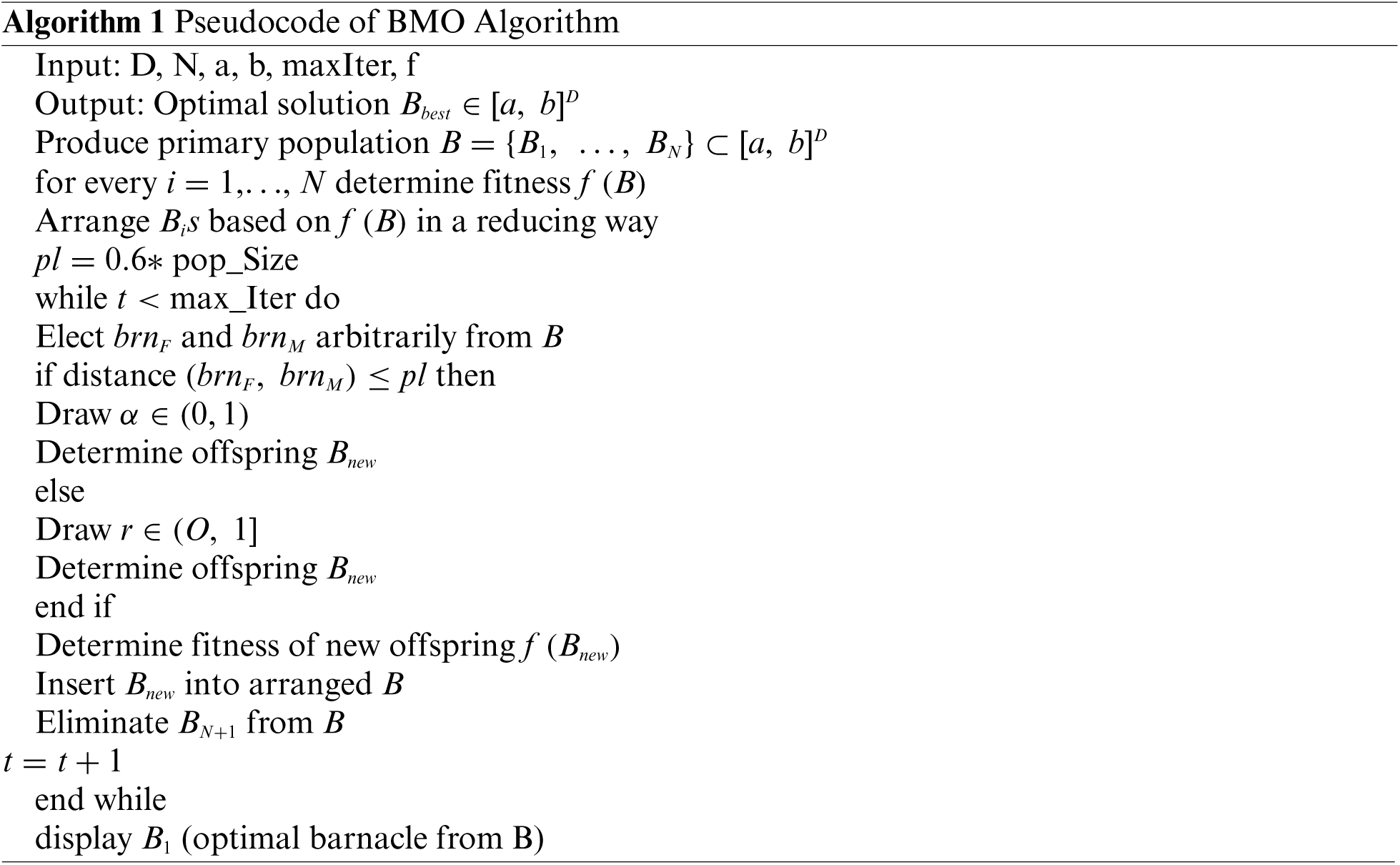
BMO [22] is an evolutionary method stimulated from micro-organisms known as barnacles that exist since Jurassic times. In BMO, the solutions are denoted as a barnacle, i.e., similar to a chromosome in GA and particle in PSO. Hence, an individual barnacle B is denoted as a
Now,
where r denotes a pseudo arbitrary amount from a uniform distribution of zero and one. Assume, the novel offspring are produced from the mother barnacle only by a sperm casting procedure. The value of
• The election procedure is performed arbitrarily however it would be constrained to the penis length of barnacle,
• All barnacles might contribute sperm and obtain sperm from others, and all barnacles could be fertilized by single barnacle at a time. This is shown in Eq. (2).
• When the election at the particular iteration is above the pl has fixed, ‘sperm cast’ procedure is taking place. The sperm cast procedure is shown in Eq. (3).
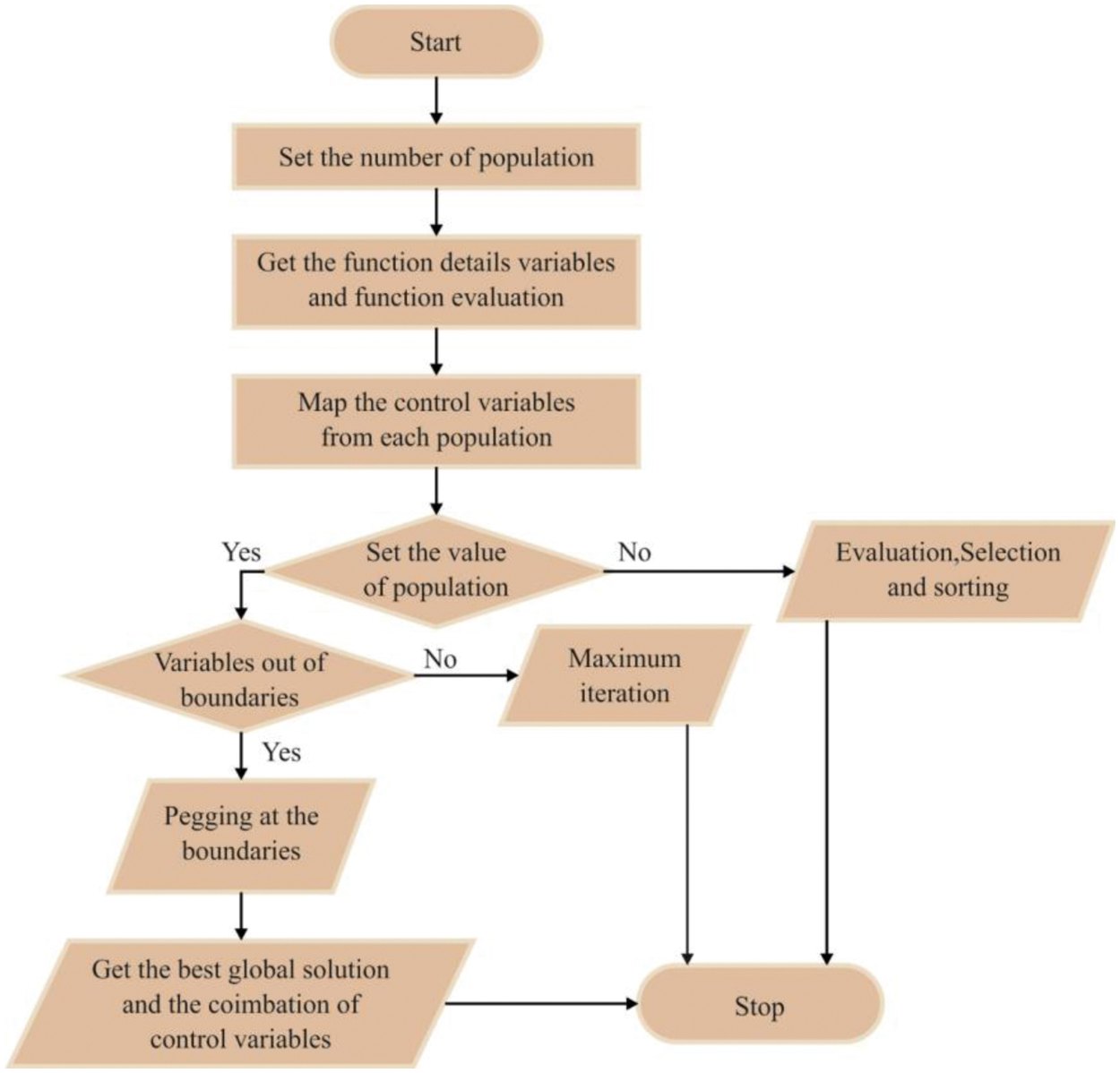
Figure 2: Flowchart of BMO algorithm
The Initial 2 assumption enforces the exploitation and the final assumptions ensure the exploration procedure as the novel offsprings are generated from mother.
3.2 Design of Proposed TFP for AVs
At this stage, the Bi-GRNN technique is derived to forecast the flow of traffic in the AVs. An RNN is a type of NN with a memory function i.e., convenient for series data modelling. But, traditional RNN experiences the issue of gradient disappearance and gradient explosion, also this algorithm could not manage long distance dependency problem. A GRU NN consists of, an update gate and reset gate. The reset gate defines amount of data that should be forgotten in the hidden state at the prior moment. If the values are close to one, then the hidden data at prior moment is preserved in the present storage. The update gate defines amount of information in the hidden state of prior moment that would be carried at the present hidden state. If the values are close to one, then the data is preserved in the present hidden state.
In
whereas
All the hidden layers in the NN has individual reset and update gates. The layer produces distinct dependent relations on the basis of present input data and the data from the prior moment. A Bi-GRNN is a GRU-NN improved by 2-layer structures. It provides the output layer with thorough contextual data of input data at each moment. The fundamental concept is that the input series is passing by a forward NN and a backward NN, later, the output of 2 is interconnected in the similar output layer Fig. 3 displays the 2 layers Bi-GRUNN.
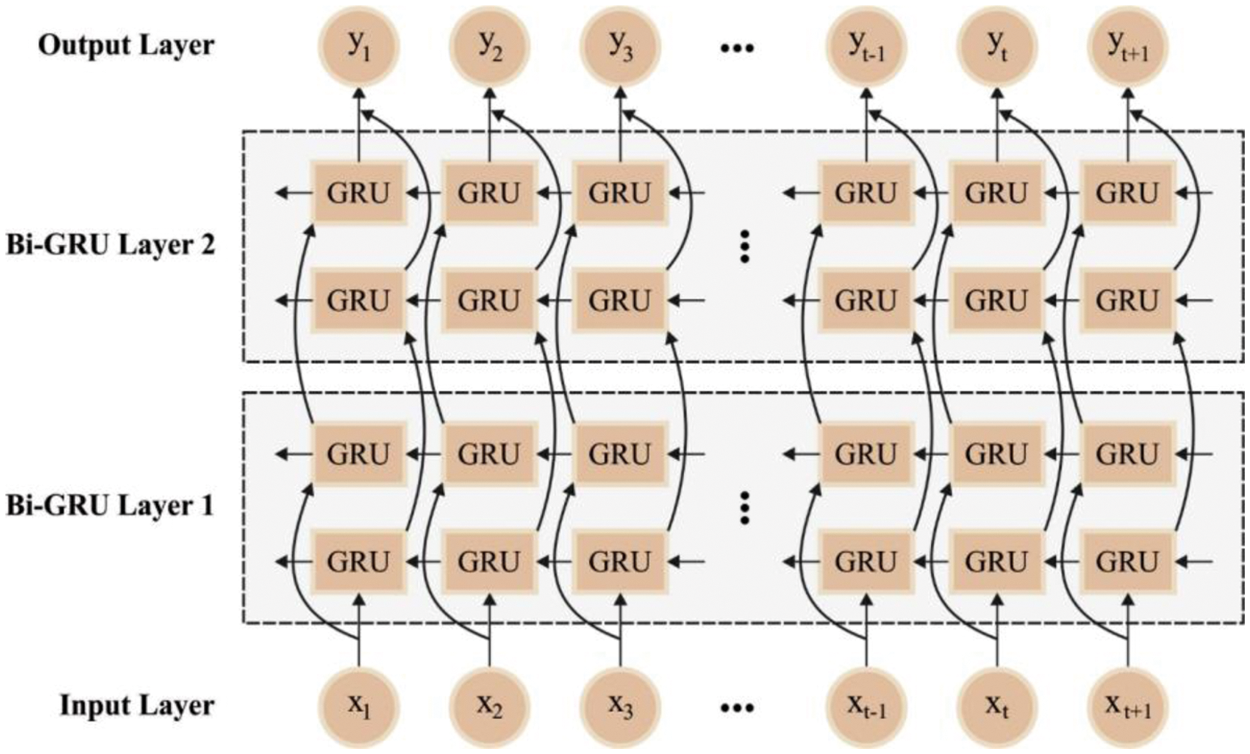
Figure 3: Framework of Bi-GRUNN
Amongst them, in the Bi-GRNN of all the layers, the forward layer computes the output of hidden layer at every time from forward to backward, and the backward layer computes the output of hidden layer at every time from backward to forward. The output layer normalizes and superimposes the output result of backward and forward layers at every moment:
whereas
This section validates the performance of the presented model in terms of energy management and TFP. Primarily, the energy management analysis of the BMO-T2FLS technique takes place in terms of fuel consumption in Tab. 1 and Fig. 4. The results are inspected under varying distances ranging from 10 to 100 Kms. The results portrayed that the BMO-T2FLS technique has gained effective outcomes with the least fuel consumption over the other techniques. For instance, with 10 kms, the BMO-T2FLS technique has attained a lower fuel consumption of 2.54 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA techniques have obtained a higher fuel consumption of 3.10, 2.95, 2.85, 2.80, and 2.70 respectively. In the same way, with 20 kms, the BMO-T2FLS approach has gained a minimum fuel consumption of 3.47 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA algorithms have attained a superior fuel consumption of 4.10, 3.85, 3.71, 3.61, and 3.56 correspondingly. In the meantime, with 40 kms, the BMO-T2FLS manner has obtained a lesser fuel consumption of 5.18 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA methods have obtained an improved fuel consumption of 5.82, 5.60, 5.37, 5.47, and 5.39 correspondingly. Eventually, with 80 kms, the BMO-T2FLS technique has attained the least fuel consumption of 8.75 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA methodologies have achieved maximal fuel consumption of 9.40, 9.13, 9.10, 9.21, and 9.11 correspondingly. Furthermore, with 100 kms, the BMO-T2FLS approach has reached a lower fuel consumption of 10.49 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA methods have gained an increased fuel consumption of 12.40, 11.50, 10.90, 11.20, and 10.70 correspondingly.
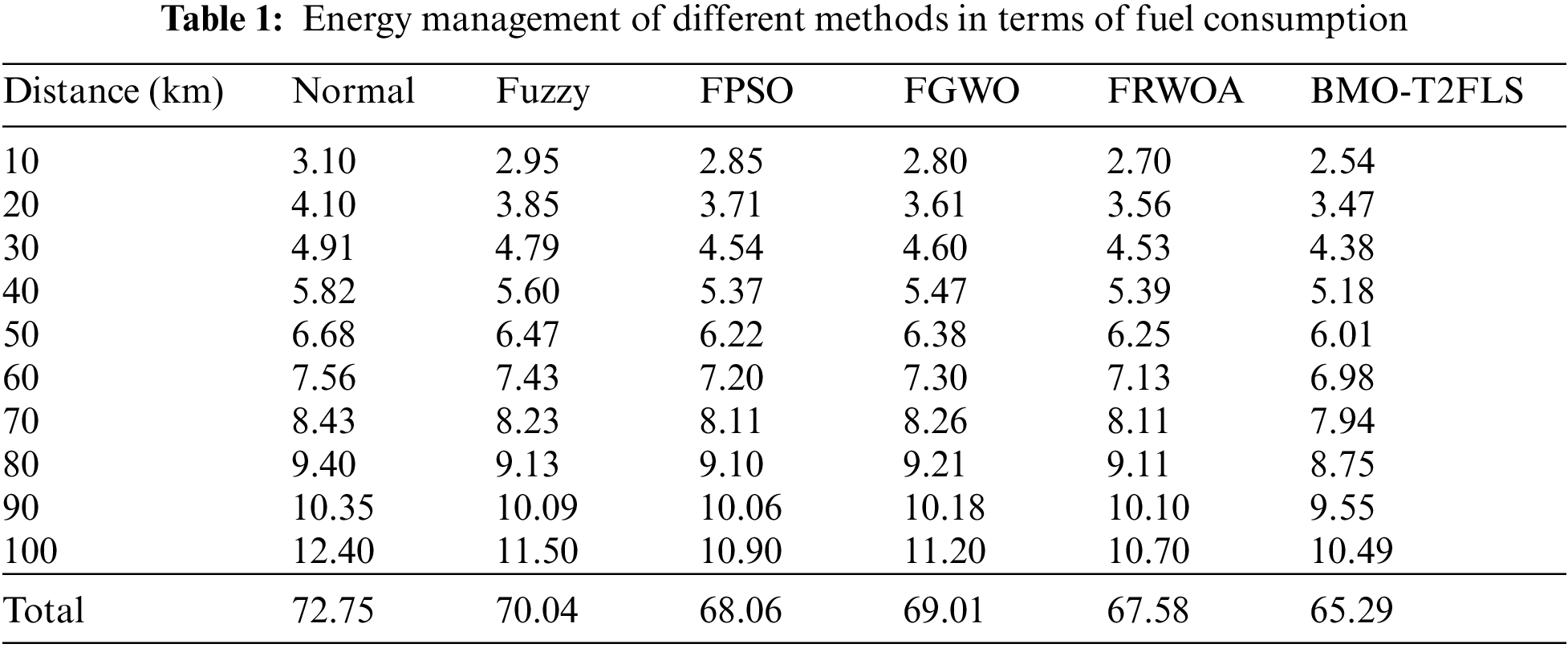
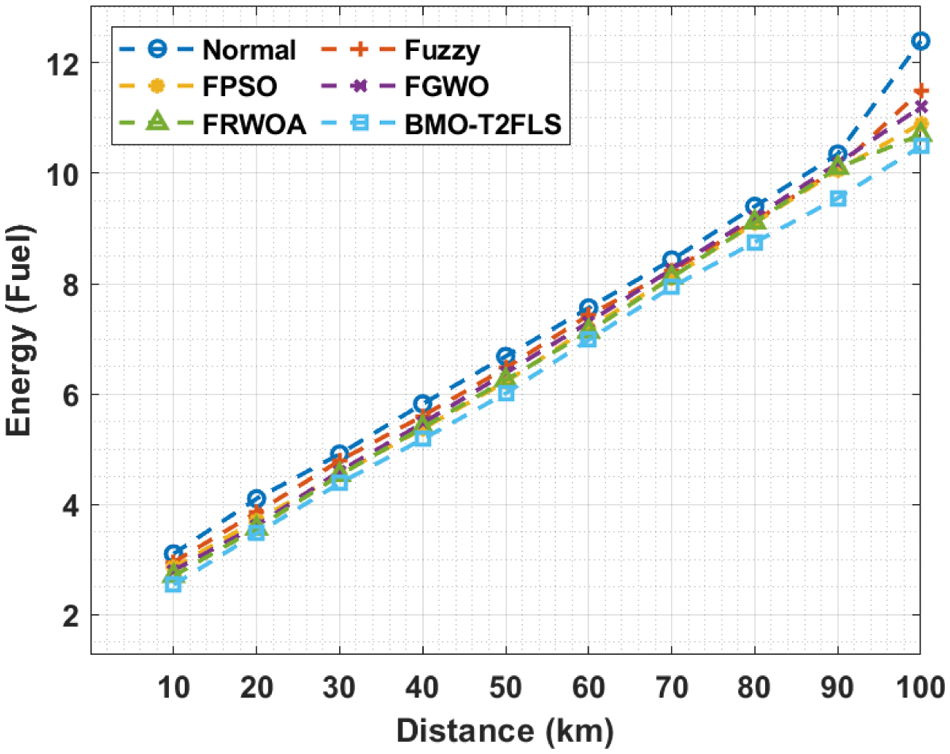
Figure 4: Result analysis of BMO-T2FLS model in terms of fuel consumption
An average fuel consumption analysis of the BMO-T2FLS technique with existing techniques is depicted in Fig. 5. From the figure, it is clearly demonstrated that the BMO-T2FLS technique has resulted in minimal average fuel consumption of 65.29 whereas the Normal, Fuzzy, FPSO, FGWO, and FRWOA techniques have got a maximum average fuel consumption of 72.75, 70.04, 68.06, 69.01, and 67.58 respectively. Therefore, the BMO-T2FLS technique is found to be an effective EMS for AVs.
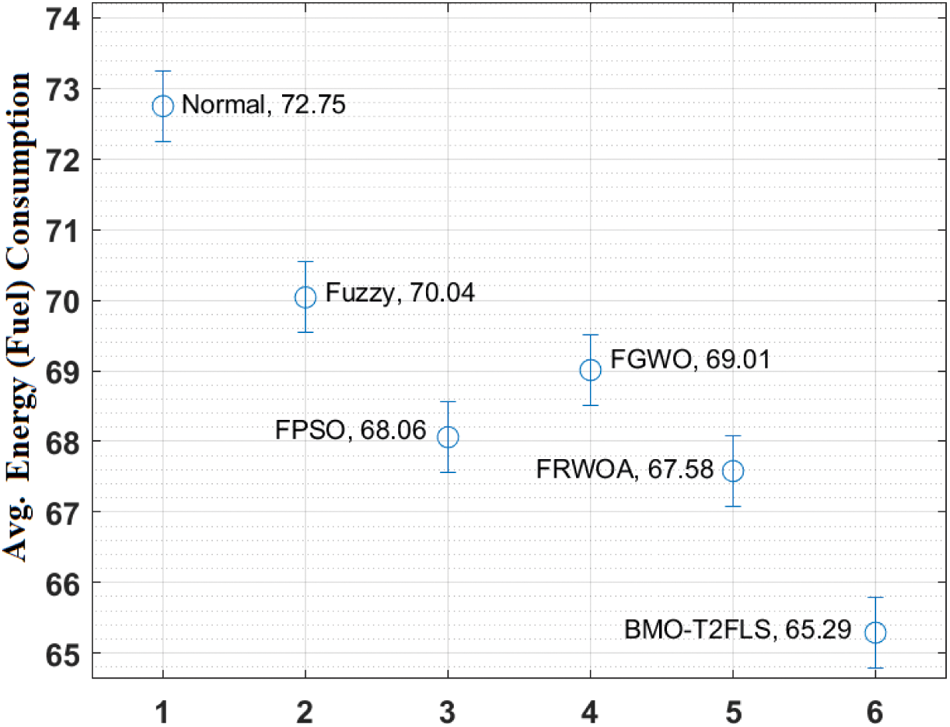
Figure 5: Average fuel consumption analysis of BMO-T2FLS model
Next, the TFP performance of the Bi-GRNN technique is examined in terms mean absolute percentage accuracy (MAPA), which is employed as an important accuracy metric to determine the predictive performance. It is given as follows.
where
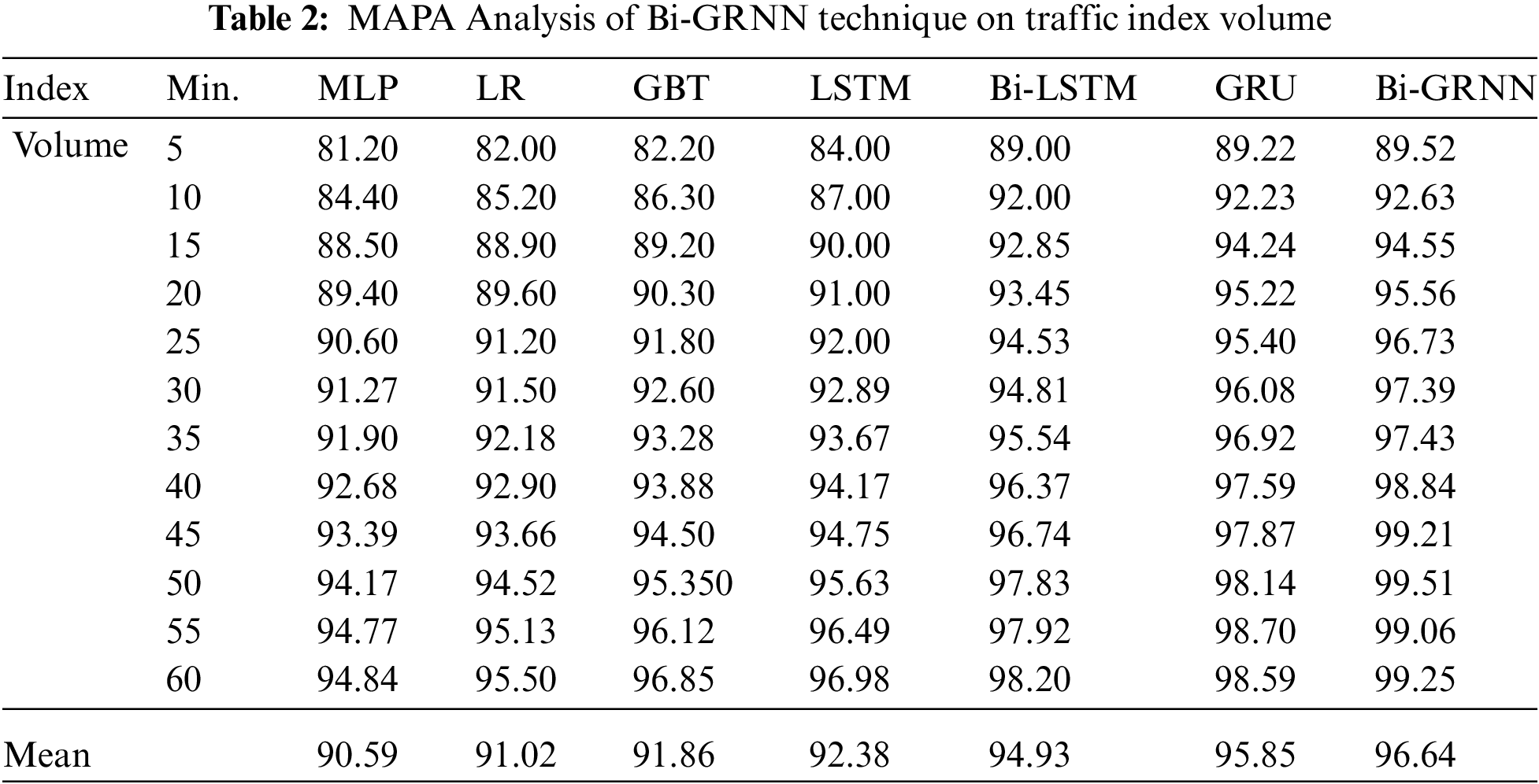
The predictive results of the Bi-GRNN model in terms of MAPA under varying volume are provided in Tab. 2. The table values denoted that the Bi-GRNN technique has accomplished effectual outcomes under different volumes. For instance, with 5 mts, the Bi-GRNN technique has offered a higher MAPA of 89.52% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU techniques have obtained a lower MAPA of 81.20%, 82%, 82.20%, 84%, 89%, and 89.22% respectively. Simultaneously, with 20 mts, the Bi-GRNN method has obtainable a maximum MAPA of 95.56% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU approaches have reached a lesser MAPA of 89.40%, 89.60%, 90.30%, 91%, 93.45%, and 95.22% correspondingly. Concurrently, with 40 mts, the Bi-GRNN technique has offered a maximum MAPA of 98.84% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU approaches have reached a minimal MAPA of 92.68%, 92.90%, 93.88%, 94.17%, 96.37%, and 97.59% correspondingly. Lastly, with 60 mts, the Bi-GRNN manner has existed an improved MAPA of 99.25% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU methodologies have gained a lower MAPA of 94.84%, 95.50%, 96.85%, 96.98%, 98.20%, and 98.59% correspondingly.
A complete average MAPA analysis of the Bi-GRNN technique with other TFP models takes place under varying volume in Fig. 6. The figure reported that the MLP technique has shown ineffectual TFP outcome with the least MAPA of 90.59% whereas the LR and GBT techniques have offered slightly increased MAPA of 91.02%, and 91.86% respectively. Followed by, the LSTM, BiLSTM, and GRU techniques have tried to accomplish somewhat reasonable average MAPA of 92.38%, 94.93%, and 95.85% respectively. However, the proposed Bi-GRNN technique has showcased supreme outcome with the maximum average MAPA of 96.64%.
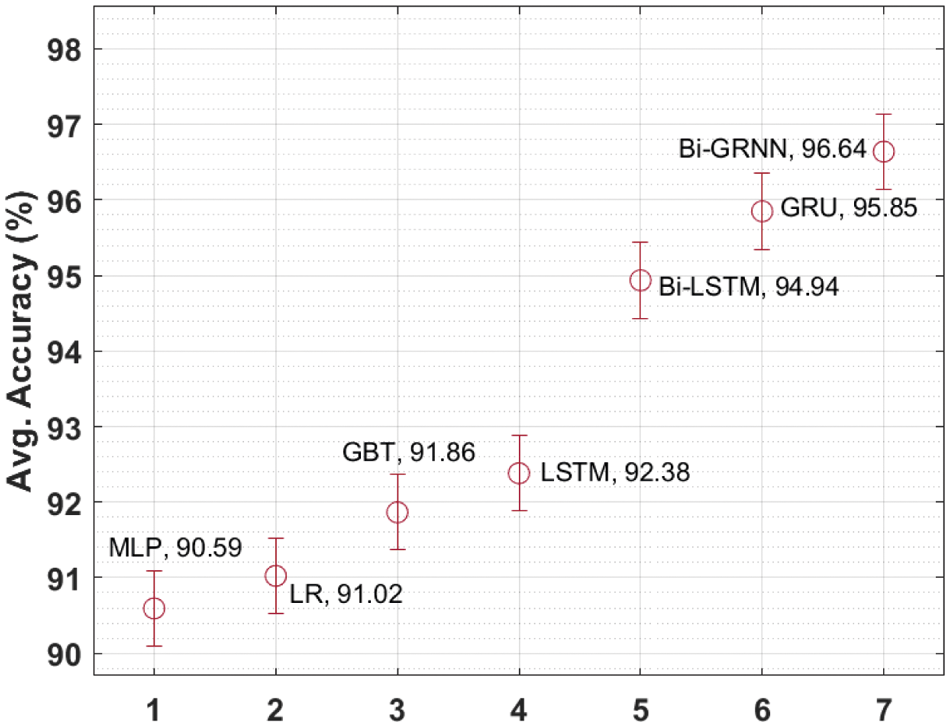
Figure 6: Average MAPA analysis of Bi-GRNN technique based on traffic index volume
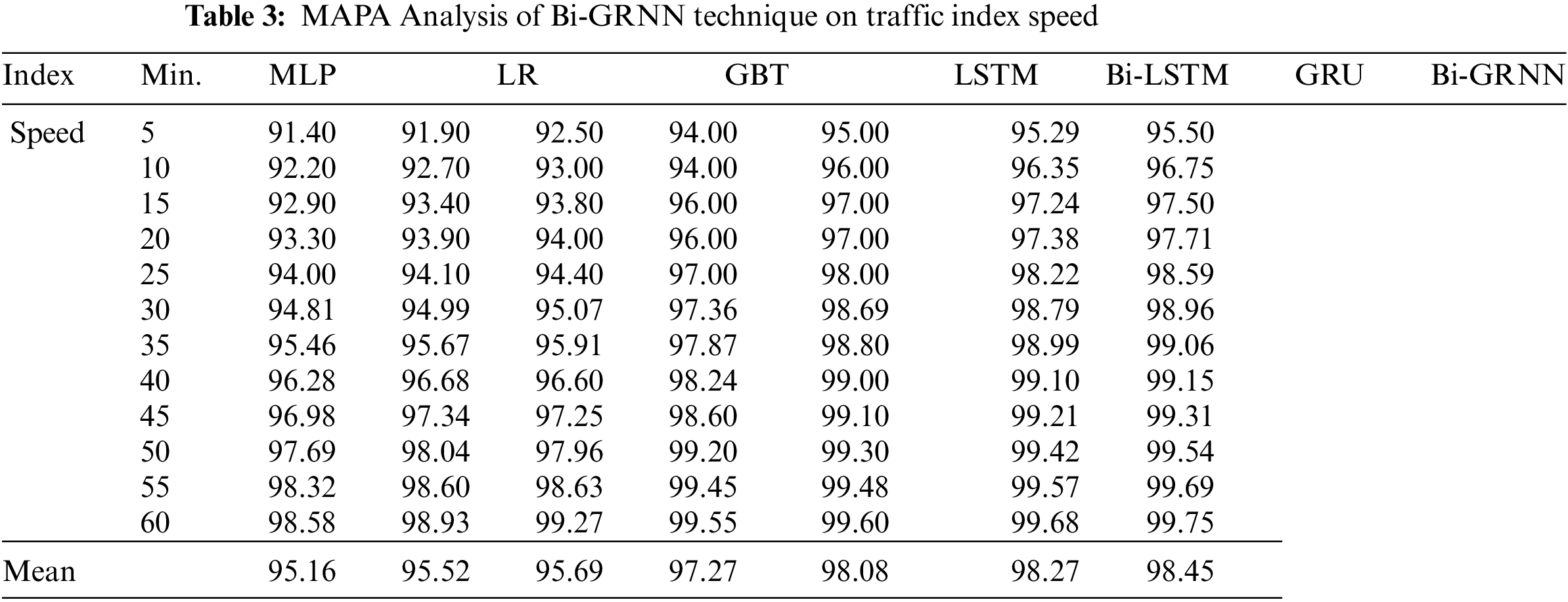
The predictive outcomes of the Bi-GRNN method with respect to MAPA under varying speed are given in Tab. 3. The table values denoted that the Bi-GRNN technique has accomplished effectual outcomes under different speeds. For sample, with 5 mts, the Bi-GRNN approach has obtainable a superior APA of 95.50% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU algorithms have gained the least MAPA of 91.40%, 91.90%, 92.50%, 94%, 95%, and 95.29% correspondingly. Concurrently, with 20 mts, the Bi-GRNN manner has existed a higher MAPA of 97.71% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU methods have reached a minimal MAPA of 93.30%, 93.90%, 94%, 96%, 97%, and 97.38% correspondingly. Simultaneously, with 40 mts, the Bi-GRNN algorithm has offered a higher MAPA of 99.15% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU techniques have attained the least MAPA of 96.28%, 96.68%, 96.60%, 98.24%, 99%, and 99.10% respectively. Finally, with 60 mts, the Bi-GRNN approach has offered an increased MAPA of 99.75% whereas the MLP, LR, GBT, LSTM, Bi-LSTM, and GRU methodologies have reached a lesser MAPA of 98.58%, 98.93%, 99.27%, 99.55%, 99.60%, and 99.68% correspondingly.
A comprehensive average MAPA analysis of the Bi-GRNN manner with other TFP techniques take place under different speed in Fig. 7. The figure stated that the MLP approach has revealed ineffectual TFP results with the minimum MAPA of 95.16% whereas the LR and GBT algorithms have obtainable somewhat improved MAPA of 95.52%, and 95.69% correspondingly. Likewise, the LSTM, BiLSTM, and GRU algorithms have tried to achieve somewhat reasonable average MAPA of 97.27%, 98.08%, and 98.27% correspondingly. But, the projected Bi-GRNN manner has outperformed supreme result with the maximal average MAPA of 98.45%.
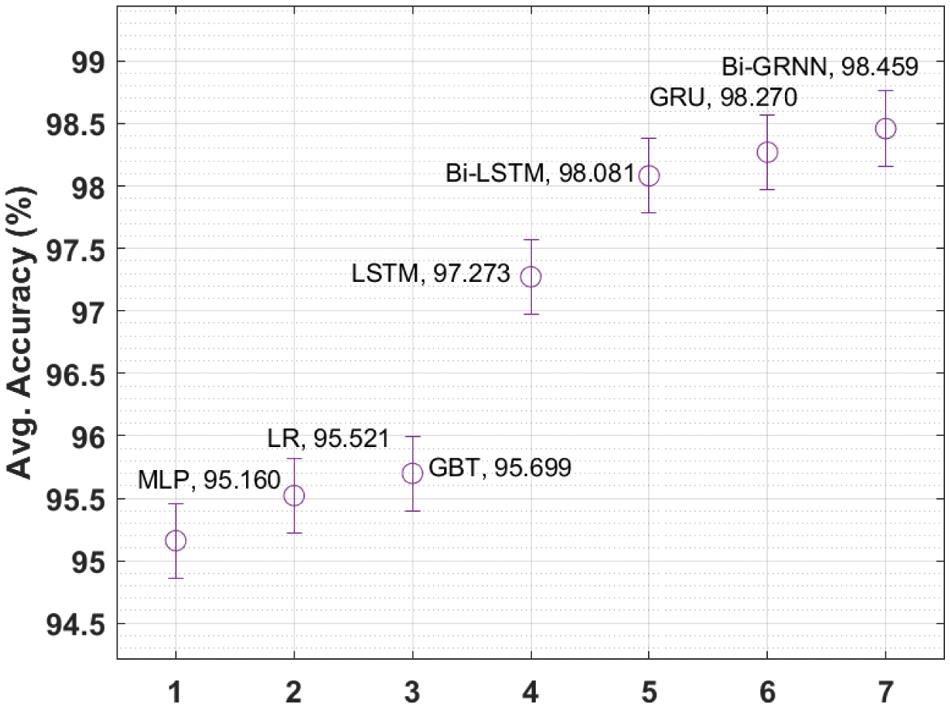
Figure 7: Average MAPA analysis of Bi-GRNN technique based on traffic index speed
From the above mentioned results, it is apparent that the proposed model is found to be effective energy management and TPF tool for AVs in ITS.
In this study, a new SEM-TPS technique is developed to accomplish effectual energy management and traffic prediction process in ITS. The SEM-TPS technique involves two major processes namely energy management and TFP. The SEM-TPS technique has presented a BMO-T2FLS technique to manage the available energy in the AVs. In addition, the choice of MFs of the T2FLS technique using the BMO algorithm helps to significantly achieve improved energy management performance. Besides, the Bi-GRNN technique is employed for the prediction of traffic flow in the AVs. A wide-ranging set of simulations are carried out to guarantee the enhanced performance of the SEM-TPS technique with respect to several evaluation metrics. The experimental outcomes highlighted the supreme performance of the SEM-TPS technique over the recent state of art approaches. In future, the presented model can be deployed in real time applications.
Acknowledgement: This work was supported by Taif University Researchers Supporting Program (project number: TURSP-2020/195), Taif University, Saudi Arabia.
Funding Statement: The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work under grant number (RGP 1/279/42).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. H. Khayyam, B. Javadi, M. Jalili and R. N. Jazar, “Artificial intelligence and internet of things for autonomous vehicles,” in Nonlinear Approaches in Engineering Applications, Springer: Cham, Switzerland, pp. 39–68, 2019. [Google Scholar]
2. R. N. Jazar and L. Dai, “Nonlinear Approaches in Engineering Applications: Automotive Applications of Engineering Problems,” in Automotive Applications of Engineering Problems, Springer: Cham, Switzerland, 2019. [Google Scholar]
3. M. Koot, J. T. B. A. Kessels, B. deJager, W. P. M. H. Heemels, P. P. J. vandenBosch et al., “Energy management strategies for vehicular electric power systems,” IEEE Transactions on Vehicular Technology, vol. 54, no. 3, pp. 771–782, 2005. [Google Scholar]
4. M. Koot, J. Kessels, B. D. Jager and P. V. D. Bosch, “Fuel reduction potential of energy management for vehicular electric power systems,” International Journal of Applied Pharmaceutics, vol. 1, no. 1, pp. 112, 2006. [Google Scholar]
5. J. S. Won and R. Langari, “Intelligent energy management agent for a parallel hybrid vehicle—Part ii: Torque distribution, charge sustenance strategies, and performance results,” IEEE Transactions on Vehicular Technology, vol. 54, no. 3, pp. 935–953, 2005. [Google Scholar]
6. H. Yu, R. Jiang, Z. He, Z. Zheng, L. Li et al., “Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives,” Transportation Research Part C: Emerging Technologies, vol. 127, pp. 103101, 2021. [Google Scholar]
7. H. Abdulsattar, A. Mostafizi, M. R. K. Siam and H. Wang, “Measuring the impacts of connected vehicles on travel time reliability in a work zone environment: An agent-based approach,” Journal of Intelligent Transportation Systems, vol. 24, no. 5, pp. 421–436, 2020. [Google Scholar]
8. A. Boukerche, Y. Tao and P. Sun, “Artificial intelligence-based vehicular traffic flow prediction methods for supporting intelligent transportation systems,” Computer Networks, vol. 182, pp. 107484, 2020. [Google Scholar]
9. A. A. Ganin, A. C. Mersky, A. S. Jin, M. Kitsak, J. M. Keisler et al., “Resilience in intelligent transportation systems (ITS),” Transportation Research Part C: Emerging Technologies, vol. 100, pp. 318–329, 2019. [Google Scholar]
10. E. I. Vlahogianni, M. G. Karlaftis and J. C. Golias, “Short-term traffic forecasting: Where we are and where we're going,” Transportation Research Part C: Emerging Technologies, vol. 43, pp. 3–19, 2014. [Google Scholar]
11. M. Ghasemi and X. Song, “Powertrain energy management for autonomous hybrid electric vehicles with flexible driveline power demand,” IEEE Transactions on Control Systems Technology, vol. 27, no. 5, pp. 2229–2236, 2019. [Google Scholar]
12. D. Phan, A. B. Hadiashar, R. Hoseinnezhad, R. N. Jazar, A. Jamali et al., “Neuro-fuzzy system for energy management of conventional autonomous vehicles,” Energies, vol. 13, no. 7, pp. 1745, 2020. [Google Scholar]
13. J. Wan, H. Yan, D. Li, K. Zhou and L. Zeng, “Cyber-physical systems for optimal energy management scheme of autonomous electric vehicle,” The Computer Journal, vol. 56, no. 8, pp. 947–956, 2013. [Google Scholar]
14. D. Phan, A. B. Hadiashar, M. Fayyazi, R. Hoseinnezhad, R. N. Jazar et al., “Interval type 2 fuzzy logic control for energy management of hybrid electric autonomous vehicles,” IEEE Transactions on Intelligent Vehicles, vol. 6, no. 2, pp. 210–220, 2021. [Google Scholar]
15. A. Emami, M. Sarvi and S. A. Bagloee, “Using kalman filter algorithm for short-term traffic flow prediction in a connected vehicle environment,” Journal of Modern Transportation, vol. 27, no. 3, pp. 222–232, 2019. [Google Scholar]
16. S. Lee, Y. Kim, H. Kahng, S. K. Lee, S. Chung et al., “Intelligent traffic control for autonomous vehicle systems based on machine learning,” Expert Systems with Applications, vol. 144, pp. 113074, 2020. [Google Scholar]
17. X. Song, Y. Guo, N. Li and L. Zhang, “Online traffic flow prediction for edge computing-enhanced autonomous and connected vehicles,” IEEE Transactions on Vehicular Technology, vol. 70, no. 3, pp. 2101–2111, 2021. [Google Scholar]
18. S. Manne, E. L. Lydia, I. V. Pustokhina, D. A. Pustokhin, V. S. Parvathy et al., “An intelligent energy management and traffic predictive model for autonomous vehicle systems,” Soft Computing, vol. 25, no. 18, pp. 11941–11953, 2021. [Google Scholar]
19. D. Phan, A. B. Hadiashar, C. Y. Lai, B. Crawford, R. Hoseinnezhad et al., “Intelligent energy management system for conventional autonomous vehicles,” Energy, vol. 191, pp. 116476, 2020. [Google Scholar]
20. N. Yang, M. R. Amini, M. J. Roberson and J. Sun, “Real-time model predictive control for energy management in autonomous underwater vehicle,” in 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, pp. 4321–4326, 2018. [Google Scholar]
21. J. C. C. Martinez, A. J. Y. Delgado and A. T. Cabrera, “Cluster head enhanced election type-2 fuzzy algorithm for wireless sensor networks,” IEEE Communications Letters, vol. 21, no. 9, pp. 2069–2072, 2017. [Google Scholar]
22. M. H. Sulaiman, Z. Mustaffa, M. M. Saari and H. Daniyal, “Barnacles mating optimizer: A new bio-inspired algorithm for solving engineering optimization problems,” Engineering Applications of Artificial Intelligence, vol. 87, pp. 1–13, 2020. [Google Scholar]
23. S. Ahmed, K. K. Ghosh, S. K. Bera, F. Schwenker and R. Sarkar, “Gray level image contrast enhancement using barnacles mating optimizer,” IEEE Access, vol. 8, pp. 169196–169214, 2020. [Google Scholar]
24. P. Li, A. Luo, J. Liu, Y. Wang, J. Zhu et al., “Bidirectional gated recurrent unit neural network for Chinese address element segmentation,” ISPRS International Journal of Geo-Information, vol. 9, no. 11, pp. 635, 2020. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |