DOI:10.32604/cmc.2022.023588
| Computers, Materials & Continua DOI:10.32604/cmc.2022.023588 | |
| Article |
Adaptive Fuzzy Logic Controller for Harmonics Mitigation Using Particle Swarm Optimization
1Department of Electrical & Computer Engineering, COMSATS University Islamabad Lahore Campus, Lahore, 54000, Pakistan
2Syed Babar Ali School of Science and Engineering, Lahore University of Management Sciences, Lahore, 54000, Pakistan
3Department of Computer Science, College of Computer and Information Sciences, King Saud University, Riyadh, 11633, Saudi Arabia
4Department of Electrical Engineering, Superior University, Lahore, 54000, Pakistan
5Department of Electrical Engineering, Government College University, Lahore, 54000, Pakistan
6Department of Information and Communication Engineering, Yeungnam University, Gyeongsan, 38541, Korea
*Corresponding Author: Muhammad Shafiq. Email: shafiq@ynu.ac.kr
Received: 13 September 2021; Accepted: 02 November 2021
Abstract: An excessive use of non-linear devices in industry results in current harmonics that degrades the power quality with an unfavorable effect on power system performance. In this research, a novel control technique-based Hybrid-Active Power-Filter (HAPF) is implemented for reactive power compensation and harmonic current component for balanced load by improving the Power-Factor (PF) and Total–Hormonic Distortion (THD) and the performance of a system. This work proposed a soft-computing technique based on Particle Swarm-Optimization (PSO) and Adaptive Fuzzy technique to avoid the phase delays caused by conventional control methods. Moreover, the control algorithms are implemented for an instantaneous reactive and active current (Id-Iq) and power theory (Pq0) in SIMULINK. To prevent the degradation effect of disturbances on the system's performance, PS0-PI is applied in the inner loop which generate a required dc link-voltage. Additionally, a comparative analysis of both techniques has been presented to evaluate and validate the performance under balanced load conditions. The presented result concludes that the Adaptive Fuzzy PI controller performs better due to the non-linearity and robustness of the system. Therefore, the gains taken from a tuning of the PSO based PI controller optimized with Fuzzy Logic Controller (FLC) are optimal that will detect reactive power and harmonics much faster and accurately. The proposed hybrid technique minimizes distortion by selecting appropriate switching pulses for VSI (Voltage Source Inverter), and thus the simulation has been taken in SIMULINK/MATLAB. The proposed technique gives better tracking performance and robustness for reactive power compensation and harmonics mitigation. As a result of the comparison, it can be concluded that the PSO-based Adaptive Fuzzy PI system produces accurate results with the lower THD and a power factor closer to unity than other techniques.
Keywords: Harmonics compensation; soft computing technique; hybrid fuzzy PSO based PI controller; HSAPF; power quality
The electronic devices draw nonsinusoidal current that causes harmonics in the system. The harmonics may cause severe problems in the power system like power loss and economic loss. While a non-linear load is attached to the PCC (Point of Common-Coupling), harmonics are produced that can harm electronic devices commonly used on commercial and industrial scales [1]. The poor Power Factor (PF) and increase in line losses are the main problems created due to non-linear loads. Nowadays, researchers are actively working on harmonics mitigation and power quality enhancement. Some non-linear loads like VFDs (Variable Frequency Drives), transducers, etc., produce harmonics in the power system. Sometimes these harmonics may trip the over-current protection relay, as discussed in [2]. Many techniques are proposed by existing literature and further applied in industries to eliminate harmonics from the power system; however, filter design as per standards is the best of all existing approaches. The Active Filter, Passive Filter, Hybrid Filter are the three categories of filters mostly used which mitigate harmonics from the power system. The passive filters are low-cost, and the basic function of these filters is to provide a path of low impedance [3]. However, the power quality provided by these filters is less than it is necessary to install an Active Power Filter (APF) in the power system [4]. Series filters are more expensive than shunt filters for small rating industrial loads that reduce active series filters [5].
While current and voltage are decreasing in the power system, installing a hybrid type filter combines both active and passive filters implemented in [6]. Moreover, with excessive use of the loads that are non-linear, the power system is badly affected by harmonics [7]. To solve unconstrained optimization algorithms, a q-gradient descent optimization algorithm has been proposed. The algorithm occasionally declares a fixed value that is not the solution but is very near to it due to the use of the q-derivative in [8]. The multi-objective technique-based PSO has been implemented in [9] for HAPF, and the components have been studied. The qualitative aspects of possible solutions to the non-linear implicit fractionals boundary condition in variable order settings [10]. The existence conditions given below in (1) for the solutions in our establishments have been obtained using Krasnoselskii's theorem, and Ulam–Hyerz–Rassias stability (UHR) can be verified. The fractional calculus domain deals with the extension of conventional control to a fractional control that derives integration order and taking derivative from integer expression to real numbers. The fractional-order differential-integral is given as;
The most common definition in engineering applications is Caputo definition [11] and can be observed in (2)
where
The key motivation behind the proposed implementation is that the PI controller is incapable of reacting to an abrupt change in error signal because it can only determine instantaneous values without considering the rise and fall of error. Hence, the proposed implementation is more realistic and capable of practical application. The main contributions of this research work are as follow:
• Simulation of HSAPF for three-phase power system using Pq0 and Id-Iq control theory in SIMULINK.
• To optimize the PI controller parameters using PSO that minimizes a objective function by providing robust parameters to PI and can also regulate DC link voltage that helps maintain the charging and discharging of capacitors.
• Implementation of PSO-based Adaptive Fuzzy PI system to eliminate harmonics in a power system, based on gains acquired by PSO, and its performance compared with other techniques.
This part of the paper is summarized in sections, with Section-2 summarizing a literature review. Section 3 examines the control techniques used for harmonics mitigation. In Section 4, results will be discussed, and a comparison of a given technique with previous systems such as Pq0, Id-Iq PSO-PI, based on THD, DC-Link Voltage regulation will be summarized. In the Section 5, the conclusion based future-works will be discussed.
By referring [12], the Enhanced Grasshopper Optimization-based Artificial Neural Network (EGOANN) technique has been implemented to make the source current sinusoidal under the unbalanced condition, and the simulation was carried out on MATLAB. The result presents that the THD value has been reduced per the IEEE standard provided. The Fuzzy Logic-based APF has been designed for harmonics compensation in power systems and results present that the DC-link voltage is optimized by using FLC rather than PI [13–15]. In [16,17], a new FLC-based control scheme has been proposed for the Unifid-Power Quality Conditioners (UPQC) to reduce voltage dip, THD in a power distribution system to improve the PF. Under unbalanced load conditions, the FLC outperformed the conventional PI controllers in [16] and [17]. The THD obtained from FLC has been less than 5%, and additionally, the system's robustness has also been improved by authors in [18]. Moreover, a HAPF is designed and augmented by employing Particle-Swarm with intelligent Grey-Wolf's Optimization (PSO-GWO) with Fractional orders PID controller (FOPID) in [19–22]. The controller (FOPID) parameters are optimized by the intelligent PSO-GWO technique that has been implemented to enhance the power system quality [21,22]. The FLC implementation for HAPF has been used in [23] to produce appropriate switching signals as it helps to control both output currents of the converter. In [24], a PSO-based FOPI controller has been implemented for the HSAPF, and the experiments are being tested under unbalanced load situations, with THD reduced to less than 5%. Moreover, in [25], an FLC-based active filter has been implemented to mitigate harmonics on the system by using MATLAB fuzzy toolbox. The current exists in the neutral wire flow due to an unbalanced load connected to the system [26]. The Fuzzy based control algorithms are implemented to design APF and compensate reactive power with source current in micro-grid [27]. A controller must be capable of handling the non-linearity and robustness of the system under an unbalanced load [28–30].
HSAPF combines single tuned pasive filters in the series arrangement with the active filter used for harmonic current compensation, as shown in Fig. 1. A robust, adaptive, and techno-economical controller is required for HSAPF to reduce the switching loses of the invertors and the voltage rating of APF.

Figure 1: Hybrid active power filter connected with non-linear load for current compensation
3.2 Implementation of
The Id-Iq-based control technique for reference current calculation contains three functional blocks and is carried out in MATLAB using the three-phase power system. The dc-link capacitor voltage has been compared to a dc reference value value, and than error is given to the PI for zero steady-state error that is further used to track a reference value of current signal. The Id-Iq currents are obtained from Park's transformation that passed through the eighth order butter-worth filter to eliminate dc components from the non-linear load.
3.2.1 Implementation of PSO-PI for
The conventional PI controller has been implemented with
whereas i and k represent the total iterations with particle number,
ISE integrates square of error signal over time, as given in (5), it will eliminate large errors from the system; however, it allows small errors in the system. In (6), the Integrates Absolute Error over time IAE has been modeled and slowed down the response. ITAE expression given in (7) means integrates absolute error signal multiply with time over time help settle system quickly compared to other performance indices [20]. The goal is to minimize ITAE for Kp, Ki values as (8). P1 and P2 are upper, the lower range of the proportional constant, and I1 and I2 are upper, lower limits of the Ki as depicted in (9).
J is performance index, tsim is represented as simulation time that would be a large value so that system output response reaches steady-state value and T = 10sec is selected. W is the weight factor. Vector K = [K1, K2,…….Kn] is control system parameters i.e., PI parameters.[ Kp, Ki]T represents the parameters that have to be optimized and e =
3.2.2 Stepwise Algorithm of PSO

3.2.3 Inertia Weight Control Strategy for PSO
Its inertial weight determines the PSO convergence behavior. A large inertial weight causes the optimization to converge slowly, while the low inertial weight causes local trapping.

Figure 2: Linear decreasing inertial weight graph of PSO-PI control technique
As a result, the inertia weight should be selected to achieve a better search-utilization trade-off. In the implemented model, an inertial weight expression decreases linearly from a large to a small value over some iterations, improving the technique's performance.
As inertial weight is represented by ‘w’ that sets

Figure 3: SIMULINK implementation of PSO-PI based control technique

In this section, by using gains obtained from PSO, adaptively tuning of PI controller has been carried out using FLC. The following quantization factor can transform the error ‘e’ and rate of change ‘ec’ from the fundamental to the fuzzy universe ke = 3/

Figure 4: Pltting of membership functions of e, ec and Δ
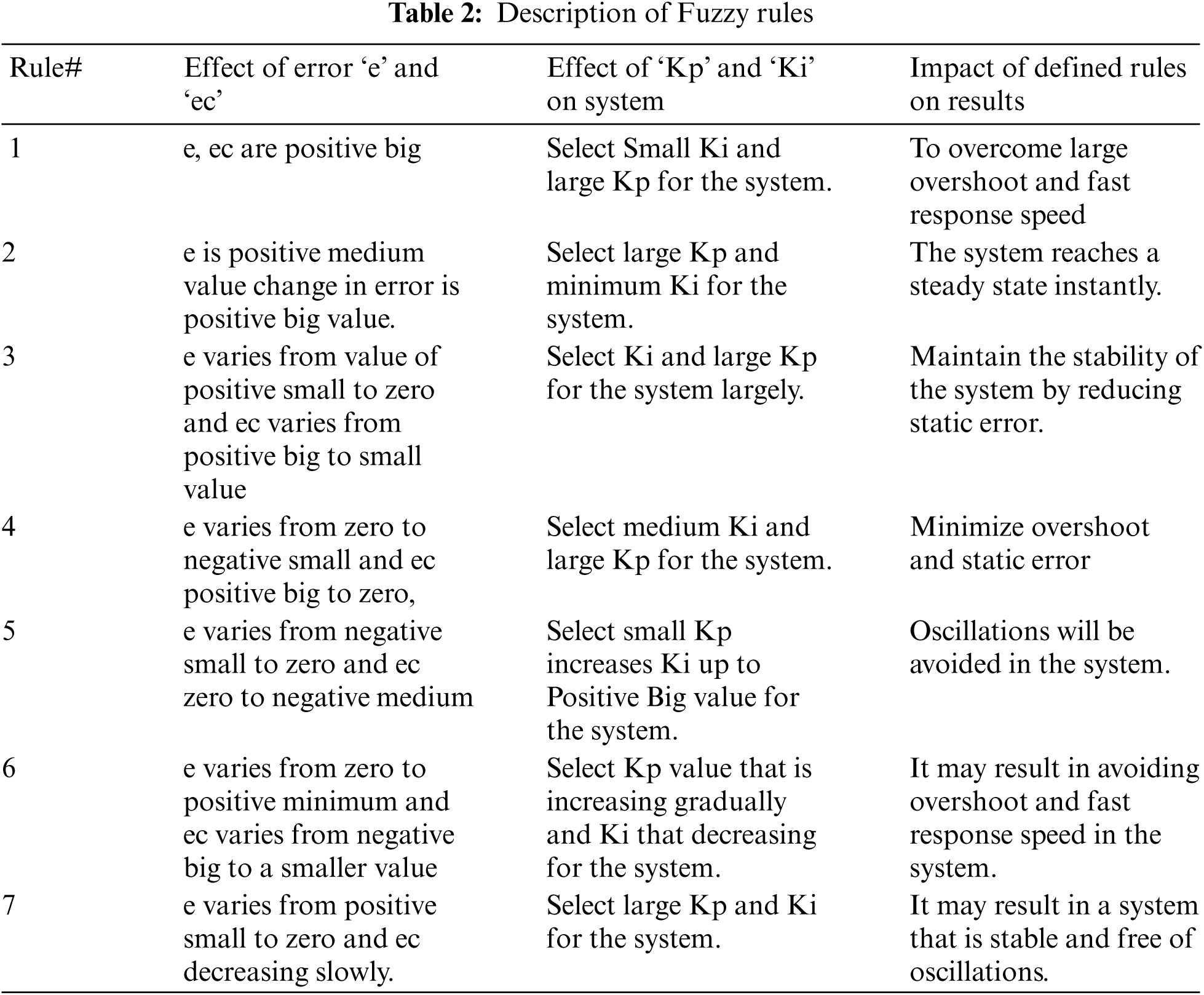
Seven sets of fuzzy are used to change these crisp inputs into linguistics variables, i.e., NB (Negative Big), NM (Negative- Middle), NS (Negative-Small), Zero's (ZE), Positive-Small value (PS), Positive-Middle value (PM), PB (Positive Big). Fuzzy rules for inputs and output is given in [28] and their detailed description in Tab. 2. The working of FLC depends on the rules set. The Fuzzy rules can be expressed by IF-Then conditions [28].
1) R1: if e is NB and ec is NB then Δkp1 is PB and Δki1 is NB
…
49) R49: if e is PB and ec is PB then Δkp1 is PB and Δki1 is NB
3.3.1 Design of PSO Based Adaptive Fuzzy-PI System
The PI parameters sum output by FLC and the PSO-PI parameters is the adaptive adjustment of the PI controller for the dc voltage regulator. Fig. 6 elaborates the proposed Hybrid technique. By using optimize gains obtained from PSO-PI, adaptive adjustment of PI controller will be carried out using FLC so that reference current is optimized as elaborated in (12)–(13).
As Figs. 5 and 6 depicts the proposed Adaptive Fuzzy PI-based

Figure 5: SIMULINK implementation of an Adaptive Fuzzy PI control technique

Figure 6: SIMULINK implementation of Hybrid Fuzzy PSO-PI control technique
This part has demonstrated the effectiveness of the given HSAPF due to non-linear loads. by using the simulation results generated in MATLAB. The load is three phase bridge rectifier attached to its DC side with a resistive load.
The characteristics of the load current are used to design the RL tuned passive filter. A single-tuned passive filter is used to remove low-order harmonics as they have a maximum impact. The design simulation parameters are in Tab. 3 with dominant odd harmonics, the source current has a THD of 35.85%, and FFT analysis with load (non-linear) is shown in Figs. 7a and 7b, which represents the response of source current (A) with time (sec).

It can be seen that the resultant waveform is non-sinusoidal that causes the source current to be distorted. So, there is a need to make them sinusoidal that improve power quality by implementing different techniques. The Source voltage remains sinusoidal due to the balanced load. As in Fig. 7b, the average THD of source current for all fundamental frequencies is 35.85 percent without any control technique. Lower-order harmonics are of more concern than higher-order harmonics.

Figure 7: Response of System without any control technique: (a) Source current waveform without any control technique; (b) harmonic spectrum and THD of source current without any control technique
Three scenarios are investigated for this non-linear load Case 1: when Id-Iq is implemented alone with HSAPF for calculating the reference currents. Case 2: when HAPF is attached with Id-Iq based PSO-PI controller. Case 3: HAPF is attached with Id-Iq based adaptive Fuzzy PI controller for estimating maximum reference current.
4.1 Id-Iq Based HSAPF with PI Controller for THD Reduction
After implementing the HSAPF based on the Id-Iq technique on MATLAB/Simulink, the waveform of the Source current (Is) becomes sinusoidal under non-linear load with THD 2.03% at a fundamental frequency of 50 Hz as given in Fig. 8f. The main goal of the control technique is to minimize transient response due to non-linear load and obtain sinusoidal source current. The harmonics in source voltage are minimized by impedance at the source side. Thus, the sinusoidal waveform can be observed in Fig. 8a. Fig. 8b illustrates the sinusoidal waveform of source voltage after implementing the Id-Iq control technique based on HSAPF. The harmonics in source voltage are minimized by impedance at the source side, so it can be concluded that no distortion on source voltage is observed. Fig. 8c depicts the current in load of the three phase power system with bridge rectifier attached across the three-phases. The transient response of the filter current is initially unbalanced, but after 0.04sec, the system achieves its stability.
The conventional controller is mainly for DC link voltage regulation to minimize switching loss of VSI and to charge the DC capacitor upon discharging. From Fig. 8e, it can be concluded from the results that response time of the voltage regulator is minimized up-to 0.06 sec by the Id-Iq technique, which is far better than Pq0 technique. Figs. 8a–8d shows that the distorted source is current, and the filter current is not restored instantly as it takes time to get stable. Moreover, there is also an overshoot that needs to improve further. As from Fig. 8e, the dc-link waveform at time 0.06 sec is not in a steady state, and initially, there is an overshoot that needs to be improved.

Figure 8: Id-Iq control technique for HAPF in Simulink: (a) waveform of source-current; (b) waveform of supply voltage; (c) waveform of load current; (d) waveform of filter current; (e) regulated DC-link voltage; (f) FFT spectrum of source current
4.2 Id-Iq Based HSAPF with PSO-PI Controller for THD Reduction
The HSAPF based on the PSO-PI control technique is used for dc voltage regulator to improve transient response due to non-linear load. The PI controller's performance depends on its gains; the best gains produce better results and improve system response. Fig. 9a shows the sinusoidal waveform of the source current obtained after successfully implementing the PSO-PI-based Id-Iq technique. The results show that the PSO algorithm is an efficient technique that helped provide better performance than the conventional PI controller by improving steady-state response by providing the best gains to the PI controller. Fig. 9b shows the load current in a three phase power system. The non-sinusoidal waveform shows that may affect the source current due to the switching operation of elements and the commutation of the high current power circuits. After harmonics compensation, both source voltage and current are in phase, and reactive power is compensated successfully to make the PF close to unity. From Fig. 9d, it can be observed that applying the PSO technique on the PI controller minimizes the THD of the source current varied from 2.03% to 1.96% at the fundamental frequency, i.e., 50 Hz. Fig. 9c shows that the PSO-PI-based Id-Iq control technique performed better by injecting compensating current thus, source voltages and currents are in phase has helped improve THD of the system to 1.98% as given in Fig. 9d. When the DC voltage is not reached at stability and the dc voltage's is reached at stability, the harmonic current is eliminated, and a balanced sinusoidal source current is obtained. The results in Fig. 9e depict that overshoot is reduced from 1700 V to 1300 V and settling time reduced from 0.06 to 0.05sec.
The results concluded that PSO has successfully tuned the PI controller by giving the best gains, so that performance of Id-Iq-based HSAPF is further improved. As in Fig. 9e, there is still an overshoot and oscillation in dc voltage because the PI technique failed to handle robustness and non-linearity of the system; hence, there is a need to design and implement a suitable controller that will help to minimize robustness that overshoot and transient response get also be improved. It can be observed in Figs. 9a–9c the waveform of the source current and filter current still has oscillations and overshoot that need to improve. So, PSO has been implemented to obtain the optimized gain for the adaptive tuning of PI controller has been carried out by using FLC that can help improve the performance of HSAPF.

Figure 9: SIMULINK based PSO-PI technique: (a) source current waveform; (b) waveform of load current; (c) filter's current; (d) FFT spectrum of the source current's; (e) DC voltage regulator using PSO-PI technique on Simulink
4.3 Id-Iq Based HSAPF with PSO Based Adaptive Fuzzy-PI Controller for THD Reduction
This research aims to mitigate current harmonics on the source side up to the minimum value caused by non-linear load so that power quality in the system can also be improved. Fig. 10a depicts that the sinusoidal waveform of source current has been obtained after adaptive adjustment of PI controller through hybrid techniques. The distorted waveforms, transient response, and overshoot have been improved to a minimum value by using the PSO-based Adaptive Fuzzy-PI system control technique compared to PSO-PI and conventional PI controller-based HSAPF. Fig. 10b shows that the waveform of filter current becomes sinusoidal with less stability time and overshoot than PSO-PI and conventional PI controller. The THD has also reduced to 1.72% that can be observed in Fig. 10d. Vdc tracked its reference value within less time to maintain the balance of difference of powers from load to source side. From the Fig. 10c, it can seen that the overshoot has been reduced from 1300 to 850 V and settling time from 0.05 to 0.04 sec. The simulation results demonstrate that this novel technique performed well for tuning the PI controller and thus, improved the system response.

Figure 10: PSO based adaptive Fuzzy-PI system (a) waveform of source current (b) waveform of filter current waveform (c) regulated DC voltage (d) FFT spectrum of source current
5 Comparative Analyses and Discussion
In Tab. 4, a comparison of proposed technique with conventional techniques in terms of stability, THD, PF, and sample time (Ts) is presented. It has been concluded that the given technique based HSAPF can keep the actual voltages and current by reducing the stability time (Tst) of the voltage regulator to 0.04 sec by using the PSO-based adaptive Fuzzy PI controller for harmonics mitigation.
The proposed model aids in the visualization of data in situations where wireless applications cannot operate independently of traditional database transactions. Data is accessed from both traditional centralized and distributed sources, as well as wireless applications, at the same time. It includes mobile transactions/queries as well as dissemination applications. As stated in our previous work [31], our model easily visualizing all kinds of the access. To aid comprehension and the appreciation of our proposed model, we classify the various types into the units listed below.
• Contents Providers (CP)s offer the data to be read out and revised by each user.
• Dissemination Operators (DO)s are in control to push the data. Moreover, CPs feed DOs along with the required disseminated data.
• Mobile Support Stations (MSS)s are the conventional platforms to help bi-directional wireless communication among wireless users.
• Dissemination Controller (DC) directs data to be disseminated from the MSSs, CPs to DOs.
Functional units of dissemination design are separated into the 4 stages of the cellular network as follows.
• The Database level: In this level, the CPs supplies the data to be disseminated, which they maintain and manage. These may be legacy systems that support conventional relational databases and SQL access.
• The Signaling level: In this level, one or more DC is required to specify what and when data items are put in the wireless dissemination channels.
• The Network level: At this level, MSSs provide the services and infrastructure needed to support the normal two-way wireless phone/data usage and the User level where Wireless Clients (WC)'s exists.

In this paper, a techno-economical HSAPF has been implemented to overcome the power quality issue by using an appropriate soft computing technique. Initially, Pq0 and
• The error measured DC voltage of VSI and the set value is minimized in the case of a PSO-based adaptive Fuzzy PI.
• The proposed technique gives better tracking performance and robustness for reactive power compensation and harmonics mitigation.
• It's economical, easy to carry out the technique.
Three different control techniques are analyzed in this paper for a three-phase HSAPF. The proposed design reduces THD to the lowest possible levels in all test cases. It can observed that the THD of source current in the case of PSO-based adaptive Fuzzy PI has reduced to 1.72%, while in the case of PSO-PI, it is reduced to 1.98% that lies the IEEE, 519–1992 harmonic standard. Therefore, it could be inferred from the comparative analysis that the adaptive Fuzzy PI system tuned by PSO has accurate results with a less THD, with minimum Tst, and a power factor nearer to unity. This work can be further extended in the future as instead of using PI controller, FOPI based PSO-GA technique can be implemented for further improvement in the performance of HSAPF. Moreover, a practical implementation based on a real hardware platform of this proposed technique can be considered in future work to test the results in MATLAB of the proposed technique.
Acknowledgement: The authors are thankful to King Saud University, Riyadh, Saudi Arabia, for supporting this research work, through Researchers Supporting Project number RSP-2021/184.
Funding Statement: This work was supported by the King Saud University, Riyadh, Saudi Arabia, through Researchers Supporting Project number RSP-2021/184.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. X. Wang and F. Blaabjerg, “Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis,” IEEE Transactions on Smart Grid, vol. 10, no. 3, pp. 2858–2870, 2019. [Google Scholar]
2. R. Balasubramanian, K. Parkavikathirvelu, R. Sankaran and R. Amirtharajan, “Design, simulation and hardware implementation of shunt hybrid compensator using synchronous rotating reference frame (SRRF)-based control technique,” Electronics, vol. 8, no. 1, pp. 44, 2019. [Google Scholar]
3. V. Corasaniti, M. Barbieri, P. Arnera and M. Valla, “Hybrid active filter for reactive and harmonics compensation in a distribution network,” IEEE Transactions on Industrial Electronics, vol. 56, no. 3, pp. 670–677, 2008. [Google Scholar]
4. L. Hai, L. Jincheng and W. Weiping, “Research of harmonic detection and fuzzy-PID control in series active power filter,” in Int. Conf. of Mechatronics and Automation, Harbin, China, pp. 2957–2962, 2007. [Google Scholar]
5. S. Labdai, B. Hemici, N. Bounara and A. Boulkroune, “Control of a DFIG based WECS with optimized PI controllers via a duplicate PSO algorithm,” in Int. Conf. on Control, Automation and Diagnosis, Grenoble, France, pp. 1–6, 2019. [Google Scholar]
6. E. Fabricio, S. Junior, B. Jacobina and M. Rossiter, “Analysis of main topologies of shunt active power filters applied to four-wire systems,” IEEE Transactions on Power Electronics, vol. 33, pp. 2100–2112, 2018. [Google Scholar]
7. M. Roslan, A. Shetwi, M. Hannan, P. Ker and M. Zuhdi, “Particle swarm optimization algorithm-based PI inverter controller for a grid-connected PV system,” Public Library of Science One, vol. 15, no. 12, pp. 1–31, 2020. [Google Scholar]
8. S. Mishra, K. Rajkovic, P. Samei, M. Chakraborty and K. Ram, “A q-gradient descent algorithm with quasi-fejér convergence for unconstrained optimization problems,” Fractal and Fractional, vol. 5, no. 3, pp. 110, 2021. [Google Scholar]
9. Y. Jingrong, P. Pan, M. Dong and Y. Sun, “The optimization design of main circuit of hybrid active power filter,” in Int. Conf. of Machanical and Electrical Engineering, Berlin, Heidelberg, pp. 13–19, 2013. [Google Scholar]
10. M. Kaabar, A. Refice, M. Souid, F. Martínez, S. Etemad et al.,“Existence and UHR stability of solutions to the implicit nonlinear FBVP in the variable order settings,” Mathematics, vol. 9, no. 14, pp. 1693, 2021. [Google Scholar]
11. A. Khan, M. Jaffery, Y. Javed, J. Arshad, A. Rehman et al.,“Hardware-in-the-loop implementation and performance evaluation of three-phase hybrid shunt active power filter for power quality improvement,” Mathematical Problems in Engineering, vol. 2021, pp. 1–23, 2021. [Google Scholar]
12. G. Arunsankar and S. Srinath, “Optimal controller for mitigation of harmonics in hybrid active power filter connected distribution system: An EGOANN technique,” Journal of Renewable Sustain Energy, vol. 11, no. 2, pp. 1–16, 2019. [Google Scholar]
13. G. Malathi and T. Venkatesan, “Harmonic mitigation analysis of PI and fuzzy logic based shunt active power filters for different non-linear loads,” International Journal of Electrical, Electronics and Data Communication, vol. 4, no. 8, pp. 51–55, 2016. [Google Scholar]
14. A. Faiza, S. Morsli and A. Tayeb, “Self tuning filter based fuzzy logic controller for active power filter,” Journal of Europ des System Automation, vol. 53, no. 5, pp. 739–745, 2020. [Google Scholar]
15. Z. A. Memon, Memon M. A. Uqaili and M. A. Unar, “Estimation of compensation current reference using fuzzy logic controller for three-phase hybrid active power filter,” International Journal of Computing Application, vol. 43, no. 11, pp. 16–21, 2012. [Google Scholar]
16. L. Zellouma, B. Rabhi, S. Saad, A. Benaissa and M. Benkhoris, “Fuzzy logic controller of five levels active power filter,” Energy Procedia, vol. 74, pp. 1015–1025, 2015. [Google Scholar]
17. R. Asif, A. Rehman, S. Rehman, J. Arshad, J. Hamid et al.,“Design and analysis of robust fuzzy logic maximum power point tracking based isolated photovoltaic energy system,” Engineering Reports, vol. 2, no. 9, pp. 12234, 2020. [Google Scholar]
18. M. Iqbal, M. Jawad, M. Jaffery, S. Akhtar, M. Nadeem et al.,“Neural networks based shunt hybrid active power filter for harmonic elimination,” IEEE Access, vol. 9, pp. 69913–69925, 2021. [Google Scholar]
19. A. Mishra, S. Das, P. Ray, R. Mallick and A. Mohanty, “PSO-GWO optimized fractional order PID based hybrid shunt active power filter for power quality improvements,” IEEE Access, vol. 8, pp. 74497–74512, 2020. [Google Scholar]
20. E. Thajeel, M. Sulaiman and H. Daniyal, “Active power filter based optimum design of PI controller using particle swarm optimization,” International Journal of Energy and Power Engineering Research, vol. 3, pp. 10–15, 2015. [Google Scholar]
21. S. Debnath, P. Chandra and K. Murase, “Particle swarm optimization based adaptive strategy for tuning of fuzzy logic controller,” International Journal Artificial Intelligence Application, vol. 4, no. 1, pp. 37–50, 2013. [Google Scholar]
22. S. Patnaik and K. Panda, “Real-time performance analysis and comparison of various control schemes for particle swarm optimization-based shunt active power filters,” International Journal Electrical Power Energy System, vol. 52, no. 1, pp. 185–197, 2013. [Google Scholar]
23. N. Alloui and C. Fetha, “Optimal design for hybrid active power filter using particle swarm optimization,” Transactions on Electrical and Electronic Material, vol. 18, no. 3, pp. 129–135, 2017. [Google Scholar]
24. E. Thajeel, H. Daniyal and M. Sulaiman, “Performance analysis of active power filter for harmonic compensation using PI-PSO,” ARPN Journal of Engineering and Applied Sciences, vol. 10, no. 21, pp. 9885–9891, 2015. [Google Scholar]
25. J. Arshad, A. Rehman, A. Rehman, R. Ullah and S. Hwang, “Spectral efficiency augmentation in uplink massive MIMO systems by increasing transmit power and uniform linear array gain,” Sensors, vol. 20, no. 17, pp. 4982, 2020. [Google Scholar]
26. H. Espitia, J. Soriano, I. Machon and H. Lopez, “Design methodology for the implementation of fuzzy inference systems based on boolean relations,” Electronics, vol. 8, no. 11, pp. 1–28, 2019. [Google Scholar]
27. S. Pandey, S. Shimi and S. Chatterji, “A fuzzy-PSO based PI controller for DC link voltage improvement in DSTATCOM,” International Journal of Current Engineering and Technology, vol. 4, no. 4, pp. 2843–2847, 2014. [Google Scholar]
28. W. Zhang, Y. Fang, R. Ye and Z. Wang, “Analysis and design of a double fuzzy PI controller of a voltage outer loop in a reversible three-phase PWM converter,” Energies, vol. 13, no. 15, pp. 1–19, 2020. [Google Scholar]
29. A. El-Deen, A. Elbaset, D. Alanazi, K. Alaboudy and A. Ziedan, “Particle swarm optimization technique for shunt active power filter,” in Int. Conf. on System Reliability and Safety, Rome, Italy, pp. 308–315, 2019. [Google Scholar]
30. D. Papan and S. Mekhilif, “Shunt hybrid active power filter under non-linear voltage based on fuzzy logic controller,” International Journal of Electronics, vol. 103, no. 6, pp. 1580–1592, 2016. [Google Scholar]
31. A. Almogren, “The integration of telecommunication and dissemination networks,” International Journal of Communication Networks and Distributed Systems, Inderscience Publishers, vol. 4, no. 3, pp. 331–344, 2010. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |