DOI:10.32604/cmc.2022.019217
| Computers, Materials & Continua DOI:10.32604/cmc.2022.019217 | |
| Article |
PSO Based Multi-Objective Approach for Controlling PID Controller
1Indian Institute of Information Technology, Nagpur, India
2School of Computing & Information Technology, Manipal University, Jaipur (Rajasthan), India
3Faculty of Computing and Informatics, University Malaysia Sabah, Jalan UMS, 88400, Kota Kinabalu Sabah, Malaysia
4Faculty of Computing & Informatics, Multimedia University, Persiaran Multimedia, 63100, Cyberjaya, Selangor, Malaysia
5Maulana Azad National Institute of Technology, Bhopal, India
6Department of Electronics and Communication Engineering, JECRC University, Jaipur (Rajasthan), India
*Corresponding Author: Ag. Asri Ag. Ibrahim. Email: awgasri@ums.edu.my
Received: 06 April 2021; Accepted: 21 June 2021
Abstract: CSTR (Continuous stirred tank reactor) is employed in process control and chemical industries to improve response characteristics and system efficiency. It has a highly nonlinear characteristic that includes complexities in its control and design. Dynamic performance is compassionate to change in system parameters which need more effort for planning a significant controller for CSTR. The reactor temperature changes in either direction from the defined reference value. It is important to note that the intensity of chemical actions inside the CSTR is dependent on the various levels of temperature, and deviation from reference values may cause degradation of biomass quality. Design and implementation of an appropriate adaptive controller for such a nonlinear system are essential. In this paper, a conventional Proportional Integral Derivative (PID) controller is designed. The conventional techniques to deal with constraints suffer severe limitations like it has fixed controller parameters. Hence, A novel method is applied for computing the PID controller parameters using a swarm algorithm that overcomes the conventional controller's limitation. In the proposed technique, PID parameters are tuned by Particle Swarm Optimization (PSO). It is not easy to choose the suitable objective function to design a PID controller using PSO to get an optimal response. In this article, a multi-objective function is proposed for PSO based controller design of CSTR.
Keywords: Particle swarm optimization; multi-objective PSO; continuous stirred tank reactor; proportional integral derivative controller
The domain of Chemical engineering always carriages more significant challenges to prevent environmental pollutants and protect its stability with the use of various modeling and control methods. In addition, it can significantly profit the living style and health conditions of humans [1–4]. CSTR is a fundamental process system significantly employed in various process industries as well as chemical plants. It has a highly nonlinear characteristic, which is why it involves complexities in its design and control. Dynamic behavior is highly sensitive to variation in system parameters, requiring more effort to design a suitable controller for CSTR [5–7]. In process industries, conventional PID controllers are widely used in different applications if the process is linear and time-invariant [8,9]. Calculation of the PID gains using several tuning methods has been proposed. Firstly, the classical tuning law was given by Ziegler and Nichols, and another method was proposed by Cohen [10].
In these conventional offline PID tuning methods, tuning of PID parameters are often not suitable for nonlinear and time-varying systems [11]. In such a system, the system parameters are normally changed with the time that needs continuous monitoring and online PID tuning accordingly. Due to this problem, various control techniques based on metaheuristic methods have been employed to find the optimum solution and enhance the controller's performance. These AI techniques comprised of Differential Evolution (DE) algorithm [12–15], Genetic Algorithm (GA), PSO, and Artificial Bee Colony (ABC) [16–19]. Even Nowadays, scientists and researchers are using AI techniques for solving future-driven network security attacks like distributed denial of service (DDoS) attacks [20–23]. Furthermore, AI can implement using software-defined networking [SDN] [24–31], named data networking (NDN) [32–34] and cloud computing network [35] with voice over IP (VoIP) [36–39] fiber optic [40–42], worldwide interoperability for microwave access (WiMAX) [43–45], swarm intelligence (SI) [46], Deep learning (DL) [47], robotic system [48], and Satellite [49]. In order to estimate the PID controller performance, an objective function is used in the AI techniques as mentioned above. A performance criterion that decides the optimal solutions is selected as an objective function.
Most of the functions are obtained from the analysis of error signals ranging among the desired output and the input signal of a system [50]. Performance indices in terms of system error are defined as Integral of Squared Error (ISE), Mean Square Error (MSE), Integral of Absolute Error (IAE), Integral of Time Multiplied by Absolute Error (ITAE), Integral of Squared Time Multiplied by Squared Error (ISTE) and Integral of Time Multiplied by Squared Error (ITSE). IAE and ISE criteria weigh all errors consistently over time. Therefore, it may respond with enormous settling time ts and less overshoot Mp, which ITAE and ITSE can overcome, but the desired stability margin is uncertain. Zwe-Lee introduced a new performance criterion based on time response specifications of the system's step response [51]. Zamani et al. projected a generalized performance measure to ease the regulator of time and frequency domain conditions [52]. Eight terms objective function has been introduced with two frequency parameters in above mention papers. A weighting factor determines the importance of each term.
On the other hand, the weighting factor's selection for the objective function is a challenging job. This manuscript is objectively focused on the temperature control of the reactor. In the presented methodology, the temporary reaction of a plant is superior by scheming an appropriate PID controller. Multi-objective PSO MOPSO-PID optimization algorithm is recovering rise time tr, settling time ts, and maximum overshoot Mp. The remaining of the manuscript is organized as below. Section 2 discusses the mathematical modeling of the reactor in elaborated form. Section 3 shows the regulator of the reactor based on the traditional PID controller. Section 4 shows the Design of an Adaptive PSO-based PID controller and Proposed MOPSO-PID Controller, and Section 5 is based on the comparative study of results obtained by diverse control systems. Lastly, a summarized inference is discussed in Section 6.
The conventional approaches to deal with constraints suffer severe limitations and hence are the motivation of researchers to seek more flexible and powerful algorithms. A recent approach was Bio-inspired intelligent computing that from its starting was continuously installed in various applications. Fuzzy logic has come as a powerful tool to mitigate the issues mentioned. The global interest in fuzzy logic demonstrates the academic and industrial performances of approximate reasoning over crisp assumption models in real environment applications. The fuzzy controllers in their industrial implementation are employed as intelligent controllers in real controlling applications. With low computational cost, fuzzy logic is highly flexible in dealing with complex non-linear problems. The performances are strictly according to the expertise of a developer that generates rules basis and hence is a subject of interest for most researchers [53].
The adaptive approaches for controlling the non-linear CSTR system depend on its parameters according to the system's actual state during control. The polynomial approaches are confronted for controller design, and the satisfaction of initial control requirements is considered. Moreover, the systems with negative properties (for example, non-minimum phase behavior or process that consumes additional time) provide more accurate outputs. The subsidiary pole placement method also furnishes the requirements such as stability, asymptotic tracking of reference signals, and compensation of disturbances [54–56]. The objective is to control the temperature and concentration in CSTR. In the proposed approach, the transient response of the CSTR plant is improved by designing suitable controllers like PID and adaptive PID controllers using PSO optimization algorithms by achieving less tr, ts, and overshoot.
Utmost commonly employed chemical reactors in the industry are the entirely agitated and irreversible exothermic with CSTR. The system comprises a reactor with a cooling cover. The dissolution process of a manufactured item ‘A’ into another manufactured item ‘B’ arises in the CSTR and is shown in Fig. 1. Generally, the response is heat-releasing. So, the temperature should be managed through flowing liquid and the cooling jacket that encloses the reactor wall. The primary purpose is to adjust the concentration
CSTR Modeling
The progress of the preliminary model is founded on some assumptions: This is entirely restless; the mass density of the input module is denoted by
where, k (reaction rate)
By Arrhenius law:
The dynamic performance of the device is depicted through generalized nonlinear differential Eq. (3):
where,
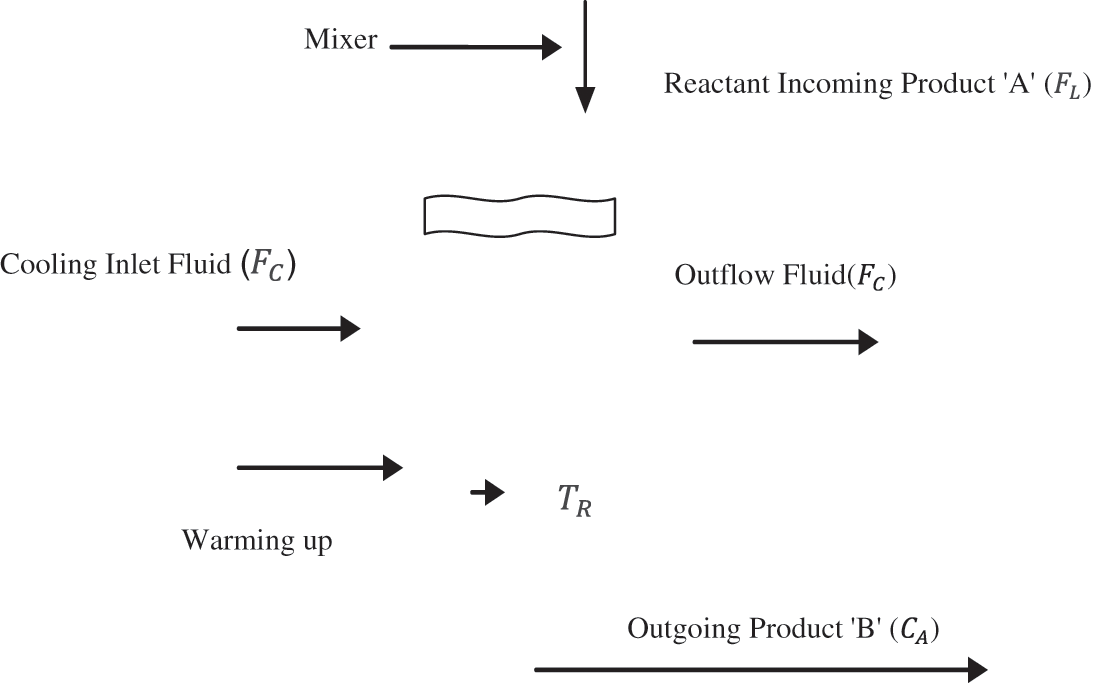
Figure 1: Strategic diagram for the CSTR
The second-order transfer function of the CSTR plant, commonly used for simulation studies for standard data specification, is obtained below [12,18].
The schematic design of the control scheme for CSTR is presented in Fig. 2. In this article, the key objective is to stabilize and regulate the reactor's temperature. The desired step r(t) input is applied, then response c(t) of the reactor is managed by auto-tuned PID controller through a feedback loop. Consequently, an error e(t) is caused by comparing the required temperature and the actual temperature of the reactor, which is fed to the PID controller. The optimized values of controller parameters are calculated by PSO using the objective function defined by Eq. (11). The corresponding response is the novel set theme or the plant's input temperature. The reactor is then deployed accordingly to set a new value of temperature until the error is minimized. The performance of the reactor is analyzed in terms of time response specifications settling time ts, rise time tr and maximum overshoot Mp.
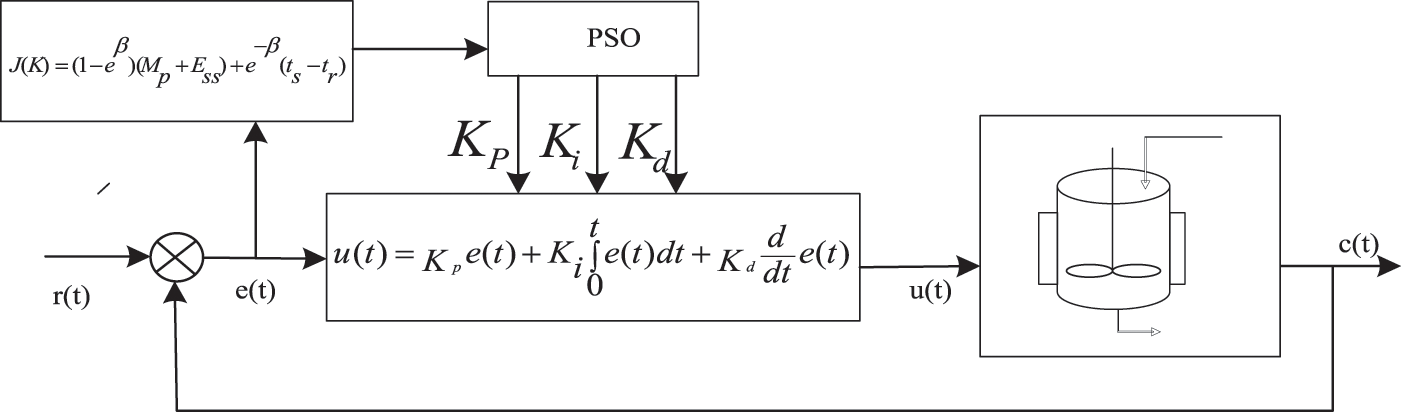
Figure 2: Plan diagram for CSTR
5 Design of Adaptive PSO Based PID Controller
This section first describes the working of conventional PID controllers and mentions the parameters to be tuned by PSO. Finally, the proposed Multi-objective PSO (MOPSO) based adaptive PID controller design is presented in detail. The control signal generated by the controller is the function of these tuning parameters
t: Time
These PID parameters are chosen to meet prescribed performance criteria for system response. This paper emphasizes the applications of PSO for tuning the controller. This algorithm (inherently) calculates PID parameters’ values based on their prior states [9–11]. Analysis of the process control system is generally based on its transient (dynamic) response. Several time-domain specifications are utilized for the investigation of the step response. These parameters are tr, ts, Mp, and steady-state error Ess. The system's step response can be improved by optimizing the time domain specification, which depends on the designing suitable controller. Two significant factors can express the transient response of the CSTR; firs, t the speed of response (characterized by the tr and tp), and second is the nearness of the response to the reference input (represented by the Mp and ts) [3,21]. The error signal is given by (6) as below:
The IAE and ISE weight all errors are objective of time. Hence, optimizing the response using ISE and IAE can occur in small ts but prominent Mp or vice versa. Thus, ITAE and ITSE conquer the drawback of the IAE and ISE. Further, ITSE and ITAE are trying to reduce the squared error signals and weighted absolute, respectively. However, it is not necessary to minimize all the response specifications such as Ess, Mp, tr, and ts at the same time. Therefore, the multi minimum problem can be overcome by using a weighted sum of frequency and time response specifications objective functions. M. R. Haque et al. [21] presented the performance criterion described by the objective function of Eq. (7).
This fitness function is optimized to tune the PID parameters for getting the minimum values of time response specifications. To get the appropriate values of
where,
Proposed MOPSO-PID Controller
In 1995, the heuristic method PSO was proposed by James Kennedy. As shown in Fig. 3, the candidate resolution of the existing search space for the evaluation is completed by the repetition procedure. In order to fit the task's requirements, minima and maxima of the objective function are obtained by the candidate's solution. PSO does not allow the objective function in the form of its inputs, so the minimum and maximum (locally/globally) are randomly away from the solution. The user does not know the solution. At each level, the position and speed of the candidate's solution are kept; also, update fitness value. PSO has recorded the best value of fitness on behalf of a specific confirmation. The other specific distinct approach to this value is the most acceptable solution and situation. This value is recognized during the global best candidate solution along with the global best position. The up-gradation of best fitness value is carried out, local and global best fitness values are substituted if required. For the best performance of PSO's optimization, the up-gradation of position and speed is essential. By using Eq. (7) updated each particle's velocity [17–19].
PSO is initialized with the first position and velocity using random solutions, which is named the swarm. PSO algorithm has three steps. Which following three steps are iterated until the criterion of termination is done:
Step 1: Evaluate the fitness of each particle which is by the Multi-objective performance criterion.
Step 2: Accordance with achieved best positions, update every particle by two values.
(1) The best solution (fitness) achieved so far is named pbest.
(2) The best value obtained so far by any particle in the population named as gbest.
Step 3: Update the position and velocity of every particle. The velocity and position are updated as follows:
where g(t), xi(t), xi (t), and vi (t) represent the global best, position, personal best and velocity, respectively of n dimension of it h particle, c1 and c2 are acceleration coefficients, r1 and r2 are uniformly distributed random no. in the interval [0,1], X is the constriction factor [3,21]. In this work, a PID controller is designed with the help of MOPSO to enhance the performance of reactor. The PSO is specifically used to find out appropriate tuning parameters Kp, Ki, and Kdsuch that the optimal performance of the controller can be achieved. Individual string and Evaluation function can be described as follows:
(a) Individual String: The controller parameters compose an individual K such as K= [Kp KiKd]; hence, there are 3 members of an individual. These members are chosen as true values. The dimension of a population is n × 3 because there are n individuals in a population.
(b) Evaluation Function: The evaluation value of each individual in the population defined by Eq. (13). The performance criterion J(k) as in Eq. (7) is a reciprocal of the evaluation function ‘f’ as in Eq. (13). It means the higher J(k) the value of individual k, the smaller its evaluation value. The evaluation function is given by Eq. (13).
This work proposes a MOPSO-PID controller for probing the optimized values of PID controller parameters Kp, Kiand Kdwith the help of PSO for CSTR. Each individual K comprises 3 members Kp, Kiand Kd. The searching phenomena of the designed MOPSO-PID controller are given as under:
Step 1. Upper bounds (Ub) and lower bounds (Lb) for the PID tuning parameters are specified and initialize the individuals of the population randomly along with searching, velocities, pbest and gbest.
Step 2. For every initial individual K of the population, apply the Routh-Hurwitz criterion to examine the stability of closed-loop plant and determine the values of the response specifications namely Mp, Ess, tr and ts.
Step 3. In the population, measure the evaluation value of each individual using the Eq. (13).
Step 4. Each individual's estimation value is compared with its pbest. The best estimation value between the pbest is indicated as gbest.
Step 5. According to Eq. (9) improve the member velocity ‘
if
if
Step 6. Adjust the position of member for each individual “K” by Eq. (10)
where
Step 7. If the no. of repetitions approaches the highest, then go to step 8. If not, go to step 2.
Step 8. gbest is the optimal controller tuning parameter generated by the individual [6,20,22], presented in Fig. 3.
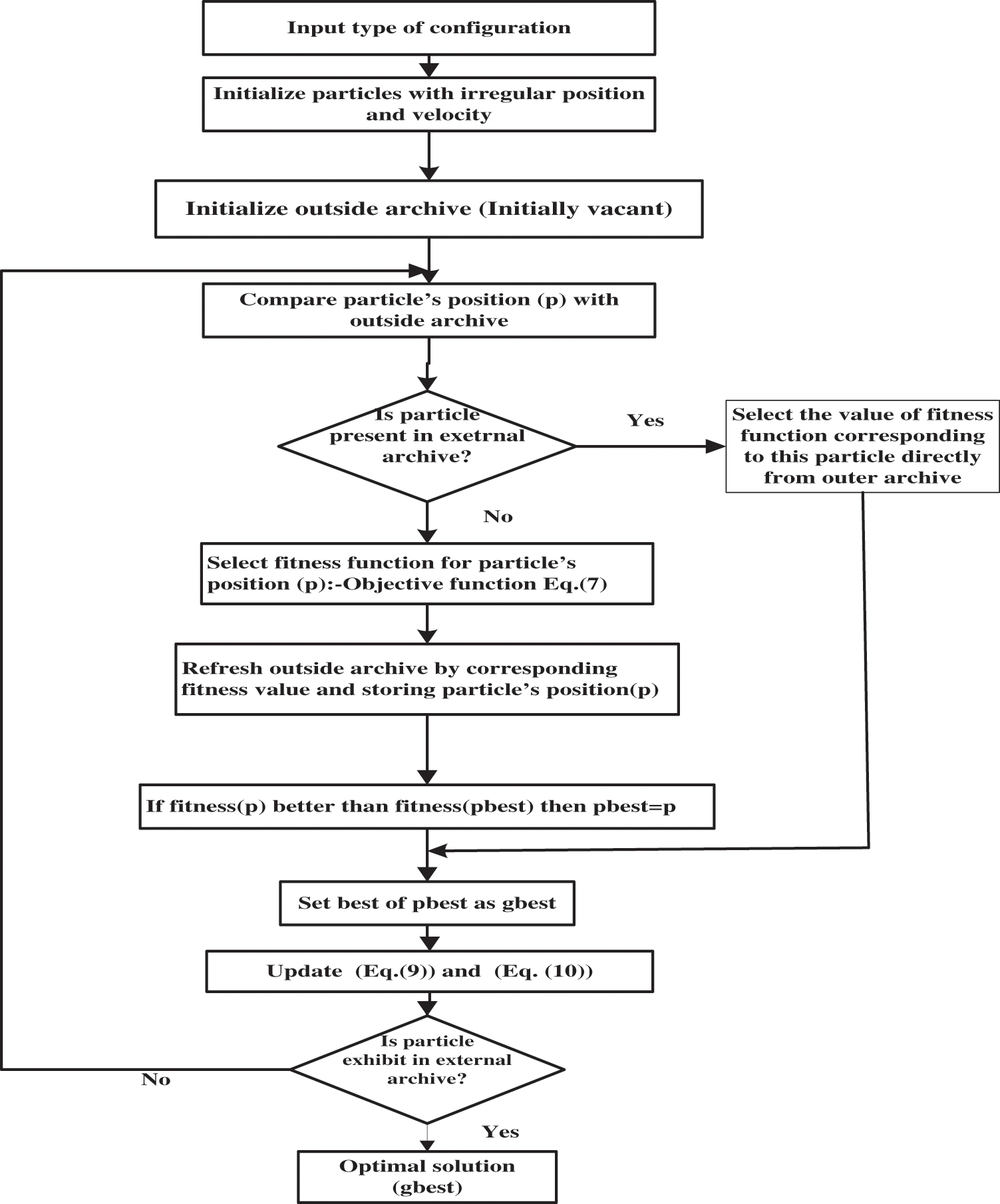
Figure 3: Tuning of controller parameters using PSO
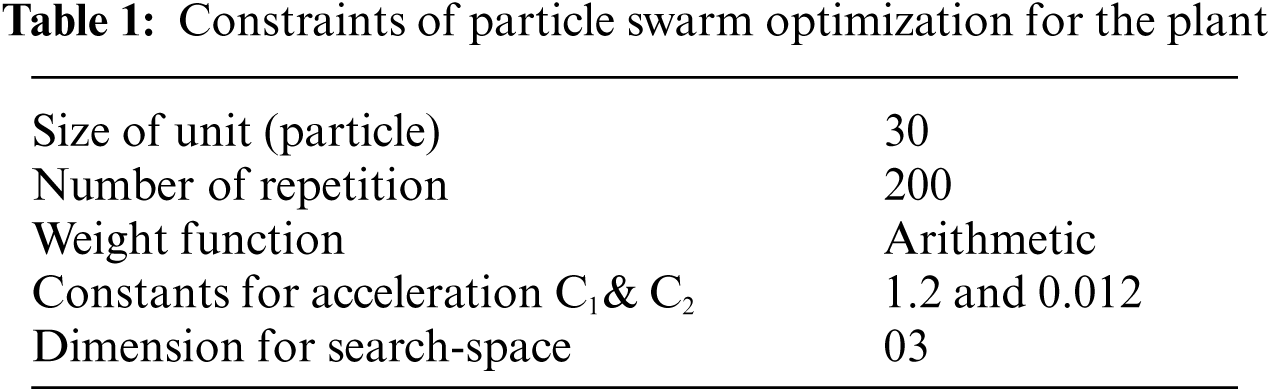
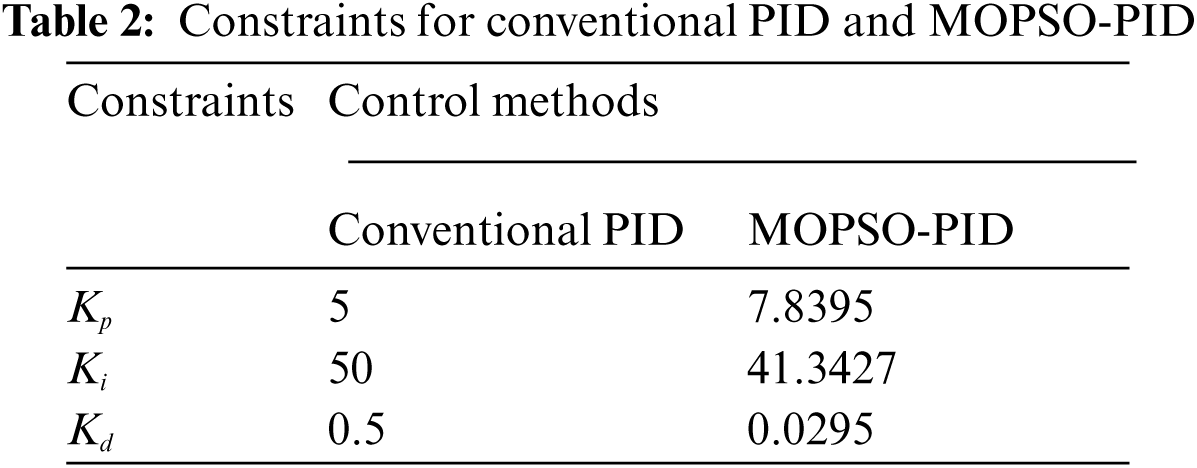
This segment shows outcomes by MATLAB programming, and a comparative investigation is completed to express the supremacy of the projected MOPSO control system. MATLAB programming is done for the parameters of CSTR given in the appendix. Initial parameters of the PID controller and PSO algorithm for visual examination are shown in Tabs. 1 and 2. PID controller parameters presented in Tab. 2 for conventional PID are found by the offline tuning method (Z-N).
CSTR Performances with Different Controllers
The time response curve of Fig. 4 shows the performance of CSTR with conventional PID and proposed MOPSO-PID. The preliminary temperature of the reactor is considered as 40oF. The desired temperature is set to 80oF. It can be observed that without any controller, the reactor temperature is not reaching its desired value. With the application of a conventional PID controller, the desired temperature is achieved, but there is an overshoot of 14.46%, while with the proposed MOPSO-PID controller, this overshoot is reduced to 2.14%. The minimization of error takes a response time of 0.42 sec by MOPSO-PID for achieving the required temperature of 80°F.
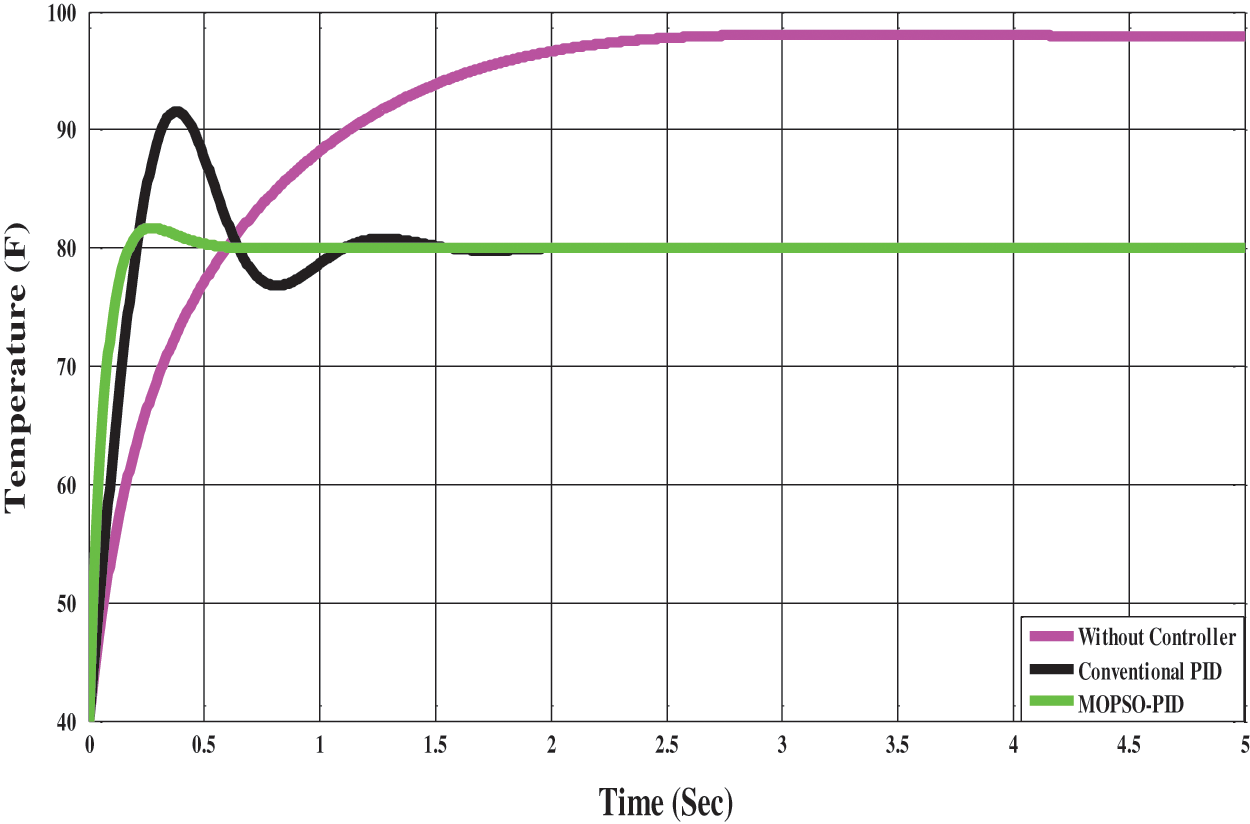
Figure 4: Comparative analysis using temperature vs. time graph
The CSTR system's response for without controller, conventional PID, and the MOPSO-PID controller have been depicted in Fig. 5. PID controller displays settling at 1.5 sec & MOPSO-PID displays the steady condition at 0.25 sec. The error reduced to zero after 0.5 s by MOPSO-PID, as revealed in Fig. 6. Without any controller, ITAE and MSE are high with 15428.3682 and 267.6768, respectively, and with PID controller, error values of ITAE and MSE are 1642.1107 and 26.7112, respectively, as shown in Tab. 3. It clarifies that the appropriate performance index can be achieved by implementing the proposed control scheme to CSTR. It shows that using a conventional PID controller for such a nonlinear system cannot produce satisfactory results while the help of adaptive mechanism desires performance can be achieved. Figs. 7 and 8 reveals that tr, tp, ts,as well as Mpare minimized due to the addition of the PID controller with Multi-Objective PSO. This is found that the fault figures should also decrease to a large extent.
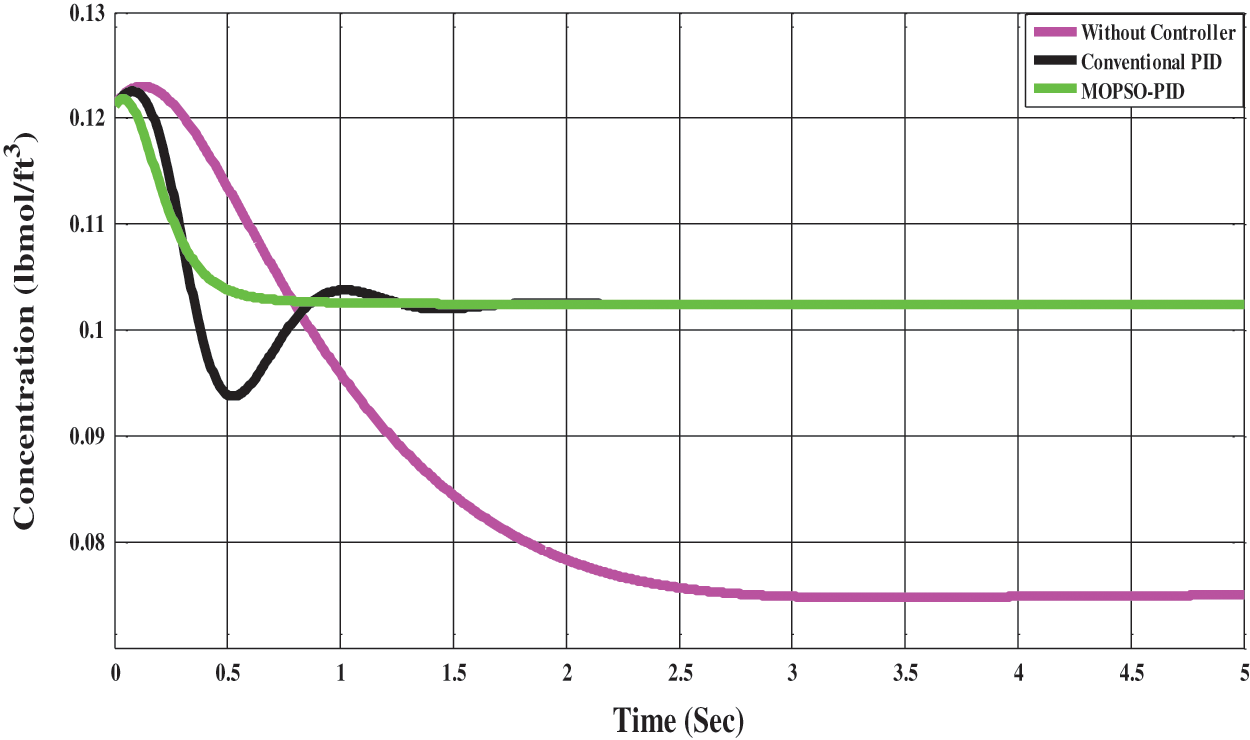
Figure 5: Comparison of the concentration of CSTR system
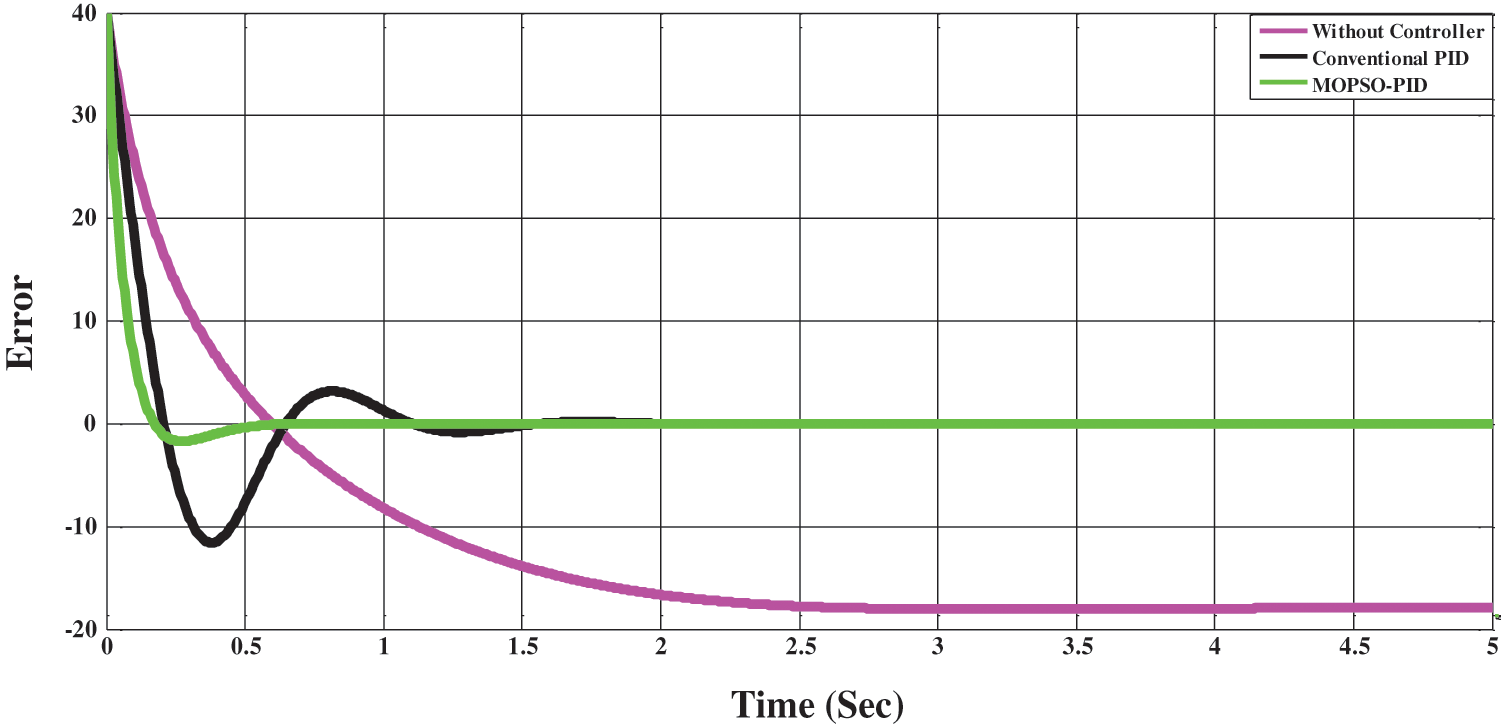
Figure 6: Comparative analysis using error vs. time graph
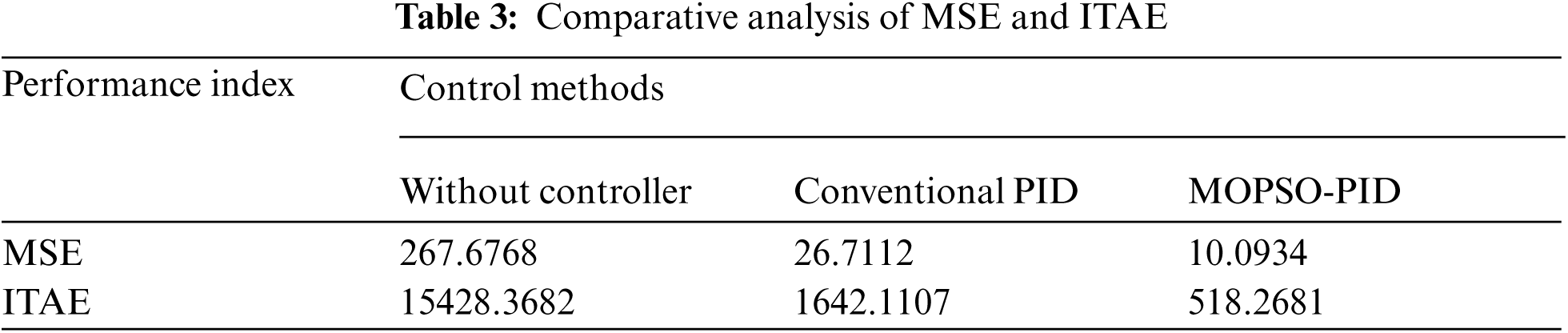
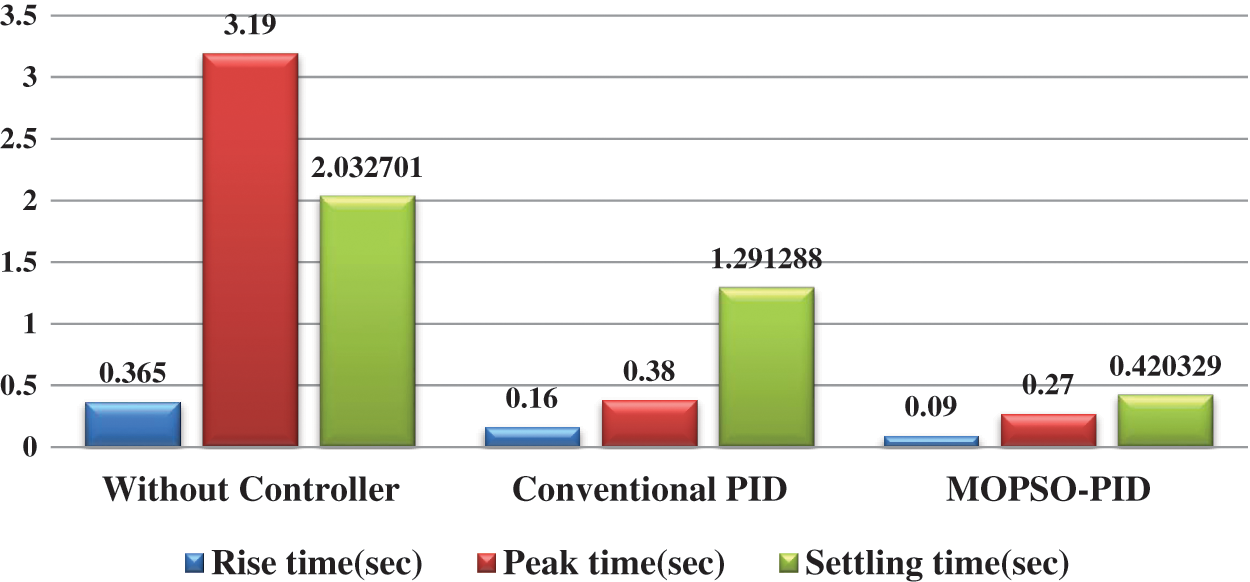
Figure 7: Evaluation of different approaches for response specifications
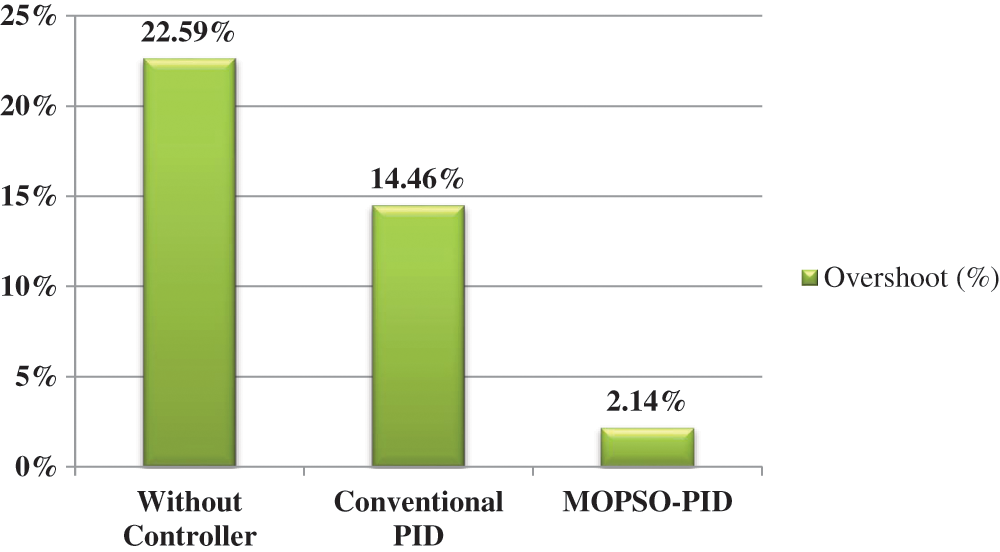
Figure 8: Assessment of overshoot by different control systems
This paper projected a temperature control technique due to the abrupt change in flow rate and temperature. The controller wants to be precisely adjusted to maintain the response temperature of the reactor at reference value. A novel approach is employed for calculating the PID controller parameters with the usage of the swarm algorithm. The proposed technique MOPSO-PID controller, integrates the new time-response specification with the PSO algorithm. The results graphically and analytically are analyzed using the reactor transfer function time response subjected to a unit step function. There is a remarkable improvement in more petite tr, tp, ts, and a lower Mp overshoot. Simulation results justify that the proposed MOPSO-PID controller can highly improvise the PID tuning optimization in comparison with a conventional PID controller.
Acknowledgement: The authors would like to thank the editors of CMC and anonymous reviewers for their time and review of this manuscript and Professor Dr. Yong-Jin Park (IEEE Life member and former Director IEEE Region 10) valuable comments and suggestions on improving the paper.
Funding Statement: University Malaysia Sabah fully funds this research under the grant number F08/PGRG/1908/2019, Ag. Asri Ag. Ibrahim received the grant, sponsors’ websites: https://www.ums.edu.my.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. A. Norelys and A. D. Manuel, “Fractional adaptive control for an automatic voltage regulator,” ISA Transactions, vol. 52, no. 6, pp. 807–815, 2013. [Google Scholar]
2. W. M. Ali, Z. S. Hegazy and M. Khorshid, “An alternative differential evolution algorithm for global optimization,” Journal of Advanced Research, vol. 3, no. 2, pp. 149–165, 2012. [Google Scholar]
3. A. M. Sahib and B. S. Ahmed, “A new multi objective performance criterion used in PID tuning optimization algorithms,” Journal of Advanced Research, vol. 7, no. 1, pp. 125–134, 2016. [Google Scholar]
4. Z. Yuan, B. Chen and J. Zhao, “An overview on controllability analysis of chemical processes,” American Institute of Chemical Engineers (AIChE) Journal, John Wiley & Sons, Inc, USA, vol. 57, no. 5, pp. 1185–1201, 2011. [Google Scholar]
5. M. Bahita and K. Belarbi, “Model reference neural-fuzzy adaptive control of the concentration in a chemical reactor (CSTR),” IFAC-PapersOnLine, Elsevier B.V., vol. 49, no. 29, pp. 158–162, 2016. [Google Scholar]
6. M. Clerc and J. Kennedy, “The particle swarm-explosion, stability, and convergence in a multidimensional complex space,” IEEE Transactions on Evolutionary Computation, vol. 6, no. 1, pp. 58–73, 2002. [Google Scholar]
7. M. Pottman and D. E. Seborg, “Identification of non-linear processes using reciprocal multiquadric functions,” Journal of Process Control, vol. 2, no. 4, pp. 189–203, 1992. [Google Scholar]
8. D. Zhang and B. Wei, “Convergence performance comparisons of PID, MRAC, and PID+ MRAC hybrid controller,” Frontiers of Mechanical Engineering in China, vol. 11, no. 2, pp. 213–217, 2016. [Google Scholar]
9. H. R. Ossareh, S. Wisotzki, J. B. Seeds and M. Jankovic, “An internal model control-based approach for characterization and controller tuning of turbocharged gasoline engines,” IEEE Transactions on Control Systems Technology, vol. 29, no. 2, pp. 866–875, 2021. [Google Scholar]
10. P. K. Srinivas, V. Lakshmi and V. N. Kumar, “A comparison of PID controller tuning methods for three tank level process,” International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering (IJAREEIE), vol. 3, no. 1, pp. 6810–6820, 2014. [Google Scholar]
11. H. Goud and P. Swarnkar, “Investigations on metaheuristic algorithm for designing adaptive PID controller for continuous stirred tank reactor,” MAPAN-Journal Metrology Society of India, vol. 34, no. 1, pp. 113–119, 2019. [Google Scholar]
12. H. Goud and P. Swarnkar, “Signal synthesis model reference adaptive controller with genetic algorithm for a control of chemical tank reactor,” International Journal of Chemical Reactor Engineering, vol. 17, no. 7, pp. 1–11, 2019. [Google Scholar]
13. R. Bindu and K. Mini, “Tuning of PID controller for DC servo motor using genetic algorithm,” International Journal of Emerging Technology and Advanced Engineering, vol. 2, no. 3, pp. 310–314, 2012. [Google Scholar]
14. A. C. Coello, G. T. Pulido and M. S. Lechuga, “Handling multiple objectives with particle swarm optimization,” IEEE Transactions on Evolutionary Computation, vol. 8, no. 3, pp. 256–279, 2004. [Google Scholar]
15. R. A. Krohling and J. P. Rey, “Design of optimal disturbance rejection PID controllers using genetic algorithms,” IEEE Transactions on Evolutionary Computation, vol. 5, no. 1, pp. 78–82, 2001. [Google Scholar]
16. C. Chyi-Tsong and D. Chyi-Shen, “Robust controller design for a class of nonlinear uncertain chemical processes,” Journal of Process Control, vol. 11, no. 5, pp. 469–482, 2001. [Google Scholar]
17. S. Taran, P. C. Sharma and V. Bajaj, “Automatic sleep stages classification using optimize flexible analytic wavelet transform,” Knowledge-Based Systems, Elsevier, vol. 192, pp. 1–8, 2020. [Google Scholar]
18. H. Goud and P. Swarnkar, “Signal synthesis model reference adaptive controller with artificial intelligent technique for a control of continuous stirred tank reactor,” International Journal of Chemical Reactor Engineering, vol. 17, no. 2, pp. 1–1.1, 2018. [Google Scholar]
19. P. Sidhartha, “Differential evolution algorithm for SSSC-based damping controller design considering time delay,” Journal of the Franklin Institute, vol. 348, no. 8, pp. 1903–1926, 2011. [Google Scholar]
20. M. R. Haque, S. C. Tan, Z. Yusoff, K. Nisar, C. K. Lee et al., “Automated controller placement for software-defined networks to resist DDoS attacks,” Computers, Materials & Continua, Tech Science Press, Henderson, Nevada, USA, vol. 68, no. 3, pp. 3147–3165, 2021. [Google Scholar]
21. M. R. Haque, S. C. Tan, Z. Yusoff, C. K. Lee and R. Kaspin, “DDoS attack monitoring using smart controller placement in software defined networking architecture,” in R. Alfred, Y. Lim, A. Ibrahim, P. Anthony (eds.Computational Science and Technology, Lecture Notes in Electrical Engineering, vol. 481, Singapore: Springer, 2018. [Google Scholar]
22. M. R. Haque, S. C. Tan, Z. Yusoff, C. K. Lee, S. Ali et al., “Motivation of DDoS attack-aware in software defined networking controller placement,” in IEEE Int. Conf. on Computer and Applications (ICCA), Dubai, pp. 36–42, 2017. [Google Scholar]
23. M. R. Haque, S. C. Tan, Z. Yusoff, K. Nisar, R. Kaspin et al., “Unprecedented smart algorithm for uninterrupted SDN services during DDoS attack,” Computers, Materials & Continua, Tech Science Press, vol. 70, no. 1, pp. 875–894, 2022. [Google Scholar]
24. K. Nisar, E. R. Jimson, M. H. A. Hijazi and S. K. Memon, “A survey: Architecture, security threats and application of SDN,” Journal of Industrial Electronics Technology and Application, Daegu University, Republic of Korea, vol. 2, no. 1, pp. 64–69, 2019. [Google Scholar]
25. K. Nisar, G. Chen and A. Sarrafzadeh, “A review: Software defined networks management,” Network Research Workshop, Proceedings of the Asia-Pacific Advanced Network (APAN), Fukuoka, Japan, vol. 39, pp. 1–09, 2015. [Google Scholar]
26. M. R. Haque, S. C. Tan, Z. Yusoff, K. Nisar, C. K. Lee et al., “A novel DDoS attack-aware smart backup controller placement in SDN design,” Annals of Emerging Technologies in Computing, London, UK, vol. 4, no. 5, pp. 75–92, 2020. [Google Scholar]
27. N. F. Ali, A. M. Said, K. Nisar and I. A. Aziz, “A survey on software defined network approaches for achieving energy efficiency in wireless sensor network,” in IEEE Conf. on Wireless Sensors (ICWiSe), Miri, Malaysia, pp. 28–33, 2017. [Google Scholar]
28. K. Nisar, M. H. A. Hijazi and A. A. A. Ibrahim, “A new model for virtual machine migration with software defined networking,” in The Fourth Int. Conf. on Computing Science, Computer Engineering, and Education Technologies (CSCEET2017), Beirut, Lebanon, April 2017. [Google Scholar]
29. M. R. Haque, S. C. Tan, Z. Yusoff, C. K. Lee and R. Kaspin, “Smart controller placement for uninterrupted software defined networking service under ddos attack in rf, data center and telecom industries,” International Journal of Advanced Science and Technology (IJAST), Australia, vol. 28, no. 15, pp. 275–288, 2019. [Google Scholar]
30. M. R. Haque, S. C. Tan, C. K. Lee, Z. Yusoff, S. Ali et al., “Analysis of DDoS attack-aware software-defined networking controller placement in Malaysia,” in J. Alja’am, A. El Saddik, A. Sadka (eds.Recent Trends in Computer Applications, Cham, Switzerland: Springer International Publishing AG, Springer Nature, pp. 175–188, 2018. [Google Scholar]
31. E. R. Jimson, K. Nisar and M. H. A. Hijazi, “The state of the art of software defined networking (SDN) issues in current network architecture and a solution for network management using the SDN,” International Journal of Technology Diffusion, (IJTD), IGI Global Publishers, USA, vol. 10, no. 3, pp. 33–48, 2019. [Google Scholar]
32. A. A. A. Ibrahim and K. Nisar, “Future internet and named data networking hourglass, packet and node architecture,” Journal of Industrial Information Technology and Application, Daegu University, Republic of Korea, vol. 2, no. 3, pp. 115–123, 2018. [Google Scholar]
33. S. Zhang, Z. Yan, Y. Park, H. Nakazatod, W. Kameyama et al., “Efficient producer mobility support in named data networking,” The Institute of Electronics, Information and Communication Engineers, IEICE Transactions, Tokyo, Japan, vol. E100-B, no. 10, pp. 1856–1864, 2017. [Google Scholar]
34. S. Harada, Z. Yan, Y. Park, K. Nisar and A. A. A. Ibrahim, “Data aggregation in named data networking,” in IEEE Region 10 Conf. (TENCON), Malaysia, pp. 1839–1842, 2017. [Google Scholar]
35. Y. Zhang, X. Lan, J. Ren and L. Cai, “Efficient computing resource sharing for mobile edge-cloud computing networks,” IEEE/ACM Transactions on Networking, vol. 28, no. 3, pp. 1227–1240, 2020. [Google Scholar]
36. K. Nisar, A. Amphawan, S. Hassan and N. I. Sarkar, “A comprehensive survey on scheduler for VoIP over WLANs,” Journal of Network and Computer Applications, (JNCA), Norman, OK, USA, vol. 36, no. 2, pp. 933–948, 2013. [Google Scholar]
37. F. Sattar, M. Hussain and K. Nisar, “A secure architecture for open source VoIP solutions,” in Int. Conf. on Information and Communication Technologies, Pakistan, pp. 1–6, 2011. [Google Scholar]
38. K. Nisar, A. M. Said and H. Hasbullah, “Enhanced performance of packet transmission using system model over VoIP network,” in Int. Symp. on Information Technology (ITSim0), Kuala Lumpur, Malaysia, pp. 1005–1008, 2010. [Google Scholar]
39. N. I. Sarkar, K. Nisar and L. Babbage, “Performance studies on campus-wide focus on ftp, video and VoIP ethernet network,” International Journal of Advanced Pervasive and Ubiquitous Computing, (IJAPUC), IGI Global Publishers, USA, vol. 4, no. 1, pp. 49–59, 2012. [Google Scholar]
40. S. Chaudhary, A. Amphawan and K. Nisar, “Realization of free space optics with OFDM under atmospheric turbulence,” Optik, vol. 125, no. 18, pp. 5196–5198, 2014. [Google Scholar]
41. A. Amphawan, V. Mishra, K. Nisar and B. Nedniyom, “Real-time holographic backlighting positioning sensor for enhanced power coupling efficiency into selective launches in multimode fiber,” Journal of Modern Optics, Taylor & Francis Group, UK, vol. 59, no. 20, pp. 1745–1752, 2012. [Google Scholar]
42. R. Singh and G. Soni, “Realization of OFDM based free space optics,” in Int. Conf. on Green Computing and Internet of Things (ICGCIoT), Noida, pp. 32–35, 2015. [Google Scholar]
43. J. Shuja, R. W. Ahmad, A. Gani, A. I. A. Ahmed, A. Siddiqa et al., “Greening emerging IT technologies: Techniques and practices,” Journal of Internet Services and Applications (JISA), Springer, London, UK, vol. 8, no, no. 9, pp. 01–11, 2017. [Google Scholar]
44. I. A. Lawal, A. M. Said, K. Nisar and A. A. Mu'azu, “A distributed QoS-oriented model to improve network performance for fixed WiMAX,” International Journal on Recent Trends in Engineering and Technology, Association of Computer Electronics and Electrical Engineers, ACEEE, vol. 10, no. 1, pp. 186–202, 2014. [Google Scholar]
45. I. A. Lawal, A. M. Said, K. Nisar, P. A. Shah and A. r. A. Mu'azu, “Throughput performance improvement for VoIP applications in fixed WiMAX network using client–server model,” Journal of Science International-Lahore, Pakistan, vol. 26, no. 3, pp. 999–1002, 2014. [Google Scholar]
46. S. Pervaiz, W. H. Bangya, A. Ashraf, K. Nisar, M. R. Haque et al., “Comparative directions of particle swarm optimization algorithms using online networking database,” in Intelligent Automation & Soft Computing, Tech Science Press, Henderson, Nevada, USA, 2021. [Google Scholar]
47. N. Salam, M. K. Abbas, M. K. Maheshwari, B. Chowdhry and K. Nisar, “Future mobile technology: Channel access mechanism for LTE-lAA using deep learning,” in 2021 IEEE 18th Annual Consumer Communications & Networking Conf. (CCNC), Las Vegas, NV, USA, pp. 1–5, 2021. [Google Scholar]
48. I. Haider, K. B. Khan, M. A. Haider, A. Saeed and K. Nisar, “Automated robotic system for assistance of isolated patients of coronavirus (COVID-19),” in 2020 IEEE 23rd Int. Multitopic Conf. (INMIC), Bahawalpur, Pakistan, pp. 1–6, 2020. [Google Scholar]
49. M. R. Haque, S. C. Tan, Z. Yusoff, K. Nisar, C. K. Lee et al., “SDN architecture for UAVs and EVs using satellite: A hypothetical model and new challenges for future,” in IEEE 18th Annual Consumer Communications & Networking Conf. (CCNC), Las Vegas, NV, USA, pp. 1–6, 2021. [Google Scholar]
50. J. Liang, A. K. Qin, P. N. Suganthan and S. Baskar, “Comprehensive learning particle swarm optimizer for global optimization of multimodal functions,” IEEE Transactions on Evolutionary Computation, vol. 10, no. 3, pp. 281–295, 2006. [Google Scholar]
51. Z. Gaing, “A particle swarm optimization approach for optimum design of PID controller in AVR system,” IEEE Transactions on Energy Conversion, vol. 19, no. 2, pp. 384–391, 2004. [Google Scholar]
52. M. Zamani, M. Karimi-Ghartemani, N. Sadati and M. Parniani, “Design of a fractional order PID controller for an AVR using particle swarm optimization,” Control Engineering Practice, vol. 17, no. 12, pp. 1380–1387, 2009. [Google Scholar]
53. P. Swarnkar and H. Goud, “Design of fuzzy adaptive pi controller for inherently unstable system,” SSRN, Elsevier, vol. 1, no. 1, pp. 101–114, 2021. [Google Scholar]
54. L. Wang and J. Su, “Disturbance rejection control for non-minimum phase systems with optimal disturbance observer,” ISA Transactions, Elsevier B.V., vol. 57, pp. 1–9, 2015. [Google Scholar]
55. H. Goud and P. Swarnkar, “Analysis and simulation of the continuous stirred tank reactor system using genetic algorithm,” in N. Yadav, A. Yadav, J. Bansal, K. Deep, J. Kim (eds.Harmony Search and Nature Inspired Optimization Algorithms, Advances in Intelligent Systems and Computing, Singapore: Springer, vol. 741, pp. 1141–1151, 2019. [Google Scholar]
56. P. C. Sharma and N. S. Chaudhari, “A tree based novel approach for graph coloring problem using maximal independent set,” Wireless Personal Communications, Switzerland AG: Springer, Springer Nature, vol. 110, no. 3, pp. 1143–1155, 2020. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |