DOI:10.32604/cmc.2021.017800
| Computers, Materials & Continua DOI:10.32604/cmc.2021.017800 | |
| Article |
Multi-Layered Deep Learning Features Fusion for Human Action Recognition
1Department of Computer Science, HITEC University Taxila, Taxila, Pakistan
2College of Computer Science and Engineering, University of Ha’il, Ha’il, Saudi Arabia
3College of Computer Engineering and Sciences, Prince Sattam Bin Abdulaziz University, Al-Khraj, Saudi Arabia
4Department of Computer Science and Engineering, Soonchunhyang University, Asan, Korea
5Faculty of Applied Mathematics, Silesian University of Technology, Gliwice, Poland
6Department of Computer Science, COMSATS University Islamabad, Wah Campus, Pakistan
*Corresponding Author: Yunyoung Nam. Email: ynam@sch.ac.kr
Received: 11 February 2021; Accepted: 29 March 2021
Abstract: Human Action Recognition (HAR) is an active research topic in machine learning for the last few decades. Visual surveillance, robotics, and pedestrian detection are the main applications for action recognition. Computer vision researchers have introduced many HAR techniques, but they still face challenges such as redundant features and the cost of computing. In this article, we proposed a new method for the use of deep learning for HAR. In the proposed method, video frames are initially pre-processed using a global contrast approach and later used to train a deep learning model using domain transfer learning. The Resnet-50 Pre-Trained Model is used as a deep learning model in this work. Features are extracted from two layers: Global Average Pool (GAP) and Fully Connected (FC). The features of both layers are fused by the Canonical Correlation Analysis (CCA). Then features are selected using the Shanon Entropy-based threshold function. The selected features are finally passed to multiple classifiers for final classification. Experiments are conducted on five publicly available datasets as IXMAS, UCF Sports, YouTube, UT-Interaction, and KTH. The accuracy of these data sets was 89.6%, 99.7%, 100%, 96.7% and 96.6%, respectively. Comparison with existing techniques has shown that the proposed method provides improved accuracy for HAR. Also, the proposed method is computationally fast based on the time of execution.
Keywords: Action recognition; transfer learning; features fusion; features selection; classification
Human action Recognition (HAR) has incredible significance in numerous everyday applications, for instance, video surveillance [1], virtual reality, robotics, video analytics, and assistive living, etc. [2,3]. The movement of several body parts of a human being simultaneously can be referred to as an action [4,5]. According to the view of computer vision (CV), action recognition relates the observations such as video data with sequences [6]. A sequence of human actions accomplished by at least two actors in which one actor must be a person or an object is called interaction [7]. It has become a demanding task in CV to understand the human activities from videos. Automated recognition of an activity that being performed by human in a video sequences is the main capability of intelligent video system [8].
The main aim of action recognition is to supply useful information related to the subjects’ habits. Also, they permit the system or robot to make users comfortable with interacting with them. Recognition and forecasting the occurrence of crimes could be done by interpreting human activities to assist the police or other agencies in reacting straightaway [9]. The proper recognition of human actions accurately is extremely difficult due to lots of problems, e.g., jumbled backgrounds, changing environmental conditions, and viewpoint differences [10].
HAR techniques from video sequences are usually classified into two types- template-based method and model-based method. In template-based method, lower and middle-level features are emphasized. In the model-based method, high-level features are emphasized [11,12]. In the past few years, a large number of feature extraction methods are introduced, especially spatial-temporal interest points (STIP) feature descriptor [13], motion extraction image (MEI) and motion history image (MHI) [14], spatiotemporal descriptors based on 3-D gradients [15], extend robust scale features (SURF) [16], 3D SIFT [17], histogram oriented gradients (HOG) 3D [15] and dense optical trajectories [18] have achieved fruitful results for HAR using video sequences [19]. Then classification of these extracted features is done using different machine learning (ML) classification methods such as K-Nearest Neighbor (KNN), Support Vector Machine (SVM), decision tree, linear discriminant analysis (LDA), Ensemble tree and neural networks, etc.
Compared to the techniques above, significant performance was achieved after the deep convolutional neural network (DCNN) in machine learning [20,21]. Several pre-trained deep models are presented in the literature, such as AlexNet, VGG, GoogleNet, ResNet, and Inception V3. DCNN models can act directly on the raw inputs without any preprocessing [22]. More complex features can be extracted with every supplementary layer. A major dissimilarity in the complexity of adjoining layers of model reduces with the proceeding of the data to the upper convolutional layers. In recent years, these deep learning (DL) models are utilized for HAR and show high accuracy [23]. But sometimes, when humans have performed complex actions similar to each other, these models diminish the performance.
Therefore, some researchers presented sequential techniques. In those techniques, they performed fusion and get better information for an entire video sequence. Afza et al. [24] presented a parallel fusion approach named length control features (LCF) and achieved improved performance. Xiaog et al. [25] presented a two-stream CNN model for action recognition. They focused on both optical flow-based generated images and temporal actions for better action recognition. Elharrous et al. [26] presented a combined model for both action classification and summarization. They initially extract the human silhouette and then extract the shape and temporal features. In summary these methods computed improved results but they did not focused on the computational time. The major challenges which are handling in this work are: i) Change of human variation and viewpoint due to camera conditions, camera being static or dynamic; ii) Consumption of more time during the training process, and iii) Selection of the most related features is a key problem for minimizing error rate of an automated system. In this article, we proposed a fusion based framework along with a reduction scheme for better computational time and improved accuracy. Our major contributions are as follows:
(a) Global frames preprocessing is employed using mean and standard deviation values in a fitness function.
(b) Transfer learning-based features are extracted from two successive layers of Resnet50, where the numbers of parameters are the same as the original model.
(c) Canonical correlation approach is implemented for deep features fusion of both successive layers.
(d) A threshold function is implemented based on Shannon Entropy for the selection of best features.
(e) Multiple supervised learning algorithms are implemented for classification and also conducted a fair comparison with existing techniques.
The rest of the manuscript is organized as follows. The proposed methodology includes frame normalization, deep learning features, features fusion, and selection, presented in Section 2. Results are presented in Section 3, which followed the Conclusion of Section 4.
A unified model has been proposed in this article for HAR built on the fusion of multiple deep CNN layers features. Five core steps are involved in this work-database normalization, individual CNN features extraction through two successive layers, fusion information of both successive layers (AVG-Pool and FC1000), selection of best features, and finally classification through supervised learning method. The proposed method is evaluated on five datasets and also compared with existing techniques. Proposed architecture of this work has been illustrated in Fig. 1.
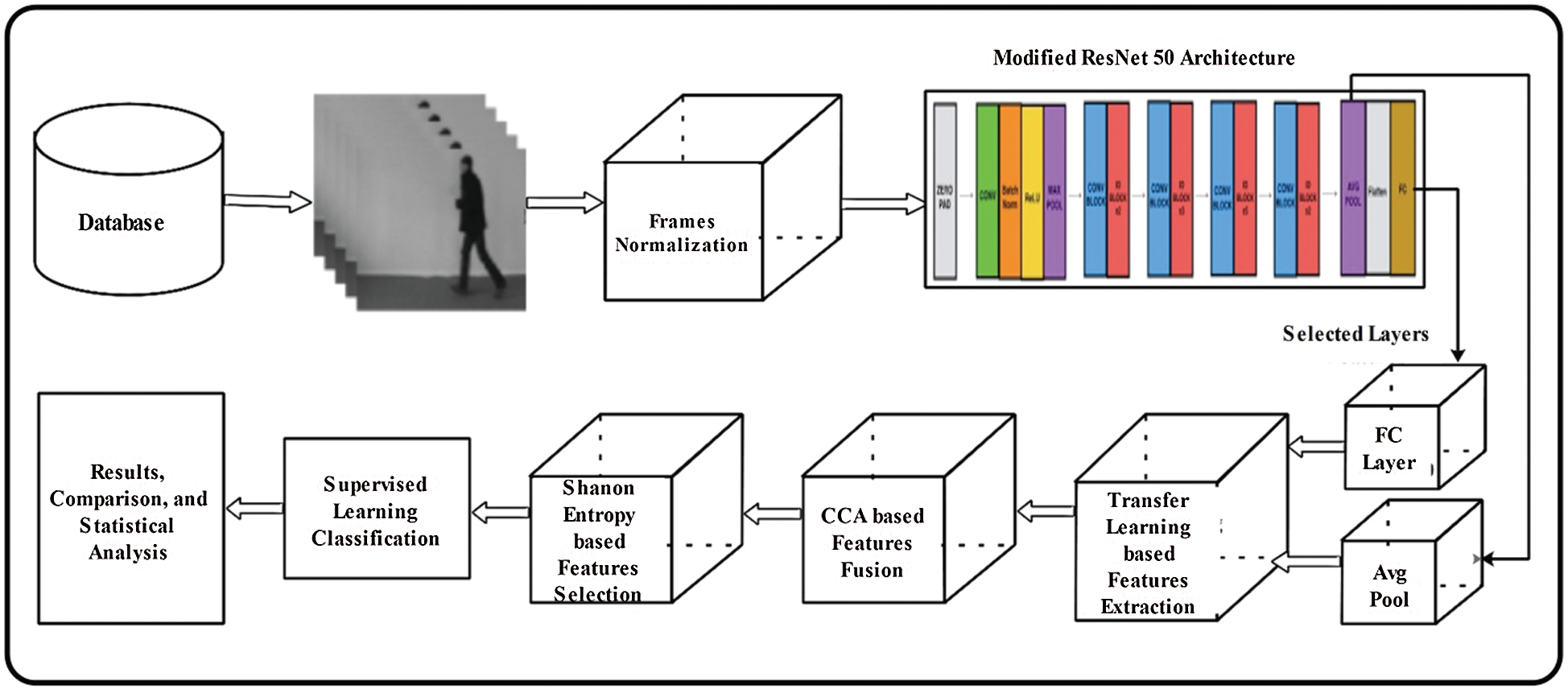
Figure 1: Proposed deep learning-based architecture for human action recognition
The main objective of preprocessing is to bring improvement in image statistics. It represses unwanted distortions or improves some image features that are essential for additional {processing}. In this work, we performed normalization of video frames. Normalization is a procedure frequently applied as a major aspect of data preparation for machine learning. The normalization process is comprised of global contrast normalization(GCN), local normalization, and histogram equalization [27].
GCN: In Global Contrast Normalization (GCN), each value of an image's pixels is subtracted from the mean value and then divided with predictable error. To avert images from possessing differing quantities of contrast is the main objective of GCN. Images having very little, however, not equal to zero contrast have smaller details and turn out to be problematic for action recognition. GCN can be described as:
where
2.2 Convolutional Neural Network
A simple CNN model consists of the following layers: Convolution Layer, Pooling Layer, ReLu Layer, Batch Normalization Layer, Fully Connected Layer, and output layer. The details of each layer defined as follows:
The Convolutional layer received a volume of size
It represents
The next layer is a ReLU activation layer. It is a kind of activation function. Mathematically, it is described as
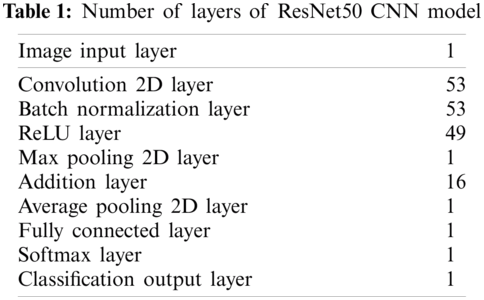
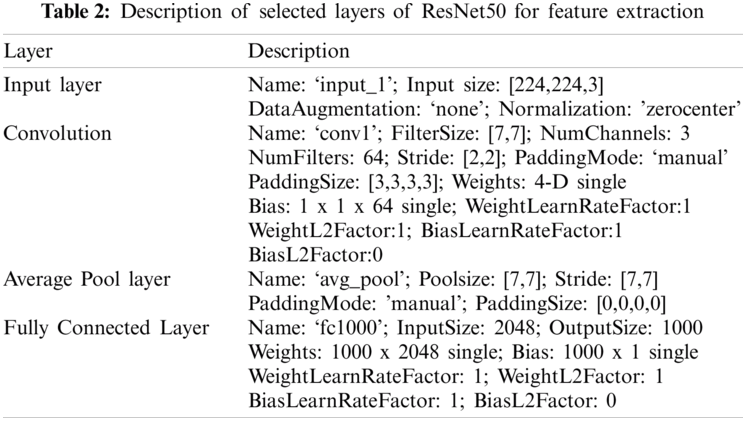
Deep learning showed great success in machine learning in the last few years for several video surveillance and medical imaging applications. Video surveillance is a hot research area, but the researchers face major issues called imbalanced datasets and large datasets. In this article, we used a pre-trained deep learning model named ResNet-50. The common ResNet models usually perform the skipping of double or triple layers, which comprise (ReLu) and batch normalization [28]. The incentive for skipping over layers is to attach the output by the previous layer to the next coming layer. This will support reducing the vanishing gradient issue. Skipping helps simplify the network because it uses small no layers in the initial training stages. As a result, it accelerates the process of learning. As long as the network will learn the space of features, it slowly reinstates those skipped layers. A neural network in the absence of residual portion investigates additional space of feature that makes it unprotected. ResNet-50 is a convolutional neural network (CNN), originally trained on the ImageNet dataset, consisting of around 100 million images of 1000 classes. The depth of this network is 50 layers, and the input size is 224-by-224-by-3. The original number of layers and selected layers are presented in Tabs. 1 and 2.
We modified this ResNet50 architecture according to the number of classes. For this purpose, we removed the last layer and added a new layer that includes the number of action classes. We then train the modified model through transfer learning on 70% data, where the next 30% are used for the testing process. In the training process, we define the number of epochs 100, the learning rate is 0.0001, and mini-batch size is 64. The input size is the same as the input of the original deep model. We extract features from the last two feature layers named Average Pool Layer and Fully Connected Layer. The dimension of extracted features is
In multivariate statistical analysis, CCA has similar significance as principal component analysis (PCA) and linear discriminant analysis (LDA). It is the most important multi-data processing technique. CCA is conventionally utilized for analyzing the associations amongst two groups of variables [29]. It tries to find two groups of random variables so that these random variables presume the highest correlation over two groups of data. In contrast, the transformations inside every group of data are not correlated. Mathematically, it is formulated as follows:
Two groups of data
To acquire the initial couple of canonical variables stated as:
The leftover
The issue of CCA may be presented as an optimization problem that uses “Lagrange multipliers,” and the canonical covariates can be computed by resolving a general eigenvalue explanation [29]. Here the columns of
where,
Feature selection is the process of selecting the best features for accurate classification within less execution time. In this work, a new threshold function is proposed to select best features based on the Shannon Entropy. Initially, we computed the entropy value of the fused vector by the following equation.
where,
The final selected features are passed in the supervised learning classifiers for final classification.
3 Experimental Results and Discussion
The proposed method is evaluated on four selected datasets as IXMAS, UCF Sports, UT Interaction, and KTH. Each classifier’s performance is measured through the following parameters such as recall rate, precision rate, accuracy, FNR, and testing time. Also, the performance of Fine KNN is further compared with few other well-known classifiers such as Linear Discriminant (LDA), Quadratic SVM (QSVM), Cubic SVM (CSVM), Medium Gaussian SVM (MGSVM), and Weighted KNN (WKNN). The results of each classifier are presented below.
The proposed recognition accuracy of the IXMAS dataset is presented in Tab. 3. Six different classifiers are utilized for recognition accuracy and selected the best one based on the accuracy performance. From this table, the highest accuracy is 89.6% achieved on Fine KNN, whereas the other parameter such as recall rate is 89.58%, the precision rate is 89.75%, FNR is 10.42%, and the classification computation time is 277.97 s. The next highest accuracy is 87.8% which is attained at Cubic SVM. The minimum accuracy of 79.8% is achieved on Weighted KNN along best recognition time of 194.89 s. The best accuracy of FKNN is proved by the confusion matrix given in Tab. 4. Besides, the computation time of each classifier is plotted in Fig. 2. As shown in this figure, the WKNN executes fast as compare to other classifiers.
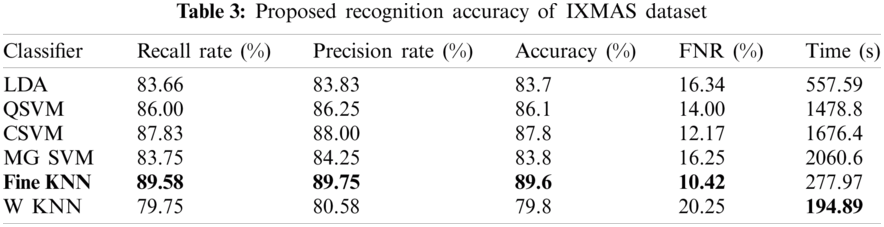
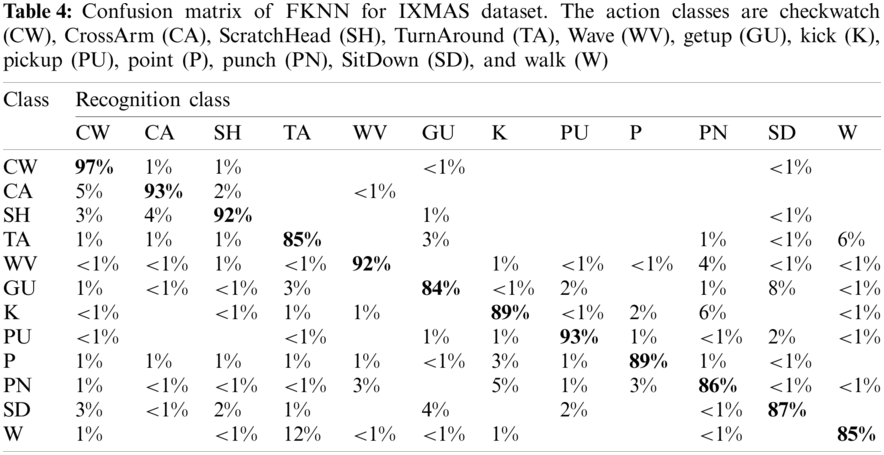
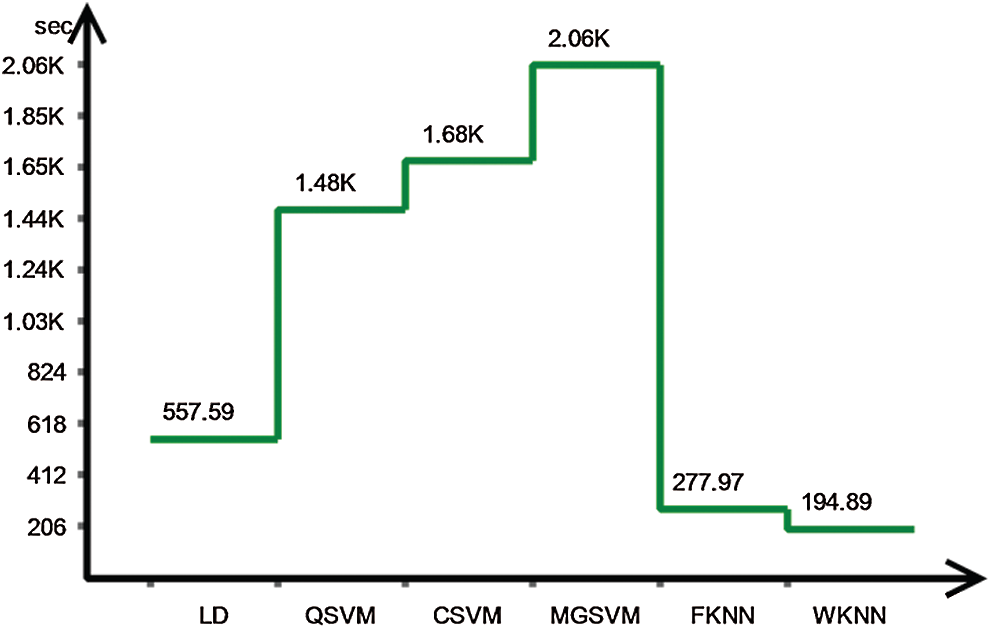
Figure 2: Testing Computational time for IXMAS dataset
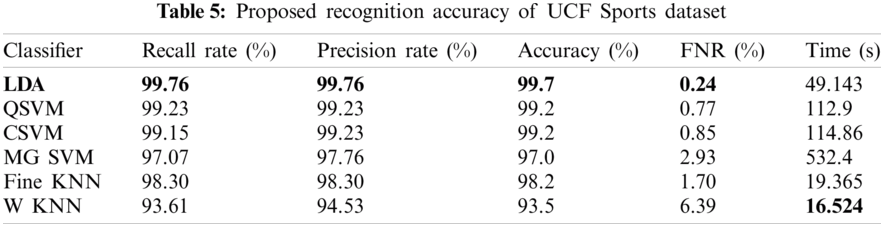
The proposed recognition accuracy of the UCF Sports dataset is presented in Tab. 5. Six different classifiers are used for recognition accuracy and selected the best one based on the accuracy performance. From this table, the highest accuracy is 99.7% achieved on Linear Discriminant. In contrast, the other parameter such as recall rate is 99.76%, the precision rate is 99.76%, FNR is 0.24, and the classification computation time is 49.143 s. The next highest accuracy is 99.2% achieved on Quadratic SVM and cubic SVM. The minimum accuracy of 93.5% is achieved on Weighted KNN along best recognition time of 16.524 s. The best accuracy of LDA is further proved by a confusion matrix, presented in Tab. 6. Besides, the computation time of each classifier is plotted in Fig. 3. From this figure, it is illustrated that the WKNN executes fast as compare to other classifiers.
The proposed recognition accuracy of the UT Interaction dataset is presented in Tab. 7. Six different classifiers are used for recognition accuracy and selected the best one based on the accuracy performance. From this table, the highest accuracy is 96.7% achieved on Fine KNN, whereas the other parameters such as recall rate are 97%, the precision rate is 96.66%, and FNR is 3%. The next highest accuracy is 96.5% that is attained on the LDA classifier. The minimum noted the accuracy of 91.2% achieved on Weighted KNN along best recognition time of 14.604 s. The best accuracy of FKNN is proved by the confusion matrix given in Tab. 8. Also, the computation time of each classifier is plotted in Fig. 4. As shown in this figure, the WKNN computationally fast as compared to the rest of the classifiers.
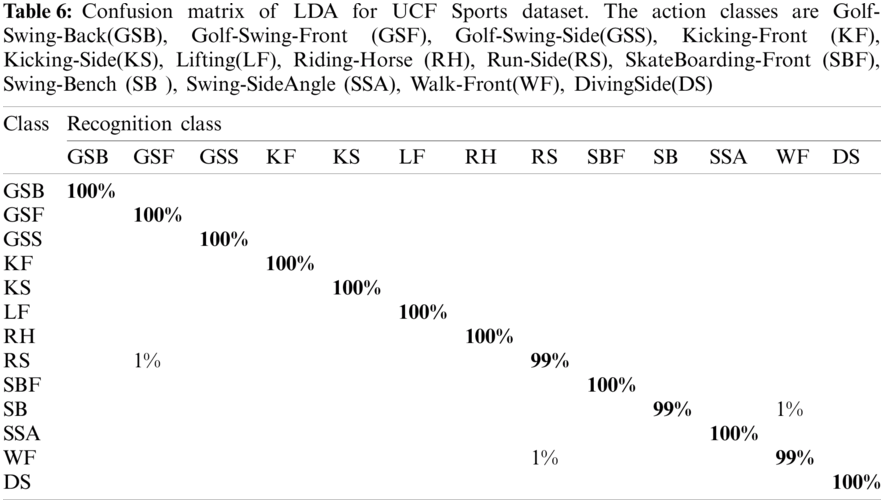
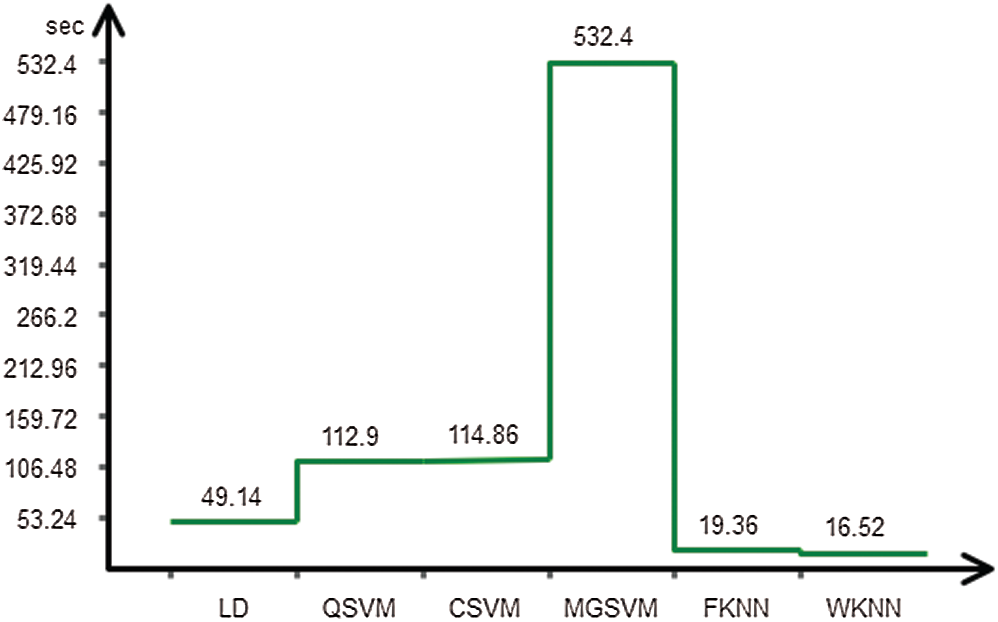
Figure 3: Testing computational time for UCF sports dataset
The proposed recognition accuracy of the KTH dataset is shown in Tab. 9. Six different classifiers are used for recognition accuracy and selected the best one based on the accuracy performance. From this table, the highest accuracy is 96.6% achieved on FKNN. In contrast, the other parameter such as recall rate is 96.5%, the precision rate is 96.5%, FNR is 3.5%, and the classification computation time is 497.09 s. The next highest accuracy is 96.0% that is attained on Quadratic SVM. The minimum achieved accuracy is 91.7% for the weighted KNN classifier. The accuracy of Fine KNN is further proved by a confusion matrix, given in Tab. 10. Also, the computation time of each classifier is plotted in Fig. 5. From this figure, it is noted that the WKNN classifier executes fast as compared to the rest of the listed classifiers.
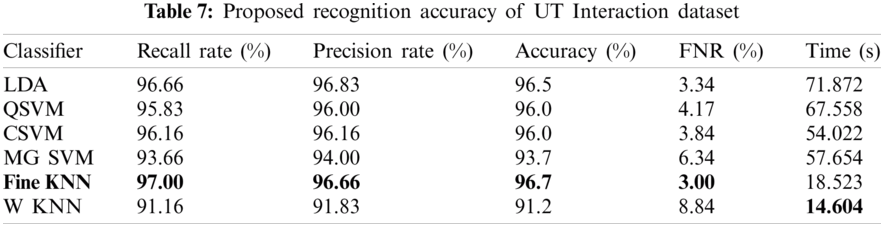
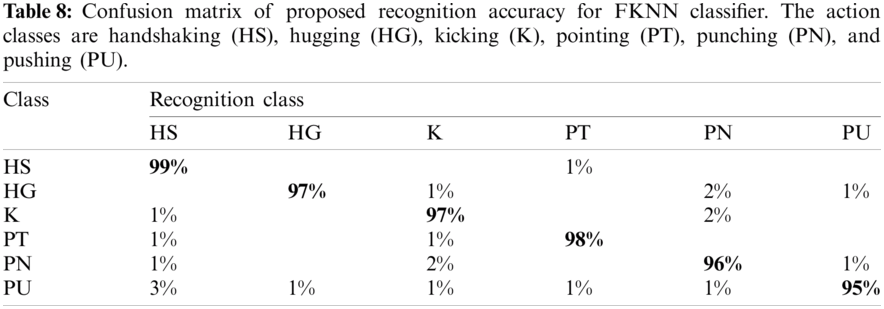
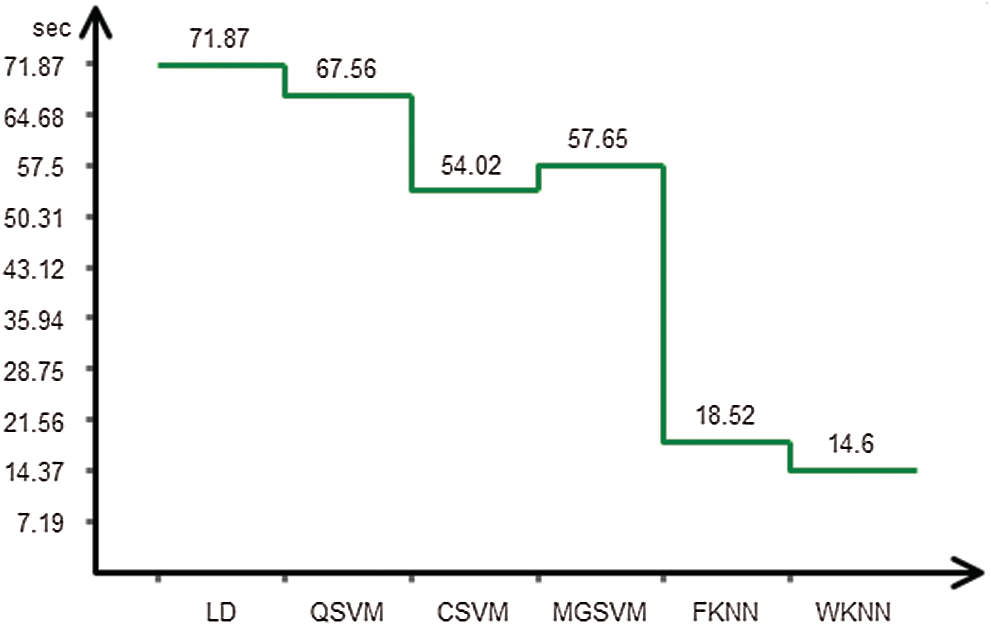
Figure 4: Recognition computational time for UT interaction dataset
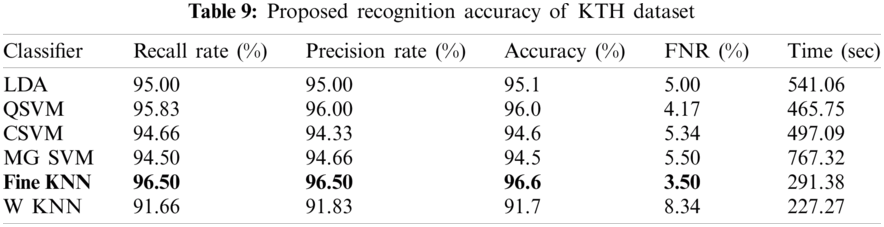
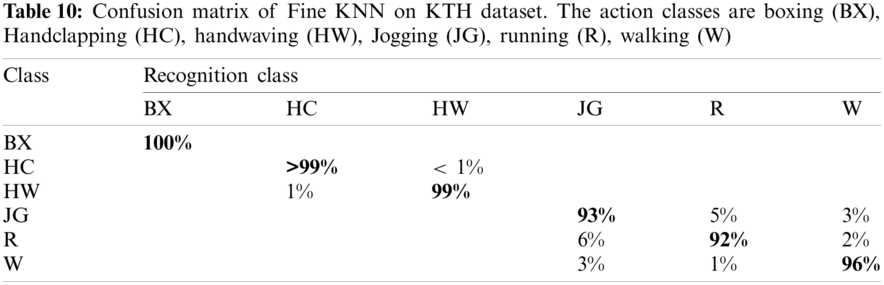
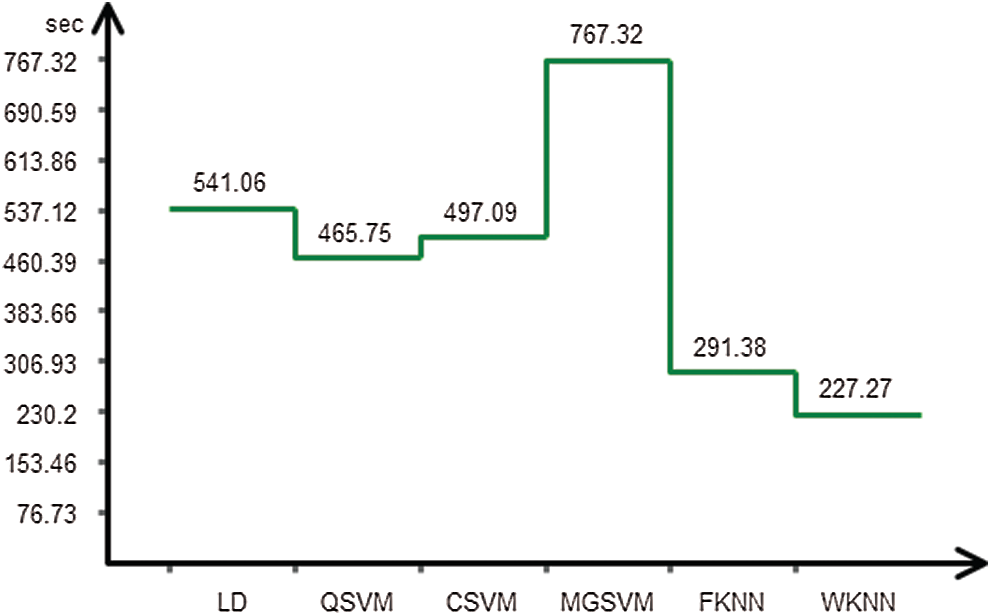
Figure 5: Recognition computational time for KTH dataset
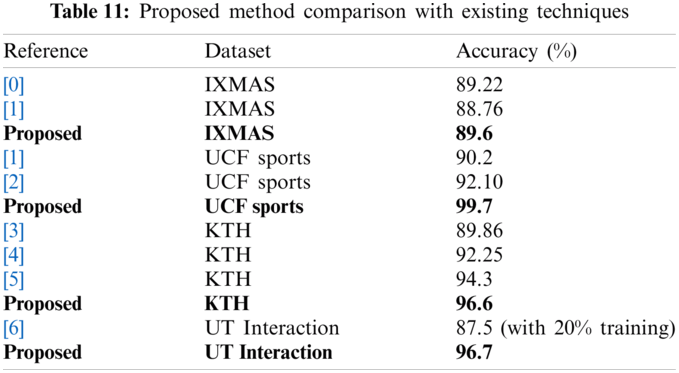
Finally, we discussed our proposed method performance in the form of numeric values and graph plots. The numerical results are given in Tabs. 3–10. The results presented in these tables are validated through different performance matrices such as Recall rate, Precision rate, Accuracy, FNR, and Time. Based on the results, the Fine KNN showed better performance. However, the computational time of Weighted KNN is better. The computational time of each dataset is plotted in Figs. 2–5. But based on the accuracy, the Fine KNN is much better. Finally, we compare the proposed method accuracy with some recent techniques, as presented in Tab. 11. From this table, it is showed that the proposed accuracy is much better as compared to the existing techniques.
A new method for the recognition of human actions is presented in this deep learning research work. There are few important steps to the proposed method. In the first step, pre-processing is applied, and video frames are resized according to the target model's input. The pre-trained ResNet50 model is used in the next step and is trained using transfer learning. Employing TL, features are extracted from two successive layers and fused using canonical correlation analysis (CCA). The fused feature vector consists of irrelevant information that is selected using the Shanon Entropy approach. Finally, the selected features are classified using supervised learning classifiers, and the best of them are selected based on the accuracy value. A few well-known datasets are used to evaluate the proposed method and have achieved remarkable accuracy. Based on the accuracy, we conclude that the features extracted through deep learning give better results when handling large-scale datasets. It is also noted that the merging of multilayer features produces better results. But this step affects the efficiency of the system. As a result, the selection process provided more accuracy and also minimizes overall time. In future studies, more complex datasets such as HMDB51 and UCF101 will be considered to evaluate the proposed method.
Funding Statement: This research was supported by Korea Institute for Advancement of Technology (KIAT) grant funded by the Korea Government (MOTIE) (P0012724, The Competency Development Program for Industry Specialist) and the Soonchunhyang University Research Fund.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. N. Jaouedi, N. Boujnah and M. S. Bouhlel, “A new hybrid deep learning model for human action recognition,” Journal of King Saud University-Computer and Information Sciences, vol. 32, no. 3, pp. 447–453, 2020. [Google Scholar]
2. M. A. Khan, T. Akram, M. Sharif, M. Y. Javed, N. Muhammad et al., “An implementation of optimized framework for action classification using multilayers neural network on selected fused features,” Pattern Analysis and Applications, vol. 21, no. 4, pp. 1–21, 2018. [Google Scholar]
3. A. Sharif, K. Javed, H. Gulfam, T. Iqbal, T. Saba et al., “Intelligent human action recognition: A framework of optimal features selection based on euclidean distance and strong correlation,” Journal of Control Engineering and Applied Informatics, vol. 21, no. 32, pp. 3–11, 2019. [Google Scholar]
4. M. A. Khan, I. Haider, M. Nazir, A. Armghan, H. M. J. Lodhi et al., “Traditional features based automated system for human activities recognition,” in 2020 2nd Int. Conf. on Computer and Information Sciences, Sakaka, SA, pp. 1–6, 2020. [Google Scholar]
5. H. Arshad, M. I. Sharif, M. Yasmin, J. M. R. Tavares, Y. D. Zhang et al., “A multilevel paradigm for deep convolutional neural network features selection with an application to human gait recognition,” Expert Systems, vol. 5, pp. e12541, 2020. [Google Scholar]
6. Y.-D. Zhang, S. A. Khan, M. Attique, A. Rehman and S. Seo, “A resource conscious human action recognition framework using 26-layered deep convolutional neural network,” Multimedia Tools and Applications, vol. 21, no. 4, pp. 1–23, 2020. [Google Scholar]
7. M. A. Khan, K. Javed, S. A. Khan, T. Saba, U. Habib et al., “Human action recognition using fusion of multiview and deep features: an application to video surveillance,” Multimedia Tools and Applications, vol. 7, pp. 1–27, 2020. [Google Scholar]
8. M. Sharif, F. Zahid, J. H. Shah and T. Akram, “Human action recognition: A framework of statistical weighted segmentation and rank correlation-based selection,” Pattern Analysis and Applications, vol. 23, no. 1, pp. 281–294, 2020. [Google Scholar]
9. T. Akram, M. Sharif, N. Muhammad, M. Y. Javed and S. R. Naqvi, “Improved strategy for human action recognition; Experiencing a cascaded design,” IET Image Processing, vol. 14, pp. 818–829, 2019. [Google Scholar]
10. S. Ji, W. Xu, M. Yang and K. Yu, “3D convolutional neural networks for human action recognition,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 35, no. 1, pp. 221–231, 2012. [Google Scholar]
11. C. Chen, R. Jafari and N. Kehtarnavaz, “A survey of depth and inertial sensor fusion for human action recognition,” Multimedia Tools and Applications, vol. 76, no. 3, pp. 4405–4425, 2017. [Google Scholar]
12. K. Akila and S. Chitrakala, “Highly refined human action recognition model to handle intraclass variability & interclass similarity,” Multimedia Tools and Applications, vol. 78, no. 15, pp. 20877–20894, 2019. [Google Scholar]
13. I. Laptev, “On space-time interest points,” International Journal of Computer Vision, vol. 64, no. 2–3, pp. 107–123, 2005. [Google Scholar]
14. A. F. Bobick and J. W. Davis, “The recognition of human movement using temporal templates,” IEEE Transactions on Pattern Analysis & Machine Intelligence, vol. 23, no. 3, pp. 257–267, 2001. [Google Scholar]
15. A. Klaser, M. Marszałek and C. Schmid, “A spatio-temporal descriptor based on 3d-gradients,” in BMVC 2008-19th British Machine Vision Conf., NY, USA, pp. 1–10, 2008. [Google Scholar]
16. G. Willems, T. Tuytelaars and L. Van Gool, “An efficient dense and scale-invariant spatio-temporal interest point detector,” in European Conf. on Computer Vision, Berlin, Heidelberg, pp. 650–663, 2008. [Google Scholar]
17. P. Scovanner, S. Ali and M. Shah, “A 3-dimensional sift descriptor and its application to action recognition,” in Proc. of the 15th ACM International Conference on Multimedia, NY, USA, pp. 357–360, 2007. [Google Scholar]
18. H. Wang, A. Kläser, C. Schmid and C.-L. Liu, “Dense trajectories and motion boundary descriptors for action recognition,” International Journal of Computer Vision, vol. 103, no. 1, pp. 60–79, 2013. [Google Scholar]
19. M. A. Khan, T. Akram, M. Sharif, M. Y. Javed, N. Muhammad et al., “An implementation of optimized framework for action classification using multilayers neural network on selected fused features,” Pattern Analysis and Applications, vol. 22, no. 4, pp. 1377–1397, 2019. [Google Scholar]
20. A. Ullah, K. Muhammad, I. U. Haq and S. W. Baik, “Action recognition using optimized deep autoencoder and CNN for surveillance data streams of non-stationary environments,” Future Generation Computer Systems, vol. 96, no. 2, pp. 386–397, 2019. [Google Scholar]
21. M. Rashid, M. Alhaisoni, S.-H. Wang, S. R. Naqvi, A. Rehman et al., “A sustainable deep learning framework for object recognition using multilayers deep features fusion and selection,” Sustainability, vol. 12, pp. 5037, 2020. [Google Scholar]
22. L. Wang, P. Koniusz and D. Q. Huynh, “Hallucinating bag-of-words and fisher vector IDT terms for CNN-based action recognition,” arXiv preprint arXiv: 1906.05910, 2019. [Google Scholar]
23. M. Ma, N. Marturi, Y. Li, A. Leonardis and R. Stolkin, “Region-sequence based six-stream CNN features for general and fine-grained human action recognition in videos,” Pattern Recognition, vol. 76, no. 26, pp. 506–521, 2018. [Google Scholar]
24. F. Afza, M. Sharif, S. Kadry, G. Manogaran, T. Saba et al., “A framework of human action recognition using length control features fusion and weighted entropy-variances based feature selection,” Image and Vision Computing, vol. 106, no. 27, pp. 104090, 2021. [Google Scholar]
25. Q. Xiong, J. Zhang, P. Wang, D. Liu and R. X. Gao, “Transferable two-stream convolutional neural network for human action recognition,” Journal of Manufacturing Systems, vol. 56, no. 1, pp. 605–614, 2020. [Google Scholar]
26. O. Elharrouss, N. Almaadeed, S. Al-Maadeed, A. Bouridane and A. Beghdadi, “A combined multiple action recognition and summarization for surveillance video sequences,” Applied Intelligence, vol. 51, no. 2, pp. 690–712, 2021. [Google Scholar]
27. D. A. Pitaloka, A. Wulandari, T. Basaruddin and D. Y. Liliana, “Enhancing CNN with preprocessing stage in automatic emotion recognition,” Procedia Computer Science, vol. 116, pp. 523–529, 2017. [Google Scholar]
28. K. He, X. Zhang, S. Ren and J. Sun, “Deep residual learning for image recognition,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, Las Vegas, Nevada, pp. 770–778, 2016. [Google Scholar]
29. N. M. Correa, T. Adali, Y.-O. Li and V. D. Calhoun, “Canonical correlation analysis for data fusion and group inferences,” IEEE Signal Processing Magazine, vol. 27, no. 4, pp. 39–50, 2010. [Google Scholar]
30. C. Wang, G. Hu and Y. Liu, “Multi-views action recognition on deep learning and K-SVD,” Journal of Physics, vol. 20, pp. 62015, 2019. [Google Scholar]
31. K. Kiruba, E. D. Shiloah and R. R. C. Sunil, “Hexagonal volume local binary pattern (H-VLBP) with deep stacked autoencoder for human action recognition,” Cognitive Systems Research, vol. 58, no. 2, pp. 71–93, 2019. [Google Scholar]
32. Y. Yi, P. Hu and X. Deng, “Human action recognition with salient trajectories and multiple kernel learning,” Multimedia Tools and Applications, vol. 77, no. 22, pp. 17709–17730, 2018. [Google Scholar]
33. K. Charalampous and A. Gasteratos, “On-line deep learning method for action recognition,” Pattern Analysis and Applications, vol. 19, no. 2, pp. 337–354, 2016. [Google Scholar]
34. Z. Guo, B. Wang and Z. Xie, “A novel 3D gradient LBP descriptor for action recognition,” Transaction on Information and Systems, vol. 100, pp. 1388–1392, 2017. [Google Scholar]
35. A.-A. Liu, Y.-T. Su, W.-Z. Nie and M. Kankanhalli, “Hierarchical clustering multi-task learning for joint human action grouping and recognition,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 1, pp. 102–114, 2016. [Google Scholar]
36. S. P. Sahoo and S. Ari, “On an algorithm for human action recognition,” Expert Systems with Applications, vol. 115, no. 26, pp. 524–534, 2019. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |