DOI:10.32604/cmc.2021.017658
| Computers, Materials & Continua DOI:10.32604/cmc.2021.017658 | |
| Article |
An Intelligent Forwarding Strategy in SDN-Enabled Named-Data IoV
1Department of Computer Science, The Superior University, Lahore, 54000, Pakistan
2National University of Computer and Emerging Sciences, Chiniot-Faisalabad Campus, 35400, Pakistan
3Department of Software and Communications Engineering, Hongik University, Sejong City, 30016, Korea
*Corresponding Author: Byung-Seo Kim. Email: jsnbs@hongik.ac.kr
Received: 06 February 2021; Accepted: 24 April 2021
Abstract: Internet of Vehicles (IoV), a rapidly growing technology for efficient vehicular communication and it is shifting the trend of traditional Vehicular Ad Hoc Networking (VANET) towards itself. The centralized management of IoV endorses its uniqueness and suitability for the Intelligent Transportation System (ITS) safety applications. Named Data Networking (NDN) is an emerging internet paradigm that fulfills most of the expectations of IoV. Limitations of the current IP internet architecture are the main motivation behind NDN. Software-Defined Networking (SDN) is another emerging networking paradigm of technology that is highly capable of efficient management of overall networks and transforming complex networking architectures into simple and manageable ones. The combination of the SDN controller, NDN, and IoV can be revolutionary in the overall performance of the network. Broadcast storm, due to the broadcasting nature of NDN, is a critical issue in NDN based on IoV. High speed and rapidly changing topology of vehicles in IoV creates disconnected link problem and add unnecessary transmission delay. In order to cop-up with the above-discussed problems, we proposed an efficient SDN-enabled forwarding mechanism in NDN-based IoV, which supports the mobility of the vehicle and explores the cellular network for the low latency control messages. In IoV environment, the concept of Edge Controller (EC) to maintain and manage the in-time and real-time vehicular topology is being introduced. A mathematical estimation model is also proposed in our work that assists the centralized EC and SDN to find not only the shortest and best path but also the most reliable and durable path. The naming scheme and in-network caching property of the NDN nodes reduce the delay. We used ndnSIM and NS-3 for the simulation experiment along with SUMO for the environment generation. The results of NDSDoV illustrate significant performance in terms of availability with limited routing overhead, minimized delay, retransmissions, and increased packet satisfaction ratio. Besides, we explored the properties of EC that contribute mainly in path failure minimization in the network.
Keywords: Software-defined networking; named-data networking; internet of vehicles; routing
We have seen modernization at an extensive level in smart devices that we used to access network applications and services, with the increased numbers and types of new technologies over the past two decades. However, with the passage of time, the requirement for devices using the network and people is now stretching its limits. Software defined networking (SDN) and network function virtualization (NFV) provide new and unique ways to manage and design the network, while exploring the centralized control plane and programmable behavior of SDN offers a platform to implement and test the new innovative ideas. To provide a centralized view of the distributed network, the SDN separates the data plane from the control plane. Named data networking (NDN) is an emerging name-based content-oriented internet architecture built on the limitations of current internet protocol (IP) architecture. The IP address layer in the IP architecture was replaced with the content names. A comparison of the NDN and IP hourglass models is shown in Fig. 1.
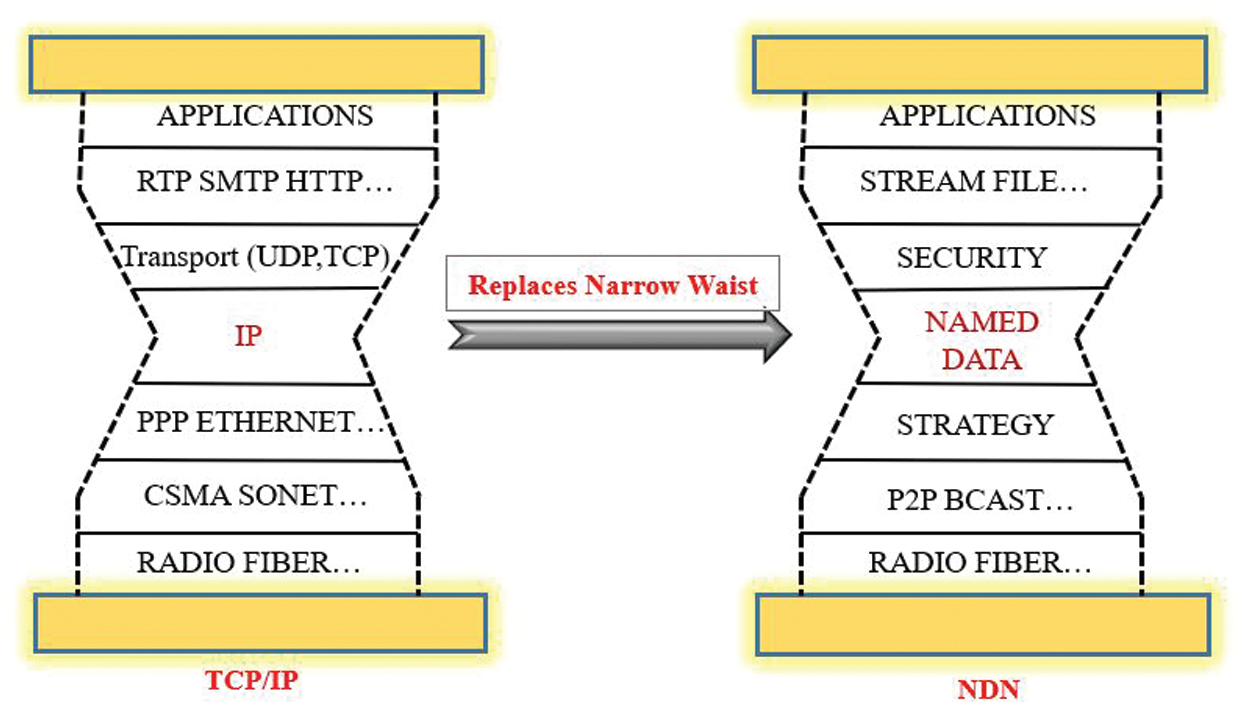
Figure 1: Comparison of NDN and IP hourglass models
Technological advancements in the fields of computing, sensing, communication, automation, and networking technologies for vehicles are rerouting the trend toward internet of vehicles (IoV) instead of traditional vehicular ad-hoc networks (VANETs) [1]. IoV is another rapidly growing technology for an efficient vehicular communication system. Government agencies, researchers, and industries have made great endeavors that would contribute considerably to the deployment and development of the ITS. A prominent instantiation of the Internet of Things (IoTs) is represented by IoV in the ITS. IoV includes some exclusive characteristics if we compare it with Mobile Ad Hoc Network (MANET), such as predictable mobility, high-speed internet connectivity, high computation ability, and variable density of the network. MANET has some limitations, such as random motion, random computation, and limited battery power. IoV is more suitable for ITS safety applications and is different from VANET because of its centralized management. In VANET, the scenario is different, in which only vehicles can act as access points to provide connectivity to other vehicles. There will be an estimated 20.8 million vehicles by 2030 only in the USA [2]. It would be a hard task for VANET to provide support for traffic management and safety applications on a large scale. IoV may be regarded as the evolution of VANET and MANET, and it is more challenging to implement despite having more powerful attributes. Designing efficient data transmission and routing protocols is a challenging task in IoV because of various issues with node density, heterogeneous communication technologies, varying mobility, and intermittent connectivity. It is more challenging for current vehicular network architecture to fulfill the basic requirements of advanced and intelligent transportation systems, along with scalability and flexibility.
To achieve an optimized and efficient routing methodology, SDN is an emerging technology that modernizes the IoV architecture. A lot of research papers have already discussed the architecture of SDN-enabled IoV. Increased traffic and number of vehicles, along with exceeding ratios of accidents, make the management of distributed traffic in big cities a hard task. SDN offers a logically centralized environment for IoV through heterogeneous networks [3]. In data centers and access networks, SDN is currently only considered for fixed networks that can boost traffic communication in smart cities along with IoV. The implementation of SDN in vehicular networks is one of the most emphasized research issues. Architectural level and high theoretical preparatory research efforts and proposals have been made to present the potential of SDN for efficient resource utilization in VANET [4]. There is a lack of practical implantation of SDN with IoV to assess the benefits of both for each other. There is very limited research in the area of high-level connectivity due to rapidly changing and dynamic topologies. Our proposed strategy paved the path toward the realization of centralized traffic management for the implementation of SDN with IoV. We suppose that bridging the gap between IoV and road safety applications using the benefits of SDN over IoV offers potential benefits. SDN has many advantages regarding rapid link failure recovery [5], quality-of-service (QoS) improvement [6,7], and QoS provisioning [8] for the next-generation networks. A lot of work has been done on SDN-enabled vehicular networks, but there are some limitations in the aforementioned research related to broadcast storms, communication delays, and mobility of high-density nodes.
The proposed protocol in our work uses a road aware strategy that takes care of the road segments created by the gateway nodes (nodes near intersections and road side units (RSUs)) and is very suitable for the IoV. Our approach to using the segment ID instead of the vehicle ID for path selection makes it more reliable and durable. Different technologies are utilized in forwarding the data packets, as the very packets from the vehicles on the road and SDN will be forwarded and received through the cellular network. The use of RSUs forwards the data packet to mobile as well as fixed destinations. As we know, the control message requires low bandwidth and low latency; therefore, we used a cellular network for this. The characteristics of the long-range coverage of cellular networks can benefit the transmission of emergency packets with few hops [9]. The services of RSUs are limited to video streaming, gaming, and entertainment, etc. Hence, RSUs can be used in normal data forwarding. The Edge controller (EC) in our proposed scheme will explore real-time data after every 100 ms. This approach reduces network overhead and overall response time. A path estimation model is used, along with an intelligent forwarding strategy, to find the shortest but durable communication path. EC in the proposed work plays a significant role in real-time information gathering from the vehicles. Collection of seamless information about the vehicles is very important without any delay. Vehicle information includes vehicle ID, position, road (segment) ID, speed, and content information, as they are very important for the SDN to process the estimation model for the path selection. In various instances, vehicle-generated data overload the network with redundant and unnecessary information. In this case, there is no need to update the SDN controller after every 0.1 s. EC will be responsible for filtering the redundant data and sending the valuable information only to the SDN controller. Each EC will manage a specific area that consists of multiple base stations.
The remainder of the paper is organized as follow. We present the background and motivation in Section 2. Section 3 presents the main proposed scheme. Section 4 presents the simulation environment and graphs, along with the conclusion in Section 5.
In this section, we discuss the background of our proposed work, along with the motivation behind our research work and the problem statement that drove us to contribute here.
2.1 Named Data Networking (NDN)
NDN is an emerging internet paradigm that shifts from the communication model of IP and focuses on “what” the content is rather than “where” the content is stored. Application-level names of the content are directly used for content retrieval. Names in the NDN model are user-friendly and hierarchically structured with a variable number of components such as URLs [10]. Content names can define the scope of the data very well. Interest packet is sent by the node to inquire the named data packet, replied by any of the nodes either caching or owning the requested content. NDN is very suitable for IoV in terms of content retrieval having above mentioned features. The vehicles on roads are only interested in content requested by them regardless of the node identity having that particular data (e.g., road congestion information, weather conditions, electrical vehicle charging fee). Most of the data content is with either temporal or spatial scopes on the roadsides. In NDN, caching is performed transparently at every node that supports the intermittent connectivity of vehicles and benefits fast content retrieval by caching it in several nodes.
Two types of packets are used in connectionless and receiver-driven communication in NDN—interest packet and data packet. The pervasive in-network caching of the NDN is suitable for vehicular information [11]. A consumer node starts the content retrieval process by sending a request message after broadcasting the interest packet containing hierarchical content names to request the data packet. The naming scheme is shown in Fig. 2. The naming scheme will initially identify applications, followed by the road segments, direction, speed, timestamp, and eventually the nonce generated by the publisher.
At each node, three data structures are involved in the interest and data packet processing. Content store (CS) stores the names of the contents and incoming data, pending information table (PIT) stores the entries of un-entertained requests, and it will keep the record of the incoming face of the forwarded requests. Forwarding information base (FIB) is used to set up a routing table to select the outgoing interface if any potential forwarder exists. The term interface is used to indicate the incoming and outgoing interfaces in NDN [12].
On the interest packet reception, a node will check its CS for data matching first. In case it finds the matching entry in CS, then it will forward the cached data back to the consumer; otherwise, it will check the PIT for whether the same request is forwarded or not. If it finds the matching entry, it will discard the interest packet; otherwise, PIT will update after FIB lookup and returns to the outgoing interface. Then the interest packet will forward toward the destination using the potential forwarder. Data packets are not routed; instead, they simply follow the breadcrumbs of interest packets. To serve future requests, each intermediate node may cache data packets. An NDN forwarding model is shown in Fig. 2.
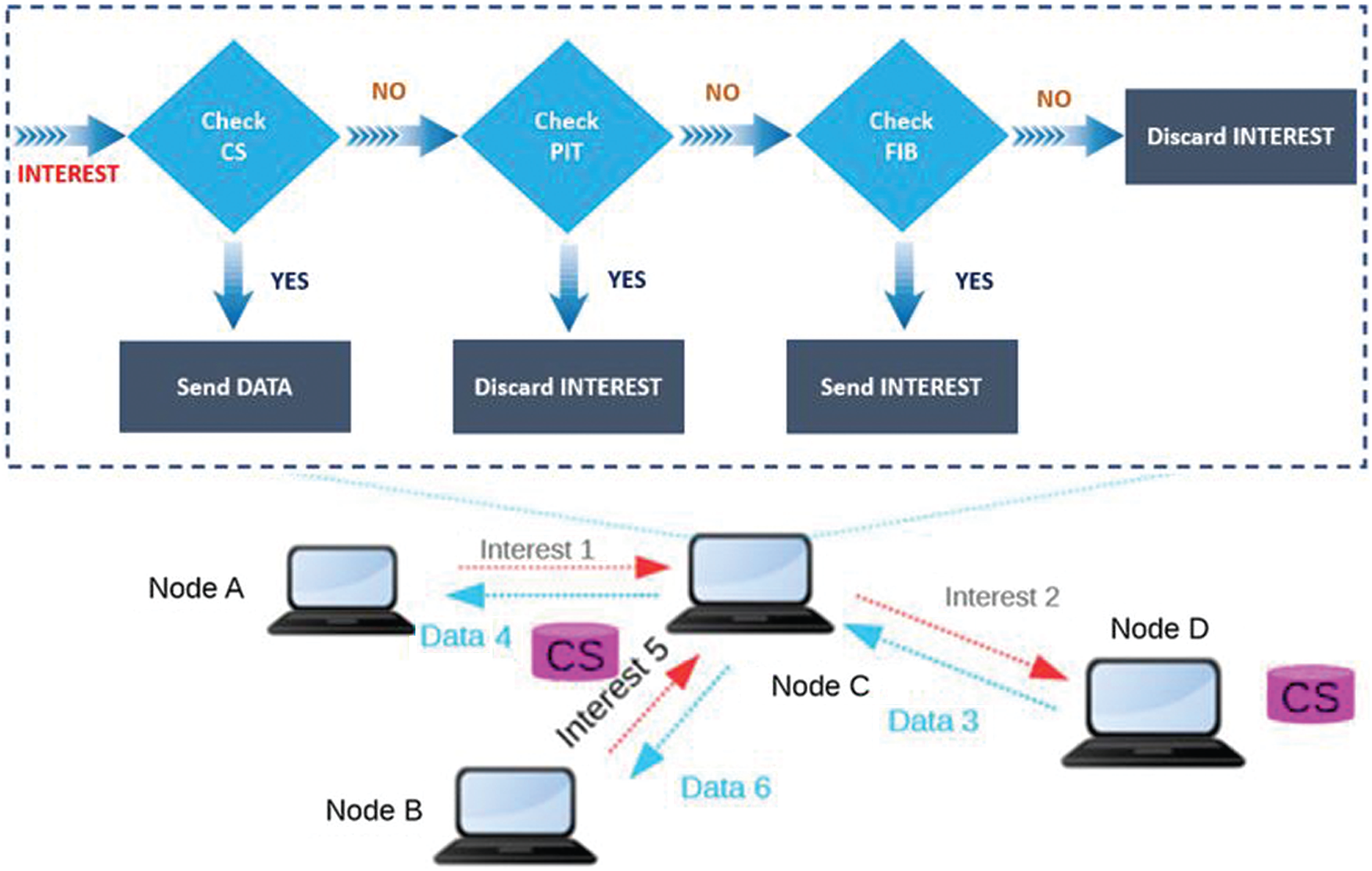
Figure 2: NDN forwarding mode
2.2 Problem Statement and Related Work
Mobility refers to the relative maximum speed at which one can achieve reliability. Mobility, migration state, and handover of vehicles are studied in different research works. The handover mechanism is very challenging in an SDN-based IoV environment compared with the traditional cellular network. There is a need for the renegotiation of radio resources with a new SDN controller. Random changing topology needs to update the flow table in the SDN controller. As the use of an EC controller encourages service redirection and live migration that increases the handover complexity, the generation of handover will be simultaneous for the multi-hop links and the edge controller services. In near future, the position of vehicles can be estimated using the trajectory prediction component by using the direction, velocity, position, and destination of the vehicle. It will help with updating the flow table in SDN and service migration. Handover mechanism failure is another issue in which the recovery of failure and error handling should be considered carefully, and there should be minimum propagation delay of the warning message.
Vehicular networks are unpredictable with high mobile environments and random changing topologies [13]. It is an important and key requirement for NDN-based IoVs to have mobility support. In NDN, there is a mechanism to re-issue the packets, but it adds in-network overhead, and the broadcast nature of NDN can cause broadcast storm issue as well. The broadcast storm is considered a critical problem in NDN scenarios that results in the wastage of network resources and extra transmission delay. Disconnected link issue in the network caused by the disconnection of consumer node, producer node, or intermediate (relay) node from the network results in transmission failure and unnecessary delay. In the IoV-NDN environment, in-time information management is of vital importance along with the updating of the global tables efficiently. SDN can be an excellent candidate for solving all these problems in NDN-based IoV environments [14]. Broadcast storm mitigation strategy (BSMS) in [15] is a forwarding mechanism in V-NDN that mitigates the broadcast storm issue. Data packets do not follow the same path as the interest packets due to the disconnected link and vehicle unavailability resulted by varying and high-speed vehicles on the roads. In BSMS, a timer is calculated at the receiver’s end that calculates the distance between the sender and receiver node. The farthest node will be selected as a potential forwarder. A forwarder timer counter is used to retransmit and rebroadcast the same request.
In [16], efficient mobility support work has been done, that is, NDN-ICN-based IoV, by using the location-aware strategy along with the computation and storage abilities of fog computing. The mobility support is provided separately with the effect of the consumer and producer mobility. In this work, the authors also highlighted the consumer delay and packet loss issue due to frequent updates of FIB. Mobility support is provided using a fog node that acts as the content caching node and is a fixed node. A location-aware ability of fog computing is a key here to solve the mobility and disconnected link issue in which a fog node is connected to the consumer node that ultimately keeps the record of its position.
A novel adaptive routing and switching scheme (NARSS) in [17] is another routing strategy deployed in SDN controller. This scheme dynamically selects the routing mechanism for specific types of traffic scenarios. At first, collection and extraction of the network data is performed to generate the routing scheme switching model. Secondly, a trained model is used for the deployment of artificial intelligence in SDN. An NDN-based software-defined vehicular network architecture (NSDVN) and BSAM, a broadcast mitigation routing mechanism, are proposed in [18]. In this work, a counter value was used to calculate the distance between vehicles, and the farthest node was selected as the node to further broadcast the packet. One more SDN supportive work has been done along with content-centric networking and VANETS. A detailed analysis of the SDN with a vehicular network is presented in [19]. The authors discussed the challenges and the need for SDN integration with vehicular networks and NDN.
In [20], a hybrid algorithm is proposed by combining a swarm optimization algorithm and a cuckoos search algorithm to find the best path for emergency data. The involvement of SDN in this algorithm allows for a global view of the network. Consumer mobility supportive novel protocol is proposed in SDN enabled Information Centric Networking (ICN) [21]. The edge computing model is used to support the consumer mobility. The authors proposed a mechanism of directional forwarding in which they deployed directional antennas in vehicles. In this way, nodes can forward the data in a specific direction. A contention-based forwarding strategy was proposed in [22] to support vehicle mobility. A timer-based scheme was used to identify the failure messages. There is very little research work on the mobility of the IoV in an SDN-enabled NDN environment. To the best of our knowledge, this is a novel work. In our proposed work, we are focused on eliminating the broadcast storm issue and issues related to the mobility of the vehicles in the IoV scenario.
3 Proposed Forwarding Mechanism in SDN Enabled NDN IoV (NDSDoV)
In this section, we discuss our proposed routing mechanism NDSDoV, which uses SDN and EC for the overall management of the network. The data structure of SDN consists of a global information table (GIT) and routing information table (RIT). GIT has the information of all the vehicles received from the EC and maintains the table with the information of vehicle ID, segment ID, speed, direction, content names, and position in a separate column against each vehicle ID. RIT maintains the best routing path after calculating the path estimation. Local information table (LIT) in EC has the information of all the vehicles received from each vehicle and maintains the table with the information of vehicle ID, segment ID, speed, direction content names, and position in a separate column against each vehicle ID. In our forwarding mechanism, we describe the complete process in which packets will be forwarded from the consumer node toward the producer node using the best path calculated by the SDN controller. Four types of packets are used in this proposed strategy: NDSDoV_Int_Pkt, NDSDoV_Data_Pkt, L_Info_Pkt, and EC_Info_Pkt, as shown in Fig. 3. NDSDoV_Int_Pkt and NDSDoV_Data_Pkt are the interest and data packets of NDN, respectively, with little modification according to the proposed strategy. Two leveled routing strategy was used in our proposed strategy. At first, vehicles will share the information, including vehicle ID, segment ID, speed, direction, content names, and position with the EC by broadcasting L_Info_Pkt. Later, gateway nodes and RSUs are responsible for the connectivity of road segments. We can assume that the vehicles near road intersections are gateway nodes.
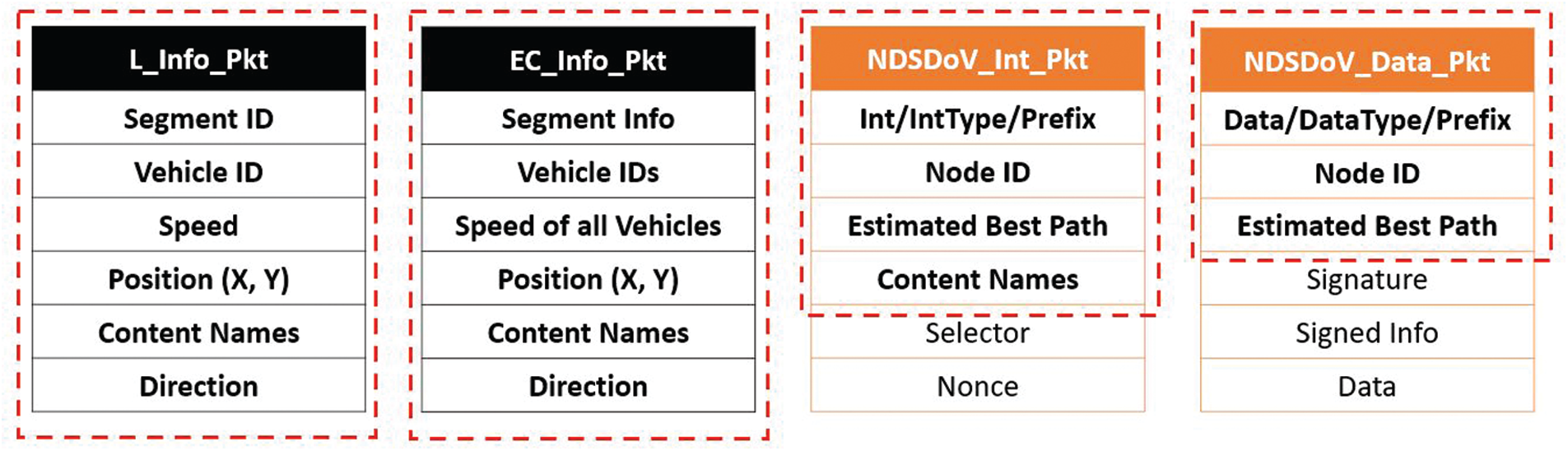
Figure 3: Packet formats in the NDSDoV forwarding model
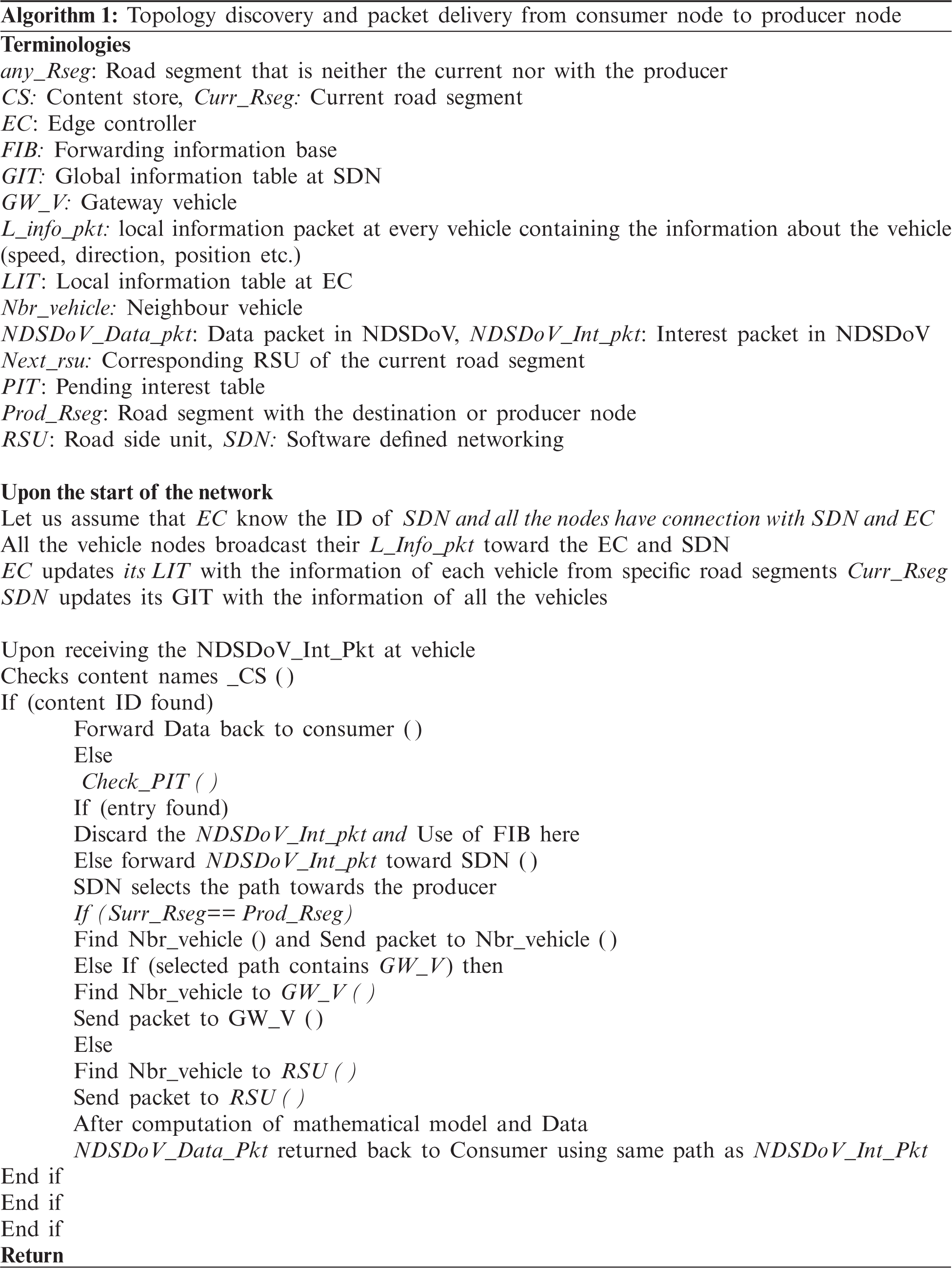
EC then forwards the information collected from the vehicles toward the SDN controller using EC_Info_Pkt, and the second level of routing starts from here. The SDN controller will maintain its table with the information received from the EC. The SDN controller can then estimate the shortest routing path using the information of the table. SDN computes the shortest path using the minimum hop count, relative velocity, and direction. After computing the shortest path, the SDN stores the path in ascending order. Selection of shortest path depends only on the roads with the vehicle’s density i.e., 15%–75%. Every time a vehicle receives the packet from the incoming port, it checks its flow table, and if it finds the content in the CS, then it forwards data back to the consumer. In an alternative scenario, the node forwards the packet toward the designation by using neighbor nodes and the direction of the destination node. A packet will be forwarded toward the gateway nodes or RSU. In the case of the destination being on another road segment, due to the broadcast nature of the NDN, a broadcast storm issue will occur. In this scenario, the naming scheme of NDN comes into play, and whenever an interest packet is being forwarded to a potential forwarder, that node will first match the path embedded in its naming scheme and then drop the packet in case of no matching ID in the embedded path. In another case, only the matching ID nodes send the packet further. This will reduce the total interest overheads and delay as well. Topology discovery and the complete forwarding mechanism are presented in Algorithm 1. The network setting of the IoV with SDN and EC is shown in Fig. 4. Tables inside vehicles can be used to perform further forwarding actions. The vehicle can send the packet to the SDN to check the forwarding port. The nodes do not send the data packet to the SDN controller but only send the size of the packet along with the stamp of the source and destination. SDN controller then sends packets having path estimation information toward the destination. As we discussed earlier, the shortest selection will be based upon the road vehicle density i.e., 15%–75%. Other parameters, such as hop count, speed, and direction, are used to compute the shortest path having more lifetime. More connection time is the key to finding the least speed difference between two vehicles. The vehicle updates its flow table after forwarding the packet to the destination. Another scenario occurs when the SDN controller fails; in this case, EC will take control of the segment and decide to forward the packet efficiently.

Figure 4: Network setting of NDSDoV with EC and SDN along with path estimation model settings
A hard timeout is set in every vehicle against every rule made by the controller. The entry is removed from the table whenever a vehicle goes out of the range or after a timeout. A source vehicle sends the data in unicast manners toward the destination until the path expires. A new path is computed by the SDN in case of the failure to complete the transfer of data. For this purpose, the SDN is being notified to recover the path. A valid flow entry in the flow table is investigated by the vehicle before sending the packet towards the destination. If there is no matching entry in the flow table, then the request is sent to the EC, and after checking its table, EC will then forward the query toward the controller. The controller updates the shortest path in the data plane toward the destination based upon information from the road segments and the vehicles on them. Vehicles along the path and RSUs receive the updated flow rule from the SDN controller. Source vehicle updates the controller to recompute the flow entries after sending failure messages in case of a change in topology when a neighbor node ran out of it. Whenever the SDN controller receives the failure notification, the shortest path will be recomputed, and a newly computed path is then updated in vehicles. The entry of a vehicle will be removed from the table after waiting for the soft-mount whenever it leaves the road segment without any data forwarding process. The value will remain there in the table if the value of a hard time is greater than the value of soft timer. Otherwise, the value of a hard time should be zero. There is another scenario in which a vehicle leaves the road segment with a transmission going on at the same time, then the SDN controller selects an updated topology path to further the transmission.
In our proposed scheme, the vehicle will forward a path failure notification toward the EC on the road segment, either in case of path flow entry removal or due to the topology change. For each road segment, the SDN controller computes the various best and shortest paths under its vicinity. The SDN controller will first check the type of failure whenever it receives a failure notification from the EC. If the EC receives a failure notification from inside the road segment, then it will check its table for the shortest path. In the case of path failure outside the road segment, there is always a route request forwarded to the SDN. EC can have various path failure notifications from various vehicles; in this case, the path failure request against the same path ID will be discarded by the EC.
It was observed that the vehicular network had a static network for a particular interval of time. However, up to a certain time, the change in topology can be predicted based on the mobility model. There are multiple communication links are available and possible between the source and the destination, and the path estimation for all of those paths is not always reasonable. Therefore, we focused on the on-demand routing strategy in terms of path estimation. Thus, the significance and table principle for path estimation is an exploration of average path intervals in our scheme. For our proposed scheme, we introduced a new probabilistic path estimation model. The exploration of the most durable and stable paths based on various parameters is the main remarkable property of our protocol. The parameters incorporated in our proposed scheme are the number of hops, link connectivity, direction, and velocity. Incorporating discrete parameters, the SDN controller determines the duration of each path to provide reliable links. Every vehicle perceives its velocity and its neighbors’ positions from the beacon. This information can be used to compute the connection time span of the two neighboring vehicles having valid communication ranges with each other.
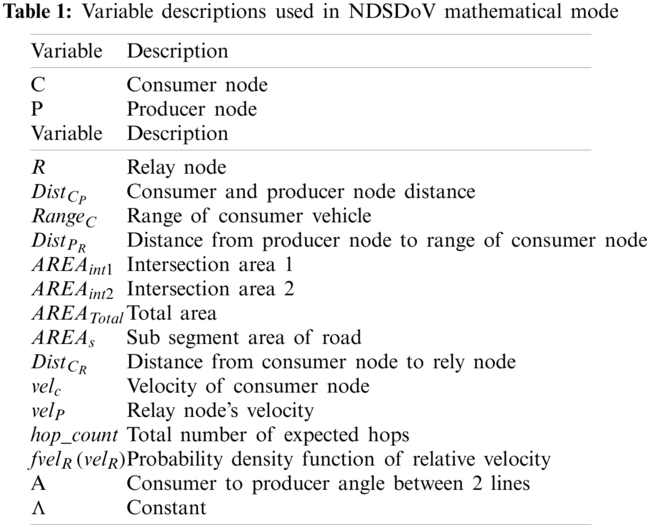
In this section, our aim is to deduce an expression for the duration of the path between two vehicles by deriving and calculating mathematical relations such as the number of hops and link duration. In our estimation model, a traditional traffic flow principle was used for data forwarding purposes to represent the vehicular environment efficiently. The vehicles were assumed to follow Poisson distribution to obtain the probability distribution function. The notations used are defined in Tab. 1.
To find a more stable and durable path between the consumer and the producer, a communication link with the minimum number of hops is required. As the closest node with the producer will cover the maximum distance and minimum hops. Hence, the farthest node from the consumer and closest node to the producer will be selected to forward the packet. The very purpose directs the need to find the area of the intersection of circles to find the next hop with the maximum communication range. We can find the area of the region using the standard formula in Eq. (1).
We can calculate the total area of both segments by Eqs. (1) and (2).
However,
and
We can use Eq. (5) to find that the area of the entire region is
Estimation of the path depends significantly on the speed and direction of the vehicle. Link duration is directly affected by the direction of the vehicle. The mathematical model for path estimation proposed in our work was also used in [23]. We extended our work done in [24]. Here, we compute the relative velocity of the node. We have a scenario of moving vehicles in both directions. vel1 and vel2 is the velocity of both of the vehicles with a distance between them represented as d and the range between the communication link is R. Four general cases are presented for moving the vehicle’s velocity here.
In scenario 1, when both vehicles have the same velocity and direction then
We can represent
We can use the above formula with the positive sign if the direction is opposite for both of the vehicles, and minus sign can be used for the same direction with velocity
3.1.3 Average Number of Vehicles
To find the number of hops between consumer and producer nodes, it is essential to find the average number of neighbor nodes between them. Within the transmission range, the Poisson distribution model is used for the available vehicles on the road. The probability of finding the producer node and next hop is the same. The distance from the consumer to the first next hop can be calculated using Eq. (8).
The most important estimation is the link duration estimation of every vehicle that is significant for finding the best route having durable and maximum duration. As we know, time = distance/speed
In Eq. (9), the distance and span of the next hop node inside the communication range is
Residual link life would be
We have to find the distance beyond which the vehicle moves out of the communication range that is
One of the fundamental design parameters in VANET is complete path estimation. The probability density function of path duration can be determined by considering the remaining link life of the hops.
We can compute the average path duration using Eq. (14).
3.2 Working of the Edge Controller
In this section, we discuss the working of the proposed EC in our scheme for the mobility issue. Link breakage due to the topology change is a critical issue in VANETs, which affects the overall performance of the network very badly. The focus of this section is to overcome the issue of mobility. In our proposed research model, the main work of EC is to collect the information from every vehicle to know the exact topology in real-time. Vehicles periodically send their information to the EC, including direction, road ID, position, and speed. EC checks the vehicle details in its table after receiving the information from the vehicle. In case of a legitimate change in the position of the vehicle, it will update the SDN controller with the latest information; otherwise, EC will update its database on new vehicle entry. This approach to updating the SDN results in fewer network overheads. Vehicles provide information to the EC at a regular interval of time that is 0.2 s, which is calculated after many simulations. This time can be changed according to the type of traffic and road conditions. More frequent information will be required in the case of high-speed movement of the vehicles. There are two different scenarios to send the L_Info_Pkt and EC_Info_Pkt to the SDN controller: (a) a packet can be sent to the SDN after a fixed interval of time, (b) a packet can be sent after a specific change in the position of the vehicle, that is, 20–30 m.
Calculation of the hello interval is performed using Eq. (15). Here, the estimation of the interval is based on the distance covered in a specific time and velocity. Every vehicle first calculates the interval time using Eq. (16) and compares it with the fixed time. After this, it finally selects the minimum value.
In this section, different simulation parameters and matrices are used to evaluate the performance of our proposed protocol NDSDoV. We compared NDSDoV with native BSMS and BSAM protocols. We discuss the results graphs to show the clear difference in the performance of our protocol.
In our proposed mechanism, we used ndnSIM [25] over NS-3 for the simulation experiments. In our simulation environment, we used two wireless access technologies for our vehicles. We used cellular 3G/LTE and IEEE 802. 11 OCB face. IEEE 802.11 OCB face is very efficient in terms of data mulling and high-speed opportunistic connectivity. Our scheme uses the best face to forward the packet according to the packet type. We used a traffic generator SUMO, and the total number of vehicles was 20–100.
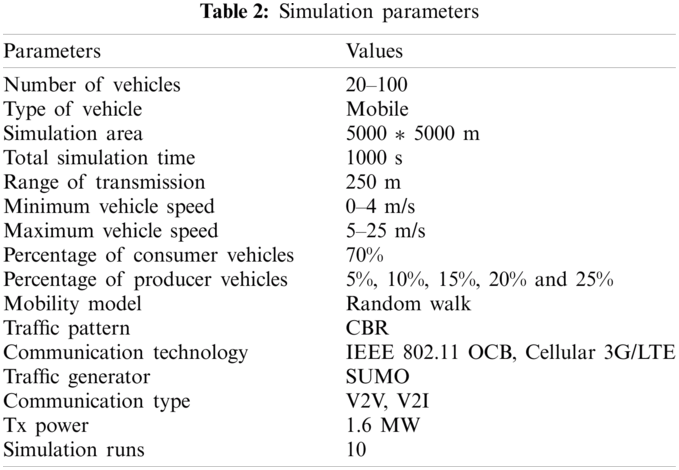
The transmission range of each node was 250 m. The network range in our simulation was 5000 m2. We used variable topology density over different numbers of sender/receiver pairs of vehicles in the IoV scenario to have clear results. The percentage of senders or consumer vehicles was 70%. The percentage of producer vehicles was different (i.e., 5%, 10%, 15%, 20%, and 25%.) Constant bit rate (CBR) was used to generate the packets in the network. The total simulation time was 1000 s, but we evaluated it at different simulation times from 200, 400, 600, 800, and 1000 s for more clear results. Proposed forwarding strategy NDSDoV was evaluated over 10 independent runs against comparative schemes. The simulation parameters are described in Tab. 2.
4.2 Simulation Graphs and Results
Three different performance matrices were used to evaluate the results of the NDSDoV model.
(a) Total number of retransmissions: This defines the total number of unsuccessful data packets retransmitted again by the sender nodes due to any network issue.
(b) End-to-end delay: This defines the total average delay from the initiation of the Interest packet until the completion of the transmission process.
(c) Interest packet satisfaction rate: This defines the total number of packets successfully delivered.
We evaluated the performance of NDSDoV and comparative schemes against the average speed of the vehicle, simulation time, and a number of producer pairs.
In Fig. 5a, the performance of NDSDoV regarding end-to-end delay is shown, which depends on the congestion and number of hops. The value of the x-axis is the speed of vehicles (m/s) and the value of the y-axis is end-to-end delay (s). We evaluated our proposed scheme and comparative scheme with a speed range of 0–25 m/s. NDSDoV performed better because of the distributed strategy of our scheme, in which we took real-time information at EC and SDN and maintained the path efficiently and re-actively for every RSU and road segment. The distributed management of the packets in NDSDoV resulted in a better end-to-end delay. The broadcast storm avoidance mechanism decreased congestion and unnecessary overhead in the network, which eventually yielded significantly better results.
In Fig. 5b, we evaluated the performance of NDSDoV regarding end-to-end delay against the producer pairs. The value of the x-axis is the percentage of producer vehicle, and the value of the y-axis is the end-to-end delay (sec). We evaluated our proposed scheme and comparative scheme with a producer vehicle percentage of 5%–25%. NDSDoV performed better than BMAS and BSMS.
Fig. 5c shows an evaluation of the comparative schemes BMAS and BSMS with our proposed NDSDoV against retransmissions. The value of the x-axis is the speed of the vehicle (m/s) and the value of the y-axis is the total number of retransmissions. We evaluated our proposed scheme and comparative scheme with a speed range of 0–25 m/s. NDSDoV performed better in this scenario. The use of an edge controller to deal with the transmission at each road segment and the efficient use of an SDN controller mitigated the broadcast storm by selecting the path after carefully evaluating the parameters of a vehicle, which resulted in a reduced number of retransmissions.
We evaluated the comparative schemes BMAS and BSMS with our proposed NDSDoV against the packet satisfaction ratio in Fig. 5d. The value of the x-axis is the simulation time (s), and the value of the y-axis is the packet satisfaction ratio. We evaluated our proposed scheme and comparative scheme with a simulation time of 200–1000 (s). Efficient use of EC and SDN with a path estimation model resulted in a better packet satisfaction ratio. With increased simulation time, the packet satisfaction ratio was decreased. Taken together, these findings show that our proposed scheme outperformed other comparative schemes.

Figure 5: Performance analysis of NDSDoV (a) End-to-end delay (sec) w.r.t speed of vehicles (m/s) (b) End-to-end delay w.r.t percentage of producer vehicles (c) Total number of retransmissions w.r.t speed of vehicles (m/s) (d) Packet satisfaction ratio w.r.t simulation time (sec)
In this paper, a novel and efficient forwarding mechanism, NDSDoV, has been introduced that supports the mobility of the vehicles in addition to exploring the cellular network for the control message to and from the SDN controller and EC with low latency. Our proposed mechanism also mitigates the broadcast storm issue. In the IoV environment, we introduced the concept of EC to maintain and manage in-time and real-time vehicular topology. In our work, we also proposed a mathematical estimation model that assists centralized EC and SDN in finding the most reliable and durable path. The simulation graphs and results of NDSDoV outperformed other schemes in terms of availability with limited routing overhead, packet retransmissions, minimized delay, and increased packet satisfaction ratio.
Acknowledgement: This research was financially supported by the Ministry of Trade, Industry and Energy (MOTIE) and Korea Institute for Advancement of Technology (KIAT) through the National Innovation Cluster R&D program (R&D, P0015131).
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. A. K. Dutta, M. Elhoseny, V. Dahiya and K. Shankar, “An efficient hierarchical clustering protocol for multi-hop internet of vehicles communication,” Transactions on Emerging Telecommunications Technologies, vol. 31, no. 5, pp. 36–90, 2020. [Google Scholar]
2. S. Sharma and B. Kaushik, “A survey on internet of vehicles: Applications, security issues & solutions,” Vehicular Communications, vol. 20, no. 4, pp. 100–182, 2019. [Google Scholar]
3. L. Zhang, A. Afanasyev, J. Burke, V. Jacobson, C. K. Claffy et al., “Named data networking,” ACM SIGCOMM Computer Communication Review, vol. 44, no. 3, pp. 66–73, 2014. [Google Scholar]
4. G. Grassi, D. Pesavento, G. Pau, R. Vuyyuru, R. Wakikawa et al., “VANET via named nata networking,” in IEEE INFOCOM WKSHPS, Toronto, Canada, pp. 410–415, 2014. [Google Scholar]
5. J. Ali, G. M. Lee, B. H. Roh, D. K. Ryu and G. Park, “Software-defined networking approaches for link failure recovery: A survey,” Sustainability, vol. 12, no. 10, pp. 4255, 2020. [Google Scholar]
6. J. Ali and B. H. Roh, “Quality of service improvement with optimal software-defined networking controller and control plane clustering,” Computers, Materials & Continua, vol. 67, no. 1, pp. 849–875, 2021. [Google Scholar]
7. J. Ali, B. H. Roh and S. Lee, “QoS improvement with an optimum controller selection for software-defined networks,” Plos One, vol. 14, no. 5, pp. e0217631, 2019. [Google Scholar]
8. J. Ali and B. H. Roh, “An effective hierarchical control plane for software-defined networks leveraging TOPSIS for end-to-end QoS class-mapping,” IEEE Access, vol. 8, pp. 88990–89006, 2020. [Google Scholar]
9. F. Bannour, S. Souihi and A. Mellouk, “Distributed SDN control: Survey, taxonomy, and challenges,” IEEE Communications Surveys & Tutorials, vol. 20, no. 1, pp. 333–354, 2017. [Google Scholar]
10. O. S. Al-Heety, Z. Zakaria, M. Ismail, M. M. Shakir, S. Alani et al., “A comprehensive survey: Benefits, services, recent works, challenges, security, and use cases for SDN-VANET,” IEEE Access, vol. 8, pp. 91028–91047, 2020. [Google Scholar]
11. A. Tariq, R. A. Rehman and B. S. Kim, “Forwarding strategies in NDN-based wireless networks: A survey,” IEEE Communications Surveys & Tutorials, vol. 22, no. 1, pp. 68–95, 2019. [Google Scholar]
12. H. Khelifi, S. Luo, B. Nour, H. Moungla, Y. Faheem et al., “Named data networking in vehicular ad hoc networks: State-of-the-art and challenges,” IEEE Communications Surveys & Tutorials, vol. 22, no. 1, pp. 320–351, 2019. [Google Scholar]
13. S. H. Bouk, S. H. Ahmed, D. Kim and H. Song, “Named data networking based ITS for smart cities,” IEEE Communications Magazine, vol. 55, no. 1, pp. 105–111, 2017. [Google Scholar]
14. J. M. Duarte, T. Braun and L. A. Villas, “MobiVNDN: A distributed framework to support mobility in vehicular named data networking,” Ad Hoc Networks, vol. 82, no. 6, pp. 77–90, 2019. [Google Scholar]
15. M. Burhan and R. A. Rehman, “BSMS: A reliable interest forwarding protocol for NDN-based VANETs,” in IEEE ICACS, Lahore, Pakistan, pp. 1–6, 2020. [Google Scholar]
16. L. Zhao, W. Zhao, A. Al-Dubai and G. Min, “A novel adaptive routing and switching scheme for software-defined vehicular networks,” in IEEE ICC, Shanghai, China, pp. 1–6, 2019. [Google Scholar]
17. C. Zhao, M. Dong, K. Ota, J. Li and J. Wu, “Edge-map reduce-based intelligent information-centric IoV: Cognitive route planning,” IEEE Access, vol. 7, pp. 50549–50560, 2019. [Google Scholar]
18. A. Arsalan and R. A. Rehman, “Distance-based scheme for broadcast storm mitigation in named software-defined vehicular networks (NSDVN),” in IEEE Annual Consumer Communications & Networking Conf., Las Vegas, USA, pp. 1–4, 2019. [Google Scholar]
19. S. H. Ahmed, S. H. Bouk, D. Kim, D. B. Rawat and H. Song, “Named data networking for software-defined vehicular networks,” IEEE Communications Magazine, vol. 55, no. 8, pp. 60–66, 2017. [Google Scholar]
20. M. Alowish, Y. Shiraishi, Y. Takano, M. Mohri and M. Morii, “A novel software-defined networking controlled vehicular named-data networking for trustworthy emergency data dissemination and content retrieval assisted by evolved interest packet,” International Journal of Distributed Sensor Networks, vol. 16, no. 3, pp. 1550147720909280, 2020. [Google Scholar]
21. P. Benedetti, G. Piro and L. A. Grieco, “A softwarized and MEC-enabled protocol architecture supporting consumer mobility in information-centric networks,” Computer Networks, vol. 188, pp. 107867, 2021. [Google Scholar]
22. J. Wang, J. Luo, J. Zhou and Y. Ran, “A mobility-predict-based forwarding strategy in vehicular named data networks,” in IEEE-GLOBECOM, Taipei, Taiwan, pp. 16, 2020. [Google Scholar]
23. M. T. Abbas, A. Muhammad and W. C. Song, “Road-aware estimation model for path duration in internet of vehicles (IoV),” Wireless Personal Communications, vol. 109, no. 2, pp. 715–738, 2019. [Google Scholar]
24. A. Tariq, R. A. Rehman and B. S. Kim, “EPF—An efficient forwarding mechanism in SDN controller enabled named Data IoTs,” Applied Sciences, vol. 10, no. 2, pp. 7675, 2020. [Google Scholar]
25. S. Mastorakis, A. Afanasyev and L. Zhang, “On the evolution of ndnSIM: An open-source simulator for NDN experimentation,” in ACM SIGCOMM, Los Angeles, CA, USA, vol. 47, pp. 19–33, 2017. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |