DOI:10.32604/cmc.2021.018282
| Computers, Materials & Continua DOI:10.32604/cmc.2021.018282 | |
| Article |
Multi-Criteria Prediction Mechanism for Vehicular Wi-Fi Offloading
1Department of Computer Engineering and IT, Faculty of Engineering, Zanzibar University, Zanzibar, Tanzania
2Department of Information Technology, College of Computing and Informatics, Saudi Electronic University, Riyadh, 93499, Saudi Arabia
3Department of Electronics and Telecommunications Engineering, College of ICT, University of Dar es Salaam, Tanzania
4Department of Information Technology, College of Computer and Information Sciences, Princess Nourah Bint Abdulrahman University, Riyadh, 84428, Saudi Arabia
5Faculty of Science, Universiti Brunei Darussalam, Negara Brunei Darussalam
*Corresponding Author: Maha Abdelhaq. Email: msabdelhaq@pnu.edu.sa
Received: 03 March 2021; Accepted: 08 April 2021
Abstract: The growing demands of vehicular network applications, which have diverse networking and multimedia capabilities that passengers use while traveling, cause an overload of cellular networks. This scenario affects the quality of service (QoS) of vehicle and non-vehicle users. Nowadays, wireless fidelity access points Wi-Fi access point (AP) and fourth generation long-term evolution advanced (4G LTE-A) networks are broadly accessible. Wi-Fi APs can be utilized by vehicle users to stabilize 4G LTE-A networks. However, utilizing the opportunistic Wi-Fi APs to offload the 4G LTE-A networks in a vehicular ad hoc network environment is a relatively difficult task. This condition is due to the short coverage of Wi-Fi APs and weak deployment strategies of APs. Many studies have proposed that offloading mechanisms depend on the historical Wi-Fi connection patterns observed by an interest vehicle in making an offloading decision. However, depending solely on the historical connection patterns affects the prediction accuracy and offloading ratio of most existing mechanisms even when AP location information is available. The present study proposed a multi-criteria wireless availability prediction (MWAP) mechanism, which utilizes historical connection patterns, historical data rate information, and vehicular trajectory computation to predict the next available AP and its expected data capacity in making offloading decisions. The proposed mechanism is decentralized, where each vehicle makes the prediction by itself. This characteristic helps the vehicle users make a proactive offloading decision that maintains the QoS for different applications. A simulation utilizing MATLAB was conducted to evaluate the performance of the proposed mechanism and benchmark it with related state-of-the-art mechanisms. A comparison was made based on the prediction error and offloading ratio of the proposed mechanism in several scenarios. The MWAP mechanism exhibited a lower prediction error (i.e., below 20%) and higher offloading ratio (i.e., above 90%) than the existing mechanisms for several tested scenarios.
Keywords: Vehicular network; markov predictor; 4G LTE-A; Wi-Fi offloading; prediction model; heterogeneous network
An increase in mobile data devices was observed in recent years with the increasing number of data-hungry applications, which demand unlimited Internet services. Cisco’s [1] latest projection shows that by the end of 2020, 1.5 mobile devices per capita will be reached, which amounts to approximately 11.6 billion devices. All of these devices will require a direct connection to cellular-based networks. Given this anticipation, cellular network overload is expected in the near future. Several studies have proposed the wireless fidelity (Wi-Fi) or Femtocell as alternative networks to offload cellular traffic [2,3]. However, Wi-Fi is already widely utilized as a standard offloading medium [4,5]. Several traffic parts directed to the cellular network are re-directed to the Wi-Fi network [4,5]. This mechanism can lower the congestion in cellular networks and the cost imposed on the network users. People generally spend a significant amount of time on the road and require a suitable connection to the Internet or other vehicular network applications [6].
The automotive industry and research community are currently contemplating on deploying networks among vehicles to enable inter-vehicle communication utilizing ad hoc architecture, which is referred to as vehicular ad hoc network or VANET [7]. However, VANET itself cannot cope with the increasing demands of network applications that vehicle users require while traveling [8]. VANET must be integrated with other network technologies, such as Wi-max, Wi-Fi, and cellular networks (i.e., third generation (3G), 4G long-term evolution (LTE), and 4G LTE advanced (LTE-A)) to form a robust and reliable heterogeneous vehicular network (HVN) [6]. This particular cellular network is commonly adopted as the best option in providing dependable and pervasive Internet access to vehicles because it is well deployed and covers larger areas compared with other types of network technologies [8].
However, a simple integration of VANET to cellular networks can elevate the overload problem and degrade the QoS of both vehicle and non-vehicle users [9,10]. Previous researchers focused on utilizing opportunistic Wi-Fi to offload cellular traffic generated by vehicle users [5,8,11,12], which is called vehicle Wi-Fi offloading (VWO). The traffic generated by vehicles that is directed to the cellular network is redirected to either the opportunistic Wi-Fi access point (AP) or other vehicles for offloading purposes in VWO. Approximately 65% of cellular data can be offloaded by the simple offloading of traffic from cellular networks to Wi-Fi wherever {Wi-Fi} connectivity is present [2,13,14]. By the end of 2027, all vehicles are expected to equip with On-board Units (OBUs which enable vehicular networks to be integrated with cellular networks and other Wi-Fi networks through different network interfaces and channels [15]. Nevertheless, many Wi-Fi APs are available globally and can be utilized as a cost-effective solution for vehicular Internet access [9,16]. Therefore, Wi-Fi for offloading cellular traffic (i.e., VWO) is an attractive solution. Wi-Fi APs are widely deployed in an urban environment unlike rural or sub-urban environments. City vehicles are expected to move at low speeds and can detect several Wi-Fi APs; users can then decide to switch to Wi-Fi and offload the cellular data through the opportunities available from drive-thru Internet access [17]. However, the vehicle user requires prior information regarding the next Wi-Fi accessibility for the VWO to be efficiently adopted.
The current study proposed a multi-criteria wireless availability prediction (MWAP) mechanism in the HVN architecture. The objective of the proposed MWAP mechanism is to provide vehicle users prior information of the next Wi-Fi availability and its expected data capacity in making proactive offloading decisions. The proposed MWAP mechanism utilizes three criteria in predicting the next Wi-Fi AP availability and its expected capacity: historical connection patterns, vehicle trajectory, and historical data rate information. The proposed MWAP mechanism employs historical connection patterns and vehicle trajectory computation, as well as foresees the next available Wi-Fi AP. Moreover, it utilizes the historical data rate observed by the interest vehicle (IV) to predict the average data rate used by the said IV, which helps optimize the offloading decision. The offloading decision is based on the delay requirement of the applications together with the expected capacity of the future Wi-Fi AP. This mechanism ensures that the QoS of the distinctive applications are maintained. The proposed mechanism not only decreases the load from the cellular infrastructure but also saves the cost for vehicle users when connected directly to the cellular infrastructure.
The proposed MWAP mechanism differs from other related state-of-the-art mechanisms in terms of the following three aspects. First, it is decentralized, whereby each vehicle makes the prediction itself; this condition lowers the burden to the core network in processing the offloading decision of each vehicle located in its coverage zone. Second, the proposed multiple criteria are utilized in making the offloading decision, such as historical connection patterns, vehicular trajectory computation, and historical data rate recorded. The utilization of multi-criteria in offloading decisions ensures that the IV makes accurate and timely offloading decisions with minimum error. Third, we optimized the prediction accuracy by utilizing the first- and second-order Markov predictor in predicting the next Wi-Fi AP and its capacity.
The rest of this paper is organized as follows. Section 2 briefly discusses background and related works. Section 3 explains the proposed MWAP mechanism. Section 4 discusses the performance evaluation of the MWAP mechanism. Finally, Section 5 presents the conclusion.
2 Background and Related Studies
The vehicles’ mobility in VANET is not random; it normally follows certain patterns that depend on the road topology, traffics lights, and driver frequency destination points. However, these patterns are inconsistent and require the availability of additional parameters, such as vehicle velocity, locations, and direction, to accurately predict the next user location. Previous authors proposed several next user location prediction techniques based on the Markov prediction model [18–21].
Nicholson et al. in [21] proposed the breadCrumbs system to predict mobile connectivity. This system adopts the second-order Markov predictor that involves the previously visited and current locations to predict the future location. The said system also establishes an AP quality database to store the bandwidth observed from different APs. The breadCrumbs system can forecast connectivity by combining the mobility prediction and AP quality database. Their results show that the prediction accuracy of breadCrumbs is >70% for the first prediction step. However, its accuracy decreases when the step number increases.
Nevertheless, Prasad et al. [18] adopted the hidden Markov model to predict the future AP based on previously encountered AP and currently connected AP. Their work shows that the prediction error increases exponentially as the AP number increases.
Furthermore, Gambs et al. in [20] proposed an algorithm that predicts the future user location utilizing the number (n) of previously visited locations. The proposed algorithm was developed based on the mobility Markov chain. The accuracy of the algorithm was confirmed utilizing three datasets, and the result shows that the prediction efficiency of the algorithm is between 70% and 95% when the number of previously visited locations (n) is 2. Moreover, the authors highlighted that no significant outcome was obtained in terms of the prediction efficiency when n increased.
Most of the proposed mobility prediction models focus on low mobility. The said issues are not properly addressed for high-mobility models such as VANET.
The issue of predicting the next AP encounter by mobile users in a vehicle scenario is discussed in [22,23]. Zhang et al. [22] utilized a contact map to anticipate the next potential APs and their respective transition probabilities. The proposed contact map was represented as a graph, where the vertex symbolizes the AP, and the edges represent the transition contexts. A table of three columns was created to store the contact map information. These three columns store the coordinates of the next AP, previous AP, and transition probabilities. Whenever a vehicle user wants to predict the next AP, he/she employs the lookup function to view the table and foresee the next AP that it can encounter. However, the prediction in the said work relies only on the previously connected AP to determine the future contacted AP. Vehicle trajectory is not considered, which is crucial to optimize the prediction accuracy.
Furthermore, Almulla et al. [23] considered the AP positions and vehicle movement direction in predicting the future AP. A global positioning system (GPS) was employed to obtain the AP position and vehicle movement direction. The vehicle user has to create a queue of three elements, namely, the coordinates of the three latest different positions of the moving vehicle. The vehicle has to determine if the distance between the previous and current vehicle positions is larger than the pre-determined distance threshold to update this queue. If yes, then the oldest value in the queue is removed and a new position is inserted. However, if the queue contains three values (i.e., full), then two angles are computed and compared with the pre-defined angle threshold. If the calculated angles are larger than the angle threshold, then the vehicle detects the turning effect that improves the prediction mechanism to the next AP. However, the proposed method suffers from false positive and negative errors when detecting the turning event of the vehicle.
François et al. [24] compared the performance of the centralized and decentralized strategies in foreseeing future wireless availability. The authors investigated these two strategies and evaluated their reliability and accuracy. The AP is the prediction agent in the centralized approach, and predicting the future APs of the connected mobile users is one of its duties. By contrast, each mobile user in the decentralized approach predicts the future AP himself. Utilizing the real dataset demonstrates that the decentralized approach shows more reasonable accuracy compared with the centralized approach. This result was also confirmed in [25–27], where the decentralized approach was utilized, and the prediction accuracy was significantly improved.
Recently, several VWO methods were proposed in this domain. The goal of these methods is to employ Wi-Fi APs encountered by the vehicles to offload cellular data. However, the vehicle must have prior information of the availability of the next APs and their expected data capacity for the proposed method to be feasible. This mechanism can help the vehicle user make an earlier decision depending on the delay application requirement imposed by the specific application.
Balasubramanian et al. [28] proposed the Wiffler model to relieve the 3G capacity. This model predicts the next Wi-Fi connectivity utilizing the historical number of Wi-Fi AP encountered. The proposed model makes the offloading decision based on the maximum delay requirement of several applications. It checks if the delay requirement is not tight and the transmission to Wi-Fi is completed within the application delay threshold. The data will wait and be transferred only when the Wi-Fi AP is encountered. Otherwise, the data is transferred directly to the cellular network. The proposed model shows a more than 20% prediction error for the 100-s prediction interval. Moreover, the model offloads 45% of cellular data for the applications with a delay threshold of 60 s.
Wang et al. [29] proposed an offloading mechanism that offloads cellular data and maintains user satisfaction. The offloading mechanism depends on predicting the next AP the vehicle can encounter. The said work is based on the assumption that the meeting interval of the vehicles and APs takes after the exponential Gaussian distribution. The vehicle must calculate the time to reach the next AP to make an offloading decision. If the estimated time is below the delay tolerance value, then the vehicle must wait for the next AP for network connection. If the vehicle never meets the next AP as expected, then the vehicle has to re-calculate the meeting time by considering the previous calculation and making a new offloading decision. However, if the estimated meeting time is higher than the delay tolerance value, then the vehicle will directly send the traffic to the cellular network.
The proposed MWAP mechanism depends on the HVN architecture. Fig. 1 shows the proposed system model for MWAP. The MWAP mechanism is based on the urban scenario, whereas the Manhattan model [29] is adopted as a mobility model. The proposed system model consists of vertical and horizontal streets with several intersections. Every street road comprises two lanes where the vehicles move in opposite directions. The vehicle can turn left, right, or move ahead at an intersection in our model. Wi-Fi and 4G LTE-A networks are available, but the Wi-Fi APs do not cover the entire area. Wi-Fi APs are placed at the crossing point of two streets so that the vehicles from both streets are guaranteed to obtain an appropriate communication signal without any interference problem from the surrounding buildings. We also assume that all available Wi-Fi APs are in open access mode, do not overlap one another, and have adequate bandwidth to serve the vehicle number. Each IV contains an OBU, which has two network interfaces that can communicate with a Wi-Fi AP and LTE evolved-UMTS terrestrial radio access network (LTE E-UTRAN) Node B (also named LTE eNB in Fig. 1). Every IV is additionally outfitted with GPS, which is utilized to overhaul the areas where the IV is associated and disengaged to the particular Wi-Fi AP.
Three criteria are utilized to foresee the next Wi-Fi AP that meets the IV based on Fig. 1: (1) historical connection patterns, (2) vehicular trajectory computation, and (3) historical data rate information. The IV records only the successful connection the APs encountered during its daily routine in the case of historical connection patterns. This condition includes the previous Wi-Fi AP contacted by IV
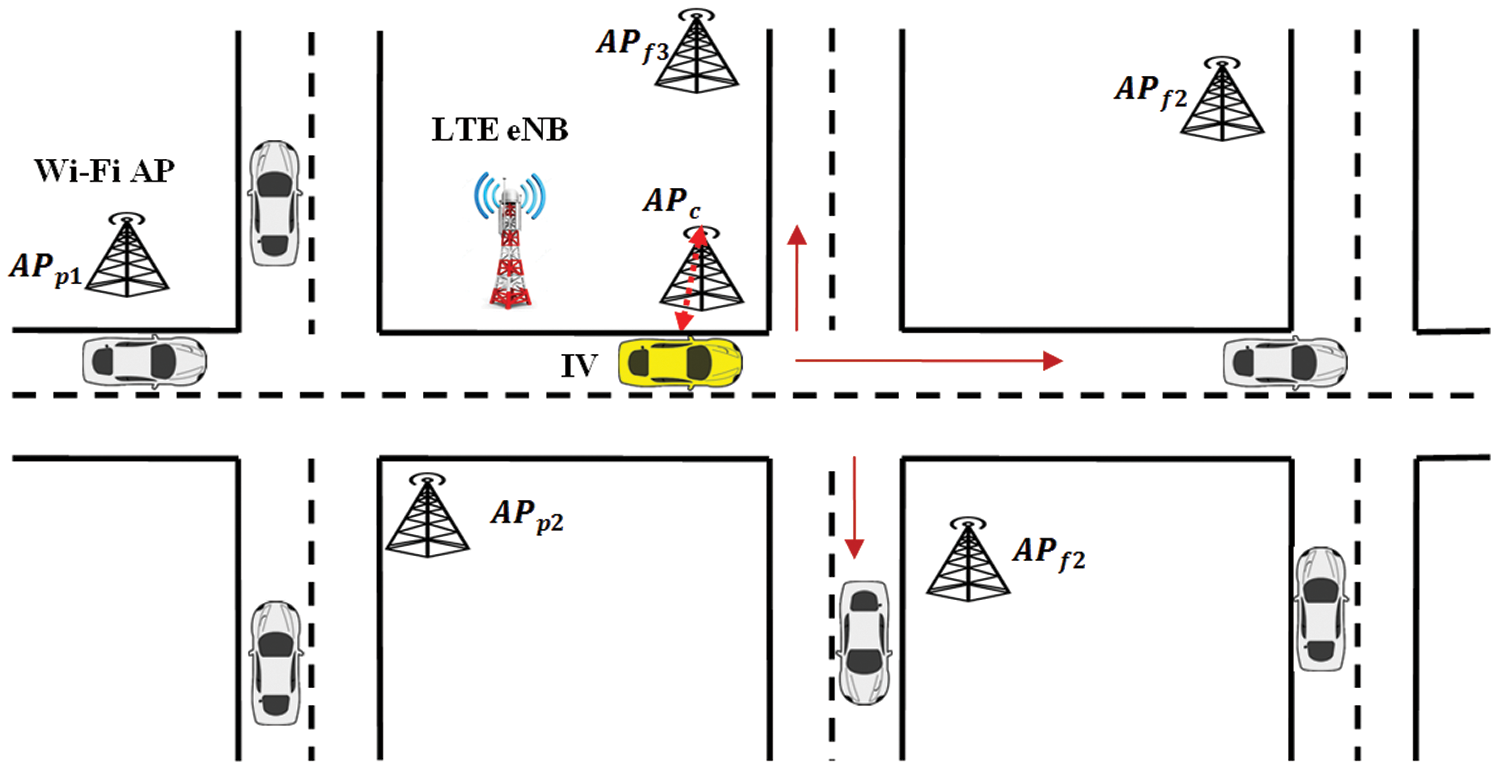
Figure 1: MWAP system model
Vehicular trajectory is determined at the point where the IV wants to foresee the future Wi-Fi AP. The IV then computes the third probability that confirms if the IV moving direction is toward the anticipated Wi-Fi AP
3.2 Historical Connection Patterns
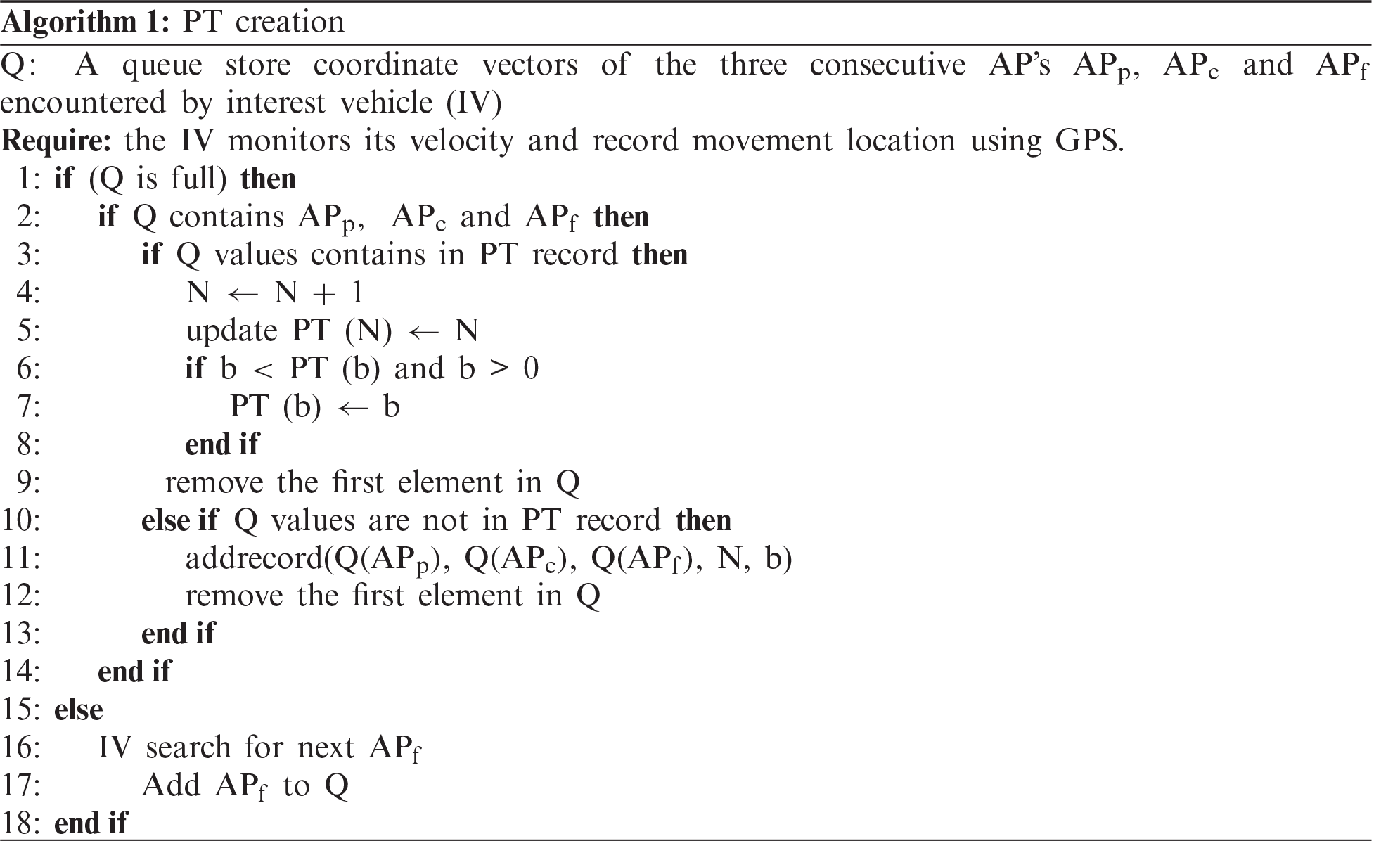
In Algorithm 1, a queue Q of three elements is formed to store the position data of the three consecutive connected Wi-Fi APs by the IV (refer to Fig. 1). These elements are labeled as
With a specific objective to process vehicular direction, two angles must be computed. The computed angles determine how close the IV is moving toward the future Wi-Fi AP. The computation varies from the technique proposed in [23], which required only a single angle to determine the moving bearing of the vehicle. We contend that one point is insufficient to determine the moving bearing of the vehicle, because the driver can choose to alter the direction at any interim of time. However, the ultimate objective is to increase the prediction accuracy and minimize the computation time. The MWAP mechanism proposed an additional angle of computation to occur at a certain distance from the first angle position calculation. Fig. 2 shows that these two angles are calculated at positions
where
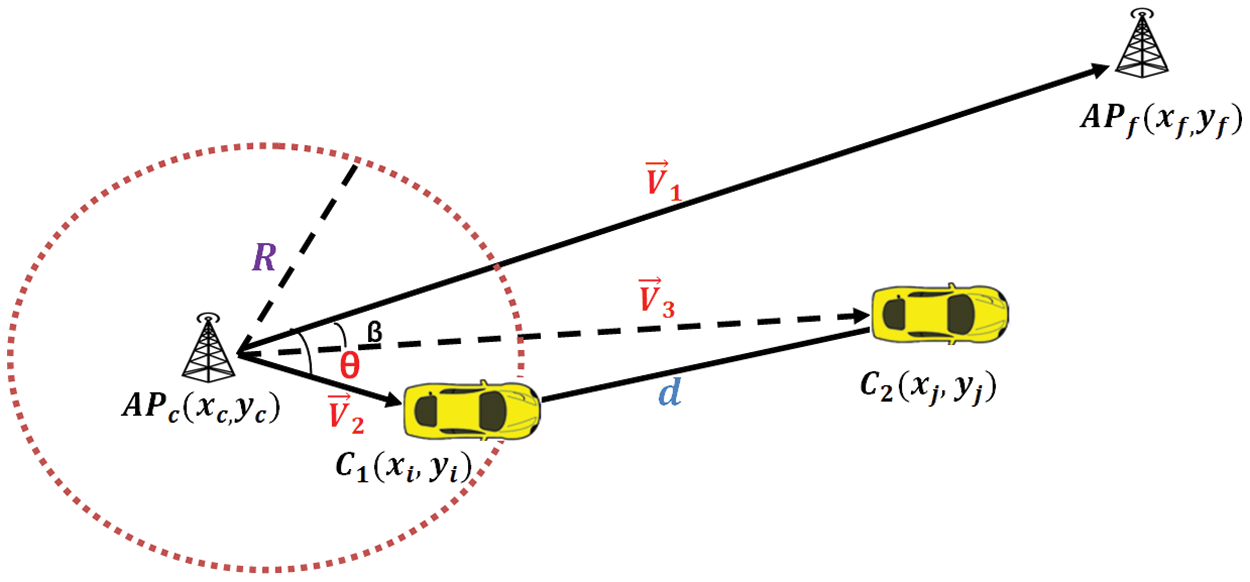
Figure 2: Vehicular trajectory
In Fig. 2, R is the coverage radius of
As mentioned above, the angles
3.4 Historical Data Rate Information
In this part, we propose a method for predicting an average data rate for different applications’ usage based on the delay requirement of the application type. The average data rate prediction is based on the historical data rate information recorded by the IV. Each application is kept in its specific group G based on its delay requirement. The groups range from 1 to n (i.e.,
where
The IV computes
where
Moreover, the average data rate
where
3.5 Design of the MWAP Mechanism
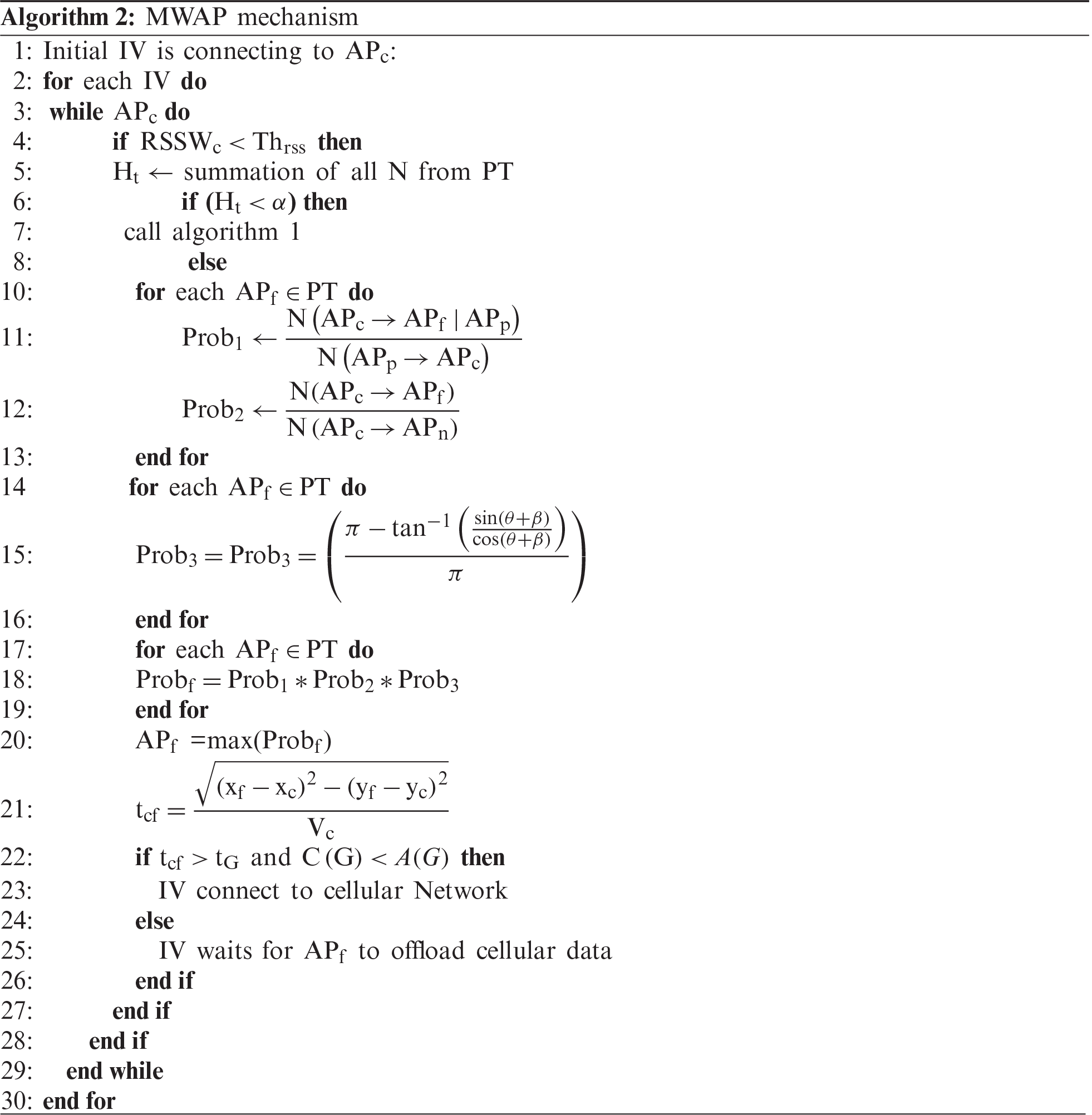
When the cellular network is available and the IV observed its RSS at the current Wi-Fi
where RSS is the received signal strength,
Furthermore, the IV computes two probabilities Eqs. (16) and (17). Moreover, to increase the prediction accuracy, the IV also computes the probability the IV is moving toward a specific Wi-Fi AP, using Eq. (18). Finally, the IV computes the probability product
Let
where
where
where
where
where n
where
4 Performance Evaluation and Result Analysis
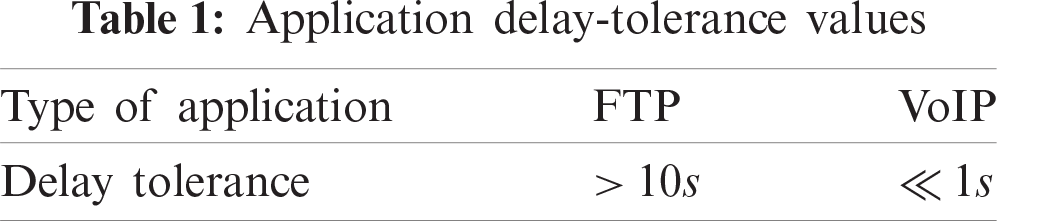
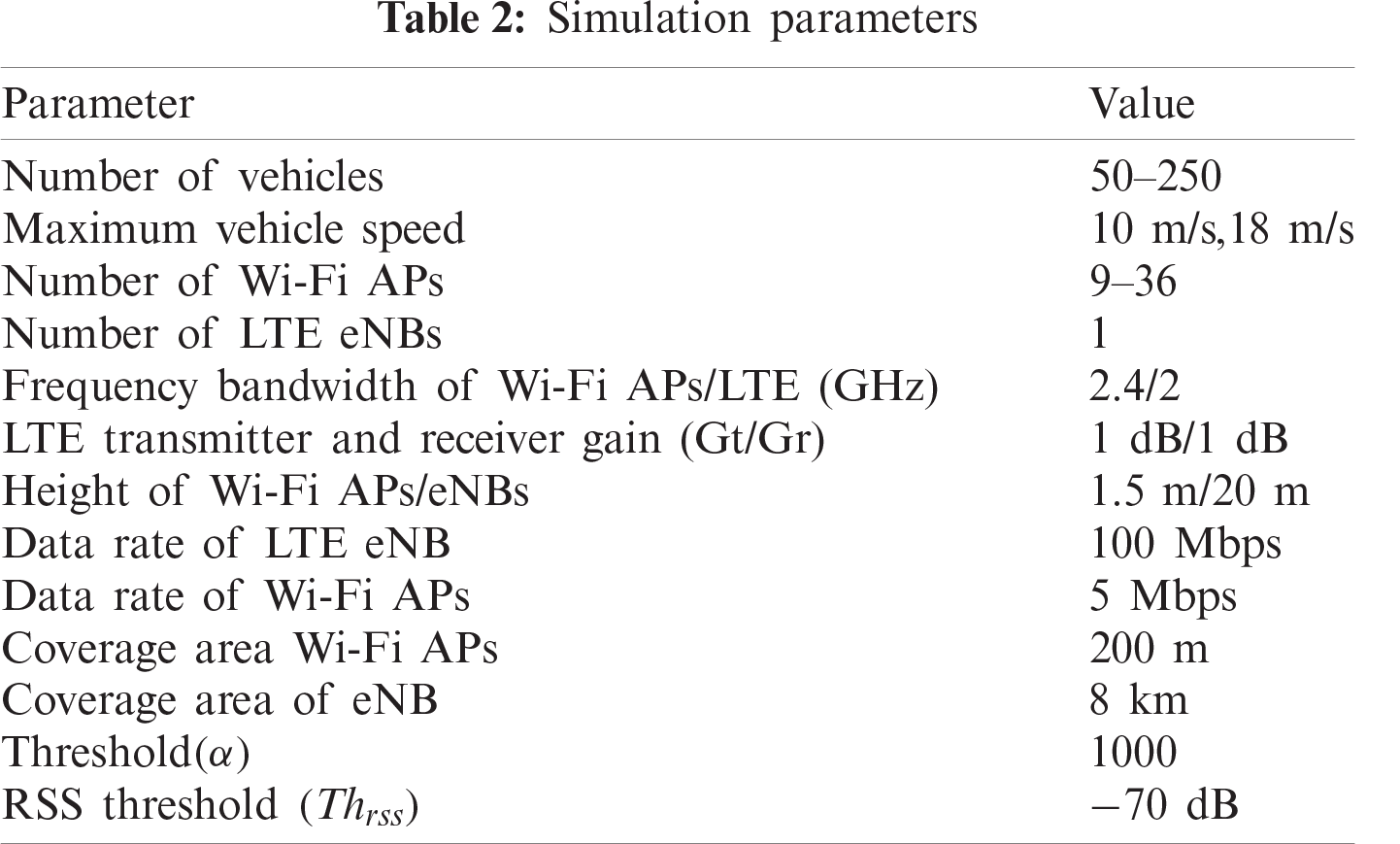
In this section, a simulation is carried out to measure the performance of the MWAP mechanism and benchmark it with the mechanism proposed in [30] (we named it as WLANPA) and the standard offloading mechanism in [31]. Two metrics were used to evaluate the MWAP mechanism and to act as a benchmark with the WLNAPA and standard mechanism, such metrics are prediction error (PE) and offloading ratio (RE). The WLANPA used the currently contacted AP and vehicular trajectory to predict the next available AP. The standard algorithm always uses cellular network whenever the Wi-Fi APs are unavailable. It only offloads cellular data when the IV is inside the Wi-Fi AP coverage zone. In the standard algorithm, the IV behaves impatiently in waiting for the Wi-Fi APs’ availability. Five scenarios were set to evaluate the performance of the MWAP mechanism; we measured their impact on the OR and PE in each scenario. The simulation is performed using MATLAB software. The Manhattan Model was used to mimic the urban scenario. Two network infrastructures are deployed: the 4G LTE-A network and the Wi-Fi network. The entire simulation area is made of eight perpendicular roads, and every road measures 1 km. For the Wi-Fi communication, we adopt the path loss model proposed in [32], which is a combination of two models, namely, two-ray ground and free space path loss models. For the 4G LTE-A system, we utilized the Okumura–Hata path loss model for the urban scenario [33]. The IV may use either delay-sensitive that is Voice over IP (VoIP) or non-delay-sensitive application, file transfer protocol (FTP). The reset of parameters setting is shown in Tabs. 1 and 2.
The PE is the average error between the number of Wi-Fi APs anticipated precisely (NWC) to the total number of Wi-Fi APs encountered in the measurement (TNWE) [31]. PE can be expressed as follows:
The OR is the ratio of the sum of the traffic offloaded (STO) to the sum of the entire traffic generated by the IV (STG) [14]. This metric measures the effectiveness of our proposed MWAP mechanism in making successful offloading process. OR can be expressed as follows:
4.3 Impact of Delay-Tolerance Values for FTP at an IV with Speed of 18 m/s and 10 m/s
We investigated the impact of different delay-tolerance values of the IV moving at a high speed of 18 m/s and a low speed of 10 m/s. In this aspect, we measured both the OR and PE when the FTP application is used by the IV. According to Tab. 1, the delay-tolerance value of the FTP application can be more than 10 s. However, in this scenario, the delay-tolerance values varied from 20 to 120 s at an increased interval of 10 s. The OR and PE of each value were recorded. Figs. 3 and 4 show the OR and PE at a vehicle speed of 18 m/s, respectively.
In Fig. 3, the IV uses the FTP within the vehicle speed of 18 m/s; the 4G LTE-A usage in the MWAP mechanism is reduced by 90% when the delay tolerance of the application is 120 s. More data are downloaded from the predicted available Wi-Fi APs as compared with the 4G LTE-A network. On average, the OR of the MWAP mechanism is 11% and 28% higher than those of the WLANPA and standard algorithm, respectively. The significant increase in the OR exhibited by the MWAP mechanism is due to the high accuracy in predicting the next available AP and the data capacity expected from that particular predicted AP. On the other hand, the OR of the WLANPA outperforms the standard algorithm by 16% on average. The standard algorithm is impatient, as it always needs to use the cellular network whenever the Wi-Fi AP is absent. This condition makes the OR lower as compared with other offloading mechanisms, which involve prediction methods.
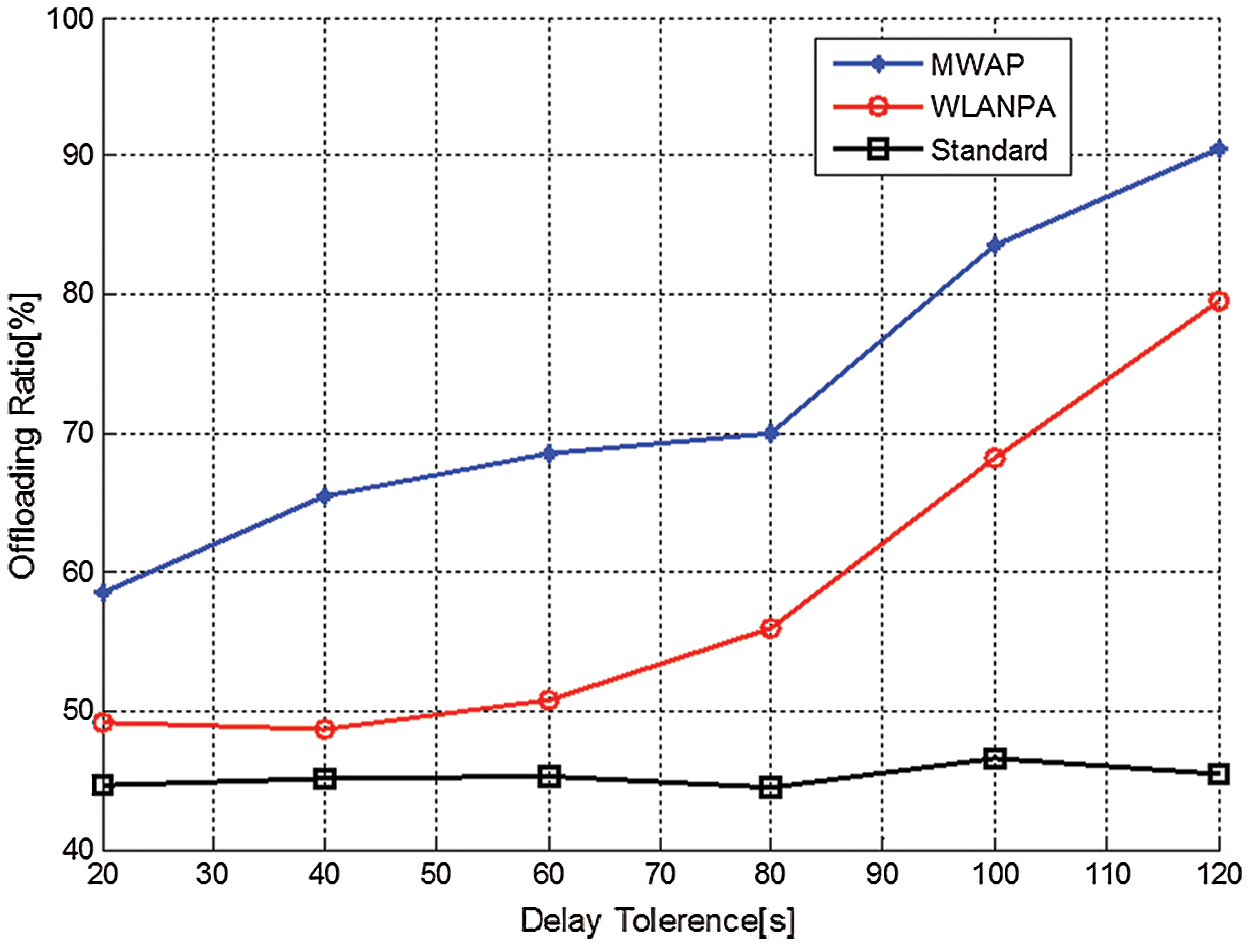
Figure 3: OR against the delay-tolerance value of the FTP at an IV speed of 18 m/s
On the other hand, Fig. 4 highlights the PE of the proposed MWAP compared with that of the WLANPA. The PE of both mechanisms decrease when the delay-tolerance value increases. This condition holds true, because when the delay-tolerance value increases, more data can be offloaded to the predicted Wi-Fi as compared with when a tight delay constraint is implemented. In the case of the MWAP, the PE is only at 7% when the delay-tolerance value is 120 s. For tight delay constraints of 20 s, the PE of the WLANPA approached 26%, which is approximately 9% higher than that of the MWAP mechanism. In all of the cases, the PE of the MWAP never exceeds above 20%, which is not the case in WLANPA.
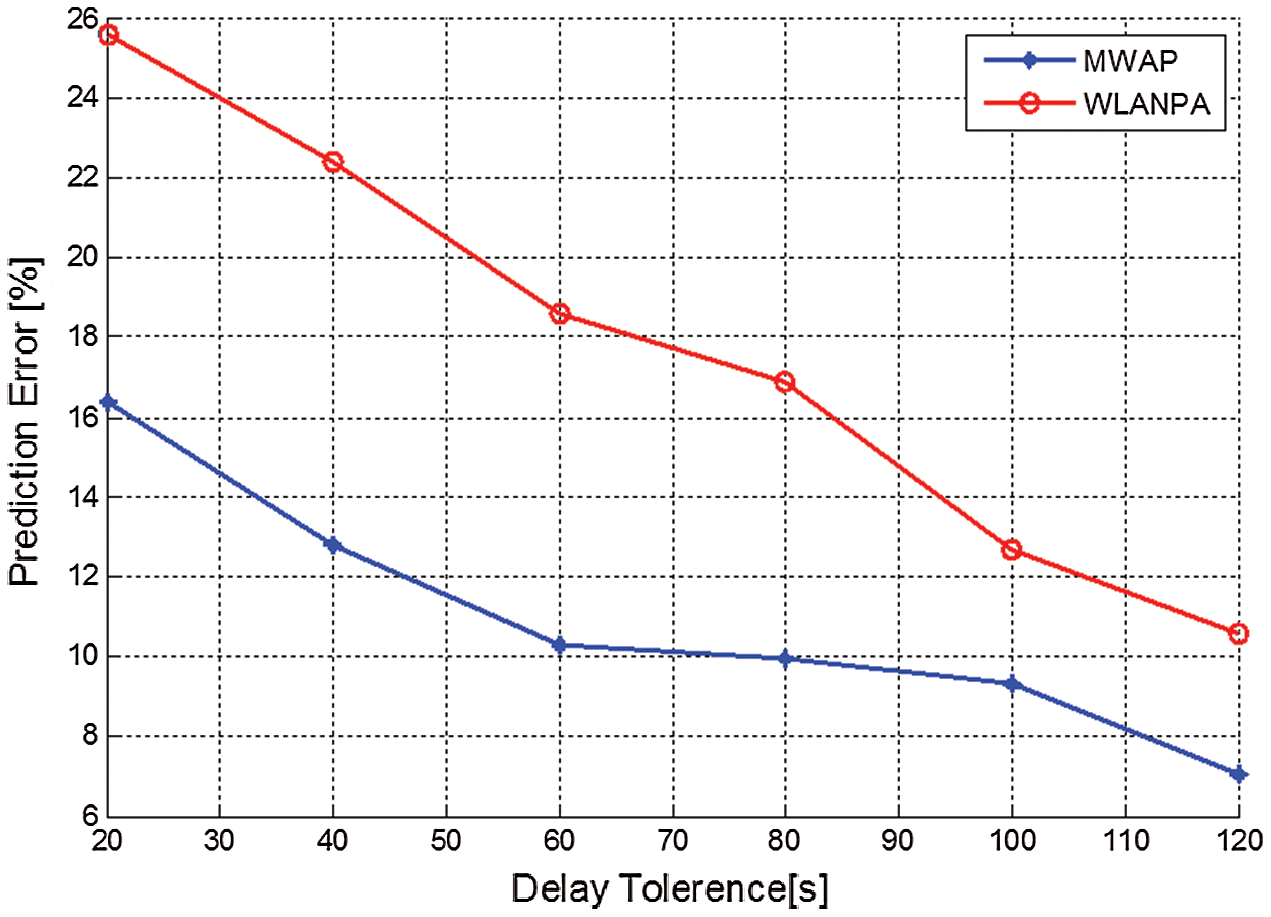
Figure 4: PE against the delay-tolerance value of the FTP at an IV speed of 18 m/s
Furthermore, we also measured the OR and PE when the FTP is used at an IV speed of 10 m/s at various delay-tolerance values. For each value, the OR and PE are recorded. Figs. 5 and 6 show the OR and PE in the case where the FTP application is used at an IV speed of 10 m/s, respectively.
In Fig. 5, the OR of the MWAP mechanism dropped by 7% as compared with when the speed of the vehicles were at 18 m/s (Fig. 3). Nevertheless, the WLANPA algorithm also shows a significant drop in the low vehicular speed (dropped by 10%) as compared with the high vehicular speed. When the vehicle moves at a high speed of 18 m/s, it takes a short time to reach the predicted AP, and the chance to meet the delay requirement for the specific application is increased. Fig. 5 shows that for the IV speed of 10 m/s, the OR of the MWAP mechanism is 14% and 23% more than those of the WLANPA and standard algorithm, respectively.
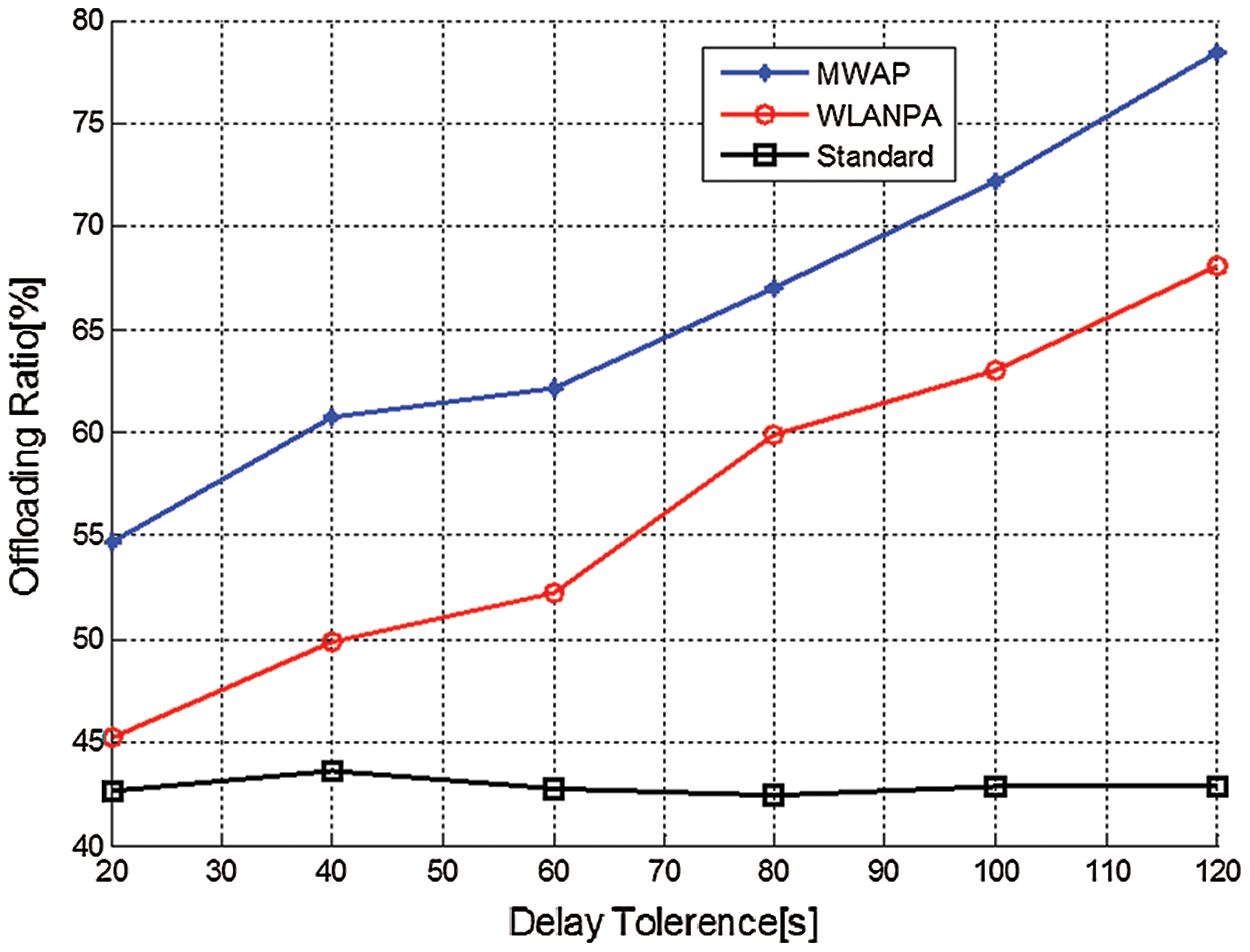
Figure 5: OR against the delay-tolerance value of the FTP at an IV speed of 10 m/s
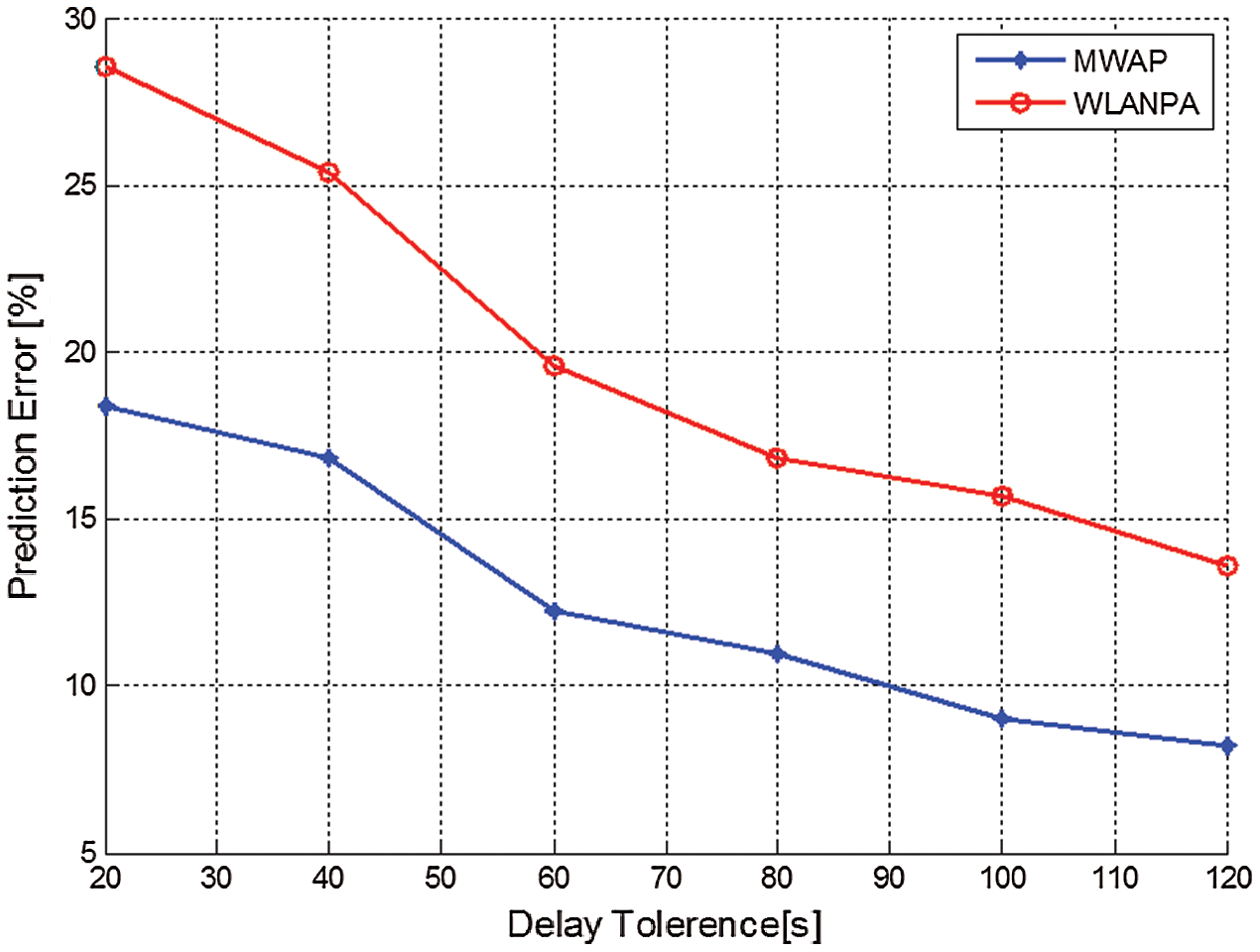
Figure 6: PE against the delay-tolerance value of the FTP at an IV speed of 10 m/s
In Fig. 6, at the speed of 10 m/s, the PE for the MWAP mechanism is 7% lower than that of the WLANPA algorithm. The MWAP mechanism managed to predict the next available Wi-Fi AP more precisely as compared with the WLANPA algorithm. The WLANPA algorithm’s PE reaches 18.4% for the lower delay-tolerance value of 20 s. However, when the maximum delay-tolerance value increased, the prediction error decreased. The reason behind this condition is that when the maximum prediction delay-tolerance value increases, the probability for the next predicted Wi-Fi AP to be chosen for offloading is high, and more offloading may occur. In the case of delay tolerance of 120 s, the PE drops to 8.2%. Furthermore, the PE of the WLANPA at a delay-tolerance value of 20 s is 28.6%, which is 10% higher than that of the MWAP mechanism. However, when the delay-tolerance value increases to 120 s, the prediction accuracy of the WLANPA improves, and the PE goes down to 13.6%.
4.4 Impact of the Delay-Tolerance Values of the VoIP at the IV Speed of 18 m/s and 10 m/s
In this scenario, we evaluate the PE and OR of the MWAP mechanism when the VoIP application is used at various delay-tolerance values. The IV speed is set to 18 m/s and 10 m/s, and the maximum delay-tolerance values ranged from 0.05 s to 0.3 s (refer to Tab. 2) at an increased interval of 0.05 s. The results are presented in Figs. 7–10.
Fig. 7 shows a slight variation on the OR among the MWAP, WLANPA, and standard algorithm when the VoIP traffic model is used at a speed of 18 m/s. For the delay-tolerance value of 0.3 s, the MWAP, WLANPA, and the standard algorithm offload 48.8%, 47.5%, and 43% of cellular data, respectively. For the small delay-tolerance value of 0.05 s, both the MWAP and WLANPA show similar OR of approximately 44%. Generally, for the VoIP, these three algorithms show comparable OR due to the delay restriction imposed by the VoIP traffic, whereby most of the time, the IV chooses to send data through the cellular network and satisfies the most stringent delay necessity for this type of application.
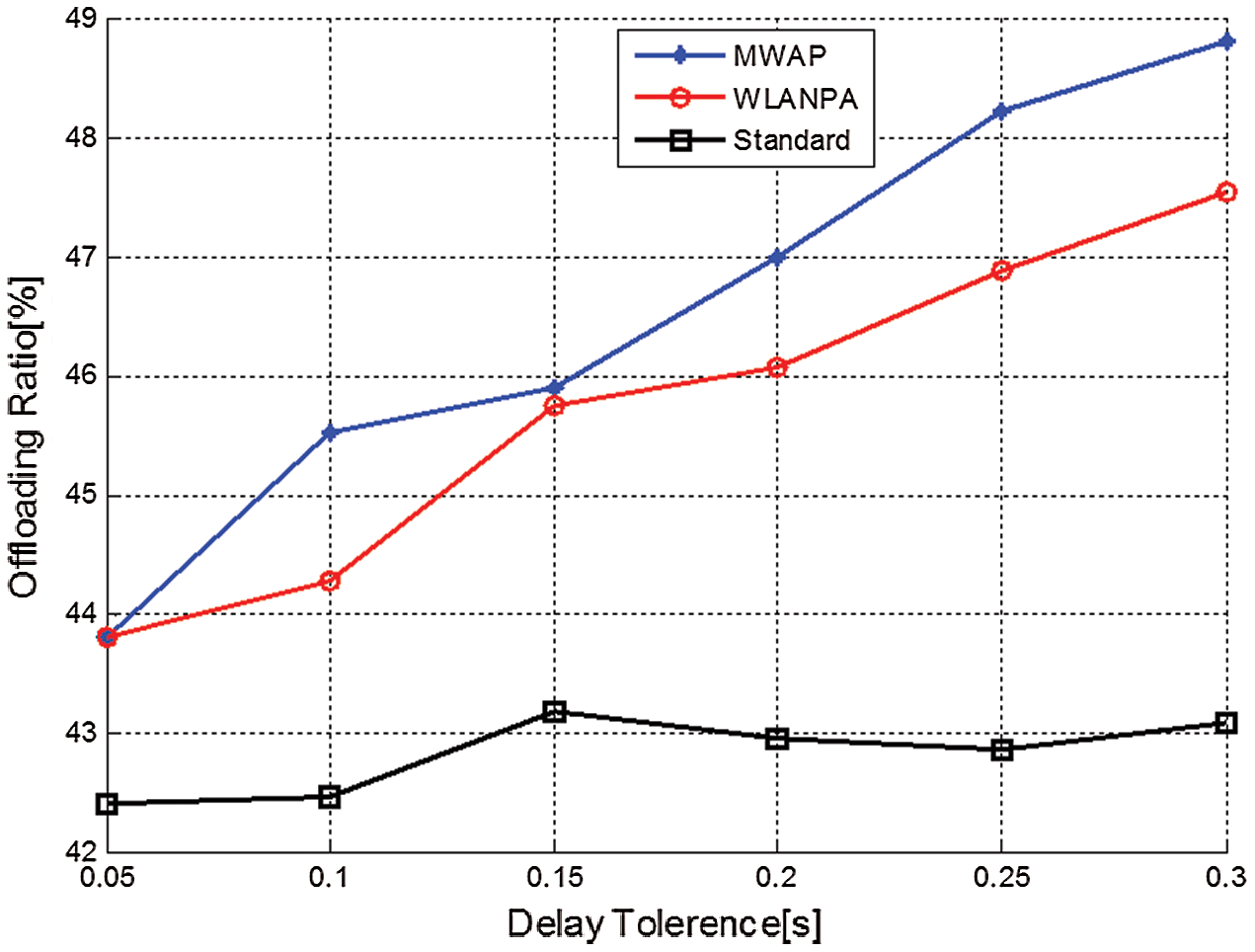
Figure 7: OR against the delay-tolerance value of the VoIP at an IV speed of 18 m/s
The results are also justified by the percentage of PE occurring between the MWAP and WLANPA. Fig. 8 reveals that for VoIP, the PE decreased when the maximum delay-tolerance value increased. This finding indicates that even though the VoIP has tight delay constraints, most of the time, the MWAP correctly predicts the next Wi-Fi AP; however, because of the delay constraints, offloading fails to occur, and the data is transferred directly to the cellular network. For delay constraints of 0.05 s, the WLANPA reached 30% PE, which is 12% higher as compared with that of the MWAP. On average, the PE for the WLANPA is 9% higher than that of the MWAP mechanism. Note that the MWAP mechanism uses both the first- and second-order Markov predictors, which increases the accuracy of the prediction mechanism.
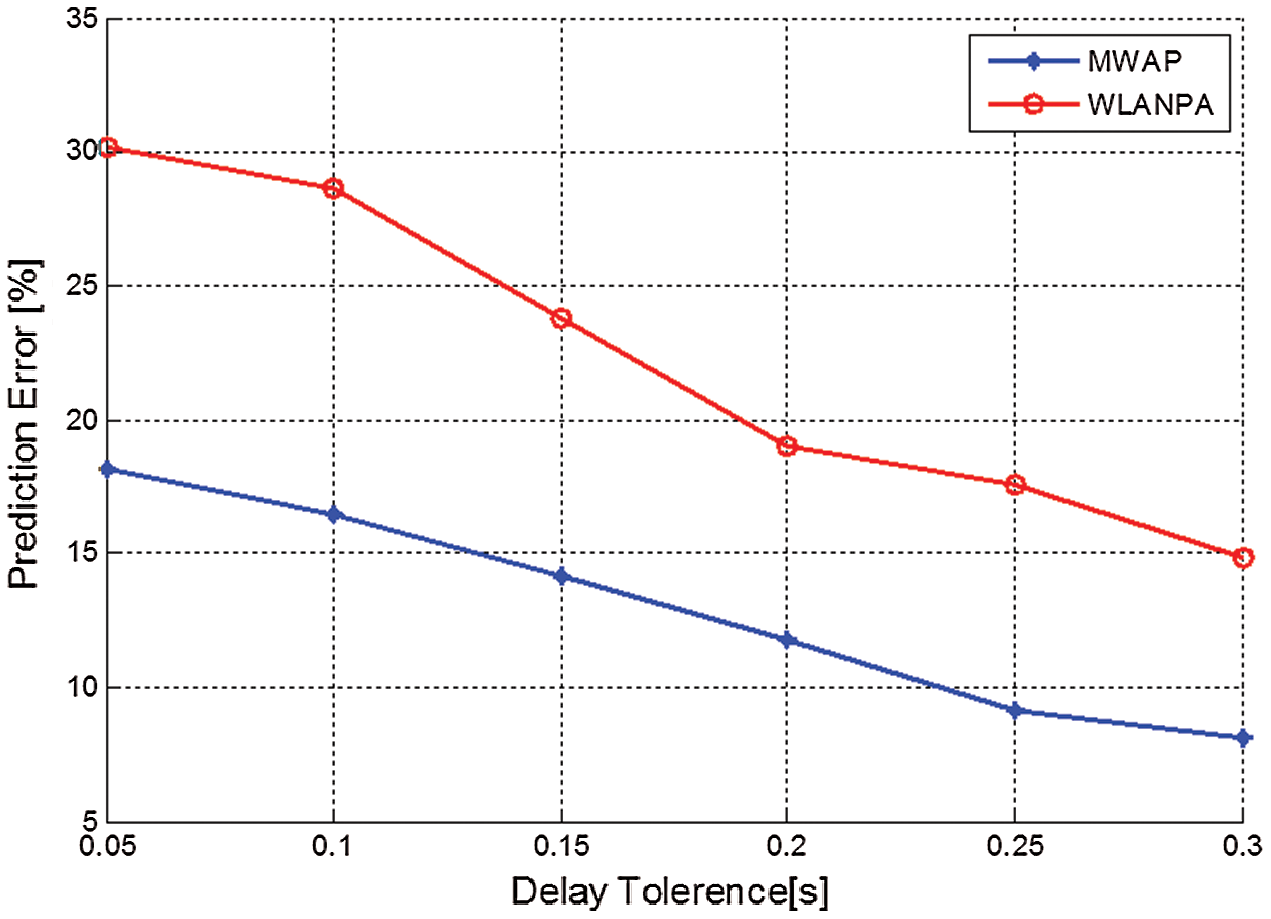
Figure 8: PE against the delay-tolerance value of the VoIP at an IV speed of 18 m/s
We also measured the OR and PE of the VoIP application when the IV speed is at 10 m/s. The results are presented in Figs. 9 and 10. Fig. 9 shows that for a low vehicle speed of 10 m/s, no significant difference is observed in the OR among the MWAP, WLANPA, and standard algorithm when the VoIP application is used. The OR of all of the three algorithms approached 45% when the maximum delay requirement is 0.3 s. This finding can be explained by the fact that for a low vehicle speed, all of the three algorithms opted to use a cellular network when the Wi-Fi AP is unavailable. The waiting time for the low vehicular speed tends to be higher than the maximum delay requirement. Thus, the MWAP, WLANPA, and standard algorithm behave similarly at a low vehicular speed.
Moreover, Fig. 10 shows that the PE occurs during the simulation of this scenario. The graph reveals that the percentage of the PE decreases when the delay-tolerance value increases. For the delay-tolerance value of 0.05 s, the PE of the WLANPA algorithm reached 32%, which is 14% higher than that of the proposed MWAP. However, when the delay-tolerance value was set to 0.3 s, the accuracy of the WLANPA mechanism increased, and the prediction error dropped to approximately 15%. This value is almost a 17% drop of the PE of the WLANPA mechanism when the delay requirement is set to a lower value of 0.05 s and then set to a higher value of 0.3 s. For the MWAP mechanism, the PE when the maximum delay requirement is set to 0.05 s is 18%. However, this percentage goes down to 7% when the maximum delay tolerance is 0.30 s. On average, the PE of the MWAP mechanism is 10.2% lower than that of the WLANPA.
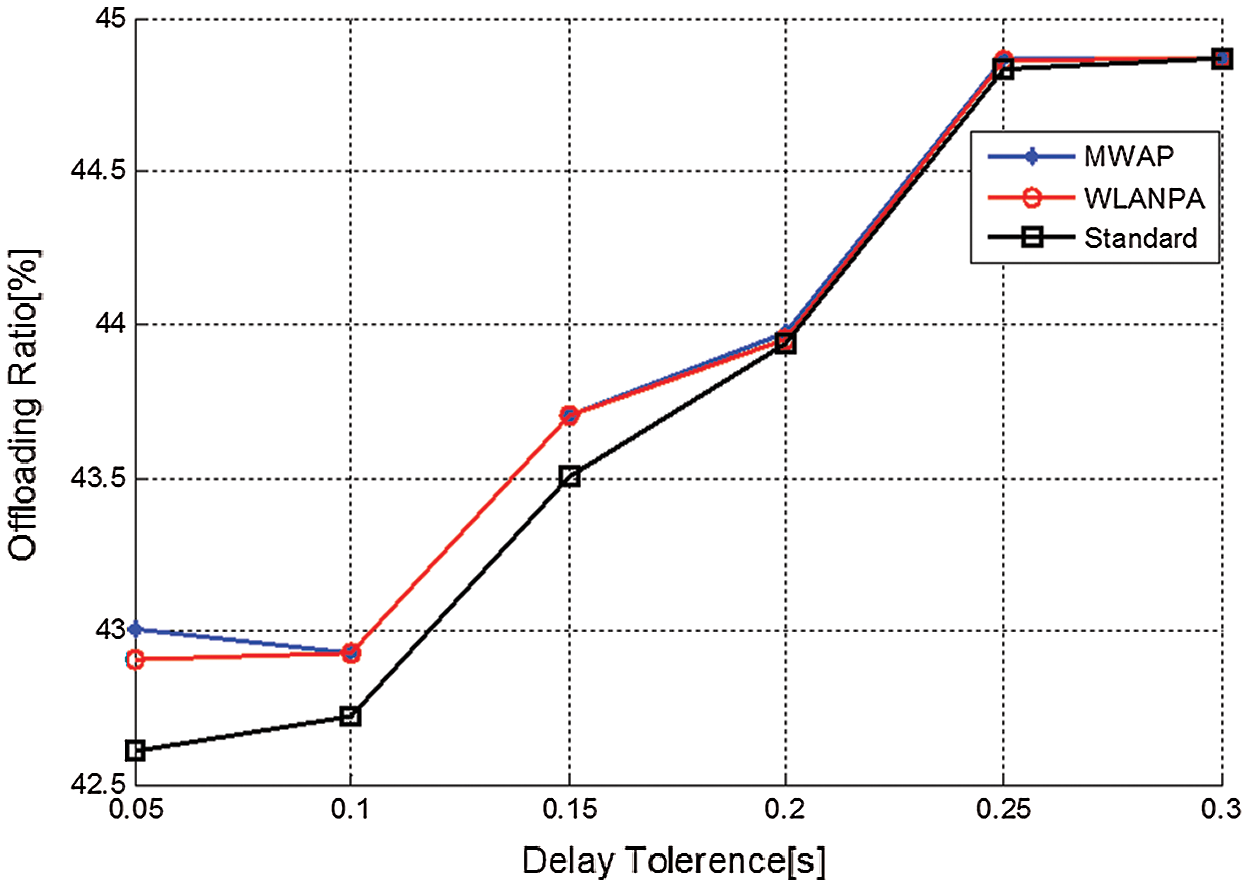
Figure 9: OR against the delay-tolerance value of the VoIP at an IV speed of 10 m/s
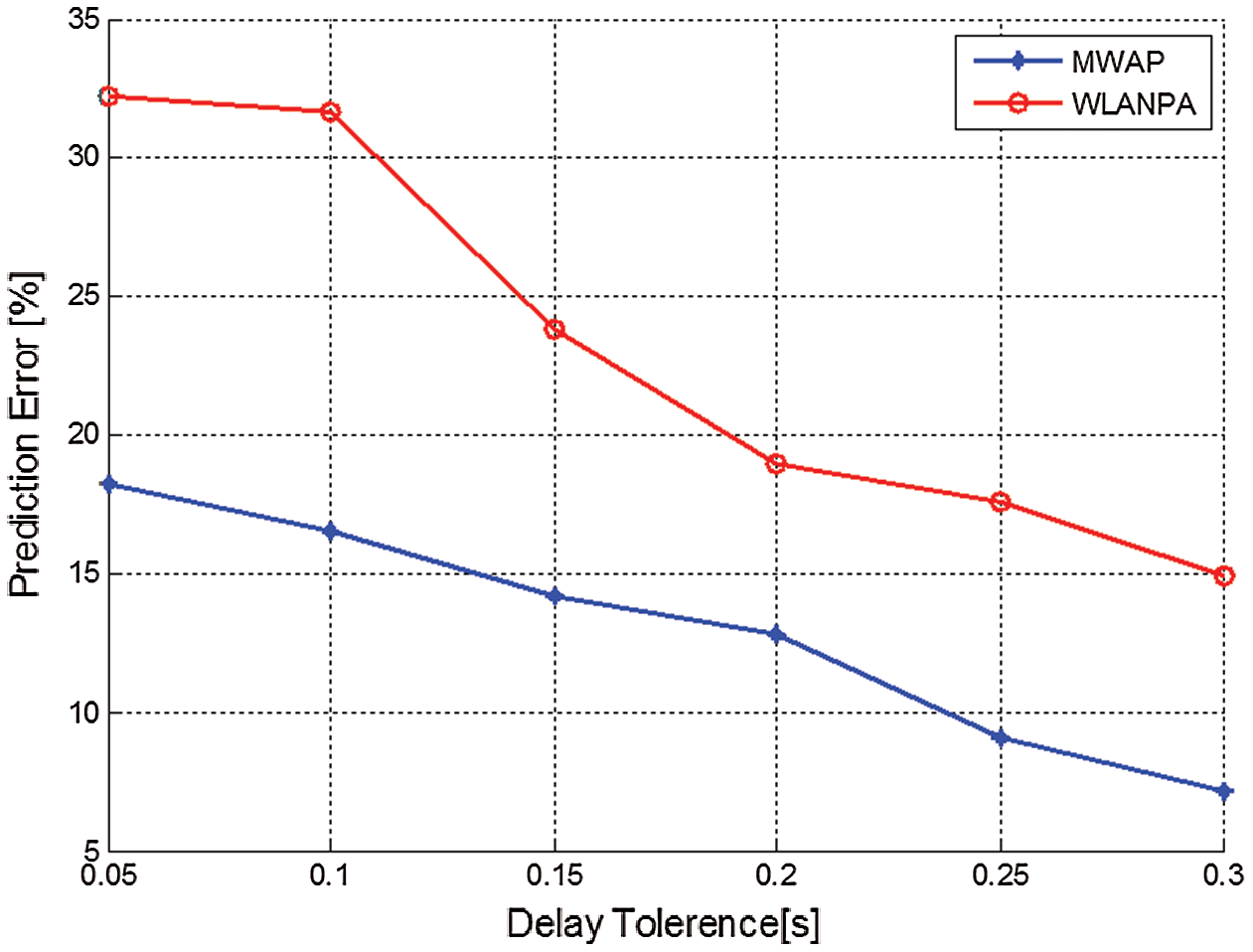
Figure 10: PE against the delay-tolerance value of the VoIP at an IV speed of 10 m/s
4.5 Impact of Increasing the Number of Wi-Fi APs
In this scenario, we investigate the impact of the Wi-Fi AP density on both the OR and PE. The number of Wi-Fi APs varies from 9 to 36 APs. For large number of Wi-Fi APs, Fig. 11 highlights the increase of OR for all of the three implemented algorithms (i.e., MWAP, WLANPA, standard). Evidently, when the number of Wi-Fi AP is high, the MWAP mechanism reduces the cellular network usage by more than 90% when the FTP application is used with the delay-tolerance value of 120 s. However, for small numbers of Wi-Fi APs, the MWAP mechanism exhibits 62% OR. The figure reveals that even though the difference of the number of APs varied from 9 (lower) to 36 (higher), the corresponding OR exhibited with MWAP is higher. Moreover, the MWAP mechanism outperformed other benchmarked algorithms by approximately 6% in the case of the WLANPA and 27% for the standard algorithm.
Furthermore, Fig. 12 shows that the PE for MWAP and WLANPA algorithm increased as the number of Wi-Fi APs increased. When the number of Wi-Fi APs is 36, the PE of the WLANPA mechanism is approximately 13% higher than that of the MWAP. We have noted the increase of PE in the WLANPA of 12% from lower to higher numbers of APs. When the number of Wi-Fi APs increases, the use of only the first-order Markov predictor does not strongly predict the next Wi-Fi AP availability, because when the number of Wi-Fi APs increases, the number of connection patterns also increases, and many possible future Wi-Fi APs are available. Both the first- and second-order Markov predictors are needed to optimize the accuracy and reduce the percentage of the PE. Generally, the MWAP mechanism has 8% lower PE than that of the WLANPA.
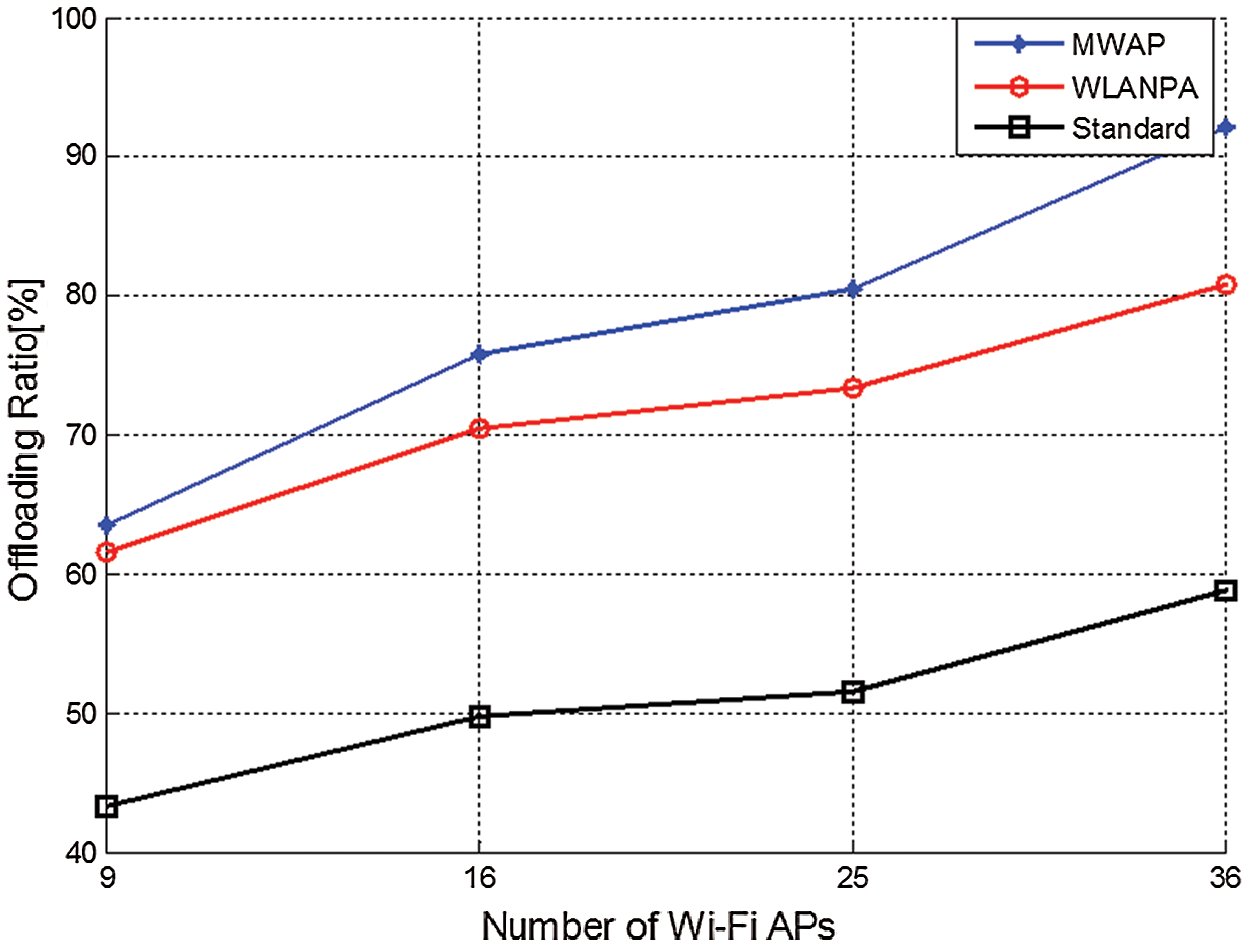
Figure 11: OR against the number of Wi-Fi APs
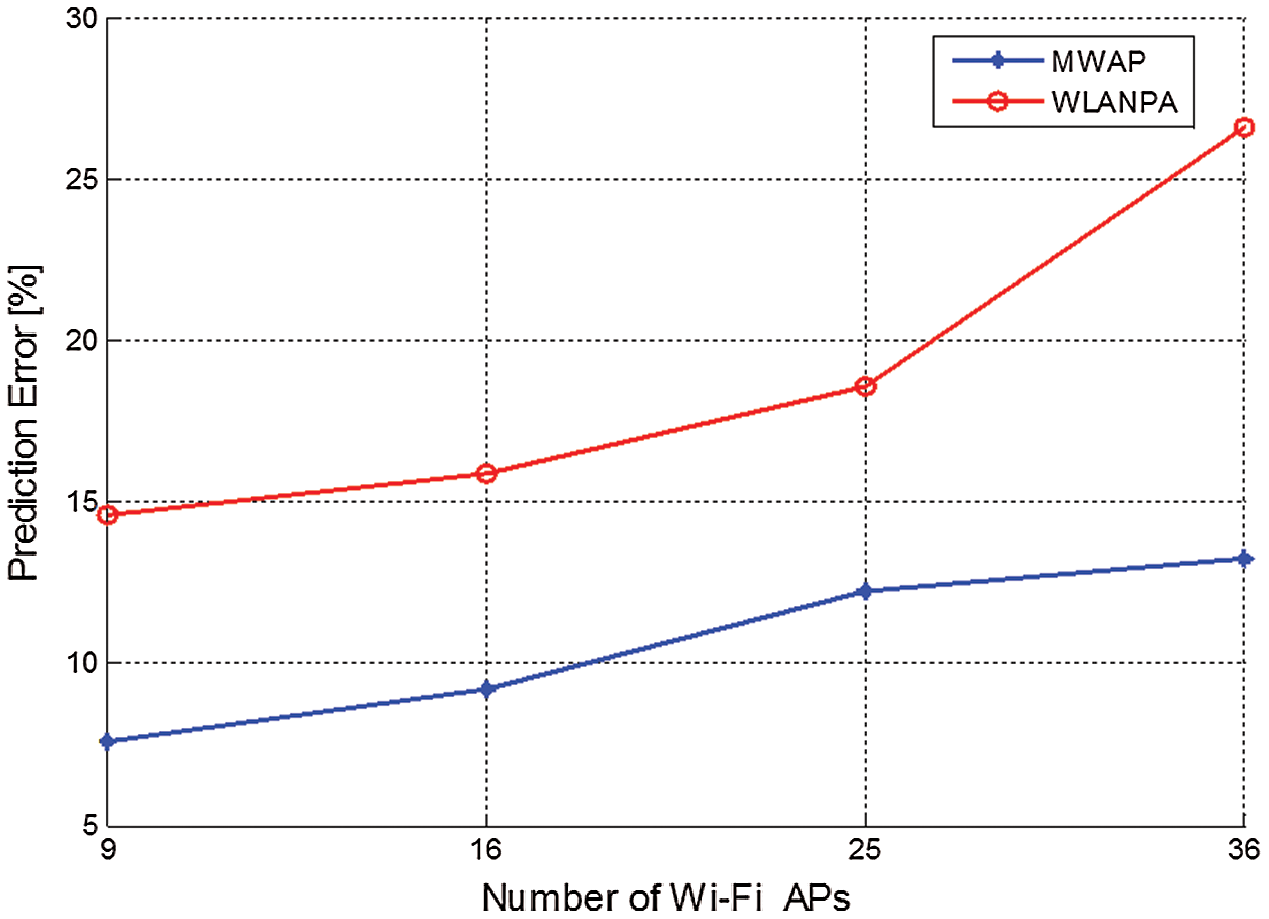
Figure 12: PE against the number of Wi-Fi APs
4.6 Impact of Increasing the IV Speed
In this scenario, we evaluate the OR and PE of the proposed MWAP mechanism at different vehicle speeds. The IV speed varies from 10 m/s to 18 m/s at the interval of 2 m/s. The application used in this scenario is FTP, and the number of vehicles was set to 50. Figs. 13 and 14 demonstrate the results.
In Fig. 13, the OR of MWAP and WLANPA increased as the vehicle speed increased. This finding can be explained by the fact that both algorithms depend on the time the IV is expected to reach the next Wi-Fi AP. If the time is shorter than the maximum delay requirement of the application, the IV will wait for the next encountered Wi-Fi AP to offload cellular data. However, for the standard algorithm, time is not a factor for offloading decision, which is the reason why the OR exhibited by the standard algorithm was nearly consistent for varying vehicle speed. Moreover, the OR exhibited by the MWAP at a speed of 10 m/s is 78%, but it increased to 91% when the IV speed reached 18 m/s. In addition, the OR of the MWAP mechanism outperforms the WLANPA and standard algorithm in both cases, for lower and higher vehicle speed. For WLANPA, the OR at 10 m/s is 68%, but the higher vehicle speed reaches 80%. Generally, the OR of the MWAP mechanism is significantly higher by 11% and 43% as compared with those of the WLANPA and standard algorithm, respectively.
Fig. 14 shows the comparison of the PE of MWAP and WLANPA. When the IV speed increases, the PE decreases, because when the IV moves at a high speed, the possibility to beat the delay requirement is higher, and the chance of the predicted Wi-Fi AP to be chosen increases. The MWAP mechanism shows lower PE than that of the WLANPA mechanism. The PE for WLANPA is approximately 4% higher than that of the MWAP mechanism. At a lower speed, the MWAP mechanism exhibits 8% PE, which is 5% lower than the PE of the WLANPA. Moreover, at a higher speed vehicle, the PE of MWAP drops to approximately 7%, which is 3% lower compared with its counterpart mechanism.
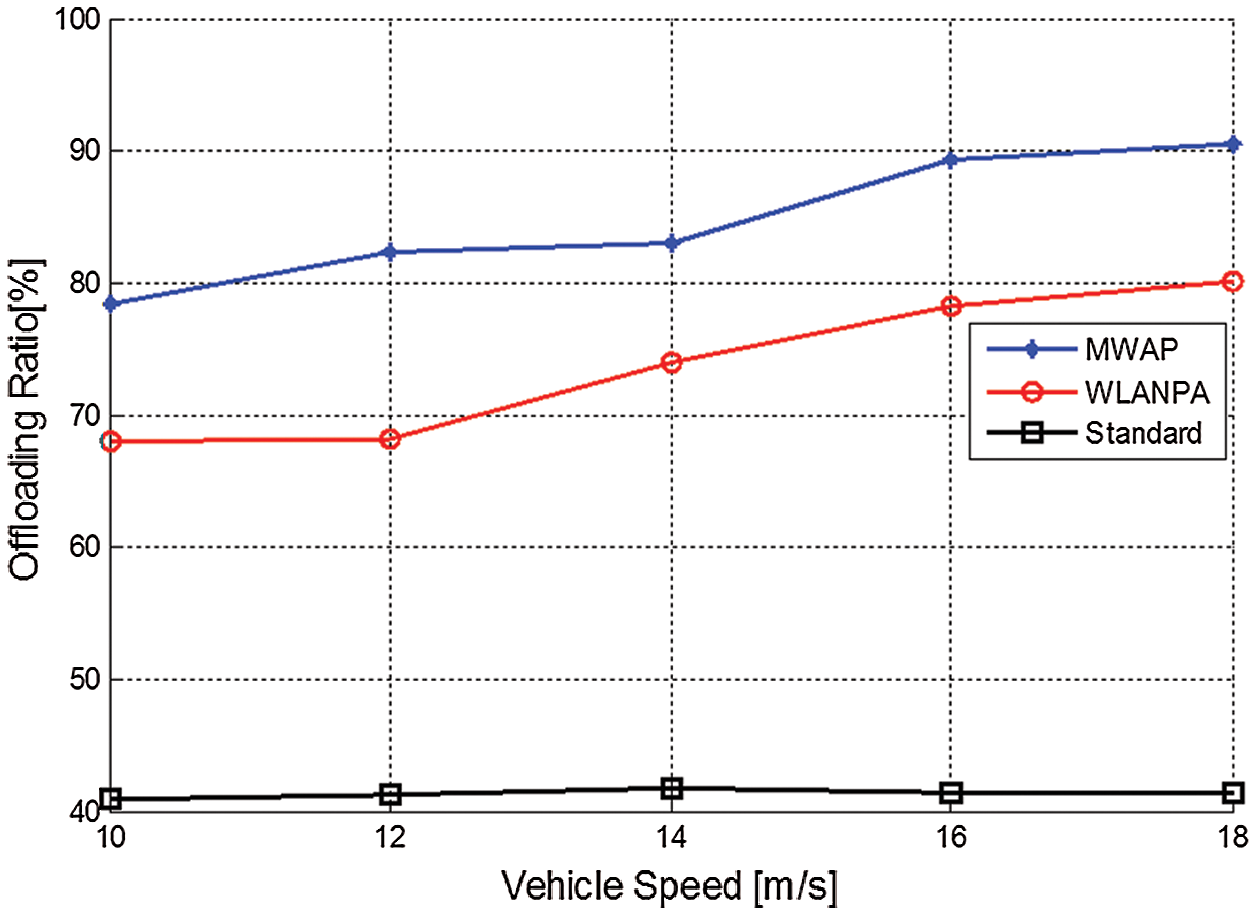
Figure 13: OR against the IV speed
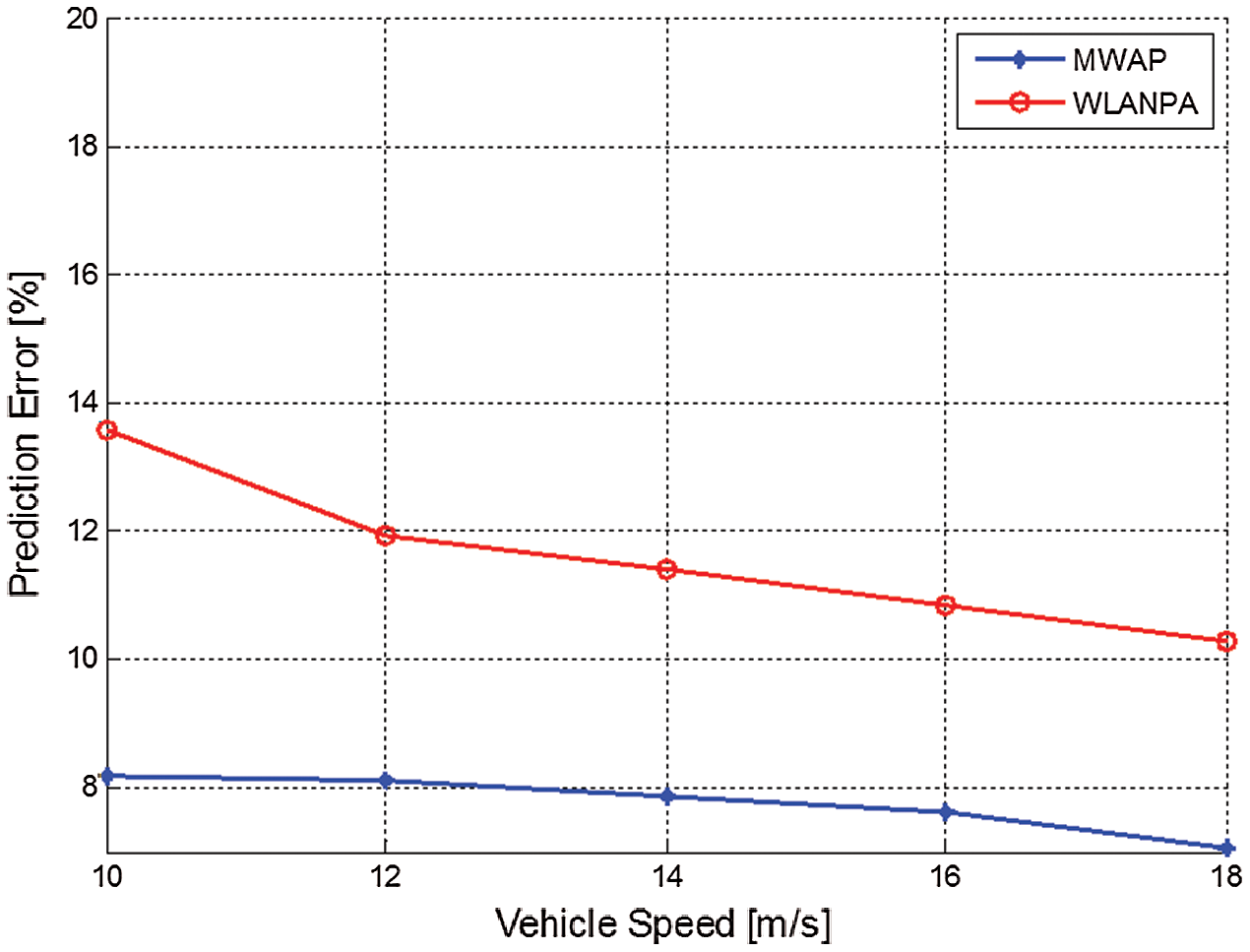
Figure 14: PE against the IV speed
4.7 Impact of Increasing the Number of Vehicles
In this part, we evaluate the OR and PE of the proposed MWAP mechanism when the number of vehicles varies from 50 to 250 vehicles at an interval of 50 vehicles at each simulation. The application used in this part is FTP with the delay-tolerance value set to 120 s. Figs. 15 and 16 highlight the results.
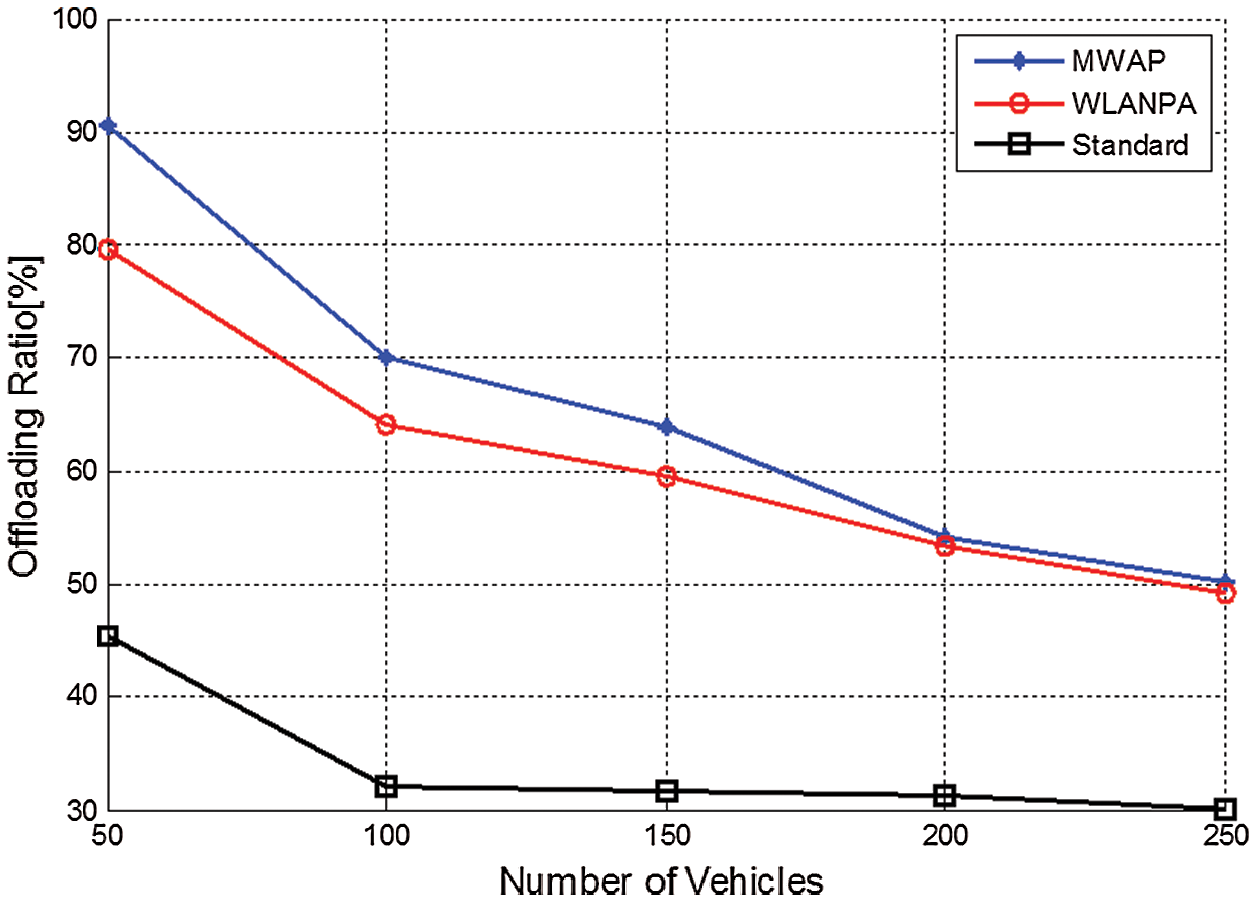
Figure 15: OR against the number of vehicles
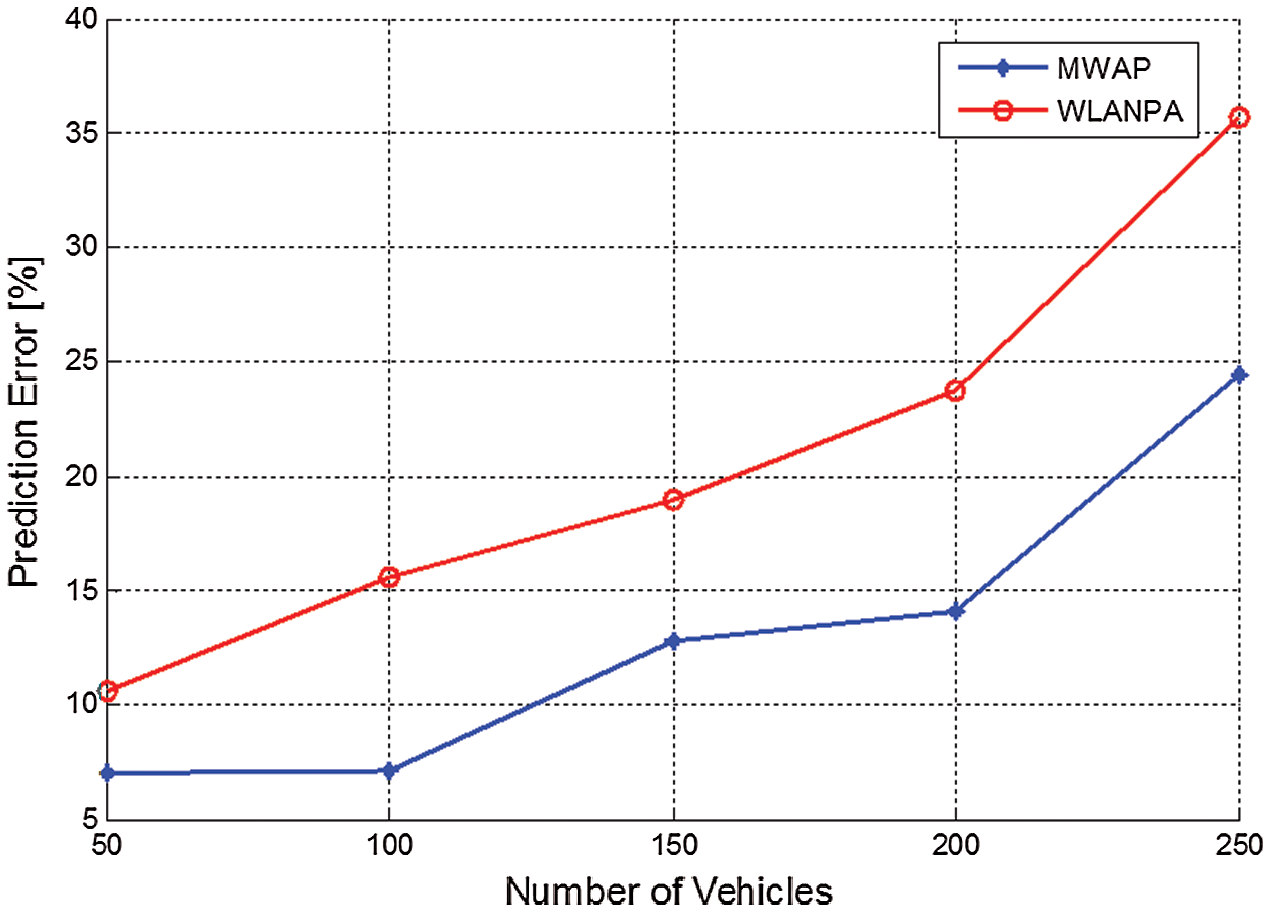
Figure 16: PE against the number of vehicles
According to Fig. 15, the OR of the MWAP mechanism goes down when the number of vehicles increases. This finding is due to the fact that when the number of vehicles increases, the possibility of increase in congested Wi-Fi APs is high. This condition affects the capability of the Wi-Fi APs to handle a large number of vehicles. Therefore, the IV decides not to offload but also connects directly to the cellular network. However, when the number of vehicles is 50, the MWAP mechanism managed to offload 90% of the cellular data. This value is 11% and 45% higher than those of the WLANPA and standard algorithm, respectively. However, when the number of vehicles increases to 250, only 50% of the cellular are offloaded through Wi-Fi APs using the proposed MWAP mechanism. For the number of vehicles of more than 200 vehicles, the MWAP and WLANPA algorithm show insignificant difference on OR, both algorithms exhibit similar OR. However, for the standard algorithm, the OR drops to 30%. Generally, the OR of MWAP is 5% and 32% higher than those of the WLANPA and standard algorithm, respectively.
On the other hand, in the same scenario, the WLANPA exhibits a higher value of PE as compared with the rest of the tested scenarios (refer to Fig. 16). More than 35% of PE is exhibited when the number of vehicles reaches 250. Both the PE of MWAP and WLANPA increase when the number of vehicles increases. However, when the number of vehicles is 50, the MWAP PE only reaches 7%, which is 3% more than the PE exhibited by WLANPA. The maximum PE exhibited by MWAP in this scenario was 24%, which occurred when the number of vehicles is 250. On average, the PE of the WLANPA is 8% higher than that of the MWAP.
Deciding whether to offload or not in VWO is critical in maintaining the QoS of different applications. The vehicle needs to have prior information on the availability of the next Wi-Fi AP and its expected capacity. This paper proposed the MWAP mechanism, which predicts the next Wi-Fi AP availability and its expected data capacity in a heterogeneous vehicular network.
The MWAP mechanism utilizes three criteria for prediction purpose. The MWAP utilizes historical connection patterns and vehicular trajectory computation to anticipate the next available Wi-Fi AP. Moreover, this mechanism uses historical data rate information to estimate the amount of data the IV would transfer within the maximum tolerable delay. This amount is then compared with the expected data capacity that the IV can acquire from the next Wi-Fi AP to decide whether to wait or connect directly to the cellular network.
The MWAP mechanism was simulated in MATLAB and benchmarked with related state-of-the-art mechanisms. The results revealed that the MWAP mechanism exhibits higher prediction accuracy and OR as compared with the related existing mechanisms. Most of the tested scenarios revealed that the PE of the MWAP mechanism does not exceed 20% as compared with other benchmarked mechanisms. The MWAP mechanism improves the prediction accuracy, because it utilized both first- and second-order Markov predictors in anticipation of the next Wi-Fi AP. Moreover, in several tested scenarios, the proposed MWAP mechanism managed to offload about 90% of the cellular data to Wi-Fi APs. However, findings show that Wi-Fi deployment strategies have a direct effect in maximizing the OR. When a large number of Wi-Fi APs is deployed, the OR significantly increases, and more data are sent through Wi-Fi than through cellular network. Nevertheless, findings also show that the delay-tolerance value affects the OR. If the application can tolerate delay, it becomes the best candidate to offload as compared with the application that imposes stringent delay constraints. In addition, the FTP application was exhibited higher OR as compared with the VoIP application. Generally, the OR for the VoIP application for all of the test mechanisms behave similarly, due to the delay constraints imposed by delay-sensitive applications, which affect the offloading decision.
In our future work, we want to investigate the offloading mechanism through multi-hop mechanism in vehicle-to-vehicle communication paradigm in offloading the cellular data especially in a highway environment where the number of Wi-Fi APs is expected to be limited as compared with the urban environment.
Funding Statement: This research was funded by the Deanship of Scientific Research at Princess Nourah bint Abdulrahman University through the Fast-track Research Funding Program.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Cisco, “Cisco visual networking index: Global mobile data traffic forecast update, 2014–2019,” Visual Networking Index, vol. 2019, pp. 1–33, 2015. [Google Scholar]
2. A. Aijaz, H. Aghvami and M. Amani, “A survey on mobile data offloading: Technical and business perspectives,” Wireless Communications, IEEE, vol. 20, no. 2, pp. 104–112, 2013. [Google Scholar]
3. S. Dimatteo, H. Pan, H. Bo and V. O. K. Li, “Cellular traffic offloading through WiFi networks,” in 2011 IEEE 8th Int. Conf. on Mobile Adhoc and Sensor Systems (MASSValencia, Spain, pp. 192–201, 2011. [Google Scholar]
4. I. F. Mobility, “Seamless wireless local area network (WLAN) offload,” Stage, vol. 2, pp. V10, 2012. [Google Scholar]
5. G. El Mouna Zhioua, H. Labiod, N. Tabbane and S. Tabbane, “VANET inherent capacity for offloading wireless cellular infrastructure: an analytical study,” in 2014 6th Int. Conf. on New Technologies, Mobility and Security (NTMSDubai, United Arab Emirates, pp. 1–5, 2014. [Google Scholar]
6. P. Salvo, I. Turcanu, F. Cuomo, A. Baiocchi and I. Rubin, “Heterogeneous cellular and DSRC networking for floating car data collection in urban areas,” Vehicular Communications, vol. 8, no. Suppl. C, pp. 21–34, 2017. [Google Scholar]
7. R. Hussain, J. Lee and S. Zeadally, “Trust in VANET: A survey of current solutions and future research opportunities,” IEEE Transactions on Intelligent Transportation Systems, vol. 2020, pp. 1–19, 2020. [Google Scholar]
8. M. Gramaglia, C. Bernardos and M. Calderon, “Seamless Internet 3G and opportunistic WLAN vehicular connectivity,” EURASIP Journal on Wireless Communications and Networking, vol. 2011, no. 1, pp. 183, 2011. [Google Scholar]
9. N. Cheng and X. Shen, “Performance analysis of wifi offloading in vehicular environments,” in Opportunistic Spectrum Utilization in Vehicular Communication Networks. Basel, Switzerland: Springer International Publishing, pp. 57–69, 2016. [Google Scholar]
10. W. Ishtiaq, U. Fasee, A. Masood, K. Atif, U. Irfan et al., “Quality of service aware cluster routing in vehicular ad hoc networks,” Computers, Materials & Continua, vol. 67, no. 3, pp. 3949–3965, 2021. [Google Scholar]
11. F. Malandrino, C. Casetti, C.-F. Chiasserini and M. Fiore, “Offloading cellular networks through ITS content download,” in 2012 9th Annual IEEE Communications Society Conf. on Sensor, Mesh and Ad Hoc Communications and Networks (SECONSeoul, Korea (Southpp. 263–271, 2012. [Google Scholar]
12. T. Wang, P. Li, X. Wang, Y. Wang, T. Guo et al., “A comprehensive survey on mobile data offloading in heterogeneous network,” Wireless Networks, vol. 25, no. 2, pp. 573–584, 2019. [Google Scholar]
13. F. Rebecchi, M. D. De Amorim, V. Conan, A. Passarella, R. Bruno et al., “Data offloading techniques in cellular networks: A survey,” IEEE Communications Surveys & Tutorials, vol. 17, no. 2, pp. 580–603, 2014. [Google Scholar]
14. S. Wang, T. Lei, L. Zhang, C.-H. Hsu and F. Yang, “Offloading mobile data traffic for QoS-aware service provision in vehicular cyber-physical systems,” Future Generation Computer Systems, vol. 61, pp. 118–127, 2016. [Google Scholar]
15. T. ETSI, “Intelligent transport systems (its); vehicular communications; basic set of applications; part 2: Specification of cooperative awareness basic service,” Draft ETSI TS, vol. 20, pp. 448–451, 2011. [Google Scholar]
16. B. Mohammed and D. Naouel, “An efficient greedy traffic aware routing scheme for Internet of vehicles,” Computers, Materials & Continua, vol. 60, no. 3, pp. 959–972, 2019. [Google Scholar]
17. J. Ott and D. Kutscher, “Drive-thru internet: IEEE 802.11 b for “automobile” users,” in IEEE INFOCOM 2004, Hong Kong, China, pp. 373, 2004. [Google Scholar]
18. P. S. Prasad and P. Agrawal, “Movement prediction in wireless networks using mobility traces,” in 7th IEEE Consumer Communications and Networking Conf., Las Vegas, NV, USA, pp. 1–5, 2010. [Google Scholar]
19. D. Ashbrook and T. Starner, “Learning significant locations and predicting user movement with GPS,” in Proc. Sixth Int. Symp. on Wearable Computers, Seattle, WA, USA, pp. 101–108, 2002. [Google Scholar]
20. S. Gambs, M.-O. Killijian and M. N. del Prado Cortez, “Next place prediction using mobility markov chains,” in Proc. of the First Workshop on Measurement, Privacy, and Mobility, Bern Switzerland, pp. 1–6, 2012. [Google Scholar]
21. A. J. Nicholson and B. D. Noble, “Breadcrumbs: Forecasting mobile connectivity,” in Proc. of the 14th ACM Int. Conf. on Mobile Computing and Networking, San Francisco, CA, USA, pp. 46–57, 2008. [Google Scholar]
22. D. Zhang and C. K. Yeo, “Enabling efficient wifi-based vehicular content distribution,” IEEE Transactions on Parallel and Distributed Systems, vol. 24, no. 3, pp. 479–492, 2012. [Google Scholar]
23. M. Almulla, Y. Wang, A. Boukerche and Z. Zhang, “Design of a fast location-based handoff scheme for IEEE 802.11 vehicular networks,” IEEE Transactions on Vehicular Technology, vol. 63, no. 8, pp. 3853–3866, 2014. [Google Scholar]
24. J.-M. François and G. Leduc, “Ap and mn-centric mobility prediction: A comparative study based on wireless traces,” in Int. Conf. on Research in Networking, Valencia, Spain, pp. 322–332, 2007. [Google Scholar]
25. S. Lee and S. Lee, “User-centric offloading to WLAN in WLAN/3G vehicular networks,” Wireless Personal Communications, vol. 70, no. 4, pp. 1925–1940, 2013. [Google Scholar]
26. G. Xiao, H. Zhang, H. Hassan, Y. Chen, Z. Huang et al., “A cooperative offloading game on data recovery for reliable broadcast in VANET,” Concurrency and Computation: Practice and Experience, vol. 29, no. 14, pp. e3938, 2017. [Google Scholar]
27. X. Chen, “Decentralized computation offloading game for mobile cloud computing,” IEEE Transactions on Parallel and Distributed Systems, vol. 26, no. 4, pp. 974–983, 2014. [Google Scholar]
28. A. Balasubramanian, R. Mahajan and A. Venkataramani, “Augmenting mobile 3G using WiFi,” in Proc. of the 8th Int. Conf. on Mobile Systems, Applications, and Services, San Francisco, CA, USA, pp. 209–222, 2010. [Google Scholar]
29. N. Wang and J. Wu, “Opportunistic WiFi offloading in a vehicular environment: Waiting or downloading now?,” in IEEE INFOCOM 2016-The 35th Annual IEEE Int. Conf. on Computer Communications, San Francisco, CA, USA, pp. 1–9, 2016. [Google Scholar]
30. S. Lee and S. Lee, “User-centric offloading to WLAN in WLAN/3G vehicular networks,” Wireless Personal Communications, vol. 70, no. 4, pp. 1925–1940, 2012. [Google Scholar]
31. A. Balasubramanian, R. Mahajan and A. Venkataramani, “Augmenting mobile 3G using WiFi,” in Proc. of the 8th Int. Conf. on Mobile Systems, Applications, and Services, San Francisco, California, USA, pp. 209–222, 2010. [Google Scholar]
32. C. Sommer, S. Joerer and F. Dressler, “On the applicability of Two-Ray path loss models for vehicular network simulation,” in 2012 IEEE Vehicular Networking Conf., Seoul, Korea (Southpp. 64–69, 2012. [Google Scholar]
33. J. S. Seybold, Introduction to RF Propagation. Hoboken, New Jersey, USA: John Wiley & Sons, 2005. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |