DOI:10.32604/cmc.2021.015858
| Computers, Materials & Continua DOI:10.32604/cmc.2021.015858 | |
| Article |
Intelligent Approach for Traffic Orchestration in SDVN Based on CMPR
1Department of E-Commerce, College of Administrative and Financial Sciences, Saudi Electronic University, Saudi Arabia
2Department of Computer Science, Community College, King Saud University, Saudi Arabia
*Corresponding Author: Ahmad Ali AlZubi. Email: aalzubi@ksu.edu.sa
Received: 02 December 2020; Accepted: 09 January 2021
Abstract: The vehicle ad hoc network that has emerged in recent years was originally a branch of the mobile ad hoc network. With the drafting and gradual establishment of standards such as IEEE802.11p and IEEE1609, the vehicle ad hoc network has gradually become independent of the mobile ad hoc network. The Internet of Vehicles (Vehicular Ad Hoc Network, VANET) is a vehicle-mounted network that comprises vehicles and roadside basic units. This multi-hop hybrid wireless network is based on a vehicle-mounted self-organizing network. As compared to other wireless networks, such as mobile ad hoc networks, wireless sensor networks, wireless mesh networks, etc., the Internet of Vehicles offers benefits such as a large network scale, limited network topology, and predictability of node movement. The paper elaborates on the Traffic Orchestration (TO) problems in the Software-Defined Vehicular Networks (SDVN). A succinct examination of the Software-defined networks (SDN) is provided along with the growing relevance of TO in SDVN. Considering the technology features of SDN, a modified TO method is proposed, which makes it possible to reduce time complexity in terms of a group of path creation while simultaneously reducing the time needed for path reconfiguration. A criterion for path choosing is proposed and justified, which makes it possible to optimize the load of transport network channels. Summing up, this paper justifies using multipath routing for TO.
Keywords: SDVN; traffic orchestration; vehicular networks; multipath routing
The constantly increasing number of vehicles on roads has caused the Vehicular Ad hoc Network (VANET) to emerge as a popular topic when it comes to automotive networking research. As the volume of network traffic is constantly increasing, congestion in some channels of the transport network is not unexpected. In comparison to low-speed nodes in a conventional wireless network, VANET vehicles move quickly and erratically, which results in regular alterations loads taken on by the transport network channels. The most optimal distance from one vehicle to another has to be determined with the square of the speed at which they are moving [1]. Accordingly, in the case of the vehicle placement density increase on the roads, the speed of node movement and the throughput of highways will decrease. This raises the question of developing new or making improvements in existing methods of Traffic Orchestration, which make it possible to respond rapidly to the changes in the state of the transport network and ensure the most equal load of channels.
With the development of mobile communication technology, researchers have developed many in-vehicle safety and non-safety applications, such as collaborative collision avoidance, route planning, autonomous driving, etc., but the in-vehicle network still faces many challenges due to the difficulties in infrastructure deployment and management. For example, the number of connected devices is increasing exponentially, the efficiency of resource utilization is low, and the traffic flow is uneven. Other challenges include difficulties in geographical addressing, high mobility of vehicles and unreliable connections, etc. The traditional vehicle network architecture uses special algorithms in-vehicle components to monitor traffic density and plan routing paths to achieve effective message transmission. However, the frequent interruption of vehicle communication, heterogeneous network interfaces, and the growing demand for scalability, flexibility, safety and reliability of the vehicle network has gradually revealed the drawbacks of a traditional vehicle network. Also, the private ownership and tight coupling of hardware devices hinder the innovation and development of computer networks. With an increase in the number of network devices and the acceleration of network data transmission, traditional IP-based networks are becoming increasingly difficult in deployment and management, and they can no longer meet the development needs of future networks [2]. At the same time, the introduction of new services has also created huge challenges for the construction, maintenance, and upgrade of the network, resulting in increased operating costs, short equipment life cycles, and increasingly complex networks. SDN points out the direction for solving the above problems. SDN represents an emerging network model with the potential to join cellular networks and vehicle-mounted networks. First, SDN separates control and forwarding functions, thus allowing researchers to directly program network control and abstract infrastructure for applications and network services. Second, logically centralized control improves resource utilization efficiency. Third, programmability makes the network more flexible, and applications would be able to select the most suitable wireless access interface to transmit data. Therefore, the design of SDVN is an effective way to deal with vehicle application requirements, manage dynamic network topologies, support network heterogeneity, and minimize network management costs/design complexity [3].
SDN is a routing technology that has emerged in recent years and is mainly used in wired networks to improve their network bandwidth utilization. In recent years, research on software-defined wireless networks has gradually become a hotspot. SDN can better realize the flexible allocation and control of network resources, with obvious advantages in scalability and efficiency. These technical advantages are in line with the characteristics of the vehicle network in terms of node mobility, network dynamics, and network scale. Therefore, the introduction of SDN into the Internet of Vehicles can better solve the current difficulties of the Internet of Vehicles. In particular, the centralized management and control concept of SDN based on the controller can solve the difficulty of node coordination caused by the centerless and multiple changes of the Internet of Vehicles. However, SDN is primarily used in wired networks, and its architecture considers wired links and fixed equipment, with a stable network topology. The Internet of Vehicles is based on a dynamic wireless network that comprises vehicle-to-vehicle (V2V) and vehicle-to-Roadside (V2R) unit communication, whereas topology dynamic changes are not considered by general SDN. The problem. This is the main challenge of applying SDN in the vehicle network, in addition to being the main goal of this paper. SDN can also be implemented in a dynamic topology [4].
The rest of the paper is organized as follows. Section 2 provides a brief overview of TO methods that currently exist in VANETs. The advantage of using multipath routing methods in VANET based on TO has been justified. Section 3 proposes a modified TO method in SDVN. The method for generating routing information with a minimum time for path reconfiguration and dynamic rerouting of traffic flows has been developed and presented.
In general, Network Orchestration is a system for managing and optimizing network services. Traffic Orchestration refers to the traffic engineering and management of the network traffic to provide specified Quality of Service (QoS) parameters and an equal load of network channels. Traffic Orchestration issues in SDN transport networks are connected with the increase in network size and load on its channels. Real-time traffic engineering is essential to achieve even traffic balancing, fast disaster recovery, and congestion avoidance [5]. An update of the routing information using well-known distributed routing techniques takes a significant amount of time and leads to network jams and congestions. In this case, the centralized management of the transport network is deemed most efficacious. One of the promising solutions to this challenge is the integration of VANETs with software-defined networks (SDN) through Software-Defined Vehicular Networking (SDVN). The convergence of SDN and VANET is known to solve common VANET issues, including the balance of traffic load and dynamic path reconfiguration.
A differential characteristic of SDN involved network management and organization. This takes place at the software level through virtual switches alongside a central SDN controller as shown in Fig. 1.
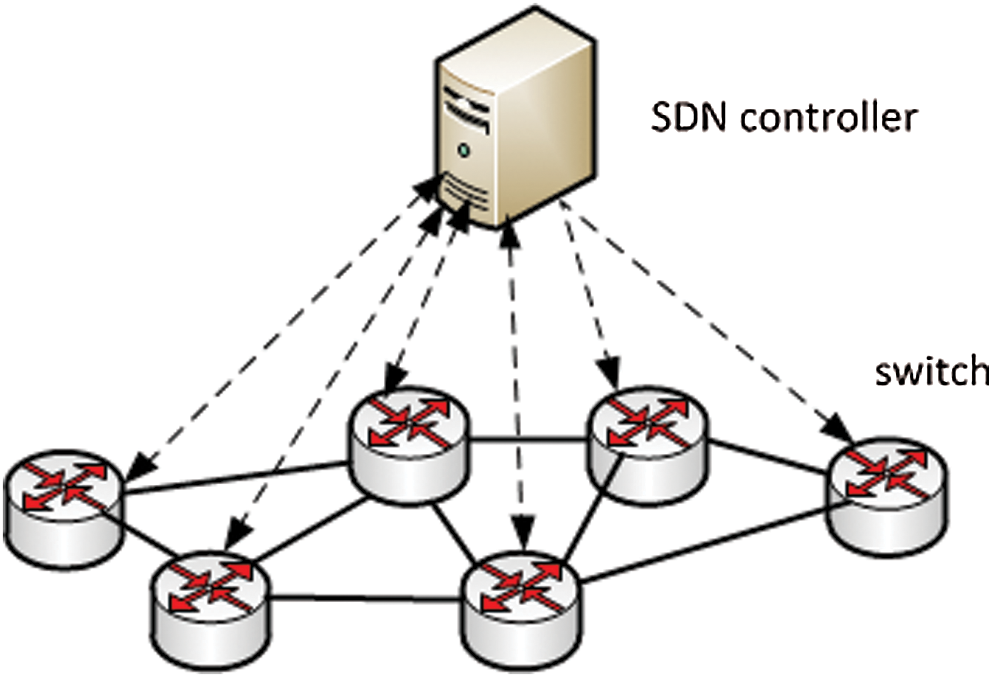
Figure 1: The structure of a software-defined network (SDN)
This makes it possible to organize centralized and decentralized management for network devices and increase the traffic engineering procedure’s functionality. In the case of the centralized manner of path creation, the SDN controller holds all data on the network’s structure and components, which facilitates optimization of paths as per specified metrics in the process of path creation. SDN controller updates routing information for SDN switches by adjusting their routing tables to select the optimal route as well as to secure minimal power consumption/channel congestion [6].
The paper [7] shows a study of various methods and approaches to resolve the issues relating to data traffic optimization in the context of the networks in question. The emphasis is placed upon QoS, congestion control, and load balancing. Through this comparison to a typical network, SDN’s main advantage is in centralized traffic orchestration by the SDN controller. This makes it possible for better implementation of load balancing strategy. Compared to distributed traffic engineering and balancing methods, the centralized method reduces the need for service information exchange. The article [8] proposes a method for multipath routing in SDN based on MPLS technology. Utilizing the SDN Controller’s centralized management manner of label allocation helps improve the efficiency of the traffic orchestration process. In the multipath routing, MPLS network routers generate labels for multiple possible paths to the destination. This makes it possible to quickly redirect the traffic flows along an alternative route in case of road congestion. In [9], a multipath routing algorithm is proposed to augment network performance by 10–15% by diminishing the volume of service packets. This also lowers energy consumption by about 41% and increases the maximum use of communication channels by 60% as compared to distributed methods of traffic engineering and balancing. In [10], the authors propose a method for traffic orchestration, which, due to the centralized method of generating routing information in the SDN controller and the use of multipath routing, makes it possible to make simplify the traffic reconfiguration procedure and guarantee the most equal network load. The routing information management is conducted by using the wave routing algorithm [11]. In this case, paths are simultaneously created from all intermediate nodes to the final node. The study [12] deals with the SDVN network design and considers the advantages of SDN technology utilization for building transport networks. Fig. 2 shows the structure of the SDVN network.

Figure 2: The structure of the SDVN network
3 Proposed Traffic Orchestration Procedure
3.1 Traffic Orchestration Criterion
The transport network in Fig. 3 is represented as a loaded graph G(V, C, D), where  the set of vertices denotes the set of switches (crossroads) of the transport network;
the set of vertices denotes the set of switches (crossroads) of the transport network;  —the set of channels (sections) of the path between adjacent crossroads vi and vj;
—the set of channels (sections) of the path between adjacent crossroads vi and vj;  —loading channels ck(vi, vj) of the path.
—loading channels ck(vi, vj) of the path.
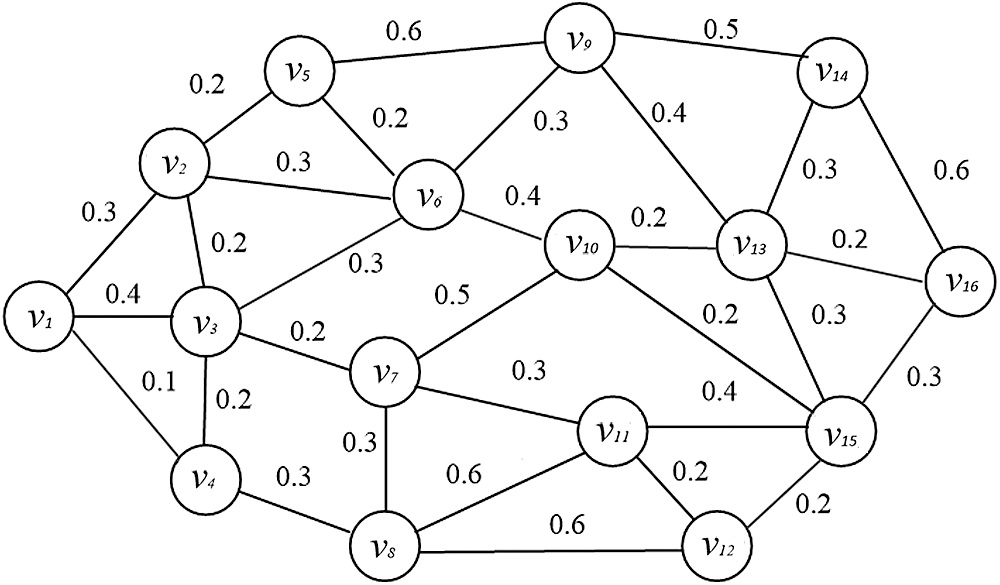
Figure 3: Transport network graph
A basic issue with well-known traffic engineering models has several flows undergoing redirection to the shortest path, thus resulting in load imbalance [13,14]. It is essential that nature and volume be taken into consideration to handle this during traffic orchestration.
This is important for transport networks, in which a large load of the route channels leads to traffic congestion. The speed of vehicles, including travel time, depends on the network load. Different values of the path channel load also cause a decline in the average speed and throughput of the entire transport network [1,2]. Therefore, while creating the next path pi(vs, ve) it is necessary to take into account the average load of its channels: 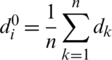 [15].
[15].
As an example, consider the four shortest paths between vertices v1 and v16 (Fig. 3):
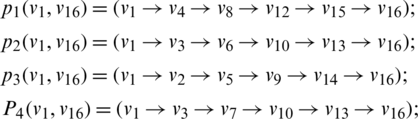
Average path load p1(v1, v16) is  .
.
Average path load p2(v1, v16) is  .
.
Average path load p3(v1, v16) is  .
.
Average path load p4(v1, v16) is  .
.
The paths p1(v1, v16), p2(v1, v16)  p4(v1, v16) have equal average channel load.
p4(v1, v16) have equal average channel load.
Fig. 4 shows the load of channels paths p1(v1, v16), p2(v1, v16), p4(v1, v16) and their average value d0.

Figure 4: Load of channels paths p1(v1, v16), p2(v1, v16), p4(v1, v16) and their average value d0
Thereby, it is important to pick paths with the least average load and deviation of the path load. In this case, the path p2(v1, v16) is chosen, since the path comprises more evenly loaded channels with an equal average load of the channels.
The length of the path channels must be taken into account when choosing a path. The longer the path channel, the more the congestion affects the load equability on the entire path.
To address this issue, the present work proposed to utilize the coefficient of equability of loading the path channels as a criterion for choosing the path:

where: n—number of path channels pi(vs, ve);
 —average load of path channels pi(vs, ve);
—average load of path channels pi(vs, ve);
dk—channel load  ;
;
Li—path length pi(vs, ve);
lk—channel length ck(vi, vj).
For example, consider a network with equal channel lengths.
In this case lk = Li/n.
For the path p1(v1, v16) the equability of the loading criterion M1(v1, v16) = 0,656.
For the path p2(v1, v16) the equability of the loading criterion M2(v1, v16) = 0,692.
For the path p3(v1, v16) the equability of the loading criterion M3(v1, v16) = 0,536.
For the path p4(v1, v16) the equability of the loading criterion M4(v1, v16) = 0,642.
In this case, the chosen path is p2(v1, v16).
The equability of the path channels’ loading criterion depends on their length; for example, if the channel c5, 9 of the path p1(v1, v16) is three times longer than M1(v1, v16) = 0.643, then the M1(v1, v16) criterion will be 1.3% lower.
Thus, the coefficient Mi makes it possible to optimize the traffic of vehicles by choosing the least loaded equal path.
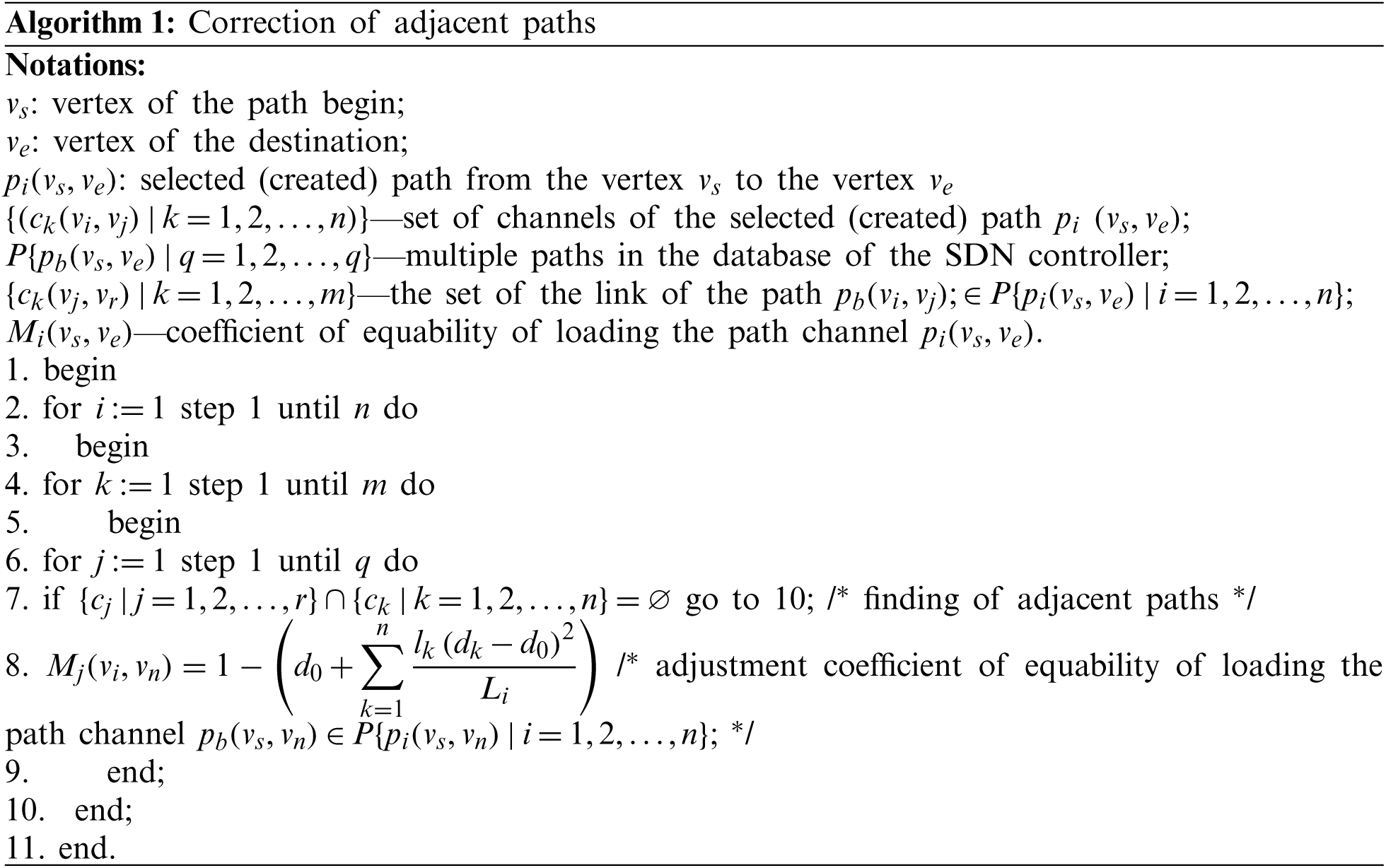
3.2 Traffic Orchestration Algorithm
Fig. 5 shows the flowchart of traffic orchestration. The SDN controller receives requests from switches  to create a path between switches vi and vn, where: j—denotes the number of the request from the switch vi; gj—signifies the request priority Qi(j). The non-priority request corresponds to gj = 0, and the priority one corresponds to gj = 1. Priority requests come from special vehicles. Path requests are processed based on their priority and arrival time.
to create a path between switches vi and vn, where: j—denotes the number of the request from the switch vi; gj—signifies the request priority Qi(j). The non-priority request corresponds to gj = 0, and the priority one corresponds to gj = 1. Priority requests come from special vehicles. Path requests are processed based on their priority and arrival time.
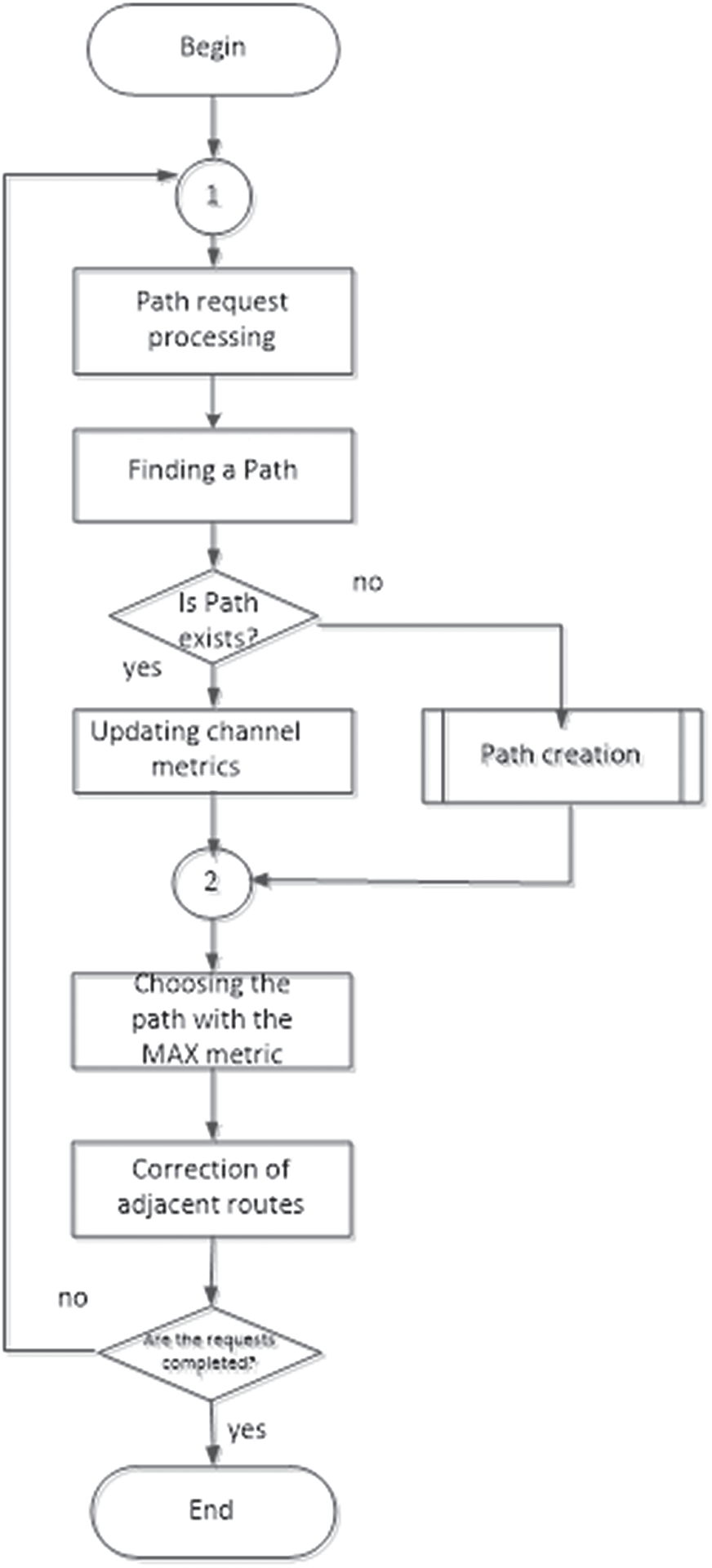
Figure 5: The flowchart of traffic orchestration algorithm
The paths are discovered from SDN controller path database. For every path pi(vs, ve) there is a corresponding set of vertices included in  and distance vectors Ri(vs, ve) =
and distance vectors Ri(vs, ve) =  , where va—adjacent node towards the end node ve; Mi(vs, ve)—channels load equability coefficient.
, where va—adjacent node towards the end node ve; Mi(vs, ve)—channels load equability coefficient.
Tab. 1 shows the values of the distance vectors for the paths:
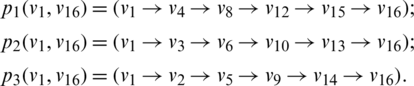
Table 1: Distance vector table for switch v1
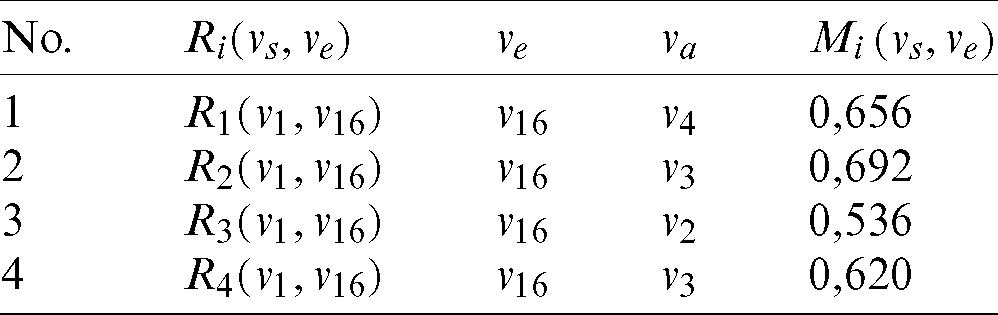
In this case, the path p2(v1, v16) is chosen.
The created path can fully or partially coincide with the path from the database. Here, we will formulate the condition for the path presence between two arbitrary vertices of the transport network graph.
Lemma 1. The condition for the path presence pj(vs, ve) between two vertices  :
:

where: vs—the initial vertex of the desired path;
ve—final vertex of the desired path;
 —the set of vertices of the path
—the set of vertices of the path  ;
;
 —the set of paths from the SDN controller database.
—the set of paths from the SDN controller database.
For example, consider finding the path pi(v3, v13) between vertices v3 and v13, and paths presence in the database  :
:
1.  ;
;
2.  ;
;
3.  ;
;
4.  ;
;
5.  ;
;
6.  .
.
In this case, condition (2) for the set of paths  and the path pi(v3, v13):
and the path pi(v3, v13):
1.  ;
;
2.  ;
;
3.  ;
;
4.  ;
;
5.  ;
;
6.  .
.
Consequently, three paths are discovered between the vertices v3 and v13:
1.  ;
;
2. 
3.  ;
;
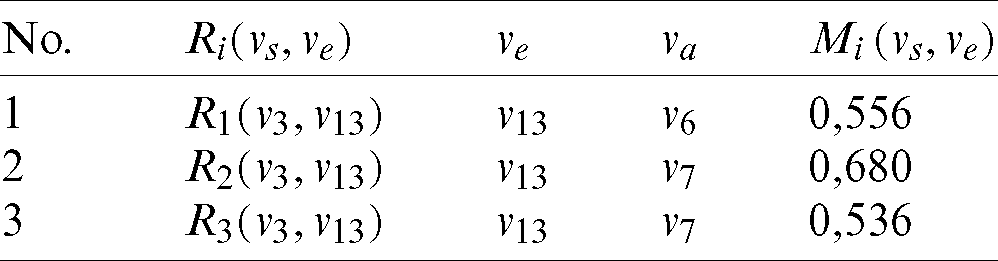
For the selected paths in the SDN controller, the metrics of their channels are updated, and the value Mi(v3, v13) is calculated for each path p1(v3, v13). Also, the distance vector table for the switch v3 is created (Tab. 2).
Table 2: Distance vector table for switch v3
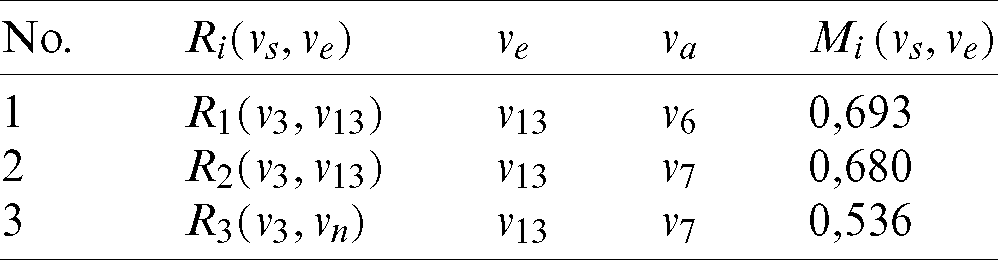
Path data, along with their distance vectors, gets updated in the SDN controller database. In this case, the path p1(v3, v13) is chosen, which forms part of the path  with value of M1(v3, v13) = 0,693.
with value of M1(v3, v13) = 0,693.
For  the SDN controller database does not contain any information about path between vi and vn. In this case, routing information is generated based on the modified Backward Wave algorithm [16]. The routing information is created in a wave manner, beginning from the final vertex, similar to the distance-vector routing algorithm. The routing information has been created sequentially between adjacent sets of vertices Vi+1 and Vi. The creation starts with the vertex
the SDN controller database does not contain any information about path between vi and vn. In this case, routing information is generated based on the modified Backward Wave algorithm [16]. The routing information is created in a wave manner, beginning from the final vertex, similar to the distance-vector routing algorithm. The routing information has been created sequentially between adjacent sets of vertices Vi+1 and Vi. The creation starts with the vertex  . Simultaneously, further paths are developed between the intermediate and final routers. Therefore, for each node
. Simultaneously, further paths are developed between the intermediate and final routers. Therefore, for each node  of the path pj(vs, ve) the table of distance vectors is created
of the path pj(vs, ve) the table of distance vectors is created  . The vertex
. The vertex  . The creation ends when
. The creation ends when  . For the initial node vi of the path, the table of distance vectors is created
. For the initial node vi of the path, the table of distance vectors is created  along with the set of paths
along with the set of paths  between vertices vi and ve.
between vertices vi and ve.
Let’s consider an example of the routing information created between the vertices v1 and v16 (Fig. 3). For i=1 the set  , and the set
, and the set  .
.
Three paths are created: p1(v13, v16); p2(v14, v16); p3(v15, v16).
The path p1(v13, v16) contains the set of vertices  , M1(v13, v16) = 0.8.
, M1(v13, v16) = 0.8.
Tab. 3 shows the value of the distance vector for the vertex v13 in the direction of the vertex v16.
Table 3: Distance vector table for switch v13

The path p1(v14, v16) contains a set of vertices  , Mj(v14, v16) = 0.4.
, Mj(v14, v16) = 0.4.
Tab. 4 shows the value of the distance vector for the vertex v14 in the direction of the vertex v16.
Table 4: Distance vector table for switch v14

The path p1(v15, v16) contains a set of vertices  , M1(v15, v16) = 0.7.
, M1(v15, v16) = 0.7.
Tab. 5 shows the value of the distance vector for the vertex v15 in the direction of the vertex v16.
Table 5: Distance vector table for switch v15

For i = 2 the set  , and the set
, and the set  .
.
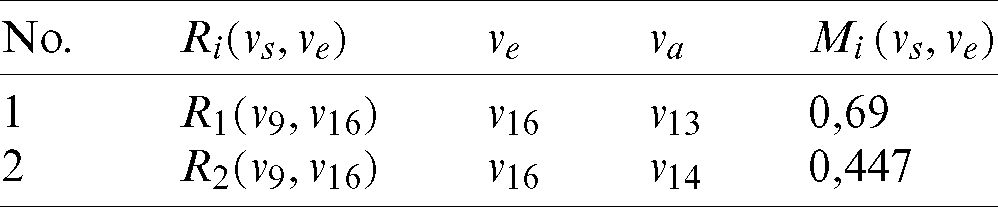
6 paths are created in the direction of the vertex v16. The paths p1(v9, v16) and p2(v9, v16) are created from the vertex v9.
The path p1(v9, v16) contains the set of vertices  , M1(v9, v16) = 0.69.
, M1(v9, v16) = 0.69.
The path p2(v9, v16) contains the set of vertices  , M2(v9, v16) = 0.447.
, M2(v9, v16) = 0.447.
Tab. 6 shows the value of the distance vector for the vertex v9 in the direction of the vertex v16.
Table 6: Distance vector table for switch v9
In this case, the optimal path is p1(v9, v16).
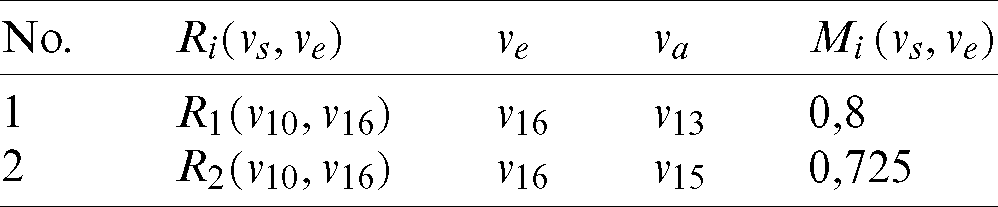
Paths p1(v10, v16) and p2(v10, v16) are created from vertex v10.
The path p1(v10, v16) contains the set of vertices  , M1(v10, v16) = 0.8.
, M1(v10, v16) = 0.8.
The path p2(v10, v16) contains the set of vertices  , M2(v10, v16) = 0.725.
, M2(v10, v16) = 0.725.
Tab. 7 shows the value of the distance vector for the vertex v10 in the direction of the vertex v16.
Table 7: Distance vector table for switch v10
In this case, the optimal path is p1(v10, v16).
One path p1(v11, v16) is created from the vertex v11. The path p1(v11, v16) contains the set of vertices  , M1(v11, v16) = 0.625.
, M1(v11, v16) = 0.625.
Tab. 8 shows the value of the distance vector for the vertex v11 in the direction of the vertex v16.
Table 8: Distance vector table for switch v11

One path p1(v12, v16) is created from the vertex v12. The path p1(v12, v16) contains the set of vertices  , M1(v12, v16) = 0.725.
, M1(v12, v16) = 0.725.
Tab. 9 shows the value of the distance vector for the vertex v12 in the direction of the vertex v16.
Table 9: Distance vector table for switch v12

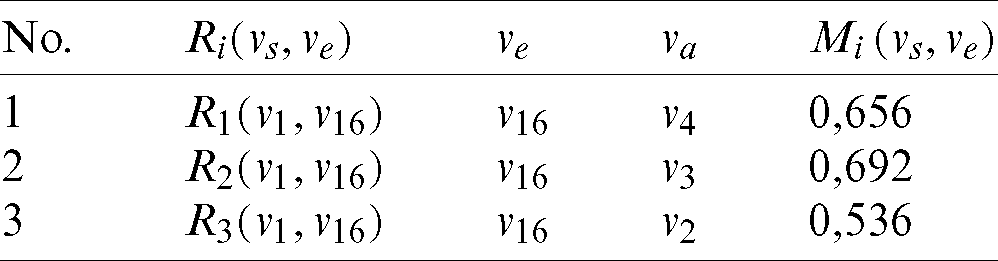
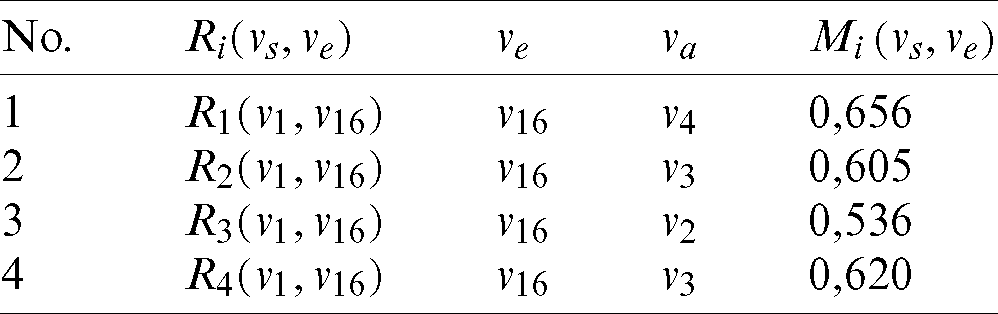
As a result, three disjoint paths pi(v1, v16) with the maximum value of Mj(vi, vn) are formed for the vertex v1 (Tab. 10).
Table 10: Distance vector table for switch v1
While creating new paths or reconfiguring existing ones, the channels’ load of adjacent routes is changing. This makes it imperative to fix adjacent routes to balance the load of the network channels. The centralized method of generating routing information in the SDN controller eliminates the procedure of creating new paths when the network topology changes or its channels are overloaded. The availability of several options of the distance vector at the vertices of the selected path makes it possible to dynamically reconfigure the path considering the change in the channel load. The SDN controller continuously monitors changes of the channel load, recalculates the coefficient of equability for path channels, and incorporates changes made to the distance vector tables on the switches. Based on the updated values of the distance vectors, it reconfigures adjacent paths to load the network channels in a more even manner.
:
Consider load balancing when the load of the path channels is  at 0,4. In this case, the channel load is c2(v6, v10) = 0,7.
at 0,4. In this case, the channel load is c2(v6, v10) = 0,7.
Fig. 6 shows the loading of path channels.
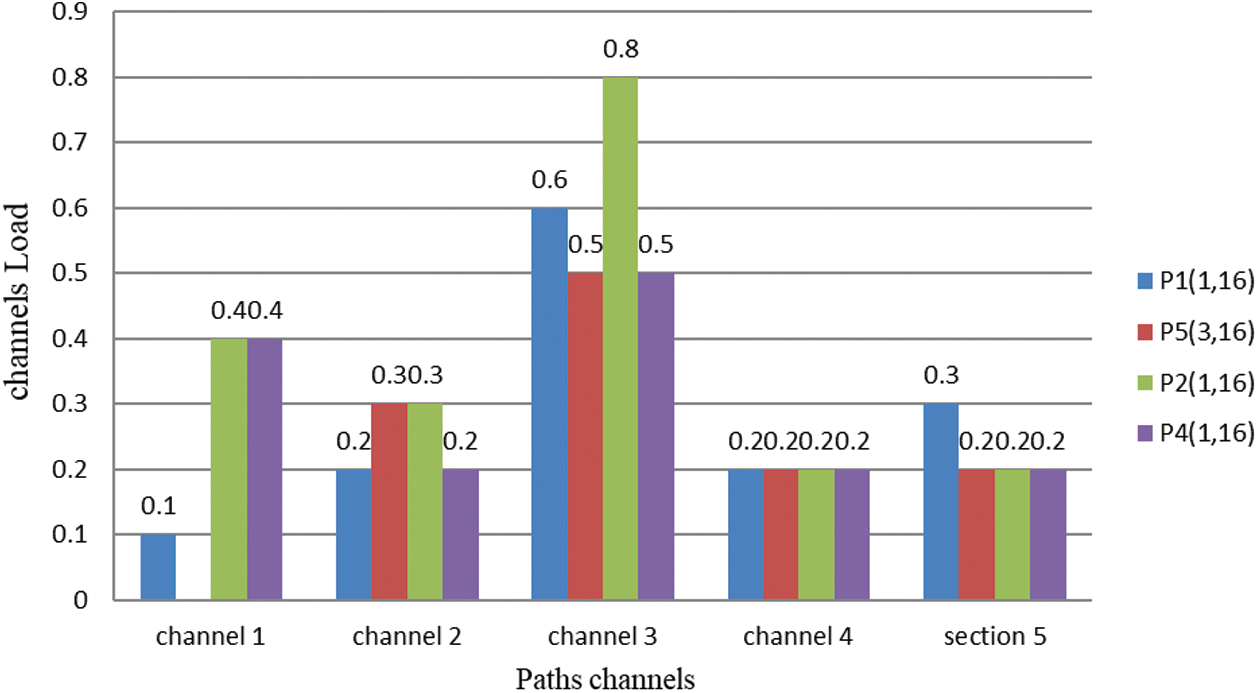
Figure 6: The loading of path channels
The path p1(v5, v15) is adjacent to paths  and
and  .
.
Criterion value M2(v1, v16) for the path  is attributed to the change in the channel load c6, 10 decreases and becomes equal to M2(v1, v16) = 0,605 (Tab. 11). Here, the next path to be chosen is
is attributed to the change in the channel load c6, 10 decreases and becomes equal to M2(v1, v16) = 0,605 (Tab. 11). Here, the next path to be chosen is  with the maximum criterion of equability of loading M1(v1, v16) = 0,656.
with the maximum criterion of equability of loading M1(v1, v16) = 0,656.
Table 11: Distance vector table for switch v1
For the path p1(v3, v13) the value C1(v3) = 0,693 in the routing table of v3 switch will be replaced with C1(v3) = 0.556 (Tab. 12) due to the change in the channel load l6, 10.
Table 12: Distance vector table for switch v3
In this case instead of path  the next path will be selected
the next path will be selected  .
.
The existence of several alternative paths makes it possible to exclude the procedure of new paths created during the movements of vehicles. For example, when a vehicle moves along the path  , dynamic path reconfiguration will take place, depending on the change in the nodes load. During channel l6, 10 load changes, the vehicle from v1 instead of the path
, dynamic path reconfiguration will take place, depending on the change in the nodes load. During channel l6, 10 load changes, the vehicle from v1 instead of the path  will be redirected to the path
will be redirected to the path  ; will be redirected to the path
; will be redirected to the path  when it is at the node v3. When the channels c10, 13 or c13, 16 are overloaded, the vehicle from the node v10 will be directed to the path
when it is at the node v3. When the channels c10, 13 or c13, 16 are overloaded, the vehicle from the node v10 will be directed to the path  instead of the path
instead of the path  .
.
By eliminating recalculation of the routes, the time for path reconfiguration is significantly reduced, along with the probability of delays along the way.
This paper looks at Traffic Orchestration and proposes a related method, which examines the particulars for an SDN organization, and more specifically, due to the central controller’s existence within the network, which makes it possible to reduce the time of the set of routs creation and to simplify the traffic orchestration procedure. The centralized manner of updating the routing information in the SDN controller makes it possible to significantly reduce the time to update the routing information and to simplify the process of traffic engineering, in comparison to distributed routing algorithms.
The modified algorithm for the routing information creation is proposed, thus allowing simultaneous creation of a set of shortest paths not only between the initial and final nodes but also between intermediate nodes of these paths. The existence of multiple routes allows the elimination of delays and packet loss during traffic rerouting.
The standard for selecting the path from available path sets is proposed and justified, which makes it possible to ensure a more equal load of channels during information transmission for a given quality of service parameters.
Although more attention is being paid to Traffic Orchestration in VANETs, there are still many issues that need to be thoroughly investigated.
Further improvements of Traffic Orchestration methods are predicated on predicting and studying the nature of communication channel load utilizing artificial intelligence (AI) technologies [17].
Acknowledgement: The authors extend their appreciation to the Deanship of Scientific Research at King Saud University for funding this work through research Group No. (RG-1439-053).
Funding Statement: This work is supported by King Saud University.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. J. C. Nobre, A. D. Souza, D. Rosario, C. Both, L. A. Villas et al. (2019). , “Vehicular software-defined networking and fog computing: Integration and design principles,” Ad Hoc Networks, vol. 82, no. 1, pp. 172–181. [Google Scholar]
2. C. Rostos, D. King, A. Farshad, J. Bird, L. Fawcett et al. (2017). , “Network service orchestration standardization: A technology survey,” Computer Standards and Interfaces, vol. 54, no. 4, pp. 203–215. [Google Scholar]
3. I. F. Akyildiz, A. Lee, P. Wang, M. Luo and W. Chou. (2016). “Research challenges for traffic engineering in software-defined networks,” IEEE Network, vol. 30, no. 3, pp. 52–58. [Google Scholar]
4. O. S. Al-Heety, Z. Zakaria, M. Ismail, M. M. Shakir, S. Alani et al. (2020). , “A comprehensive survey: Benefits, services, recent works, challenges, security, and use cases for SDN-VANET,” IEEE Access, vol. 8, pp. 91028–91047. [Google Scholar]
5. B. Isong, T. Kgogo and F. Lugayizu. (2017). “Trust establishment in SDN: Controller and applications,” International Journal of Computer Networks and Information Security, vol. 9, no. 7, pp. 20–28. [Google Scholar]
6. A. A. AlZubi, M. Al-Maitah and A. Alaraifi. (2019). “A best-fit routing algorithm for non-redundant communication in large-scale IoT based network,” Computer Networks, vol. 152, pp. 106–113. [Google Scholar]
7. A. Yasir, H. Chasib and Q. M. Zainab. (2018). “Analyzing methods and opportunities in software-defined networks (SDN) for data traffic optimizations,” International Journal on Recent and Innovation Trends in Computing and Communication, vol. 6, no. 1, pp. 75–82. [Google Scholar]
8. D. Zbigniew, R. Grzegorz and C. Piotr. (2020). “MPLS-based reduction of flow table entries in SDN switches supporting multipath transmission,” Computer Communications, vol. 151, pp. 365–385. [Google Scholar]
9. K. Rajasekaran and K. Balasubramanian. (2016). “Energy conscious based multipath routing algorithm in WSN,” International Journal of Computer Networks and Information Security, vol. 1, pp. 27–34. [Google Scholar]
10. Y. Kulakoy, A. Kohan and S. Kopychko. (2019). “Traffic orchestration in data center network based on software-defined networking technology,” in Int. Conf. on Computer Science, Engineering and Education Applications, Kiev, Ukraine, pp. 228–237. [Google Scholar]
11. Y. Kulakoy and K. Kogan. (2014). “The method of plurality generation of disjoint paths using horizontal exclusive scheduling,” Advance Science Journal, vol. 10, pp. 16–18. [Google Scholar]
12. A. A. AlZubi. (2018). “A new method oriented approach for forming multipath routing in cloud computing structure to accessing the protein folding information,” Journal of Medical Imaging and Health Informatics, vol. 8, no. 4, pp. 801–804. [Google Scholar]
13. M. T. Abbas, A. Muhammad and W. C. Song. (2020). “SD-IoV: SDN enabled routing for internet of vehicles in road-aware approach,” Journal of Ambient Intelligence and Humanized Computing, vol. 11, pp. 1265–1280. [Google Scholar]
14. A. A. AlZubi. (2020). “Location assisted delay-less service discovery method for IoT environments,” Computer Communications, vol. 150, pp. 405–412. [Google Scholar]
15. M. T. Abbas and W. C. Song. (2017). “A path analysis of two-level hierarchical road, aware routing in VANETs,” in IEEE Ninth Int. Conf. on Ubiquitous and Future Network, Milan, Italy, pp. 940–945. [Google Scholar]
16. A. Abugabah, A. A. AlZubi, O. Alfarrai, M. Al-Maitah and W. S. Alnumay. (2020). “Intelligent traffic engineering in software-defined vehicular networking based on multi-path routing,” IEEE Access, vol. 8, pp. 62334–62342. [Google Scholar]
17. A. A. AlZubi. (2017). “Bittorrent protocol for mobile health care system in hybrid P2P network architecture,” Journal of Medical Imaging and Health Informatics, vol. 7, no. 2, pp. 508–513. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |