
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Enhancing Critical Path Problem in Neutrosophic Environment Using Python
VIT-AP University, Inavolu, Besides AP Secretariat, Amaravati AP, India
* Corresponding Author: Ranjan Kumar. Email:
(This article belongs to the Special Issue: Advances in Ambient Intelligence and Social Computing under uncertainty and indeterminacy: From Theory to Applications)
Computer Modeling in Engineering & Sciences 2024, 140(3), 2957-2976. https://doi.org/10.32604/cmes.2024.051581
Received 09 March 2024; Accepted 14 May 2024; Issue published 08 July 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the real world, one of the most common problems in project management is the unpredictability of resources and timelines. An efficient way to resolve uncertainty problems and overcome such obstacles is through an extended fuzzy approach, often known as neutrosophic logic. Our rigorous proposed model has led to the creation of an advanced technique for computing the triangular single-valued neutrosophic number. This innovative approach evaluates the inherent uncertainty in project durations of the planning phase, which enhances the potential significance of the decision-making process in the project. Our proposed method, for the first time in the neutrosophic set literature, not only solves existing problems but also introduces a new set of problems not yet explored in previous research. A comparative study using Python programming was conducted to examine the effectiveness of responsive and adaptive planning, as well as their differences from other existing models such as the classical critical path problem and the fuzzy critical path problem. The study highlights the use of neutrosophic logic in handling complex projects by illustrating an innovative dynamic programming framework that is robust and flexible, according to the derived results, and sets the stage for future discussions on its scalability and application across different industries.Keywords
Planning multiple tasks to develop and execute the project within the allotted time frame is an essential part of project management [1]. Time restrictions are a common source of failure while working manually in many industries. Project managers use scheduling tools like Gantt charts and network planning to address such issues. Previous researchers were involved in the study of Gantt charts due to their less complex nature. Furthermore, large-scale and more complicated project execution has emerged since 1950, leading to the development of project management models, i.e., network analysis.
Network analysis deals with the coordination of project scheduling and the identification of task interdependencies to design and analyze [2]. This analytical framework employs two primary methodologies: the CPM (Critical Path Method) and the PERT (Program Evaluation and Review Technique). Kelly and Walker created CPM [3], which provides definitive project execution schedules in a chronological pattern based on deterministic time estimation [4]. PERT was created by Malcolm et al. [5] and is also called the backward research method [6] because it has a three-time estimation that takes the account of uncertainty [7]. Our study examines the critical path problem (CPP) using the CPM approach, which is a common method in project management, to distinguish between critical and non-critical tasks. This makes it easier to solve problems and avoid delays. CPP improves the project’s efficiency by helping to determine the minimum feasible time for task completion [8]. Utilizing CPP involves a multitude of operational metrics, including the calculation of the maximum time allowance, the earliest and latest initiation, and the corresponding completion time [9]. Traditional CPP practices dictate that fixed-time estimations represent this project activity. However, predicting future events in the real world is difficult due to the inherent unpredictability of dynamic project environments [10].
An anthology of researchers demonstrated the classical critical path problem (CCPP) study in project scheduling across a variety of domains. However, improving project management and control in the CCPP faces challenges in anticipating and estimating parameters involving uncertainty to calculate time deviations. In such a scenario, Zadeh introduced the concept of fuzzy logic to address the limitations of classical set theory while dealing with the study of vagueness and uncertainty in real-world situations [11]. Following up on Zadeh’s theory, Atanassov [12] introduced the legerdemain concept of intuitionistic fuzzy sets (IFS) in 1986, involving both membership and non-membership functions. To advance the study of uncertainty, researchers developed triangular fuzzy numbers (TrFN) [13] and trapezoidal fuzzy numbers (TFN) [14] to represent uncertainty. More fuzzy numbers have been made, like octagonal [15], heptagonal [16], and hendecagonal [17]. This shows that the research has gone beyond the initial forms. Researchers further conducted the study to extend zadeh’s pioneering work in fuzzy logic to a variety of practical applications. In one of these efforts, Mehlawat et al. [18] used IFS to study multi-criteria decision-making (MCDM) for critical path selection. An advanced methodology to implement fuzzy methods to handle the challenges of project management. Another study by Revathi et al. [17] showed how flexible and useful fuzzy critical path problems (FCPP) in managing agricultural projects. It uses a variety of fuzzy parameters, such as trapezoidal, heptagonal, and hendecagonal fuzzy numbers, to accurately handle the complexity of agricultural data. Senussi et al. [19] also used the TFN parametric form to account for uncertainty in planning projects that will make important contributions to the field. Ganesan et al. [20] analyzed another notable study of inter-valued parameters in operational networks. Further, many studies have implemented fuzzy environments in different optimization techniques such as supply chain [21], transportation [22] and so on. Although fuzzy logic has improved, it cannot fully capture real-world uncertainty. There are still unresolved issues while solving CCPP and FCPP under uncertain circumstances. This shift is being driven to address the research gaps leading to neutrosophic logic.
To adopt such parameters, Smarandache [23] introduced the neutrosophic set (NS) in 1998 with three integrands: truthiness, indeterminacy, and falsity, unlike the general fuzzy and IFS. With the daily progress of research, Wang et al. [24] proposed a single-valued neutrosophic set (SVNS) that solves complex problems by involving the study of uncertain parameters. Investigations by Chakraborty et al. [25,26] examined different categories of trapezoidal and triangular neutrosophic numbers. Fernandez et al. [27] and Abdel-Basset et al. [28] looked into the method using a single-valued trapezoidal neutrosophic number (SVTNN); this technique employs neutrosophic PERT (NPERT) to effectively navigate unpredictable settings via network analysis. Based on these findings, Nagalakshmi et al. [29] compared the study of NS and FCPP. This comparative research shows that neutrosophic sets can provide greater versatility in risk assessment. Another work by Priyadharsini et al. [30] evaluated triangular NPERT analysis for estimating project time and costs. A lot of researchers are studying NS under different optimization methods, such as the shortest path [31], minimum spanning tree [32], MCDM [33], linear programming problem [34], and so on. In addition to their theoretical and practical uses, ongoing research also uses computer implementations of these advanced ideas. These have greatly improved tools, such as the NCMPy package for managing neutrosophic cognitive maps [35] and the open-source python neutrosophic package [36], which are based on this theoretical base. The main study is about how to solve CPP in a neutrosophic environment using the python programming language. This will enhance the effectiveness and efficiency of computing environments by enabling the effective application of neutrosophic understanding.
The following is a list of the key research contributions to the development of the CPP objective:
• According to recent literature, CPP solves complex problems by including uncertainty study.
• To represent uncertainty, our proposed model uses CPP in a neutrosophic environment (NCPP). It uses a single-valued triangular neutrosophic number (TrSVNN) to represent the uncertainty and ambiguity that come with project timelines. Furthermore, the initiation also addresses a new set of problems with varying uncertainty parameters.
• The task involves implementing a score function that aims to quantify the accuracy of project analysis.
• Developed the proposed methodology in python, a computational programming language, to elucidate the nuances of neutrosophic logic.
• Implementing a comparative analysis that reveals neutrosophic logic’s superior capabilities over classical and fuzzy in demonstrating its enhanced effectiveness while dealing with uncertainty and complexity.
In recent years, there has been an increasing focus within the academic community on developing the study of the neutrosophic field to discover innovative applications in varied domains. Despite the progress in understanding and applying TrSVNN, a multitude of unresolved theories and challenges continue to persist. The primary objective of this research article is to shed light on the concepts of the neutrosophic domain and offer a novel viewpoint on its possible applications. Our novelty includes:
• Developed a novel approach while employing TrSVNN, an effective and simple model for handling uncertain information.
• The literature utilizes a scoring approach under neutrosophic study as a further extension of FCPP.
• A comparative study analysis is conducted on our proposed model to that of previous existing FCPP and CCPP models.
• An innovation to this study is the use of python for computational execution, which aids in better quality decision-making.
The structure of the article unfolds as follows: Section 2 defines the prelims useful for the development of the document. Section 3 gives the methodology about the existing classical and neutrosophic environment, where the discussion of classical critical path is derived in Subsection 3.1 and introduces the proposed devlopment of neutrosophic formulation on the working principle of CPP mentioned in Subsection 3.2 and the proposed algorithmn is breifly discussed in Subsection 3.3. Further, Section 4 solves numerical example study that provides existing CCPP in Section 4.1 and solves existing literature in Section 4.2, further the new set of problem of NCPP using three different cases was implemented in Subsection 4.3 and lastly conclusion.
The paper includes a background on the fundamental concepts of FS, NS, TrSVNN is as follows:
Definition 2.1. Fuzzy Set [11]: A set
Definition 2.2. Neutrosophic Set (NS) [23]: A set
Definition 2.3. Triangular Single-Valued Neutrosophic Number (TrSVNN) [25]: TrSVNN is defined as
In special case, when
Definition 2.4. Comparison between two SVTNN [37]: Consider two SVTNN as
1.
2. If
where
1. Score function is defined as:
2. Accuracy function is defined as:
3. Certainty function is defined as:
Note: If the SVTNN
Definition 2.5. Arithmetic operations between two (TrSVNN) [38]: Let
• Addition:
• Subtraction:
Definition 2.6. Binary operations between two (TrSVNN): Let
2.1 List of Abbreviation Used throughout This Paper
• CPP represents “critical path problem”.
• TrFN represents “triangular fuzzy number”.
• TFN represents “trapezoidal fuzzy numbers”.
• TrIFS represents “triangular intuitionistic fuzzy sets”.
• CCPP represents “classical critical path problem”.
• NS represents “neutrosophic set”.
• TrSVNN represents “single-valued triangular neutrosophic number”.
• SVTNN represents “single-valued trapezoidal neutrosophic number”.
• CP represents “critical path”.
• NPP represents “neutrosophic non-critical possible paths”.
• NCPP represents “neutrosophic critical path problem”.
• NCPL represents “neutrosophic critical path length”.
• NCP represents “neutrosophic critical path”.
• CCPL represents “critical crisp path length”.
• FCPP represents “fuzzy critical path problems”.
• FCP represents “fuzzy critical path”.
• FCPL represents “fuzzy critical path length”.
The exploration to delve the study of existing CCPP and the proposed NCPP is discussed above to enhance the decision-making framework in addressing the uncertainty in project scheduling.
3.1 Existing Critical Path Network Problem Formulation under Classical Environment
The CCPP implements a dynamic programming in the network, a cyclic-directed graph
The weight
3.2 Proposed Critical Path Network Problem Formulation under Neutrosophic Environment
The NCPP and edge weights

Figure 1: Triangular single-valued neutrosophic of
The interval within edge weights
Refining this expression yields:
If
where equality holds at least one pathway since
Transitioning neutrosophic on both sides of the equation, the modified Eq. (3.6) evolves to:
Before proceeding with the further step, the implementation of the score function
Let
The reformulation of Eq. (3.1) is as follows: for any vertex
Updating and applying neutrosophic on both sides of the Eq. (3.10) allows us to compare the aggregated neutrosophic weights as follows:
Ensuring the preservation of at least one instance of equality from Definition 2.4 and Eq. (3.5) refined within the edge connections from vertex
Consequently, from the Eqs. (3.5), (3.10), and (3.12), the decision maker (DM) choose appropriate bounds:
The dynamic programming problem recursion for the neutrosophic critical path problem from the Eqs. (3.9), and (3.12) is thus formalized as:
Encapsulate Eq. (3.14), where
3.3 Proposed Algorithm for Solving TrSVNN NCPP

The numerical analysis shows a network structure defined in Fig. 2 from [39], where nodes 1 to 5 are project activities. Initial activity durations are based on the existing CCPP. The proposed algorithmic method transmits the initial activity durations to the TrSVNN context. Decision-makers utilize the interval for each activity and choose appropriate values corresponding to truth, indeterminacy, and falsity

Figure 2: Project network
4.1 Existing Classical Critical Path Problem (CCPP)
Example 4.1. In CCPP [39], assuming the edge weights of the network (ref Fig. 2) are as follows:
Solution: The working model from Eq. (3.1) is calculated, and the CP of the classical case from node 1 to node 5 is
4.2 Comparing with the Existing Method
In the upcoming study, the representation of TrSVNN is considered to encapsulate the uncertainty and imprecision of project activity’s time durations using the same network diagram of Fig. 2. In Example 4.2,
Example 4.2.1. Case-I: If the DM chooses the condition as
Solution: Step 1 defines the project network (ref Fig. 2). Using the algorithmic steps from 2 to 5, the DM chooses the appropriate lower and upper bounds as follows:

From Steps 6 to 8, the case-I

Figure 3: Case-I
Finally, the NCPL is
Example 4.2.2. Case-II: If the DM chooses the condition as
Solution: Similary, by implementing our proposed algorithmn in Subsection 3.3, the bounds are structured as:

In contrast, case-II
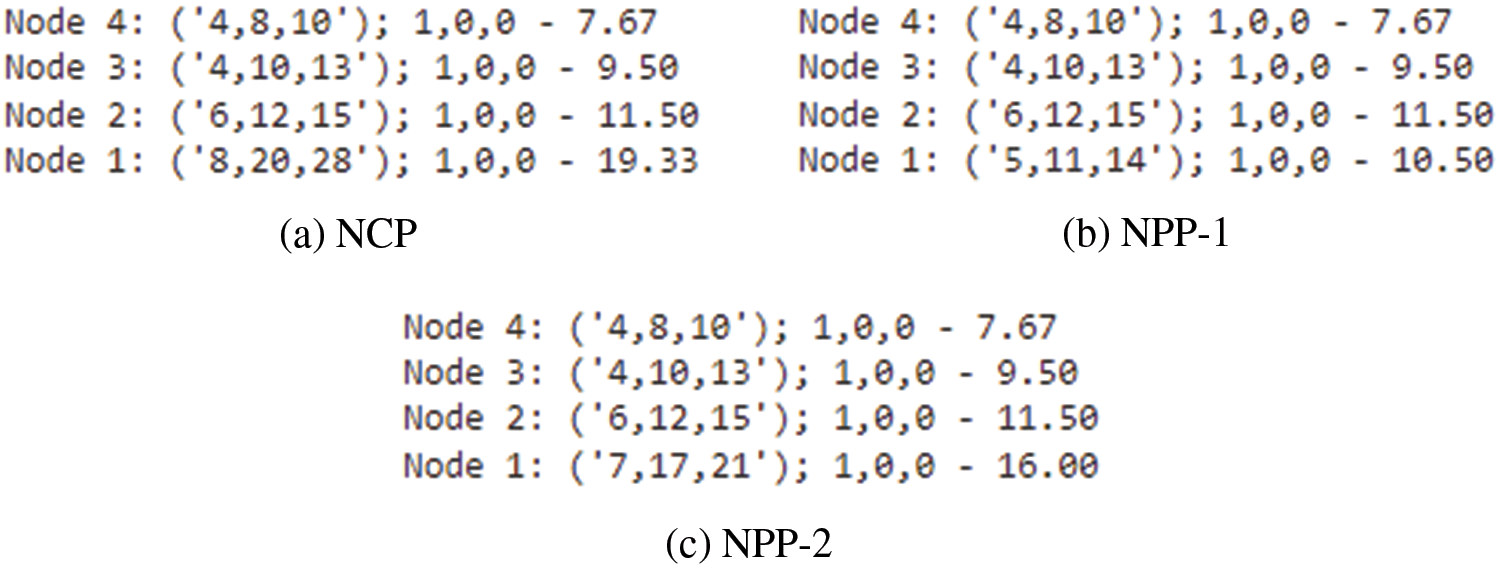
Figure 4: Case-II
Based on the condition
Example 4.2.3. Case-III: If the DM chooses the hybrid approach condition as
Solution: Similarly, implementing the algorithmic approach from steps 1 to 9, the obtained lower and upper bounds as:

Upon the analysis using three hybrid case-III
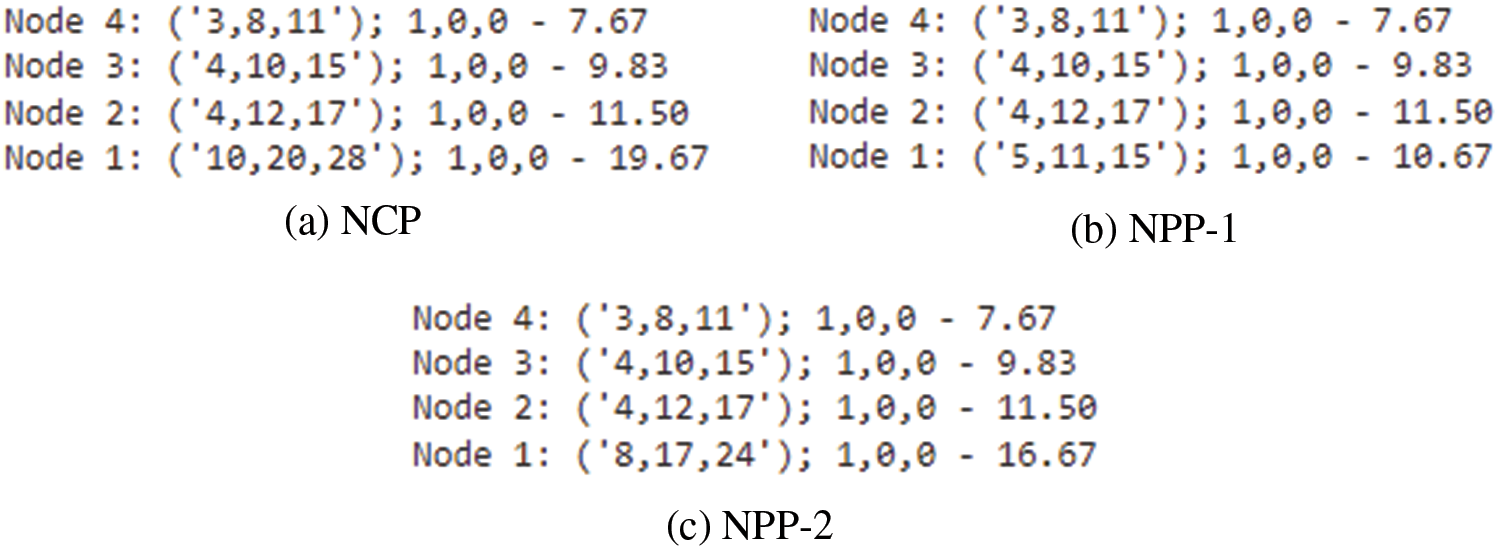
Figure 5: Case-III
For case-III, the NCPL is
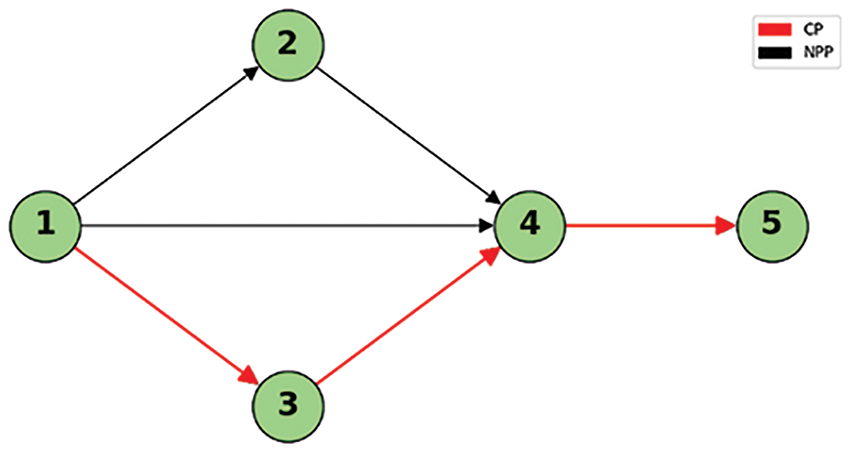
Figure 6: CP and NPP
Synthesizing the neutrosophic decision-making parameter involving three distinct cases to illustrate the complexity of project uncertainty and equivalence. The condition


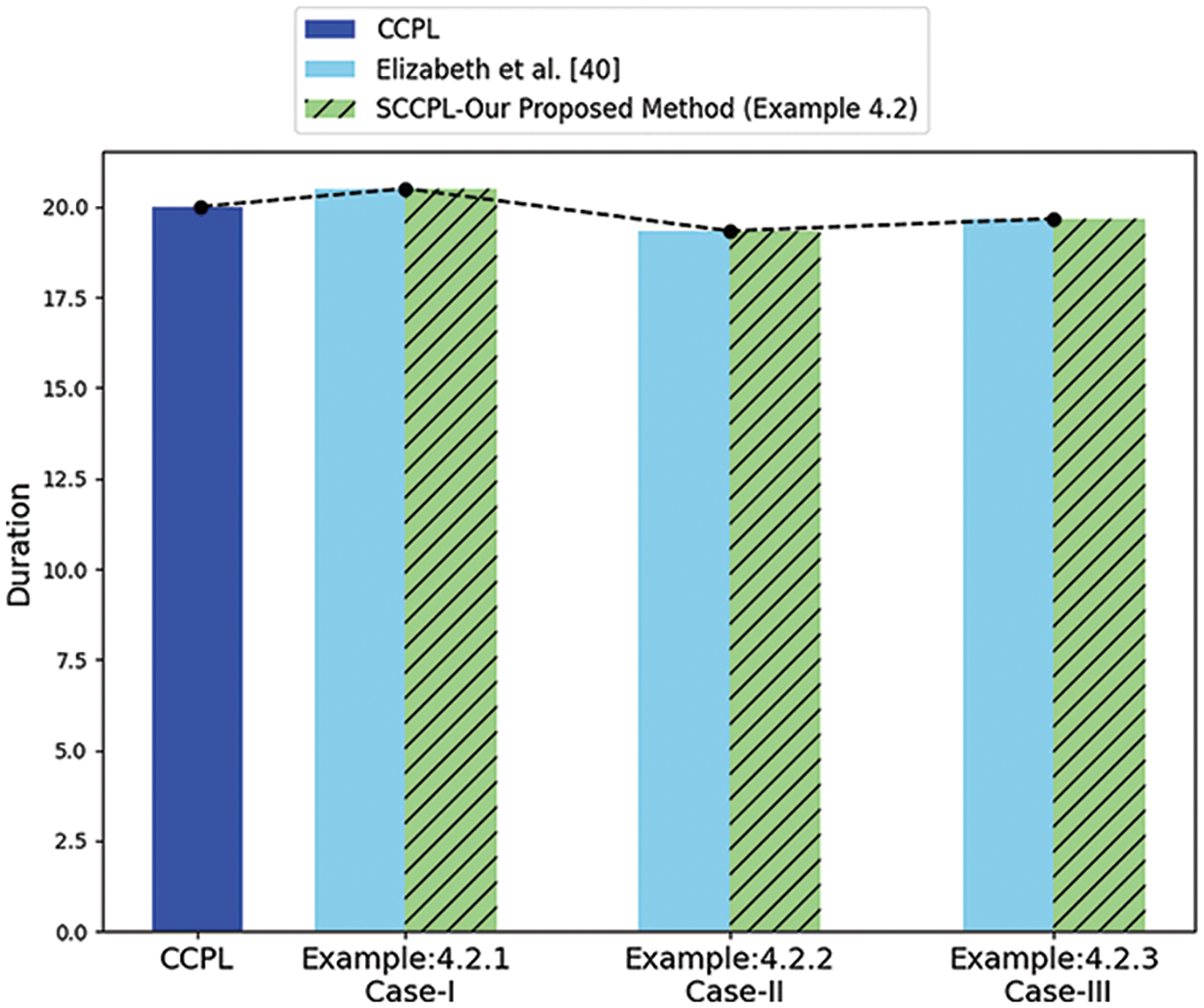
Figure 7: Comparison of classical, fuzzy, and neutrosophic (ref Table 4)
4.3 Analysis of Neutrosophic Path Lengths Under Varied Degrees
Example 4.3. Within this framework, the study now advances by exploring neutrosophic with varied degrees of uncertainty. From the previous Example 4.2, the study outlines TrSVN with

Solution: From Table 6, the proposed algorithm from steps 1 to 9 evaluates the result outcomes of NCPP. It illustrates different neutrosophic conditions by varying uncertainty parameters; the obtained SCCPL is 17.36 days, when illustrated the condition


The comparison between Example 4.2 and Example 4.3 involving the study results having the same NCP as
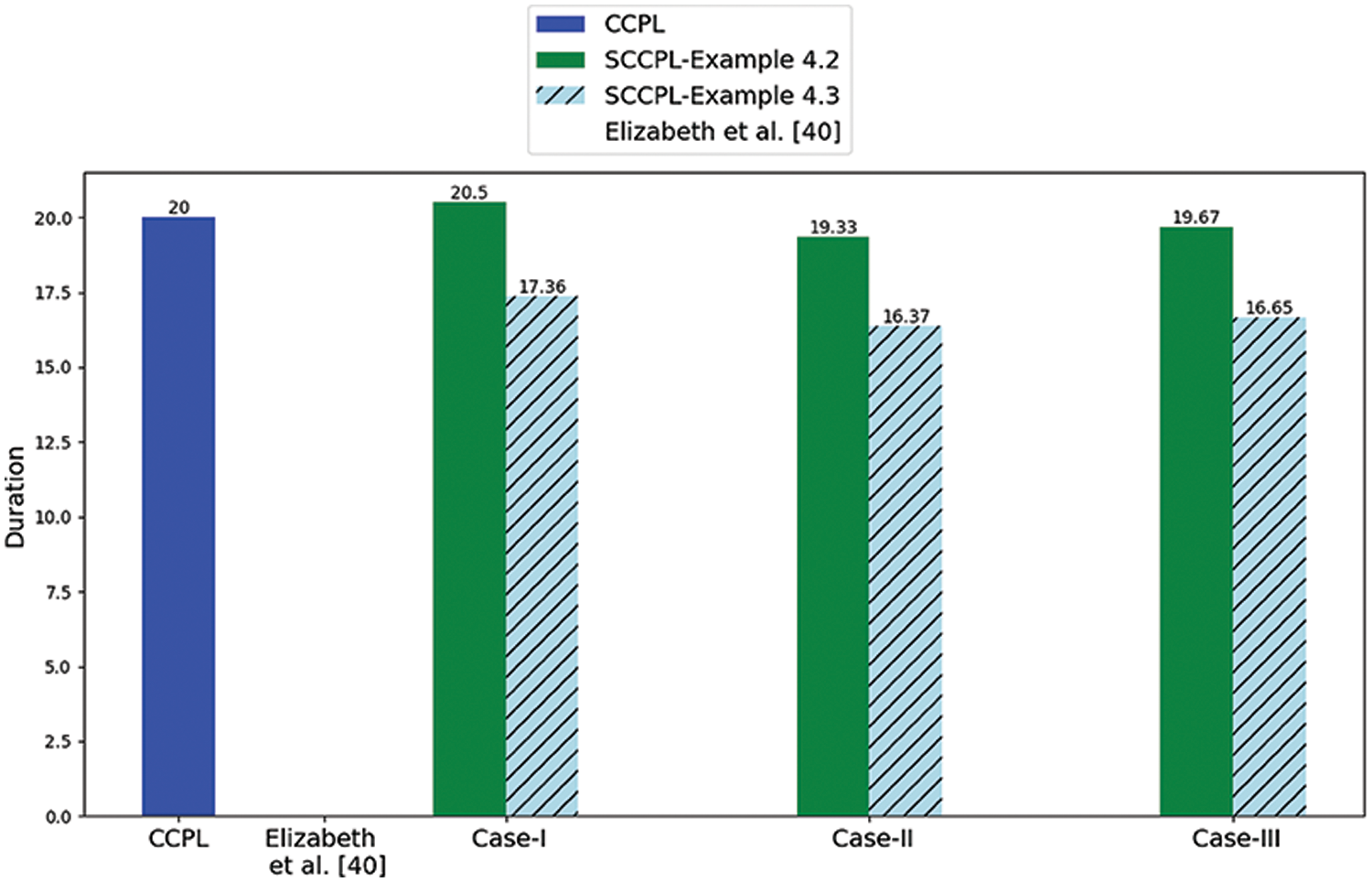
Figure 8: Comparison of neutrosophic with varying conditions against existing models (ref Tables 7 and 4)

A comparison of NCPP with both conventional CCPP and FCCPP was the primary emphasis of Examples 4.2 and 4.3. More conventional systems tend to simplify or ignore the inherent uncertainties in project management activities; the main goal was to evaluate NCPP’s ability to accommodate and dynamically adapt to these uncertainties.
Our study proposes a structured NCPP model that integrates into project management networks. This dynamic method’s adaptive algorithm updates project uncertainty dynamically. By leveraging the capabilities of TrSVNN, the NCPP facilitates a refined measurement of uncertainty that plays a crucial role in the field of complex projects. Using NCPP in three different situations gives a more varied result while keeping the same NCP as
Acknowledgement: The authors express their sincere gratitude to the reviewers and the chief-editor for their valuable insights and suggestions, which significantly enhanced the quality and depth of our paper.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Navya Pratyusha M., Kumar R.; analysis and interpretation of results: Navya Pratyusha M., Kumar R.; draft manuscript preparation: Navya Pratyusha M. The authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: All the data contained in this study from the necessary sources can potentially access or by getting in touch with the paper’s corresponding author.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Idama A. Operational research applications for management decision-making. Yola, Nigeria: Paracelete Publishers; 1999. [Google Scholar]
2. Mazlum M, Guneri AF. Cpm, pert and project management with fuzzy logic technique and implementation on a business. Procedia-Social and Behav Sci. 2015;210:348–57. doi:10.1016/j.sbspro.2015.11.378. [Google Scholar] [CrossRef]
3. Kelley JE, Walker MR. Critical-path planning and scheduling. In: Eastern Joint IRE-AIEE-ACM Computer Conference; 1959; New York, USA. doi:10.1145/1460299.1460318. [Google Scholar] [CrossRef]
4. Kholil M, Alfa BN, Hariadi M. Scheduling of house development projects with CPM and PERT method for time efficiency (case study: house type 36). IOP Conf Series: Earth and Environ Sci. 2018;140(1):1–8. doi:10.1088/1755-1315/140/1/012010. [Google Scholar] [CrossRef]
5. Malcolm DG, Roseboom JH, Clark CE, Fazar W. Application of a technique for research and development program evaluation. Operat Res. 1959;7(5):646–69. doi:10.1287/opre.7.5.646 [Google Scholar] [CrossRef]
6. Akpan NP, Agadaga GO. Modelling building renovation using pert. Asian Res J Math. 2020;16(4):25–38. doi:10.9734/arjom/2020/v16i430184. [Google Scholar] [CrossRef]
7. Hajdu M, Bokor O. The effects of different activity distributions on project duration in pert networks. Procedia-Social and Behav Sci. 2014;119(19):766–75. doi:10.1016/j.sbspro.2014.03.086. [Google Scholar] [CrossRef]
8. Shah A. PERT vs. CPM: a cross review analysis. Int J Social Impact. 2021;6(1):33–43. [Google Scholar]
9. Habibi F, Birgani OT, Koppelaar H, Radenovic S. Using fuzzy logic to improve the project time and cost estimation based on project evaluation and review technique (PERT). J Project Manag. 2018;3(4):183–96. doi:10.5267/j.jpm.2018.4.002. [Google Scholar] [CrossRef]
10. Yuliarty P, Novia Nila S, Anggraini R. Construction service project scheduling analysis using critical path method (CPMproject evaluation and review technique (PERT). Int J Innov Sci Res Technol. 2021;6(2):477–80. [Google Scholar]
11. Zadeh LA. Fuzzy sets. Inf Control. 1965;8(3):338–53. doi:10.1016/S0019-9958(65)90241-X. [Google Scholar] [CrossRef]
12. Wan SP, Dong JY, Chen SM. A novel intuitionistic fuzzy best-worst method for group decision making with intuitionistic fuzzy preference relations. Inf Sci. 2024;666(6):120404. doi:10.1016/j.ins.2024.120404. [Google Scholar] [CrossRef]
13. Yen KK, Ghoshray S, Roig G. A linear regression model using triangular fuzzy number coefficients. Fuzzy Sets Syst. 1999;106(2):167–77. doi:10.1016/S0165-0114(97)00269-8. [Google Scholar] [CrossRef]
14. Rezvani S. Ranking method of trapezoidal intuitionistic fuzzy numbers. Annals of Fuzzy Math Inform. 2013;5(3):515–23. [Google Scholar]
15. Rameshan N, Dinagar DS. A method for finding critical path with symmetric octagonal intuitionistic fuzzy numbers. Adv Math: Sci J. 2020;9(11):9273–86. [Google Scholar]
16. Khalifa HAE, Alharbi MG, Kumar P. On determining the critical path of activity network with normalized heptagonal fuzzy data. Wirel Commun Mob Comput. 2021;2021(8):1–14. doi:10.1155/2021/6699403. [Google Scholar] [CrossRef]
17. Revathi M, Valliathal M. Comparative analysis of fuzzy critical path method in agriculture project management. Int J Inform & Manag Sci. 2021;32(1):1–20 [Google Scholar]
18. Mehlawat MK, Grover N. Intuitionistic fuzzy multi-criteria group decision making with an application to critical path selection. Ann Oper Res. 2018;269(1–2):505–20. doi:10.1007/s10479-017-2477-4. [Google Scholar] [CrossRef]
19. Senussi GH, Benisa MM, Aswihli HA, Elmabruk OM. Project scheduling using fuzzy logic approach to critical path analysis. J Academic Res (Appl Sci). 2022;22:7–12. [Google Scholar]
20. Ganesan S, Kandasamy G. Using interval parameters for latest start time and mission floats operation networks. Math Model Eng Prob. 2023;10(2):687–94. doi:10.18280/mmep.100240. [Google Scholar] [CrossRef]
21. Shafi SP, Edalatpanah SA. Supplier selection using fuzzy ahp method and d-numbers. J Fuzzy Exten Appl. 2020;1(1):1–14. doi:10.22105/jfea.2020.248437.1007. [Google Scholar] [CrossRef]
22. Kane L, Diakite M, Kane S, Bado H, Konate M, Traore K. A new algorithm for fuzzy transportation problems with trapezoidal fuzzy numbers under fuzzy circumstances. J Fuzzy Exten Appl. 2021;2(3):204–25. doi:10.22105/jfea.2021.287198.1148. [Google Scholar] [CrossRef]
23. Smarandache F. A unifying field in logics. Neutrosophy: neutrosophic probability, set and logic. Rehoboth, Delaware: American Research Press; 1999. [Google Scholar]
24. Wang H, Smarandache F, Zhang Y, Sunderraman R. Single valued neutrosophic sets. Inf Study. 2010;12:410–3. [Google Scholar]
25. Chakraborty A, Mondal SP, Ahmadian A, Senu N, Alam S, Salahshour S. Different forms of triangular neutrosophic numbers, de-neutrosophication techniques, and their applications. Symmetry. 2018;10(8):327. doi:10.3390/sym10080327. [Google Scholar] [CrossRef]
26. Chakraborty A, Mondal SP, Mahata A, Alam S. Different linear and non-linear form of trapezoidal neutrosophic numbers, de-neutrosophication techniques and its application in time-cost optimization technique, sequencing problem. Rairo-Operations Res. 2021;55:S97–118. doi:10.1051/ro/2019090. [Google Scholar] [CrossRef]
27. Fernandez AR, Rosales LVM, Paspuel OGA, Lopez WBJ, Leon ARS. Neutrosophic statistics for project management. application to a computer system project. Neutrosophic Sets and Syst. 2021;44:308–14. [Google Scholar]
28. Abdel-Basset M, Atef A, Abouhawwash M, Nam Y, AbdelAziz NM. Network analysis for projects with high risk levels in uncertain environments. Comput Mater Contin. 2021;70(1):1281–96. doi:10.32604/cmc.2022.018947 [Google Scholar] [CrossRef]
29. Nagalakshmi T, Mishra JS. A comparative study of CPM analysis in the fuzzy and neutrosophic environment. In: Recent trends in computational intelligence and its application. London: CRC Press; 2023. p. 507–14. doi:10.1201/9781003388913-67. [Google Scholar] [CrossRef]
30. Priyadharsini S, Kungumaraj E, Santhi R. An evaluation of triangular neutrosophic pert analysis for real-life project time and cost estimation. Neutrosophic Sets and Syst. 2024;63(1):5. [Google Scholar]
31. Basha AM, Jabarulla MM, Broumi S. Neutrosophic pythagorean fuzzy shortest path in a network. J Neutrosophic and Fuzzy Syst. 2023;6(1):21–8. doi:10.54216/JNFS.060103. [Google Scholar] [CrossRef]
32. Adhikary K, Pal P, Poray J. The minimum spanning tree problem on networks with neutrosophic numbers. Neutrosophic Sets and Syst. 2024;63(1):259–70. [Google Scholar]
33. Nagarajan D, Kanchana A, Jacob K, Kausar N, Edalatpanah SA, Shah MA. A novel approach based on neutrosophic bonferroni mean operator of trapezoidal and triangular neutrosophic interval environments in multi-attribute group decision making. Sci Rep. 2023;13(1):1–11. doi:10.1038/s41598-023-37497-z. [Google Scholar] [PubMed] [CrossRef]
34. Edalatpanah SA. A nonlinear approach for neutrosophic linear programming. J Appl Res Industrial Eng. 2019;6(4):367–73. doi:10.22105/jarie.2020.217904.1137. [Google Scholar] [CrossRef]
35. Kandasamy I, Arumugam D, Rathore A, Arun A, Jain M, Vasanth WB, et al. NCMPy: a modelling software for neutrosophic cognitive maps based on python package. Neutrosophic Syst Appl. 2023;13:1–22. doi:10.61356/j.nswa.2024.114. [Google Scholar] [CrossRef]
36. El-Ghareeb HA. Novel open source python neutrosophic package. Neutrosophic Sets and Syst. 2019;25:136–60. doi:10.5281/zenodo.2631514. [Google Scholar] [CrossRef]
37. Deli I. A novel defuzzification method of SV-trapezoidal neutrosophic numbers and multi-attribute decision making: a comparative analysis. Soft Comput. 2019;23:12529–45. doi:10.1007/s00500-019-03803-z. [Google Scholar] [CrossRef]
38. Abdel-Basset M, Mohamed M, Smarandache F. Linear fractional programming based on triangular neutrosophic numbers. Int J Appl Manag Sci. 2019;11(1):1–20. doi:10.1504/IJAMS.2019.096652 [Google Scholar] [CrossRef]
39. Rusu A. The use of triangular fuzzy numbers in fuzzy analysis of critical paths in project planning. Int J Construct Mach. 2018;64(68):17–24. [Google Scholar]
40. Elizabeth S, Abirami M, Sujatha L. Finding critical path in a project network under fuzzy environment. Math Sci Int Res J. 2016;5:31–6. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools