
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Generalized nth-Order Perturbation Method Based on Loop Subdivision Surface Boundary Element Method for Three-Dimensional Broadband Structural Acoustic Uncertainty Analysis
1 College of Architecture and Civil Engineering, Xinyang Normal University, Xinyang, 464000, China
2 Henan Unsaturated Soil and Special Soil Engineering Technology Research Center, Xinyang Normal University, Xinyang, 464000, China
3 Henan International Joint Laboratory of Structural Mechanics and Computational Simulation, College of Architecture and Civil Engineering, Huanghuai University, Zhumadian, 463000, China
* Corresponding Author: Xiaohui Yuan. Email:
(This article belongs to the Special Issue: Integration of Physical Simulation and Machine Learning in Digital Twin and Virtual Reality)
Computer Modeling in Engineering & Sciences 2024, 140(2), 2053-2077. https://doi.org/10.32604/cmes.2024.049185
Received 29 December 2023; Accepted 23 February 2024; Issue published 20 May 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In this paper, a generalized th-order perturbation method based on the isogeometric boundary element method is proposed for the uncertainty analysis of broadband structural acoustic scattering problems. The Burton-Miller method is employed to solve the problem of non-unique solutions that may be encountered in the external acoustic field, and the th-order discretization formulation of the boundary integral equation is derived. In addition, the computation of loop subdivision surfaces and the subdivision rules are introduced. In order to confirm the effectiveness of the algorithm, the computed results are contrasted and analyzed with the results under Monte Carlo simulations (MCs) through several numerical examples.Keywords
In many engineering problems [1–5], there is an increasing focus on the consideration of uncertainty. The problem of uncertainty in stochastic data occurs frequently in engineering practice, especially when some parameters are derived from field measurements or laboratories, and the modeled engineering system’s final stochastic response is influenced by the statistical estimates of these parameters. To ascertain how input probabilistic properties affect an engineering system’s final stochastic response, several uncertainty analysis techniques have been proposed, such as stochastic spectral methods [6,7], Monte Carlo simulations (MCs) [8–11], and perturbation techniques [12–16]. Among all the stochastic approaches, MCs is the most straightforward and comprehensive probabilistic technique and is widely employed across diverse academic fields [17]. Although MCs is computationally expensive, it remains the most reliable and stable simulation technique compared to other probabilistic methods, which is often used as a reference solution [18,19]. The generalized
Hughes et al. [27] proposed isogeometric analysis (IGA), which is a novel spline theory-based numerical computation technique. IGA makes acoustic boundary element simulation calculations more convenient, accurate, and high precision. The method can directly analyze the CAD model without additional meshing, which reduces the discretization error of the model and also speeds up the calculation [28–30]. It uses non-uniform rational b-splines (NURBS) [31–33] and t-splines [34,35] instead of conventional finite elements. Without altering the geometry, we can increase the simulation’s accuracy by applying h- and refinements. To facilitate more versatile geometric representations in design, IGA has integrated t-splines, which feature t-joints and enable local refinement into the analysis [36–38]. Surface subdivision is a potent surface design technique, with a straightforward refinement procedure, which can effectively produce smooth surfaces from any original mesh. Catmull et al. [39] first proposed a mode of subdivision surfaces in 1978, which is a quadrilateral split to generate a cubic B-spline surface, and Loop [40] first proposed a basic triangle-based subdivision mode in 1987, which did a generalization of the box spline. Subdivided surfaces are compatible with NURBS as a standard for CAD systems and enable refinement of B-spline methods. Subdivision techniques are now widely used in modeling applications [41–45].
The boundary element method is extremely attractive when waves propagate in an infinite domain [46–50]. BEM is an important numerical method in acoustics [51–54], and is also widely used in other scientific and engineering fields. It is popular in the analysis of external acoustic fields due to its advantages, such as reduced dimensional computation and high analytical accuracy, and the boundary element method requires only a discrete boundary and, at the same time completely satisfies the radiation conditions at the infinity. Combined with the well-known Burton-Miller method [55,56], the capability of acoustic boundary elements is further improved and the problem of non-uniqueness of solutions is avoided successfully when using BEM to analyze the external sound field problem. However, the conventional BEM cannot be used in large-scale problems because the coefficient matrices formed are dense matrices with high memory requirements. Fortunately, the boundary element coefficient matrix, although dense, has the property of chunked low rank, and a series of fast methods using low-rank decompositions have been proposed, including fast multipole method [57,58], adaptive cross approximation [59,60], and other fast methods [61,62], which have successfully reduced computation and memory usage, and made it possible for boundary element method to serve complex engineering problems.
In recent years, more scholars have investigated the application of isogeometric boundary elements in some practical acoustic engineering problems. Venås et al. [63] investigated the approximation of isogeometric boundary elements for the 3D acoustic scattering problem and built a BeTSSi submarine model by combining parametric surfaces with NURBS. Chen et al. [64] simulated acoustic wave propagation in a semi-infinite space by combining the Catmull-Clark subdivision surface method in 3D computer graphics with isogeometric boundary elements. Wu et al. [65] developed an isogeometric indirect boundary element based on NURBS to analyze 3D acoustic problems and combined polynomials splines over hierarchical T-meshes with indirect boundary element for the first time. The isogeometric boundary element method (IGABEM) has also been widely used in the analysis of problems in potential [66–70], elastodynamics [71–75] and acoustic structural optimization [76–79]. A very important index of the acoustic boundary element is that it has frequency dependence, the response of the whole system is frequency-dependent, and in the real environment, the excitation load is broad frequency, not single frequency. Therefore, in this paper, we consider the stochastic analysis of the acoustic boundary element with the frequency change and use the generalized
The rest of the paper is structured as follows. Section 2 introduces the theoretical aspects of the generalized
2 Theoretical Aspects of the Generalized nth-Order Perturbation Method
In a general stochasticity analysis, a group of random fields
and,
where
The stochastic perturbation method’s fundamental concept is to use the small parameter
where
Next, replace
The perturbation parameter
Considering the various probability distributions, one can note the essential difference between the symmetric and asymmetric distribution functions, where the symmetric distribution function ignores the odd-order terms in the Taylor expansion, and Eq. (5) can be written as
The asymmetric probability density function can be described as
In both situations, the quantities of natural numbers A and N must ensure that the additional probability moments have a satisfactory approximation accuracy. The following statistical error measures for variance and expectation can be introduced. For the expectations:
For the variance:
The positive numbers
together with
where A is a very large number denoting the total number of randomized trials used to compute the estimate of the random function
Assuming that the PDF is a symmetric distribution function, the state function
where
If greater accuracy is employed, higher-order expansion terms are required, and the expansion for an eighth-order perturbation can be described as
where
The sixth-order expression for the variance of the state function
In this paper, we also consider the
The method can also be applied to approximate formulas for expectation and variance with multiple variables. The
3 Isogeometric Boundary Element Method with Loop Subdivision Surface for 3D Problems
For frequency-domain acoustic problems, the system response has a certain frequency dependence. In the real environment, the excitation load is a broadband excitation, which is a range rather than a definite value. Therefore, in this paper, the
Subdivided surfaces are based on an initial control mesh and certain subdivision rules, and can be constructed from an initial control mesh of any topology. This avoids the geometric errors introduced by the traditional parametric surface modeling of cutting and splicing when constructing complex free-surface models, and subdivided surfaces are favored because of their greater flexibility. The loop subdivision provides more smooth and continuous surfaces with good adaptability to complex shapes, while the meshfree approach [81,82] applies to arbitrary shapes and topologies, and can handle a variety of complex geometries and irregular meshes, the combination of which enables better handling of complex geometries and improves the accuracy of the computational results. We plan to further explore this approach in the future.
For the initial control mesh, some subdivision rules are used to insert new vertices into the mesh, and then a new mesh is obtained by connecting the new vertices to the old vertices according to some topological rules. The subdivision rules are applied repeatedly, and in the limit, the mesh eventually converges to a smooth surface. In practice, the mesh is subdivided to the extent that the surface is considered smooth and is no longer subdivided. While the Loop subdivision [40] is an approximate subdivision method, it is the first proposed subdivision method based on the triangle mesh, which is a generalization of the box spline. By inserting new vertices on the edges of the triangle mesh and connecting them two by two, the triangle can be divided into four smaller triangles, and with each subdivision, the number of triangles will be increased to a fourth of the initial amount.
The amount of edges that are directly related to a vertex is known as its valence. Vertices are further categorized into regular vertex and extraordinary vertex. In triangular mesh, regular points are internal vertices with a valence of
where
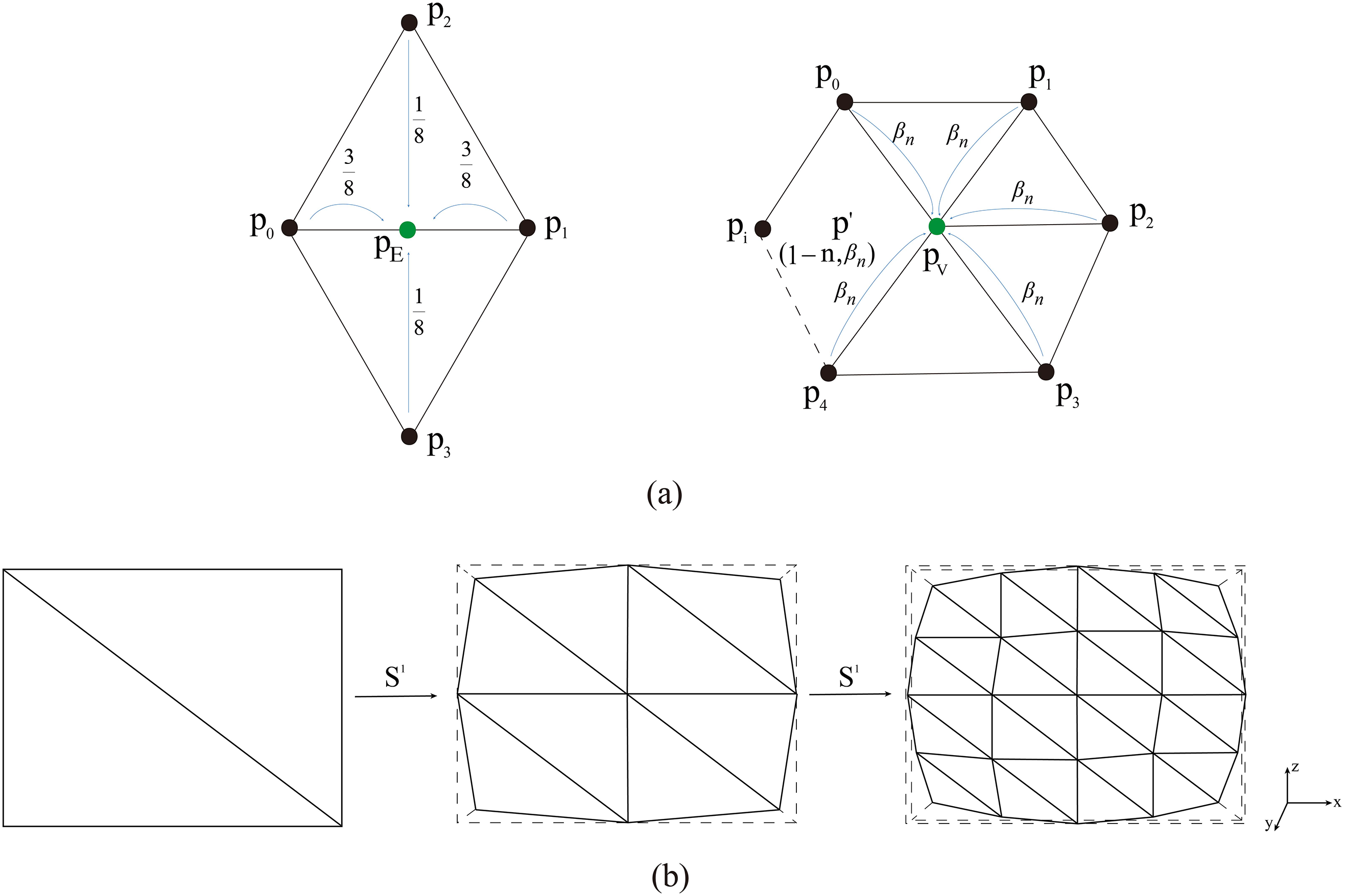
Figure 1: (a) Loop subdivision surface calculation template; (b) Loop subdivision topology rules
From Eq. (18), the point V can be obtained by weighted summation of the original vertex and the vertices in its neighborhood.
3.1.2 Calculation of Loop Subdivision Surfaces
A triangular patch is a regular cell if its three control points have valence
where
A triangular patch that has at least one control point with the valence is
3.2 IGABEM for Acoustic Problems
The Kirchhoff-Helmholtz conventional boundary integral equation (CBIE) can be written as
where point
Consider that Eq. (21) will have spurious frequencies when solving the external sound field problem, thus leading to a non-unique solution. We use the Burton-Miller method to resolve the unique solution of the exterior acoustic problem, and the new boundary integral equation is obtained by taking a partial derivation of the conventional boundary integral equation concerning the direction of the exterior normal of the source point, described as follows:
Because of the presence of super-singular integrals in Eq. (22), the equation is known as the Hyper-singular boundary integral equation. The existence of singular integrals makes it difficult to obtain an exact solution to the above equations when we solve them directly by Gaussian integration. These singular integrals require special treatment, and the singular phase elimination technique is usually accustomed to solving the singular integrals exactly [83].
The kernel function of each order for the 3D acoustic problem is:
where
Combining Eqs. (21) and (22), the Burton-Miller formula can be as follows:
where
where
In order to overcome the problem of low computational accuracy in the calculation of the traditional approximate geometric model of the Lagrangian function with physical field interpolation, in this research, the geometric model is built by using the loop subdivision surface, and the boundaries in the discretization Eq. (24) are formed into some elements as described below:
where
In fact, by fitting all levels of subdivision meshes, we can obtain the same surface model, which is consistent with the limits of the subdivision surface. Consequently, we do not need to perform the numerical computation of the limit subdivision mesh level in the numerical computational analysis; instead, we only need to select the suitable level of subdivision meshes. The field points have local coordinates
where
By substituting Eq. (27) into Eq. (24), the
where
In order to create a system of equations using the boundary element approach, the same amount of boundary integral equations must be created as the amount of control points. By the resolution of this system of equations, we can derive unknown nodal solutions. Here, we use a configuration scheme to produce a system of equations. Given an element
The amount of configuration points is the same as the number of vertices, but the control vertices and configuration points do not overlap. Then, interpolation operations are performed in the elements of the corresponding regular patches or irregular parameters to acquire the coordinates of the configuration points. Finally, the equations of all configuration points are collected and represented in matrix form, the system of linear algebraic equations that follows:
Then, the field vector
3.3 Generalized nth-Order Perturbation
In this paper, the wave number
Then, the different order expansions of the boundary integral equation of Eq. (24) are denoted as
• The zeroth-order equation is given by
• The
In order to obtain a direct expression for the derivative of the kernel function at
3.3.1 Discrete Boundary Integral Equations
The sound pressure and sound pressure flux at the boundary of Eq. (24) are interpolated using the subdivision surface basis functions in the following way, applying the idea of IGA.
where
Substituting Eq. (35) into Eq. (33), the nth-order derivative discretization formula for the boundary integral equation can be described as
where
Due to the presence of control points, the construction of the system of equations using the boundary element method requires the construction of boundary integral equations equal to the number of control points, and then by resolving this system of equations, the results of the unestablished nodes can be obtained. In this background, this paper constructs a set of configuration points, given an element
The coordinates of the configuration points can be ascertained by performing interpolation operations on the relevant elements with regular or irregular patches. Then the discretization of the boundary integral equation with
• The zeroth-order linear system of equation is given by
• The first-order linear system of equation is defined by
• The
With the boundary conditions applied and terms rearranged, the equation system can be written as follows:
where matrix
The consequence of field vector
In this section, we investigate the precision and effectiveness of the proposed algorithm through two numerical examples. The code was written in Fortran 90 programming language and run on a personal PC side computer with a processor of i7-8700 CPU and this research compared the expected value and standard deviation with the results of Monte Carlo simulations.
The first numerical example is the spherical model, as seen in Fig. 2, with a sphere of radius
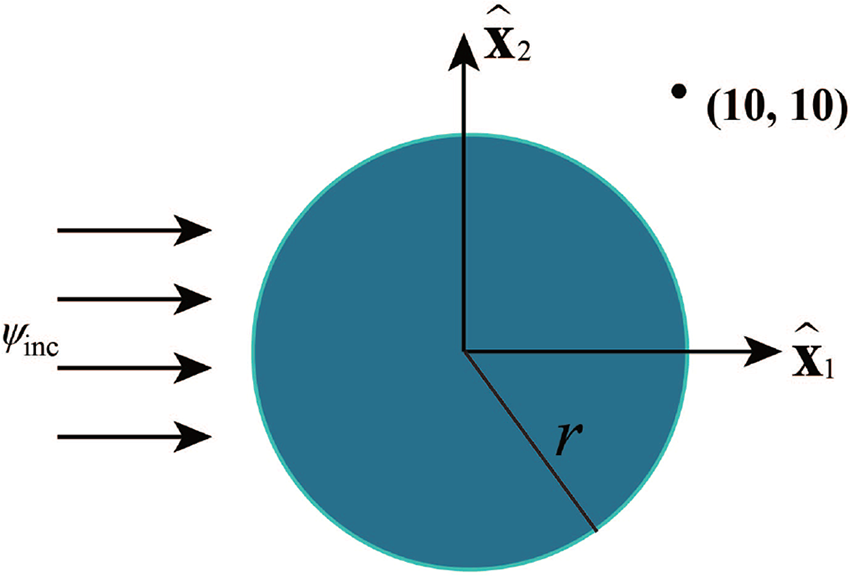
Figure 2: Illustration of the scattering process of an infinite sphere model
In this research, the numerical and analytical solutions for the real, imaginary and amplitude parts of the acoustics pressure located at the test points (10, 10, 10 m) at a range of frequencies are analyzed and are displayed in Fig. 3. For numerical computations, we employed two distinct forms of boundary integral equations: the conventional boundary integral equation provided by Eq. (21), and the combined Burton-Miller boundary integral equation (BM) provided by Eq. (24). As observed in Fig. 3, the numerical results based on CBIE exhibit a little deviation from the analytical solution at some frequencies, whereas the numerical results based on BM show a greater agreement with the analytical solution at all frequencies. The frequencies that do not match accurately are called fictitious feature frequencies, which is a problem encountered in analyzing external sound problems and is not an inherent property of the arithmetic model. We can see that the results match well using these two types of numerical calculation methods, which verifies the precision and effectiveness of the IGABEM algorithm proposed in this paper.
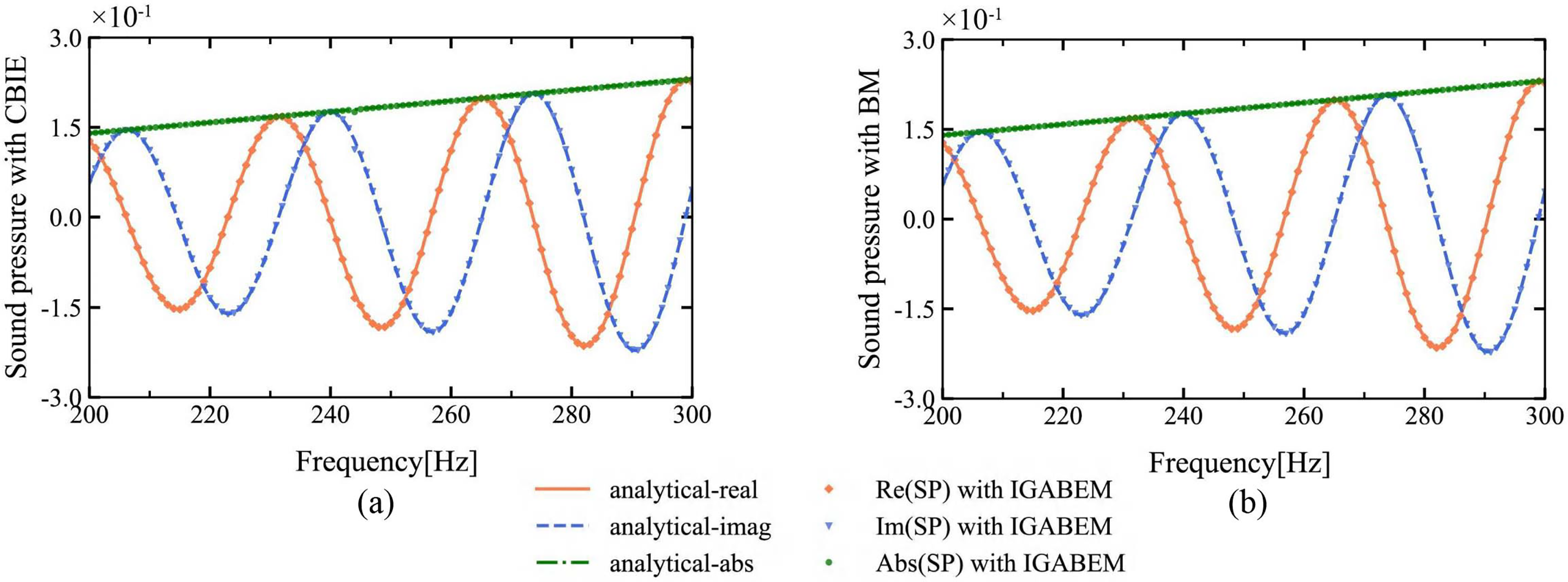
Figure 3: (a) Sound pressure with CBIE; (b) Sound pressure with BM
To directly confirm if the algorithm is accurate, we investigated the amplitude, real and imaginary distributions of the sound pressure on the limiting smooth surface of the sphere model at incident frequencies of 100, 200, and 300 Hz, as shown in Fig. 4. From the figure, it can be noticed that the amplitude part, real part, and imaginary part of the acoustics pressure also show good symmetry, and the higher the incident frequency of the incident wave, the more complex the distribution of the field function and the larger the amplitude of the sound pressure, which depicts that the sound pressure increases as the frequency increases. In conclusion, the results confirm the precision of the proposed algorithm.
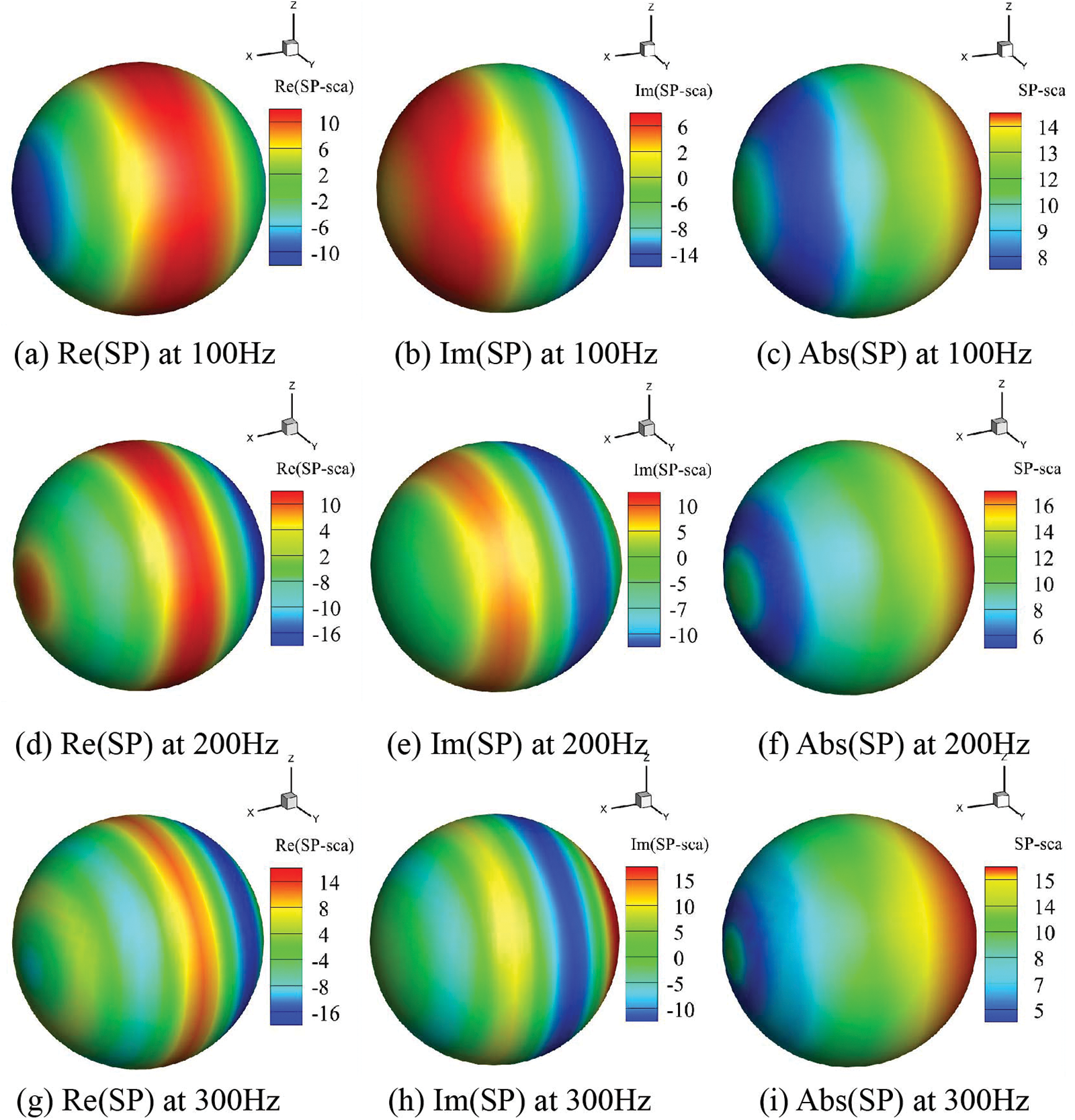
Figure 4: Sound pressure distribution on smooth surfaces in the limit of spherical models
Next, we analyze the uncertainty of the limit smooth sphere model using the generalized
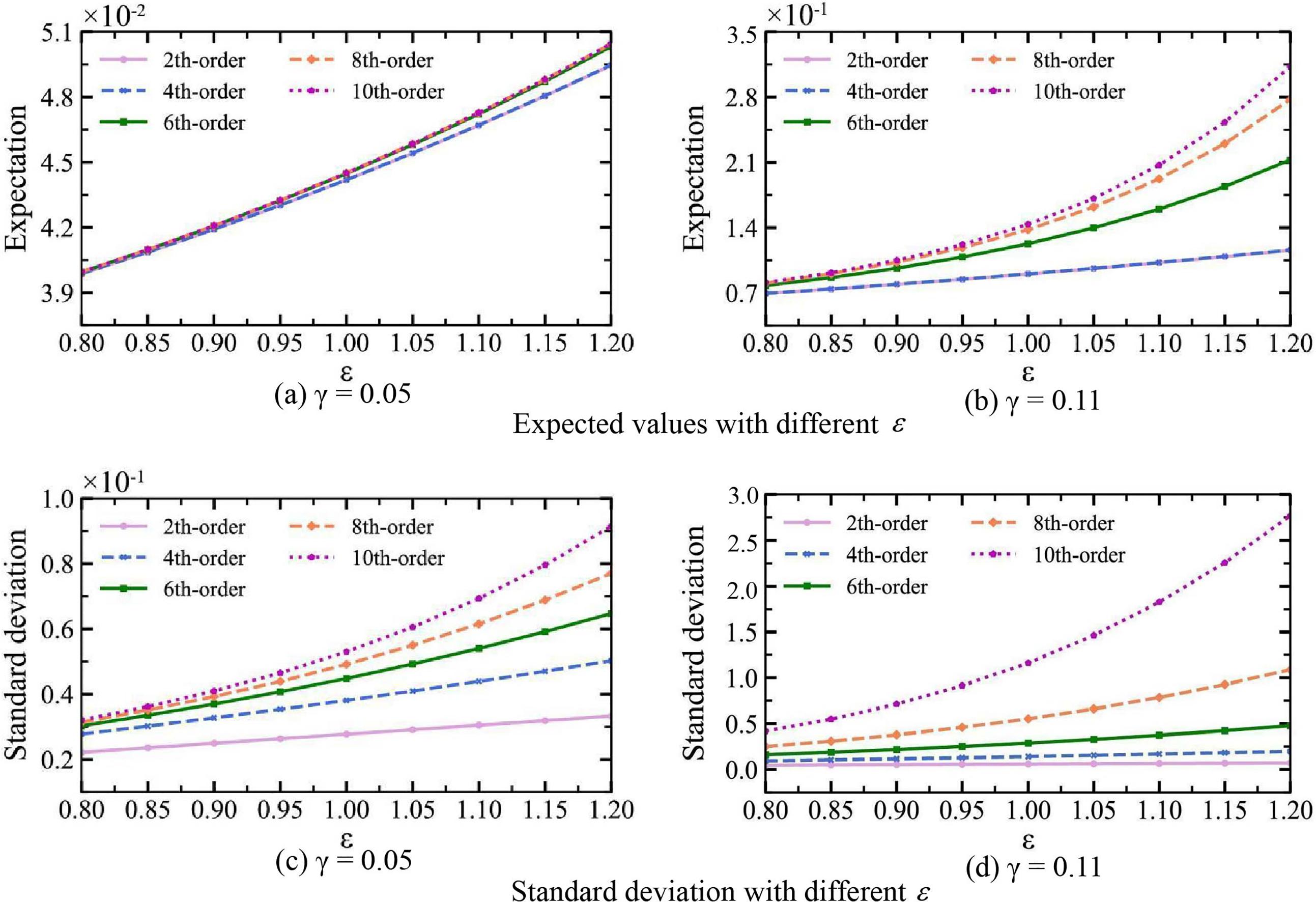
Figure 5: Expected values used
To analyze the generalized
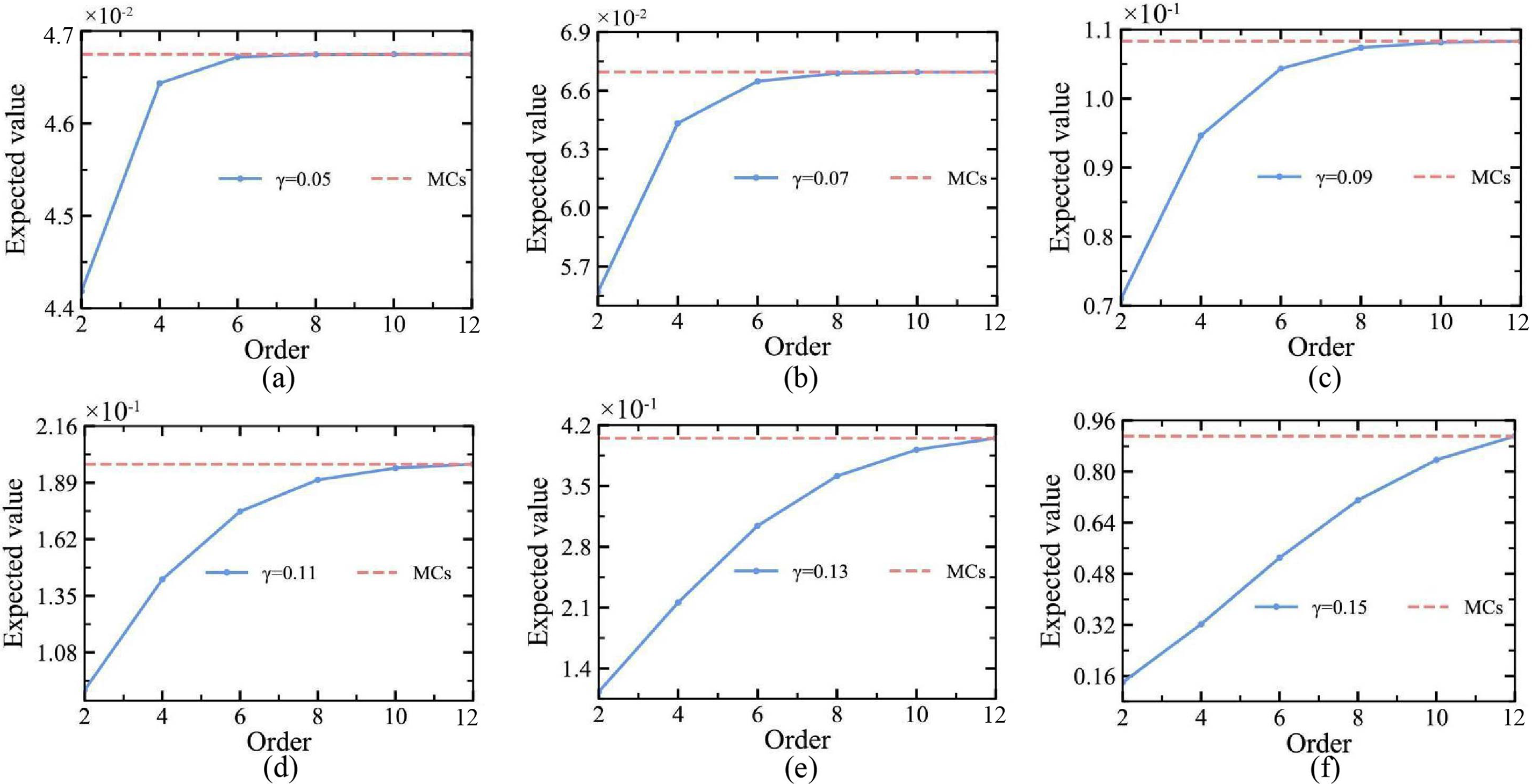
Figure 6: Expexted value results for different variation coefficients: (a)
The second numerical example model is a manta ray model with limiting smoothness. We consider a manta ray model with Neumann boundary conditions and analyze it under the action of plane waves. The amplitude of the plane wave is
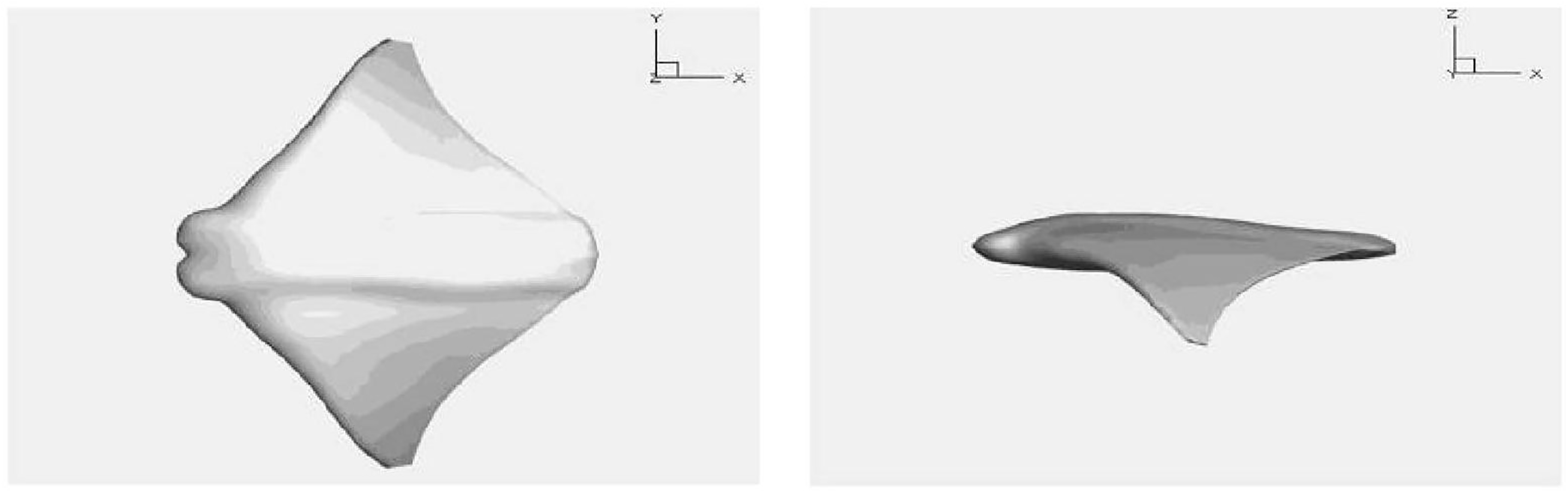
Figure 7: 3D solid modeling of the manta ray
We use the generalized
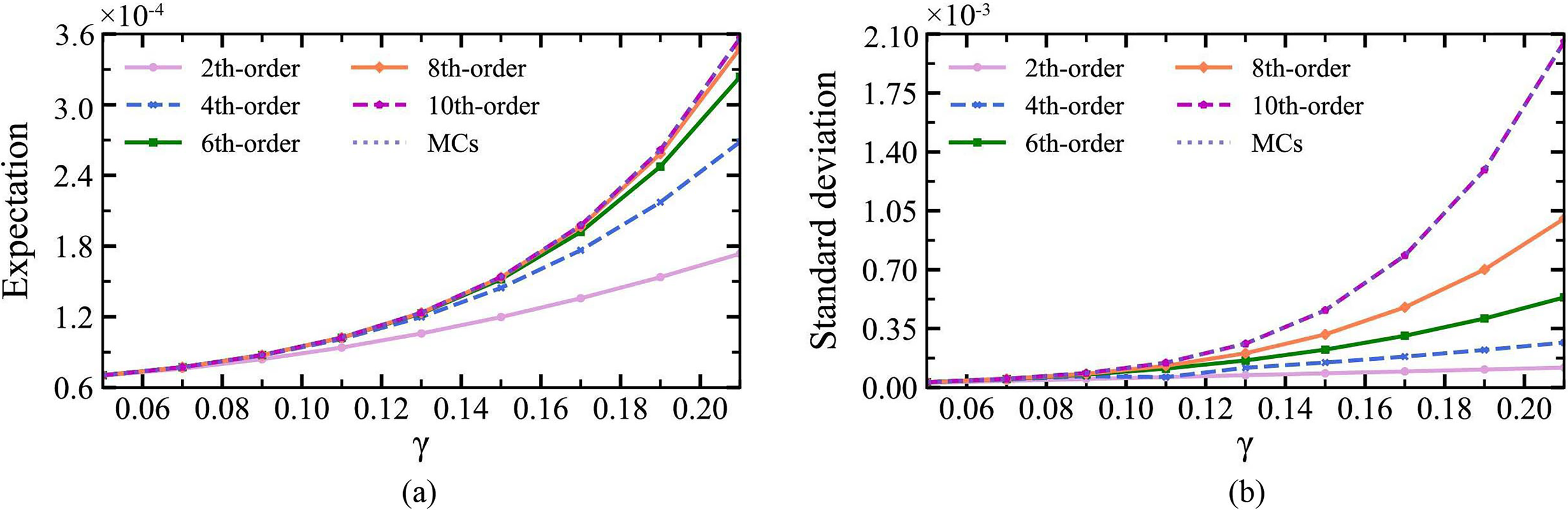
Figure 8: Expectation and standard deviation under different coefficients of variation under the perturbation method vs. results under MCs
To more naturally confirm that the method is exact, we investigated the distribution of the derivatives of the field function on the limit smooth surface of the manta ray model and analyzed the cloud distribution of the
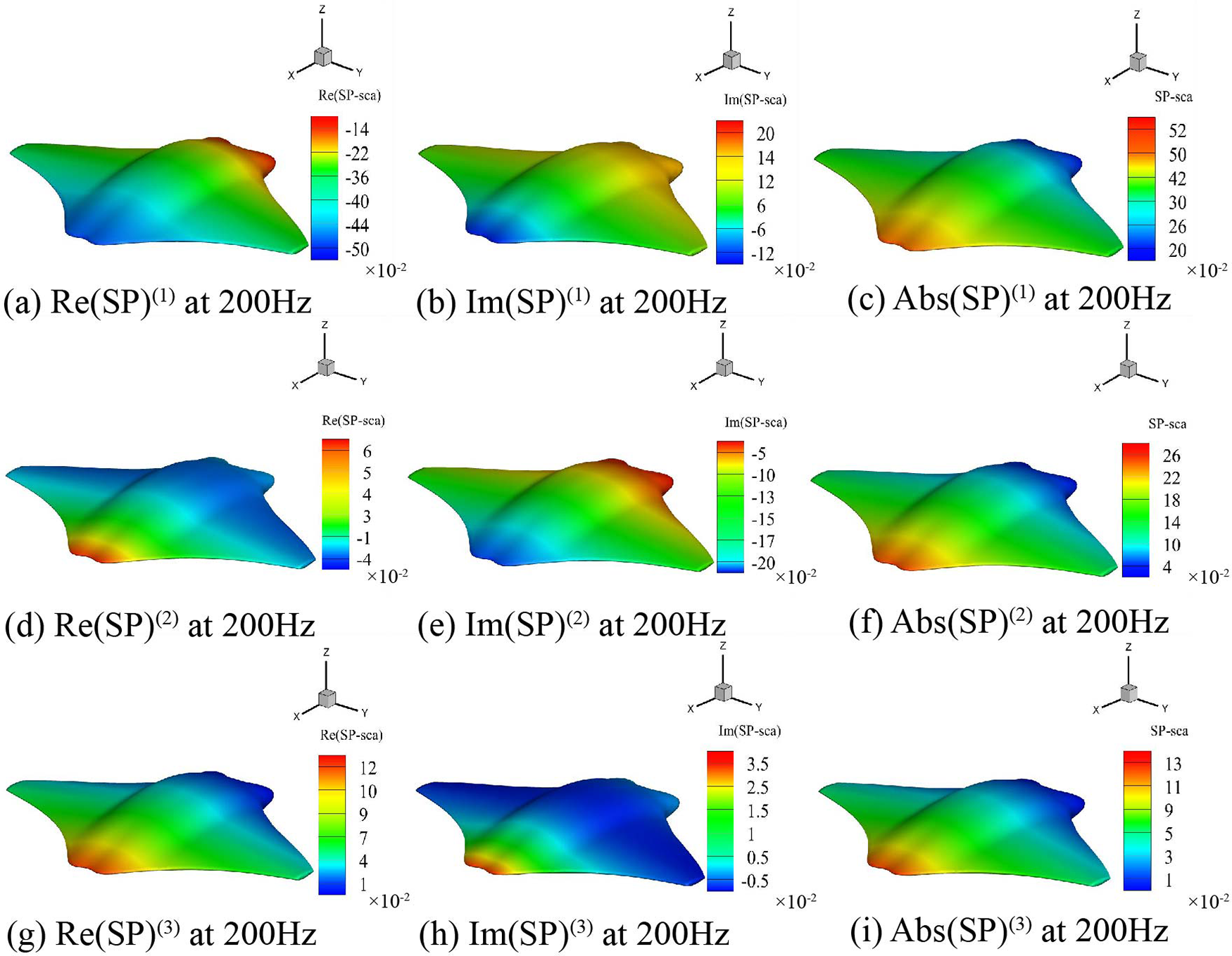
Figure 9: The 1st–3rd order derivatives of the field function of the manta ray model at an incident frequency of 200 Hz
In order to verify the reliability and applicability of the generalized
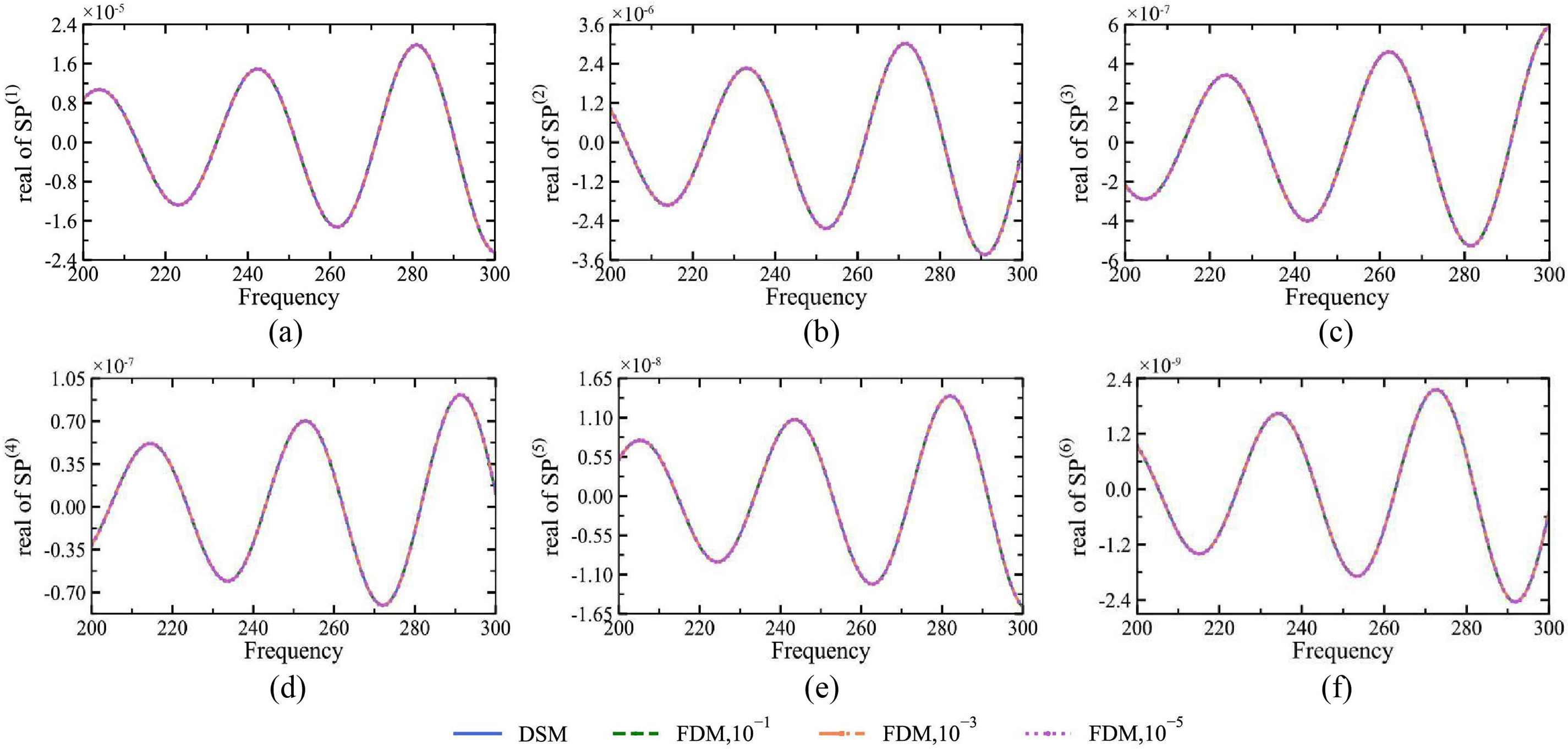
Figure 10: The
where
From Fig. 10, it can be found that the results under DSM and FDM have similar numerical trend and change rule in the same position, and the value of the field function’s derivative reduces with the increase of the order under a certain frequency. Besides, the result of the derivative under DSM is very close to the result of FDM, meanwhile, these two methods remain stable throughout the whole computational region without any anomaly or divergence, which indicates that these two methods are consistent and accurate in the calculation of the derivatives. In summary, the reliability and validity of the proposed algorithm is further confirmed by comparing the derivatives of the real part of the field function computed by DSM and FDM.
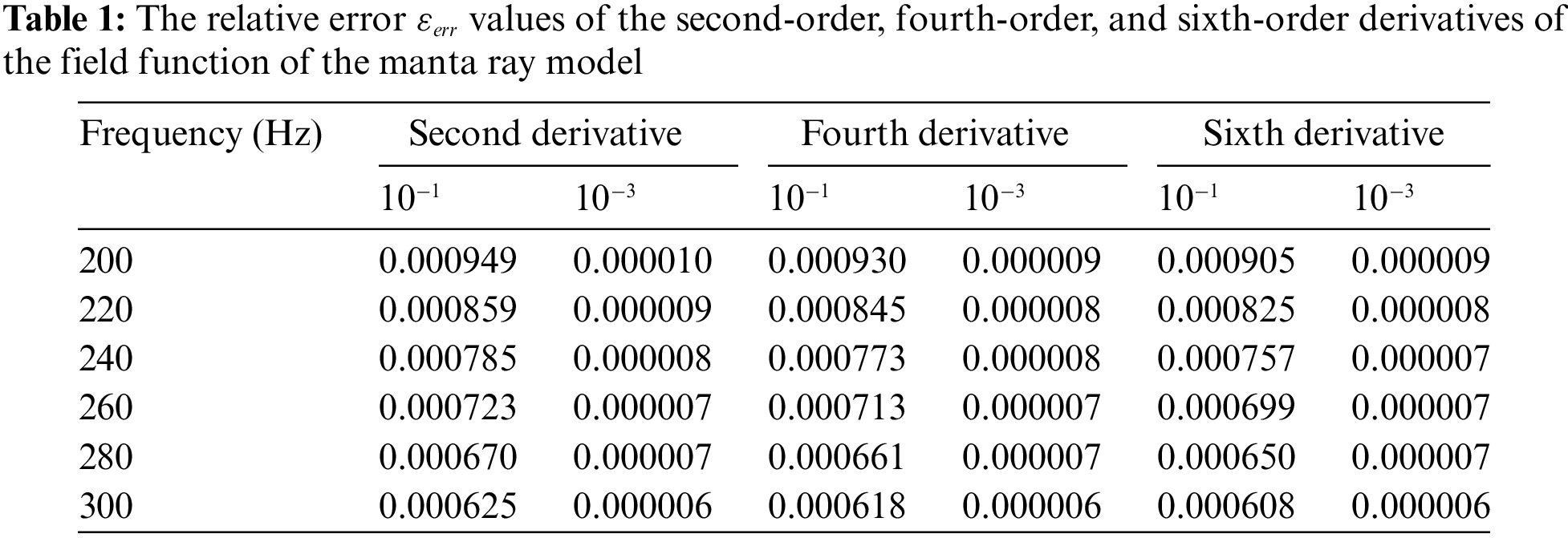
To further analyze the precision of DSM and FDM, this paper compares the field function derivative error values
In this work, a generalized
Acknowledgement: The authors wish to express their appreciation to the reviewers for their helpful suggestions which greatly improved the presentation of this paper.
Funding Statement: This paper was sponsored by the Graduate Student Research and Innovation Fund of Xinyang Normal University under No. 2024KYJJ012.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Ruijin Huo, Xiaohui Yuan; data collection: Ruijin Huo; analysis and interpretation of results: Ruijin Huo, Qiangxiang Pei, Xiaohui Yuan; draft manuscript preparation: Ruijin Huo, Yanming Xu. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: None.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Chen, L., Lian, H., Xu, Y., Li, S., Liu, Z. et al. (2023). Generalized isogeometric boundary element method for uncertainty analysis of time-harmonic wave propagation in infinite domains. Applied Mathematical Modelling, 114, 360–378. https://doi.org/10.1016/j.apm.2022.09.030 [Google Scholar] [CrossRef]
2. Lian, H., Chen, L., Lin, X., Zhao, W., Bordas, S. P. A. et al. (2022). Noise pollution reduction through a novel optimization procedure in passive control methods. Computer Modeling in Engineering & Sciences, 131(1), 1–18. http://dx.doi.org/10.32604/cmes.2022.019705 [Google Scholar] [CrossRef]
3. Riaz, M., Hashmi, M. R., Pamucar, D., Chu, Y. (2021). Spherical linear diophantine fuzzy sets with modeling uncertainties in MCDM. Computer Modeling in Engineering & Sciences, 126(3), 1125–1164. https://doi.org/10.32604/cmes.2021.013699 [Google Scholar] [CrossRef]
4. Cao, G., Yu, B., Chen, L., Yao, W. (2023). Isogeometric dual reciprocity BEM for solving non-fourier transient heat transfer problems in FGMs with uncertainty analysis. International Journal of Heat and Mass Transfer, 203, 123783. https://doi.org/10.1016/j.ijheatmasstransfer.2022.123783 [Google Scholar] [CrossRef]
5. Ryba, T., Rucki, M., Siemiatkowski, Z., Bzinkowski, D., Solecki, M. (2022). Design and calibration of the system supervising belt tension and wear in an industrial feeder. Facta Universitatis, Series: Mechanical Engineering, 20(1), 167–176. https://doi.org/10.22190/FUME201004026R [Google Scholar] [CrossRef]
6. Le Maître, O., Knio, O. M. (2010). Spectral methods for uncertainty quantification: with applications to computational fluid dynamics. New York: Springer Science & Business Media. [Google Scholar]
7. Abdulle, A., Pavliotis, G. A., Vaes, U. (2016). Spectral methods for multiscale stochastic differential equations. SIAM/ASA Journal on Uncertainty Quantification, 5, 720–761. [Google Scholar]
8. Shen, X., Du, C., Jiang, S., Zhang, P., Chen, L. (2024). Multivariate uncertainty analysis of fracture problems through model order reduction accelerated sbfem. Applied Mathematical Modelling, 125, 218–240. https://doi.org/10.1016/j.apm.2023.08.040 [Google Scholar] [CrossRef]
9. Shen, X., Du, C., Jiang, S., Sun, L., Chen, L. (2023). Enhancing deep neural networks for multivariate uncertainty analysis of cracked structures by POD-RBF. Theoretical and Applied Fracture Mechanics, 125, 103925. https://doi.org/10.1016/j.tafmec.2023.103925 [Google Scholar] [CrossRef]
10. Binder, K. (2022). Monte carlo simulations in statistical physics. In: Statistical and nonlinear physics, pp. 85–97. New York, NY: Springer. [Google Scholar]
11. Xu, Y., Li, H., Chen, L., Zhao, J., Zhang, X. (2022). Monte carlo based isogeometric stochastic finite element method for uncertainty quantization in vibration analysis of piezoelectric materials. Mathematics, 10(11), 1840. https://doi.org/10.3390/math10111840 [Google Scholar] [CrossRef]
12. Lagerstrom, P. A., Casten, R. (1972). Basic concepts underlying singular perturbation techniques. SIAM Review, 14(1), 63–120. https://doi.org/10.1137/1014002 [Google Scholar] [CrossRef]
13. Kokotović, P. V. (1984). Applications of singular perturbation techniques to control problems. SIAM Review, 26(4), 501–550. https://doi.org/10.1137/1026104 [Google Scholar] [CrossRef]
14. Kamiński, M. (2002). Stochastic perturbation approach to engineering structure vibrations by the finite difference method. Journal of Sound and Vibration, 251, 651–670. https://doi.org/10.1006/jsvi.2001.3850 [Google Scholar] [CrossRef]
15. Kamiński, M. (2006). On generalized stochastic perturbation-based finite elements. Communications in Numerical Methods in Engineering, 22(1), 23–31. https://doi.org/10.1002/cnm.v22:1 [Google Scholar] [CrossRef]
16. Chen, L., Cheng, R., Li, S., Lian, H., Zheng, C. et al. (2022). A sample-efficient deep learning method for multivariate uncertainty qualification of acoustic-vibration interaction problems. Computer Methods in Applied Mechanics and Engineering, 393, 114784. https://doi.org/10.1016/j.cma.2022.114784 [Google Scholar] [CrossRef]
17. Liu, K., Li, P., Wang, Z. (2021). Statistical modeling of random hail impact. Extreme Mechanics Letters, 48, 101374. https://doi.org/10.1016/j.eml.2021.101374 [Google Scholar] [CrossRef]
18. Chen, L., Lian, H., Natarajan, S., Zhao, W., Chen, X. et al. (2022). Multi-frequency acoustic topology optimization of sound-absorption materials with isogeometric boundary element methods accelerated by frequency-decoupling and model order reduction techniques. Computer Methods in Applied Mechanics and Engineering, 395, 114997. https://doi.org/10.1016/j.cma.2022.114997 [Google Scholar] [CrossRef]
19. Couto, P. R. G., Damasceno, J. C., Oliveira, S. D., Chan, W. (2013). Monte carlo simulations applied to uncertainty in measurement. Theory and Applications of Monte Carlo Simulations, 2, 27–51. [Google Scholar]
20. Kamiński, M. (2007). Application of the generalized perturbation-based stochastic boundary element method to the elastostatics. Engineering Analysis with Boundary Elements, 31(6), 514–527. https://doi.org/10.1016/j.enganabound.2006.10.005 [Google Scholar] [CrossRef]
21. Ding, C., Cui, X., Deokar, R. R., Li, G., Cai, Y. et al. (2018). Modeling and simulation of steady heat transfer analysis with material uncertainty: Generalized n th order perturbation isogeometric stochastic method. Numerical Heat Transfer, Part A: Applications, 74(9), 1565–1582. https://doi.org/10.1080/10407782.2018.1538296 [Google Scholar] [CrossRef]
22. Kamiński, M. (2010). Generalized stochastic perturbation technique in engineering computations. Mathematical and Computer Modelling, 51(3–4), 272–285. [Google Scholar]
23. Zhang, N., Yao, L., Jiang, G. (2020). A coupled finite element-least squares point interpolation/boundary element method for structure-acoustic system with stochastic perturbation method. Engineering Analysis with Boundary Elements, 119, 83–94. https://doi.org/10.1016/j.enganabound.2020.07.010 [Google Scholar] [CrossRef]
24. Hu, X., Cui, X., Feng, H., Li, G. (2016). Stochastic analysis using the generalized perturbation stable node-based smoothed finite element method. Engineering Analysis with Boundary Elements, 70, 40–55. https://doi.org/10.1016/j.enganabound.2016.06.002 [Google Scholar] [CrossRef]
25. Long, X., Jiang, C., Yang, C., Han, X., Gao, W. et al. (2016). A stochastic scaled boundary finite element method. Computer Methods in Applied Mechanics and Engineering, 308, 23–46. https://doi.org/10.1016/j.cma.2016.04.037 [Google Scholar] [CrossRef]
26. Liu, Z., Bian, P. L., Qu, Y., Huang, W., Chen, L. et al. (2024). A galerkin approach for analysing coupling effects in the piezoelectric semiconducting beams. European Journal of Mechanics–A/Solids, 103, 105145. https://doi.org/10.1016/j.euromechsol.2023.105145 [Google Scholar] [CrossRef]
27. Hughes, T. J., Cottrell, J. A., Bazilevs, Y. (2005). Isogeometric analysis: Cad, finite elements, nurbs, exact geometry and mesh refinement. Computer Methods in Applied Mechanics and Engineering, 194(39–41), 4135–4195. [Google Scholar]
28. Xue, Y., Jin, G., Ye, T., Shi, K., Zhong, S. et al. (2020). Isogeometric analysis for geometric modelling and acoustic attenuation performances of reactive mufflers. Computers & Mathematics with Applications, 79(12), 3447–3461. https://doi.org/10.1016/j.camwa.2020.02.004 [Google Scholar] [CrossRef]
29. Chen, L., Lu, C., Zhao, W., Chen, H., Zheng, C. (2020). Subdivision surfaces-boundary element accelerated by fast multipole for the structural acoustic problem. Journal of Theoretical and Computational Acoustics, 28(2), 2050011. https://doi.org/10.1142/S2591728520500115 [Google Scholar] [CrossRef]
30. Qu, Y., Pan, E., Zhu, F., Jin, F., Roy, A. K. (2023). Modeling thermoelectric effects in piezoelectric semiconductors: New fully coupled mechanisms for mechanically manipulated heat flux and refrigeration. International Journal of Engineering Science, 182, 103775. https://doi.org/10.1016/j.ijengsci.2022.103775 [Google Scholar] [CrossRef]
31. Audoux, Y., Montemurro, M., Pailhes, J. (2018). A surrogate model based on non-uniform rational b-splines hypersurfaces. Procedia CIRP, 70, 463–468. https://doi.org/10.1016/j.procir.2018.03.234 [Google Scholar] [CrossRef]
32. Simpson, R. N., Liu, Z., Vazquez, R., Evans, J. A. (2018). An isogeometric boundary element method for electromagnetic scattering with compatible b-spline discretizations. Journal of Computational Physics, 362, 264–289. https://doi.org/10.1016/j.jcp.2018.01.025 [Google Scholar] [CrossRef]
33. Rahmouni, F., Elajrami, M., Madani, K., Campilho, R. (2022). Isogeometric analysis based on non-uniform rational b-splines technology of stress and failure strength in inter-ply hybrid laminated composite. Journal of Composite Materials, 56(18), 2921–2932. https://doi.org/10.1177/00219983221105313 [Google Scholar] [CrossRef]
34. Bazilevs, Y., Calo, V. M., Cottrell, J. A., Evans, J. A., Hughes, T. J. R. et al. (2010). Isogeometric analysis using t-splines. Computer Methods in Applied Mechanics and Engineering, 199(5–8), 229–263. [Google Scholar]
35. Uhm, T. K., Youn, S. K. (2009). T-spline finite element method for the analysis of shell structures. International Journal for Numerical Methods in Engineering, 80(4), 507–536. https://doi.org/10.1002/nme.v80:4 [Google Scholar] [CrossRef]
36. Ginnis, A. I., Kostas, K. V., Politis, C. G., Kaklis, P. D., Belibassakis, K. A. et al. (2014). Isogeometric boundary-element analysis for the wave-resistance problem using t-splines. Computer Methods in Applied Mechanics and Engineering, 279, 425–439. https://doi.org/10.1016/j.cma.2014.07.001 [Google Scholar] [CrossRef]
37. Yang, J., Zhao, G., Wang, W., Du, X., Guo, M. et al. (2022). Surface blending using t-splines in semi-nurbs form. Computer Aided Design, 146, 103210. https://doi.org/10.1016/j.cad.2022.103210 [Google Scholar] [CrossRef]
38. Qu, Y., Zhu, F., Pan, E., Jin, F., Hirakata, H. (2023). Analysis of wave-particle drag effect in flexoelectric semiconductor plates via mindlin method. Applied Mathematical Modelling, 118, 541–555. https://doi.org/10.1016/j.apm.2023.01.040 [Google Scholar] [CrossRef]
39. Catmull, E. E., Clark, J. (1978). Recursively generated b-spline surfaces on arbitrary topological meshes. In: Seminal graphics: Pioneering efforts that shaped the field. New York, USA: Association for Computing Machinery. [Google Scholar]
40. Loop, C. T. (1987). Smooth subdivision surfaces based on triangles (Master’s Thesis). University of Utah, Department of Mathematics. [Google Scholar]
41. Green, S., Turkiyyah, G., Storti, D. (2002). Subdivision-based multilevel methods for large scale engineering simulation of thin shells. Proceedings of the Seventh ACM Symposium on Solid Modeling and Applications, Saarbrucken, Germany. [Google Scholar]
42. Cohen, E., Lyche, T., Riesenfeld, R. (1980). Discrete b-splines and subdivision techniques in computer-aided geometric design and computer graphics. Computer Graphics and Image Processing, 14(2), 87–111. https://doi.org/10.1016/0146-664X(80)90040-4 [Google Scholar] [CrossRef]
43. Lu, C., Chen, L., Luo, J., Chen, H. (2023). Acoustic shape optimization based on isogeometric boundary element method with subdivision surfaces. Engineering Analysis with Boundary Elements, 146, 951–965. https://doi.org/10.1016/j.enganabound.2022.11.010 [Google Scholar] [CrossRef]
44. Chen, L., Lu, C., Lian, H., Liu, Z., Zhao, W. et al. (2020). Acoustic topology optimization of sound absorbing materials directly from subdivision surfaces with isogeometric boundary element methods. Computer Methods in Applied Mechanics and Engineering, 362, 112806. https://doi.org/10.1016/j.cma.2019.112806 [Google Scholar] [CrossRef]
45. Qu, Y. L., Guo, Z. W., Zhang, G. Y., Gao, X. L., Jin, F. (2022). A new model for circular cylindrical kirchhoff-love shells incorporating microstructure and flexoelectric effects. Journal of Applied Mechanics, 89(12), 121010. https://doi.org/10.1115/1.4055658 [Google Scholar] [CrossRef]
46. Cerrato, A., Rodríguez-Tembleque, L., González, J. A., Aliabadi, M. F. (2017). A coupled finite and boundary spectral element method for linear water-wave propagation problems. Applied Mathematical Modelling, 48, 1–20. https://doi.org/10.1016/j.apm.2017.03.061 [Google Scholar] [CrossRef]
47. Sumbatyan, M., Martynova, T., Musatova, N. (2021). Boundary element methods in diffraction of a point-source acoustic wave by a rigid infinite wedge. Engineering Analysis with Boundary Elements, 125, 157–167. https://doi.org/10.1016/j.enganabound.2021.01.017 [Google Scholar] [CrossRef]
48. Tadeu, A. J., António, J. M., Kausel, E. (2002). 3D scattering of waves by a cylindrical irregular cavity of infinite length in a homogeneous elastic medium. Computer Methods in Applied Mechanics and Engineering, 191(27–28), 3015–3033. [Google Scholar]
49. Schanz, M. (2001). Application of 3D time domain boundary element formulation to wave propagation in poroelastic solids. Engineering Analysis with Boundary Elements, 24(4/5), 363–376. [Google Scholar]
50. Chen, L., Wang, Z., Lian, H., Ma, Y., Meng, Z. et al. (2024). Reduced order isogeometric boundary element methods for cad-integrated shape optimization in electromagnetic scattering. Computer Methods in Applied Mechanics and Engineering, 419, 116654. https://doi.org/10.1016/j.cma.2023.116654 [Google Scholar] [CrossRef]
51. Liu, Y. (2019). On the bem for acoustic wave problems. Engineering Analysis with Boundary Elements, 107, 53–62. https://doi.org/10.1016/j.enganabound.2019.07.002 [Google Scholar] [CrossRef]
52. Ji, Z. L., Ma, Q., Zhang, Z. H. (1994). Application of the boundary element method to predicting acoustic performance of expansion chamber mufflers with mean flow. Journal of Sound and Vibration, 173(1), 57–71. https://doi.org/10.1006/jsvi.1994.1217 [Google Scholar] [CrossRef]
53. Jiang, F., Zhao, W., Chen, L., Zheng, C., Chen, H. (2021). Combined shape and topology optimization for sound barrier by using the isogeometric boundary element method. Engineering Analysis with Boundary Elements, 124, 124–136. https://doi.org/10.1016/j.enganabound.2020.12.009 [Google Scholar] [CrossRef]
54. Zhang, S., Yu, B., Chen, L. (2024). Non-iterative reconstruction of time-domain sound pressure and rapid prediction of large-scale sound field based on IG-DRBEM and POD-RBF. Journal of Sound and Vibration, 573, 118226. https://doi.org/10.1016/j.jsv.2023.118226 [Google Scholar] [CrossRef]
55. Fu, Z. J., Chen, W., Gu, Y. (2014). Burton–miller-type singular boundary method for acoustic radiation and scattering. Journal of Sound and Vibration, 333(16), 3776–3793. https://doi.org/10.1016/j.jsv.2014.04.025 [Google Scholar] [CrossRef]
56. Chen, L., Li, H., Guo, Y., Chen, P., Atroshchenko, E. et al. (2023). Uncertainty quantification of mechanical property of piezoelectric materials based on isogeometric stochastic fem with generalized nth-order perturbation. Engineering with Computers, 83, 1–21. [Google Scholar]
57. Schanz, M. (2018). Fast multipole method for poroelastodynamics. Engineering Analysis with Boundary Elements, 89, 50–59. https://doi.org/10.1016/j.enganabound.2018.01.014 [Google Scholar] [CrossRef]
58. Abduljabbar, M., Farhan, M. A., Al Harthi, N., Chen, R., Yokota, R. et al. (2019). Extreme scale fmm-accelerated boundary integral equation solver for wave scattering. SIAM Journal on Scientific Computing, 41(3), C245–C268. [Google Scholar]
59. Zhao, K., Vouvakis, M. N., Lee, J. F. (2005). The adaptive cross approximation algorithm for accelerated method of moments computations of emc problems. IEEE Transactions on Electromagnetic Compatibility, 47(4), 763–773. https://doi.org/10.1109/TEMC.2005.857898 [Google Scholar] [CrossRef]
60. Kurz, S., Rain, O., Rjasanow, S. (2002). The adaptive cross-approximation technique for the 3D boundary-element method. IEEE Transactions on Magnetics, 38(2), 421–424. https://doi.org/10.1109/20.996112 [Google Scholar] [CrossRef]
61. Marussig, B., Zechner, J., Beer, G., Fries, T. P. (2015). Fast isogeometric boundary element method based on independent field approximation. Computer Methods in Applied Mechanics and Engineering, 284, 458–488. https://doi.org/10.1016/j.cma.2014.09.035 [Google Scholar] [CrossRef]
62. Zhou, W., Liu, B., Wang, Q., Cheng, Y., Ma, G. et al. (2017). Nurbs-enhanced boundary element method based on independent geometry and field approximation for 2D potential problems. Engineering Analysis with Boundary Elements, 83, 158–166. https://doi.org/10.1016/j.enganabound.2017.07.013 [Google Scholar] [CrossRef]
63. Venås, J. V., Kvamsdal, T. (2020). Isogeometric boundary element method for acoustic scattering by a submarine. Computer Methods in Applied Mechanics and Engineering, 359, 112670. https://doi.org/10.1016/j.cma.2019.112670 [Google Scholar] [CrossRef]
64. Chen, L., Zhang, Y., Lian, H., Atroshchenko, E., Ding, C. et al. (2020). Seamless integration of computer-aided geometric modeling and acoustic simulation: Isogeometric boundary element methods based on catmull-clark subdivision surfaces. Advances in Engineering Software, 149, 102879. https://doi.org/10.1016/j.advengsoft.2020.102879 [Google Scholar] [CrossRef]
65. Wu, Y., Dong, C., Yang, H. (2020). Isogeometric indirect boundary element method for solving the 3D acoustic problems. Journal of Computational and Applied Mathematics, 363, 273–299. https://doi.org/10.1016/j.cam.2019.06.013 [Google Scholar] [CrossRef]
66. Takahashi, T., Matsumoto, T. (2012). An application of fast multipole method to isogeometric boundary element method for laplace equation in two dimensions. Engineering Analysis with Boundary Elements, 36(12), 1766–1775. https://doi.org/10.1016/j.enganabound.2012.06.004 [Google Scholar] [CrossRef]
67. Gong, Y., Dong, C. (2017). An isogeometric boundary element method using adaptive integral method for 3D potential problems. Journal of Computational and Applied Mathematics, 319, 141–158. https://doi.org/10.1016/j.cam.2016.12.038 [Google Scholar] [CrossRef]
68. Chen, L., Li, K., Peng, X., Lian, H., Lin, X. et al. (2021). Isogeometric boundary element analysis for 2D transient heat conduction problem with radial integration method. Computer Modeling in Engineering & Sciences, 126(1), 107–119. https://doi.org/10.32604/cmes.2021.012821 [Google Scholar] [CrossRef]
69. Li, H., Chen, L., Zhi, G., Meng, L., Lian, H. et al. (2024). A direct FE2 method for concurrent multilevel modeling of piezoelectric materials and structures. Computer Methods in Applied Mechanics and Engineering, 420, 116696. https://doi.org/10.1016/j.cma.2023.116696 [Google Scholar] [CrossRef]
70. Qu, Y., Jin, F., Yang, J. (2022). Buckling of a reissner–mindlin plate of piezoelectric semiconductors. Meccanica, 57(11), 2797–2807. https://doi.org/10.1007/s11012-022-01598-2 [Google Scholar] [CrossRef]
71. Taus, M., Rodin, G. J., Hughes, T. J., Scott, M. A. (2019). Isogeometric boundary element methods and patch tests for linear elastic problems: Formulation, numerical integration, and applications. Computer Methods in Applied Mechanics and Engineering, 357, 112591. https://doi.org/10.1016/j.cma.2019.112591 [Google Scholar] [CrossRef]
72. Chen, H., Yu, B., Liu, Z., Zhou, H. (2023). A non-iterative methodology to reconstruct boundary shapes and conditions in isotropic linear elasticity based on the BEM. Engineering Analysis with Boundary Elements, 153, 12–24. https://doi.org/10.1016/j.enganabound.2023.05.019 [Google Scholar] [CrossRef]
73. Ghosh, N., Mukherjee, S. (1987). A new boundary element method formulation for three dimensional problems in linear elasticity. Acta Mechanica, 67(1–4), 107–119. [Google Scholar]
74. Lian, H., Kerfriden, P., Bordas, S. (2016). Implementation of regularized isogeometric boundary element methods for gradient-based shape optimization in two-dimensional linear elasticity. International Journal for Numerical Methods in Engineering, 106(12), 972–1017. https://doi.org/10.1002/nme.v106.12 [Google Scholar] [CrossRef]
75. Yu, B., Cao, G., Ren, S., Gong, Y., Dong, C. (2022). An isogeometric boundary element method for transient heat transfer problems in inhomogeneous materials and the non-iterative inversion of loads. Applied Thermal Engineering, 212, 118600. https://doi.org/10.1016/j.applthermaleng.2022.118600 [Google Scholar] [CrossRef]
76. Chen, L., Lian, H., Liu, Z., Chen, H. B., Atroshchenko, E. et al. (2019). Structural shape optimization of three dimensional acoustic problems with isogeometric boundary element methods. Computer Methods in Applied Mechanics and Engineering, 355, 926–951. https://doi.org/10.1016/j.cma.2019.06.012 [Google Scholar] [CrossRef]
77. Chen, L., Zhao, J., Lian, H., Yu, B., Atroshchenko, E. et al. (2023). A bem broadband topology optimization strategy based on taylor expansion and soar method-application to 2D acoustic scattering problems. International Journal for Numerical Methods in Engineering, 124(23), 5151–5182. https://doi.org/10.1002/nme.v124.23 [Google Scholar] [CrossRef]
78. Chen, L., Liu, C., Zhao, W., Liu, L. (2018). An isogeometric approach of two dimensional acoustic design sensitivity analysis and topology optimization analysis for absorbing material distribution. Computer Methods in Applied Mechanics and Engineering, 336, 507–532. https://doi.org/10.1016/j.cma.2018.03.025 [Google Scholar] [CrossRef]
79. Chen, L., Lian, H., Liu, Z., Gong, Y., Zheng, C. et al. (2022). Bi-material topology optimization for fully coupled structural-acoustic systems with isogeometric FEM-BEM. Engineering Analysis with Boundary Elements, 135, 182–195. https://doi.org/10.1016/j.enganabound.2021.11.005 [Google Scholar] [CrossRef]
80. Bendat, J. S., Piersol, A. G. (1987). Random data: Analysis and measurement procedures. https://books.google.fr/books?id=qYSViFRNMlwC (accessed on 27/10/2023). [Google Scholar]
81. Cheng, S., Wang, F., Li, P. -W., Qu, W. (2022). Singular boundary method for 2D and 3D acoustic design sensitivity analysisimage 1. Computers & Mathematics with Applications, 119, 371–386. https://doi.org/10.1016/j.camwa.2022.06.009 [Google Scholar] [CrossRef]
82. Liu, H., Wang, F. (2024). A novel semi-analytical meshless method for the thickness optimization of porous material distributed on sound barriers. Applied Mathematics Letters, 147, 108844. https://doi.org/10.1016/j.aml.2023.108844 [Google Scholar] [CrossRef]
83. Han, Z., Pan, W., Cheng, C., Hu, Z., Niu, Z. (2022). A semi-analytical treatment for nearly singular integrals arising in the isogeometric boundary element method-based solutions of 3D potential problems. Computer Methods in Applied Mechanics and Engineering, 398, 115179. https://doi.org/10.1016/j.cma.2022.115179 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools