
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Outage Analysis of Optimal UAV Cooperation with IRS via Energy Harvesting Enhancement Assisted Computational Offloading
1 School of Information Engineering, Henan University of Science and Technology, Luoyang, 471000, China
2 Research and Innovation Center of Intelligent System, Longmen Laboratory, Luoyang, 471000, China
3 State Key Laboratory of Complex Electromagnetic Environment Effects on Electronics and Information System (CEMEE), Luoyang, 471000, China
4 Sustainable Digital Communications and Energy Systems (DIGCOM) Group, Nottingham Trent University, Nottingham, UK
* Corresponding Author: Baofeng Ji. Email:
(This article belongs to the Special Issue: Edge Computing Enabled Internet of Drones)
Computer Modeling in Engineering & Sciences 2024, 138(2), 1885-1905. https://doi.org/10.32604/cmes.2023.030872
Received 28 April 2023; Accepted 06 July 2023; Issue published 17 November 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The utilization of mobile edge computing (MEC) for unmanned aerial vehicle (UAV) communication presents a viable solution for achieving high reliability and low latency communication. This study explores the potential of employing intelligent reflective surfaces (IRS) and UAVs as relay nodes to efficiently offload user computing tasks to the MEC server system model. Specifically, the user node accesses the primary user spectrum, while adhering to the constraint of satisfying the primary user peak interference power. Furthermore, the UAV acquires energy without interrupting the primary user’s regular communication by employing two energy harvesting schemes, namely time switching (TS) and power splitting (PS). The selection of the optimal UAV is based on the maximization of the instantaneous signal-to-noise ratio. Subsequently, the analytical expression for the outage probability of the system in Rayleigh channels is derived and analyzed. The study investigates the impact of various system parameters, including the number of UAVs, peak interference power, TS, and PS factors, on the system’s outage performance through simulation. The proposed system is also compared to two conventional benchmark schemes: the optimal UAV link transmission and the IRS link transmission. The simulation results validate the theoretical derivation and demonstrate the superiority of the proposed scheme over the benchmark schemes.Keywords
The rapid advancement of emerging technologies, including Artificial Intelligence (AI), Internet of Things (IoT), and Internet of Everything (IoE), has led to an exponential increase in wireless connectivity. This growth presents a significant challenge for data-centric automation systems [1]. This challenge necessitates the deployment of a considerable number of base stations and wireless terminals to support the increasing demand for mobile services and large-scale wireless connections. However, this trend also poses a challenge for future wireless communication systems, as they must contend with highly complex networks, escalating hardware costs, and a surge in energy consumption. To address this pressing issue, there is an immediate need for a novel solution that achieves a balance between system performance and energy consumption costs [2,3].
In recent years, Unmanned Aerial Vehicles (UAVs) have garnered significant interest due to their high mobility and flexible deployment capabilities. Their flexibility, portability, powerful line-of-sight communication links, and low-cost, changeable use have made them increasingly popular in both research and commercial applications. Their essential features enable a wide range of civilian services, including transport and industrial monitoring, agriculture, forest fire management, and wireless services. However, the surge in data volume of wireless networks poses a significant challenge to the computing power demand of equipment. The current terminals are generally limited in computing resources and battery capacity. Mobile edge computing (MEC) is a novel computing technology that enables the transfer of computing power from the cloud to the edge of the network, thereby enhancing the efficiency of data processing and transmission. By integrating wireless networks and technologies, and deploying computing and storage resources at the edge of the network closer to mobile devices or sensors, MEC significantly alleviates the pressure on the network and data center, enhances server response ability, protects privacy data, reduces the risk of data uploading and sharing in the cloud, and focuses on real-time, short-cycle data analysis. MEC meets the key requirements of IoT digitization in agile connection, business implementation, data optimization, application intelligence, security, and privacy protection. It is anticipated that the integration of MEC and UAVs will provide robust support for embracing the forthcoming era of the Internet of Drones (IOD).
In effect, there is already a substantial body of literature exploring MEC enabled drone solutions. Reference [4] introduced three MEC architectures that support UAVs, which improve communication performance and reduce execution latency. A MEC wireless power supply system for UAVs was developed by [5], and the computational rate maximization problem in the UAVs MEC wireless power supply system was solved. The problem was constrained by the causal constraints of energy acquisition and UAV speed. Reference [6] designed a UAV-assisted MEC computing offloading scheme based on deep reinforcement learning to minimize the total cost, which is the weighted sum of delay, energy consumption, and bandwidth costs. Reference [7] proposed a resource pricing and trading scheme based on Stackelberg dynamic game to optimize the allocation of MEC resources, and applied blockchain technology to record the entire resource trading process to protect security and privacy. Reference [8] put forth two offloading schemes for enabling MEC networks in multiple UAVs. Their optimization goal is to minimize the global computing time and energy consumption of all drones, respectively. Reference [9] advanced four representative architectures of MEC systems based on UAVs, and by adopting software defined networks, the scalability and controllability of the network are improved.
The design of contemporary wireless communication systems has placed significant emphasis on spectrum and energy efficiency. In this regard, Intelligent Reflective Surface (IRS) has emerged as a promising green communication technology. IRS is passive, low-cost, and easily deployable, and has garnered extensive attention [10]. As a promising technology for future wireless networks, it supports energy-saving and cost-effective communication, and is considered one of the most promising 6G wireless communication technologies [11]. Through the use of low-cost passive components that exploit time-varying environments, IRS dynamically adjusts the phase shifts of reflected signals to modify the wireless propagation environment, resulting in high passive beamforming gains and improved efficiency of wireless power transmission [12]. IRS technology operates in full-duplex mode and consumes low power, making it a promising solution for enhancing both energy efficiency and spectral efficiency. Moreover, several studies have demonstrated the advantages of IRS technology by comparing it with other technologies. In one study [13], a comparison was made between the performance of IRS and decoding and forwarding (DF) relays, and it was concluded that even static relays with relatively low degrees of freedom require very high rates and/or larger IRS to outperform DF relays. In another study [14], the performance of mobile relays and IRS was compared, and it was found that mobile relays achieved a higher communication average signal-to-noise ratio than IRS, primarily due to the greater degree of freedom of motion of mobile relays. However, IRS still possesses certain inherent advantages over relays, such as lower cost and higher energy efficiency. Specifically, the work in [11] demonstrates that a proposed resource allocation method based on IRS can achieve up to 300% higher energy efficiency than traditional amplification and forwarding (AF) relay-based communication systems by appropriately designing the phase shifts of RIS applications. Additionally, in [15], it was suggested that IRS can be utilized to actively reprogram the communication environment, and its advantages in terms of coverage, energy conservation, and security are discussed.
As further research is conducted, the potential applications of IRS-assisted wireless networks in various scenarios and technologies continue to unfold. These scenarios include IRS-assisted Multiple Input Multiple Output (MIMO) [16–18], IRS-assisted large-scale MIMO [19], IRS-assisted mobile edge computing [20], IRS-assisted Unmanned Aerial Vehicle (UAV) communication [21,22], IRS-assisted physical layer security [23–26], robust beamforming design in IRS-assisted Multiple Input Single Output (MISO) communication [27], IRS-assisted Simultaneous Wireless Information and Power Transmission (SWIPT) [28–35], and IRS-enhanced non-orthogonal multiple access transmissions [36–38].
In light of this, this study considers a system model where UAVs and IRS assist users in offloading computing to edge servers, as presented in the third application scenario in [4]. To address the issue of energy consumption, the study also explores the use of cognitive radio network (CRN) based energy harvesting technology, which can provide more efficient, stable, and dependable communication services.
The contributions of this article are as follows:
Firstly, this paper proposed system model considers using IRS and UAV as relay nodes to effectively offload user computing tasks to the MEC server. In order to further alleviate the resource constraints faced by future wireless networks. The UAV in our model is energy harvesting enhanced.
Secondly, the computational offloading outage probability of the proposed model under Rayleigh channel is constructed and deduced. The correctness of the theoretical derivation is proved by the consistency between the theory and simulation. Additionally, a comparison is made with the computational offloading outage performance of traditional systems relying solely on IRS or only optimal relay links. The results clearly demonstrate that the proposed optimal relay cooperative IRS system exhibits a lower computational offloading outage probability, i.e., a higher computational offloading success rate.
This paper is organized as follows. Section 2 outlines the system model for the optimal UAV cooperative IRS to assist users in offloading computing to edge servers and provides a detailed description of the information transmission process. In Section 3, an analysis and derivation of the outage probability for the proposed model in Rayleigh channel is presented. Section 4 offers a comprehensive set of numerical evaluation results. Finally, Section 5 offers a summary of the findings.
This section introduces the system model proposed in this article and describes the information transmission process of the model.
As shown in Fig. 1, this paper considers the system model of the optimal UAV cooperative IRS offload user computing tasks to the MEC server that utilizes CRN energy harvesting. The system architecture is illustrated in Fig. 1, which consists of a primary user node

Figure 1: System model
The communication process between the user and the MEC server is predicated on the assumption that the signal is transmitted at fixed time intervals that are equally divided into two time slots. In the first time slot, the signal transmission link is established as
In the second time slot, the signal transmission link is established as
In the TS energy harvesting scheme, signal transmission time is bifurcated into two components. Throughout the entire signal transmission time
In the PS energy harvesting scheme, power is apportioned into two components.
In this paper, it is postulated that all transmission channels adhere to independent and identically distributed Rayleigh fading channels with an average channel gain of
2.2 Information Transmission Process
In the first time slot, the user node sends signals to the UAV nodes and the IRS under the constraint of the peak interference power
where,
Under the TS and PS energy harvesting schemes, the power used by the user node to transmit signals is given as
and the signals received by the
where,
The channel capacity of the
where,
The UAV node functions in DF mode. When the capacity of the UAV received signal
where,
Assuming that the channel state information of all links is available, the aforementioned optimal UAV selection is based on the strategy of maximizing the signal-to-noise ratio. In other words, it relies on the instantaneous signal-to-noise ratio maximization at the legitimate user node
Next, we calculate the energy harvested at the
where,
At this point, the energy harvested at the UAV will be used to forward the signal, and its power is expressed as
where,
At this point, the signals received by the MEC server from the optimal UAV
where,
Since all links in the model in this paper adopt Rayleigh fading channels, all channel gains
where,
Letting
where
3 Outage Probability Performance Analysis
This section concerns the derivation and analysis of a closed-form expression for the outage probability of the optimal UAV cooperative IRS offload user computing tasks to the MEC server system model.
The outage probability of a system is a measure of its link capacity, representing the probability of the link being unable to meet the minimum required transmission rate
where,
3.1 Optimal UAV Link Outage Probability
where,
where,
Similarly, the calculation process of
The precise closed expression of the optimal UAV link outage probability is given as
3.2 IRS Link Outage Probability
The CDF of the signal-to-noise ratio of the IRS link under Rayleigh fading channels has been explicitly provided in literature [41] as
where,
In summary, the outage probability of the proposed system model in the calculation primarily encompasses determining the optimal UAV link outage probability and IRS link outage probability. The specific algorithmic flow is illustrated in Table 1. Initially, UAV link transmission entails the user node transmitting signals to multiple UAV nodes with power

4 Simulation and Result Analysis
This study employs Monte Carlo simulation to validate the accuracy of the proposed scheme and theory in deriving the closed expression and examines the effect of various parameters on its outage performance. Additionally, a comparison is made with the outage performance of traditional systems that rely solely on IRS or only optimal UAV links. The results clearly demonstrate that the proposed optimal UAV cooperative IRS system exhibits a lower outage probability, i.e., higher stability and reliability.
To facilitate analysis and simulation, it is assumed that parameters related to network size are set to a smaller value, and the initial values of each parameter are set to
Fig. 2 simulates the change curve of outage probability with the primary user’s peak interference power

Figure 2: The curves of outage probability with different
Fig. 3 simulates the change curve of outage probability with UAV decoding threshold
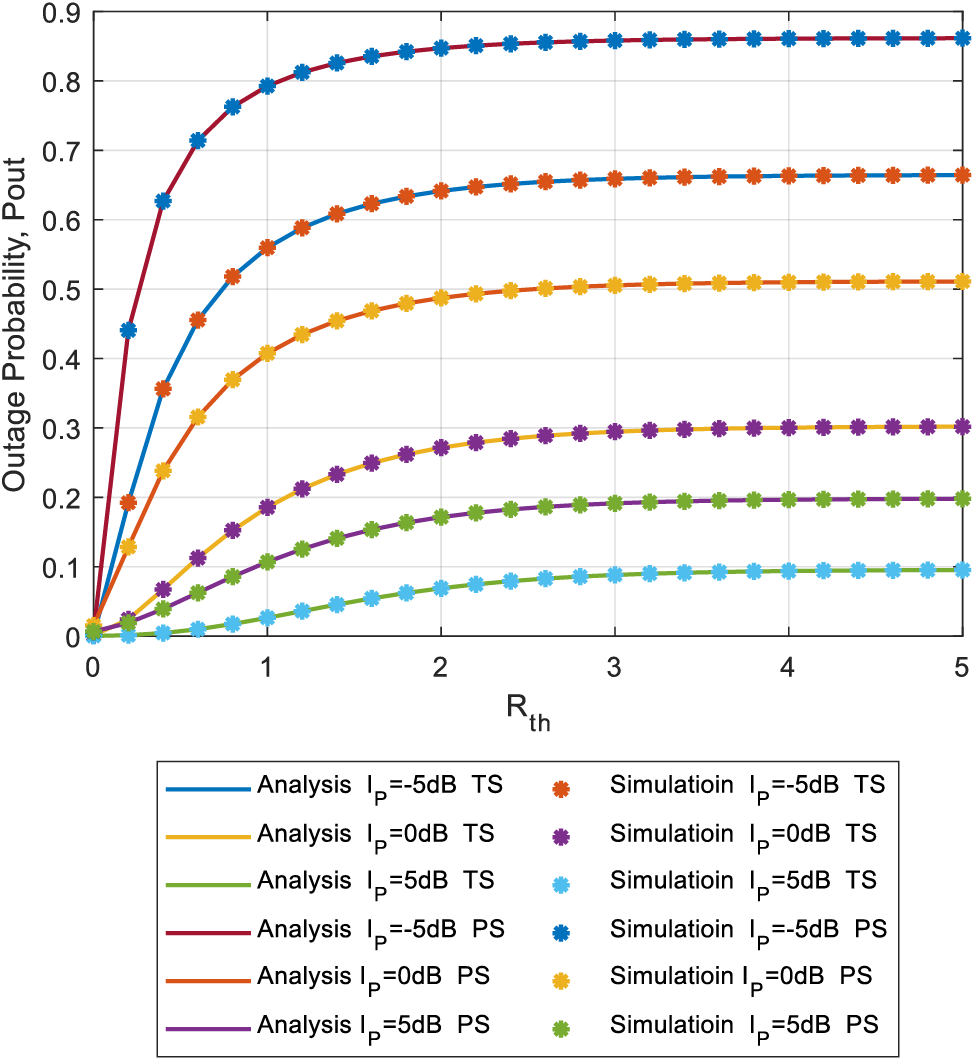
Figure 3: The curves of outage probability with different
Fig. 4 simulates the outage probability as a function of the primary user’s peak interference power

Figure 4: The curves of outage probability with different
Fig. 5 simulates the outage probability as a function of the outage threshold

Figure 5: The curves of outage probability with different
Fig. 6 simulates the outage probability as a function of the number of relays under different primary user peak interference power

Figure 6: The curves of outage probability with different
Fig. 7 simulates the change of the outage probability curve with the primary user peak interference power

Figure 7: The curves of outage probability with different
Fig. 8 simulates the change of the outage probability curve with time conversion factor

Figure 8: The curves of outage probability with different
Fig. 9 simulates the change of outage probability curve vs. energy conversion coefficient

Figure 9: The curves of outage probability with different
Fig. 10 simulates and compares the only optimal UAV transmission link, the only IRS transmission link, and the optimal UAV cooperative IRS system proposed in this paper. The simulation has been carried out under different energy harvesting schemes, when the outage probability varies with

Figure 10: The curves of outage probability with different link and energy harvesting schemes
This paper presents an analysis of the outage probability of a Rayleigh fading channel-based energy harvesting enhanced optimal UAV cooperative IRS to assist users in offloading computing tasks to MEC servers’ system model. The simulation results demonstrate that the theoretical analysis matches well with the actual simulation results, thereby validating the accuracy of the theoretical analysis presented in this paper. In addition, the proposed system is compared to a system that solely relies on optimal UAV link transmission and another system that exclusively relies on IRS link transmission. The simulation results indicate that the optimal UAV cooperative IRS system model proposed in this paper exhibits a higher computation offloading success rate. Due to the cluster communication characteristics of future mobile networks, in the face of massive computing tasks, in order to be closer to the actual situation, more complex heterogeneous and complex models will be considered, and AI and blockchain technology will be combined to optimize the computing offload performance.
Acknowledgement: Many thanks for the resources and materials provided by Henan University of Science and Technology and Henan Longmen Laboratory, and thank the team members for their support.
Funding Statement: This work was supported by the National Natural Science Foundation of China (62271192); Henan Provincial Scientists Studio (GZS2022015), Central Plains Talents Plan (ZYYCYU202012173); National Key R&D Program of China (2020YFB2008400); the Program of CEMEE (2022Z00202B); LAGEO of Chinese Academy of Sciences (LAGEO-2019-2); Program for Science & Technology Innovation Talents in the University of Henan Province (20HASTIT022); Natural Science Foundation of Henan under Grant 202300410126; Program for Innovative Research Team in University of Henan Province (21IRTSTHN015); Equipment Pre-Research Joint Research Program of Ministry of Education (8091B032129); Training Program for Young Scholar of Henan Province for Colleges and Universities (2020GGJS172); Program for Science & Technology Innovation Talents in Universities of Henan Province under Grand (22HASTIT020) and Henan Province Science Fund for Distinguished Young Scholars (222300420006).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design, formula derivation, analysis and interpretation of results: Baofeng Ji, Ying Wang; data collection, draft manuscript preparation: Weixing Wang; paper format review and language polishing: Shahid Mumtaz, Charalampos Tsimenidis. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Due to team policies and confidentiality agreements, we cannot provide data. We have fully described the process of experimental design, analysis and results, as well as data analysis and processing.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Mohsan, S. A. H., Othman, N. Q. H., Mohamed, A. F. A., Mazinani, A., Amjad, H. (2021). A vision of 6G: Technology trends, potential applications, challenges and future roadmap. International Journal of Computer Applications in Technology, 67(2–3), 275–288. [Google Scholar]
2. Guo, F., Yu, F. R., Zhang, H., Li, X., Ji, H. et al. (2021). Enabling massive IoT toward 6G: A comprehensive survey. IEEE Internet of Things Journal, 8(15), 11891–11915. [Google Scholar]
3. Sanusi, J., Oshiga, O., Thomas, S., Idris, S., Adeshina, S. et al. (2021). A review on 6G wireless communication systems: Localization and sensing. 2021 1st International Conference on Multidisciplinary Engineering and Applied Science (ICMEAS), pp. 1–5. Abuja, Nigeria. [Google Scholar]
4. Zhou, F., Hu, R. Q., Li, Z., Wang, Y. (2020). Mobile edge computing in unmanned aerial vehicle networks. IEEE Wireless Communications, 27(1), 140–146. [Google Scholar]
5. Zhou, F., Wu, Y., Hu, R. Q., Qian, Y. (2018). Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems. IEEE Journal on Selected Areas in Communications, 36(9), 1927–1941. [Google Scholar]
6. Wang, H., Ke, H., Sun, W. (2020). Unmanned-aerial-vehicle-assisted computation offloading for mobile edge computing based on deep reinforcement learning. IEEE Access, 8, 180784–180798. [Google Scholar]
7. Xu, H., Huang, W., Zhou, Y., Yang, D., Li, M. et al. (2021). Edge computing resource allocation for unmanned aerial vehicle assisted mobile network with blockchain applications. IEEE Transactions on Wireless Communications, 20(5), 3107–3121. [Google Scholar]
8. Ren, Y., Xie, Z., Ding, Z., Sun, X., Xia, J. et al. (2021). Computation offloading game in multiple unmanned aerial vehicle-enabled mobile edge computing networks. IET Communications, 15(10), 1392–1401. [Google Scholar]
9. Lin, C., Han, G., Shah, S. B. H., Zou, Y., Gou, L. (2021). Integrating mobile edge computing into unmanned aerial vehicle networks: An sdn-enabled architecture. IEEE Internet of Things Magazine, 4(4), 18–23. [Google Scholar]
10. Chen, R., Liu, M., Hui, Y., Cheng, N., Li, J. (2022). Reconfigurable intelligent surfaces for 6G IoT wireless positioning: A contemporary survey. IEEE Internet of Things Journal, 9(23), 23570–23582. [Google Scholar]
11. Huang, C., Zappone, A., Alexandropoulos, G. C., Debbah, M., Yuen, C. (2019). Reconfigurable intelligent surfaces for energy efficiency in wireless communication. IEEE Transactions on Wireless Communications, 18(8), 4157–4170. [Google Scholar]
12. Wu, Q., Zhang, R. (2020). Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Communications Magazine, 58(1), 106–112. [Google Scholar]
13. Björnson, E., Özdogan, Ö., Larsson, E. G. (2020). Intelligent reflecting surface versus decode-and-forward: How large surfaces are needed to beat relaying? IEEE Wireless Communications Letters, 9(2), 244–248. [Google Scholar]
14. Madrid, M. B., Famaey, J., Lemic, F. (2022). Intelligent reflective surface vs. mobile relay-supported NLoS avoidance in indoor mmWave networks. GLOBECOM 2022—2022 IEEE Global Communications Conference, pp. 934–939. Rio de Janeiro, Brazil. [Google Scholar]
15. Liaskos, C., Tsioliaridou, A., Pitsillides, A., Ioannidis, S., Akyildiz, I. (2018). Using any surface to realize a new paradigm for wireless communications. Communications of the ACM, 61(11), 30–33. [Google Scholar]
16. Yan, W., Yuan, X., He, Z. Q., Kuai, X. (2020). Passive beamforming and information transfer design for reconfigurable intelligent surfaces aided multiuser MIMO systems. IEEE Journal on Selected Areas in Communications, 38(8), 1793–1808. [Google Scholar]
17. Dong, L., Wang, H. M. (2020). Enhancing secure MIMO transmission via intelligent reflecting surface. IEEE Transactions on Wireless Communications, 19(11), 7543–7556. [Google Scholar]
18. Hong, S., Pan, C., Ren, H., Wang, K., Nallanathan, A. (2020). Artificial-noise-aided secure MIMO wireless communications via intelligent reflecting surface. IEEE Transactions on Communications, 68(12), 7851–7866. [Google Scholar]
19. Zhi, K., Pan, C., Ren, H., Wang, K. (2021). Statistical CSI-based design for reconfigurable intelligent surface-aided massive MIMO systems with direct links. IEEE Wireless Communications Letters, 10(5), 1128–1132. [Google Scholar]
20. Bai, T., Pan, C., Deng, Y., Elkashlan, M., Nallanathan, A. et al. (2020). Latency minimization for intelligent reflecting surface aided mobile edge computing. IEEE Journal on Selected Areas in Communications, 38(11), 2666–2682. [Google Scholar]
21. Shafique, T., Tabassum, H., Hossain, E. (2021). Optimization of wireless relaying with flexible UAV-borne reflecting surfaces. IEEE Transactions on Communications, 69(1), 309–325. [Google Scholar]
22. Li, S., Duo, B., Yuan, X., Liang, Y. C., Di Renzo, M. (2020). Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming. IEEE Wireless Communications Letters, 9(5), 716–720. [Google Scholar]
23. Shen, H., Xu, W., Gong, S., He, Z., Zhao, C. (2019). Secrecy rate maximization for intelligent reflecting surface assisted multi-antenna communications. IEEE Communications Letters, 23(9), 1488–1492. [Google Scholar]
24. Cui, M., Zhang, G., Zhang, R. (2019). Secure wireless communication via intelligent reflecting surface. IEEE Wireless Communications Letters, 8(5), 1410–1414. [Google Scholar]
25. Lv, L., Wu, Q., Li, Z., Al-Dhahir, N., Chen, J. (2021). Secure two-way communications via intelligent reflecting surfaces. IEEE Communications Letters, 25(3), 744–748. [Google Scholar]
26. Wu, C., Yan, S., Zhou, X., Chen, R., Sun, J. (2021). Intelligent reflecting surface (IRS)-aided covert communication with warden’s statistical CSI. IEEE Wireless Communications Letters, 10(7), 1449–1453. [Google Scholar]
27. Zhou, G., Pan, C., Ren, H., Wang, K., Nallanathan, A. (2020). A framework of robust transmission design for IRS-Aided MISO communications with imperfect cascaded channels. IEEE Transactions on Signal Processing, 68, 5092–5106. [Google Scholar]
28. Zargari, S., Khalili, A., Zhang, R. (2021). Energy efficiency maximization via joint active and passive beamforming design for multiuser MISO IRS-aided SWIPT. IEEE Wireless Communications Letters, 10(3), 557–561. [Google Scholar]
29. Zargari, S., Farahmand, S., Abolhassani, B., Tellambura, C. (2021). Robust active and passive beamformer design for IRS-aided downlink MISO PS-SWIPT with a nonlinear energy harvesting model. IEEE Transactions on Green Communications and Networking, 5(4), 2027–2041. [Google Scholar]
30. Liu, J., Xiong, K., Lu, Y., Ng, D. W. K., Zhong, Z. et al. (2020). Energy efficiency in secure IRS-aided SWIPT. IEEE Wireless Communications Letters, 9(11), 1884–1888. [Google Scholar]
31. Wu, Q., Zhang, R. (2020). Joint active and passive beamforming optimization for intelligent reflecting surface assisted SWIPT under QoS constraints. IEEE Journal on Selected Areas in Communications, 38(8), 1735–1748. [Google Scholar]
32. Li, Z., Chen, W., Wu, Q., Wang, K., Li, J. (2022). Joint beamforming design and power splitting optimization in IRS-assisted SWIPT NOMA networks. IEEE Transactions on Wireless Communications, 21(3), 2019–2033. [Google Scholar]
33. Khalili, A., Zargari, S., Wu, Q., Ng, D. W. K., Zhang, R. (2021). Multi-objective resource allocation for IRS-aided SWIPT. IEEE Wireless Communications Letters, 10(6), 1324–1328. [Google Scholar]
34. Xu, D., Yu, X., Jamali, V., Ng, D. W. K., Schober, R. (2021). Resource allocation for large IRS-assisted SWIPT systems with non-linear energy harvesting model. 2021 IEEE Wireless Communications and Networking Conference (WCNC), pp. 1–7. Nanjing, China. [Google Scholar]
35. Wu, Q., Zhang, R. (2020). Weighted sum power maximization for intelligent reflecting surface aided SWIPT. IEEE Wireless Communications Letters, 9(5), 586–590. [Google Scholar]
36. Fu, M., Zhou, Y., Shi, Y., Letaief, K. B. (2021). Reconfigurable Intelligent surface empowered downlink non-orthogonal multiple access. IEEE Transactions on Communications, 69(6), 3802–3817. [Google Scholar]
37. Zheng, B., Wu, Q., Zhang, R. (2020). Intelligent reflecting surface-assisted multiple access with user pairing: NOMA or OMA? IEEE Communications Letters, 24(4), 753–757. [Google Scholar]
38. Abdullah, Z., Chen, G., Lambotharan, S., Chambers, J. A. (2020). A hybrid relay and intelligent reflecting surface network and its ergodic performance analysis. IEEE Wireless Communications Letters, 9(10), 1653–1657. [Google Scholar]
39. Zou, Y., Wang, X., Shen, W. (2013). Optimal relay selection for physical-layer security in cooperative wireless networks. IEEE Journal on Selected Areas in Communications, 31(10), 2099–2111. [Google Scholar]
40. Ji, B., Huang, J., Wang, Y., Song, K., Li, C. et al. (2023). Multi-relay cognitive network with anti-fragile relay communication for intelligent transportation system under aggregated interference. IEEE Transactions on Intelligent Transportation Systems, 24(7), 7736–7745. [Google Scholar]
41. Yang, L., Meng, F., Wu, Q., da Costa, D. B., Alouini, M. S. (2020). Accurate closed-form approximations to channel distributions of RIS-aided wireless systems. IEEE Wireless Communications Letters, 9(11), 1985–1989. [Google Scholar]
42. Peppas, K. P. (2011). Accurate closed-form approximations to generalised-K sum distributions and applications in the performance analysis of equal-gain combining receivers. IET Communications, 5(7), 982–989. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools