
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Bifurcation Analysis of a Nonlinear Vibro-Impact System with an Uncertain Parameter via OPA Method
1 School of Mathematics and Statistics, Xidian University, Xi’an, 710071, China
2 Department of Mathematics, Changzhi University, Changzhi, 046011, China
3 Department for Statistics and Mathematics, Faculty of Economics, University of Belgrade, Belgrade, 11000, Serbia
* Corresponding Author: Wei Li. Email:
(This article belongs to the Special Issue: Vibration Control and Utilization)
Computer Modeling in Engineering & Sciences 2024, 138(1), 509-524. https://doi.org/10.32604/cmes.2023.029215
Received 08 February 2023; Accepted 13 April 2023; Issue published 22 September 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In this paper, the bifurcation properties of the vibro-impact systems with an uncertain parameter under the impulse and harmonic excitations are investigated. Firstly, by means of the orthogonal polynomial approximation (OPA) method, the nonlinear damping and stiffness are expanded into the linear combination of the state variable. The condition for the appearance of the vibro-impact phenomenon is to be transformed based on the calculation of the mean value. Afterwards, the stochastic vibro-impact system can be turned into an equivalent high-dimensional deterministic non-smooth system. Two different Poincaré sections are chosen to analyze the bifurcation properties and the impact numbers are identified for the periodic response. Consequently, the numerical results verify the effectiveness of the approximation method for analyzing the considered nonlinear system. Furthermore, the bifurcation properties of the system with an uncertain parameter are explored through the high-dimensional deterministic system. It can be found that the excitation frequency can induce period-doubling bifurcation and grazing bifurcation. Increasing the random intensity may result in a diffusion-based trajectory and the impact with the constraint plane, which induces the topological behavior of the non-smooth system to change drastically. It is also found that grazing bifurcation appears in advance with increasing of the random intensity. The stronger impulse force can result in the appearance of the diffusion phenomenon.Keywords
As it is well known, the phenomena of impacts and dry frictions exist widely in a large number of engineering devices [1–3], which can induce the instability and insecurity of these devices. Thus, studying the dynamical properties has been an epoch-making field for solving the relative problems of these non-smooth devices [4–6]. In the last few years, numerous papers have concentrated on the study of non-smooth systems [4–8], in particular, on vibro-impact systems. This kind of vibro-impact system appears when a moving mass collides with a barrier and its displacement is greater than a critical value.
Various complex impact structures and models were designed and developed in the past decade; the study of these systems was extensively performed. Namely, since the 1960s, the theoretical and experimental analyses of an impact system under periodic excitation have been performed by Masri [8,9]. Based on the local Poincaré mapping method, the stabilities of non-smooth systems have been considered by Nordmark [10], Zhang et al. [11], and Jin et al. [12]. Furthermore, the transition phenomena between different bifurcation phenomena of an impact oscillator with viscous damping have been studied by Peterka [13]. Luo et al. [14] have researched the bifurcation characteristic of two-degree-of-freedom vibro-impact systems with weak and strong resonance. The global dynamics have been studied in a vibro-impact system with special friction by Gendelman et al. [15]. The chaotic attractors and the periodic behavior of an inelastic, forced-impact oscillator near subharmonic resonance conditions have been explored by Rounak et al. [16]. Additionally, random factors are unavoidable in the operation of dynamical systems [17,18]. By means of the mean Poincaré map, the responses of a vibro-impact system have been analyzed by Feng et al. [19]. By using the non-smooth variable transformation in [20], the energy losses induced by the impact and the probability density functions of the impact systems under stochastic excitation have been considered by Dimentberg et al. [21,22]. An averaging approach to researching the nonlinear dynamics of the vibro-impact system under the effect of random perturbations has been developed by Namachchivaya et al. [23]. Along with researching the multi-valued response of a nonlinear vibro-impact system with the existence of random narrow-band noise [24], Huang et al. have also considered the principal resonances of an elastic impact oscillator under stochastic excitation [25]. The stochastic dynamics of the contact force models with elastic impact phenomena under additive noise have been investigated by Kumar et al. [26]. By using the traditional theoretical analysis, the stochastic dynamical property of a nonlinear vibro-impact system with Coulomb friction under stochastic noise has been researched by Su et al. [27]. Besides investigating the stochastic response of SDOF vibro-impact oscillators under wide-band noise excitations, Qian et al. [28] have also studied the response of vibro-impact systems by the RBF neural network method [29]. Although numerous papers have been published, some stochastic non-smooth systems cannot be investigated by these theoretical methods due to the limited application.
In order to overcome the difficulty of studying dynamical systems with an uncertain parameter, the orthogonal polynomial approximation (OPA) method has been utilized to study the stochastic dynamics of some kinds of smooth dynamical systems [30–32] with uncertain parameters. Although different kinds of orthogonal polynomials can be chosen, the Chebyshev polynomial approximation [30,31] and the Laguerre polynomial approximation [33] are the main methods in the stochastic analysis. By using the method based on the derived approximate formula of the Laguerre polynomials, Wang et al. [33] have investigated the stochastic response of a nonlinear elastic impact system, along with studying the global dynamic behavior of this kind of system with an uncertain parameter [34]. Utilizing the method of Chebyshev polynomial approximation, Feng et al. [35] have studied the bifurcation of a stochastic nonlinear system with a one-sided constraint. Li et al. [36] have considered the bifurcations of the van der Pol system with two-side barriers. Recently, Huang et al. [37] and Zhang et al. [38] have extended the Chebyshev polynomial approximation method to study nonlinear harvesters. However, so far there have been only few papers on the non-smooth dynamical systems with the OPA method. Therefore, in this paper, we mainly concentrate on studying the stochastic responses of the vibro-impact system with nonlinear stiffness and damping under an uncertain parameter subjected to periodic impulse excitation and harmonic excitation according to the OPA method.
The remaining part of this paper is organized as follows: the equivalent high-deterministic system is derived by the OPA method in Section 2; in Section 3 the effectiveness of the OPA method is proved. Afterwards, the bifurcation phenomena of the system by means of deterministic numerical methods are studied, summarizing the conclusions listed in Section 4.
2 Orthogonal Polynomial Approximation
As for stochastic vibro-impact system with nonlinear stiffness and damping under periodic impulse excitation and harmonic excitation, the non-smooth property is induced by the existence of a rigid barrier, as shown in Fig. 1, whose non-dimensional differential equation is given as follows:
where

Figure 1: The schematic of the nonlinear vibro-impact system
Particularly,
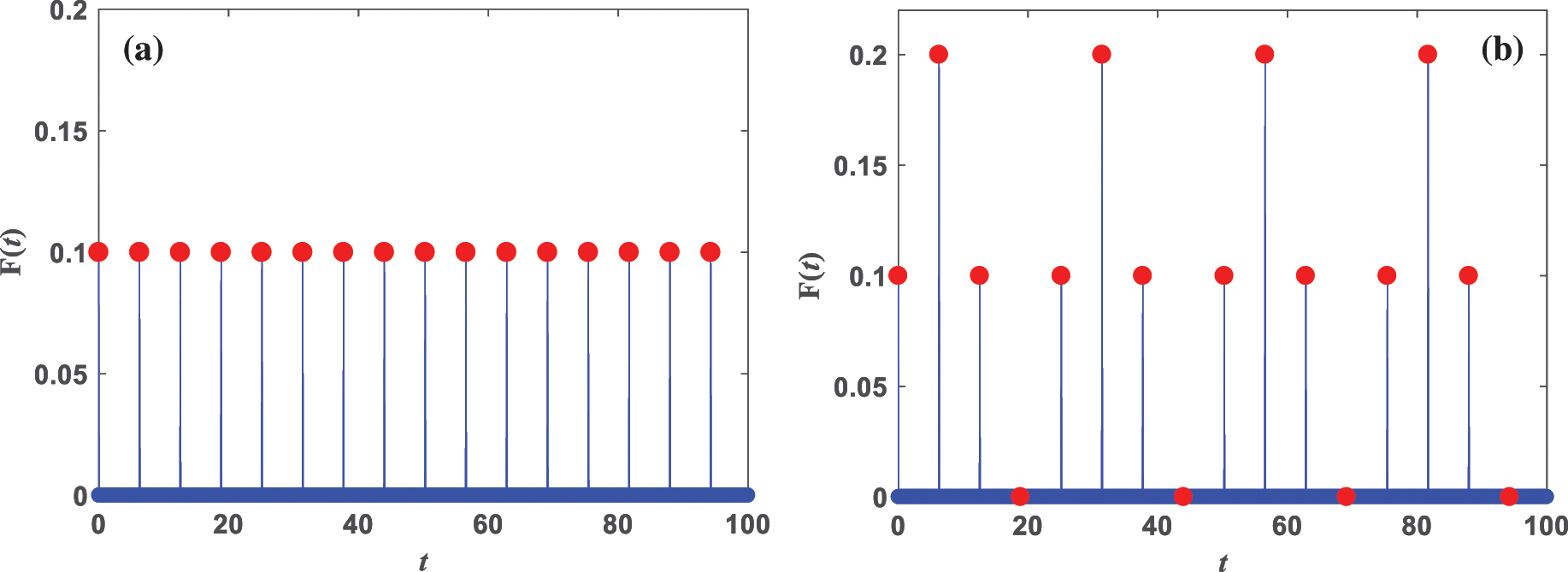
Figure 2: The periodic impulse force
When the displacement is
When the constraint condition is
According to the OPA method, the responses of the system (1) without the effect of impact can be expanded into the following sequence:
where
The orthogonality of the polynomials is:
Based on the property of the Chebyshev orthogonal polynomials, the recurrent formula among them is:
As for the case without any constraints, when substituting Eq. (3) into Eq. (2), it has:
By Eq. (5), the cubic terms of Eq. (6) can be expanded into a linear combination of the related single polynomials. The coefficient of
The expressions of
Substituting Eqs. (5), (7) and (8) into Eq. (6), the following can be derived:
In order to simplify Eq. (9), both sides of Eq. (9) are multiplied by
where
Since
By means of Eq. (20), the following relations can be defined:
the mean constraint condition
the mean constraint plane
and the mean jump condition
Substituting Eqs. (9)–(13) and (21)–(23) into the system (1), the stochastic nonlinear vibro-impact system can be simplified as follows: in case of
and in case of
Eqs. (24)–(28) are the equivalent high-dimensional deterministic systems derived by the mean jump equation, the mean constraint condition, and the Chebyshev polynomial approximation. Consequently, the numerical results of the system with an uncertain parameter can be obtained by effective numerical methods.
Naturally, in the deterministic case the parameters
Due to the deterministic property of Eq. (29), the response can be named the deterministic response (DMR). Therefore, for the equivalent system in Eqs. (24)–(28), by setting the parameter
In order to calculate the response, the initial condition of Eq. (29) is chosen as
Here, two different Poincaré sections (the phase plane and the constraint plane) are taken, while the value of c varies between

Figure 3: Bifurcation diagrams of DMR and EMR0 vs. c, (a) the phase plane as Poincaré section, (b) the constraint plane as Poincaré section

Figure 4: (a) The phase portraits and Poincaré sections for
3.2 Effects of an Uncertain Parameter on Period-Doubling Bifurcation
In order to consider the effects of an uncertain parameter on period-doubling bifurcation, the following system parameters are chosen:

Figure 5: The phase portraits (a)
As for

Figure 6: EMR for different values of
As a conclusion, under the effect of the uncertain parameter with the decreasing frequency
3.3 Existence of Grazing Bifurcation
In this section, to investigate the grazing bifurcation which is typical for the system with impact phenomenon, the same parameters are taken as in Section 3.1, except for
When the frequency is

Figure 7: EMR for different values of
At the same time, in case of
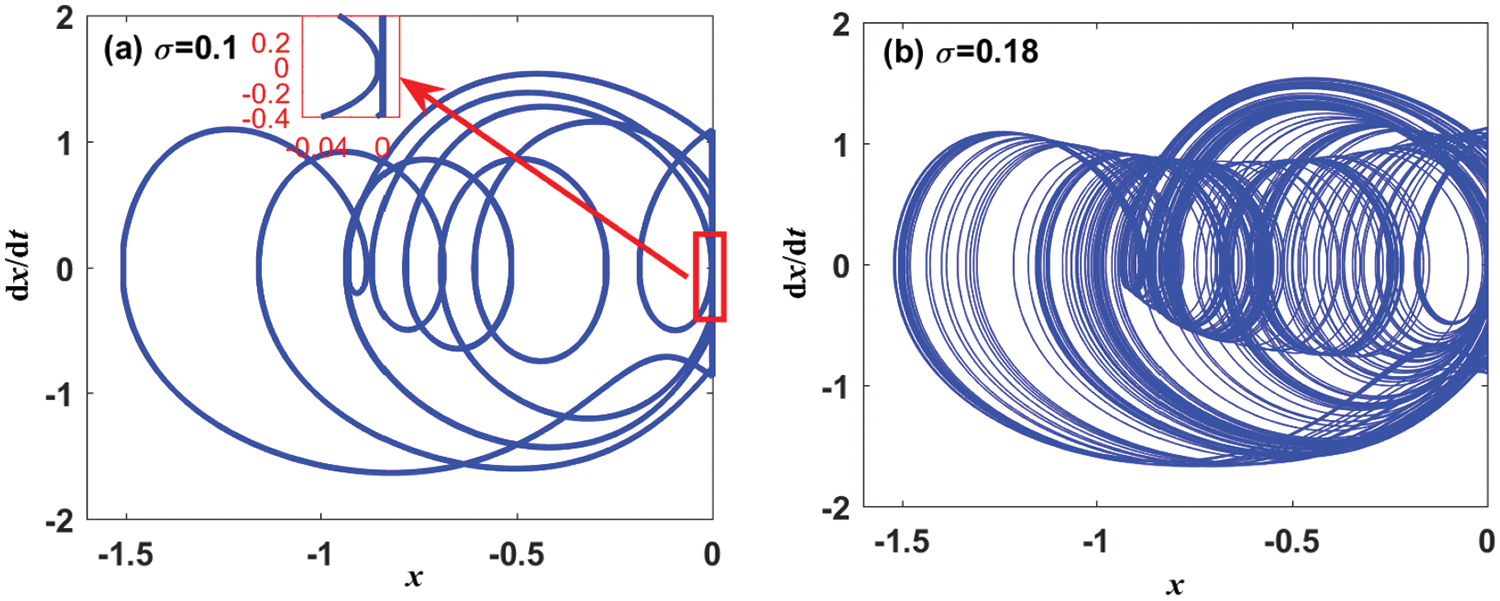
Figure 8: EMR for different values of
In order to present the effect of an uncertain parameter on bifurcation, for different values of intensity

Figure 9: The bifurcation diagrams of EMR vs.
3.4 Influence of the Impulse Force
When it comes to the influence of the impulse signal on the bifurcation properties the following ideas are considered: the stronger impulse signals are chosen with

Figure 10: The bifurcation diagrams of EMR0 vs. c with stronger impulse force, (a) the phase plane as Poincaré section with
The phase portraits in Fig. 11 also verify the results. As illustrated, under smaller impulse force, different values of n under the influence of the response are not obvious. With larger value of impulse force and under smaller value of n, the diffusion phenomenon can be noticed; however, larger value of n can induce a serious diffusion phenomenon.

Figure 11: The phase portraits for
In this paper, the OPA method is applied in the vibro-impact system with an uncertain parameter under periodic impulse excitation and harmonic excitation, and the damping coefficient is considered as an uncertain parameter. In order to study the dynamical response, the ensemble mean response of an equivalent high-dimensional system is introduced and the impact conditions are also transformed by means of the mean value; then, the deterministic high-dimensional equivalent vibro-impact system is derived. Afterward, the constraint plane and the phase plane are chosen as the Poincaré section, respectively, with the response properties being consistent in the bifurcation diagrams. By combining the analysis of the phase portraits, it is evident that the approximation method is effective in this kind of vibro-impact system. Furthermore, it has been proved that besides period-doubling bifurcation, certain grazing bifurcation exists also in the stochastic nonlinear vibro-impact system. Under the influence of the uncertain parameter, the system responds not only with the characteristic of the smooth system which can make trajectories of the systems’ diffusion, but also with a special characteristic of a non-smooth system. At a critical point of bifurcation, the random factors with certain intensity make the dynamical behavior of the system change drastically. Furthermore, grazing bifurcation appears in advance with increasing random intensity. The existence of the stronger impulse force can induce the appearance of a diffusion phenomenon. An appropriate choice of impulse force can control the vibration and improve the response performance. Overall, the bifurcation analysis is helpful for further investigating of stochastic dynamics.
Acknowledgement: The authors are grateful for the support by the National Natural Science Foundation of China, the Bilateral Governmental Personnel Exchange Project between China and Slovenia for the Years 2021–2023, Slovenian Research Agency ARRS in Frame of Bilateral Project, the Fundamental Research Funds for the Central Universities, Joint University Education Project between China and East European.
Funding Statement: This work was supported by the National Natural Science Foundation of China (Grant Nos. 12172266, 12272283), the Bilateral Governmental Personnel Exchange Project between China and Slovenia for the Years 2021–2023 (Grant No. 12), Slovenian Research Agency ARRS in Frame of Bilateral Project (Grant No. P2-0137), the Fundamental Research Funds for the Central Universities (Grant No. QTZX23004), Joint University Education Project between China and East European (Grant No. 2021122).
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, Methodology, Validation: Dongmei Huang; analysis and interpretation of results: Dongmei Huang, Dang Hong, Wei Li; Writing-Original Draft: Dongmei Huang, Dang Hong, Wei Li, Guidong Yang and Vesna Rajic. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data will be made available on request.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Babitsky, V. I. (1998). Theory of vibro-impact systems and applications. Berlin: Springer Science & Business Media. [Google Scholar]
2. Jin, D., Hu, H. (2005). Vibration and control of collision. Beijing, China: Science Press. [Google Scholar]
3. Nguyen, K. T., La, N. T., Ho, K. T., Ngo, Q. H., Chu, N. H. et al. (2021). The effect of friction on the vibro-impact locomotion system: Modeling and dynamic response. Meccanica, 56, 2121–2137. [Google Scholar]
4. Stefani, G., de Angelis, M., Andreaus, U. (2021). Scenarios in the experimental response of a vibro-impact single-degree-of-freedom system and numerical simulations. Nonlinear Dynamics, 103(4), 3465–3488. [Google Scholar]
5. Hu, D., Xu, X., Guirao, J., Chen, H., Liu, X. (2022). Moment lyapunov exponent and stochastic stability of a vibro-impact system driven by Gaussian white noise. International Journal of Non-Linear Mechanics, 142, 103968. [Google Scholar]
6. Shaw, S. W. (1983). A periodically forced piecewise linear oscillator. Journal of Sound and Vibration, 90(1), 129–155. [Google Scholar]
7. Huang, D., Han, J., Li, W., Deng, H., Zhou, S. (2023). Responses, optimization and prediction of energy harvesters under galloping and base excitations. Communications in Nonlinear Science and Numerical Simulation, 119, 107086. [Google Scholar]
8. Masri, S. F. (1968). Analytical and experimental studies of impact damper. Journal of the Acoustical Society of America, 45, 1111–1117. [Google Scholar]
9. Masri, S. F. (1973). Steady state response of a multidegree system with an impact damper. Journal of Applied Mechanics, 30(3), 127–132. [Google Scholar]
10. Nordmark, A. B. (1991). Non-periodic motion caused by grazing incidence in an impact oscillator. Journal of Sound and Vibration, 145(2), 279–297. [Google Scholar]
11. Zhang, S., Lu, Q. (2000). A non-smooth analysis to the rub-impacting rotor system. Acta Physica Sinica, 32, 59–69. [Google Scholar]
12. Jin, L., Lu, Q. S. (2005). A method for calculating the spectrum of lyapunov exponents of non-smooth dynamical systems. Acta Mechanica Sinica, 37, 40–47. [Google Scholar]
13. Peterka, F. (1996). Bifurcation and transition phenomena in an impact oscillator. Chaos Solitons and Fractals, 7(10), 1635–1647. [Google Scholar]
14. Luo, G., Xie, J. (2004). Periodic motion and bifurcation of vibro-impact systems. Beijing, China: Science Press. [Google Scholar]
15. Gendelman, O., Kravetc, P., Rachinskii, D. (2019). Mixed global dynamics of forced vibro-impact oscillator with Coulomb friction. Chaos, 29(11), 113116. [Google Scholar] [PubMed]
16. Rounak, A., Gupta, S. (2020). Bifurcations in a pre-stressed, harmonically excited, vibro-impact oscillator at subharmonic resonances. International Journal of Bifurcation and Chaos, 30(8), 2050111. [Google Scholar]
17. Huang, D., Han, J., Zhou, S., Han, Q., Yang, G. et al. (2022). Stochastic and deterministic responses of an asymmetric quad-stable energy harvester. Mechanical Systems and Signal Processing, 168, 108672. [Google Scholar]
18. Huang, D., Zhou, S., Li, W., Litak, G. (2021). On the stochastic response regimes of a tristable viscoelastic isolation system under delayed feedback control. Science China Technological Sciences, 64(4), 858–868. [Google Scholar]
19. Feng, Q., He, H. (2003). Modeling of the mean Poincaré map on a class of random impact oscillators. European Journal of Mechanics-A/Solids, 22(2), 267–281. [Google Scholar]
20. Zhuravlev, V. F. (1976). A method for analyzing vibration-impact systems by means of special functions. Mechanics of Solids, 11(2), 23–27. [Google Scholar]
21. Dimentberg, M. F., Iourtchenko, D. V. (2004). Random vibrations with impacts: A review. Nonlinear Dynamics, 36, 229–254. [Google Scholar]
22. Iourtchenko, D. V., Song, L. L. (2006). Numerical investigation of a response probability density function of stochastic vibro-impact systems with inelastic impacts. International Journal of Non-Linear Mechanics, 41(3), 447–455. [Google Scholar]
23. Namachchivaya, N. S., Park, J. H. (2005). Stochastic dynamics of impact oscillators. Journal of Applied Mechanics, 72, 862–870. [Google Scholar]
24. Huang, D., Xu, W., Liu, D., Han, Q. (2016). Multi-valued responses of a nonlinear vibro-impact system excited by random narrow-band noise. Journal of Vibration and Control, 22(12), 2907–2920. [Google Scholar]
25. Huang, D., Xu, W., Xie, W., Han, Q. (2015). Principal resonance response of a stochastic elastic impact oscillator under nonlinear delayed state feedback. Chinese Physics B, 24(4), 040502. [Google Scholar]
26. Kumar, P., Narayanan, S., Gupta, S. (2022). Dynamics of stochastic vibro-impact oscillator with compliant contact force models. International Journal of Non-Linear Mechanics, 144, 104086. [Google Scholar]
27. Su, M., Xu, W., Yang, G. (2018). Response analysis of van der Pol vibro-impact system with Coulomb friction under Gaussian white noise. International Journal of Bifurcation and Chaos, 28(13), 1830043. [Google Scholar]
28. Qian, J., Chen, L. (2021). Random vibration of SDOF vibro-impact oscillators with restitution factor related to velocity under wide-band noise excitations. Mechanical Systems and Signal Processing, 147, 107082. [Google Scholar]
29. Qian, J., Chen, L., Sun, J. (2023). Random vibration analysis of vibro-impact systems: RBF neural network method. International Journal of Non-Linear Mechanics, 148, 104261. [Google Scholar]
30. Ma, S., Xu, W., Li, W., Jin, Y. (2005). Period-doubling bifurcation analysis of stochastic van der Pol system via Chebyshev polynomial approximation. Acta Physica Sinica, 54(80), 3508–3515. [Google Scholar]
31. Sun, X., Xu, W., Ma, S. (2006). Period-doubling bifurcation of a double-well Duffing-van der Pol system with bounded random parameters. Acta Physica Sinica, 55(2), 610–616. [Google Scholar]
32. Ma, S., Xu, W., Li, W. (2006). Analysis of bifurcation and chaos in double-well Duffing system via laguerre polynomial approximation. Acta Physica Sinica, 55(8), 4013–4019. [Google Scholar]
33. Wang, L., Xu, W., Li, G., Li, D. (2009). Response of a stochastic Duffing–Van der Pol elastic impact oscillator. Chaos, Solitons & Fractals, 41(4), 2075–2080. [Google Scholar]
34. Wang, L., Yue, X., Sun, C., Xu, W. (2013). The effect of the random parameter on the basins and attractors of the elastic impact system. Nonlinear Dynamics, 71, 597–602. [Google Scholar]
35. Feng, J., Xu, W., Wang, R. (2006). Period-doubling bifurcation of stochastic Duffing one-sided constraint system. Acta Physica Sinica, 55(11), 5733–5739. [Google Scholar]
36. Li, G., Xu, W., Wang, L., Feng, J. (2008). Investigation of the bifurcation of stochastic van der Pol system. Acta Physica Sinica, 57(4), 2107–2114. [Google Scholar]
37. Huang, D., Zhou, S., Han, Q., Litak, G. (2019). Response analysis of the nonlinear vibration energy harvester with an uncertain parameter. Proceedings of the Institution of Mechanical Engineers Part K: Journal of Multi-Body Dynamics, 234(2), 393–407. [Google Scholar]
38. Zhang, Y., Duan, X., Shi, Y., Yue, X. (2021). Response analysis of the tristable energy harvester with an uncertain parameter. Applied Sciences, 11(21), 9979. [Google Scholar]
39. Kamerich, E. (1999). A guide to Maple. New York: Springer. [Google Scholar]
40. Borwein, P., Erdelyi, T. (2003). Polynomials and polynomial inequality. New York: Springer. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools