
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Toward Optimal Periodic Crowd Tracking via Unmanned Aerial Vehicle
1
Department of Computer Science, College of Computer Engineering and Sciences, Prince Sattam Bin Abdulaziz University,
AlKharj, 11942, Saudi Arabia
2
Data Engineering and Semantics Research Unit, Faculty of Sciences of Sfax, University of Sfax, Sfax, Tunisia
3
Department of Computer Science and Artificial Intelligence, College of Computer Science and Engineering, University of Jeddah,
Jeddah, Saudi Arabia
4
Department of Mathematics and Business Intelligence, College of Electronics and Telecommunications Engineering of Sfax,
University of Sfax, Sfax, Tunisia
* Corresponding Author: Mahdi Khemakhem. Email:
Computer Modeling in Engineering & Sciences 2023, 137(1), 233-263. https://doi.org/10.32604/cmes.2023.026476
Received 10 September 2022; Accepted 22 December 2022; Issue published 23 April 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Crowd management and analysis (CMA) systems have gained a lot of interest in the vulgarization of unmanned aerial vehicles (UAVs) use. Crowd tracking using UAVs is among the most important services provided by a CMA. In this paper, we studied the periodic crowd-tracking (PCT) problem. It consists in using UAVs to follow-up crowds, during the life-cycle of an open crowded area (OCA). Two criteria were considered for this purpose. The first is related to the CMA initial investment, while the second is to guarantee the quality of service (QoS). The existing works focus on very specified assumptions that are highly committed to CMAs applications context. This study outlined a new binary linear programming (BLP) model to optimally solve the PCT motivated by a real-world application study taking into consideration the high level of abstraction. To closely approach different real-world contexts, we carefully defined and investigated a set of parameters related to the OCA characteristics, behaviors, and the CMA initial infrastructure investment (e.g., UAVs, charging stations (CSs)). In order to periodically update the UAVs/crowds and UAVs/CSs assignments, the proposed BLP was integrated into a linear algorithm called PCTs solver. Our main objective was to study the PCT problem from both theoretical and numerical viewpoints. To prove the PCTs solver effectiveness, we generated a diversified set of PCTs instances with different scenarios for simulation purposes. The empirical results analysis enabled us to validate the BLP model and the PCTs solver, and to point out a set of new challenges for future research directions.Keywords
The unmanned aerial vehicles (UAVs), also known as drones, refer to pilotless aircraft, flying vehicles without an onboard human pilot or passengers. The term “unmanned” indicates the non-existence of a human who directly and actively pilots the aircraft. The command functions for UAVs may be either on-board or off-board (remote control) [1]. Although the UAVs deployment was initially restricted to the military domain [2,3], it has become widely used within a wide range of domains over the last two decades [4], namely security [5–8], transportation and road management [9–11], networking and communications [12,13], logistics [14], agriculture [15,16], healthcare [17–19], and mining [20], among others.
In real life, each UAV application has been tackled depending on its context, needs, and consequently, took into account the minimum requirements of the used UAVs architecture. Indeed, the drone architecture is determined by its types of build, visual and onboard sensors, communication and power management after specifying its needs for such a real-world application [1,21,22]. A huge number of real-world applications have therefore been implemented and published in the literature. In [22], the authors tried to categorize the unnumbered UAVs applications according to the most important characteristics such as the drone flight zone (outdoor, indoor), mission (military, civil), and environment (underwater, water, ground, air, space). In this research, we focused on the daily life outdoor/civil/ground drone applications related to surveillance, search, and rescue missions. Among this set of applications, we found many recent surveys that specifically concentrated on the development of crowd monitoring and analysis (CMA) systems [21,23–26]. Indeed, UAVs have been used to automatically monitor and analyze several groups of people (crowds) to ensure specified purposes such as security [27–29], rescue [30,31], healthcare [32–35], and jostling avoidance [31,36–38], among others.
In [21], the authors classified UAVs applications and algorithms, for CMA, into five domains, namely, crowd detection [39–49], crowd counting [45,50–59], crowd density estimation [43,53,57,60–62], crowd tracking [49,63–66], and crowd behavior analysis [35,67,68]. In the present study, we were interested in optimally tracking crowds via UAVs. We supposed that the number, density, and behavior of crowds are already known with the help of some detection and prediction techniques (e.g., machine learning, image processing, etc.). The crowd tracking consists of closely following up crowds by UAVs to ensure continuous, real-time supervision in order to achieve the main target of a given CMA system. Using multiple UAVs for crowd tracking gives rise to the huge cost increases on CMA systems due to the swift increase in the acquisition, maintenance, and energy costs of these UAVs [64].
The underlying motivation of this research study was the improvement of crowd-tracking function of the CMA system using UAVs in the context of the annual Islamic pilgrimage (also called Hajj) that hosted about 2.5 million of pilgrims in 20191. In fact, during the Hajj period, which lasts about five days, many rites give rise to very big pilgrims gatherings at the same time in five main places namely: Mina, Arafat, Muzdalifah, Jamarat, Masjid-Al-Haram (see Fig. 1). Additionally, there is a significant number of crowds traveling through these five specific places during the Hajj period which may lead to safety issues. In fact, there have been many serious incidents caused by stampede, trampling to death, crush due to pedestrian collision, and fire outbreaks over the two last decades [69]. In the literature, several works have already tried to develop technologies for CMA systems in the context of Hajj so as to face such issues as control, rescue, and jostling avoidance. The state of the art of some domains indicates that many contributions have focused on the the above mentioned application and algorithm domains using several technologies like traditional/UAVs surveillance systems, communication networks, global positioning systems (GPS), internet of things (IoT), artificial intelligence, computer vision and image processing, big data analytics, etc. For more details and challenges, readers can refer to the literature reviews carried out in [31,70–74]. However, while focusing on the works that consider CMA systems based on UAVs surveillance [31,36–38,75], it can be easily noticed that these studies ignore the UAVs cost optimization when used for tracking crowds.
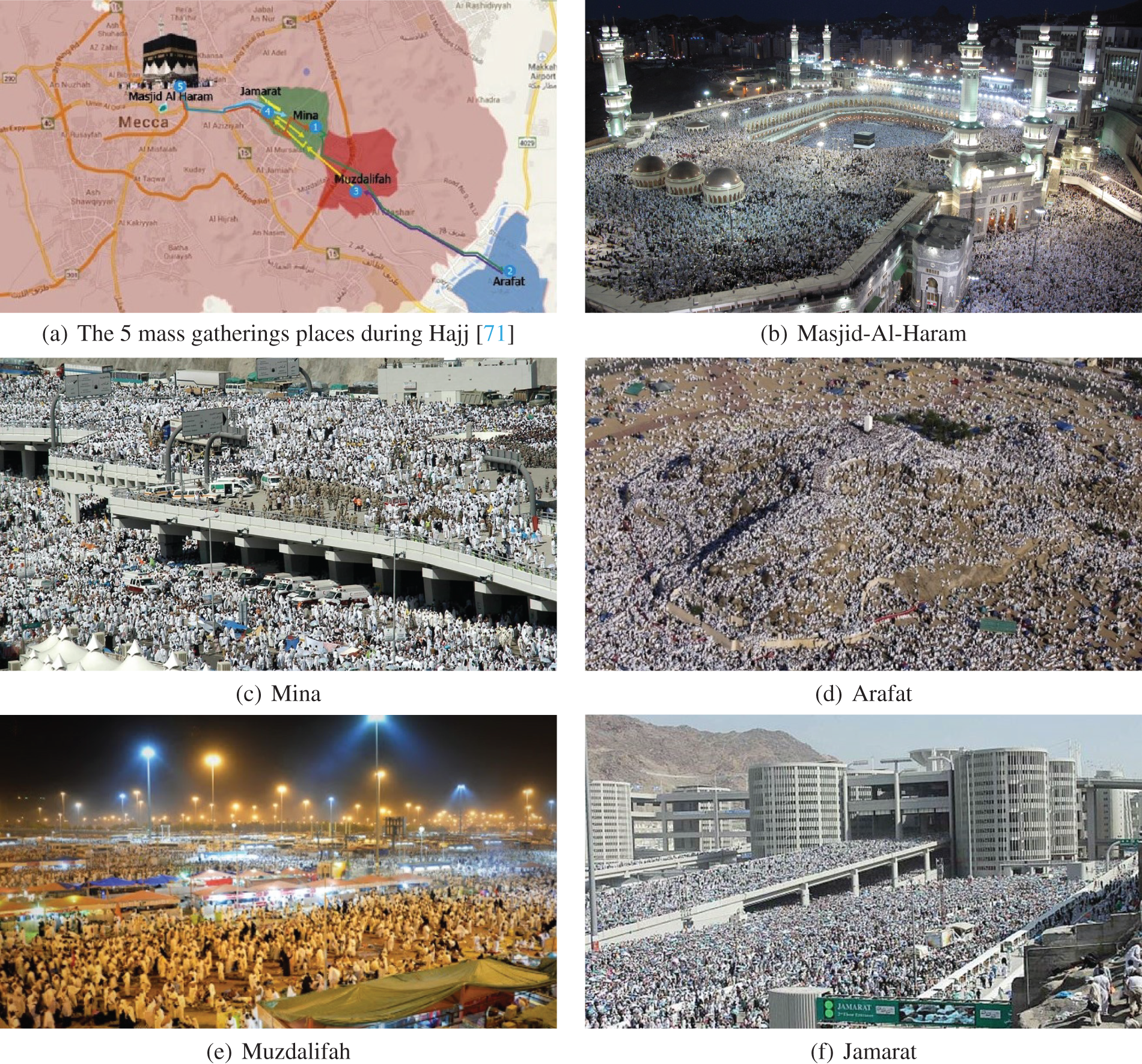
Figure 1: Mass gatherings places during Hajj period
In order to ensure cost-saving, this study proposed a binary linear program (BLP) to optimize the used UAVs when periodically tracking a set of moving crowds in a determined/bordered open crowded area (OCA) (i.e., a geographical zone with known borders/dimensions and without obstacles where a number of close crowds navigate). Two main objectives were considered, namely the minimization of the UAVs traveled time and the reduction of their energy consumption taking into account their architecture, the crowds characteristics, and power management. Several scenarios were also simulated to prove that the proposed BLP is efficient and can be integrated into many CMA systems using UAVs during crowded events like religious gatherings [31,36,76,77], mass sports events [78,79], social festivals [80], among others. Based on the obtained results, we suggested a set of open research challenges to better improve the optimality of the crowd tracking domain in CMA systems.
The remainder of the paper is structured as follows: Section 2 discussed the literature review of relevant works dealing with crowd tracking systems using UAVs in order to point out their limitations and highlight the importance of our contribution. Section 3 introduced the considered system model of the periodic crowd tracking using UAVs, the different used parameters and variables, and the proposed BLP together with its linear constraints and objective functions. In order to evaluate its performance, Section 4 reported on the computational results obtained by the application of the suggested BLP in the different scenarios of the periodic crowd-tracking problem. Section 5 provided a set of open challenges and perspectives for future works. Section 6 drew the main conclusions of the study.
A good number of the existing works and approaches in the literature tackle one of the five domains, classified in [21], of CMA systems using UAVs. However, only a few works dealt with the crowd-tracking domain, the focus of our present study, since each of these works refers to the crowd tracking problem from a specific point of view.
In [66], the authors provided an efficient procedure to detect and track a 2D/3D-object using computer vision and image processing technologies, where each tracked object can be considered as a crowd or any other moving object. The proposed procedure is characterized by its computational robustness, and optimized time calculation, but was specifically applied to the military field.
Wang et al. [49] proposed a dynamic-data-driven planning and control framework using collaborative UAVs and unmanned ground vehicles (UGVs). Their suggestion provides three dependent tasks namely crowd motion modeling, crowd motion detection, and crowd motion tracking and controlling. To track crowds, they use the well-known Kalman digital filter [81], also known as linear quadratic estimation (LQE). This allows the prediction of future system states based on past estimations. In [65], the authors extend the proposed framework in [49] by incorporating a multi-resolution data approach, where a grid-based method [82,83] is developed to model crowd motion with UAVs low-resolution global perception. Additionally, an auto-regressive model is employed to model individuals motion based on UGVs detailed perception.
All the above-cited works miss the optimization aspect when tracking target objects or crowds. To the best of our knowledge, de Moraes et al. [64] were pioneers integrating optimization techniques in their tracking mechanism. They proposed a UAVs-based system, that periodically monitors gathered walking individuals, where they integrated auction paradigms and genetic algorithms to distribute UAVs among crowds/targets and calculate the best order to visit them. According to an effective simulation analysis, the authors proved the capabilities, efficiency, and robustness of their system to perform surveillance, visit all targets during a supervising period, minimize the time between visits to each target, and preserve performance and stability under a variety of scenarios.
A second and recent work that considers optimization features was undertaken by Trotta et al. [63]. In this study, the authors proposed an aerial tracking system that deploys a swarm of UAVs for continuous video capture of mobile ground targets. The challenging issues raised in this work deal with energy management, scenario coverage, and multi-device task coordination. To face these issues, they proposed a framework, called PERCEIVE, that considers a modular chain of functionalities to perform crowd mobility prediction, UAVs charging schedules, and mobile charging stations (MCSs) mobility updates. The results showed the capability, efficiency, and robustness of their framework via experimental measurements of an MCS prototype and an extensive and effective simulation analysis on a city-scale monitoring scenario. Regarding the integrated UAV replenishment service, they used a probabilistic charging scheduling algorithm taking into account both UAVs residual energy and the quality of service (QoS) of the system. Concerning the UAVs and MCSs mobility management, they used swarm mobility algorithms based on the potential field force model. The underlying reasons were to maximize the number of targets covered by UAVs and minimize charging operations overhead.
All state-of-the-art contributions, that consider the crowd tracking domain using UAVs, were proposed for a specific application of aerial video surveillance. Even if some works considered the optimization aspect to efficiently track crowds, none of them took into consideration the minimization of the total distance/time traveled by UAVs and the total energy consumed by UAVs via assigning the best set of UAVs for each crowd. Additionally, there is no formal optimization model that can be easily adapted by any CMA system using crowd tracking via UAVs in the literature. The last two issues lead us to the main challenge to face within the current contribution. In this study, we proposed a generic BLP model that optimally assigns UAVs to Crowds in order to enhance the crowd-tracking function offered by a CMA system. Many input parameters are related to OCA characteristics, UAVs features and Crowds behavior. These parameters are outlined and sensitively analyzed to emphasize their impact on the crowd-tracking function of a given CMA system.
3 Model for the Periodic Crowd Tracking Using UAVs
In this section, we first introduced the considered assumptions to define the periodic crowd tracking (PCT) problem using UAVs. Then, we defined the parameters and decision variables used to formulate the linear constraints and objective functions to build the proposed BLP in order to solve the PCT problem.
3.1 Assumptions and Definitions
As mentioned in the previous sections, this study mainly focused on the crowd-tracking domain of CMA systems using UAVs. We assumed that we already had the mechanisms and prediction modules that provided, the following information at each instant:
(i) The characteristics of the OCA to be supervised by the CMA such as shape, area, and border dimensions.
(ii) The list of charging stations (CSs) that are considered to supply energy to the UAVs. Each CS is characterized by its mobility (fixed or mobile), position (latitude and longitude), and capacity in terms of supported number of UAVs.
(iii) The list of identified crowds, their positions (latitude and longitude), shapes, areas, cardinalities, densities (number of persons at each squared meter) that depends on the crowds areas and cardinalities, constant speeds that depend on the crowd density, and demands defined by the minimum number of needed UAVs for each crowd.
(iv) The number of available UAVs in the fleet and their characteristics such as current positions (latitude and longitude), statuses (flying to supervise a crowd, charging in a CS or idle in a CS), energy (batteries) level, constant speeds, and energy (power) charging/discharging functions.
Based on the previous assumptions, the PCT problem is solved periodically (i.e., when UAVs reallocation is needed) in order to satisfy the different crowds demands. This was achieved through assigning the required UAVs for each crowd at the beginning of each period depending on the energy/position variations of each UAV and the crowds movements. The UAVs/crowds assignment process has also to respect some rules such as:
• A UAV can be assigned to only one crowd during a given period.
• A UAV cannot be assigned to a crowd if its energy is not enough to supervise the corresponding crowd during the whole current period, and then returns to the nearest available CS.
• A flying UAV should go back to an available CS if it is not assigned to a crowd in a given period.
The PCT problem using UAVs consists of periodically reallocating the needed number of heterogeneous UAVs to the mobile identified crowds. This is to ensure a continuous efficient coverage while minimizing the UAVs moves in order to reduce energy consumption. Fig. 2a shows the initial system state where ten UAVs remain on the two CSs and the five crowds are not covered. Fig. 2b displays the system state where the PCT problem solver is applied on the initial state to obtain the optimal coverage during the first period (Period 1). During this period, six UAVs are used to ensure the crowds coverage. After solving the PCT at the end of Period 1, we obtained a new reallocation UAVs/crowds to get a new system state during the second period (Period 2) as shown in Fig. 2c. We can see that the number of crowds is reduced to four due to the merge of two crowds. Also, the number of needed UAVs is reduced when allowing one UAV to rejoin a CS.
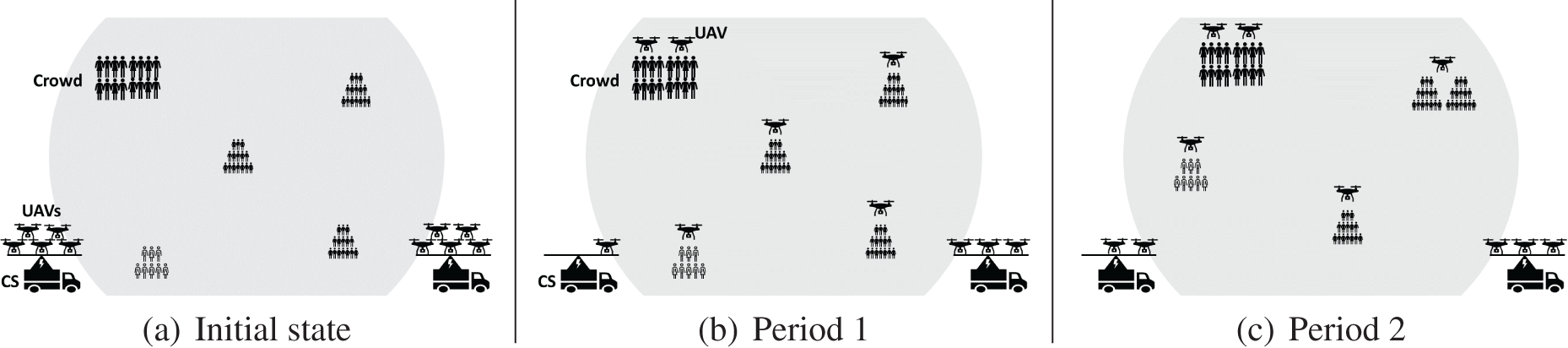
Figure 2: Scenario of three periods
Let C be the total time of a given OCA life cycle and
•
•
–
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
–
∗
∗
∗
∗
∗
∗
where
∗
–
∗
∗
∗
∗
∗
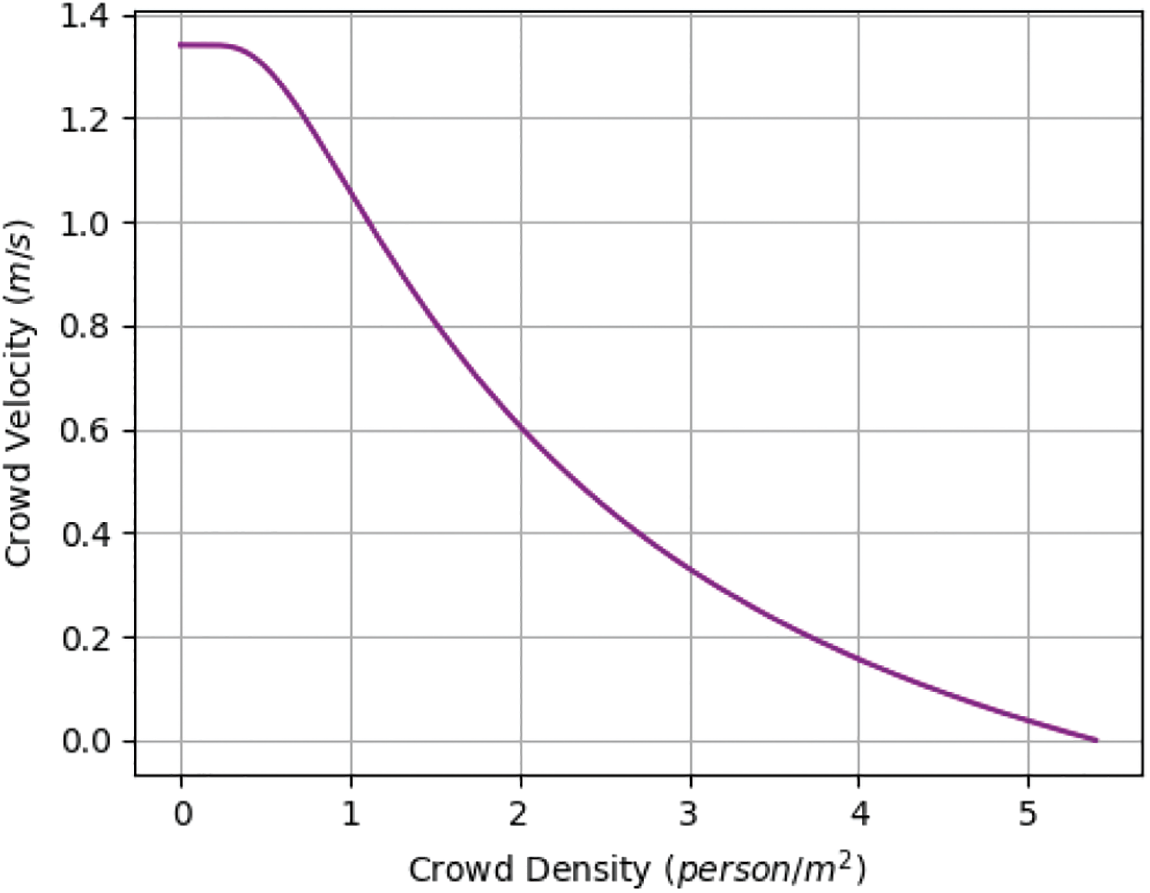
Figure 3: Weidmann’s fundamental diagram. The plot of the density-speed relation according to Weidmann’s fundamental diagram function of Eqs. (4) and (5) [84]
Based on the considered parameters and decision variables described in Sections 3.2 and 3.3, we considered the following decision variables of the BLP for the PCT
•
•
We defined two objective functions for the PCT
• The first objective (ref. Eq. (6)) considers the minimization of the total time consumed by all UAVs movements during their transition from a period
• The second objective (ref. Eq. (7)) considers the minimization of the total energy loss of all UAVs during their transition between the two successive periods
Based on the considered assumptions, parameters, and decision variables described in Sections 3.1–3.3, we considered the following constraints applied by the BLP solver of PCT
Constraints (8) ensure that each UAV should be assigned to only one crowd or only one charging station.
Constraints (9) ensure that the remaining energy
Constraints (10) ensure that the energy of each UAV
Constraints (11) ensure that each crowd demand in a period
3.5.3 Charging Station Constraints
Constraints (12) ensure that the number of UAVs in a charging station during a period
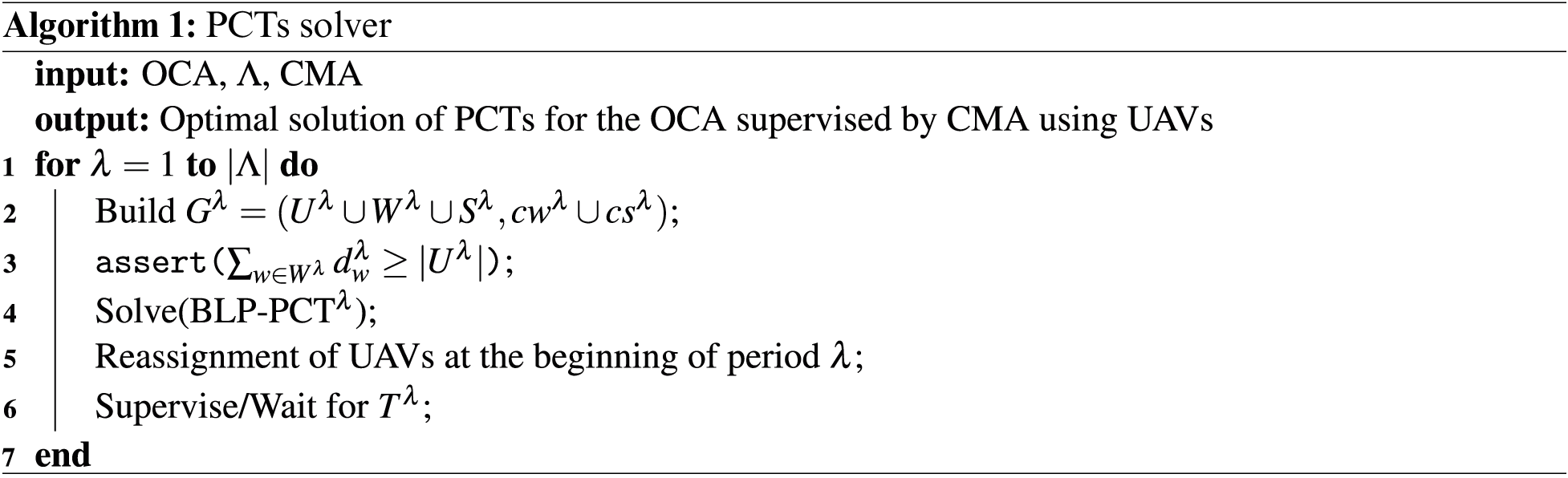
3.6 PCTs Solver Using the BLP Model
Solving the PCT
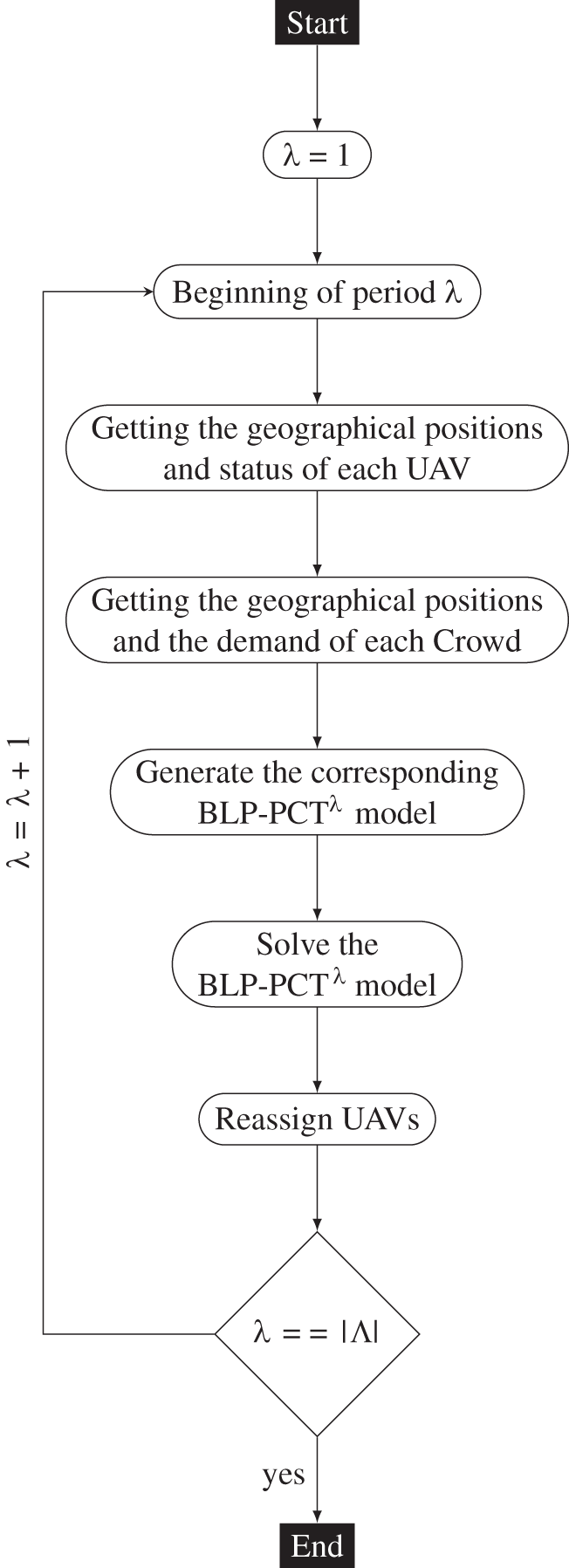
Figure 4: Processing diagram of PCT instances
4 Simulation and Computational Results
Experimental tests were carried out to evaluate the performance of the PCTs solver presented by Algorithm 1. To assess its efficiency, we reported experimental results obtained by the simulation of the PCTs solver on different sets of the PCT problem instances. This section was divided into three subsections. In Section 4.1, we introduced the PCTs instances generated to evaluate the solver performance, then we described our experimental environment settings. In Section 4.2, we revealed the experimental results obtained by the simulation of the PCTs solver, as described in the Section 3, then we discussed its ability to solve PCTs instances under different scenarios and its performance in terms of computational time. To highlight the importance of the initial infrastructure investment in terms of UAVs and CSs availability, in Section 4.3, we detailed the sensitivity analysis of the two considered objective functions according to different scenarios. We start this analysis by showing the behavior of these objective functions according to the variation of UAVs and CSs availability. This analysis showed that the initial infrastructure of a CMA system should be carefully chosen in order to reduce energy and time costs. Then, we introduced the impact of the instances granularity level determined by the BLP-PCT
4.1 PCTs Instances and Experimental Settings
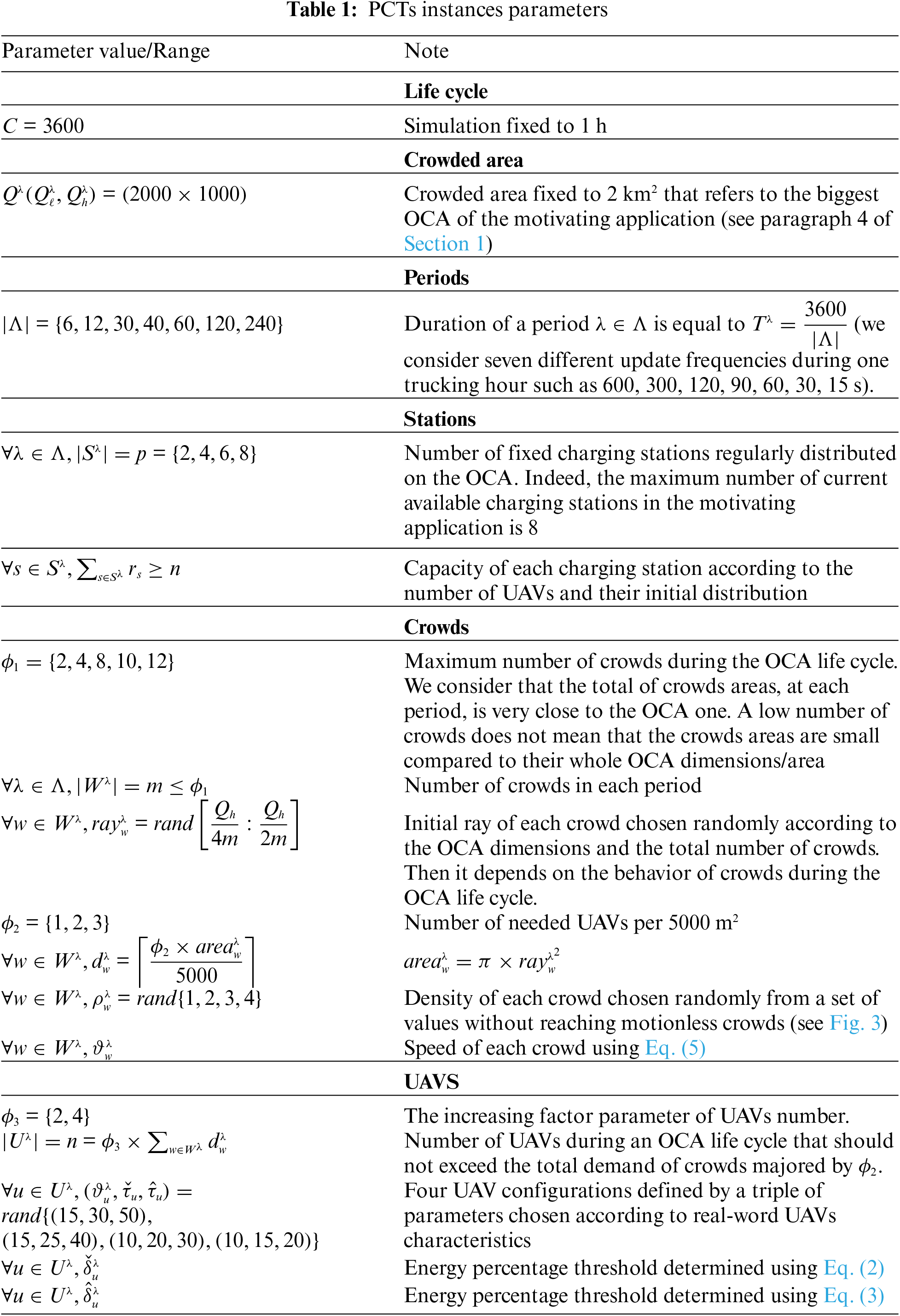
To the best of our knowledge, in the literature, there is a lack of accessible generic and diversified use cases and instances of the PCT problem. For this main reason and to effectively evaluate the performance of the PCTs solver, we generated a set of 840 PCTs instances under different scenarios. All these instances are generated under a fixed 1-h OCA life cycle (
• The number of periods
• The number of charging stations
• The maximum number of crowds
• The number of required UAVs per 5000 m2 noted
• The total number of UAVs is determined by increasing the total demand of all crowds by a coefficient
In order to generate the whole set of 840 PCT instances, the values of the quintuple
4.1.2 Experimental Settings and Metrics
The PCTs solver is implemented in Python programming language. The outlined BLP-PCT
We empirically evaluated our PCTs solver on the instances set described in Section 4.1.1. In order to discuss the added value of its use, we considered the following metrics to evaluate the PCTs solver performance:
•
•
•
•
•
4.2 Simulation Results and PCTs Solver Performance
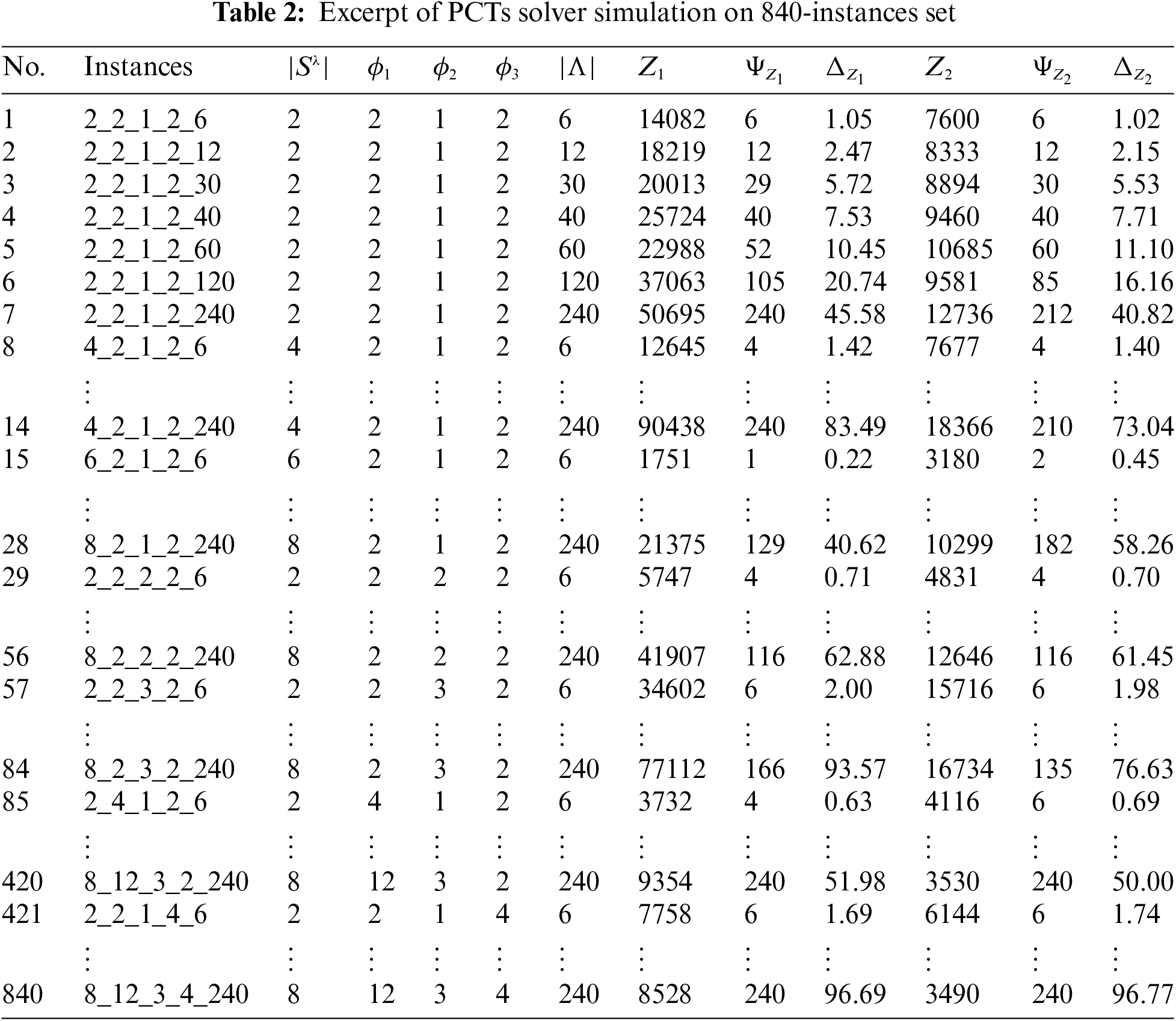
Table 2 displays an excerpt of the results obtained by applying the PCTs solver on the 840-instances set described in Section 4.1.1 according to the metrics described in Section 4.1.2. All the global simulation results file as well as the detailed results of each instance under the two considered objective functions are available to download through the below link8. Instances names follow the pattern (
4.2.1 PCTs Solver Coverage Ability
When applying the PCTs solver on a given instance with
Fig. 5 shows the PCTs solver coverage ability
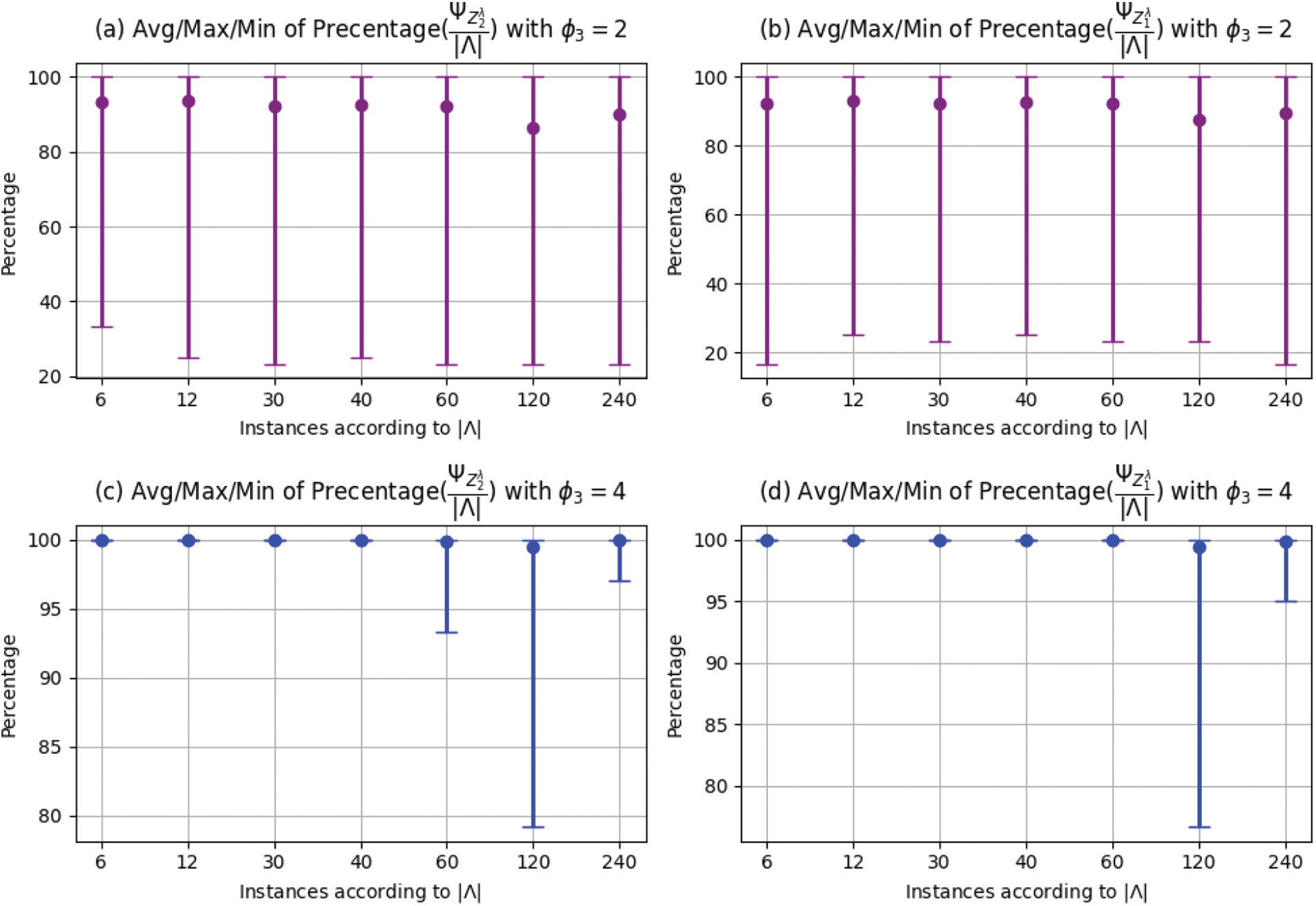
Figure 5: Ability of PCTs solver in terms of periods coverage
Figs. 5a–5d show the average, maximum, and minimum
Fig. 6 displays the PCTs solver coverage ability according to the considered objective function and the number of stations
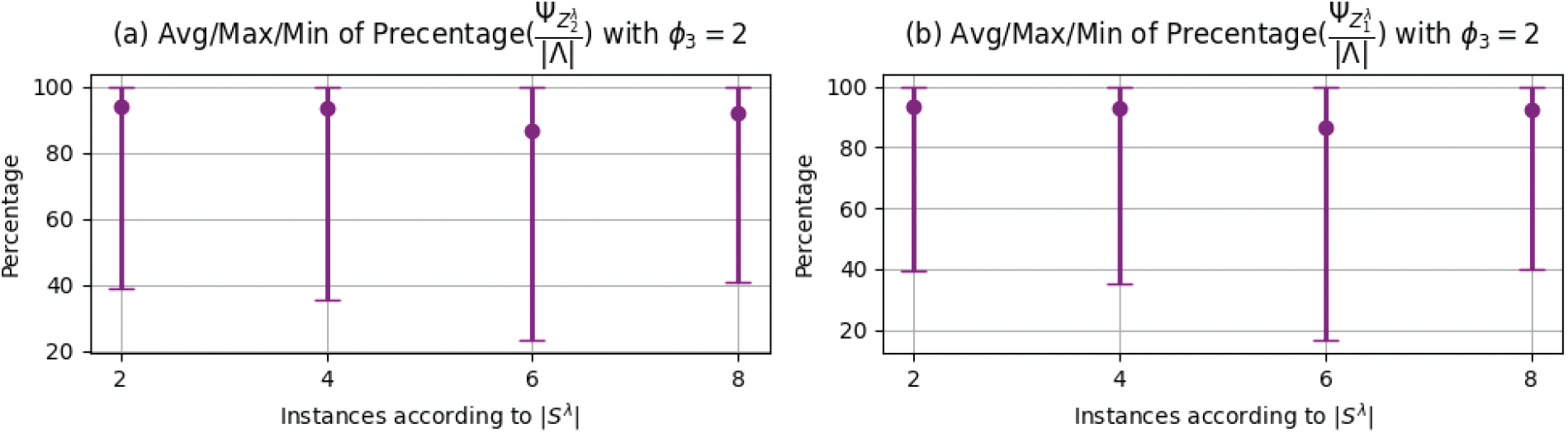
Figure 6: Ability of PCTs solver in terms of periods coverage
Fig. 7 shows the PCTs solver coverage ability according to the considered objective function and the maximum number of crowds at each period determined by
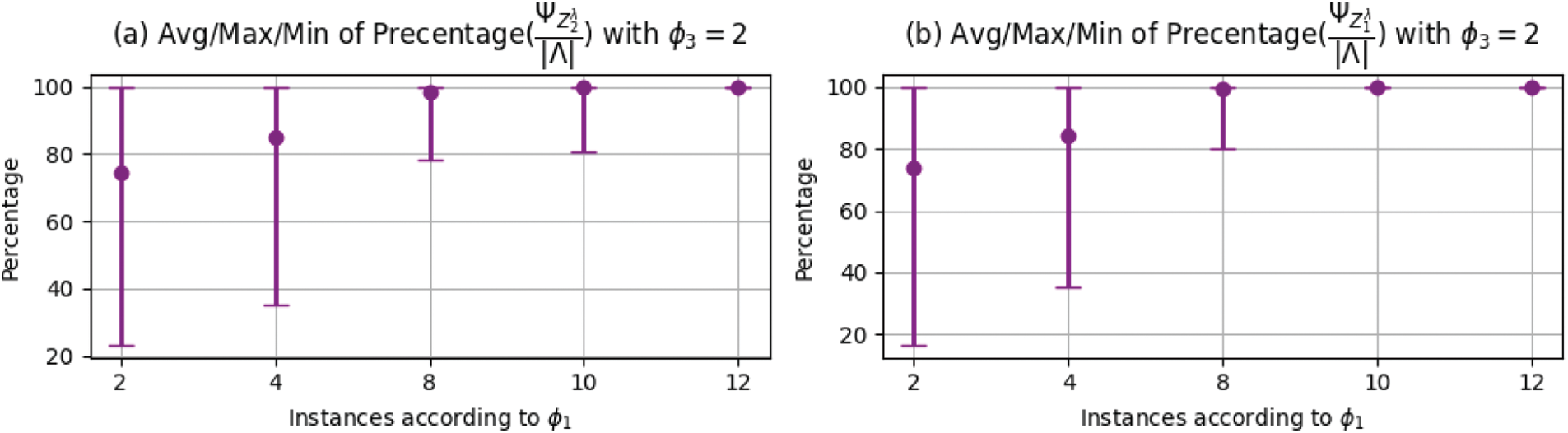
Figure 7: Ability of PCTs solver in terms of periods coverage
4.2.2 PCTs Solver Computation Performance
It is worth reminding that solving BLP-PCT
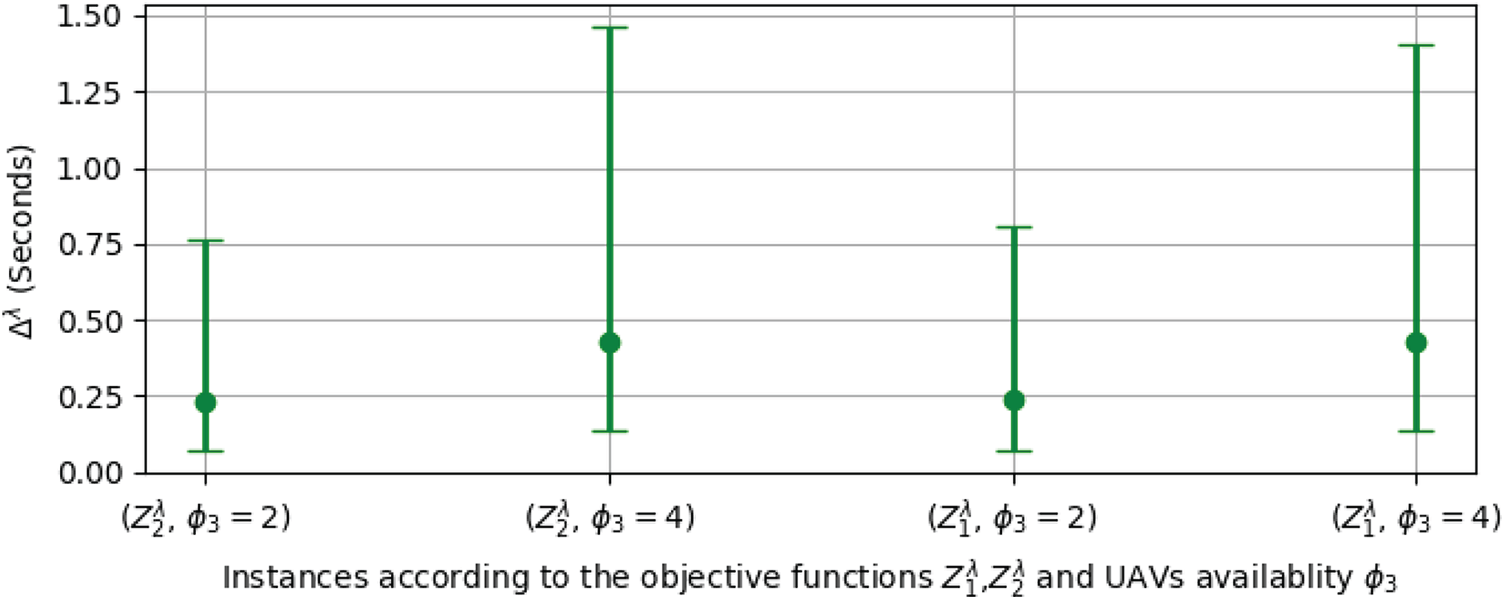
Figure 8: CPU-time consumption
Figs. 9a–9d represent the average, maximum, and minimum CPU-time
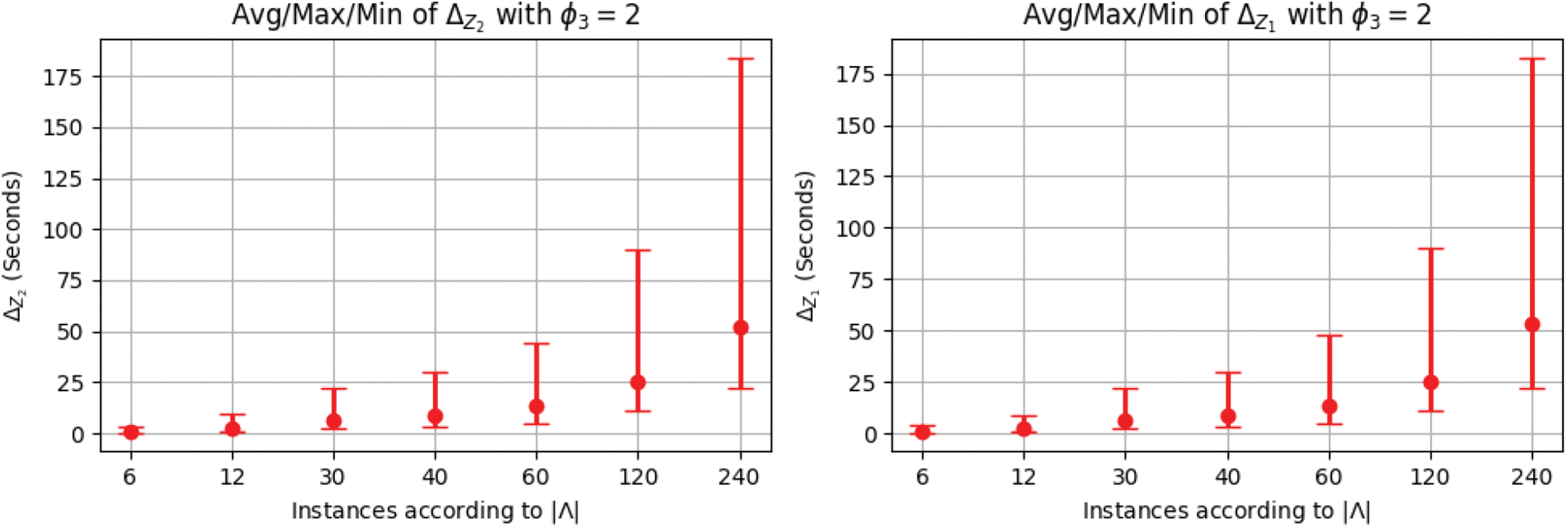
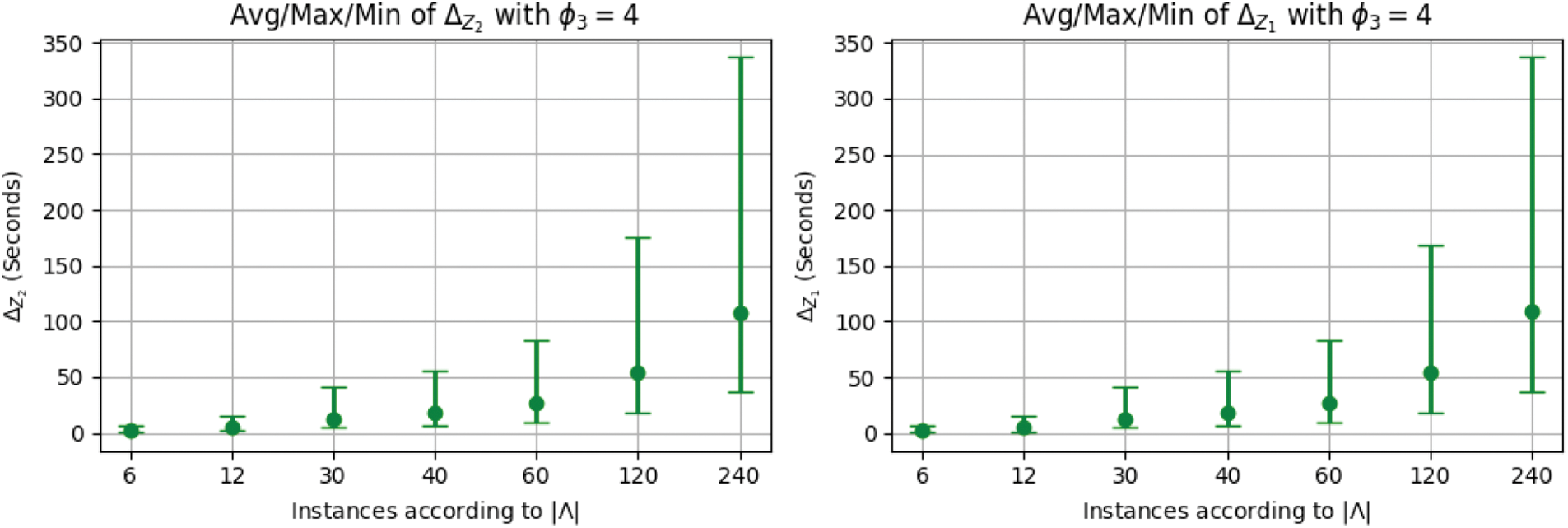
Figure 9: CPU-time consumption
4.3 Objective Functions Sensitivity Analysis
The initial investment in the infrastructure of a given CMA system in terms of UAVs and CSs is very important to be able to provide a high QoS level. Also, it determines its competitiveness level in the market. The two major considered criteria to evaluate a CMA performance are its dissipated energy and its response time for any request. The response time criteria can be evaluated by the time consumed by a solver to provide new distribution/assignment of UAVs over the OCA, already discussed in Section 4.2.2, and the time consumed by all UAVs to rejoin their new positions provided by the solver.
The two considered objective functions
4.3.1 UAVs Availability Impact Analysis
Fig. 10, reports on the two objective functions variation
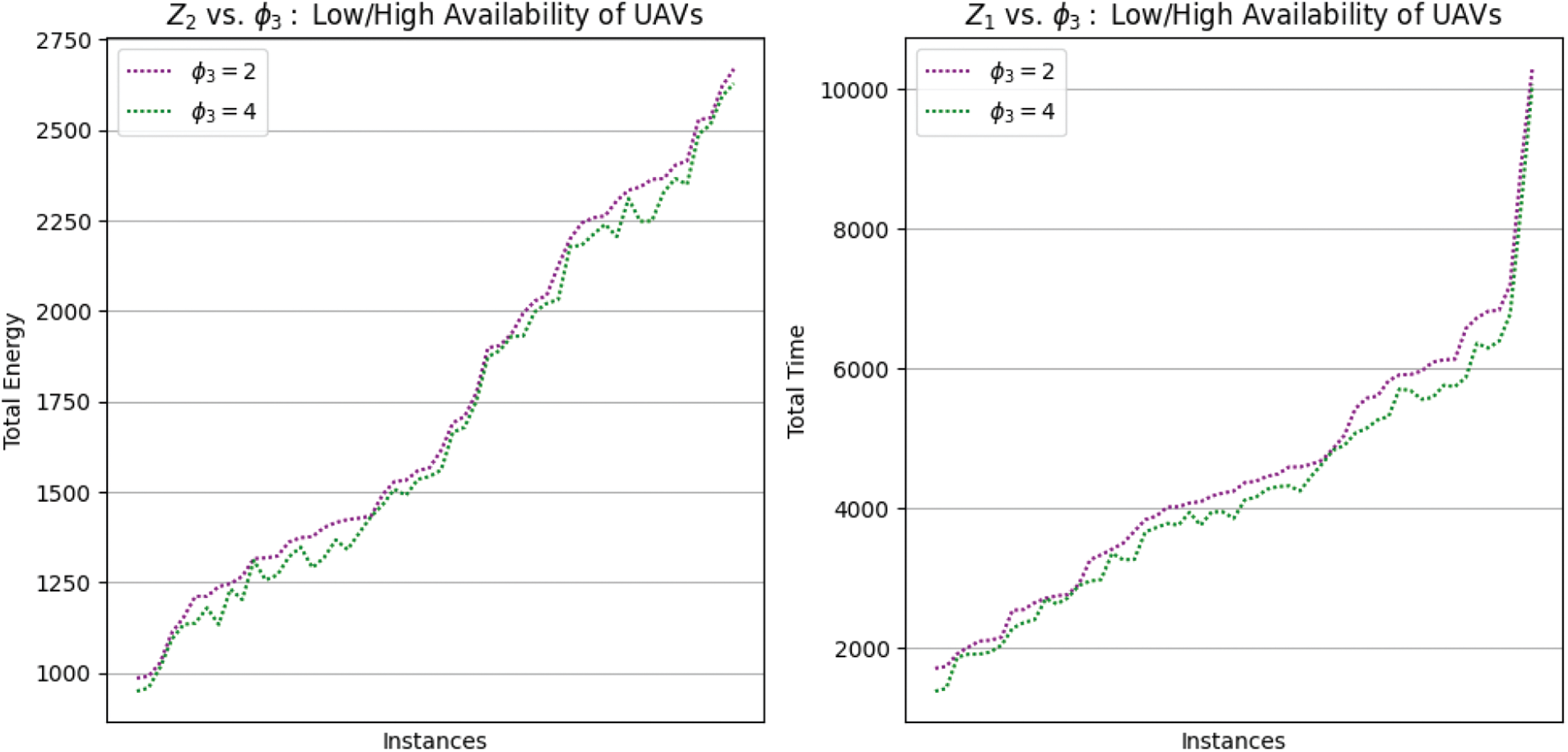
Figure 10: Energy and time sensitivities vs. UAVs availability
4.3.2 CSs Availability Impact Analysis
Fig. 11 reports on the objective function values
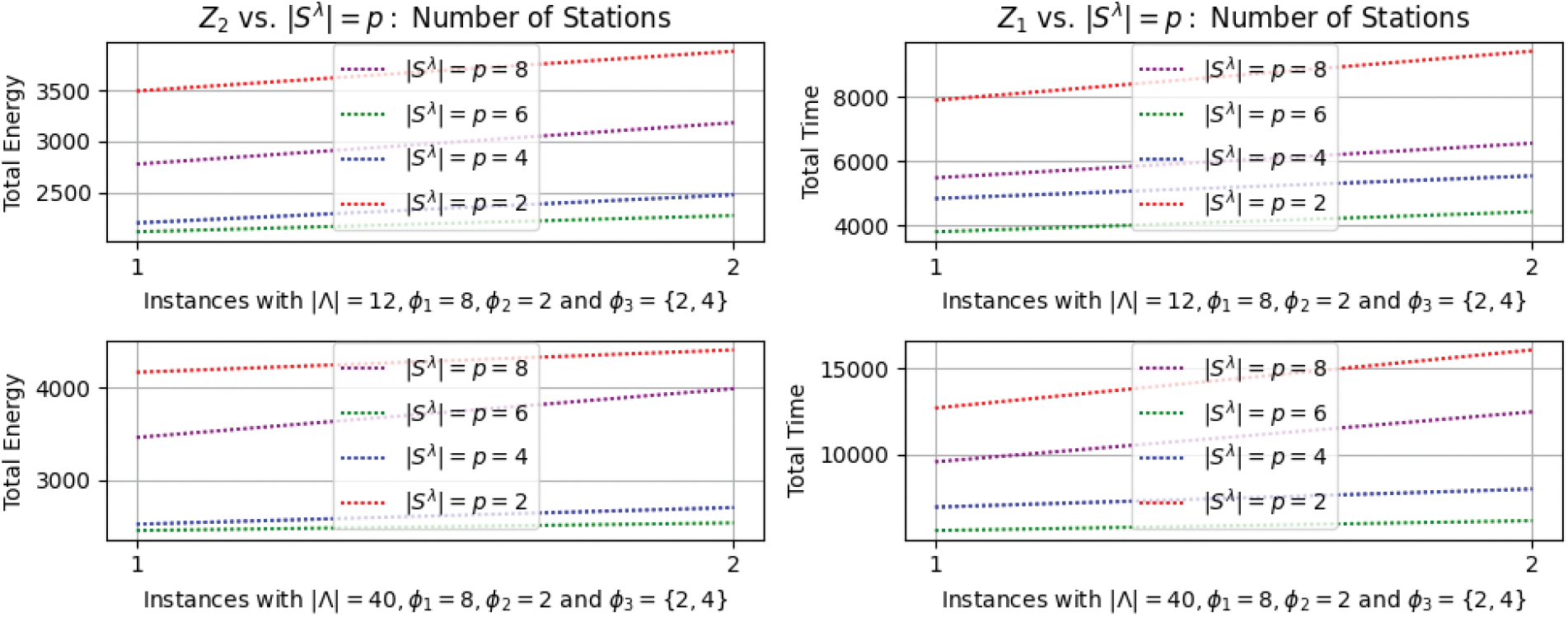

Figure 11: Energy and time sensitivities vs. number of stations
4.3.3 Granularity Level Impact Analysis
Apart from the initial CMA system cost, there is a very important parameter that affects the two objective functions. This parameter is the update frequency of UAVs positions, over the OCA and CSs, provided by the PCTs solver, and noted as granularity level. Fig. 12 shows the objective function values
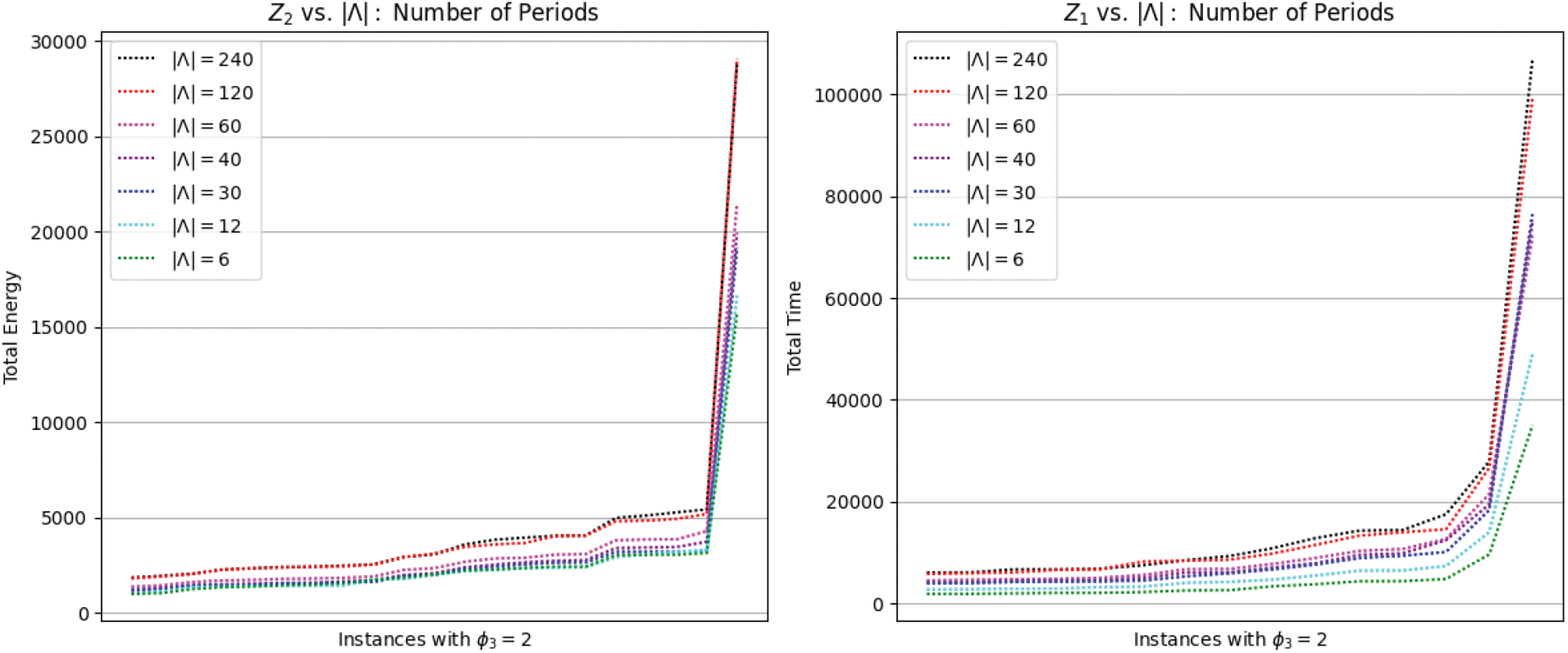
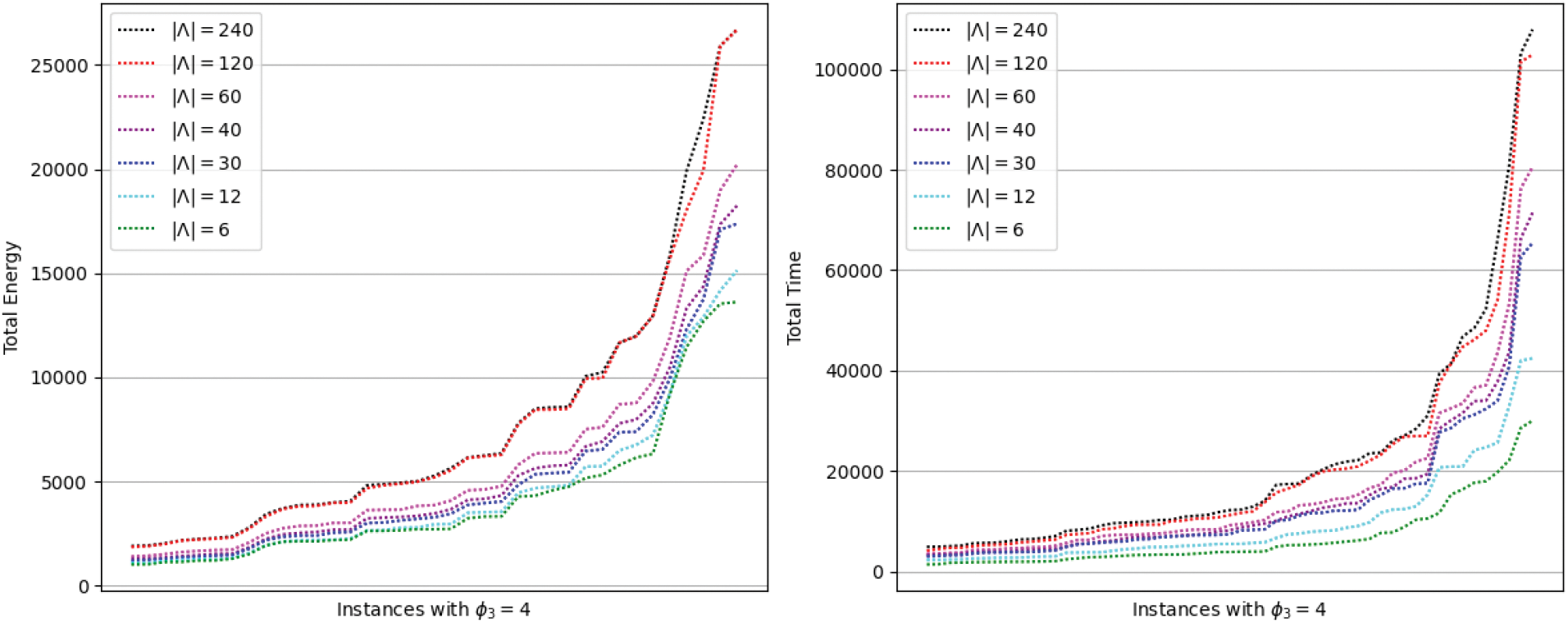
Figure 12: Energy and time sensitivities vs. granularity level (number of periods)
With a certain abstraction level in the context of CMA applications, we suggested the first attempt to formally model and optimally solve the PCT problem using drones. In order to study and analyze the PCTs solversensitivity, we defined a set of greatly important parameters in achieving optimality in terms of CMA infrastructure investment and maintenance, its QoS, service pricing, market competitiveness, among others. By simulating the PCTs solver on a set of diverse instances and then analyzing the obtained results, this section was devoted to enumerating a set of challenges to improve its optimality. In the sequel, we categorized these challenges according to the effective and influential aspects whose impact on PCT optimality had already been proven.
In the previous section, we referred to the important impact of UAVs availability and characteristics on the PCTs solver in terms of coverage ability, consumed CPU-time, and obtained objective function value. According to these issues, we can report the following challenges:
• The UAVs availability has an important impact on the PCTs solver coverage ability. In fact, providing a huge number of UAVs would not be a good idea since it would affect the CPU solving-time as well as the CMA initial investment in terms of infrastructure. Consequently, studying the optimal UAVs number in the initial fleet might be a challenge to allow facing this drawback. This type of issues has already been widely investigated in the literature in the context of Vehicle Routing Problem (VRP) [87]. The main specificity that characterizes the PCT problem from that of the VRP is that the characteristics and behavior of crowds are unpredictable which affects the UAVs need. However, the literature involves many proposed methods that can be used to predict crowds characteristics and behavior based on machine learning techniques [35,43,53,57,60–62,67,68].
• Even if the UAVs availability and characteristics are initially studied based on crowds prediction, the PCTs solver can not cover all the OCA periods. Indeed, by solving the BLP-PCT
• Balancing the UAVs use can be also considered as an additional challenge to the improved BLP since it involves a set of special objectives or constraints. Indeed, focusing only on the use of a specified kind of UAVs while others, may cause some UAVs maintenance extra cost. Many balancing optimization techniques have already been used in the literature to balance the resources use when solving optimization problems [89–91].
We have already shown that the CSs availability has an impact on the UAVs energy and time consumption. In some cases, the CSs availability and location affect both energy and time consumption. To avoid such an issue, we propose investigating the following challenges:
• Studying the CSs initial locations tacking into account the crowds behavior and characteristics focusing on a better initial and future UAVs distribution over CSs. Some machine learning techniques, proposed in UAVs related challenges, can be used to achieve this objective. Many analog works in the literature related to the optimization of the Facility Location Problem (FLP) [92–94] can be considered while dealing with this issue.
• Fixed CSs locations may cause UAVs to consume a lot of energy and time during the whole OCA coverage process. Mobile CSs, can be a very interesting study issue to reduce energy and time consumption and decrease the initial CMA infrastructure costs by controlling the number of UAVs and CSs. Some research works have already tried to propose a system with mobile CSs, no such a formal optimal model has been conceived [63,95]. This is an additional issue to the other UAVs-related challenges in order to efficiently optimize the UAVs online distribution and then their future availability.
• The BLP improvement challenge, suggested in the previous section, can also be enhanced by the CSs mobile location to ensure UAVs the availability.
5.3 Granularity Level-Related Challenges
The granularity level impact analysis, performed in Section 4.3.3, proves that the update frequency of UAVs locations has a very important impact on energy and time consumption. We also noticed that the increasing of this frequency does not necessarily imply an increase in UAVs energy and time consumption. Therefore, we suggested an open challenge that consists of a technique that minimizes the granularity level (reduce the update frequency) in order to reduce the energy and time consumption without losing the QoS provided by a CMA system. This challenge aims to reduce the service pricing and increase the competitiveness of the system over the market. On the other hand, reducing the number of periods
In this paper, a PCTs solver was proposed to periodically solve the PCT using UAVs. This can be embedded in a CMA system using UAVs to provide a crowd-tracking service while ensuring an adequate QoS. The review of the literature allowed us to recognize that all the related works, in the field of crowd tracking, consider only a specified application of the crowd monitoring and analysis systems. In addition, we also diagnosed another gap that consists of a lack of formal and generic models to solve the crowd tracking problem. Consequently, we proposed a BLP to optimally solve the PCT. This model is based on several assumptions and parameters that were thoroughly defined and studied. To assess the performance of the PCTs solver, we provided a set of 840 diversified PCTs instances. The computational results, obtained by the simulation of the PCTs solver on these instances, led us to evaluate the first attempt to formally model the PCT and periodically solve it. Furthermore, we suggested a set of open challenges to enhance its solving capabilities. These potential new challenges were recognized based on many criteria related to the OCA characteristics and the initial infrastructure cost of such a CMA system using UAVs.
Acknowledgement: The authors extend their appreciation to the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work. They also thank the editor and the anonymous referees who have provided valuable comments on an earlier version of this paper. They would also like to show their gratitude to Dr. Jamel Mtawaa (English Faculty Member at the University of Jeddah, KSA) for the English proofreading of the last version of this paper.
Funding Statement: This work was supported by the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia under Grant No. MoE-IF-G-20-08.
Author Contributions: Kalil Chebil: Methodology, Data Curation, Software, Validation, Writing-Review & Editing. Skander Htiouech: Investigation, Data Curation, Visualization, Supervision, Project administration, Funding Acquisition, Writing-Review & Editing. Mahdi Khemakhem: Conceptualization, Methodology, Formal Analysis, Writing-Original Draft.
Availability of Data and Materials: The detailed PCTs solver simulation results and solutions on the generated 840-instances set are available via https://shortest.link/38ZH.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1According to the Saudi General Authority for Statistics https://www.stats.gov.sa/sites/default/files/haj_40_en.pdf.
2https://www.gnu.org/software/glpk/.
3https://www.ibm.com/sa-en/analytics/cplex-optimizer.
5https://www.gams.com/products/solvers/.
6The PCTs 840-instances set is available via https://shortest.link/38ZH.
7https://www.ibm.com/docs/en/icos/12.9.0?topic=cplex-list-parameters.
8The global and detailed PCTs solver simulation results and solutions on the 840-instances set are available via https://shortest.link/38ZH.
References
1. Valavanis, K. P., Vachtsevanos, G. J. (2015). Handbook of unmanned aerial vehicles. Dordrecht: Springer Netherlands. [Google Scholar]
2. Cupp, C. M., Levine, P. (1998). The DTIC review. Unmanned aerial vehicles, vol. 4, no. 2, 19980826172. Defense Technical Information Center Fort Belvoir Va. [Google Scholar]
3. Chen, L., Liu, W. -L., Zhong, J. (2022). An efficient multi-objective ant colony optimization for task allocation of heterogeneous unmanned aerial vehicles. Journal of Computational Science, 58(21), 101545. https://doi.org/10.1016/j.jocs.2021.101545 [Google Scholar] [CrossRef]
4. Akbari, Y., Almaadeed, N., Al-maadeed, S., Elharrouss, O. (2021). Applications, databases and open computer vision research from drone videos and images: A survey. Artificial Intelligence Review, 54(5), 3887–3938. https://doi.org/10.1007/s10462-020-09943-1 [Google Scholar] [CrossRef]
5. Li, X., Savkin, A. V. (2021). Networked unmanned aerial vehicles for surveillance and monitoring: A survey. Future Internet, 13(7), 174. https://doi.org/10.3390/fi13070174 [Google Scholar] [CrossRef]
6. Kakaletsis, E., Symeonidis, C., Tzelepi, M., Mademlis, I., Tefas, A. et al. (2021). Computer vision for autonomous UAV flight safety: An overview and a vision-based safe landing pipeline example. ACM Computing Surveys, 54(9), 1–37. [Google Scholar]
7. Dilshad, N., Hwang, J., Song, J., Sung, N. (2020). Applications and challenges in video surveillance via drone: A brief survey. Proceedings of the 11th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea. [Google Scholar]
8. Alladi, T., Chamola, V., Sahu, N., Guizani, M. (2020). Applications of blockchain in unmanned aerial vehicles: A review. Vehicular Communications, 23(2), 100249. https://doi.org/10.1016/j.vehcom.2020.100249 [Google Scholar] [CrossRef]
9. Gupta, A., Afrin, T., Scully, E., Yodo, N. (2021). Advances of UAVs toward future transportation: The state-of-the-art, challenges, and opportunities. Future Transportation, 1(2), 326–350. https://doi.org/10.3390/futuretransp1020019 [Google Scholar] [CrossRef]
10. Rojas Viloria, D., Solano-Charris, E. L., Muñoz-Villamizar, A., Montoya-Torres, J. R. (2021). Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. International Transactions in Operational Research, 28(4), 1626–1657. https://doi.org/10.1111/itor.12783 [Google Scholar] [CrossRef]
11. Outay, F., Mengash, H. A., Adnan, M. (2020). Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transportation Research Part A: Policy and Practice, 141(3), 116–129. https://doi.org/10.1016/j.tra.2020.09.018 [Google Scholar] [PubMed] [CrossRef]
12. Alsamhi, S. H., Afghah, F., Sahal, R., Hawbani, A., Al-qaness, A. et al. (2021). Green internet of things using UAVs in B5G networks: A review of applications and strategies. Ad Hoc Networks, 117(2), 102505. https://doi.org/10.1016/j.adhoc.2021.102505 [Google Scholar] [CrossRef]
13. Alzahrani, B., Oubbati, O. S., Barnawi, A., Atiquzzaman, M., Alghazzawi, D. (2020). UAV assistance paradigm: State-of-the-art in applications and challenges. Journal of Network and Computer Applications, 166(1), 102706. https://doi.org/10.1016/j.jnca.2020.102706 [Google Scholar] [CrossRef]
14. Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H. (2021). Humanitarian drones: A review and research agenda. Internet of Things, 16(1), 100434. https://doi.org/10.1016/j.iot.2021.100434 [Google Scholar] [CrossRef]
15. Panday, U. S., Pratihast, A. K., Aryal, J., Kayastha, R. B. (2020). A review on drone-based data solutions for cereal crops. Drones, 4(3), 41. https://doi.org/10.3390/drones4030041 [Google Scholar] [CrossRef]
16. Boursianis, A. D., Papadopoulou, M. S., Diamantoulakis, P., Liopa-Tsakalidi, A., Barouchas, P. et al. (2020). Internet of Things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet of Things, 18, 100187. [Google Scholar]
17. Saraf, V., Senapati, L., Swarnkar, T. (2021). Application and progress of drone technology in the COVID-19 pandemic: A comprehensive review. In: Computational modeling and data analysis in COVID-19 research, vol. 1, pp. 47–66. [Google Scholar]
18. Hiebert, B., Nouvet, E., Jeyabalan, V., Donelle, L. (2020). The application of drones in healthcare and health-related services in North America: A scoping review. Drones, 4(3), 30. https://doi.org/10.3390/drones4030030 [Google Scholar] [CrossRef]
19. Devi, G., Sowmiya, N., Yasoda, K., Muthulakshmi, K., Balasubramanian, K. (2020). Review on application of drones for crop health monitoring and spraying pesticides and fertilizer. Journal of Critical Reviews, 7, 667–672. [Google Scholar]
20. Park, S., Choi, Y. (2020). Applications of unmanned aerial vehicles in mining from exploration to reclamation: A review. Minerals, 10(8), 663. https://doi.org/10.3390/min10080663 [Google Scholar] [CrossRef]
21. Husman, M. A., Albattah, W., Abidin, Z. Z., Mustafah, Y. M., Kadir, K. et al. (2021). Unmanned aerial vehicles for crowd monitoring and analysis. Electronics, 10(23), 2974. https://doi.org/10.3390/electronics10232974 [Google Scholar] [CrossRef]
22. Hassanalian, M., Abdelkefi, A. (2017). Classifications, applications, and design challenges of drones: A review. Progress in Aerospace Sciences, 91(4), 99–131. https://doi.org/10.1016/j.paerosci.2017.04.003 [Google Scholar] [CrossRef]
23. Patil, V., Potphode, V., Potdukhe, U., Badgujar, V., Upadhyaya, K. (2022). Smart UAV framework for multi-assistance. In: ICT with intelligent applications, pp. 241–249. Singapore: Springer. [Google Scholar]
24. Kumar, A. (2021). Crowd behavior monitoring and analysis in surveillance applications: A survey. Turkish Journal of Computer and Mathematics Education (TURCOMAT), 12(7), 2322–2336. [Google Scholar]
25. Sindagi, V. A., Patel, V. M. (2018). A survey of recent advances in CNN-based single image crowd counting and density estimation. Pattern Recognition Letters, 107(3), 3–16. https://doi.org/10.1016/j.patrec.2017.07.007 [Google Scholar] [CrossRef]
26. Loy, C. C., Chen, K., Gong, S., Xiang, T. (2013). Crowd counting and profiling: Methodology and evaluation. In: Modeling, simulation and visual analysis of crowds, pp. 347–382. Princeton: Springer. [Google Scholar]
27. Mishra, A. K., Singh, P. (2022). Agile-LSTM: Acclimatizing convolution neural network for crowd behaviour analysis. In: Soft computing and signal processing, pp. 327–337. Singapore: Springer. [Google Scholar]
28. Khan, A., Aslam, S., Aurangzeb, K., Alhussein, M., Javaid, N. (2022). Multiscale modeling in smart cities: A survey on applications, current trends, and challenges. Sustainable Cities and Society, 78(2), 103517. https://doi.org/10.1016/j.scs.2021.103517 [Google Scholar] [CrossRef]
29. Ilgi, G. S., Ever, Y. K. (2020). Critical analysis of security and privacy challenges for the internet of drones: A survey. In: Drones in smart-cities, pp. 207–214. Mersin: Elsevier. [Google Scholar]
30. Mishra, B., Garg, D., Narang, P., Mishra, V. (2020). Drone-surveillance for search and rescue in natural disaster. Computer Communications, 156(2), 1–10. https://doi.org/10.1016/j.comcom.2020.03.012 [Google Scholar] [CrossRef]
31. Felemban, E., Sheikh, A. A., Naseer, A. (2021). Improving response time for crowd management in Hajj. Computers, 10(4), 46. https://doi.org/10.3390/computers10040046 [Google Scholar] [CrossRef]
32. Faragallah, O. S., Alshamrani, S. S., El-Hoseny, H. M., AlZain, M. A., Jaha, E. S. et al. (2022). Utilization of deep learning-based crowd analysis for safety surveillance and spread control of COVID-19 pandemic. Intelligent Automation and Soft Computing, 31(3), 1483–1497. https://doi.org/10.32604/iasc.2022.020330 [Google Scholar] [CrossRef]
33. Al-Sad, M., Kiranyaz, S., Ahmad, I., Sundell, C., Vakkuri, M. et al. (2022). A social distance estimation and crowd monitoring system for surveillance cameras. Sensors, 22(2), 418. https://doi.org/10.3390/s22020418 [Google Scholar] [PubMed] [CrossRef]
34. Masmoudi, N., Jaafar, W., Cherif, S., Abderrazak, J. B., Yanikomeroglu, H. (2021). UAV-based crowd surveillance in post COVID-19 era. IEEE Access, 9, 162276–162290. https://doi.org/10.1109/ACCESS.2021.3133796 [Google Scholar] [CrossRef]
35. Bouhlel, F., Mliki, H., Hammami, M. (2021). Crowd behavior analysis based on convolutional neural network: Social distancing control COVID-19. Proceedings of 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP), Setubal-Portugal. [Google Scholar]
36. Alabdulkarim, L., Alrajhi, W., Aloboud, E. (2016). Urban analytics in crowd management in the context of Hajj. Proceedings of 8th International Conference on Social Computing and Social Media (SCSM), Toronto, Canada. [Google Scholar]
37. Jiang, Y., Miao, Y., Alzahrani, B., Barnawi, A., Alotaibi, R. et al. (2021). Ultra large-scale crowd monitoring system architecture and design issues. IEEE Internet of Things Journal, 8(13), 10356–10366. https://doi.org/10.1109/JIOT.2021.3076257 [Google Scholar] [CrossRef]
38. Al-Sheary, A., Almagbile, A. (2017). Crowd monitoring system using unmanned aerial vehicle (UAV). Journal of Civil Engineering and Architecture, 11(11), 1014–1024. https://doi.org/10.17265/1934-7359/2017.11.004 [Google Scholar] [CrossRef]
39. Poon, K. H., Wong, P. K. Y., Cheng, J. C. (2022). Long-time gap crowd prediction using time series deep learning models with two-dimensional single attribute inputs. Advanced Engineering Informatics, 51(1), 101482. https://doi.org/10.1016/j.aei.2021.101482 [Google Scholar] [CrossRef]
40. Xu, J., Zhao, H., Min, W., Zou, Y., Fu, Q. (2022). DGG: A novel framework for crowd gathering detection. Electronics, 11(1), 31. https://doi.org/10.3390/electronics11010031 [Google Scholar] [CrossRef]
41. Papaioannidis, C., Mademlis, I., Pitas, I. (2021). Autonomous UAV safety by visual human crowd detection using multi-task deep neural networks. Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China. [Google Scholar]
42. Kakaletsis, E., Mademlis, I., Nikolaidis, N., Pitas, I. (2021). Multiview vision-based human crowd localization for UAV fleet flight safety. Signal Processing: Image Communication, 99, 116484. [Google Scholar]
43. Almagbil, A. (2019). Detecting and estimating the levels of crowd density from UAV imagery. Dirasat, Human and Social Sciences, 46(1), 294–309. [Google Scholar]
44. Tzelepi, M., Tefas, A. (2019). Graph embedded convolutional neural networks in human crowd detection for drone flight safety. IEEE Transactions on Emerging Topics in Computational Intelligence, 5(2), 191–204. https://doi.org/10.1109/TETCI.2019.2897815 [Google Scholar] [CrossRef]
45. Küchhold, M., Simon, M., Eiselein, V., Sikora, T. (2018). Scale-adaptive real-time crowd detection and counting for drone images. Proceedings of 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece. [Google Scholar]
46. Xiao, Y. H., Zhen, H. (2017). Pedestrian crowd detection based unmanned aerial vehicle infrared imagery. Proceedings of 4th International Conference on Advanced Materials, Structures and Mechanical Engineering (ICAMSME), Incheon, South Korea. [Google Scholar]
47. Schulte, S., Hillen, F., Prinz, T. (2017). Analysis of combined UAV-based RGB and thermal remote sensing data: A new approach to crowd monitoring. The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 42, 347–354. https://doi.org/10.5194/isprs-archives-XLII-2-W6-347-2017 [Google Scholar] [CrossRef]
48. Xiao, Y., Zheng, H., Yu, W. (2017). Automatic crowd detection based on unmanned aerial vehicle thermal imagery. Proceedings of the 11th International Conference on Mechatronics and Intelligent Robotics (ICMIR), Kunming, China. [Google Scholar]
49. Wang, Z., Li, M., Khaleghi, A. M., Xu, D., Lobos, A. et al. (2013). DDDAMS-based crowd control via UAVs and UGVs. Procedia Computer Science, 18(5), 2028–2035. https://doi.org/10.1016/j.procs.2013.05.372 [Google Scholar] [CrossRef]
50. Wang, Q., Breckon, T. P. (2022). Crowd counting via segmentation guided attention networks and curriculum loss. IEEE Transactions on Intelligent Transportation Systems, 23(9), 15233–15243. https://doi.org/10.1109/TITS.2021.3138896 [Google Scholar] [CrossRef]
51. Delussu, R., Putzu, L., Fumera, G. (2022). Scene-specific crowd counting using synthetic training images. Pattern Recognition, 124(5), 108484. https://doi.org/10.1016/j.patcog.2021.108484 [Google Scholar] [CrossRef]
52. Kurnaz, O., Hanilçi, C. (2022). Multi-image crowd counting using multi-column convolutional neural network. Proceedings of 6th International Congress on Information and Communication Technology, London, UK. [Google Scholar]
53. Gouiaa, R., Akhloufi, M. A., Shahbazi, M. (2021). Advances in convolution neural networks based crowd counting and density estimation. Big Data and Cognitive Computing, 5(4), 50. https://doi.org/10.3390/bdcc5040050 [Google Scholar] [CrossRef]
54. Hu, Z., Cao, W., Wu, F., Zhang, Z., Dong, C. et al. (2021). A real-time UAV crowd counting system based on edge computing. Proceedings of 13th International Conference on Wireless Communications and Signal Processing (WCSP), Jiangsu, China. [Google Scholar]
55. Zhang, B., Du, Y., Zhao, Y., Wan, J., Tong, Z. (2021). I-MMCCN: Improved MMCCN for RGB-T crowd counting of drone images. Proceedings of 7th IEEE International Conference on Network Intelligence and Digital Content (IC-NIDC), Beijing, China. [Google Scholar]
56. Castellano, G., Castiello, C., Cianciotta, M., Mencar, C., Vessio, G. (2020). Multi-view convolutional network for crowd counting in drone-captured images. Proceedings of European Conference on Computer Vision (ECCV), Edinburgh, UK. [Google Scholar]
57. Liu, W., Lis, K., Salzmann, M., Fua, P. (2019). Geometric and physical constraints for drone-based head plane crowd density estimation. Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China. [Google Scholar]
58. Balbin, J. R., Garcia, R. G., Fernandez, K. E. D., Golosinda, N. P. G., Magpayo, K. D. G. et al. (2018). Crowd counting system by facial recognition using histogram of oriented gradients, completed local binary pattern, gray-level co-occurrence matrix and unmanned aerial vehicle. Proceedings of 3rd International Workshop on Pattern Recognition (WPR), Jinan, China. [Google Scholar]
59. Choi-Fitzpatrick, A., Juskauskas, T. (2015). Up in the air: Applying the Jacobs crowd formula to drone imagery. Procedia Engineering, 107, 273–281. https://doi.org/10.1016/j.proeng.2015.06.082 [Google Scholar] [CrossRef]
60. Saif, A., Mahayuddin, Z. R. (2021). Crowd density estimation from autonomous drones using deep learning: Challenges and applications. Journal of Engineering and Science Research, 5(6), 1–6. https://doi.org/10.26666/rmp.jesr.2021.6.1 [Google Scholar] [CrossRef]
61. Bouhlel, F., Mliki, H., Hammami, M. (2021). Abnormal crowd density estimation in aerial images based on the deep and handcrafted features fusion. Expert Systems with Applications, 173, 114656. https://doi.org/10.1016/j.eswa.2021.114656 [Google Scholar] [CrossRef]
62. Nafea, I. T. (2021). Simulation of crowd management using deep learning algorithm. International Journal of Web Information Systems, 17(4), 321–332. https://doi.org/10.1108/IJWIS-04-2021-0045 [Google Scholar] [CrossRef]
63. Trotta, A., Muncuk, U., di Felice, M., Chowdhury, K. R. (2020). Persistent crowd tracking using unmanned aerial vehicle swarms: A novel framework for energy and mobility management. IEEE Vehicular Technology Magazine, 15(2), 96–103. https://doi.org/10.1109/MVT.2020.2982244 [Google Scholar] [CrossRef]
64. de Moraes, R. S., de Freitas, E. P. (2019). Multi-UAV based crowd monitoring system. IEEE Transactions on Aerospace and Electronic Systems, 56(2), 1332–1345. https://doi.org/10.1109/TAES.2019.2952420 [Google Scholar] [CrossRef]
65. Yuan, Y., Wang, Z., Li, M., Son, Y. J., Liu, J. (2015). DDDAS-based information-aggregation for crowd dynamics modeling with UAVs and UGVs. Frontiers in Robotics and AI, 2, 8. https://doi.org/10.3389/frobt.2015.00008 [Google Scholar] [CrossRef]
66. Müller, T., Müller, M. (2011). Vision-based drone flight control and crowd or riot analysis with efficient color histogram based tracking. Proceedings of Airborne Intelligence, Surveillance, Reconnaissance (ISR), Orlando, Florida, USA. [Google Scholar]
67. Shao, Y., Li, W., Chu, H., Chang, Z., Zhang, X. et al. (2020). A multitask cascading CNN with multiscale infrared optical flow feature fusion-based abnormal crowd behavior monitoring UAV. Sensors, 20(19), 5550. https://doi.org/10.3390/s20195550 [Google Scholar] [PubMed] [CrossRef]
68. Singh, A., Patil, D., Omkar, S. (2018). Eye in the sky: Real-time drone surveillance system (DSS) for violent individuals identification using scatternet hybrid deep learning network. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, USA. [Google Scholar]
69. Alotaibi, M., Clarke, G., Malleson, N. (2020). Optimal service planning in a temporary city. Journal of Service Science and Management, 13(5), 709–728. https://doi.org/10.4236/jssm.2020.135045 [Google Scholar] [CrossRef]
70. Shambour, M. K., Gutub, A. (2021). Progress of IoT research technologies and applications serving Hajj and Umrah. Arabian Journal for Science and Engineering, 47, 1253–1273. [Google Scholar] [PubMed]
71. Felemban, E. A., Rehman, F. U., Biabani, S. A. A., Ahmad, A., Naseer, A. et al. (2020). Digital revolution for Hajj crowd management: A technology survey. IEEE Access, 8, 208583–208609. https://doi.org/10.1109/ACCESS.2020.3037396 [Google Scholar] [CrossRef]
72. Sharma, D., Bhondekar, A. P., Shukla, A., Ghanshyam, C. (2018). A review on technological advancements in crowd management. Journal of Ambient Intelligence and Humanized Computing, 9(3), 485–495. https://doi.org/10.1007/s12652-016-0432-x [Google Scholar] [CrossRef]
73. Yamin, M., Basahel, A. M., Abi Sen, A. A. (2018). Managing crowds with wireless and mobile technologies. Wireless Communications and Mobile Computing, 2018(3), 1–15. https://doi.org/10.1155/2018/7361597 [Google Scholar] [CrossRef]
74. Kurdi, O. (2017). Crowd modelling and simulation (Ph.D. Thesis). University of Sheffield, UK. [Google Scholar]
75. Al-Salhie, L., Al-Zuhair, M., Al-Wabil, A. (2014). Multimedia surveillance in event detection: Crowd analytics in Hajj. Proceedings of 3rd International Conference of Design, User Experience, and Usability (DUXU), Crete, Greece. [Google Scholar]
76. Alaska, Y. A., Aldawas, A. D., Aljerian, N. A., Memish, Z. A., Suner, S. (2017). The impact of crowd control measures on the occurrence of stampedes during mass gatherings: The Hajj experience. Travel Medicine and Infectious Disease, 15(5), 67–70. https://doi.org/10.1016/j.tmaid.2016.09.002 [Google Scholar] [PubMed] [CrossRef]
77. Illiyas, F. T., Mani, S. K., Pradeepkumar, A., Mohan, K. (2013). Human stampedes during religious festivals: A comparative review of mass gathering emergencies in India. International Journal of Disaster Risk Reduction, 5, 10–18. https://doi.org/10.1016/j.ijdrr.2013.09.003 [Google Scholar] [CrossRef]
78. Hutchins, B., Andrejevcic, M. (2021). Olympian surveillance: Sports stadiums and the normalization of biometric monitoring. International Journal of Communication, 15, 20. [Google Scholar]
79. Robakowska, M., Tyranska-Fobke, A., Nowak, J., Slezak, D., Zuratynski, P. et al. (2017). The use of drones during mass events. Disaster and Emergency Medicine Journal, 2(3), 129–134. https://doi.org/10.5603/DEMJ.2017.0028 [Google Scholar] [CrossRef]
80. Birtchnell, T., Gibson, C. (2015). Less talk more drone: Social research with UAVs. Journal of Geography in Higher Education, 39(1), 182–189. https://doi.org/10.1080/03098265.2014.1003799 [Google Scholar] [CrossRef]
81. Meinhold, R. J., Singpurwalla, N. D. (1983). Understanding the Kalman filter. The American Statistician, 37(2), 123–127. [Google Scholar]
82. Arulampalam, M. S., Maskell, S., Gordon, N., Clapp, T. (2002). A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 50(2), 174–188. https://doi.org/10.1109/78.978374 [Google Scholar] [CrossRef]
83. Silbert, M., Mazzuchi, T., Sarkani, S. (2011). Comparison of a grid-based filter to a Kalman filter for the state estimation of a maneuvering target. Proceedings of Signal and Data Processing of Small Targets (SDPST), San Diego, California, USA. [Google Scholar]
84. Weidmann, U. (1993). Dimensionierung von Fussgängeranlagen. In: Transporttechnik der fussgänger, vol. 90, pp. 55–84. Zurich: Schriftenreihe des IVT. [Google Scholar]
85. Helbing, D. (2009). Derivation of a fundamental diagram for urban traffic flow. The European Physical Journal B, 70(2), 229–241. https://doi.org/10.1140/epjb/e2009-00093-7 [Google Scholar] [CrossRef]
86. Wirz, M., Franke, T., Roggen, D., Mitleton-Kelly, E., Lukowicz, P. et al. (2013). Probing crowd density through smartphones in city-scale mass gatherings. EPJ Data Science, 2(1), 1–24. https://doi.org/10.1140/epjds17 [Google Scholar] [CrossRef]
87. Vargas, A. P., Díaz, D., Jaramillo, S., Rangel, F., Villa, D. et al. (2022). Improving the tactical planning of solid waste collection with prescriptive analytics: A case study. Production, 32(8). https://doi.org/10.1590/0103-6513.20210037 [Google Scholar] [CrossRef]
88. Lahyani, R., Chebil, K., Khemakhem, M., Coelho, L. C. (2019). Matheuristics for solving the multiple knapsack problem with setup. Computers & Industrial Engineering, 129(3), 76–89. https://doi.org/10.1016/j.cie.2019.01.010 [Google Scholar] [CrossRef]
89. Haddar, B., Khemakhem, M., Hanafi, S., Wilbaut, C. (2015). A hybrid heuristic for the 0–1 knapsack sharing problem. Expert systems with Applications, 42(10), 4653–4666.https://doi.org/10.1016/j.eswa.2015.01.049 [Google Scholar] [CrossRef]
90. Haddar, B., Khemakhem, M., Rhimi, H., Chabchoub, H. (2016). A quantum particle swarm optimization for the 0–1 generalized knapsack sharing problem. Natural Computing, 15(1), 153–164. https://doi.org/10.1007/s11047-014-9470-5 [Google Scholar] [CrossRef]
91. Hbaieb, A., Khemakhem, M., Ben Jemaa, M. (2021). Virtual machine placement with disk anti-colocation constraints using variable neighborhood search heuristic. Information Systems Frontiers, 23(5), 1245–1271. https://doi.org/10.1007/s10796-020-10025-4 [Google Scholar] [CrossRef]
92. Zhu, T., Boyles, S. D., Unnikrishnan, A. (2022). Two-stage robust facility location problem with drones. Transportation Research Part C: Emerging Technologies, 137(4), 103563. https://doi.org/10.1016/j.trc.2022.103563 [Google Scholar] [CrossRef]
93. Omidi, S., Fathali, J. (2022). Inverse single facility location problem on a tree with balancing on the distance of server to clients. Journal of Industrial & Management Optimization, 18(2), 1247–1259. https://doi.org/10.3934/jimo.2021017 [Google Scholar] [CrossRef]
94. Ryu, J., Park, S. (2022). A branch-and-price algorithm for the robust single-source capacitated facility location problem under demand uncertainty. EURO Journal on Transportation and Logistics, 11(6), 100069. https://doi.org/10.1016/j.ejtl.2021.100069 [Google Scholar] [CrossRef]
95. Qin, W., Shi, Z., Li, W., Li, K., Zhang, T. et al. (2021). Multiobjective routing optimization of mobile charging vehicles for UAV power supply guarantees. Computers & Industrial Engineering, 162(2), 107714. https://doi.org/10.1016/j.cie.2021.107714 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools